1. Introduction
With the rapid development of industrial automation and robotics technology, parallel mechanisms, constituting a significant subdivision within the realm of robotics, have received considerable attention on account of their distinctive structural advantages and wide application prospects. Due to the remarkable features, specifically high rigidity, elevated precision and a superior load-to-weight ratio, the Stewart platform, serving as a pivotal 6-degree-of-freedom (6-DOF) parallel mechanism, has manifested substantial application potential across diverse fields like aerospace, precision manufacturing, and simulator realms. Nevertheless, the singularity of the Stewart platform in specific situations has always been one of the key factors restricting the performance and wide application. For the Stewart platform, singularity refers to the situation where the determinant of Jacobian matrix is zero or close to zero under certain configurations. When singularity occurs, the mechanism loses the control stability and may even suffer damage or experience task failure. Therefore, exploring the maximum singularity-free joint space and workspace of the Stewart platform is highly significant for ensuring the stability of the mechanism during motion.
In the existing works, the determination of singularity-free space often failed to simultaneously consider both the position and orientation of the mobile platform [
1,
2,
3,
4,
5,
6,
7]. In fact, considering only the singularity of the position or solely focusing on the singularity of orientation is inappropriate because both of them are fundamentally interconnected in determining the overall spatial configuration and functionality of the system. Additionally, using a weighting coefficient to consider the singularity-free spaces associated with only position and only orientation, and thereby correlate position and orientation, is flawed due to the lack of a clear physical meaning [
8]. Considering the position and orientation simultaneously, Pernkopf et al. [
9] first proposed the method of calculating maximal singularity-free workspace of the Stewart platform. Nonetheless, that method has low computational efficiency. The researches on the computation of singularity-free space were mainly conducted based on Euler angles [
10,
11,
12,
13] and unit quaternion [
14,
15,
16,
17].
The existing methods of computing the singularity-free space are categorized as geometrical methods, numerical methods, and discretization methods. The geometric method is a way to determine the position and orientation for a parallel mechanism to avoid singular configurations by analyzing the kinematic equations and geometric constraint relations of the parallel mechanism. A common limitation of the geometrical method is the disregard for mechanical interfaces and other physical constraints [
18,
19,
20], which is inapplicable to some geometric configuration and does not simultaneously consider position and orientation. Moreover, Li et al. [
21] employed a screw-theory-based geometrical approach, which yielded two Jacobian matrices, and subsequently analyzed their singular conditions. The time complexity of geometrical method is
).
Numerical methods comprehensively incorporate the kinematic equations of the parallel mechanism, structural constraint conditions, and the variation ranges of leg lengths. The objective is to solve the position and orientation ranges where the mechanism can evade singular configurations, thus ascertaining the singularity-free workspace. An evolutionary strategy was used by Liu et al. [
22] to detect the singularity in the desired reachable workspace of the 6-UCU parallel manipulator. Assuming that the number of iterations, the population size, and the gene length per individual in Ref. [
22] is
,
,
, respectively, then the time complexity is
). Merlet [
23] adopted numerical techniques to determine the singularity-free workspace of the Stewart platform, and the time complexity
) where the number of equally divided segments in the interval analysis method for each dimension was
. Kaloorazi et al. [
24] used the interval analysis method to compute singularity-free circles in the position workspace of parallel mechanisms with the time complexity
, where the number of equally divided parts is
. Abbasnejad et al. [
25] computed singularity-free space by using the particle swarm optimization technique, and the time complexity was
), where the number of iterations, the swarm size, and the dimension of each particle was
,
, and
, respectively. Nag et al. [
26] solved the problem of finding a sphere free of singularities of the Stewart platform manipulators in either the position or the orientation workspace with numerical approaches. When the sphere is uniformly sampled into
segments, the time complexity is
). Nevertheless, when multiple solutions exist, the numerical method is not applicable due to the difficulties in selecting the appropriate solution from all possible ones.
The discrete method involves discretizing the workspace of the Stewart platform into a set of points. For each of these points, the kinematic equations and the Jacobian matrix of the platform are evaluated. The determination of whether the corresponding point lies within the singularity-free space is made by checking the determinant of the Jacobian matrix. Most discrete methods do not take into account the determination of singularity by the initial values of the Newton–Raphson method in the procedure of forward kinematics. One can assume that the number of iterations is
. Furthermore, one can assume that within the discretization method, each active joint space, as well as position and orientation, is divided into
segments. Wang et al. [
27] proposed a unified numerical method to solve the reachable and dexterous workspace boundary problems of parallel robots, and the time complexity is
). Nevertheless, only three-direction DOFs are considered. Cheng et al. [
28] obtained eight equivalent equations, which can be used to analyze the singularity of the 6-SPS parallel mechanism, and the time complexity is
) with a designed position or orientation. Ding [
29] searched for all the discrete points within the feasible space with a predefined step size and provided a detailed exploration of the constraints and optimization strategies for maximizing the workspace of a spatially isotropic Stewart platform with the time complexity of
. Nevertheless, that method only takes into account the position or orientation space. Yang et al. [
30] proposed a discretization method for calculating the dimensionless Jacobian matrix of a 6-DOF parallel robot using dual quaternions (DM-DQ), and the singularity-free joint space and workspace were simultaneously calculated. The DM-DQ method had the time complexity of
. Nevertheless, the aforementioned methods still failed to address the problem of computation time and calculation precision. The methods [
27,
28,
29,
30] were conducted based on unit quaternion. The comparison of the existing algorithms for computing singularity-free space is illustrated in
Table 1.
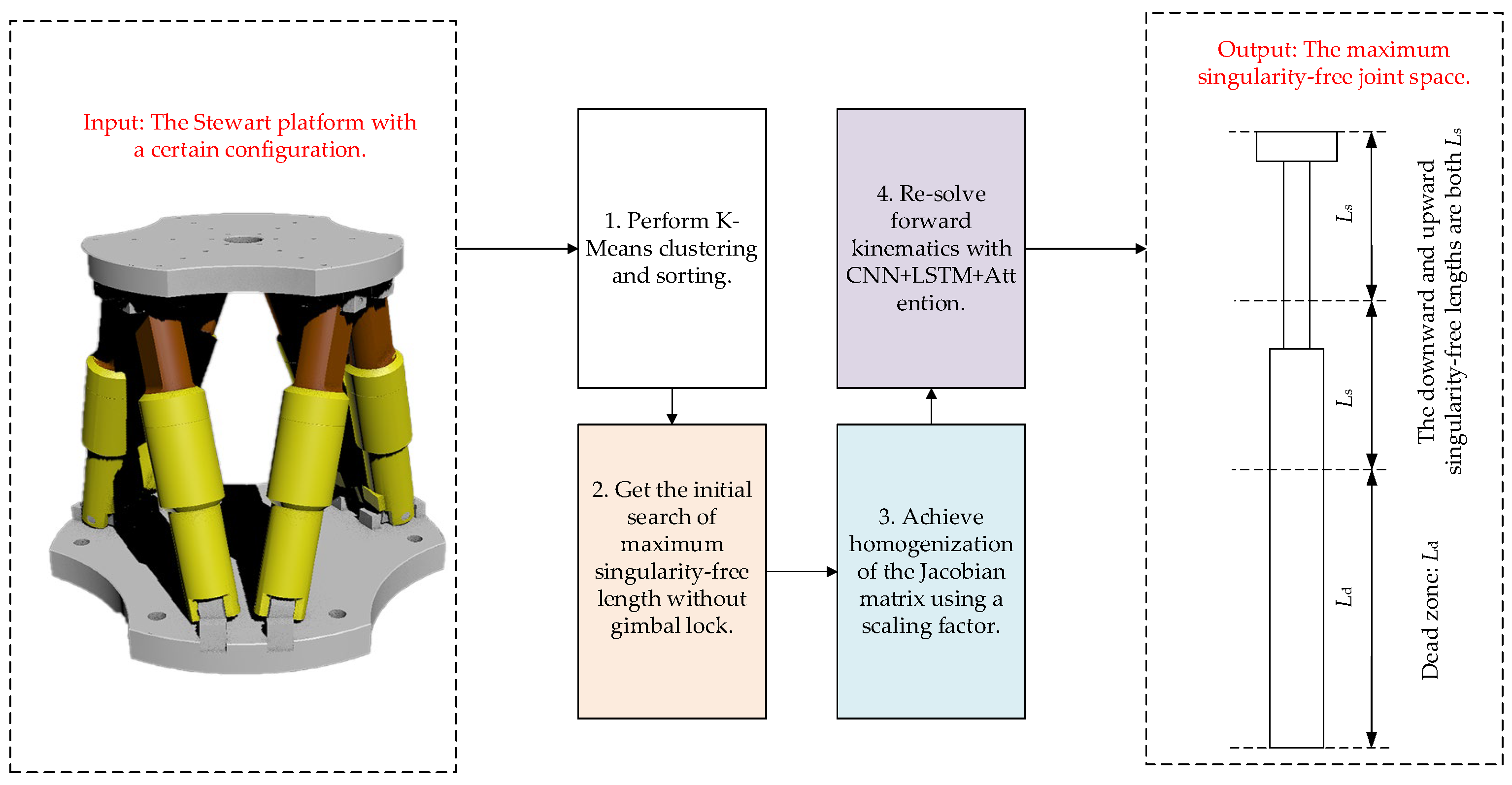
To overcome those deficiencies and obtain the maximum singularity-free joint space and workspace in a more rapid, precise, and reliable manner, this work proposes an efficient and high-precision method of calculating maximum singularity-free space in the Stewart platform based on K-Means clustering and the CNN-LSTM-Attention model, avoiding the singularity of the Jacobian matrix in the case of inappropriate initial values in the numerical part. Firstly, K-Means clustering and sorting operations are carried out. These operations can reduce the computational load without affecting the feature diversity. Secondly, the initial search for the maximum singularity-free length without gimbal lock is conducted. When the gimbal lock appears, the loss of DOFs may reduce the rank of the Jacobian matrix, thereby driving the determinant of Jacobian matrix to zero or near-zero values and triggering singularity. Thirdly, the homogenization of the Jacobian matrix is accomplished with a scaling factor. When the product of the determinants of the newly constructed Jacobian matrices corresponds to the natural position and a specific posture is less than or equal to zero, the occurrence of singularity in that situation is indicated. Finally, forward kinematics is re-solved using the CNN-LSTM-Attention model. The contributions and novelties of this work are presented as follows.
