1. Introduction
With the rapid iteration of autonomous driving, the demands for the precise control, functional integration, and shared hardware of vehicles have garnered significant attention in wire-controlled chassis [
1]. Brake-by-wire (BBW) stands out as a crucial subsystem for driving safety, making it an indispensable way to facilitate advanced autonomous driving.
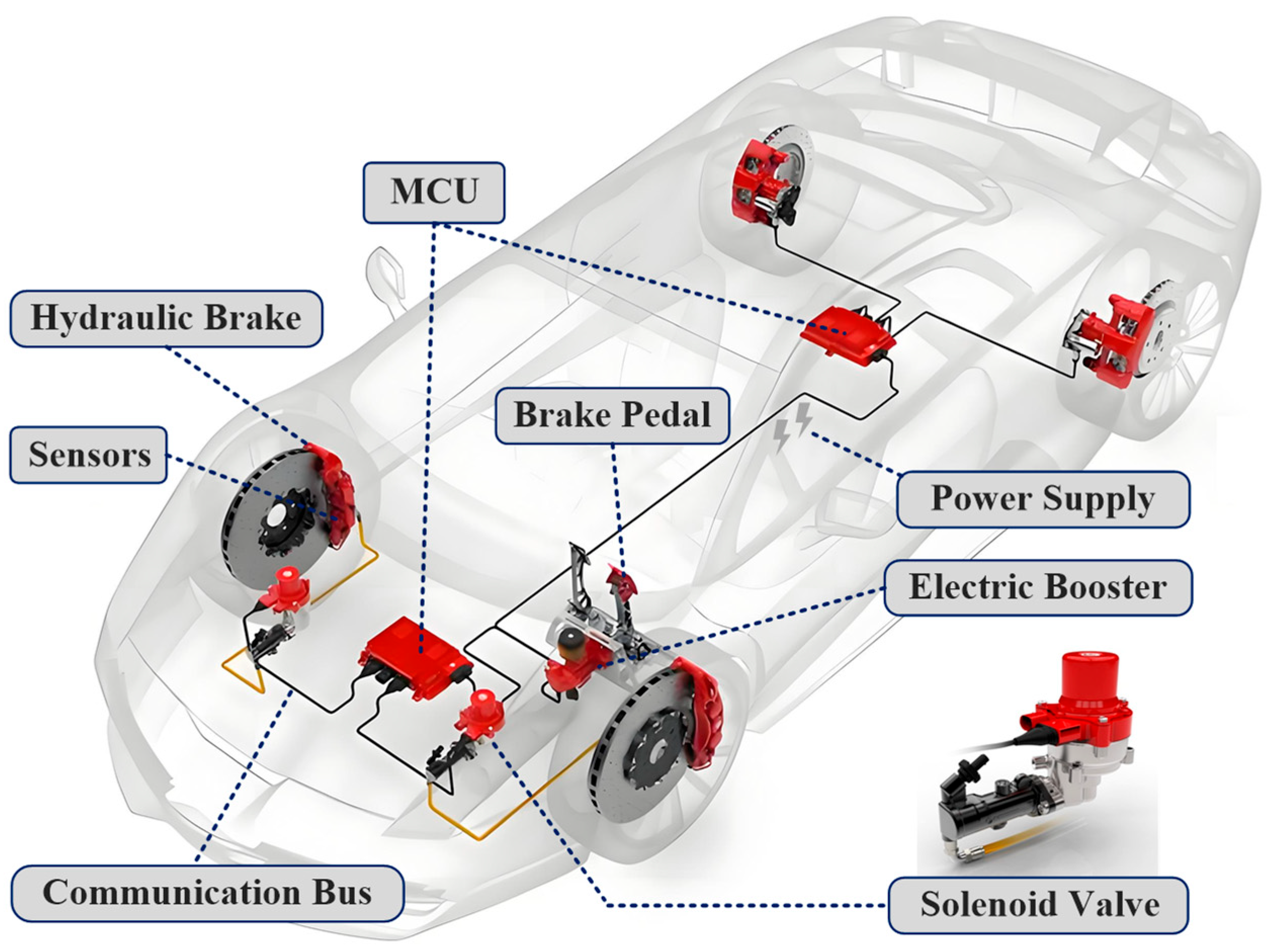
BBW systems can be categorized into two main types based on their structural scheme: electro-hydraulic brake (EHB) systems and electro-mechanical brake (EMB) systems. EHB systems are generally composed of main control units (MCUs), a hydraulic control unit (HCU, including hydraulic brakes, ABS/ESC solenoid valve modules, and electric boosters), sensors, power supplies, and communication buses, which are illustrated in
Figure 1 [
2]. The braking process is controlled by the MCU, which receives electrical signals from the brake pedal, interprets the driver’s braking commands, and directs the HCU accordingly.
