Design of a Novel Three-Degree-of-Freedom Piezoelectric-Driven Micro-Positioning Platform with Compact Structure

 ,
, 

Abstract
1. Introduction
2. The Overall Structure and Working Principle of the Platform
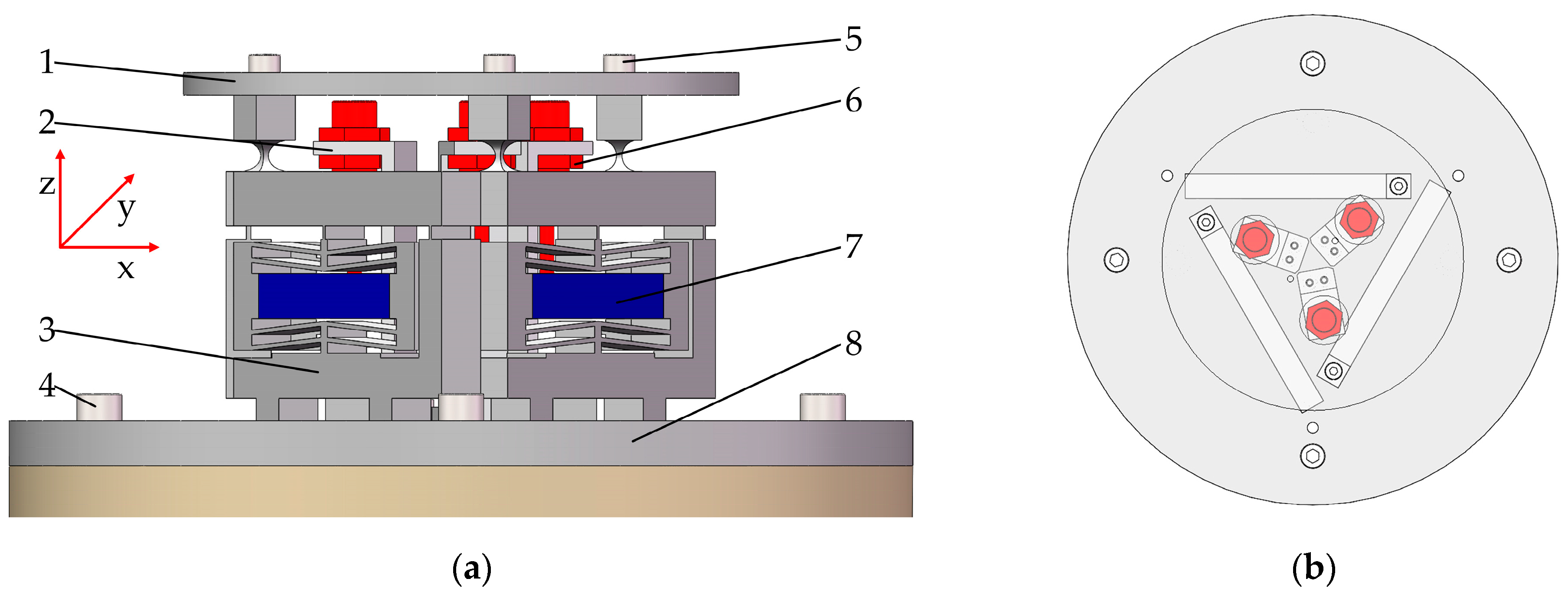
2.1. Overall Structure of the Platform
2.2. Working Principle of the Platform
3. Design of the Displacement Amplification Mechanism
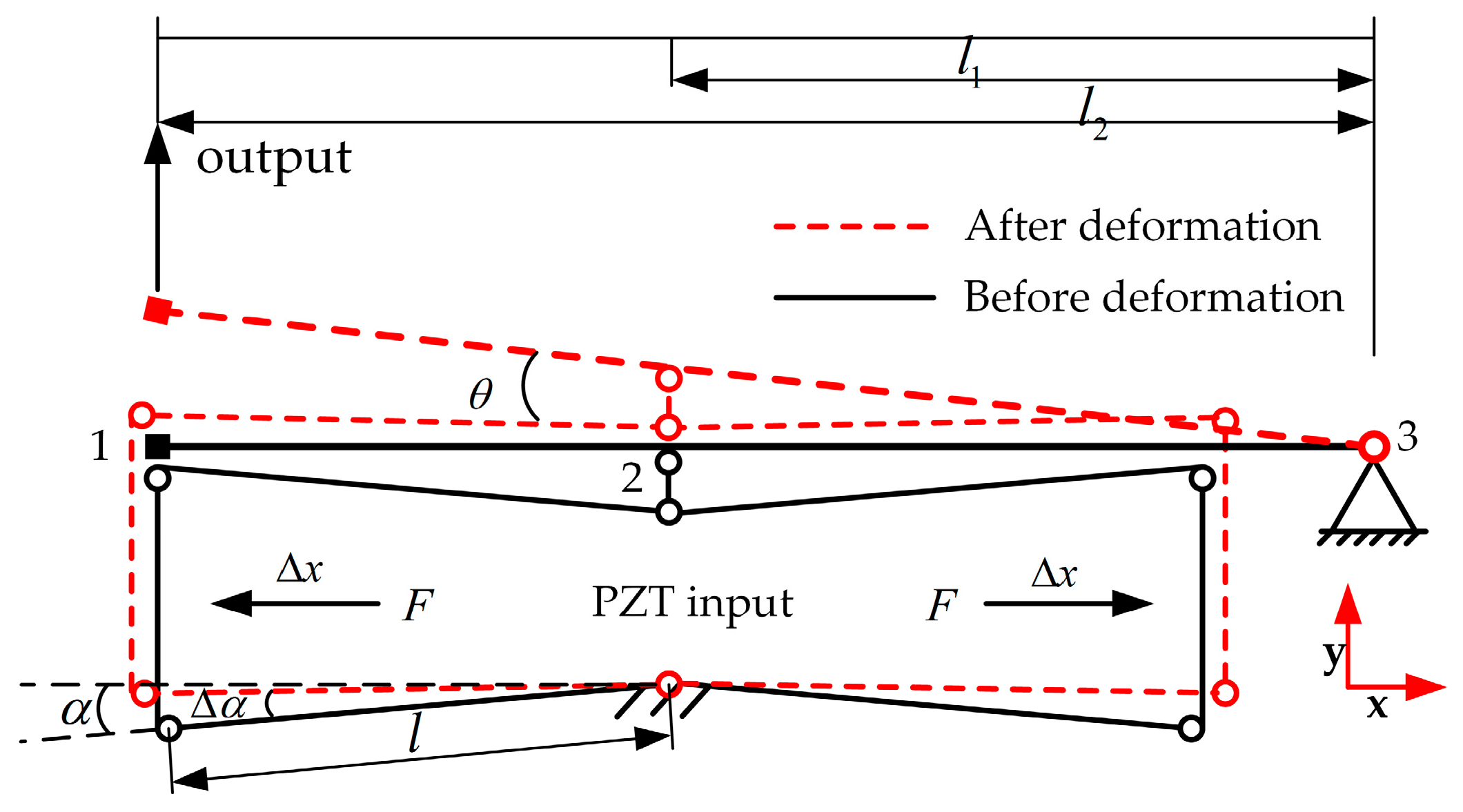
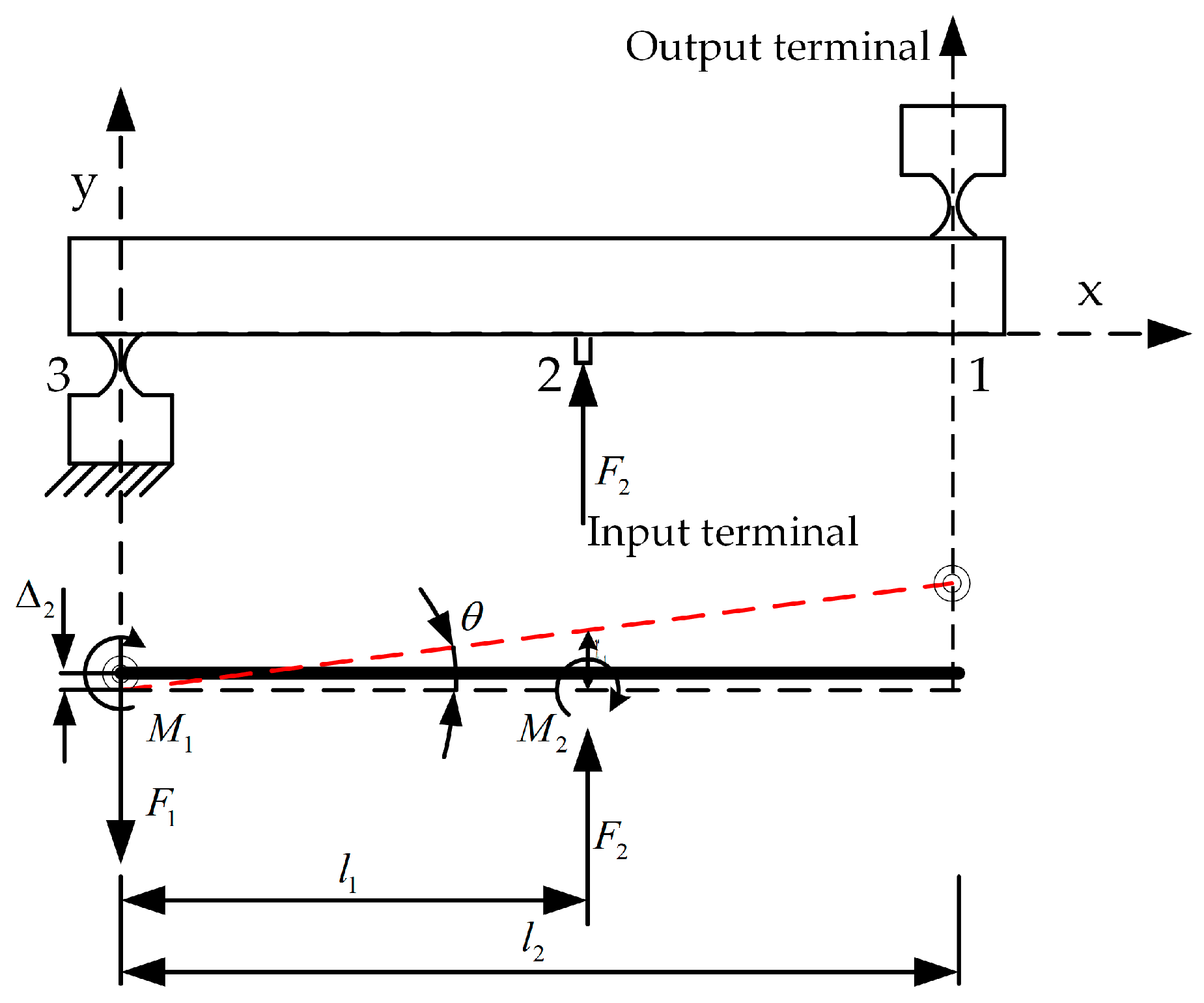
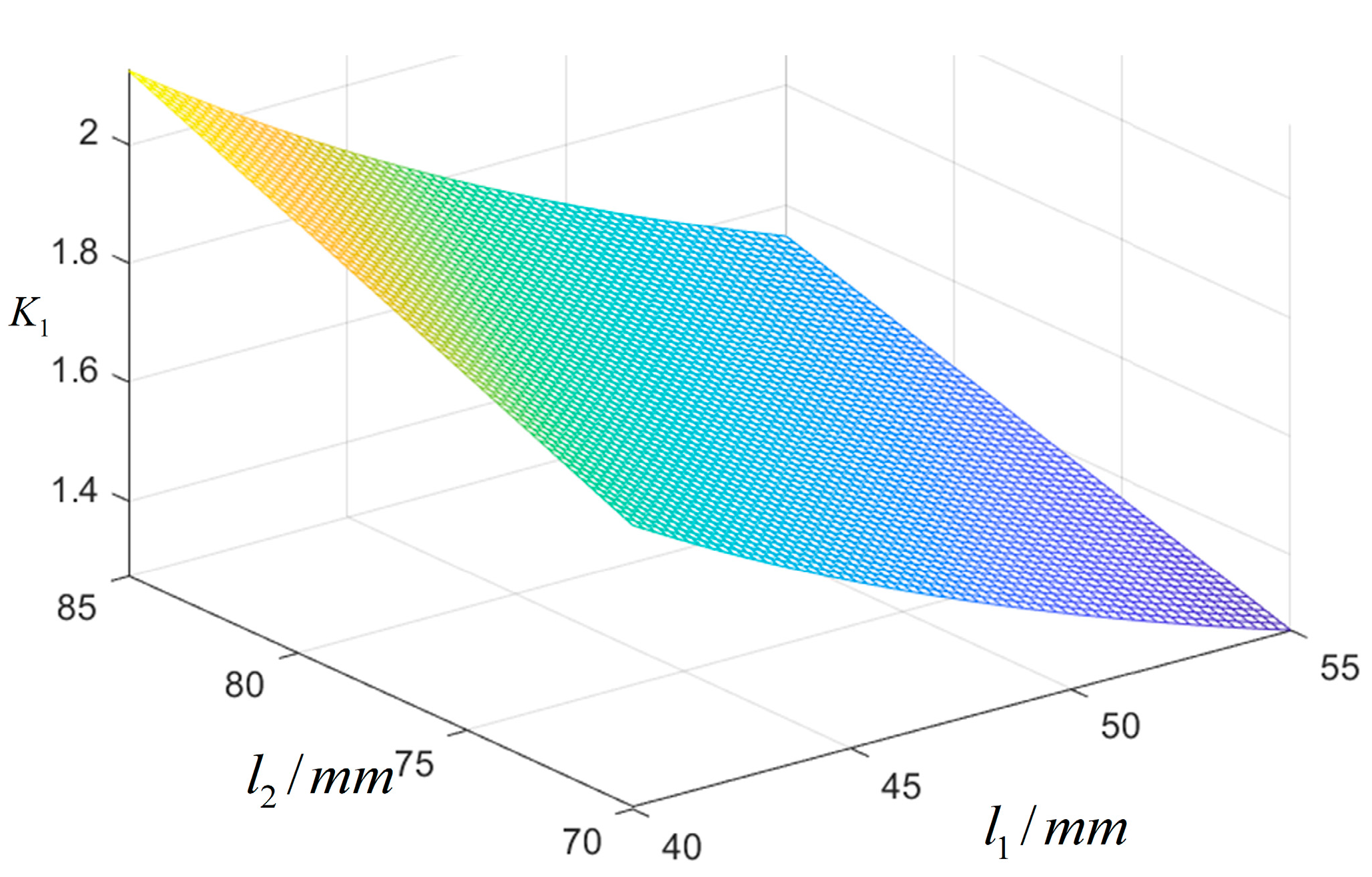
3.1. Structural Design of the Lever Displacement Amplification Mechanism
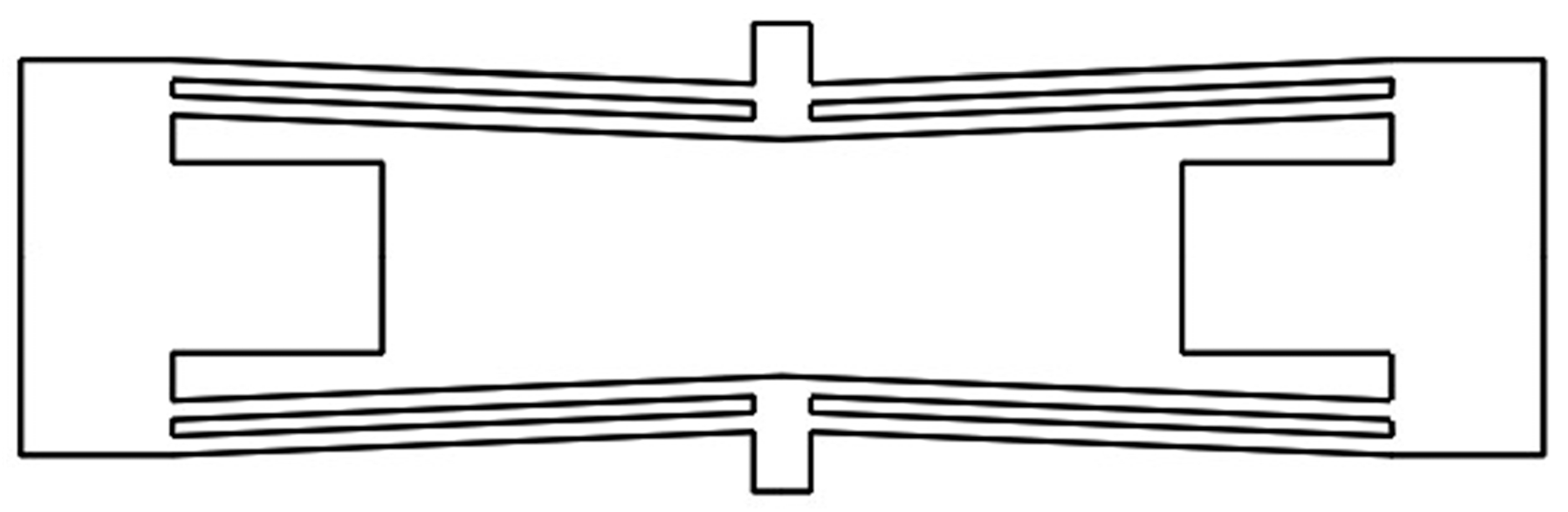
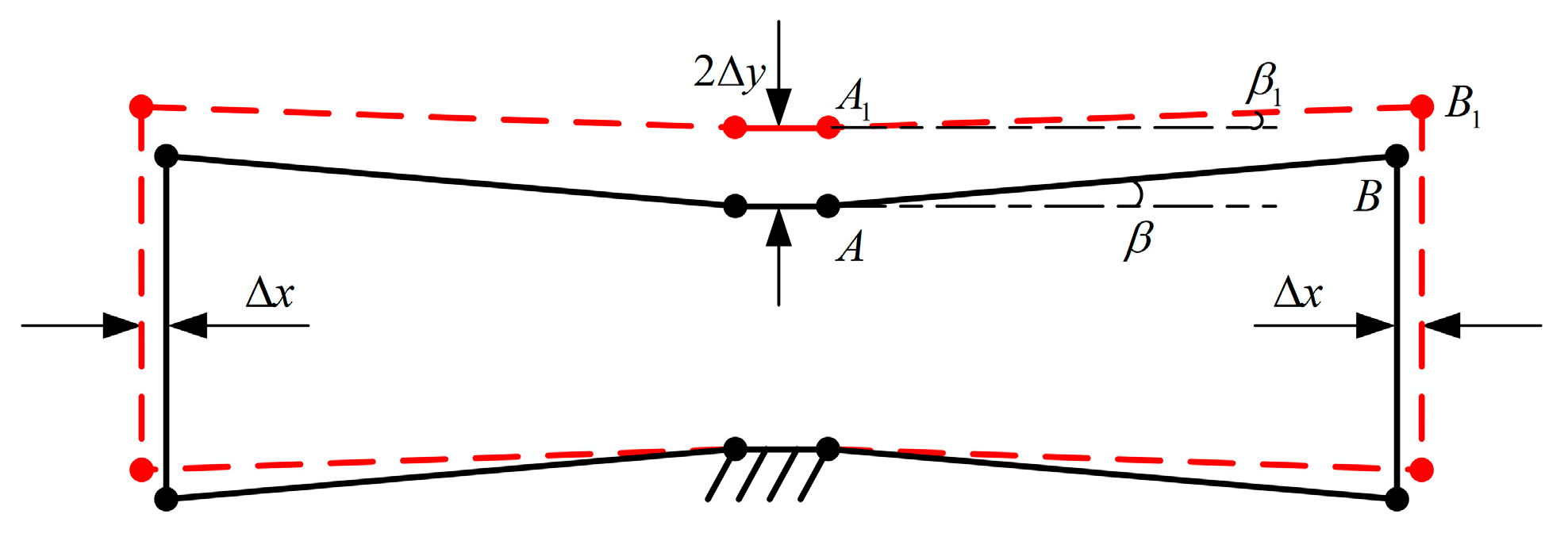
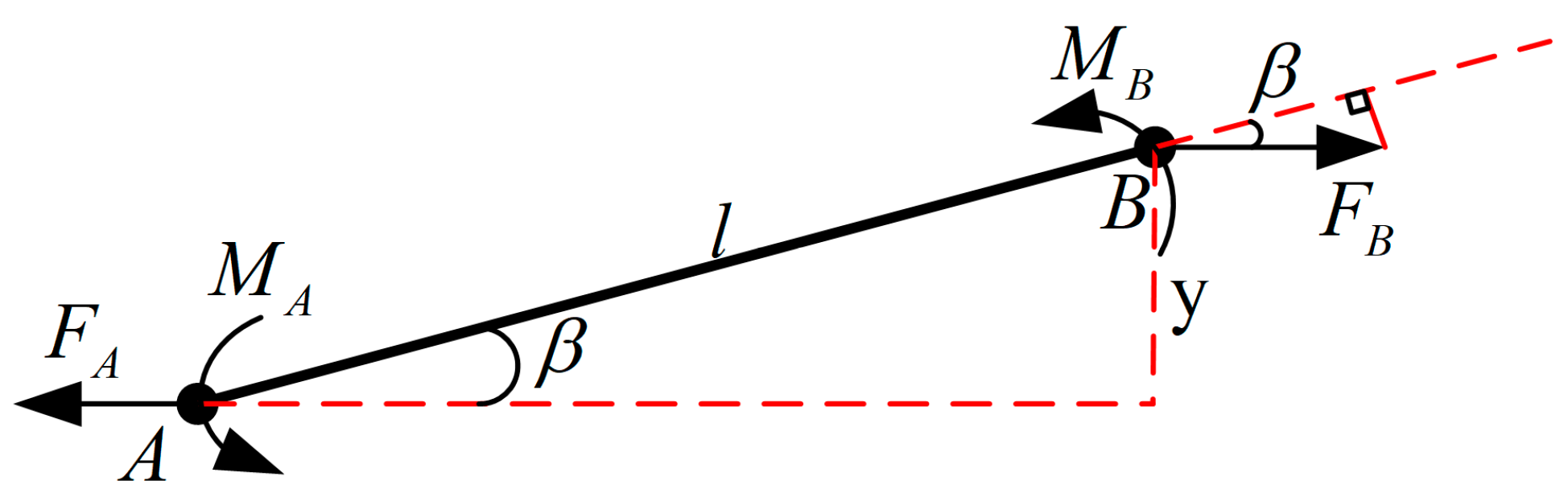
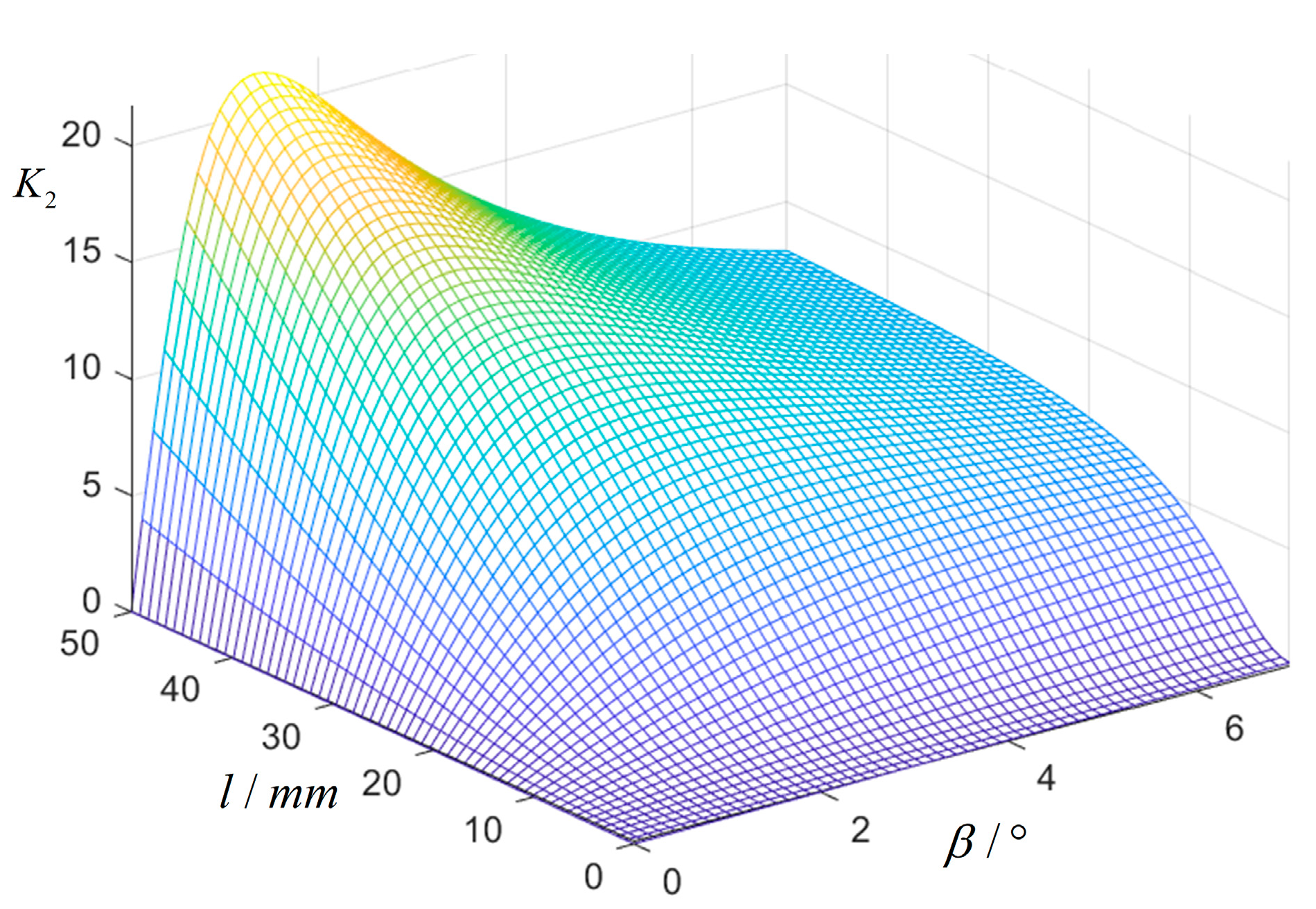
3.2. Structure Design of the Compound Bridge Displacement Amplification Mechanism
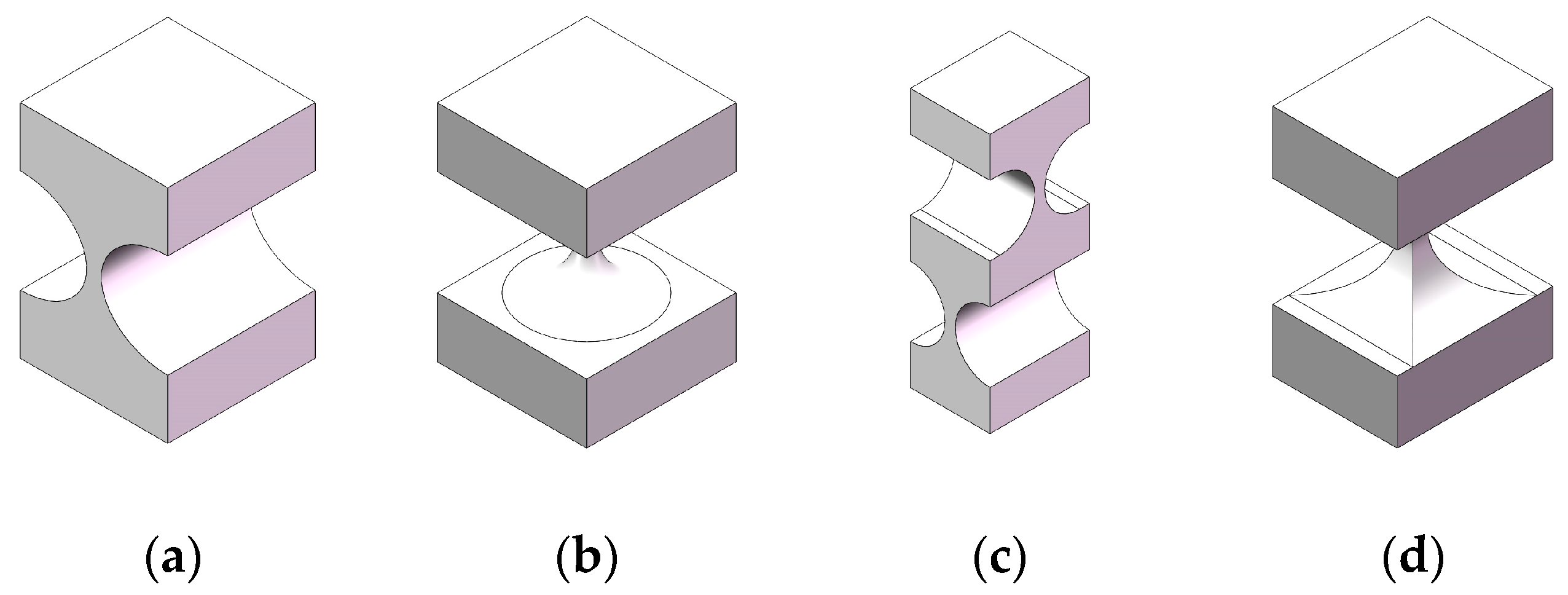
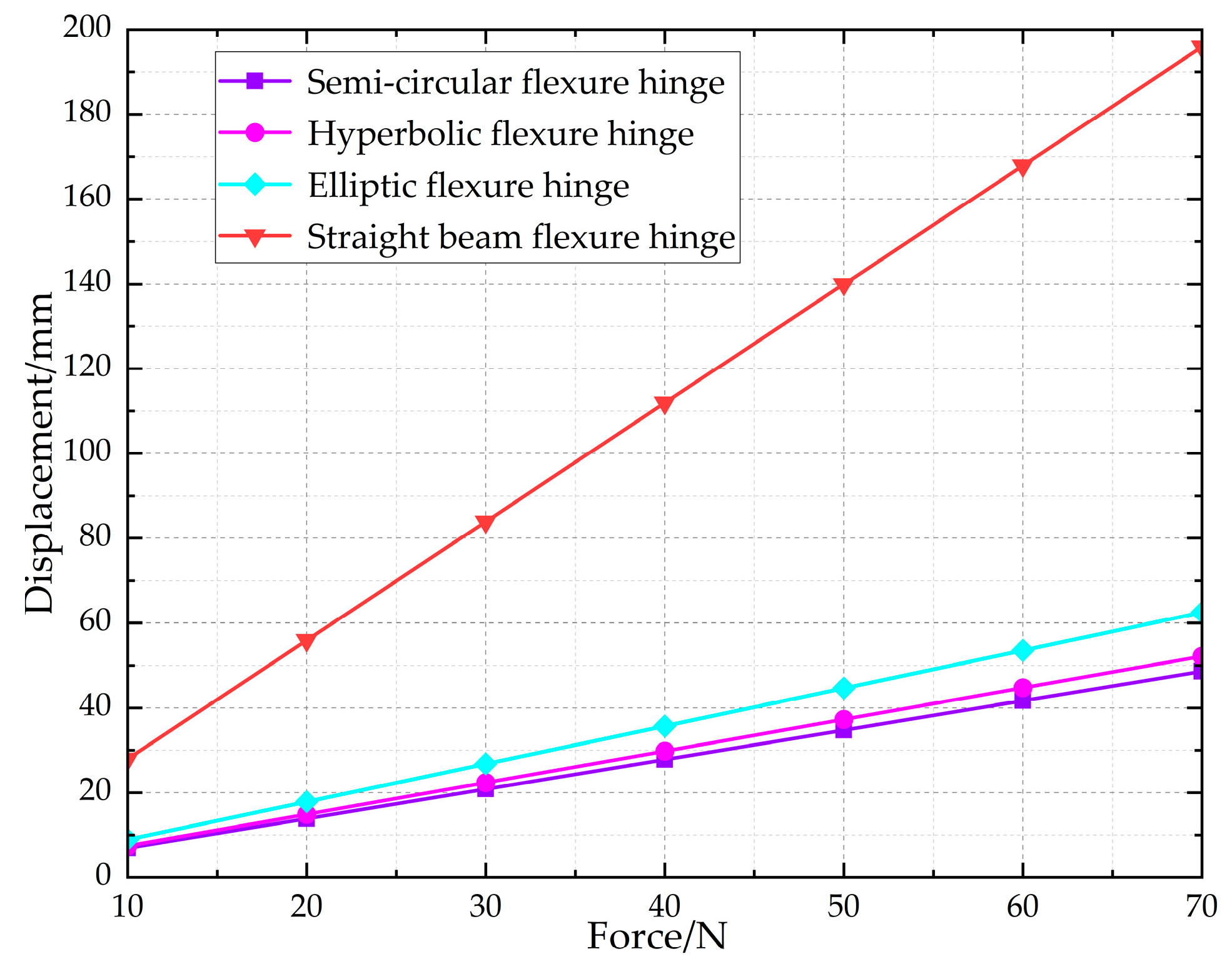
3.3. Design of the Flexible Hinge
4. Simulation Analysis and Experimental Verification of the Piezoelectric Drive Platform
4.1. Simulation Analysis of the Output Performance of the Piezoelectric Drive Platform
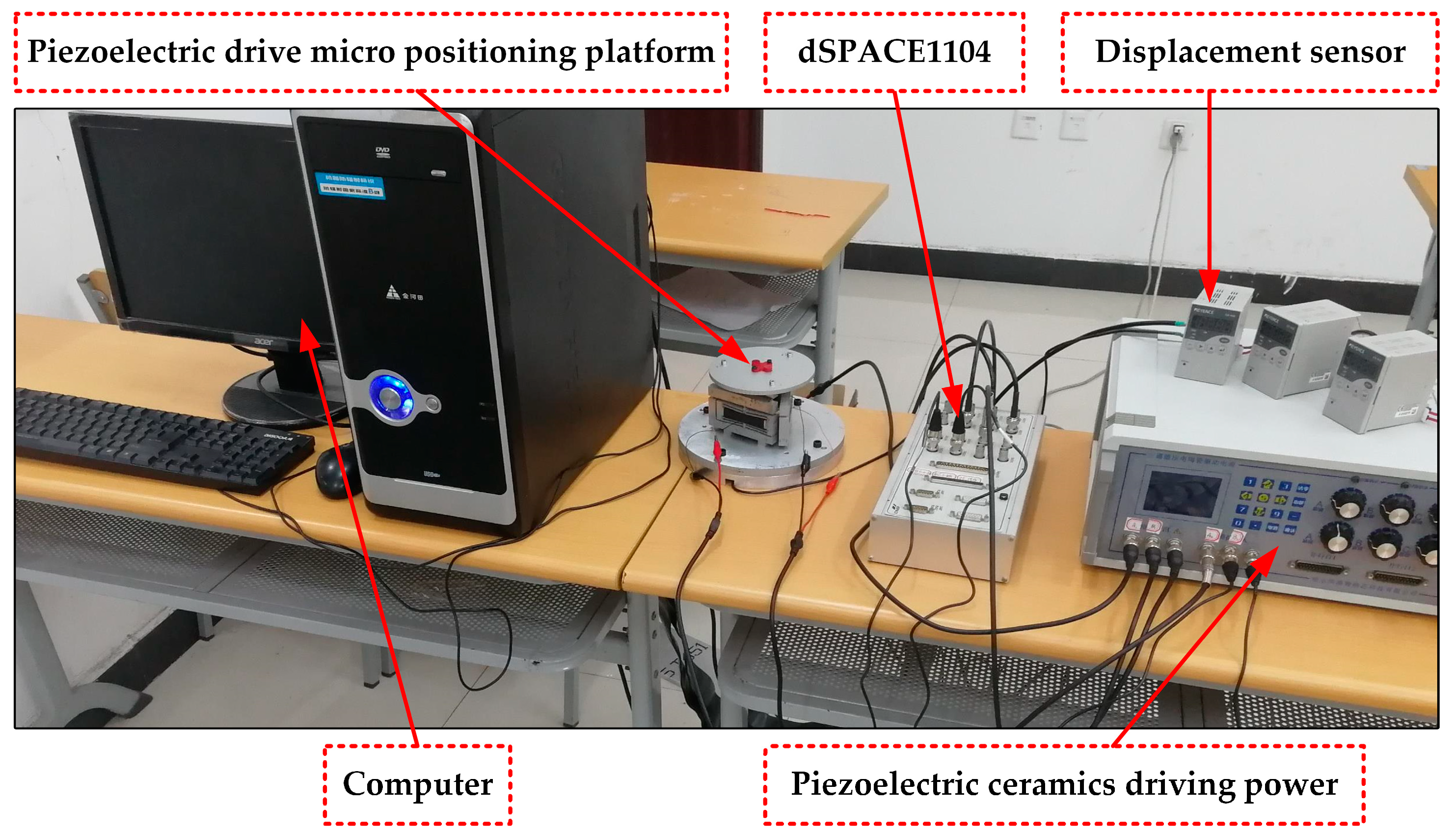
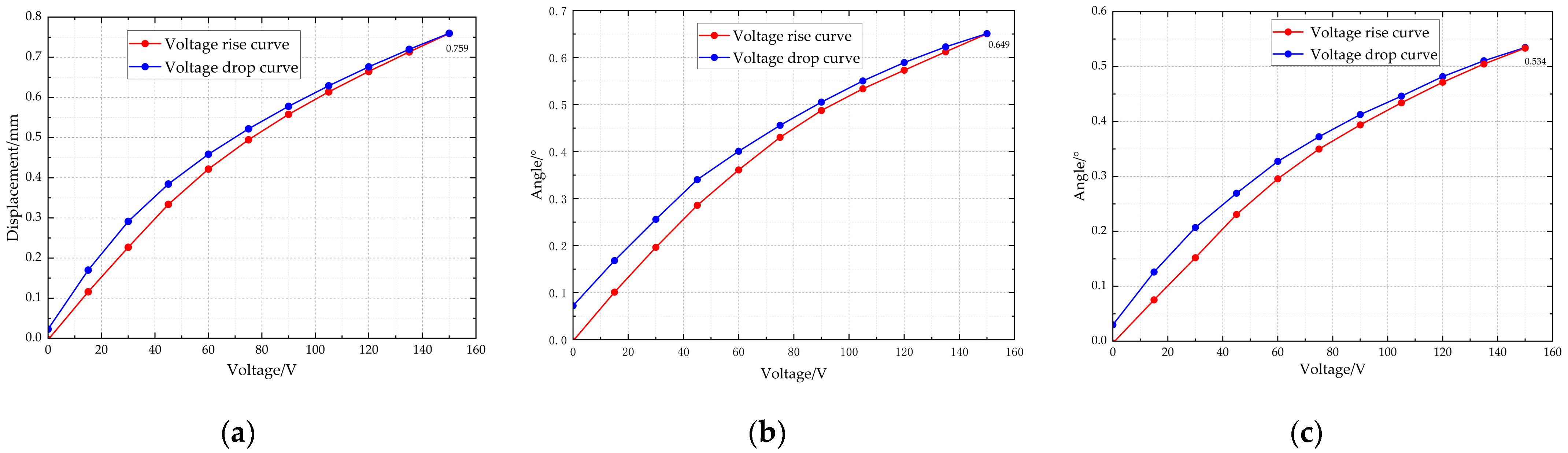
4.2. Piezoelectric Drive Platform Output Experiment
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mohith, S.; Upadhya, A.R.; Navin, K.P.; Kulkarni, S.M.; Rao, M. Recent trends in piezoelectric actuators for precision motion and their applications: A review. Smart Mater. Struct. 2021, 30, 013002. [Google Scholar] [CrossRef]