This work proposes the K-Means clustering and sorting approach to efficiently identify the desired space, ensuring the diversity of rod length combinations while improving computational efficiency, compared with the previous methods.
This work puts forward an accurate analytical approach without the gimbal lock, avoiding the emergence of complex kinematic solutions and the deterioration of control accuracy and stability in previous works.
This work proposes a new dimension scaling factor to handle the problem of inconsistent dimensions between rotation and translation. The newly constructed Jacobian matrix is utilized to determine singularity.
This work utilizes the CNN-LSTM-Attention model to tackle singularities in the forward kinematics caused by zero-position values, solving the problem of unreliability in the search procedure of the previous works.
The structure of this paper is arranged as follows.
Section 2 presents the overview of the proposed method.
Section 3 introduces the mathematical model of the Stewart platform.
Section 4 explores the discretization method for computing the maximum singularity-free joint space and workspace.
Section 5 presents experiments to validate the method’s efficiency, precision and reliability.
Section 6 concludes with a summary.
3. The Mathematical Model of the Stewart Platform
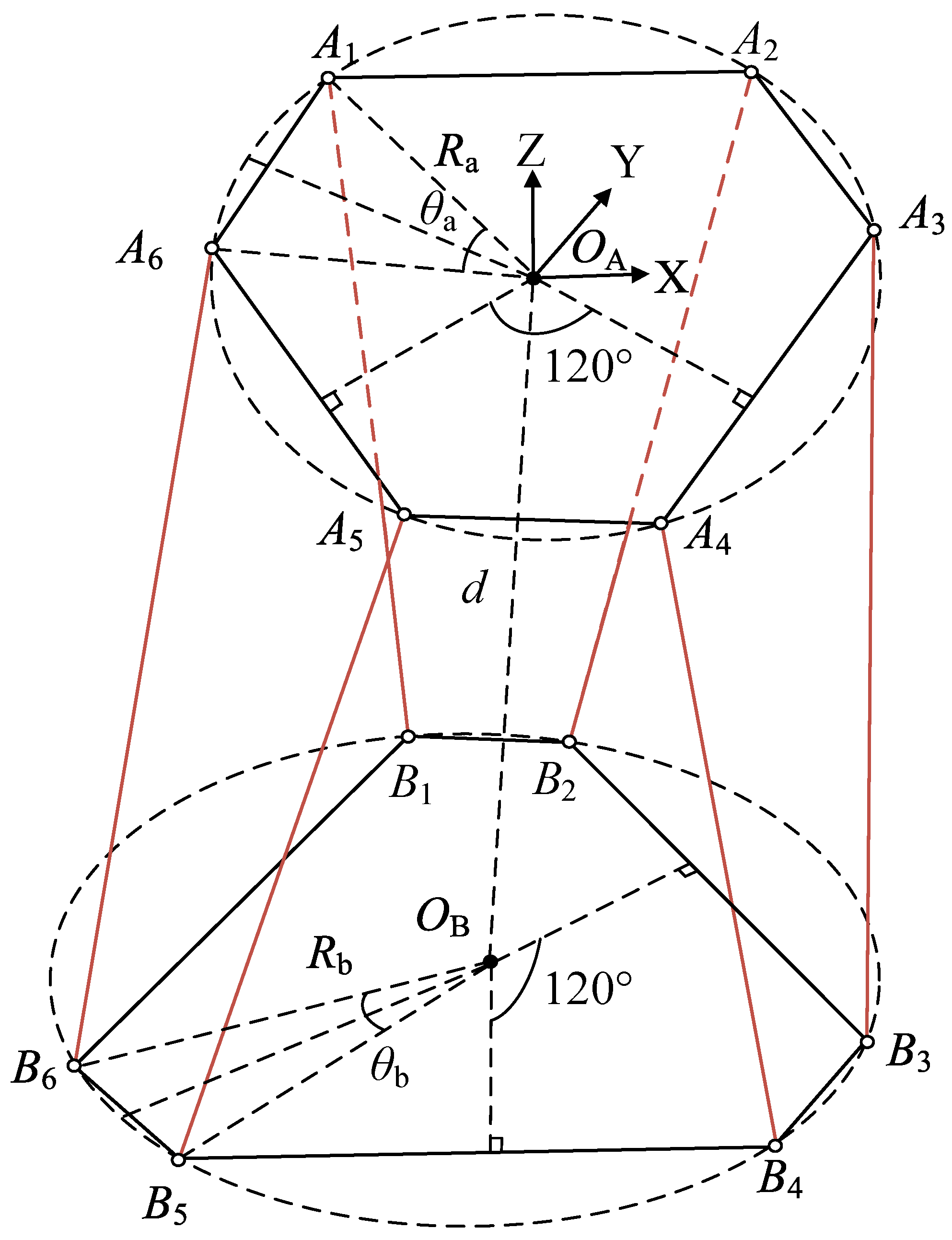
The Stewart platform is composed of a moving platform, a fixed platform, and electric cylinders. Each joint point on the moving platform and fixed platform are denoted as () and (). The Stewart platform usually has five structural parameters: the moving and fixed platform radii are and , the angles are and , and the distance between the moving and fixed platforms is when the Stewart platform is in the initial assembly configuration.
As shown in
Figure 2, the joint points on the moving and fixed platform are usually on a circle. The coordinates of joint points on the moving platform are given as follows. In
Figure 2, the solid red lines represent the active joints, and the solid black lines represent the moving platform and the fixed platform.
The coordinates of joint points on the fixed platform are given as follows.
When dealing with forward kinematics, the position and orientation are determined in accordance with the lengths of the rods. Conversely, during the solution of the inverse kinematics, the rod length is calculated based on the position and orientation. In contrast to the forward kinematics issue, the inverse kinematics problem is comparatively less complex.
The inverse kinematics problem involves calculating the actuator lengths based on a given pose
of the moving platform. Let
,
, and
be the angles of rotation around the three axes of the Cartesian coordinate system, representing the pitch, roll, and yaw angles, respectively. Meanwhile, let
,
, and
be the translational displacements along these axes, corresponding to surge, sway, and heave, respectively.
R denotes the rotation matrix expressed in the Euler angle representation of pitch–roll–yaw, as detailed below.
With the reference frame fixed, the coordinates of the joint points on the moving platform and fixed platform are
and
(
= 1,…,6), and six electric actuator vectors
(
= 1,…,6) can be expressed as follows.
Techniques for rigid-body rotation include direction cosines and quaternions. Direction cosines need nine parameters, while quaternions only need four, making quaternions more concise. Compared with direction-cosine-based methods, quaternions greatly reduce trigonometric calculation complexity. Dual quaternions describe full rigid-body motion in a unified and efficient manner, thereby simplifying computations and providing a more straightforward approach compared to direction cosines.
A dual quaternion is a mathematical construct consisting of an even number of elements, where both the real and dual components are quaternions. In contrast to standard quaternions that can only represent spatial rotations, dual quaternions have the ability to describe any combination of spatial rotation and translation.
and
form a dual quaternion
.
where
is a dual unit, and
. Inside,
,
.
