1. Introduction
In engineering systems the issue of ensuring a certain motion for a specific element of a mechanical structure often arises. The problem is solved using a kinematical chain that ensures the transmission of motion from the driving element (the actuator) to the final element (the effector). The classical approach of the problem assumes the use of a typical actuator with simple motion, and then, the kinematic chain has the role of transforming the simple motion from the actuator to a complex motion required by the final element. Another manner of solving the problem consists in using a signal generator capable of ensuring the desired motion to the effector which is rigidly coupled to the actuator.
Referring to the first solution, the most difficult task is to stipulate the structure and the dimensions of the coupling kinematic chain [
1,
2]. A first imposed requirement of structural order, is to ensure to the transmission mechanism a degree of freedom equal to the number of the driving elements. In practical engineering, there are quite rare cases when a mechanism is capable of ensuring to the final element a law of motion identical to the expected one [
3].
In most situations, the obtained law of motion approximates the theoretical one with a certain error. The dimensional optimization of the mechanisms should be based on the next optimization criterion: the deviation between the actual and theoretical law of motion should be kept between pre-set limits. Unlike the dimensional optimization which is a continuous process, as Hunt [
4] mentions, the structural optimization is iterative. Thus, if a dimensional solution that ensures the optimization criteria cannot be found for an adopted structure, then, this structural solution must be aborted and a new one must be searched for.
The main objective of our work is to provide a new constructive solution, simple and robust, for coupling two shafts with crossed axes (non-co-planar) whose axes are not obliged to maintain a fixed position (the relative position of the axes may modify in time).The mechanisms with planar pairs are less used in practice [
5], mainly due to the high number of degrees of freedom (three) which must be controlled. But the application of planar pairs in the structure of a mechanism presents the advantage of the reduced costs of these pairs, due to the constructive and manufacturing simplicity and to high reliability given by the contact on large regions between the surfaces of the contacting elements [
6]. To identify a possible structural solution containing planar pairs, one should start from the mobility of a spatial mechanism, found with the following relation:
where
is the mobility, defined as the number of scalar independent parameters required to describe univocally the position of the mechanism;
is the family of the mechanism, defined as the number of common constraints imposed on all mobile elements of the mechanisms;
is the number of elements of the mechanism;
is the number of pairs of class
; the class of a kinematic pair is defined as the number of cancelled degrees of freedom for one element of the pair when the other element is considered immobile; the class can take values between 1 and 5.
The employment of Equation (1) allows for finding the structure of a mechanism when certain (different) structural conditions are imposed. As an example, let us consider that a structural solution that permits the transmission of motion between two shafts with crossed axes by direct contact, as in
Figure 1, is sought.
To apply the Equation (1), it is accepted a priori that the situation of the most general case of spatial mechanism (as a consequence,
) exists [
7], that is, the mobility of the mechanisms should be
, meaning that a single driving element exists. The mechanism has
elements: the mobile elements 1 and 2 are linked to the ground by revolute pairs
A and
B, of the fifth class and between these two elements is formed a pair of class
that supresses
x degrees of freedom of the mechanism [
8]. Equation (1) becomes:
Equation (3) has a unique solution:
Equation (4) shows that the single possible structural solution for transmission of motion between two shafts with crossed axes is represented by the construction of a pairs of class 1 between the two shafts. As examples of such mechanisms one may remind: of the spatial cam mechanisms [
9], and the gear mechanisms with crossed axes, either with helical gears or with hypoid gears [
10,
11].
The challenge of introducing into the structure of the mechanism another pair, and not the class 1 pair, conducts to values of the mobility , and thus the mechanism is blocked. As a consequence, the transmission of motion between the two kinematic elements cannot be obtained via a planar pair.
