
A Non-Linear Offset-Free Model Predictive Control Design Approach

Abstract
1. Introduction
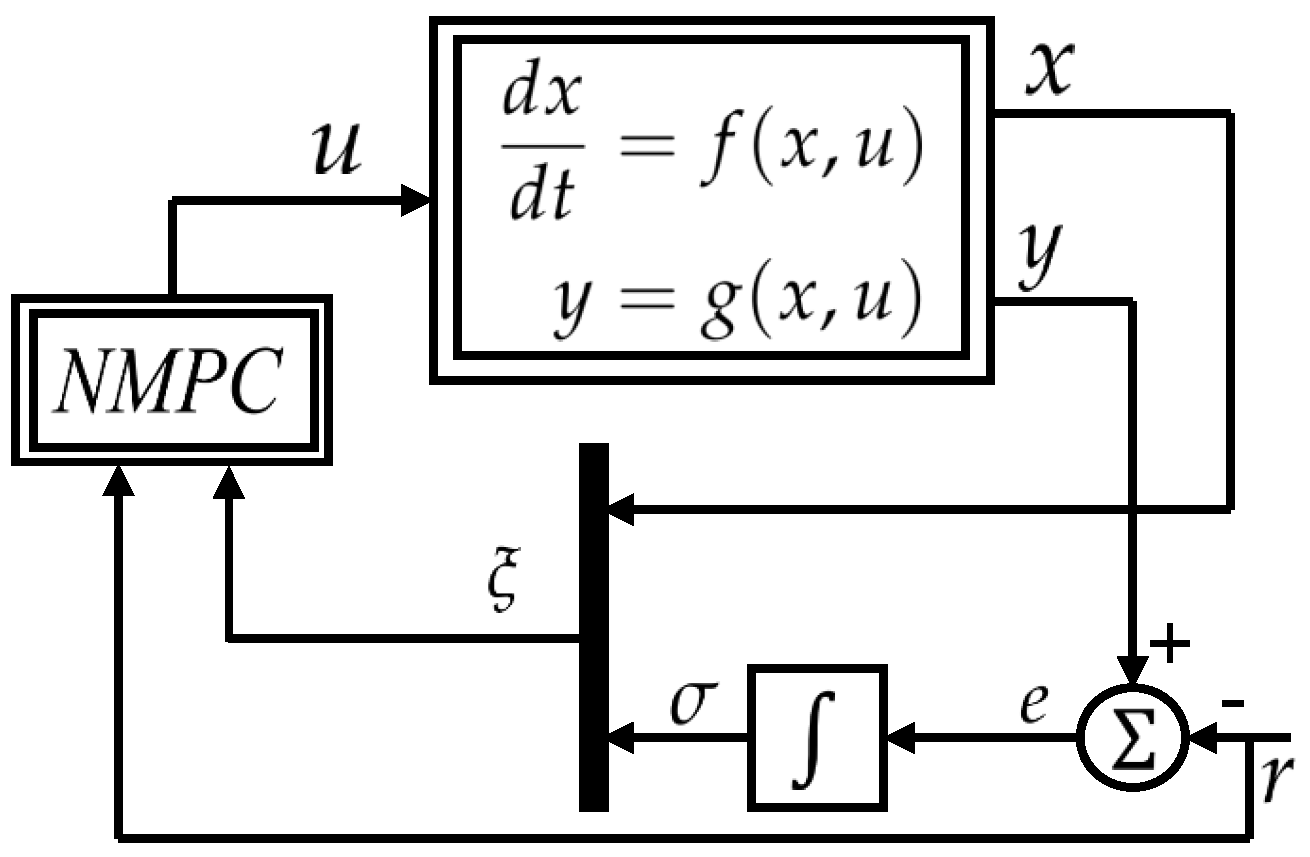
2. Integral Model Predictive Control
2.1. Problem Formulation
2.2. Stability
2.3. Non-Linear Model Predictive Control Algorithm
3. The Coupled Water Tank System
3.1. The Water Tank Model
3.2. Parameters and Uncertainties
3.3. Constraints
3.4. The Jacobian Matrix
3.5. Tuning and Simulation Results
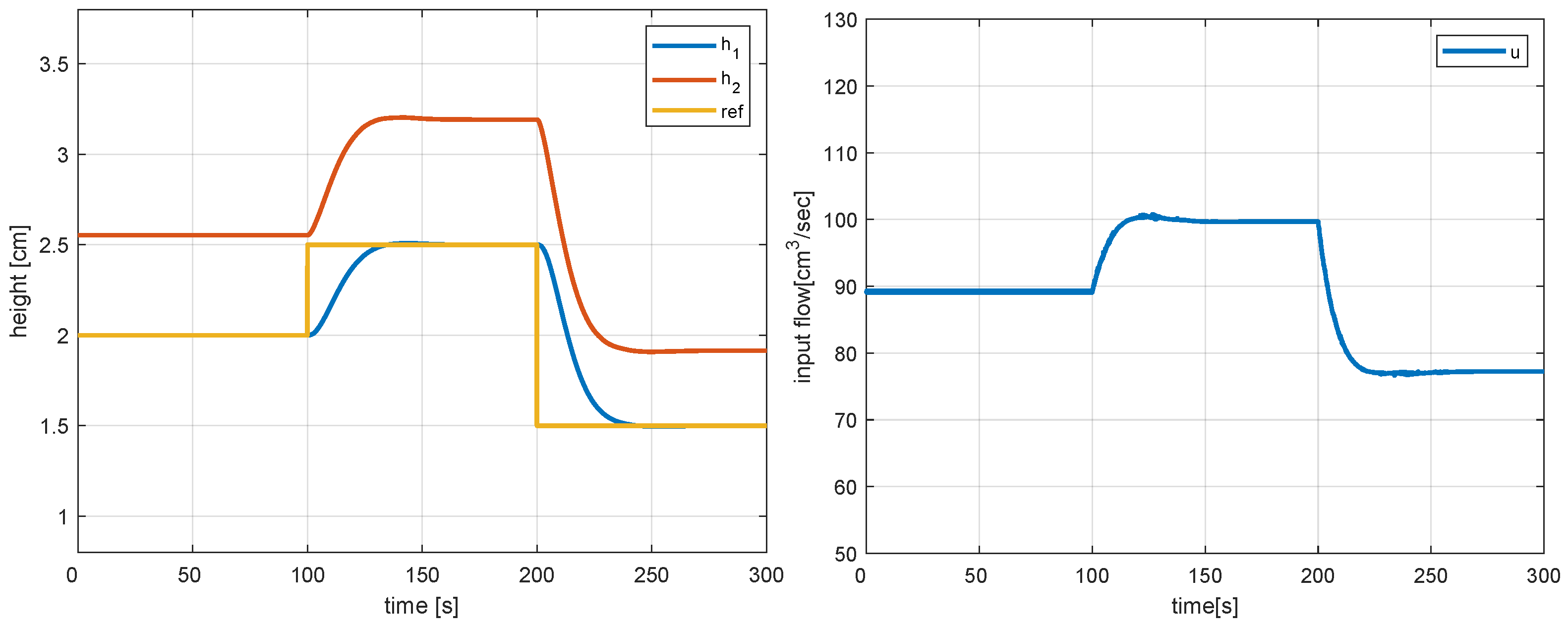
3.5.1. Simulation Results for the Nominal Plant
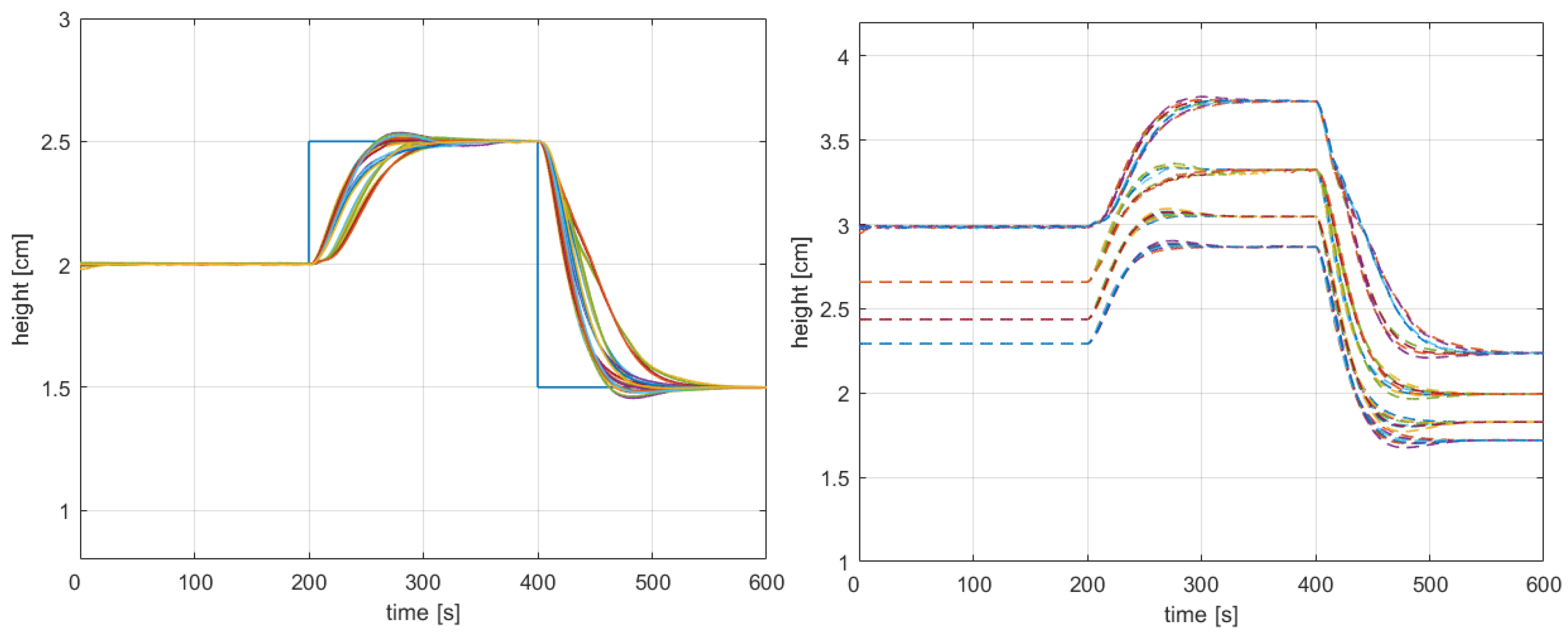
3.5.2. Simulation Results for the Uncertain Plant
3.6. Real-Time Application
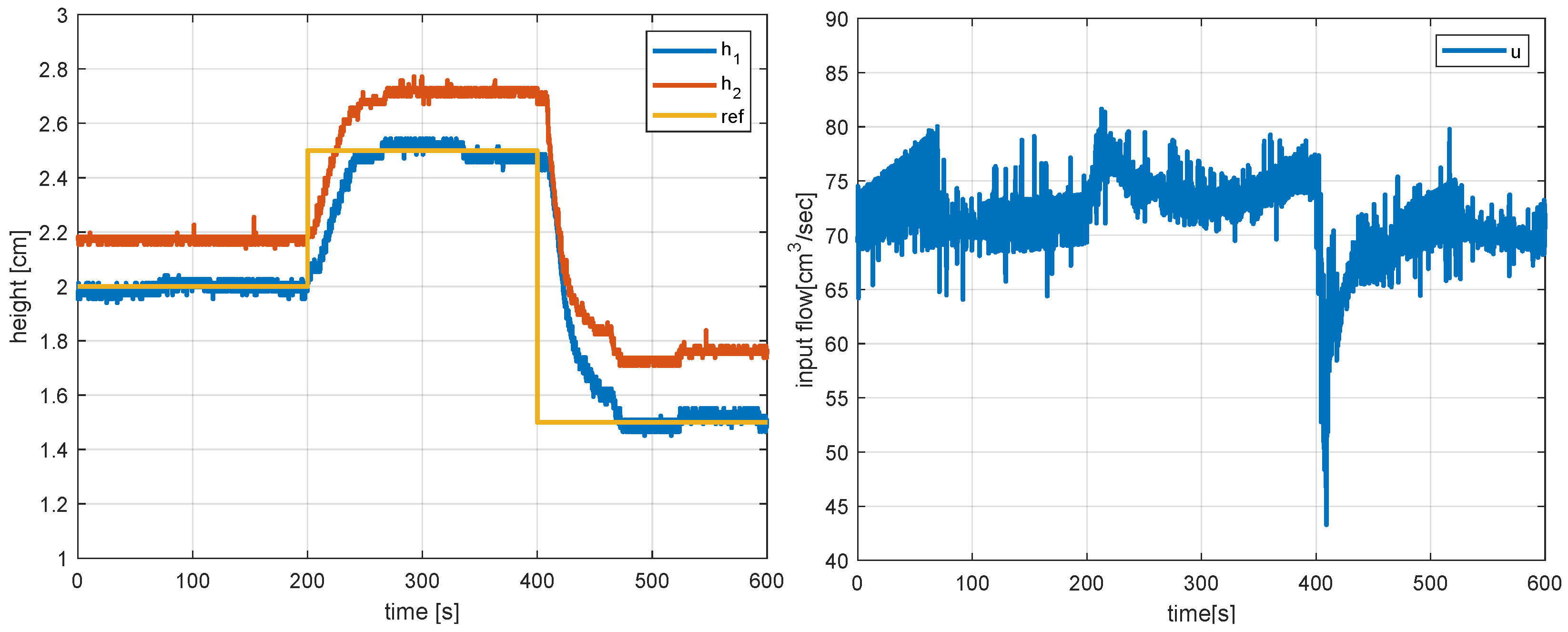
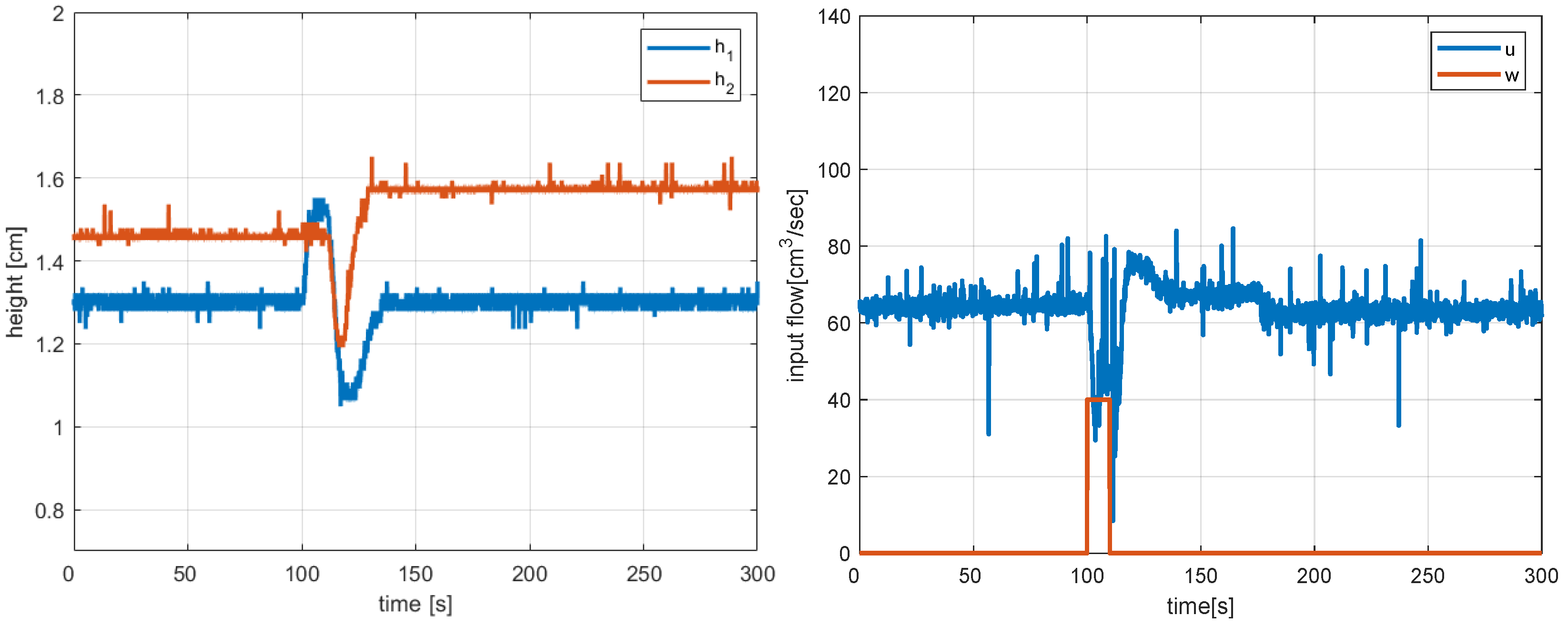
