
Robustness Improved Method for Deadbeat Predictive Current Control of PMLSM with Segmented Stators


Abstract
1. Introduction
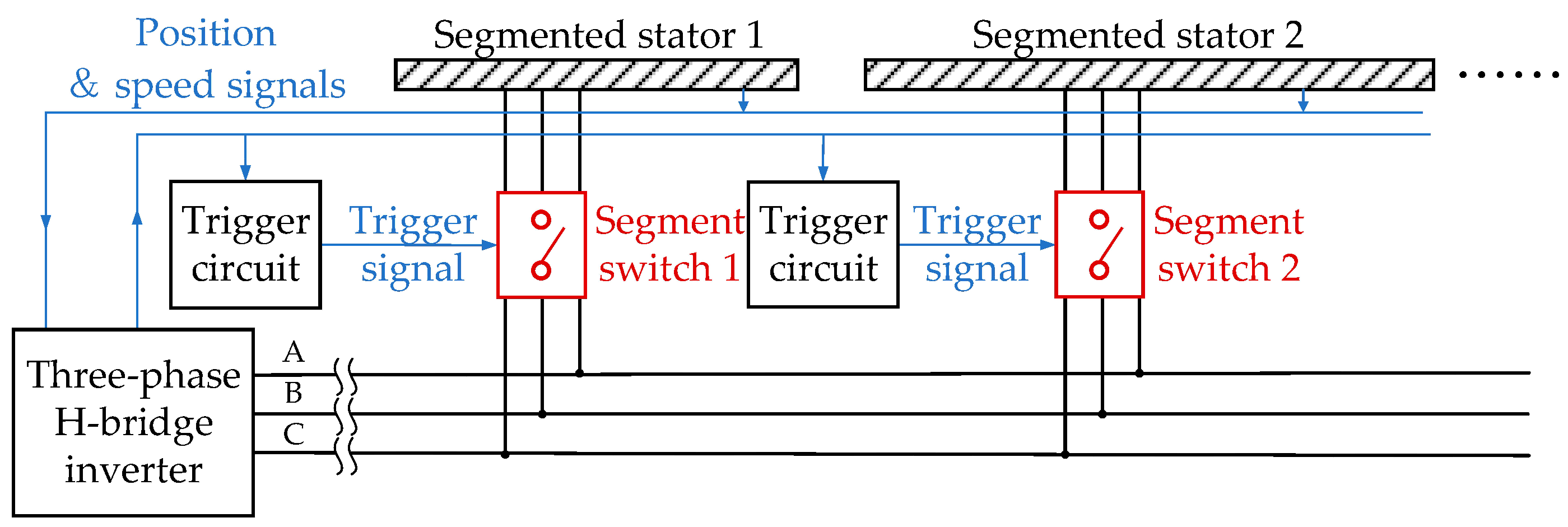
2. PMLSM Modeling for Segmented Designs
3. Incremental Models for Flux Linkage Perturbation and Delay Optimization
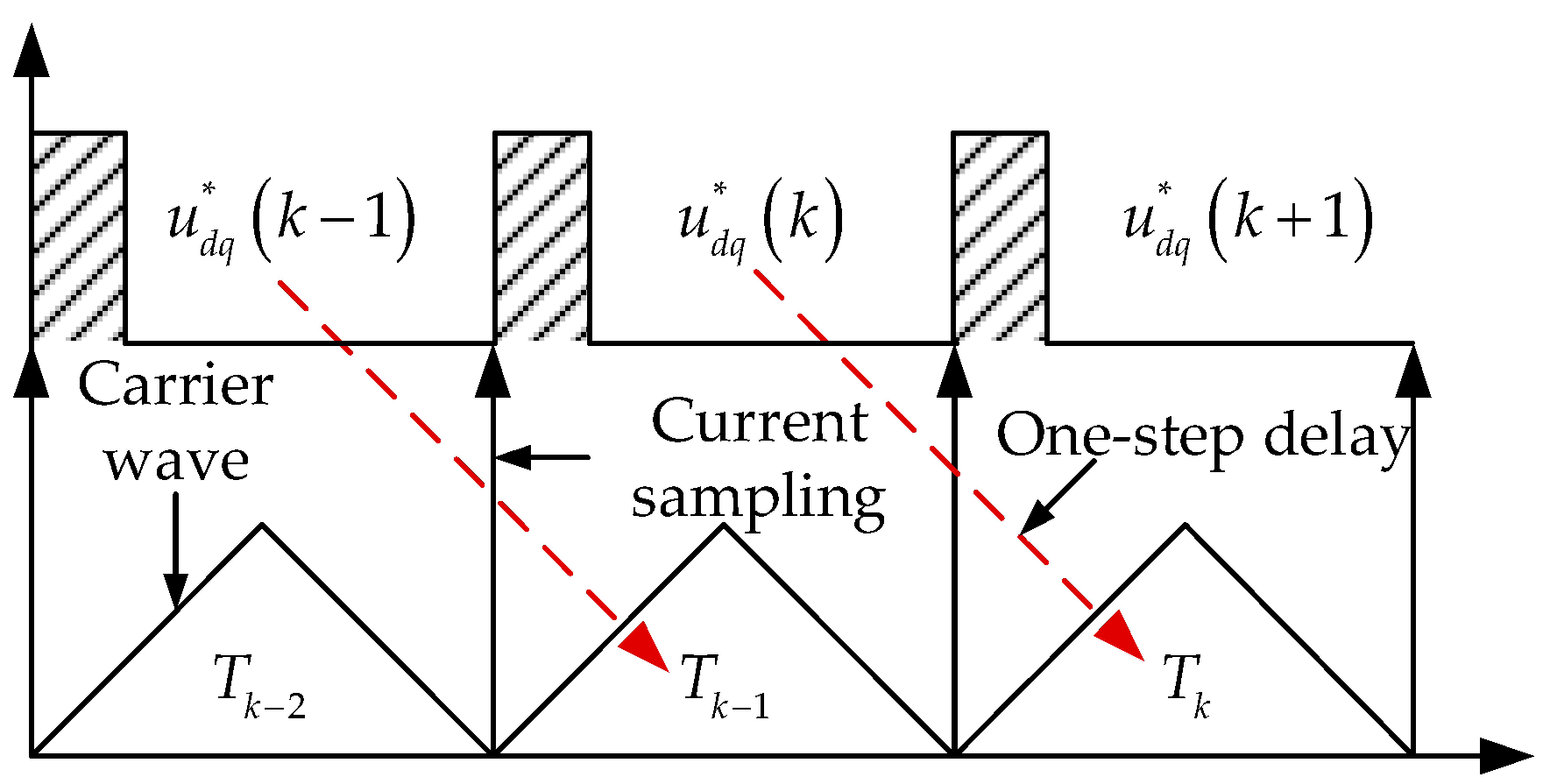
3.1. DPCC with Delay Compensation
3.2. IDPCC without Flux Linkage Parameters
4. Parametric Robustness Improvement of Inductance
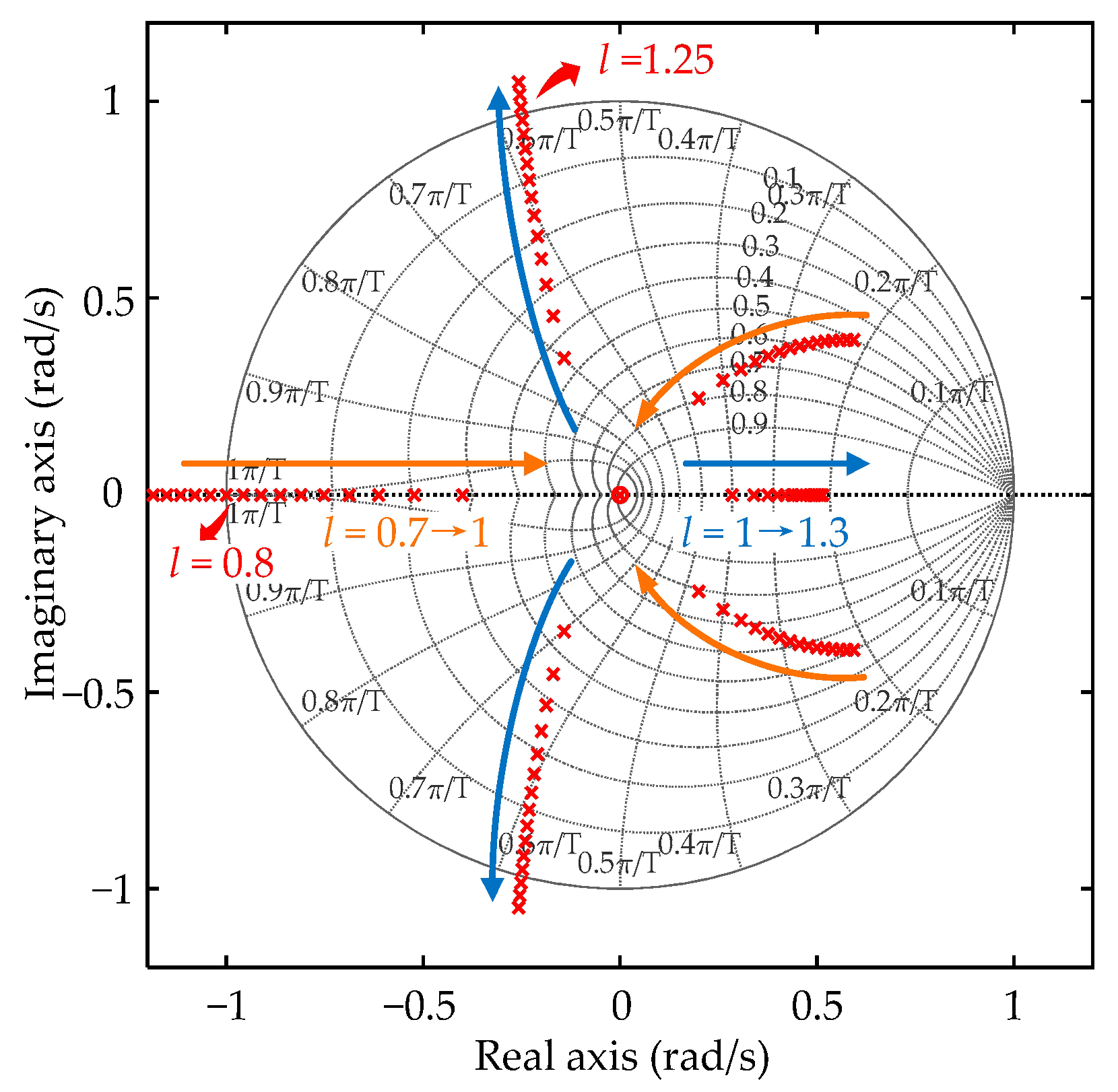
4.1. Inductance Stability Analysis of I-DPCC
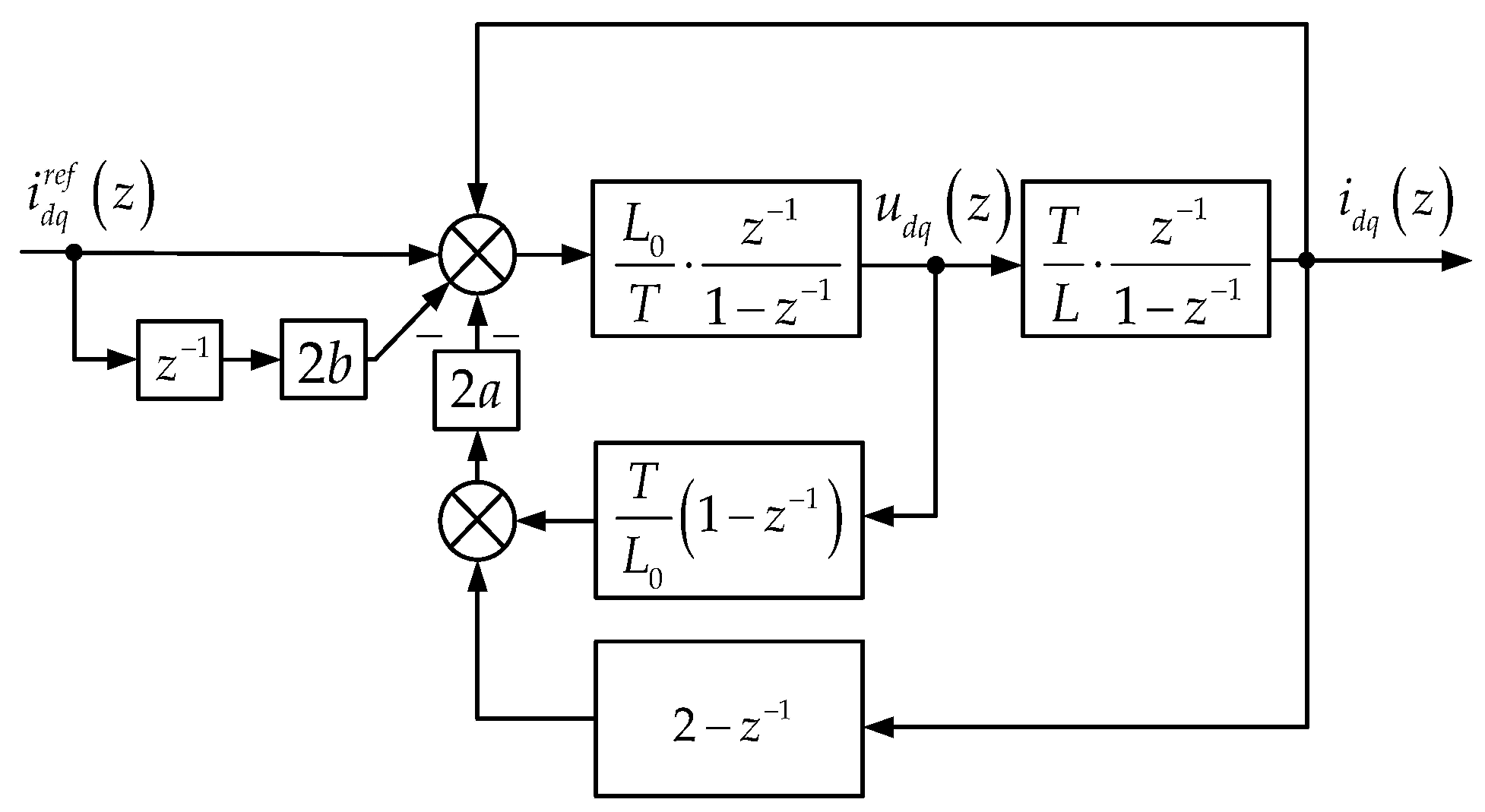
4.2. Principle of RII-DPCC
4.3. Stability Analysis of RII-DPCC
4.4. Steady-State Error Analysis
5. Simulation and Experiment Results
5.1. Effect of Delay Compensation on Control Performance
5.2. Comparison of Flux Linkage Parameter Robustness
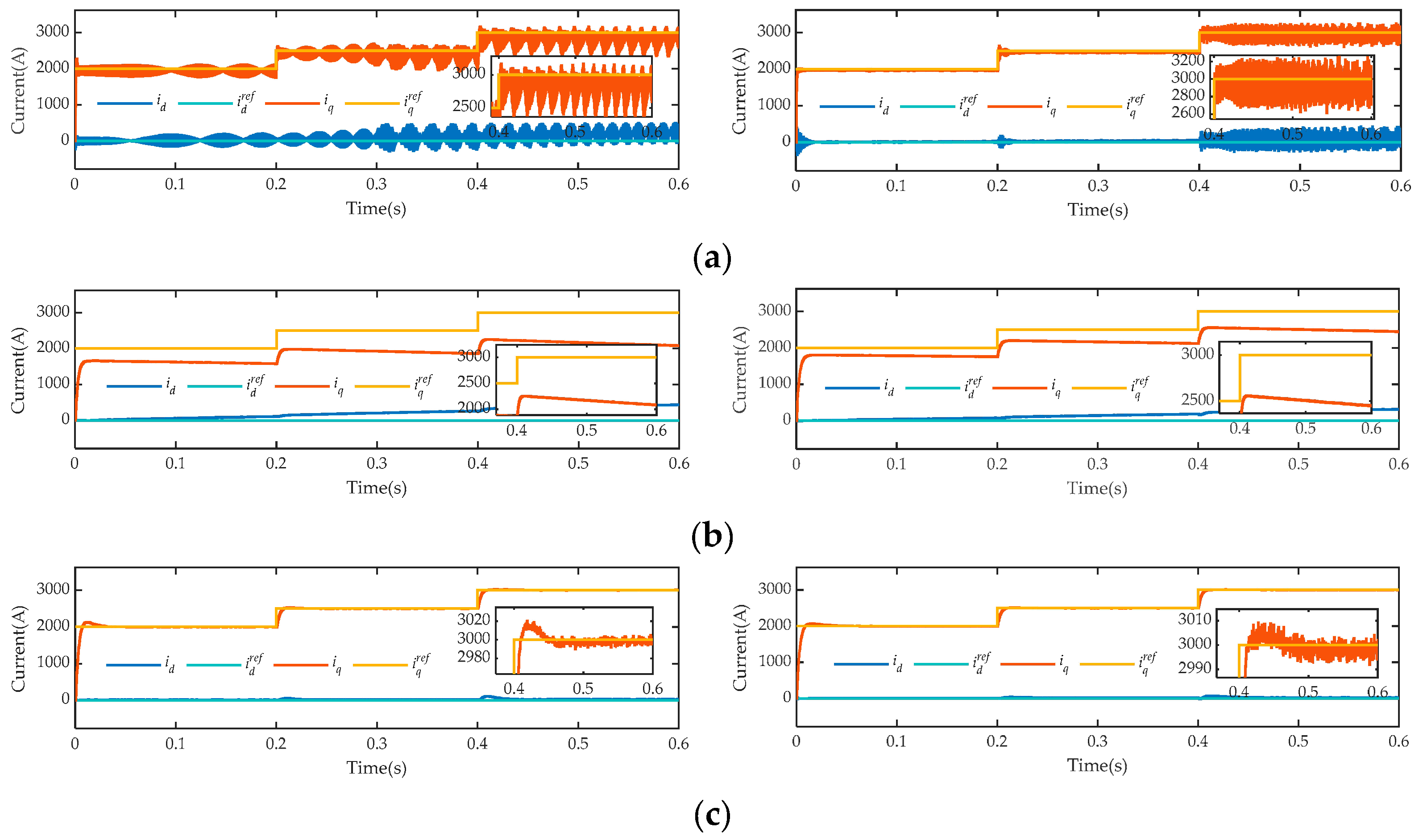
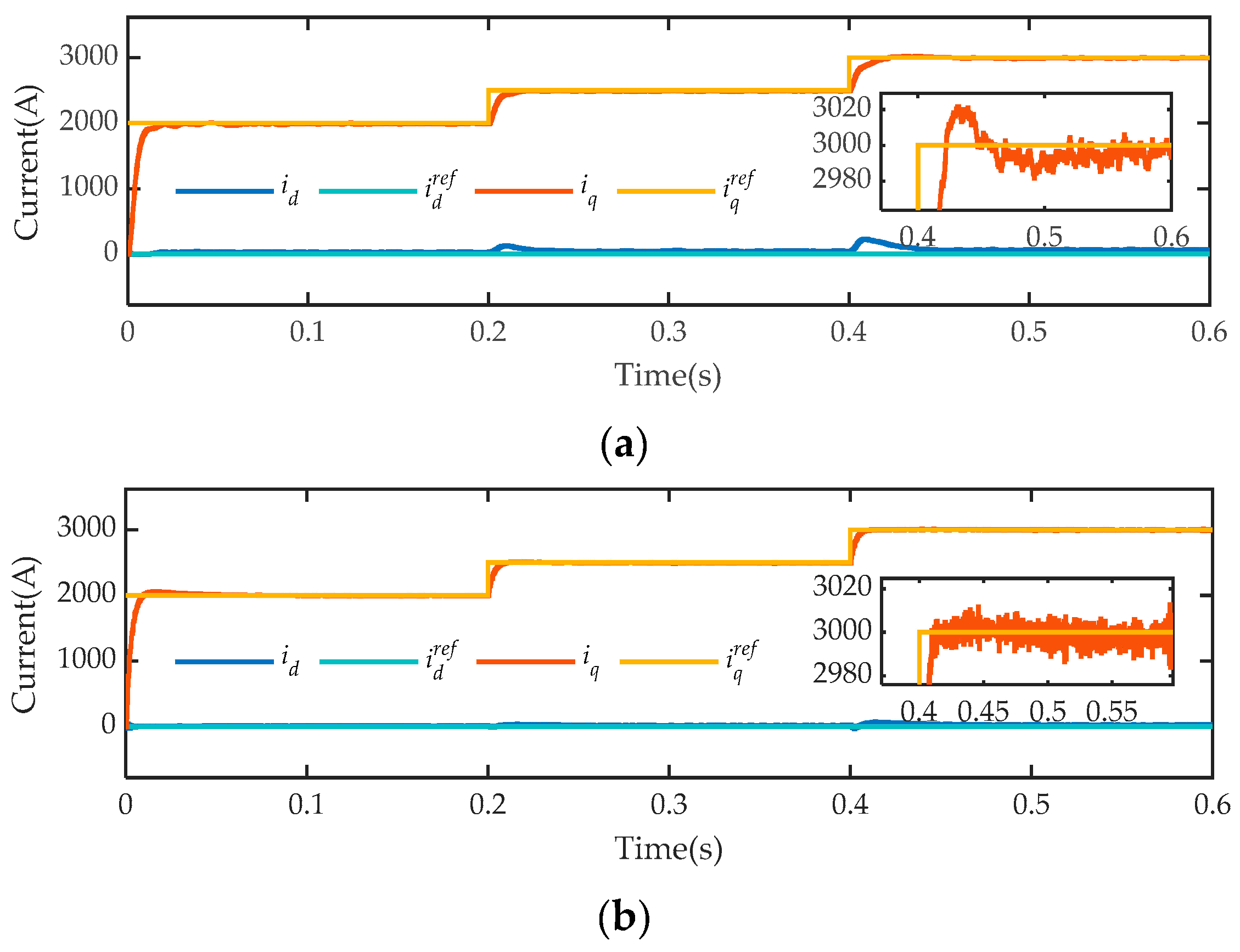
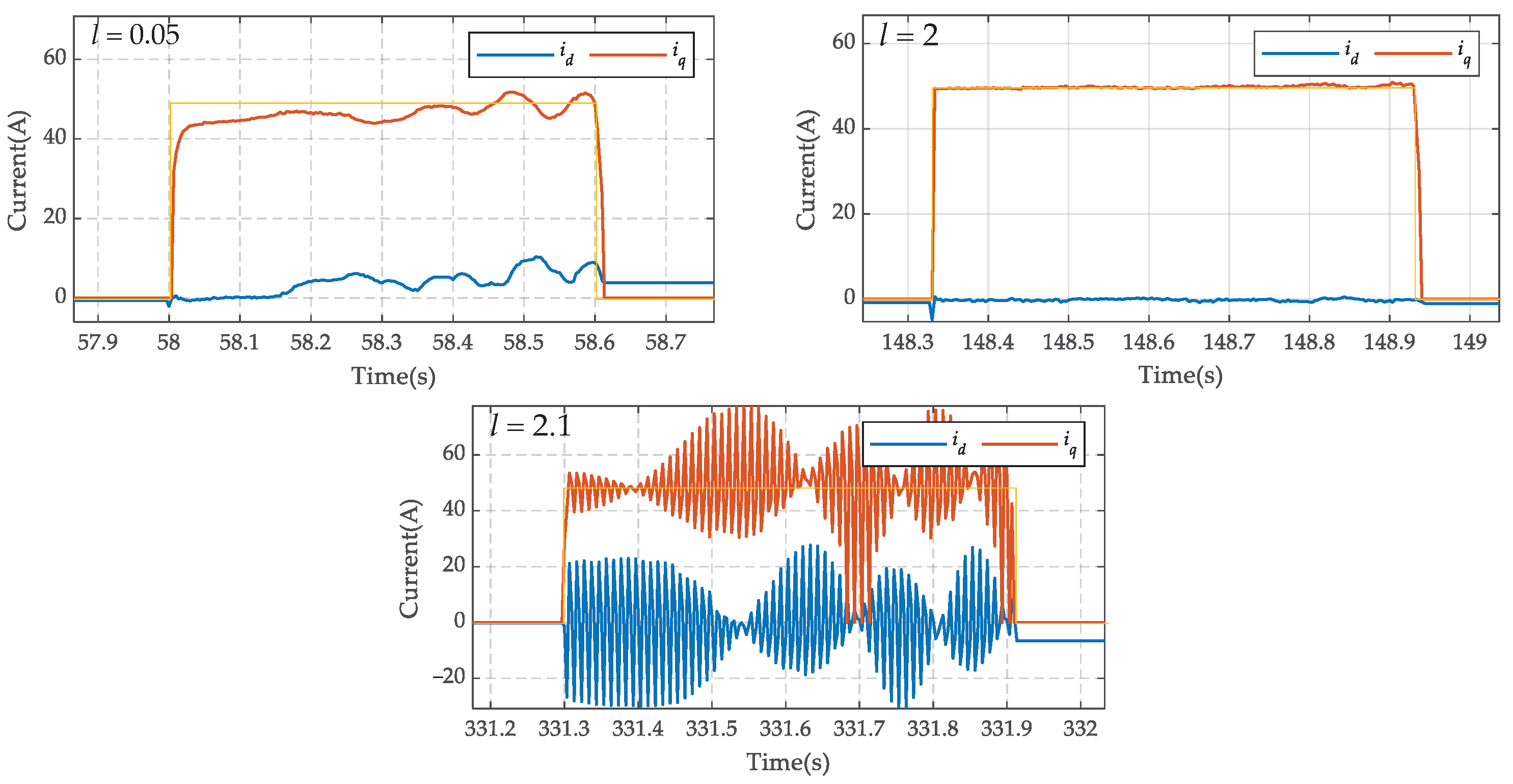
5.3. Comparison of Inductance Parameter Robustness
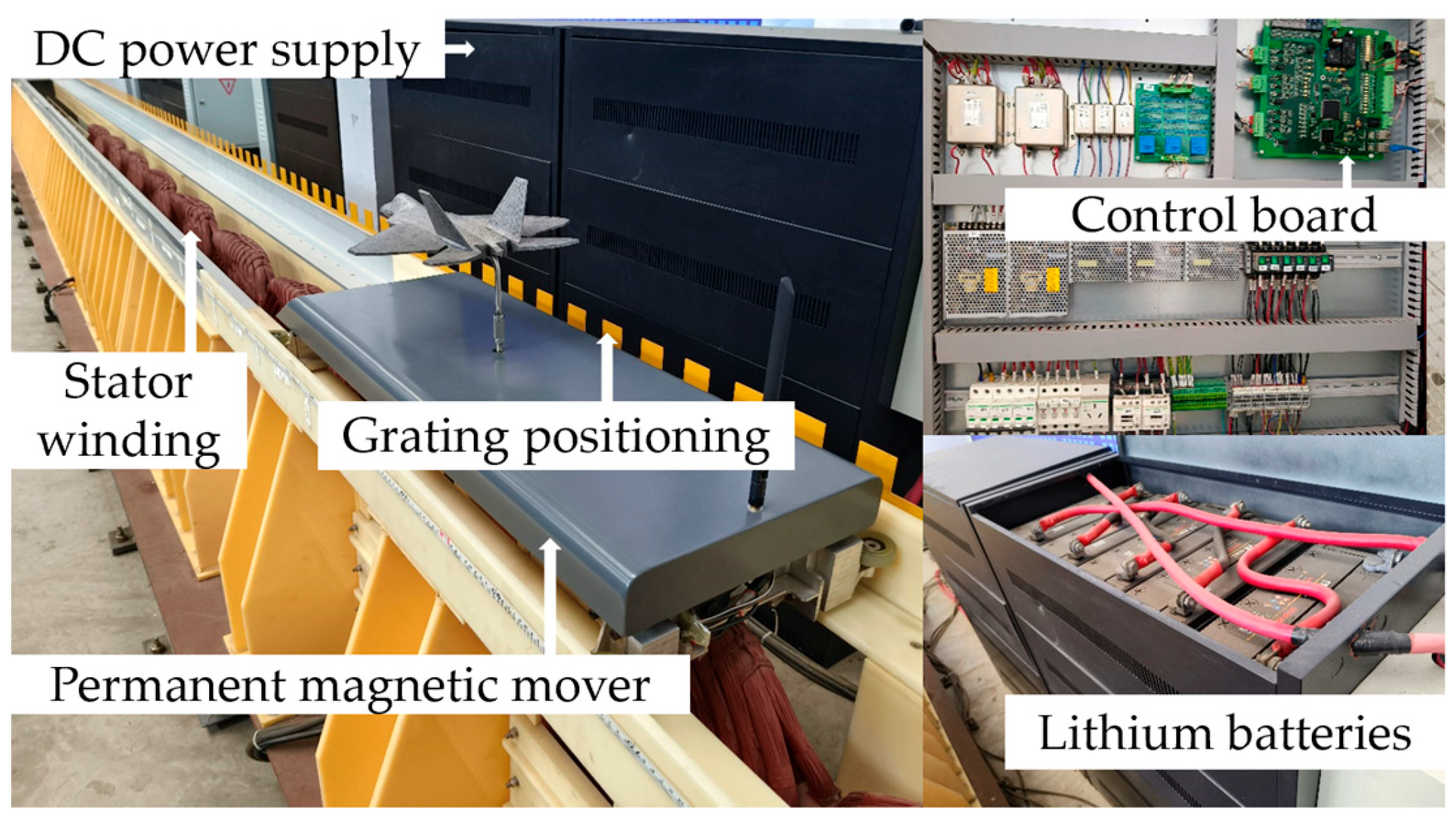