The homogeneous rotation matrix
T can be expressed by dual quaternions as follows.
4. Discretization Method for Calculating Maximum Singularity-Free Joint Space and Workspace
4.1. K-Means Clustering Followed by Sorting
As the active joint space expands, the position and orientation range increases. Simultaneously, the singularity of the Jacobian matrix usually emerges in the extreme combinations of active joint lengths. When each rod is fully extended or fully retracted, 64 extreme combinations are obtained. Nevertheless, these 64 extreme combinations of rod lengths do not fully represent the absence of singularities within the workspace. To accurately determine if there are singular solutions in the space, appropriate combinations of rod lengths within the allowed range must be selected.
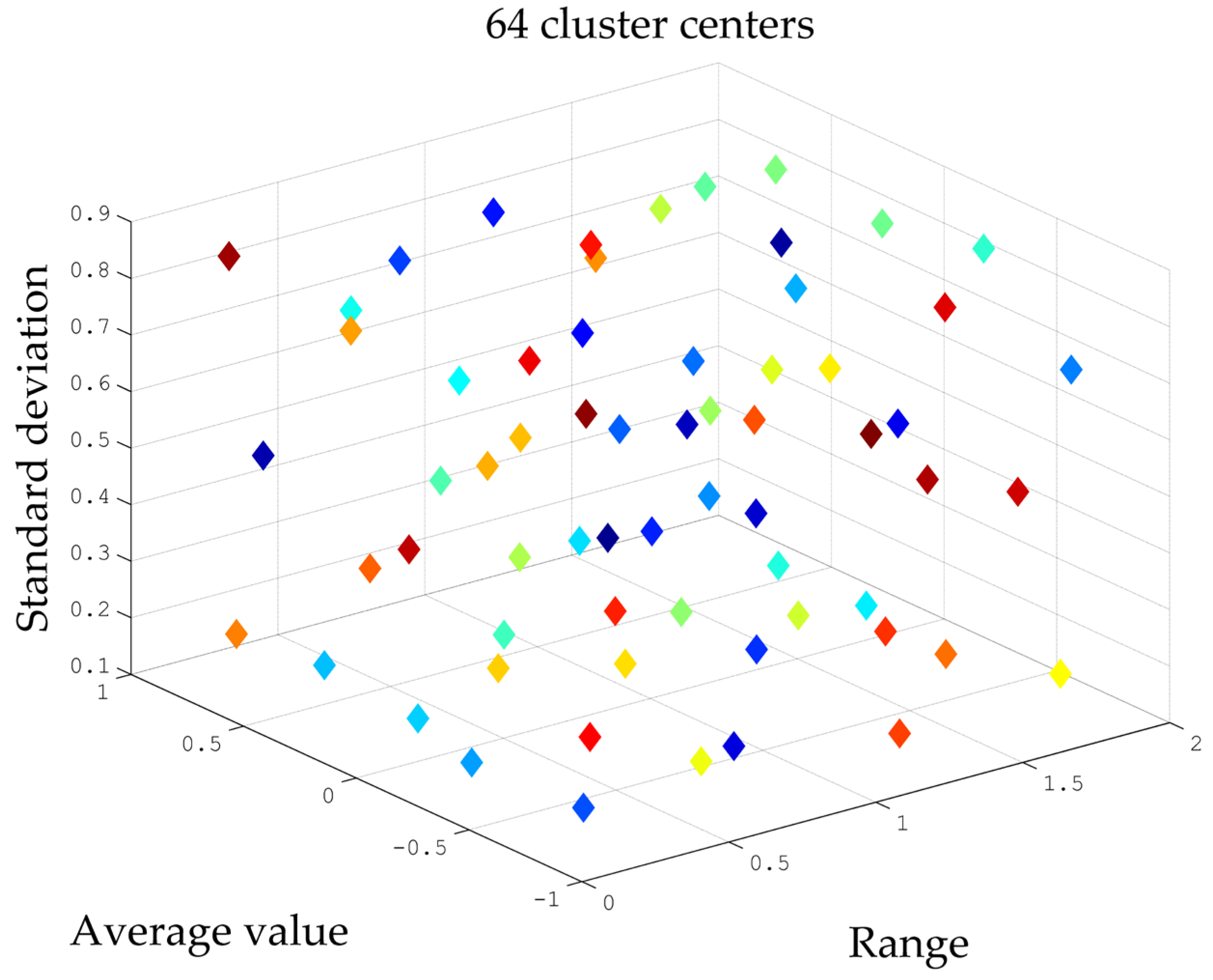
For the Stewart platform, the lengths of drive rods range from to . Subsequently, each rod length is normalized to the interval [−1, 1]. That normalization step ensures that the results of the 64-group clustering for each driving rod length remain invariant. Firstly, divide each rod into equal parts, resulting in possible rod length combinations. Secondly, calculate the values of the features , , and individually. Thirdly, employ the K-Means clustering method to categorize these three features into 64 groups. Finally, based on the results of the K-Means clustering, 64 combinations of rod lengths within the range [−1, 1] can be obtained. The lengths of six drive rods are ,…,, and , and are, respectively, defined as the range, the average value, and the standard deviation of the six drive rods, as detailed below.
The range of six drive rod lengths is the difference between the maximum and minimum values, and the calculation formula is shown below.
The average of the six drive rod lengths is
The standard deviation of the six drive rod lengths is
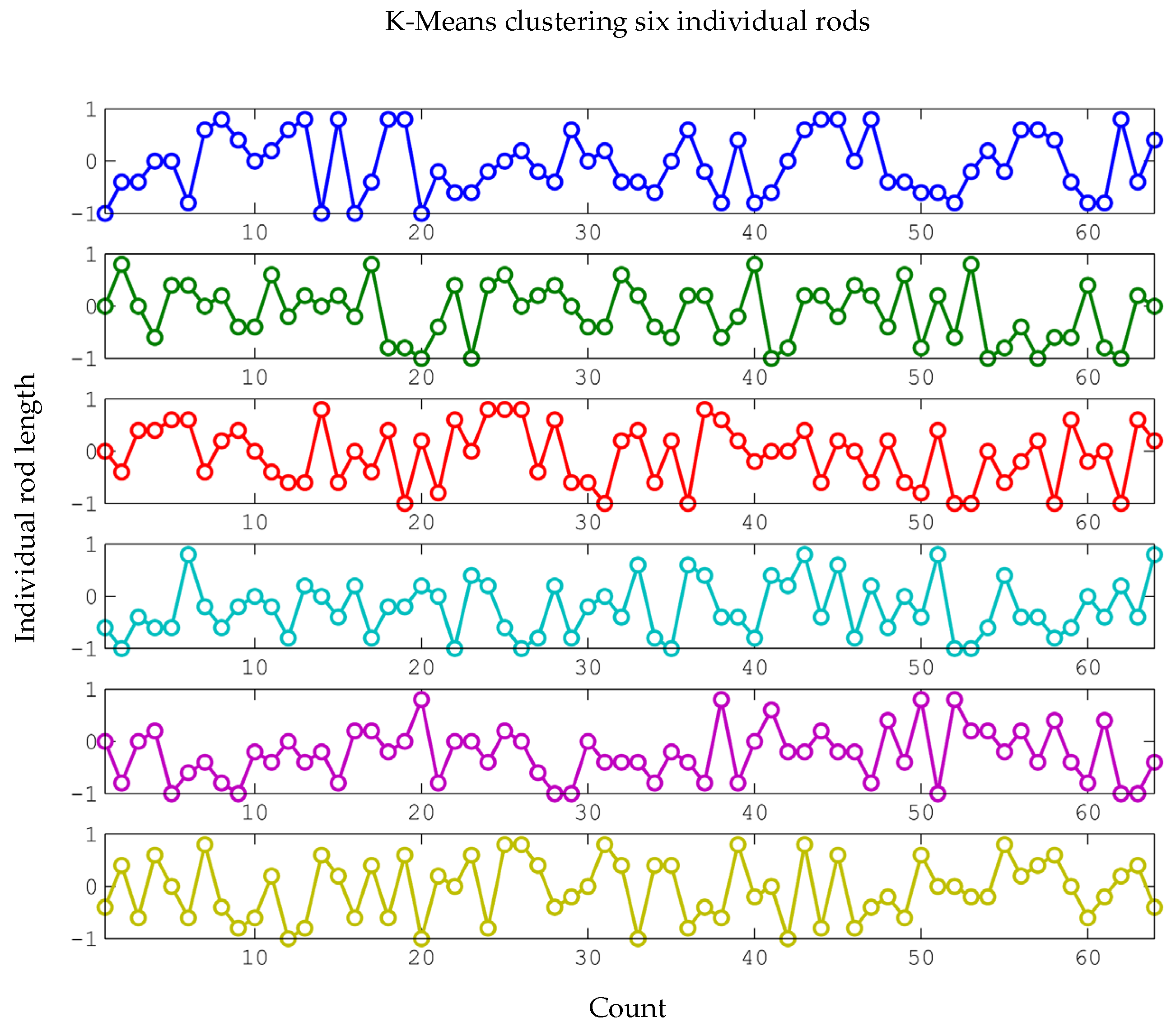
The centroids of K-Means clustering are shown in
Figure 3. Specifically, these centroids are differentiated by distinct colors.
