


Comparative Experimental Study on the De-Icing Performance of Multiple Actuators

Abstract
1. Introduction
2. Materials and Methods
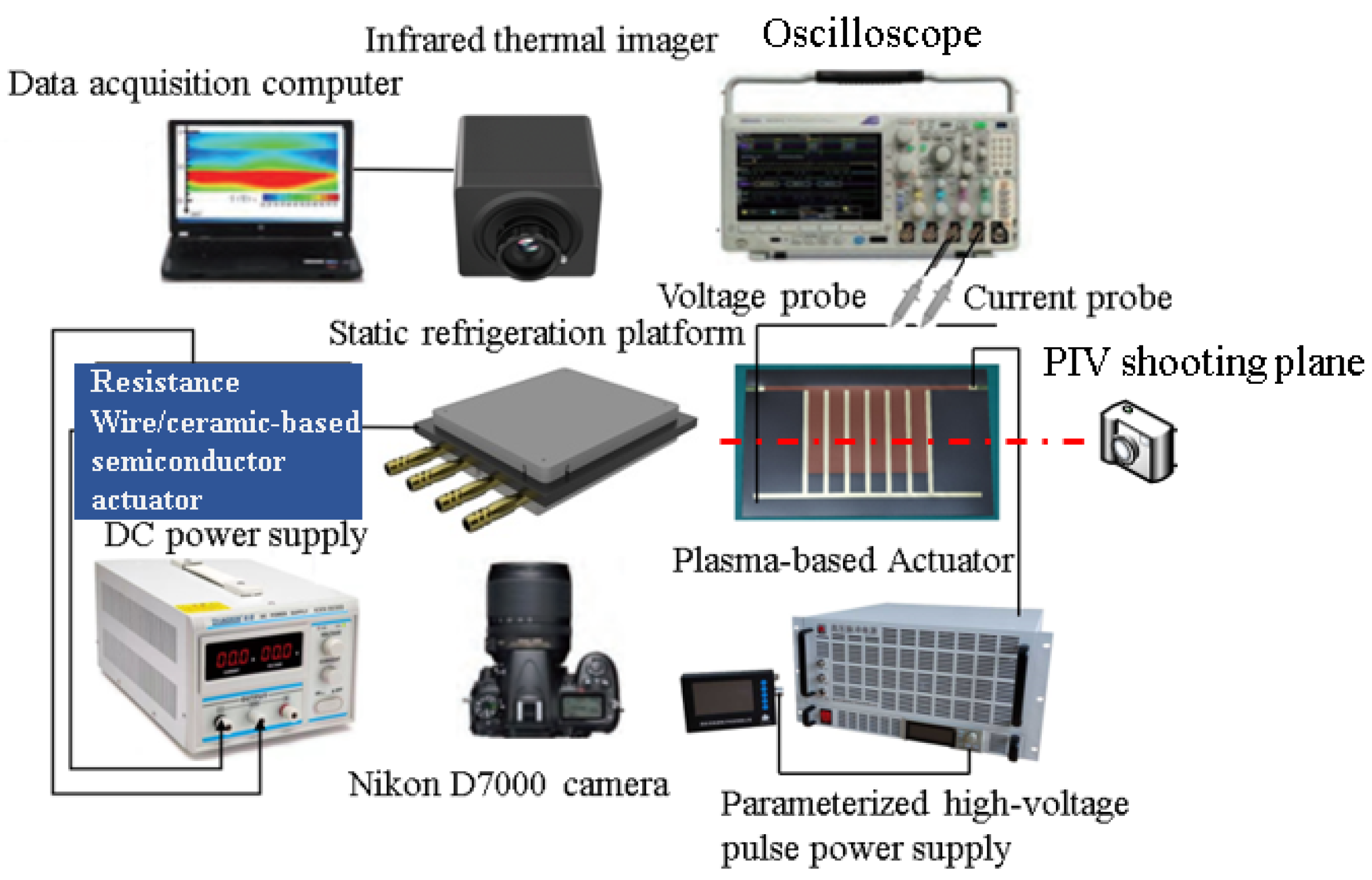