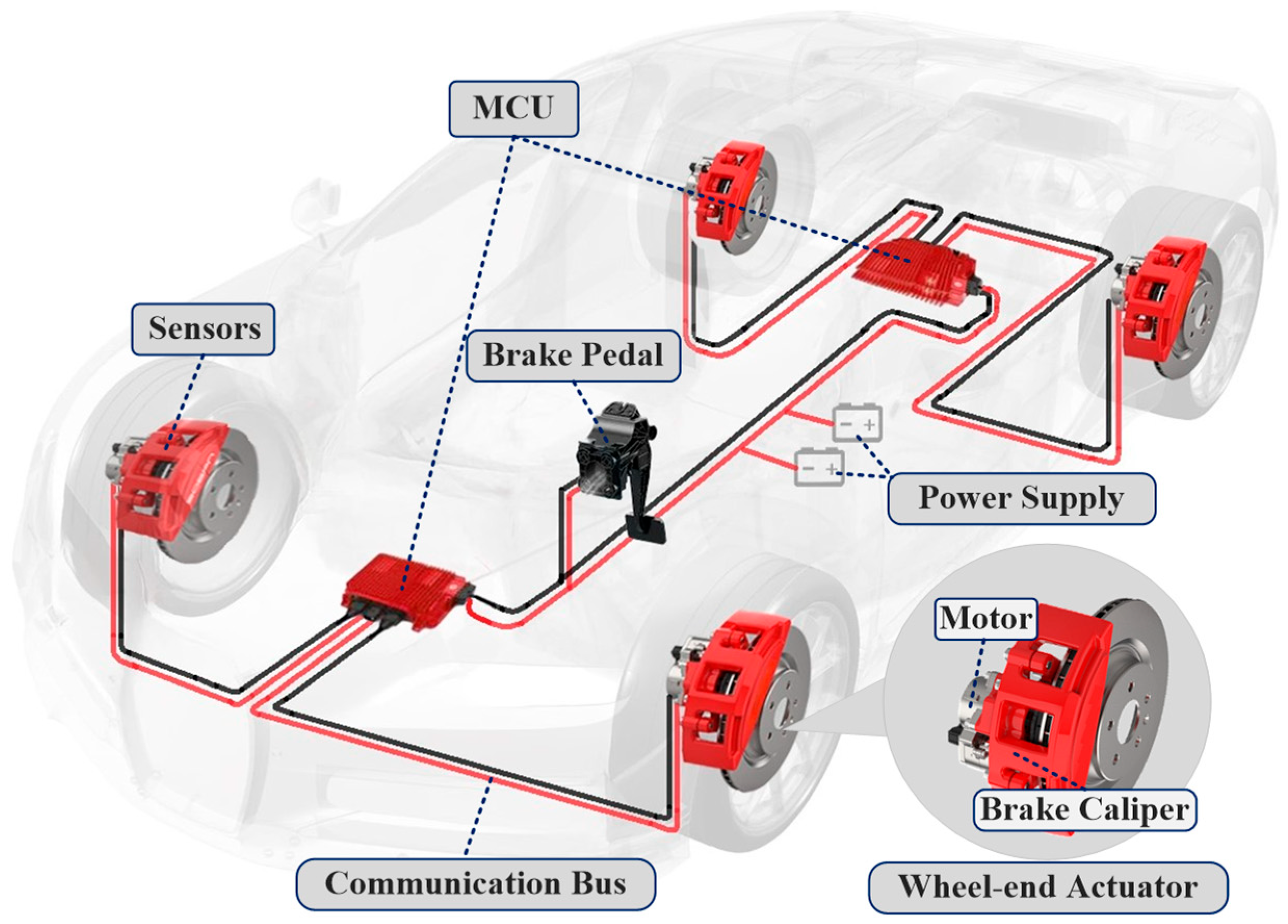
EMB systems generally comprise five principal components: MCUs, wheel-end actuators (WEAs), sensors, power supplies, and communication buses, which are illustrated in
Figure 2 [
3]. EMB systems rely on electro-mechanical integrated actuators installed at the wheel end to replace hydraulic calipers and provide a braking force. Hence, the complex hydraulic components between the brake pedal and the brake actuators are eliminated, with the WEAs being controlled through electrical signals instead of hydraulic pressure. Furthermore, a distributed braking system is constructed by integrating each WEA into a WEA matrix, thereby facilitating easier and more flexible integrated chassis control. Consequently, EMB systems are widely recognized as the most promising braking system for intelligent electric vehicles.