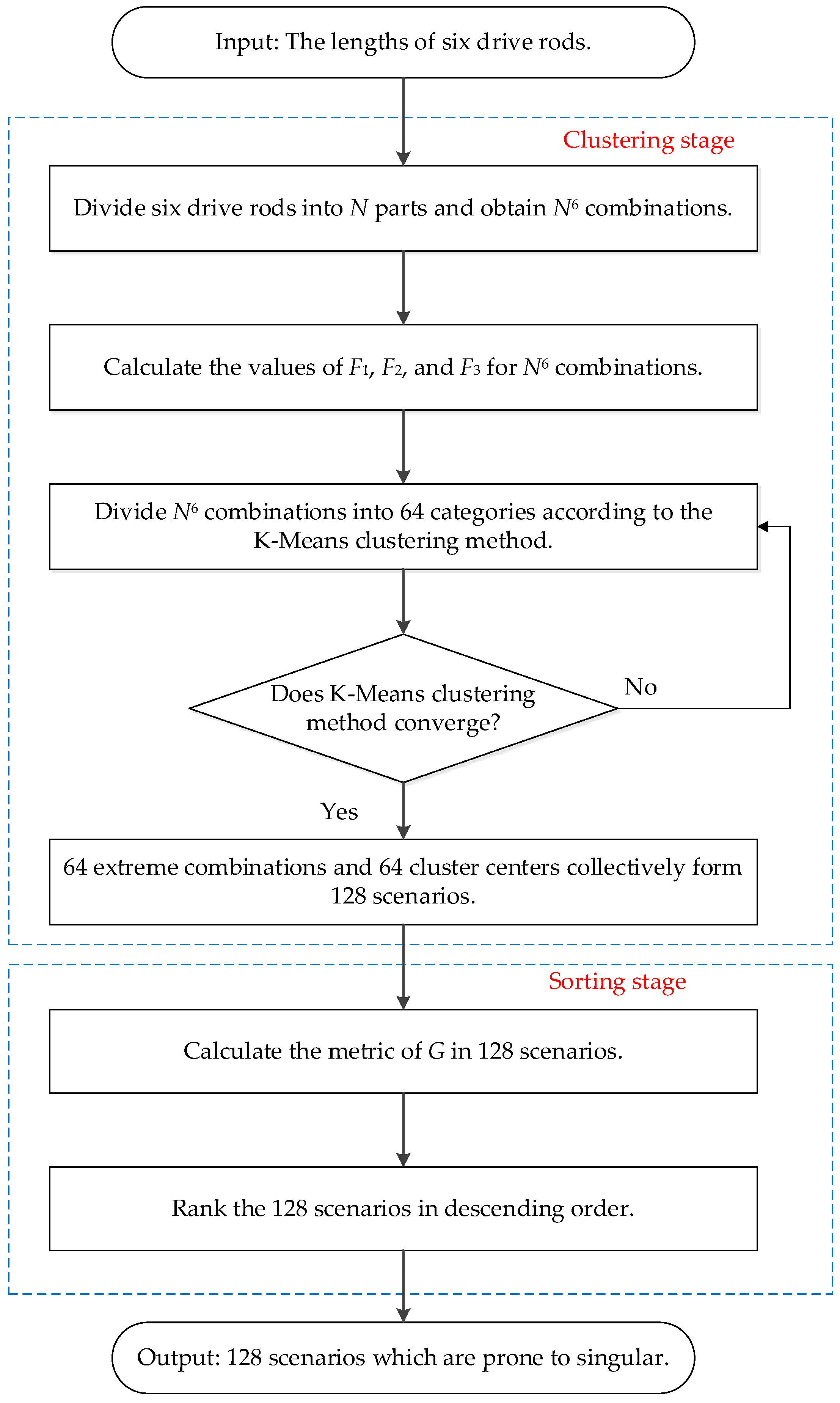
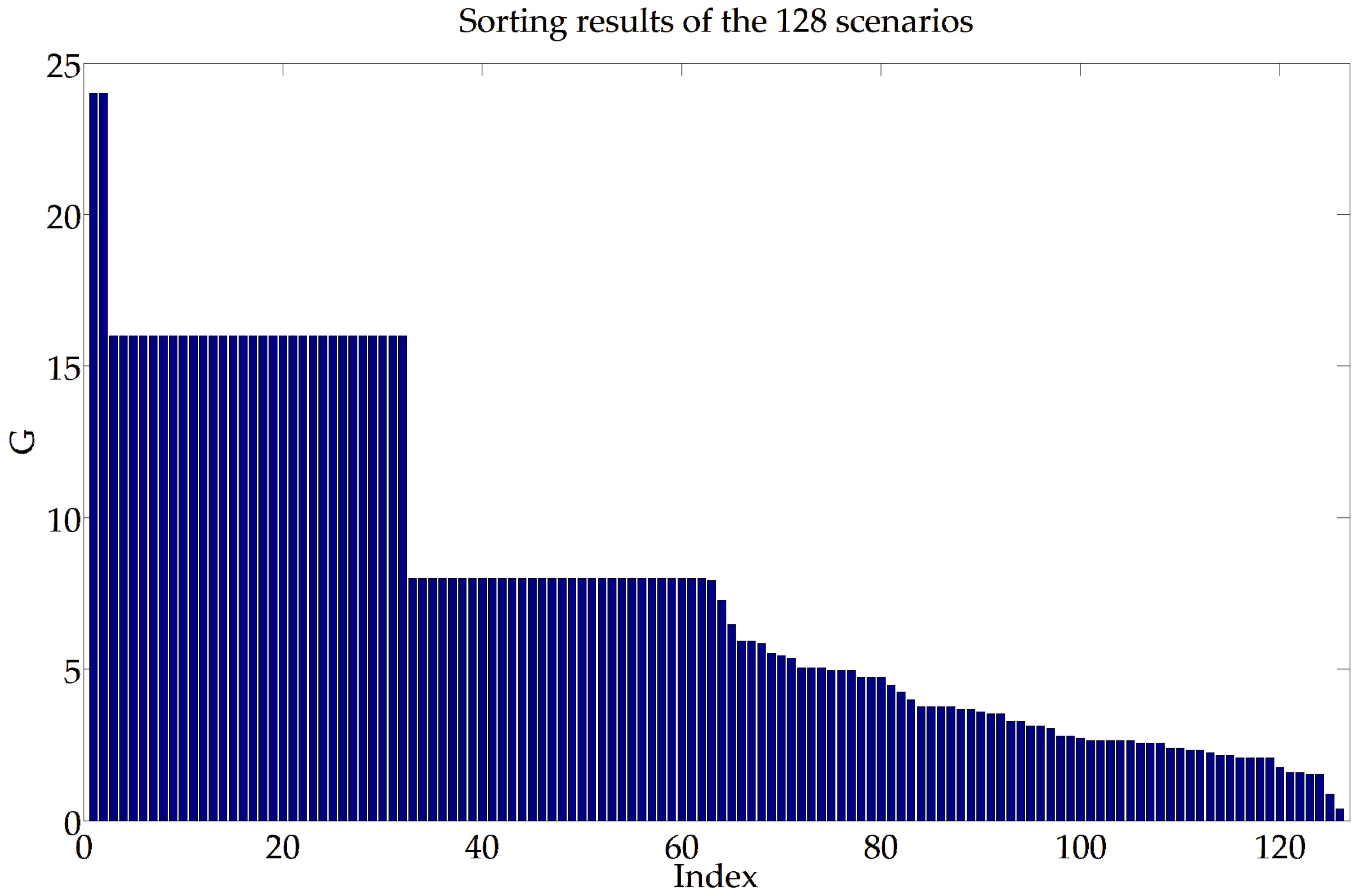
The 64 extreme combinations and 64 cluster centers collectively form 128 scenarios, which are ranked based on the metric .
The circular sum of squared differences in the six drive rod lengths is
In the clustering stage, each of the six driving rods is divided into parts, and different categories are acquired in accordance with the K-Means clustering method. The extreme combinations and cluster centers jointly constitute the whole scenarios. In the sorting stage, all the scenarios are ranked based on the metric of .