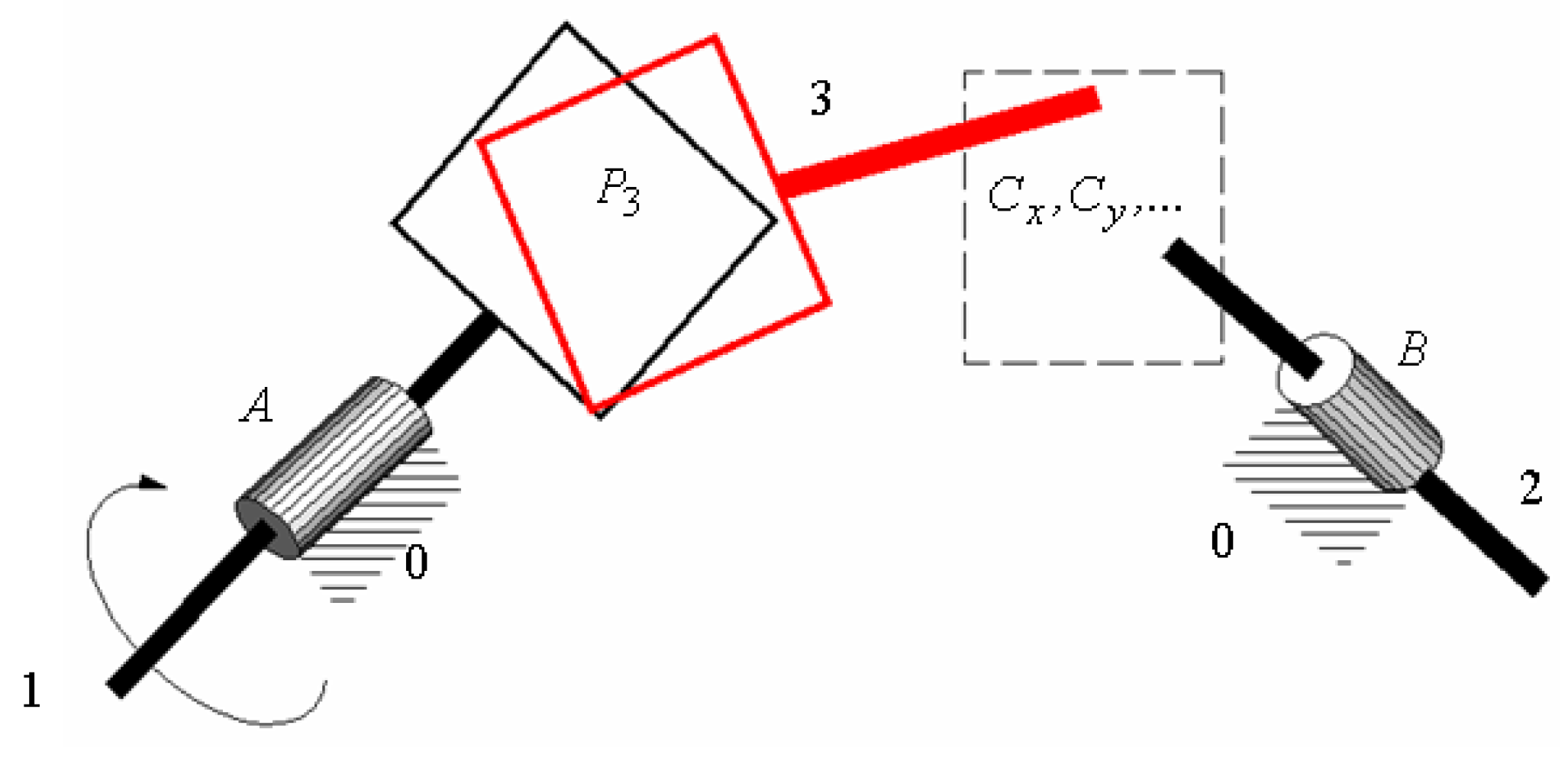
A structural solution is aimed at, to transmit the motion between the two shafts using intermediate element 3; see
Figure 2.
To be remarked that for parallelism between driving and driven axes, the coupling can be substituted by a Schmidt coupling [
12], or for concurrent axes, the coupling can be replaced by a Cardan joint [
13], or conical gear mechanisms. The present coupling is superior to the ones mentioned from the point of view of the transmission ratio since, unlike the Cardan joint which has a variable transmission ratio, it is a homokinetic one, as will be shown. A mechanical transmission which allows for transmission of rotation motion with a constant ratio between concurrent axes is the Rzeppa joint [
14]. As can be noticed, in order to replace the sliding friction with the rolling friction, the spherical bodies are moving in toroidal channels made on the surfaces of the two shafts, a fact that results in unusual manufacturing difficulties. Concerning the helical gear mechanisms (and also the Rzeppa joints), they have the kinematic advantage with respect to the proposed solution of a rigorously constant transmission ratio, but present as a disadvantage the necessity of ensuring a very well controlled relative position of the axes, and that the axes should be fixed. Additionally, the contact between the teeth of gear mechanisms is of the Hertz type, characterised by important contact surface stresses while for the proposed solution, all contacts are of the surface type (conformal), with the possibility of adopting from the design phase the dimensions of the contact regions in order to limit the values of contact pressures.
Equation (1) takes the form
,
, the pairs
A and
B remain of the fifth class and a planar pair of class 3 (
) is formed between the elements 1 and 2, and thus, the intermediate element 3 will form other pairs of class
,
...., with the rest of the elements; see
Figure 2. Here, the intuitive notation P for the planar pair was used, though other notations exist in the literature [
15]; and to avoid confusions, recent works do not practice such literal symbolization [
16].