- Duan, Q.R.; Zheng, Y.J.; Jin, J.; Hu, N.D.; Zhang, Z.L.; Hu, H.P. Design and Experimental Study of a Stepping Piezoelectric Actuator with Large Stroke and High Speed. Micromachines 2023, 14, 267. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.X.; Deng, J.; Su, Q. Review on Multi-Degree-of-Freedom Piezoelectric Motion Stage. IEEE Access 2018, 6, 59986–60004. [Google Scholar] [CrossRef]
- Shi, Y.L.; Zhao, C.S. Simple new ultrasonic piezoelectric actuator for precision linear positioning. J. Electroceram. 2012, 28, 233–239. [Google Scholar] [CrossRef]
- Tian, X.Q.; Zhang, B.R.; Liu, Y.X.; Chen, S.; Yu, H.P. A novel U-shaped stepping linear piezoelectric actuator with two driving feet and low motion coupling: Design, modeling and experiments. Mech. Syst. Signal Process. 2019, 124, 679–695. [Google Scholar] [CrossRef]
- Berry, D.; Vo, T.V.K.; Li, K.H.H.; Lubecki, T.M.; Gupta, A. Progressing towards high performance non-resonant piezoelectric stepping actuators. Sens. Actuators A Phys. 2023, 358, 114439. [Google Scholar] [CrossRef]
- Chang, S.J.; Chen, J. Design and Fabrication of the Large Thrust Force Piezoelectric Actuator. Adv. Mater. Sci. Eng. 2013, 2013, 912587. [Google Scholar] [CrossRef]
- Delibas, B.; Koc, B. A Method to Realize Low Velocity Movability and Eliminate Friction Induced Noise in Piezoelectric Ultrasonic Motors. IEEE/ASME Trans. Mechatron. 2020, 25, 2677–2687. [Google Scholar] [CrossRef]
- Yu, Y.; Gao, Q.; Qiao, G.D.; Zhang, X.S.; Lu, X.H.; Cheng, T.H. A direction-guidance hybrid excitation method for inertial flexible hinge piezoelectric actuator with high speed performance. Sens. Actuators A Phys. 2020, 314, 112229. [Google Scholar] [CrossRef]