Typically, the Stewart platform has six DOFs in total for rotation and translation. The time complexity of the previous discretization methods is , where is the dimension of position or orientation, and there is a trade-off between accuracy and efficiency. After applying the extreme link–length combinations and the K-Means method, the time complexity is reduced to ), without sacrificing the diversity of the combinations.
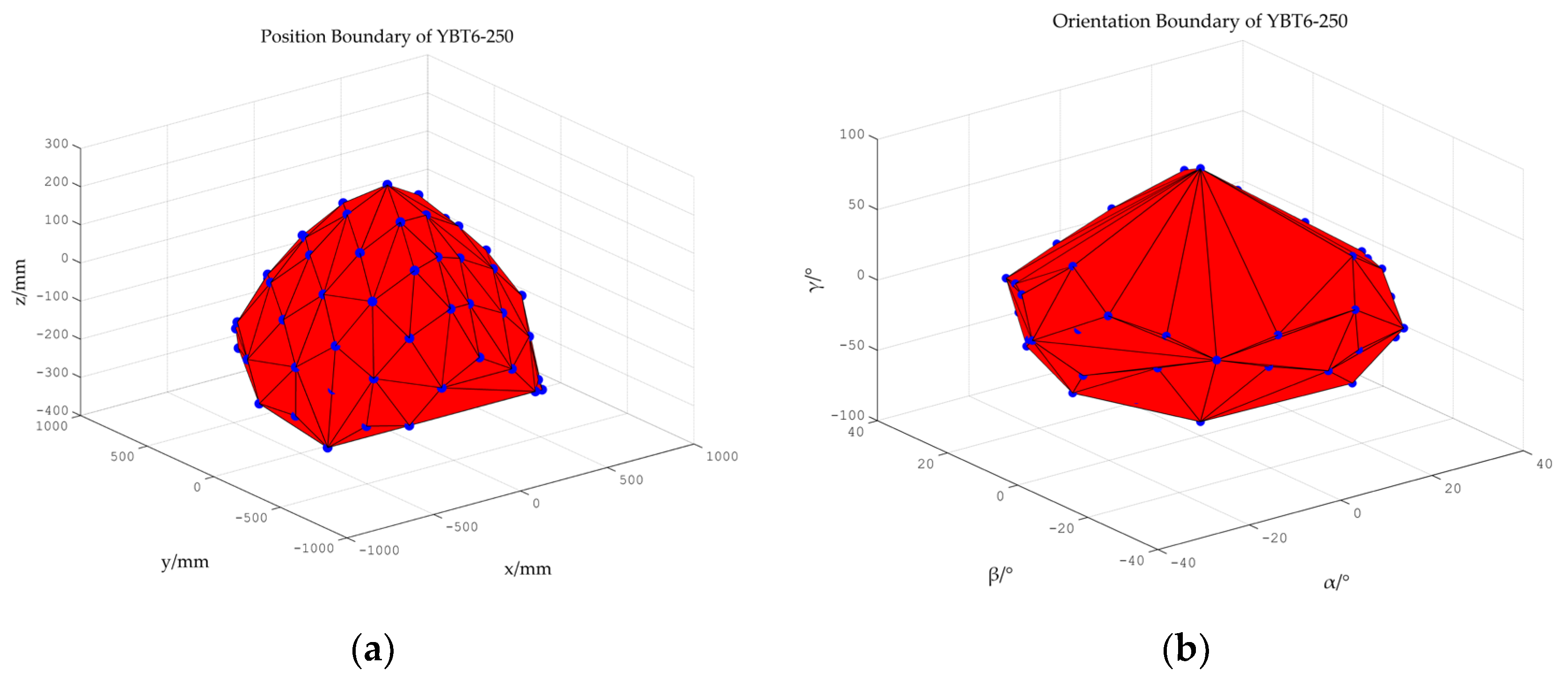
The results in
Figure 4 are used to determine whether the forward kinematics is singular under the given set of rod lengths, thereby assisting in finding the maximum singularity-free joint space. By calculating the 128 scenarios, the singularity of the Stewart platform at that rod length configuration can be determined. The search procedure will not stop until the difference in the lengths of the rods between two consecutive instances is less than the predefined threshold.
4.2. Obtain the Initial Search of Maximum Singularity-Free Length Without Gimbal Lock
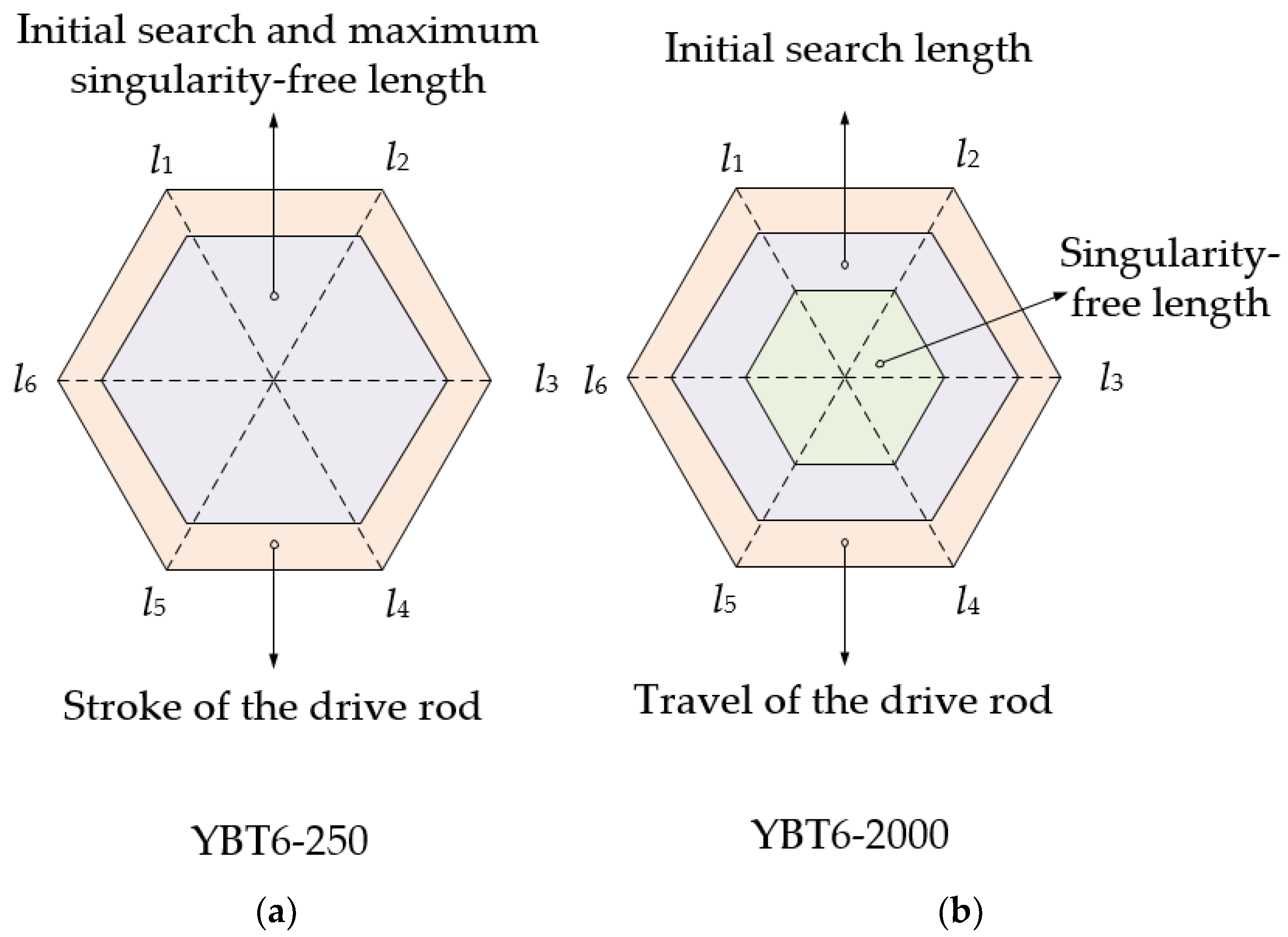
The Stewart platform experiences gimbal lock at 90°. Once any of Euler angles passes 90°, then singularities emerge, thereby leading to complex kinematic solutions and deteriorating the control accuracy and stability. Typically, the roll and pitch angles are kept below 90°. Otherwise, there is a high likelihood that the driving rod will exceed the maximum stroke. When the heading angle reaches 90°, the analytical approaches for vertical positioning must guarantee that the maximum singularity-free length of the driving rod stays within a defined range relative to the median length.
When
= 90°,
= 0°,
= 0°, and
= 0 mm,
= 0 mm, the maximum and minimum lengths of the driving rods
and
are symmetrically distributed symmetrically on either side of the length of the driving rod at the neutral position of the Stewart platform.
is the displacement of the center of the moving platform along the Z-axis.