In this case, Equation (1) becomes
and conducts to:
Equation (6) shows that the rest of the pairs possibly formed by the intermediate element can be of class maximum 4, and there are several possible structural solutions. When a minimum number of pairs is desired, the single probable structural solution is
,
and corresponds to the case when the intermediate element forms with the other mobile element a class four cylindrical pair [
17]. The obtained mechanism, RPCR, presented in
Figure 3 is detailed constructively and kinematical analysed in [
18]. The demand of obtaining a mechanism with symmetrical structure of the
type result in the following particular form of Equation (1):
that has the solution
x = 1; see example in
Figure 4. Therefore, if the mechanism contains two revolute pairs and two planar pairs, the existence of an additional class 1 pairs is necessary for obtaining a well determined motion. The condition of having structural symmetry of the mechanism is related to the idea that the single viable solution is that this class 1 pair should be formed either between the driven and driving element, or between the intermediate element and the ground.
The constructive solution of the last variant is presented in [
19]. As can be observed from
Figure 5, the application of the class 1 pair is not simple; the constructive solution of transmission becomes complex and, furthermore, the concentrated contact will induce significant contact stresses.
So, the conclusion of avoiding higher pairs in the structure of the kinematic chain emerges and leads to the idea of using as coupling solution a kinematic chain formed by two elements, 2 and 4, that form between them a planar pair of class
and also, form a mechanism with symmetric structure. The structural symmetry condition is related to the requirement that the elements of the intermediate coupling chain form with each of the driving and driven elements a pair of the same class
. For this case, in Equation (1),
elements; two revolute pairs of class 5,
A and
B; a planar pair
of class 3; two pairs
of the same class
x as in
Figure 6.
The mobility of the mechanism remains the same:
In conclusion, the unknown pairs have to be of class 5 (revolute, translation or helical). From these three variants, the revolute pair was the option since it can be materialized by rolling bearings. Additionally, one can remark that for the crossed axes, both the double Cardan joint and the present mechanism, the sliding friction was not avoided, in the prismatic pair and in the planar pair, respectively. Another solution that can be applied for the transmission of rotation motion with a constant ratio, between crossed axes, is represented by the mechanism with tripodic [
20] or bipodic contact. This results, with the exception of the planar pair, in all other pairs of the mechanism, the rolling friction is ensured, a fact that provides higher efficiency [
21]. It must be mentioned that the correct running of the mechanism requires that the revolution axes
Δ′ and
Δ″ of the new formed revolute pairs not be parallel to
, the normal to the contact plane of the planar pair; see
Figure 7. If this condition is not obeyed, an uncontrolled revolute motion could appear in the intermediate revolute pair which links the element of the planar pair to the input element and to the output element, respectively.
3. Results and Discussions
As shown in the previous paragraph, the mechanism has a symmetrical structure with respect to the ground. The constructive parameters of the mechanism are as follows: the angle between the input and output axes, and , respectively; the length of the common normal of these axes and and , the lengths of common normals of axes and , and, and respectively.
The process of design and optimization of the mechanism involves only the parameters and because the values of the parameters and , characterizing the relative position between the in and out axes imposed by the project thematic.
The design and optimization of the mechanism should consider two aspects:
Ensuring a transmission ratio which varies between pre-set limits;
Design of the pair capable to ensure a minimum contact zone able to transmit the torques corresponding to adequate operating and to avoid the interference between the two elements of the planar pair.
A constructive sketch of the mechanism is presented in
Figure 24. The contacting regions which form the higher pair have rectangular shape. A good transmission of the forces between the elements requires finding the traces described by the straight lines
Δ3 and
Δ4 in the common contact plane.
Assuming that the contact zones from both elements of the higher pair have rectangular shapes and equal dimensions, using the simulation software, the geometrical loci described by the two straight lines
Δ3 and
Δ4 were found, as presented in
Figure 24.
The trajectories from
Figure 25 were obtained for the next values of the following parameters:
;
;
, where
and
are the dimensions of the active rectangular zone. Applying relations (56) and (60), the analytical traces of the two straight lines in the common contact plane were obtained; the results are represented in
Figure 26; the difference between the traces can be noticed, and for both lines, during operation, there will exist regions of the traces situated outside the rectangular zone (plotted with black line). The calculus was repeated for other parameters,
and the traces from
Figure 27 were obtained, from which it is remarked that the two traces are identical in shape and position but are situated outside the rectangular region. Thus, a geometrical symmetry will be recommended, because, when suitable dimensions are ensured for one trace, the other trace will have the same dimensions. A second conclusion emerging from here is that for equal values of the parameters
and
, there is the risk that the traces are positioned outside the zones assumed for contact.