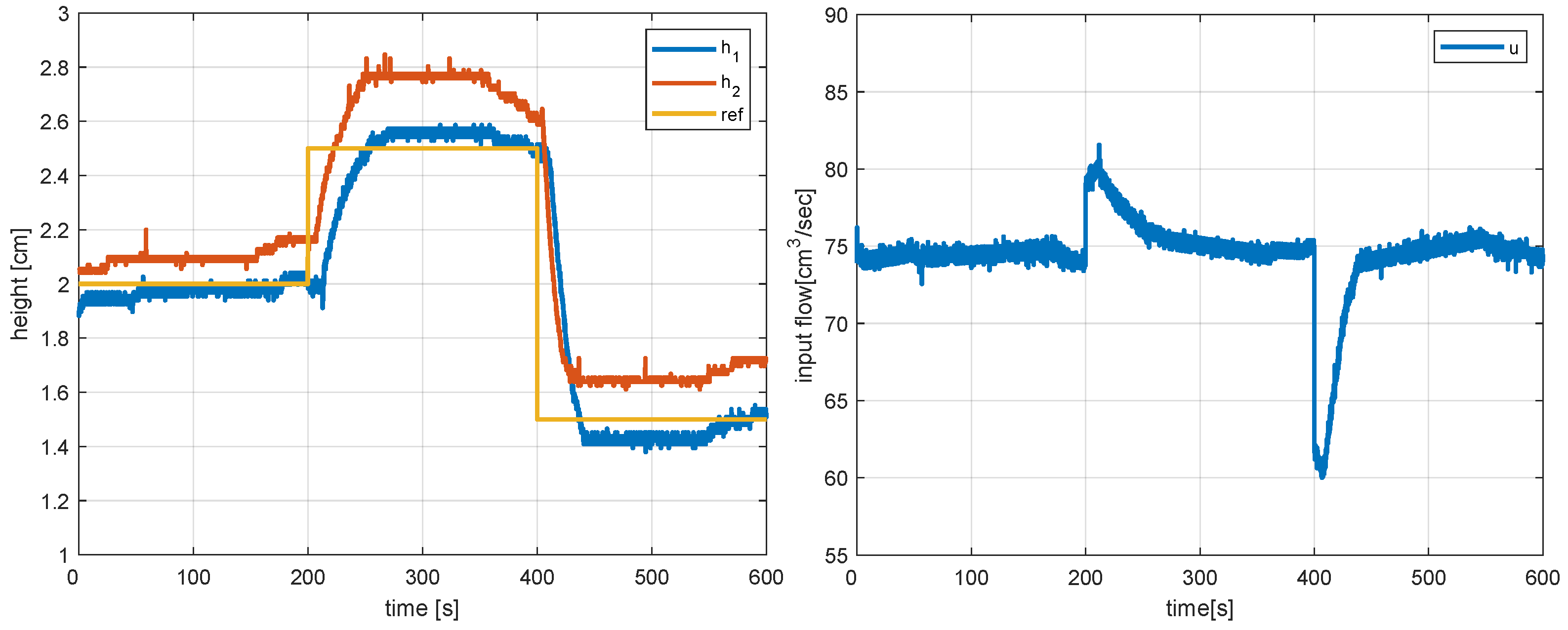
3.6.1. Real-Time Results for Tracking and Disturbance Rejection
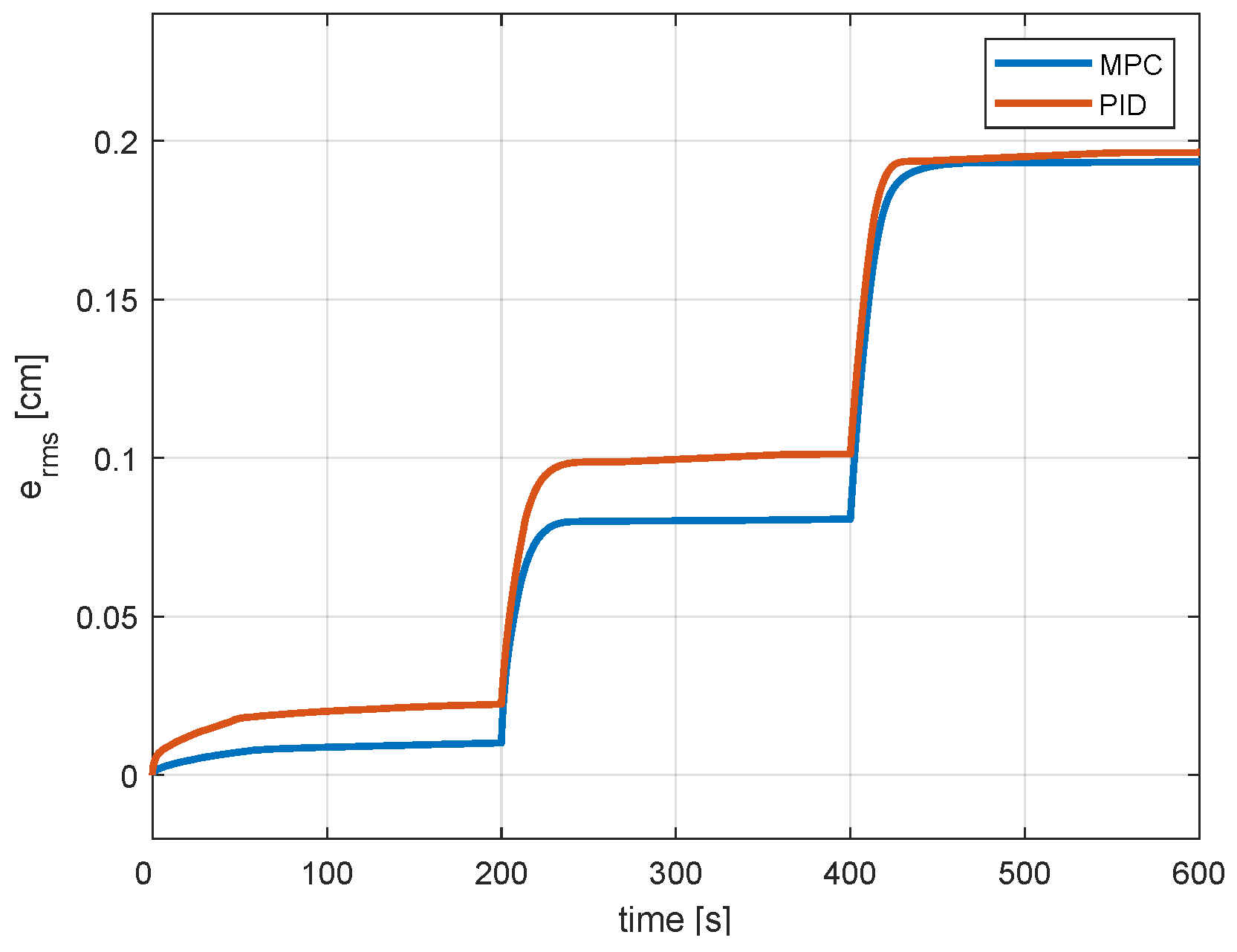
3.6.2. Comparison between NMPC and PID
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Pannocchia, G.; Gabiccini, M.; Artoni, A. Offset-free MPC explained: Novelties, subtleties, and applications. In Proceedings of the 5th IFAC Conference on Nonlinear Model Predictive Control NMPC 2015, Seville, Spain, 17–20 September 2015; IFAC-PapersOnLine. Volume 48, pp. 342–351. [Google Scholar] [CrossRef]
- Muske, K.R.; Badgwell, T.A. Disturbance modeling for offset-free linear model predictive control. J. Process. Control 2002, 12, 617–632. [Google Scholar] [CrossRef]