Hence, the following formula is obtained, where
is the maximum singularity-free active joint value:
In Equation (15), the value of
can be obtained.
In Equation (16),
represents a minute constant, such as 1 × 10
−9, and
is.
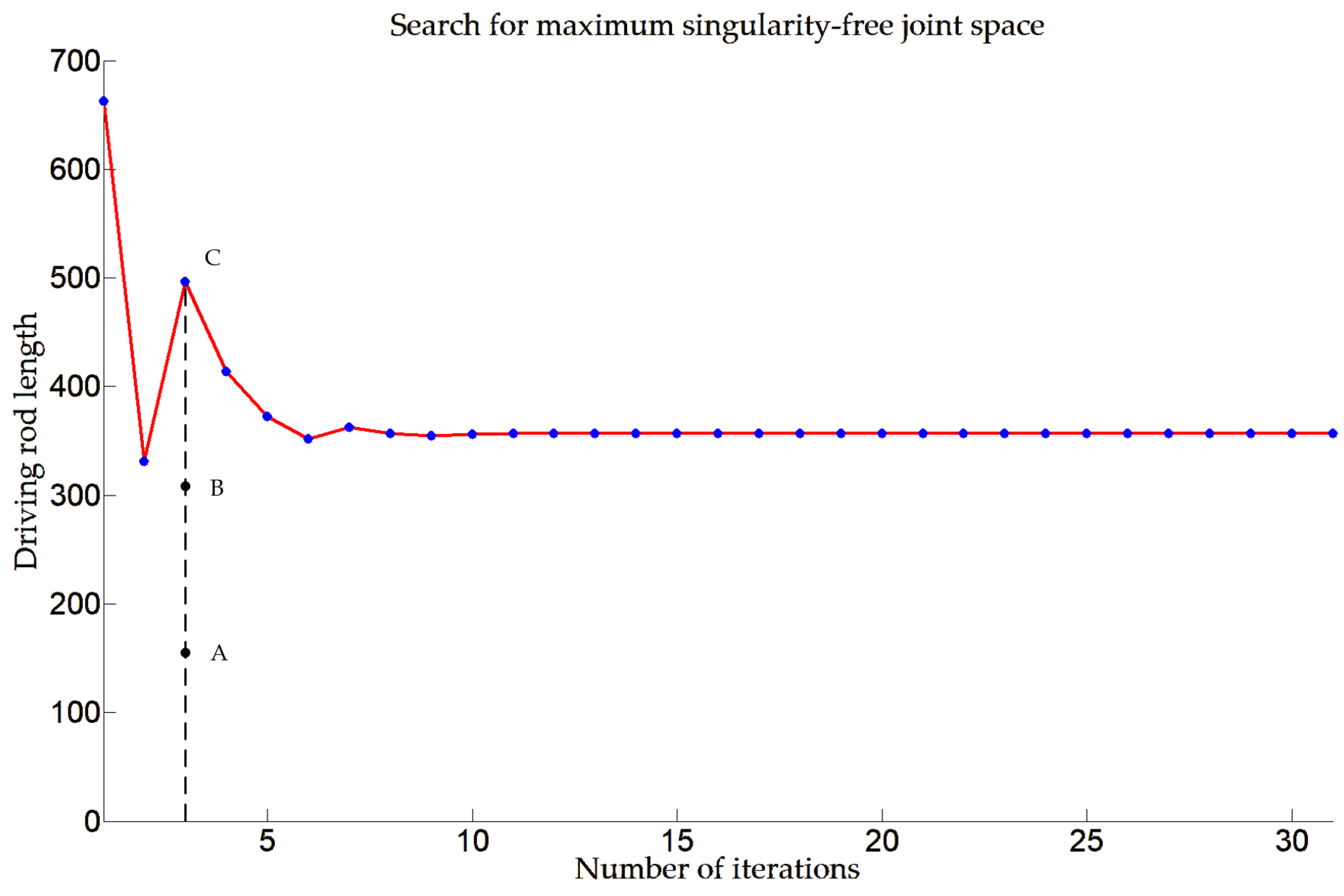
The analytical value obtained from Equation (16) acts as the initial value for the search for the maximum singularity-free active joint and is then resolved by means of the binary method. That scheme has the advantages of swift computation and precise solutions.
4.3. Jacobian Matrix Homogenization with Scaling Factor
Laryushkin et al. [
31] separate linear and angular parameters not only for the Stewart platform but for a general parallel robot. Nevertheless, in this work, it is first assumed that the elongation and shortening lengths of each active joint are symmetrically distributed on both sides of the median rod length. After obtaining the maximum singularity-free active joint space using the content in
Section 4.3 and
Section 4.4, the position and orientation in the maximum singularity-free workspace are also obtained simultaneously.
The motion of the Stewart platform includes both rotational and translational motion, so the units in the traditional Jacobian matrix are not homogeneous [
32]. To address that issue, constructing a dimensionless Jacobian matrix is essential for velocity mapping, singularity avoidance, accuracy and calibration, and dynamic performance. Although devoid of physical significance, that matrix aids in identifying singularities since the determinant becomes insensitive to the robot’s scale [
33]. Many scholars use various methods to solve the problem of dimensional inconsistency, and these methods can be broadly classified into two main categories, namely dimensional scaling methods [
34,
35,
36] and matrix separation techniques [
37].
The position and orientation of the moving platform are represented by the vector
x, and the variables of all active joints are represented by the vector
. The kinematic closed-loop equation is shown below.
Calculating the derivative of Equation (17) yields
When representing the Jacobian matrix using dual quaternions, the sizes of Jacobian matrix
and
are 8 × 8.
is divided into
and
, both of which have the size 8 × 4.
is divided into two parts, the real part
and the dual part
, both of which have the size 8 × 4.
In this chapter, the criterion for selecting the scaling factor
satisfies Equation (20) in the initial assembly configuration and consequently applies to diverse positions and orientations within the workspace. The normalization factor used in the Jacobian matrix can reduce the condition number of the Jacobian matrix, thereby enhancing the stability of the Jacobian matrix.
Due to the inconsistency between the position and orientation dimensions, the following equation is derived.
Thus, Equation (22) is obtained according to Equations (18) and (21).
Therefore, a practical approach of computing a singularity-free joint space and workspace involves detecting singularities by computing the determinant of the Jacobian matrix
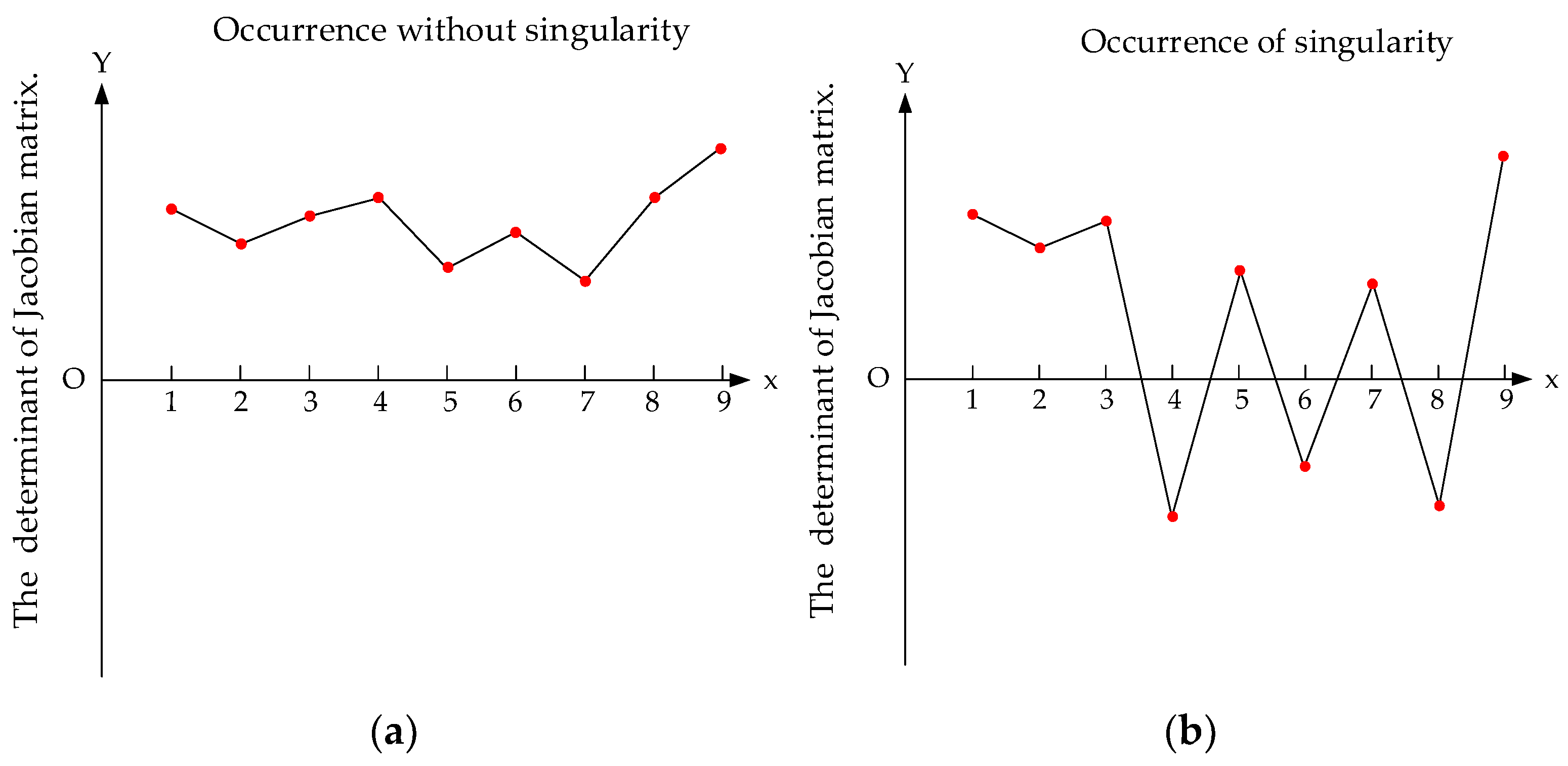
. The singularity-free workspace in this chapter is straightforward, as the fact that whether the workspace touches the singularity can be verified according to Equation (23).