- Jin, H.N.; Gao, X.Y.; Ren, K.L.; Liu, J.F.; Qiao, L.; Liu, M.Z.; Chen, W.; He, Y.H.; Dong, S.X.; Xu, Z.; et al. Review on Piezoelectric Actuators Based on High-Performance Piezoelectric Materials. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2022, 69, 3057–3069. [Google Scholar] [CrossRef]
- Wu, Z.Y.; Xu, Q.S. Design, Fabrication, and Testing of a New Compact Piezo-Driven Flexure Stage for Vertical Micro/Nanopositioning. IEEE Trans. Autom. Sci. Eng. 2019, 16, 908–918. [Google Scholar] [CrossRef]
- Hussein, H.; Damdam, A.; Ren, L.J.; Charrouf, Y.O.; Challita, J.; Zwain, M.; Fariborzi, H. Actuation of Mobile Microbots: A Review. Adv. Intell. Syst. 2023, 5, 2300168. [Google Scholar] [CrossRef]
- Jia, B.T.; Wang, L.; Wang, R.F.; Jin, J.M.; Wu, D.W. Theoretical modeling and experimental investigation on a novel screwed-type piezoelectric focusing mechanism for space cameras. Mech. Syst. Signal Process. 2022, 171, 108844. [Google Scholar] [CrossRef]
- Shivashankar, P.; Gopalakrishnan, S. Review on the use of piezoelectric materials for active vibration, noise, and flow control. Smart Mater. Struct. 2020, 29, 053001. [Google Scholar] [CrossRef]
- Shao, Y.; Xu, M.L.; Song, S.Y.; Tian, Z.; Shao, S.B. Modeling and experiment of an inertial piezoelectric rotary actuator. Int. J. Appl. Electromagn. Mech. 2019, 59, 309–316. [Google Scholar] [CrossRef]
- Liu, Y.T. Recent Development of Piezoelectric Fast Tool Servo (FTS) for Precision Machining. Int. J. Precis. Eng. Manuf. 2024, 25, 851–874. [Google Scholar] [CrossRef]