In contrast, technical schemes of EHB systems are relatively mature. The braking safety control (BSC) system introduced by BYD and the NBooster system developed by NASN both maintain a backup mode with pure mechanical connections and integrate external redundancies, including power and communication backups. These enhancements ensure that EHB systems fully meet the requirements of Level 2 of autonomous driving.
As for EMB systems, they are currently in the vehicle testing phase, with promising advancements indicating a strong potential for future mass production. In June 2022, Jiongyi Electronic Technology released the intelligent drive-by-wire chassis with a self-developed EMB system for automatic driving and claimed to achieve mass production in 2025 [
4]. EMB systems eliminate mechanical backups and introduce redundancies such as controller and actuator backups, aiming to meet the requirements of Level 3 and higher levels of autonomous driving. Due to the absence of mechanical connections between the brake pedal and the WEA, any component fault within the EMB systems presents a potential failure risk. This failure is manifested through the actuator’s inability to respond to brake commands promptly and accurately, leading to issues such as loss of braking, unintended braking, braking deviation, and braking skidding or even drifting. These issues severely endanger driving safety. Therefore, the functional safety challenges faced by EMB systems are the primary bottleneck restricting their large-scale application.
Functional safety issues refer to the system’s inability to perform its functions correctly due to faults, which can lead to potential safety risks [
5]. These faults may occur intermittently or permanently throughout the system lifecycle and can result in equipment damage, personal injury, or even life-threatening situations. Therefore, it is essential to ensure the system can still operate safely or enter a safe mode after failures to prevent harm. To ensure the functional safety of electrical and electronic (E/E) systems for road vehicles, the international organization standardization (ISO) has issued the ISO 26262 standard. The standard provides a reliable functional safety development process that spans the entire lifecycle of vehicles. The process starts with the concept development and progresses through system, hardware, and software developments, ultimately leading to verification and validation [
5,
6,
7,
8,
9,
10].
Since the standard release, scholars and enterprises have conducted related studies following the outlined processes. Regarding the definition of functional safety concepts, Fang Y. et al. [
2] defined the functional safety concept for BBW systems, designed an EHB system hardware architecture with three redundant lines, and verified its reliability to meet functional safety requirements. Li C. et al. [
11] defined a functional safety-compliant BBW system architecture and conducted a detailed analysis of its requirements. Chen Yang, et al. [
12] defined the E/E architecture of a road traffic light system based on ISO 26262 and established the functional safety goals for this system. For the EMB system architecture, Li J. et al. [
13] provided a hardware structure and designed a braking force control strategy for EMB systems based on the Fuzzy PID algorithm. Li C. et al. [
4] summarized the configurations and typical EMB architectures, highlighting the characteristics of the schemes. Li Y. et al. [
14] designed an EMB system architecture, allocating a monitoring strategy of three-layer control model for the architecture and conducted hardware-in-the-loop (HIL) tests for verification. For the system architecture analysis, Soltanali H. et al. [
15] analyzed the safety of intelligent braking systems and explored the potential hazards of system functions with a fuzzy fault tree and Bayesian network model. Famfulik J. et al. [
16] proposed a model of system architecture reliability calculation and validated this model through simulations and tests. For the system architecture verification, Wu X. et al. [
17] studied the failure modes of a BBW system based on fault tree analysis (FTA) and designed hardware redundancy measures. Chao Huang, et al. [
18] designed the hardware architecture of a steer-by-wire system (SBWs) based on functional safety concepts and conducted analyses using state transition diagrams and the FTA. Through literature research, it was found that previous studies on EMB system architecture have made remarkable progress in technical safety requirements (TSR) analyses, but there is a lack of study on the interdependencies of each component, especially of the WEA, which can affect the definition of EMB system failure. Hence, it is necessary to further explore fundamental events leading to EMB system failure, thereby providing critical data support for the functional safety verification of EMB systems.