is the Jacobian matrix in the initial assembly configuration of the Stewart platform, and
is in a different position and orientation. During the computation procedure, continuously monitor the sign of the determinant of the matrix. When a change in the sign of the determinant is observed, the scenario is classified as singular. Conversely, if the sign remains unchanged, the scenario is regarded as singularity-free. The schematic diagram is shown in
Figure 5.
4.4. Re-Solve Singularity-Free Space with CNN-LSTM-Attention Model
For each distinct active joint length, the forward kinematics of the 128 scenarios are computed by the Newton–Raphson method with zero-position values. When the Jacobian matrix in the Newton–Raphson method turns singular under zero-position values, causing the iteration to diverge, the CNN-LSTM-Attention model is employed to re-solve the problem using approximated values. In that case, the determinant of the Jacobian matrix is checked again for singularity, allowing for a more reliable determination of the maximum singularity-free active joint space and workspace.
When solving the forward kinematics problem of the Stewart platform, the Newton–Raphson method is superior to the homotopy continuation method, the geometric method, and other methods. The Newton–Raphson method offers a higher convergence rate. Specifically, the convergence rate is quadratic when the initial guess is from the CNN-LSTM-Attention model. The Newton–Raphson method also has lower computational complexity because it simply involves dealing with derivatives and function values. Moreover, the Newton–Raphson method is easier to implement and understand, as it is based on the intuitive Taylor expansion principle with a well-established theoretical and practical basis in relevant fields.
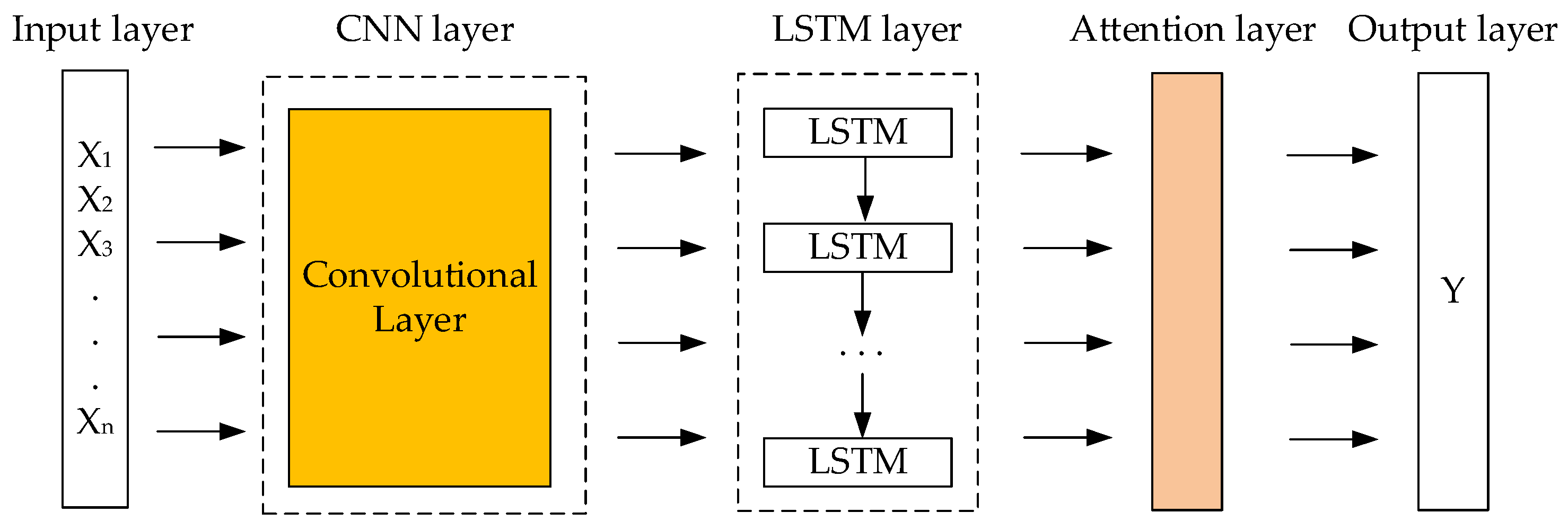
The CNN-LSTM-Attention model comprises three main components. The first component is CNN, which processes grid-structured data such as time series. The convolutional kernels of CNN slide over the data to extract features, functioning as filters for local patterns. The second component is LSTM, a specialized form of RNN meticulously designed for sequential data processing. In contrast to traditional RNNs, which encounter gradient-related challenges when dealing with long sequences, LSTM’s cell architecture adeptly mitigates these issues. LSTM can selectively govern and modulate information, thus exhibiting extraordinary proficiency in handling long-term dependencies. The third component is the Attention mechanism, which assigns weights to different input parts, enabling the model to concentrate on relevant information. By integrating the Attention mechanism with CNN and LSTM, the model’s ability to focus on crucial features within sequences or spatially structured data is significantly enhanced, thereby improving the precision-related performance.
The schematic diagram of the CNN-LSTM-Attention model is shown in
Figure 6, and different colors represent different modules.
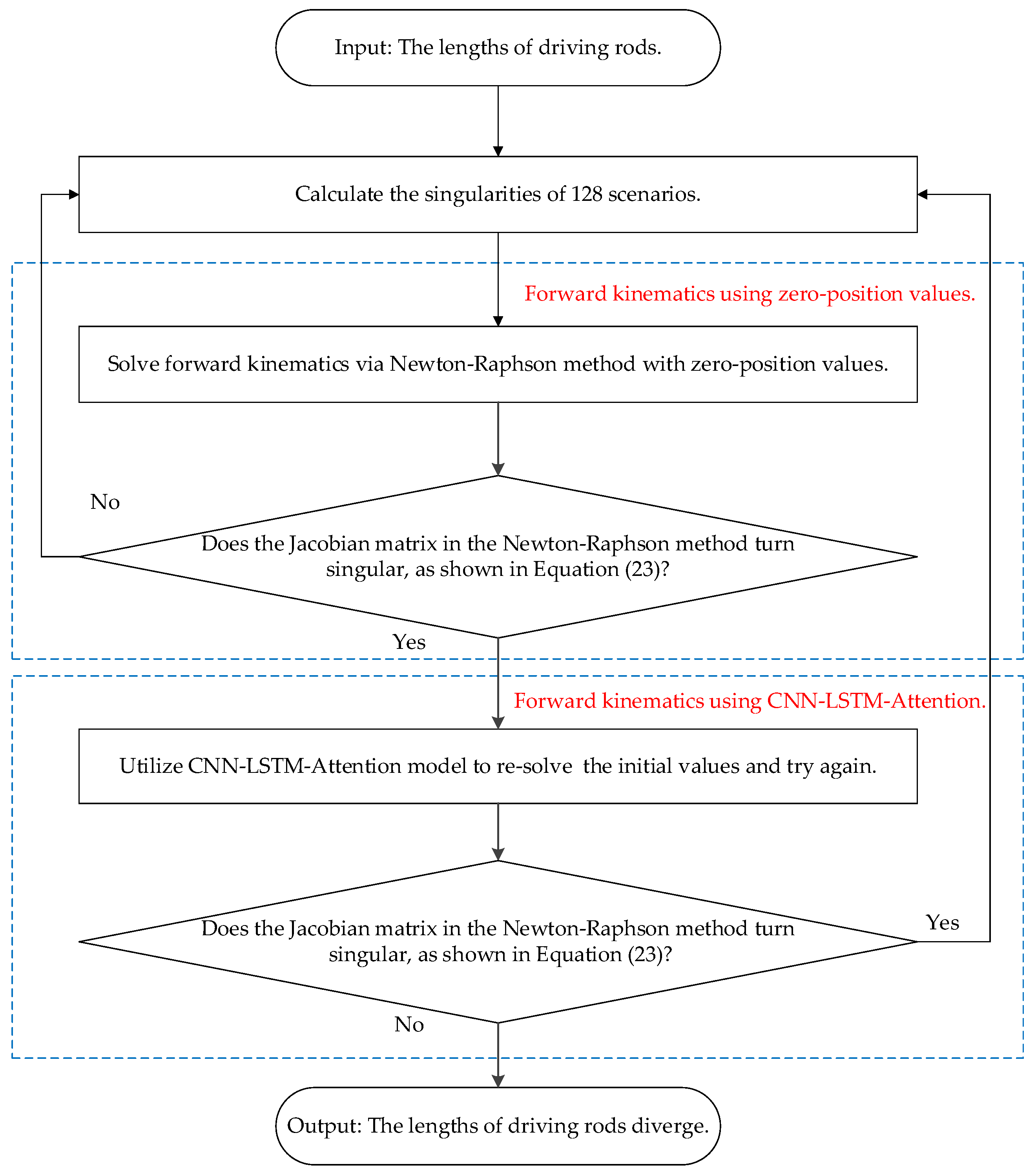
Figure 7 shows the procedure of re-solving forward kinematics with the CNN-LSTM-Attention model. In the initial stage, the forward kinematics is calculated with zero-position values. When the Jacobian matrix in the Newton–Raphson method turns singular, the CNN-LSTM-Attention model is applied for a second verification, ensuring the reliability and accuracy of the results.