- Lu, Y.; Chen, C.Z.; Zhu, J.Q. Design of a Focusing Mechanism Actuated by Piezoelectric Ceramics for TMA Telescope. Sensors 2023, 23, 4610. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.L.; Wei, Y.D.; Lou, J.Q.; Fu, L.; Fang, S. Design and control of a multi-DOF micromanipulator dedicated to multiscale micromanipulation. Smart Mater. Struct. 2017, 26, 115016. [Google Scholar] [CrossRef]
- Gao, X.Y.; Yang, J.K.; Wu, J.G.; Xin, X.D.; Li, Z.M.; Yuan, X.T.; Shen, X.Y.; Dong, S.X. Piezoelectric Actuators and Motors: Materials, Designs, and Applications. Adv. Mater. Technol. 2020, 5, 1900716. [Google Scholar] [CrossRef]
- Li, J.P.; Huang, H.; Morita, T. Stepping piezoelectric actuators with large working stroke for nano-positioning systems: A review. Sens. Actuators A Phys. 2019, 292, 39–51. [Google Scholar] [CrossRef]
- Wang, S.P.; Rong, W.B.; Wang, L.F.; Xie, H.; Sun, L.N.; Mills, J.K. A survey of piezoelectric actuators with long working stroke in recent years: Classifications, principles, connections and distinctions. Mech. Syst. Signal Process. 2019, 123, 591–605. [Google Scholar] [CrossRef]
- Li, J.; Che, F.; Deng, J.; Chen, W.S.; Liu, J.K.; Liu, Y.X. A linear ultrasonic motor with a hollowed and symmetrical stator. Int. J. Mech. Sci. 2024, 262, 108718. [Google Scholar] [CrossRef]
- Wang, L.; Liu, J.K.; Liu, Y.X.; Tian, X.Q.; Yan, J.P. A novel single-mode linear piezoelectric ultrasonic motor based on asymmetric structure. Ultrasonics 2018, 89, 137–142. [Google Scholar] [CrossRef] [PubMed]
- Yan, J.P.; Liu, Y.X.; Liu, J.K.; Xu, D.M.; Chen, W.S. The design and experiment of a novel ultrasonic motor based on the combination of bending modes. Ultrasonics 2016, 71, 205–210. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.F.; Gao, X.Y.; Jin, H.N.; Ren, K.L.; Guo, J.Y.; Qiao, L.; Qiu, C.R.; Chen, W.; He, Y.H.; Dong, S.X.; et al. Miniaturized electromechanical devices with multi-vibration modes achieved by orderly stacked structure with piezoelectric strain units. Nat. Commun. 2022, 13, 6567. [Google Scholar] [CrossRef] [PubMed]
- Hunstig, M. Piezoelectric Inertia MotorsA Critical Review of History, Concepts, Design, Applications, and Perspectives. Actuators 2017, 6, 7. [Google Scholar] [CrossRef]
- Huang, H.H.; Wang, L.F.; Wu, Y. Design and Experimental Research of a Rotary Micro-Actuator Based on a Shearing Piezoelectric Stack. Micromachines 2019, 10, 96. [Google Scholar] [CrossRef]
- Zeng, P.; Sun, S.J.; Li, L.; Xu, F.; Cheng, G.M. Design and testing of a novel piezoelectric micro-motor actuated by asymmetrical inertial impact driving principle. Rev. Sci. Instrum. 2014, 85, 035002. [Google Scholar] [CrossRef] [PubMed]
- Sun, W.X.; Xu, Z.; Wang, K.F.; Li, X.; Tang, J.Y.; Yang, Z.J.; Huang, H. An Impact Inertial Piezoelectric Actuator Designed by Means of the Asymmetric Friction. IEEE Trans. Ind. Electron. 2023, 70, 699–708. [Google Scholar] [CrossRef]
- Zhang, S.J.; Liu, Y.X.; Deng, J.; Tian, X.Q.; Gao, X. Development of a two-DOF inertial rotary motor using a piezoelectric actuator constructed on four bimorphs. Mech. Syst. Signal Process. 2021, 149, 107213. [Google Scholar] [CrossRef]
- Koc, B.; Delibas, B. Impact Force Analysis in Inertia-Type Piezoelectric Motors. Actuators 2023, 12, 52. [Google Scholar] [CrossRef]
- Wang, L.; Chen, W.S.; Liu, J.K.; Deng, J.; Liu, Y.X. A review of recent studies on non-resonant piezoelectric actuators. Mech. Syst. Signal Process. 2019, 133, 106254. [Google Scholar] [CrossRef]