- Rawlings, J. Tutorial overview of model predictive control. IEEE Control. Syst. Mag. 2000, 20, 38–52. [Google Scholar] [CrossRef]
- Morari, M.; Maeder, U. Nonlinear offset-free model predictive control. Automatica 2012, 48, 2059–2067. [Google Scholar] [CrossRef]
- Son, S.H.; Narasingam, A.; Kwon, J.S.I. Development of offset-free Koopman Lyapunov-based model predictive control and mathematical analysis for zero steady-state offset condition considering influence of Lyapunov constraints on equilibrium point. J. Process. Control 2022, 118, 26–36. [Google Scholar] [CrossRef]
- Chen, J.; Dang, Y.; Han, J. Offset-free model predictive control of a soft manipulator using the Koopman operator. Mechatronics 2022, 86, 102871. [Google Scholar] [CrossRef]
- Son, S.H.; Choi, H.K.; Kwon, J.S.I. Application of offset-free Koopman-based model predictive control to a batch pulp digester. AIChE J. 2021, 67, e17301. [Google Scholar] [CrossRef]
- Kumar, P.; Rawlings, J.B.; Carrette, P. Modeling proportional–integral controllers in tracking and economic model predictive control. J. Process. Control 2023, 122, 1–12. [Google Scholar] [CrossRef]
- Limon, D.; Ferramosca, A.; Alvarado, I.; Alamo, T. Nonlinear MPC for Tracking Piece-Wise Constant Reference Signals. IEEE Trans. Autom. Control. 2018, 63, 3735–3750. [Google Scholar] [CrossRef]
- Ruscio, D. Model Predictive Control with Integral Action: A simple MPC algorithm. Model. Identif. Control Nor. Res. Bull. 2013, 34, 119–129. [Google Scholar] [CrossRef]