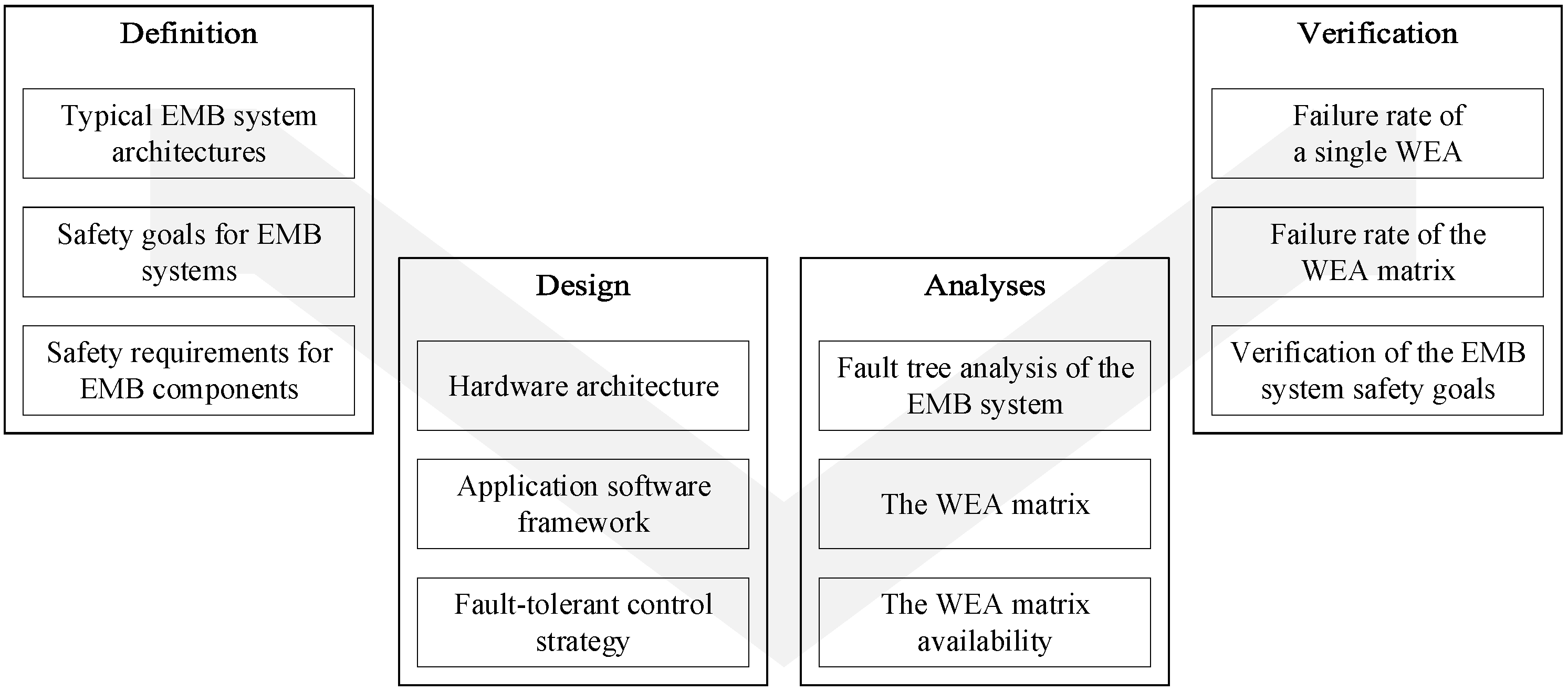
To solve these issues, this study proposes an EMB system architecture, further analyzing and validating the architecture based on functional safety methods, as shown in
Figure 3. Specifically, typical EMB system architectures are investigated. Safety goals (SGs) for EMB systems are set and the TSR for components are assigned. Second, an EMB system hardware architecture satisfying the TSR is proposed. Then, the hardware architecture and application software framework are analyzed, and the fault-tolerance control strategy is established for further analyses. On these bases, the top events leading to EMB failure are analyzed, the WEA matrix operating states are evaluated, and the WEA matrix availabilities are determined. Finally, the EMB system architecture is verified.
The main contribution of this study is to propose a method for calculating the failure rate of WEA matrix based on Markov chain (MC) and fault-tolerant control (FTC) strategy. Firstly, the failure rate of a single WEA was calculated based on the FTA method. Secondly, a MC is established, and the operating states of the WEA matrix are further analyzed. On this basis, the FTC strategy is built, and experiments are carried out under WEA failure modes. Thus, the unavailable states of the WEA matrix are determined by comparing the experimental results with the SGs. Finally, the failure rate of the WEA matrix is obtained. Hence, the above detailed analyses facilitate the precise calculation of the EMB system failure probability and the functional safety assessments.
The remaining sections of this study are organized as follows:
Section 2 presents a preliminary discussion on the typical EMB system architecture, defining the concept of EMB systems.
Section 3 designs the hardware architecture, application software framework and control strategy of EMB systems.
Section 4 provides detailed analyses of the EMB system architecture and the WEA matrix.
Section 5 verifies that the proposed EMB system architecture satisfies the SGs.
Section 6 concludes this study.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}