- Ma, X.F.; Liu, Y.X.; Deng, J.; Gao, X.; Cheng, J.F. A compact inchworm piezoelectric actuator with high speed: Design, modeling, and experimental evaluation. Mech. Syst. Signal Process. 2023, 184, 109704. [Google Scholar] [CrossRef]
- Bai, D.; Deng, S.L.; Li, Y.T.; Li, H. A novel inchworm piezoelectric actuator with rhombic amplification mechanism. Sens. Actuators A Phys. 2023, 360, 114515. [Google Scholar] [CrossRef]
- Yu, S.M.; Liang, J.Y.; Yang, F.; Wang, H.T.; Liu, X.L.; Xu, C.; Wang, Z.; Xu, D.M. A novel inchworm piezoelectric actuator using two-stage amplification mechanism with high speed: Design, modeling, and experimental evaluation. Smart Mater. Struct. 2023, 32, 055020. [Google Scholar] [CrossRef]
- Schlinquer, T.; Homayouni-Amlashi, A.; Rakotondrabe, M.; Mohand-Ousaid, A. Design of Piezoelectric Actuators By Optimizing the Electrodes Topology. IEEE Rob. Autom. Lett. 2021, 6, 72–79. [Google Scholar] [CrossRef]
- Li, Z.; Su, Z.R.; Zhao, L.; Han, H.T.; Guo, Z.Y.; Zhao, Y.Y.; Sun, H.X. Design and Locomotion Study of Stick-Slip Piezoelectric Actuator Using Two-Stage Flexible Hinge Structure. Micromachines 2021, 12, 154. [Google Scholar] [CrossRef] [PubMed]
- Huang, W.Q.; Lian, J.K.; Chen, M.Y.; An, D.W. Bidirectional Active Piezoelectric Actuator Based on Optimized Bridge-Type Amplifier. Micromachines 2021, 12, 1013. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Zhao, J.G.; Shen, X.; Xiao, Q.; Huang, J.; Wang, Y. Design, Modeling, and Testing of a Novel XY Piezo-Actuated Compliant Micro-Positioning Stage. Micromachines 2019, 10, 581. [Google Scholar] [CrossRef]