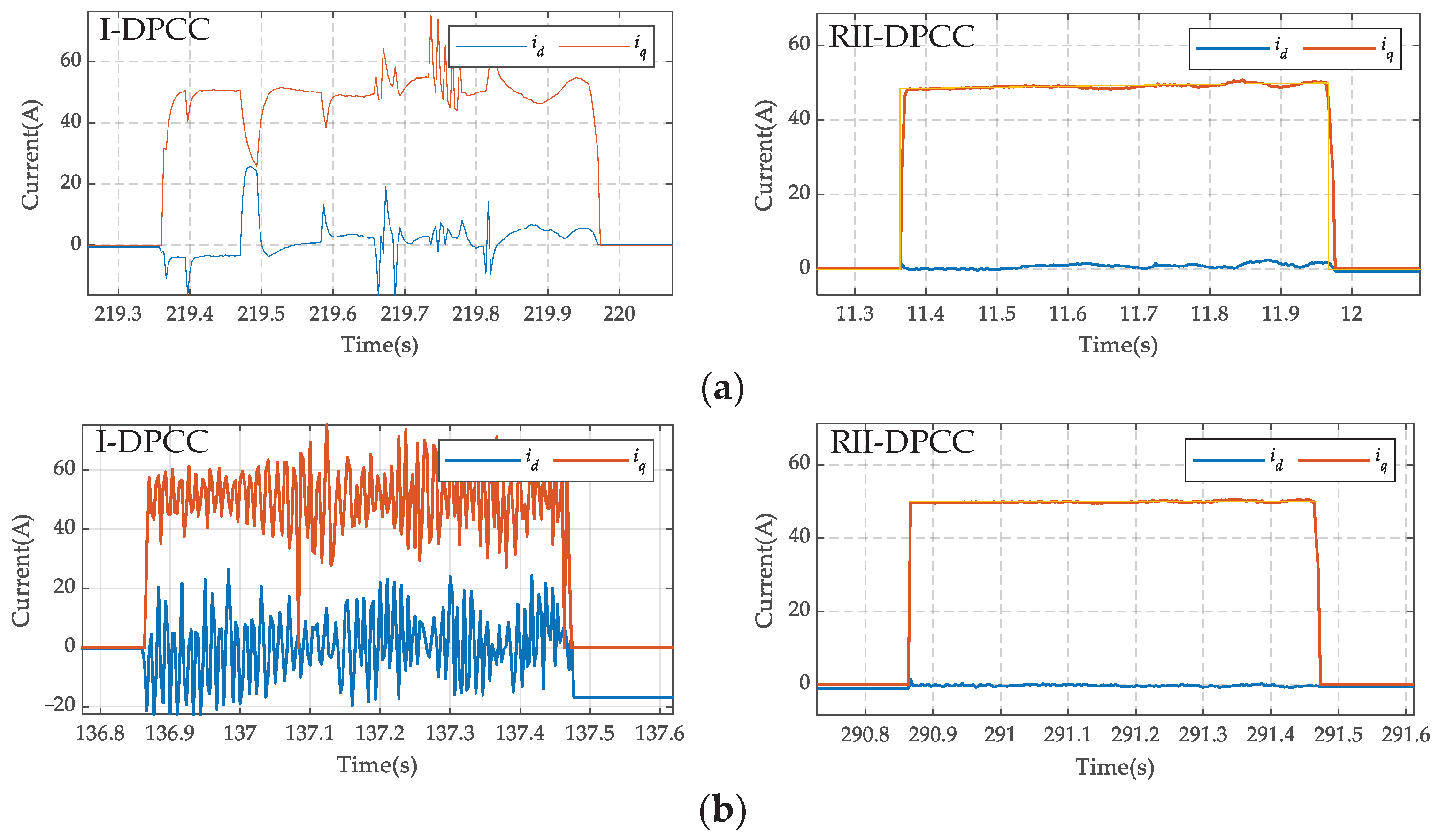
5.4. Experimental Results of the Proposed Method
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tavana, N.R.; Shoulaie, A.; Dinavahi, V. Analytical Modeling and Design Optimization of Linear Synchronous Motor with Stair-Step-Shaped Magnetic Poles for Electromagnetic Launch Applications. IEEE Trans. Plasma Sci. 2012, 40, 519–527. [Google Scholar] [CrossRef]
- Tan, Y.; Zhou, D.; Li, J.; Chen, Q.; Jia, Z.; Leng, P.; Liu, M. Dynamic Simulation Analysis of Null-Flux Coil Superconducting Electrodynamic Suspension System. IEEE Trans. Intell. Veh. 2024, 9, 1005–1016. [Google Scholar] [CrossRef]
- Wang, M.; Kang, K.; Zhang, C.; Li, L. A Driver and Control Method for Primary Stator Discontinuous Segmented-PMLSM. Symmetry 2021, 13, 2216. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, Q.; Wang, Y. A New Sliding-Mode Observer-Based Deadbeat Predictive Current Control Method for Permanent Magnet Motor Drive. Machines 2024, 12, 297. [Google Scholar] [CrossRef]