From
Figure 26 and
Figure 27 show the major significance of the parameter
upon the dimensions of the contact region from the planar pair.
In order to evaluate the effect of the three constructive paraments
, and
upon the transmission ratio
of the mechanism, an analytical expression of the ratio is necessary. According to the definition relation:
Analysing relations (46) which give the displacements from the revolute pairs as functions of the angle of the driving element, one can remark that the angle depends on the angle both directly and via the angle . Considering that, for the calculus of the transmission ratio it is necessary for the derivative of with respect to and the derivatives of the angles and to conduct to the same continuous functions no matter if expressed by Equations (45) or (46), relations (45) will be used for the angles and because they contain inverse trigonometric functions of a single argument.
The expression of
can be written as
This expression is introduced into the second Equation (45) and after calculus, it results in the following:
The transmission ratio can be expressed only as a function of the angle
by the simple relation
Relation (64) allows for the study of the influence of the three constructive parameters upon the transmission ratio. Analysing relation (64), the main strong points of the present coupling solution are highlighted:
The possibility of transmission of rotation motion between two crossed shafts with variable relative position
For the particular cases
, the axes of the shafts are parallel and the transmission ratio is
; the coupling becomes a CV (constant velocity) joint and can replace an Oldham or Schmidt joint [
31].
For the case , the ratio is also and the coupling can replace a conical gear mechanism or a Rzeppa joint.
Comparing the constructive solution of the present coupling to the ones mentioned, we can say the following:
- –
The present joint has fewer elements, compared to Rzeppa and Schmidt joints.
- –
Elementary boundary surfaces (cylinder or plane), compared to the Rzeppa joint, which has spherical and toroidal surfaces or compared to conical gear, which has conical flank involute surfaces.
Based on a simpler constructive solution, the manufacturing method is simpler, precise and economical.
The effect of parameters
,
şi
is highlighted in
Figure 28,
Figure 29 and
Figure 30. For each of these parameters, a string of values was considered, between a minimum and maximum value, and the curve representing the dependence of the transmission ratio with respect to the angle of the driving element was traced. The curve corresponding to the minimum value was traced with blue, the one for the maximum value was black, and for the intermediate values the traces were red. As expected, the effect of increasing the parameters
and
was an enlargement of the interval of variation in the transmission ratio, a fact confirmed by the plots from
Figure 28 and
Figure 29.
Concerning the effect of parameter
(common value of
and
), it is remarked that for increased values of this parameter, the interval of variation in the transmission ratio narrows, as in
Figure 30, and from here the conclusion is that for a range of variation in the transmission ratio, a value
can be found, thus ensuring that the transmission ratio is within the imposed interval.
In order to obtain the value of
, the expression of the maximum and minimum values of the transmission ratio is required. To this end, the derivative of
is calculated:
The solutions of the equation:
are:
and correspond to the positions of the driving element,
, for the extreme values of the transmission ratio. The values obtained in relation (67) are replaced in relation (64) and the two extreme values are obtained, expressed with the aid of the function:
The goal is that the value of the transmission ratio is as close as possible to
. Therefore, if it is obligatory for the transmission ratio to be maintained within the interval
, where the deviation
is imposed, the transcendent equation must be solved:
Adopting for the parameter
the value
, the maximum value between
and
, the transmission ratio will be inside the interval
. The solving of the equations (70) is represented in
Figure 31 where it is remarked that for values greater than
, the extreme values are contained in above mentioned interval.
Once the minimum value
of the common normal between the in/out axes and the rotation axes of intermediate pairs is found, one can proceed to adopt the final value of this parameter, and thus, the minimum contact surface between the elements of the planar pair is guaranteed, and the interference is avoided. As mentioned, the available regions for the contact between the elements of the planar pair were chosen to be rectangular and of the same dimension,
. Adopting a common value for the two parameters
and
confirms the reversibility of the planar pair (the relative motion of an element with respect to the other is identical, when the roles of the two elements would be reversed). To reveal the zone occupied by one of the elements of the planar pair with respect to the other one, it is considered that both contact zones are rectangular, as in
Figure 32, and using the Equations (45) and (46) the traces of one rectangle versus the second rectangle were found; in
Figure 33, these traces for different values of the
parameter are presented. In
Figure 33a, the risk of non-contact exists, while in
Figure 33d, the interference may occur. Therefore, the domain for
can be adopted to avoid the extreme situations mentioned.