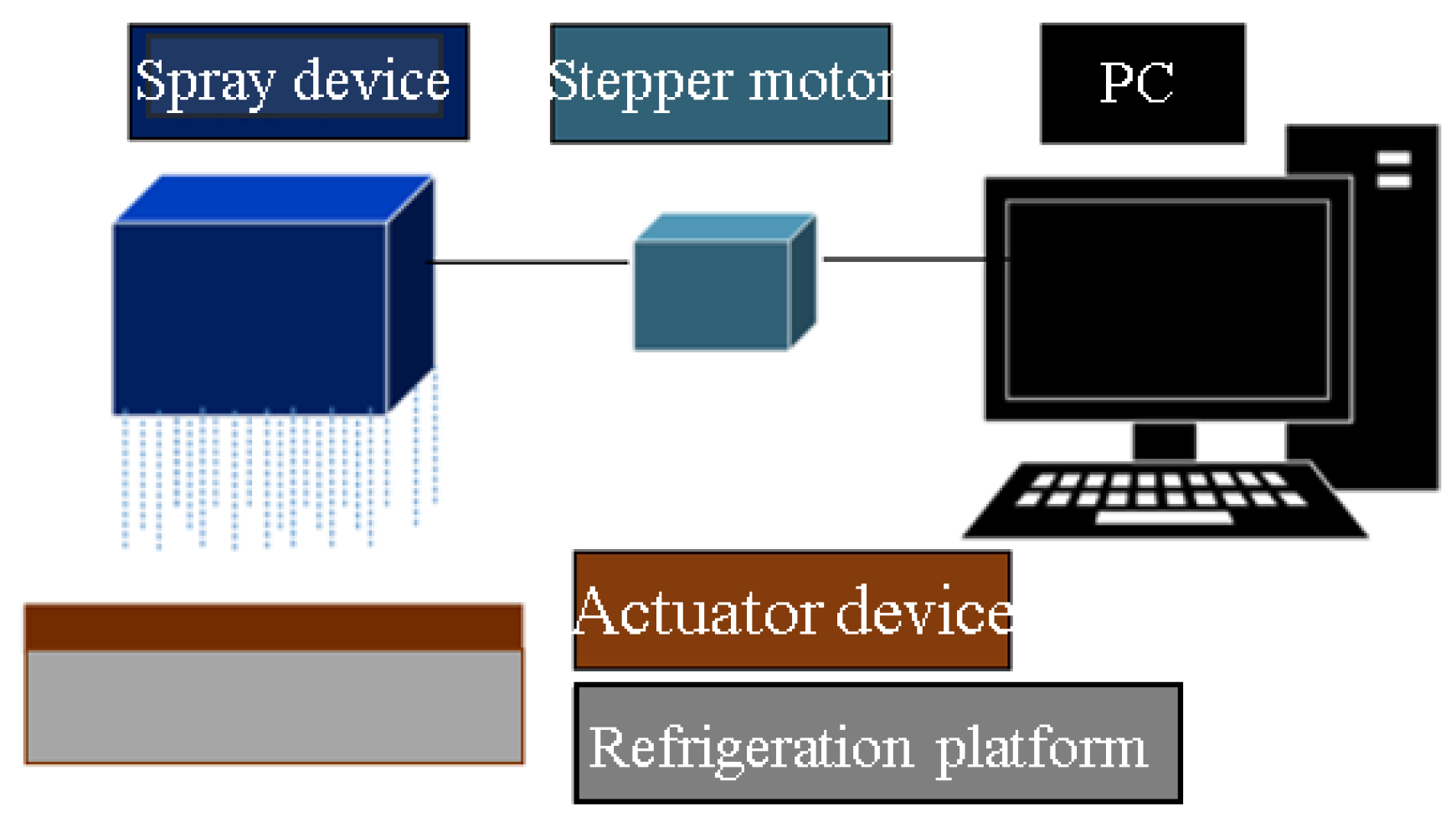
2.1. Data Collection System
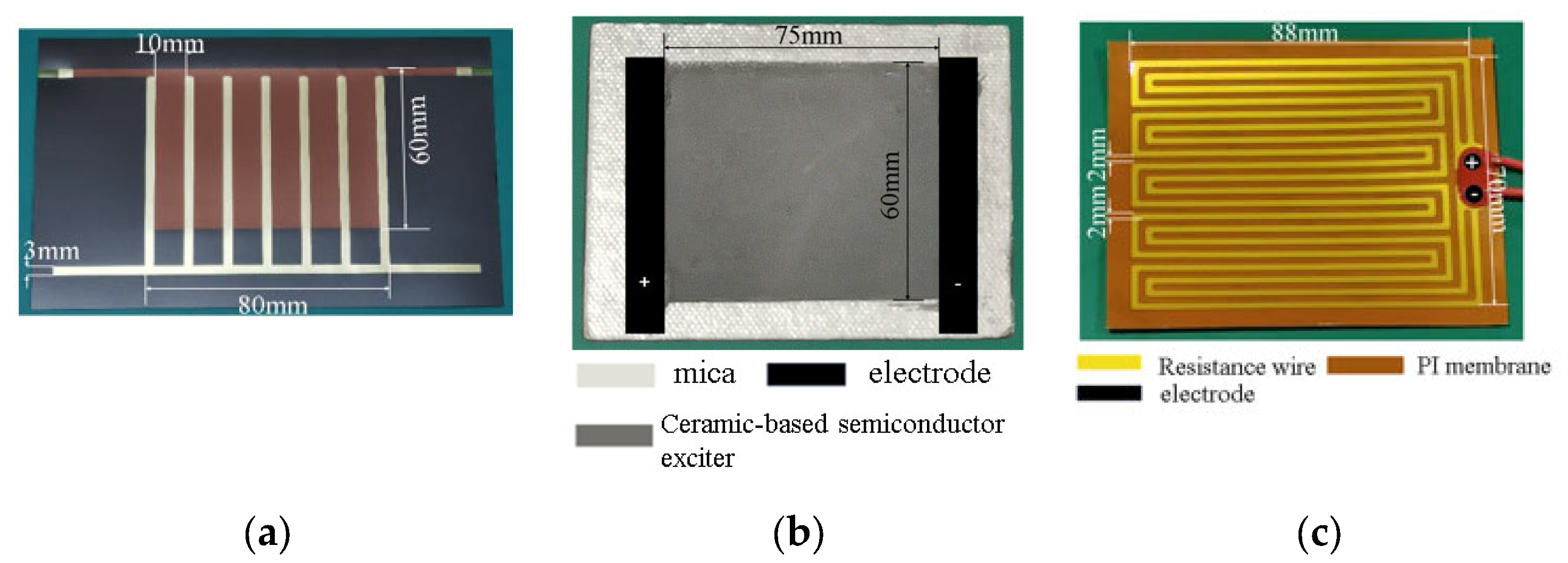
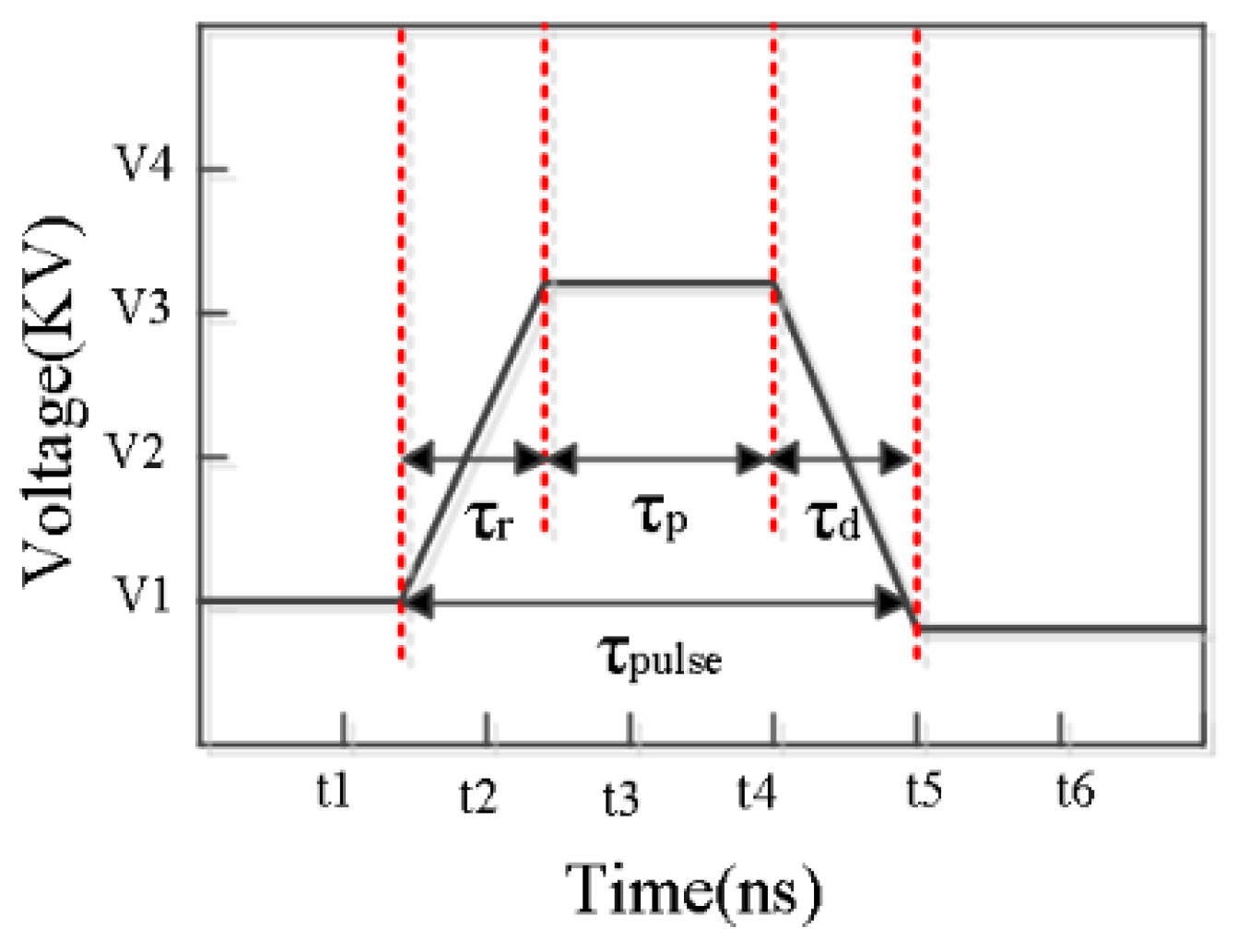