6. Conclusions
To overcome the deficiencies of computational efficiency, precision, and reliability in the existing methods, this work proposes an efficient and high-precision method of calculating maximum singularity-free space in the Stewart platform based on K-Means clustering and the CNN-LSTM-Attention model. Firstly, employ the K-Means clustering and sorting method, which could improve computational efficiency during each iteration and ensure that the leading rod length combinations were more likely to converge to singularity, thereby facilitating earlier termination of the iteration and further enhancing the efficiency. Secondly, the proposed initial search aims to determine the maximum singularity-free length while avoiding gimbal lock. When gimbal lock occurs, the loss of DOFs may cause the determinant value to be zero or approach zero. The proposed method effectively reduces the search scope within the singularity-free joint space. Thirdly, the Jacobian matrix of the Stewart platform, represented in the form of dual quaternions, encompasses parameters related to both position and orientation that possess distinct dimensionalities. To address that issue, a novel dimension-scaling factor is introduced, effectively mitigating the dimensional discrepancy problem. Consequently, the newly constructed Jacobian matrix is employed to determine whether the forward kinematics associated with various sets of driving rod-length combinations are singular. Finally, a CNN-LSTM-Attention model is deployed to approximate the final result of the Newton–Raphson method, particularly when dealing with singularities in forward kinematics through the utilization of inappropriate zero-position values.
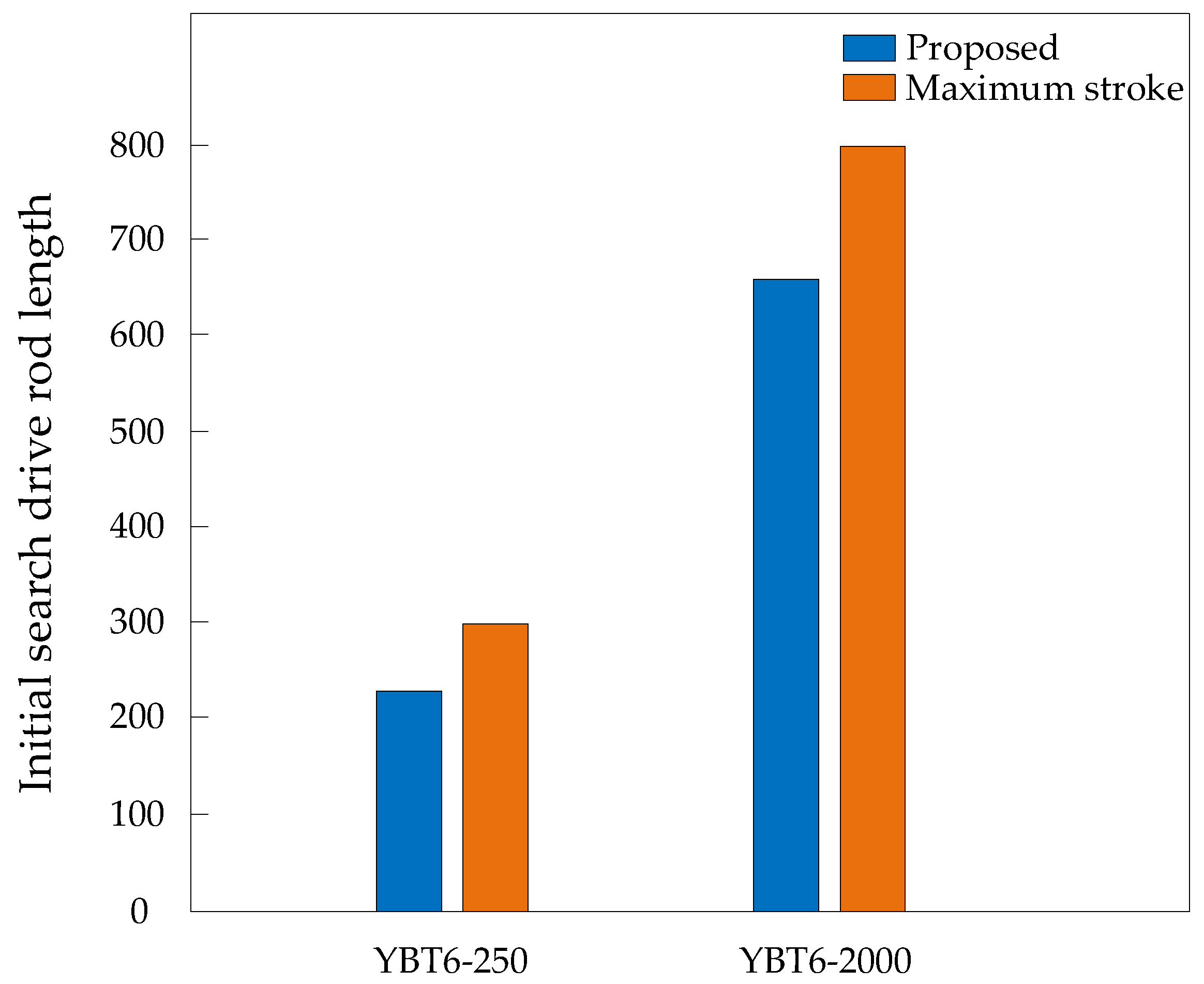
Compared with the previous algorithms for solving the singularity-free workspace, the proposed method has the following advantages. (1) The method employs the K-Means clustering and sorting approach, which not only enhances computational efficiency but also ensures the diversity of rod length combinations. Consequently, when compared with traditional discrete methods, the time complexity has been reduced to ), where and are the numbers of iterations and discrete segments, respectively. (2) The method develops an approach to initially determine the maximum singularity-free length while avoiding gimbal lock. Meanwhile, that approach reduces the searching range of the maximum singularity-free driving rod lengths, rather than searching from the driving rods’ maximum stroke. (3) The method proposes a novel scaling factor to address the issue of inconsistent dimensionalities between rotational and translational elements in the Jacobian matrix, and the newly constructed Jacobian matrix is utilized to determine singularity. (4) The proposed method utilizes a CNN-LSTM-Attention model to perform a secondary verification of the Newton–Raphson method applied in forward kinematics. When the Jacobian matrix within the Newton–Raphson turns singular under zero-position values, such verification serves to enhance the reliability of the results.
The experiments show that the proposed accelerated calculation method for the maximum singularity-free joint space and workspace of the Stewart platform is applicable to devices with diverse geometric configurations. For the two practical platforms, the computation time has been reduced by 97.54% and 80.84%, respectively, in contrast to DM-DQ and the evolutionary strategy, and the precision has been improved by 95.83% and 99.99%, respectively. Moreover, the computation time has been reduced by 98.07% and 81.80% compared with the evolutionary strategy, and the precision has been improved by 78% and 99.99%, respectively. The results disclose that the proposed method possesses advantages over DM-DQ and the evolutionary strategy.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}