In
Figure 34 is presented the actual symmetrical RRPRR mechanisms, designed and manufactured according to the results obtained from analytical calculus and applying the geometrical optimization considerations. The prototype we fabricated confirmed the possibility of transmitting the rotation motion between two shafts with crossed axes with variable position and also, the fact that the presence of the planar pair ensures a silent operation of the transmission. The simple surfaces (plane and cylinder) that border the elements ensure good manufacturing technology and all the elements can be manufactured on universal machine tools, a fact that leads to a low transmission cost price.
The dynamic and energy aspects of the operation of the proposed transmission are goals for future work. It is obvious that the major problem consists in the study of the phenomena occurring in the planar pair, where the sliding friction must be accepted (similar to accepting sliding friction on cam mechanisms with a flat face follower or in the gear mechanisms). We believe it is important that the obtained relations allow finding the relative motions between any of the surfaces of the pairs from the structure of the mechanism, which is essential in the estimation of normal reactions and implicitly in friction forces which in the end, are decisive in the calculus of wear and efficiency.
4. Conclusions
This paper presents a new coupling solution, which contains in the structure a planar pair, for transmitting the rotation motion between two shafts with crossed axes. The presence of the planar joint is founded on structural considerations. The planar pair has a high degree of possibilities of motion and then conducts to structural solutions that have lesser elements compared to the classical solutions which contain in their structure a cylindrical, revolute of translational pairs. The first solution possible from structural considerations must have at least an intermediate element with the role of connecting the input and output shafts through at least one planar pair.
The constructive solutions presented in previous works specify difficulties of manufacturing and constructive motives. From these reasons, we aimed at a structural solution by which, the two shafts, input and output, are coupled via a kinematic linkage made between two elements, which contain a planar joint. Accepting that the planar pair should be formed between the elements of the intermediate chain, it is shown that the pairs between it and the elements linked to the ground (the driven and driving ones) can be only rotational, and thus the mechanism is a structurally symmetric of the RRPRR type. The structural symmetry simplifies substantially the construction of the mechanism. The constructive parameters of the mechanism are the angle and distance between the driving and driven shaft and also the length of the common normal between the axes of in and out pairs, and the axes of the revolute pairs of the coupling chain, respectively.
Due to the presence of the planar pair, the mechanisms cannot be placed in the category of Hartenberg–Denavit mechanisms, for which the motion from any pair has a well-stipulated axis, and thus, the method of homogenous operators is not applicable.
The kinematic analysis of the mechanism for a specified motion of the driving element supposes the completion of two steps: finding the relative motions from the revolute pairs and then, finding the motions from the planar pair.
In order to determine the motions from revolute pairs, the geometrical conditions of planar pair creation were expressed in vector form in the coordinate frame of the ground. Homogenous operators were used for expressing all the elements occurring in the equations of constraint of the planar pair. Three scalar equations were obtained which allowed for finding the motions from the revolute pairs as a function of the motion of the driving element. The motion from the exit pair is a rotatory motion, while in the inner revolute pairs, the motions are oscillations.
For finding the motions from the planar pair, the revolute motion was first determined, and it was also of the oscillatory type; and after that, the motion from the contact plane, for a point belonging to an element of the planar pair with respect to the other element was found. It was observed that by interchanging the elements of the planar pair, a different motion was obtained. By equalising the values of the constructive parameters corresponding to the positions of the inner revolute pairs with respect to the in and out positions, it is remarked that the two motions from the planar pair became identical and the pair had a reversible character. In this particular situation, the relations characteristic to the motions from kinematical pairs were substantially reduced.
From a technical point of view, an extremely important problem is the adoption of the dimensions of the elements of the planar pair. Assuming a symmetrical geometric mechanism, it is shown with that the selection of the distance between the axes of outer and inner pairs with values greater than a minimum value, the transmission ratio of the mechanism can be maintained within a pre-defined variation interval.
Supposing that the possible contact surfaces from the planar pair are two identical rectangles, the geometrical locus described by one of these rectangles with respect to the other, was found. The result allows for adopting the constrictive parameter such as to avoid the interference between the elements of the planar pair, on one side, and to ensure a minimum contact region capable of adequately transmitting the forces from the elements of the pair, on the other side.
As a final conclusion, this paper presents anew constructive solution, simple and robust for the transmission of motion between two shafts with crossed axes. For future work, concerning the pairs of the mechanism, the problem of optimization from a tribological point of view is envisaged—the employment of rolling bearings for revolute pairs and the use of a pair of materials with antifriction properties for the elements of the planar pair, with the target of a higher transmission efficiency.


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}