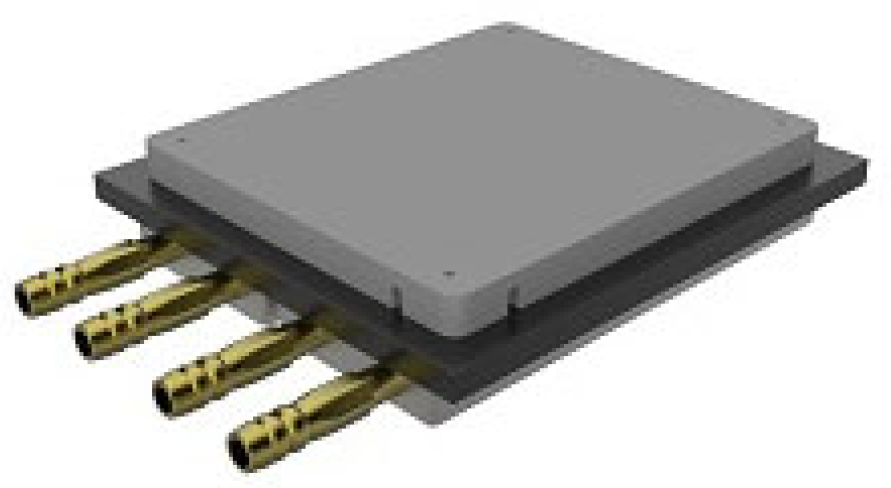
2.2. Actuators and Power Supplies
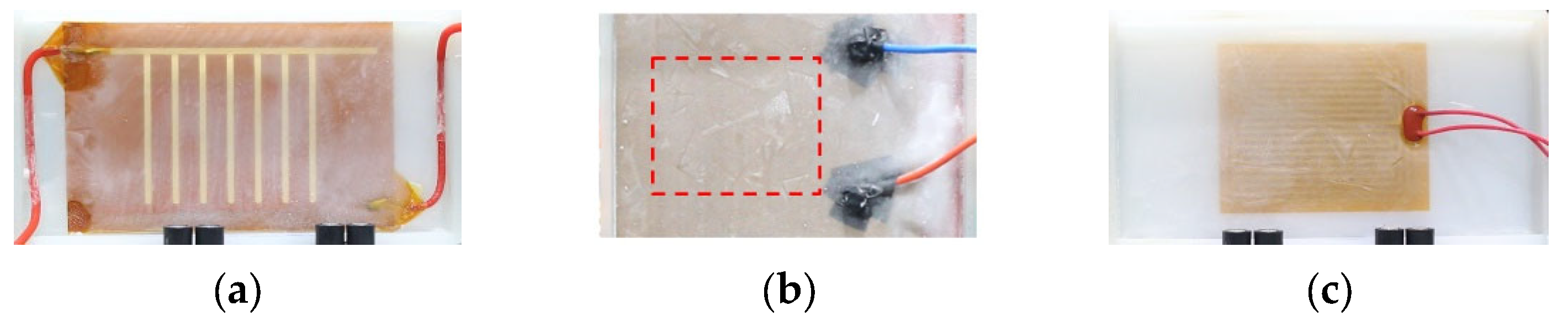
2.3. Ice-Making System
3. Results