- Zhang, T.; Mei, X. Research on Detent Force Characteristics of Winding Segmented Permanent Magnet Linear Synchronous Motor Based on Analytical Model. Symmetry 2022, 14, 1049. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, G.; Liu, X. Sensorless Control of Surface-Mount Permanent-Magnet Synchronous Motors Based on an Adaptive Super-Twisting Sliding Mode Observer. Mathematics 2024, 12, 2029. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, Z. Model Predictive Control for PMSM Drives with Variable Dead-Zone Time. IEEE Trans. Power Electron. 2021, 36, 10514–10525. [Google Scholar] [CrossRef]
- Zhang, R.; Yin, Z.; Du, N.; Liu, J.; Tong, X. Robust Adaptive Current Control of a 1.2-MW Direct-Drive PMSM for Traction Drives Based on Internal Model Control with Disturbance Observer. IEEE Trans. Transp. Electrif. 2021, 7, 1466–1481. [Google Scholar] [CrossRef]
- Mohamed, Y.A.-R.I.; El-Saadany, E.F. A Current Control Scheme with an Adaptive Internal Model for Torque Ripple Minimization and Robust Current Regulation in PMSM Drive Systems. IEEE Trans. Energy Convers. 2008, 23, 92–100. [Google Scholar] [CrossRef]