- Sun, F.; Hao, Y.S.; Xu, F.C.; Jin, J.J.; Li, Q.; Tong, L.; Zhang, M.; Zhang, X.Y. Proposal of an Equal-Stiffness and Equal-Stroke 2D Micro-Positioning Platform Driven by Piezoelectric Actuators. Actuators 2020, 9, 47. [Google Scholar] [CrossRef]
- Na, T.W.; Choi, J.H.; Jung, J.Y.; Kim, H.G.; Han, J.H.; Park, K.C.; Oh, I.K. Compact piezoelectric tripod manipulator based on a reverse bridge-type amplification mechanism. Smart Mater. Struct. 2016, 25, 095028. [Google Scholar] [CrossRef]
- Cui, F.N.; Li, Y.M.; Qian, J.N. Development of a 3-DOF Flexible Micro-Motion Platform Based on a New Compound Lever Amplification Mechanism. Micromachines 2021, 12, 686. [Google Scholar] [CrossRef]
- Iqbal, S.; Malik, A. A review on MEMS based micro displacement amplification mechanisms. Sens. Actuators A Phys. 2019, 300, 111666. [Google Scholar] [CrossRef]
- Wei, H.X.; Tian, Y.L.; Zhao, Y.J.; Ling, M.X.; Shirinzadeh, B. Two-axis flexure hinges with variable elliptical transverse cross-sections. Mech. Mach. Theory 2023, 181, 105183. [Google Scholar] [CrossRef]
- Yan, L.; Jiang, A.N.; Jiang, F.; Liu, G.D.; Wang, F.Z.; Wu, X. Design and Performance Analysis of a Micro-Displacement Worktable Based on Flexure Hinges. Micromachines 2022, 13, 518. [Google Scholar] [CrossRef] [PubMed]
- Qiu, L.F.; Liu, Y.S.; Yu, Y.; Bai, Y.T.B. Design and stiffness analysis of a pitch-varying folded flexure hinge (PFFH). Mech. Mach. Theory 2021, 157, 104187. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Type | Young’s Modulus (GPa) | Yield Strength (MPa) | Density (g/cm3) | Poisson Ratio |
|---|---|---|---|---|