3.1. Typical Power Density Selection
3.2. Research on the De-Icing Performance of the Actuator
3.2.1. Research on the Thermal Characteristics and Static De-Icing Characteristics of Plasma Actuators at Room Temperature
3.2.2. Research on Room Temperature Thermal Characteristics and Static De-Icing Characteristics of Ceramic-Based Semiconductor Actuators
3.2.3. Research on Room Temperature Thermal Characteristics and Static De-Icing Characteristics of Resistance Wire Actuators
3.3. Comparative Study of Room-Temperature Thermal Characteristics of Various Actuators
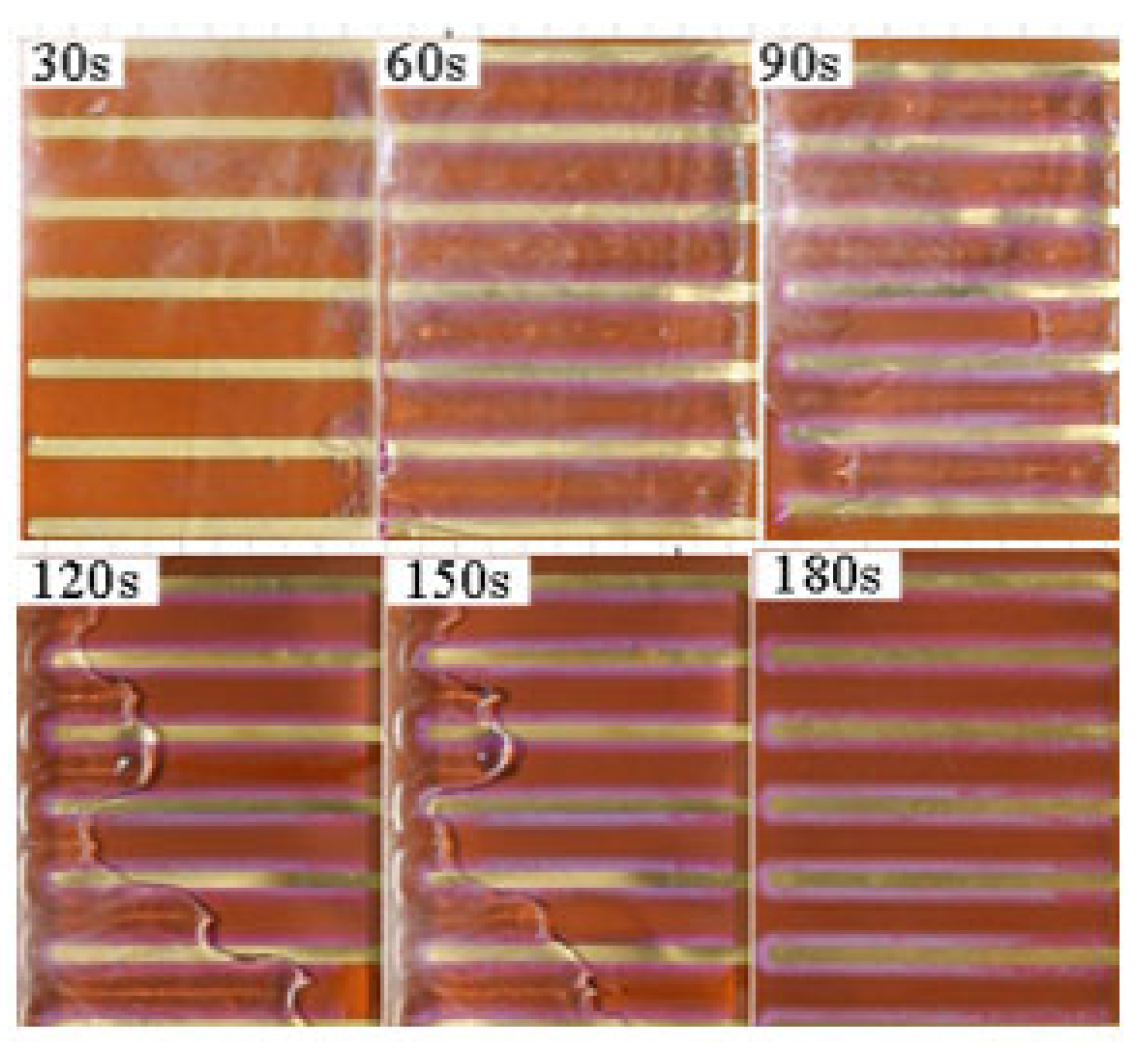
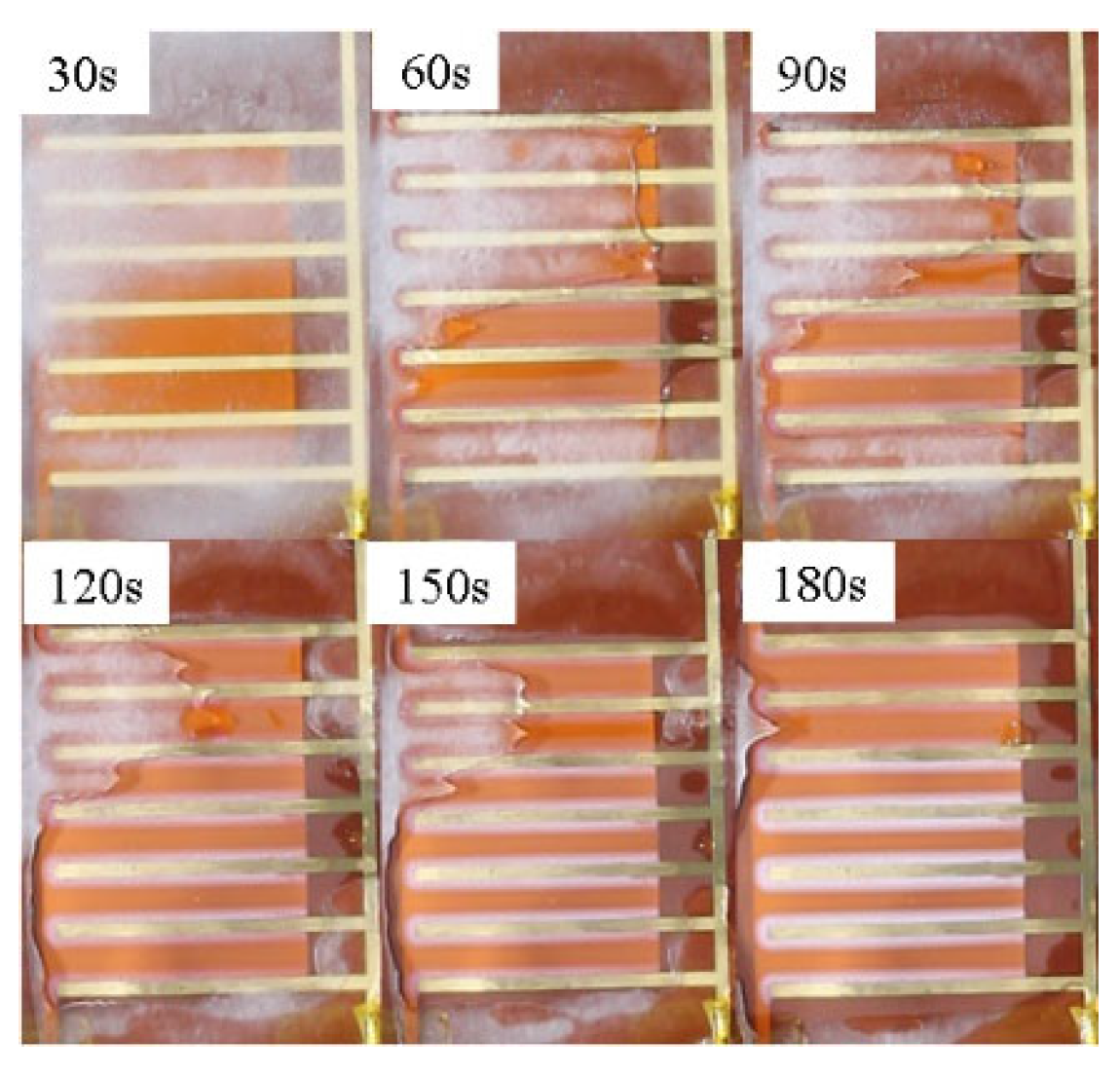
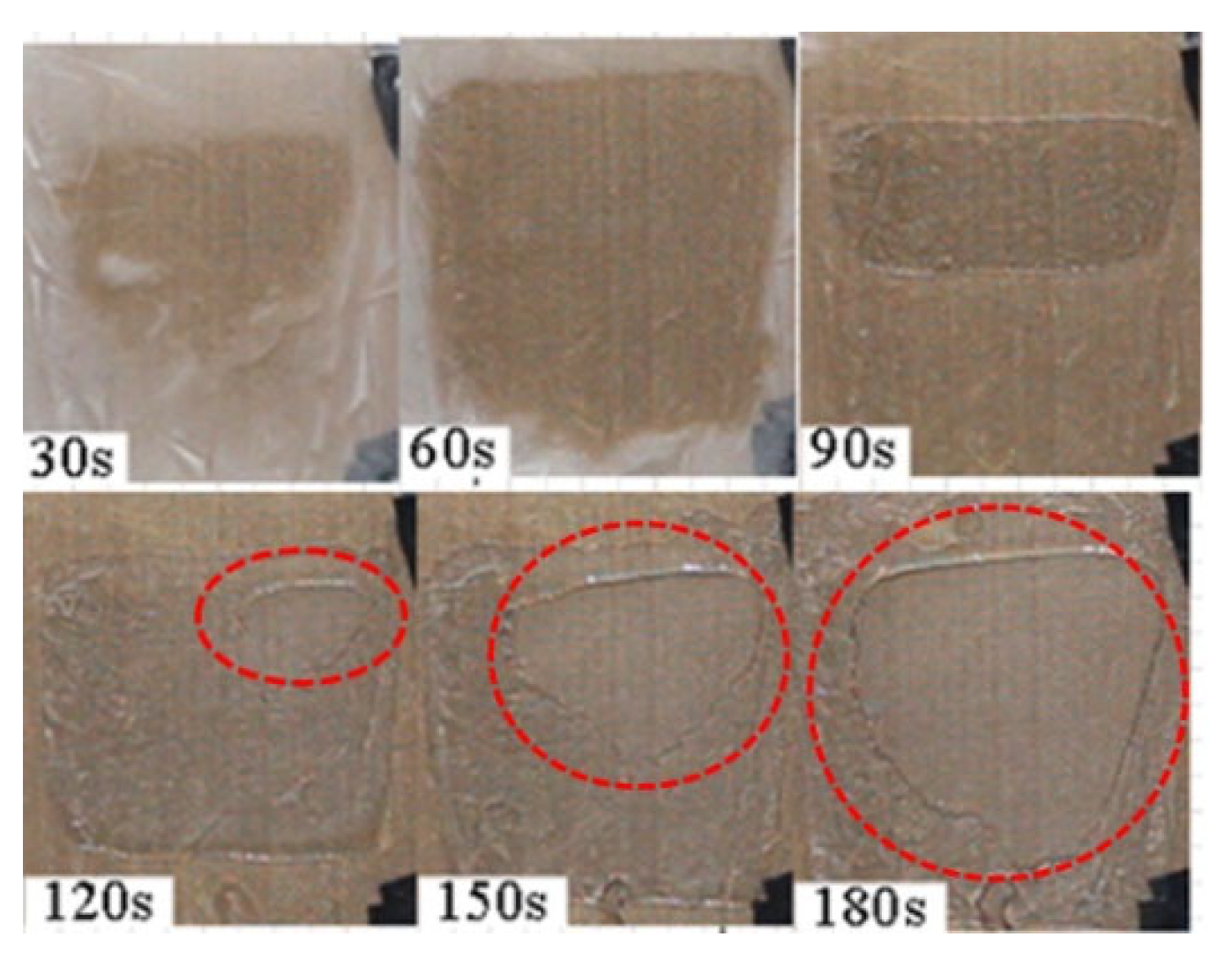