- Zhang, P.; Shi, Z.; Yu, B.; Qi, H. Research on a Sensorless ADRC Vector Control Method for a Permanent Magnet Synchronous Motor Based on the Luenberger Observer. Processes 2024, 12, 906. [Google Scholar] [CrossRef]
- Andersson, A.; Thiringer, T. Motion Sensorless IPMSM Control Using Linear Moving Horizon Estimation with Luenberger Observer State Feedback. IEEE Trans. Transp. Electrif. 2018, 4, 464–473. [Google Scholar] [CrossRef]
- Zhang, L.; Tao, R.; Bai, J.; Zeng, D. An Improved Sliding Mode Model Reference Adaptive System Observer for PMSM Applications. Expert Syst. Appl. 2024, 250, 123907. [Google Scholar] [CrossRef]
- Wu, X.; Chen, H.; Liu, B.; Wu, T.; Wang, C.; Huang, S. Improved Deadbeat Predictive Current Control of PMSM Based on a Resistance Adaptive Position Observer. IEEE Trans. Transp. Electrif. 2024. [Google Scholar] [CrossRef]
- Naikawadi, K.M.; Patil, S.M.; Kalantri, K.; Dhanvijay, M.R. Comparative Analysis of Features of Online Numerical Methods Used for Parameter Estimation of PMSM. IJPEDS 2022, 13, 2172. [Google Scholar] [CrossRef]