- Ebirim, K.U.; Lecchini-Visintini, A.; Rubagotti, M.; Prempain, E. Constrained Model Predictive Control With Integral Action for Twin Rotor MIMO Systems. J. Dyn. Syst. Meas. Control 2023, 145, 081006. [Google Scholar] [CrossRef]
- Englert, T.; Völz, A.; Mesmer, F.; Rhein, S.; Graichen, K. A software framework for embedded nonlinear model predictive control using a gradient-based augmented Lagrangian approach (GRAMPC). Optim. Eng. 2019, 20, 769–809. [Google Scholar] [CrossRef]
- Khalil, H. Nonlinear Systems; Pearson Education, Prentice Hall: Hoboken, NJ, USA, 2002. [Google Scholar]
- Slotine, J.; Li, W. Applied Nonlinear Control; Prentice-Hall International Editions, Prentice-Hall: Hoboken, NJ, USA, 1991. [Google Scholar]
- Bryson, A.E.; Ho, Y.C. Applied Optimal Control; Blaisdell: New York, NY, USA, 1969. [Google Scholar]
- Borrelli, F.; Bemporad, A.; Morari, M. Predictive Control for Linear and Hybrid Systems, 1st ed.; Cambridge University Press: New York, NY, USA, 2017. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| g | ||||||||
|---|---|---|---|---|---|---|---|---|
| [cm2] | [cm2] | [cm2] | [cm2] | [cm2] | [cm2] | [cm2] | [cm2] | [cm2] |
| 150 | 0.45 | 0.87 | 0.85 | 981 | 0.1 | 0.2 | 0.2 | 0.2 |
| [cm] | |||
|---|---|---|---|
| Set-point 1 | Set-point 2 | Set-point 3 | |
| ∼ | 0 s∼200 s | 200 s∼400 s | 400 s∼600 s |
| Non-linear MPC | 0.0197 | 0.1399 | 0.3084 |
| PID | 0.0406 | 0.1731 | 0.2954 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Prempain, E. A Non-Linear Offset-Free Model Predictive Control Design Approach. Actuators 2024, 13, 322. https://doi.org/10.3390/act13080322
Zhang H, Prempain E. A Non-Linear Offset-Free Model Predictive Control Design Approach. Actuators. 2024; 13(8):322. https://doi.org/10.3390/act13080322
Chicago/Turabian StyleZhang, Haoran, and Emmanuel Prempain. 2024. "A Non-Linear Offset-Free Model Predictive Control Design Approach" Actuators 13, no. 8: 322. https://doi.org/10.3390/act13080322
APA StyleZhang, H., & Prempain, E. (2024). A Non-Linear Offset-Free Model Predictive Control Design Approach. Actuators, 13(8), 322. https://doi.org/10.3390/act13080322