| Aluminum (7075-T651) | 72 | 500 | 2.81 | 0.33 |
| Steel (1010) | 207 | 179 | 7.9 | 0.3 |
| Titanium alloy (Ti-13) | 113 | 1170 | 4.5 | 0.33 |
| Beryllium bronze (CA170) | 128 | 1170 | 8.3 | 0.35 |
| Output Direction | Simulation Result | Experimental Result | Maximum Error | Relative Error |
|---|---|---|---|---|
| Z-axis displacement | 804 μm | 759 μm | 64 μm | 5.6% |
| Rotation direction around the x-axis | 0.665° | 0.649° | 0.016° | 2.4% |
| Rotation direction around the y-axis | 0.572° | 0.534° | 0.038° | 6.6% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, C.; Li, Z.; Xu, F.; Zhang, H.; Sun, F.; Jin, J.; Zhang, X.; Yang, L. Design of a Novel Three-Degree-of-Freedom Piezoelectric-Driven Micro-Positioning Platform with Compact Structure. Actuators 2024, 13, 248. https://doi.org/10.3390/act13070248
Zhao C, Li Z, Xu F, Zhang H, Sun F, Jin J, Zhang X, Yang L. Design of a Novel Three-Degree-of-Freedom Piezoelectric-Driven Micro-Positioning Platform with Compact Structure. Actuators. 2024; 13(7):248. https://doi.org/10.3390/act13070248
Chicago/Turabian StyleZhao, Chuan, Zhenlong Li, Fangchao Xu, Hongkui Zhang, Feng Sun, Junjie Jin, Xiaoyou Zhang, and Lijian Yang. 2024. "Design of a Novel Three-Degree-of-Freedom Piezoelectric-Driven Micro-Positioning Platform with Compact Structure" Actuators 13, no. 7: 248. https://doi.org/10.3390/act13070248
APA StyleZhao, C., Li, Z., Xu, F., Zhang, H., Sun, F., Jin, J., Zhang, X., & Yang, L. (2024). Design of a Novel Three-Degree-of-Freedom Piezoelectric-Driven Micro-Positioning Platform with Compact Structure. Actuators, 13(7), 248. https://doi.org/10.3390/act13070248