- Yuan, T.; Chang, J.; Zhang, Y. Parameter Identification of Permanent Magnet Synchronous Motor with Dynamic Forgetting Factor Based on H∞ Filtering Algorithm. Actuators 2023, 12, 453. [Google Scholar] [CrossRef]
- Ahn, H.; Kim, S.; Park, J.; Chung, Y.; Hu, M.; You, K. Adaptive Quick Sliding Mode Reaching Law and Disturbance Observer for Robust PMSM Control Systems. Actuators 2024, 13, 136. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, S.; Zhang, C.; Zhou, Y. An Improved Deadbeat Predictive Current Control Based on Parameter Identification for PMSM. IEEE Trans. Transp. Electrif. 2024, 10, 2740–2753. [Google Scholar] [CrossRef]
- Rafaq, M.S.; Jung, J.-W. A Comprehensive Review of State-of-the-Art Parameter Estimation Techniques for Permanent Magnet Synchronous Motors in Wide Speed Range. IEEE Trans. Ind. Inf. 2020, 16, 4747–4758. [Google Scholar] [CrossRef]
- Zhang, X.; Huang, X. An Incremental Deadbeat Predictive Current Control Method for PMSM with Low Sensitivity to Parameter Variation. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; IEEE: New York, NY, USA, 2020; pp. 1060–1066. [Google Scholar]
- Liu, Z.; Huang, X.; Hu, Q.; Li, Z.; Jiang, Z.; Yu, Y.; Chen, Z. A Modified Deadbeat Predictive Current Control for Improving Dynamic Performance of PMSM. IEEE Trans. Power Electron. 2022, 37, 14173–14185. [Google Scholar] [CrossRef]
- Huang, X.; Hu, Q.; Liu, Z.; Li, W.; Yang, G.; Li, Z. A Robust Deadbeat Predictive Current Control Method for IPMSM. IEEE Trans. Transp. Electrif. 2023. [Google Scholar] [CrossRef]
- Blouh, F.; Bezza, M.; El Myasse, I. Modeling and Control of an Aerogenerator Utilizing DFIG and Direct Matrix Converter Technology. In Proceedings of the 2024 4th International Conference on Innovative Research in Applied Science, Engineering and Technology (IRASET), Fez, Morocco, 16–17 May 2024; IEEE: New York, NY, USA, 2024; pp. 1–6. [Google Scholar]
- Zhao, M.; Zhang, S.; Li, X.; Zhang, C.; Zhou, Y. Parameter Robust Deadbeat Predictive Current Control for Open-Winding Surface Permanent Magnet Synchronous Motor Drives. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 3117–3126. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, L.; Zhang, Y. Model Predictive Current Control for PMSM Drives with Parameter Robustness Improvement. IEEE Trans. Power Electron. 2019, 34, 1645–1657. [Google Scholar] [CrossRef]
- Wang, W.; Xi, X. Current Control Method for PMSM with High Dynamic Performance. In Proceedings of the 2013 International Electric Machines & Drives Conference, Chicago, IL, USA, 12–15 May 2013; IEEE: New York, NY, USA, 2013; pp. 1249–1254. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameters | Values |
|---|---|---|
| U | DC bus voltage | 720 V |
| R0 | Nominal stator resistance | 93.1 mΩ |
| L0 | Nominal stator inductance | 55.6 mH |
| Nominal mover flux linkage | 1.065 Wb | |
| m | Mover mass | 215 kg |
| τ | Polar distance | 0.54 m |
| p | Polar pairs | 3 |
| Symbol | Parameters | Values |
|---|---|---|
| U | DC bus voltage | 550 V |
| R0 | Nominal stator resistance | 12.64 mΩ |
| L0 | Nominal stator inductance | 22.2 mH |
| Nominal mover flux linkage | 0.1717 Wb | |
| m | Mover mass | 50 kg |
| τ | Polar distance | 0.27 m |
| p | Polar pairs | 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, S.; Leng, P.; Chen, Q.; Jin, Y.; Li, J.; Yu, P. Robustness Improved Method for Deadbeat Predictive Current Control of PMLSM with Segmented Stators. Actuators 2024, 13, 300. https://doi.org/10.3390/act13080300
Gu S, Leng P, Chen Q, Jin Y, Li J, Yu P. Robustness Improved Method for Deadbeat Predictive Current Control of PMLSM with Segmented Stators. Actuators. 2024; 13(8):300. https://doi.org/10.3390/act13080300
Chicago/Turabian StyleGu, Shijie, Peng Leng, Qiang Chen, Yuxin Jin, Jie Li, and Peichang Yu. 2024. "Robustness Improved Method for Deadbeat Predictive Current Control of PMLSM with Segmented Stators" Actuators 13, no. 8: 300. https://doi.org/10.3390/act13080300
APA StyleGu, S., Leng, P., Chen, Q., Jin, Y., Li, J., & Yu, P. (2024). Robustness Improved Method for Deadbeat Predictive Current Control of PMLSM with Segmented Stators. Actuators, 13(8), 300. https://doi.org/10.3390/act13080300