3.4. Comparison of De-Icing Characteristics of Various Materials under Ice Conditions
4. Discussion
- (1)
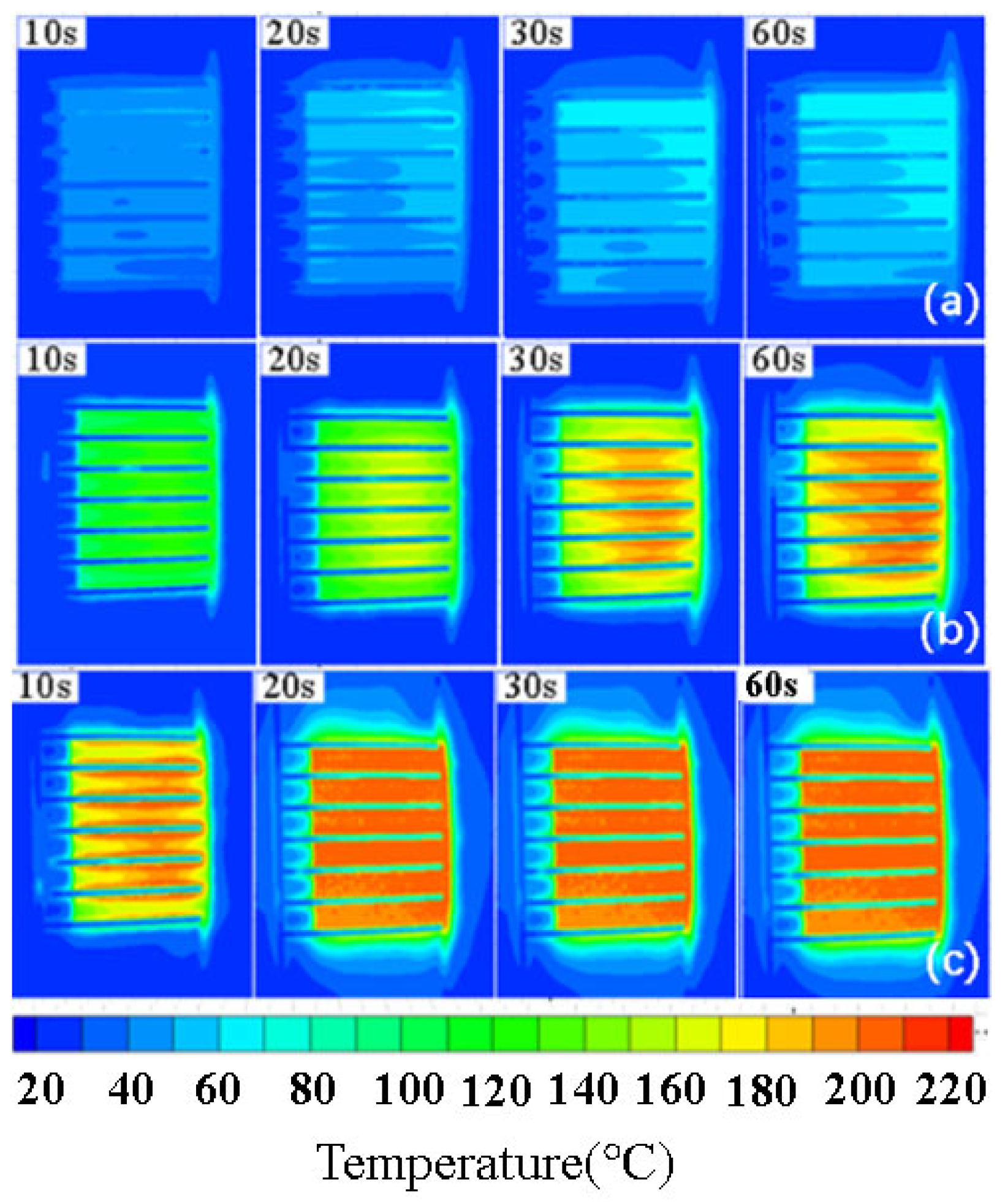
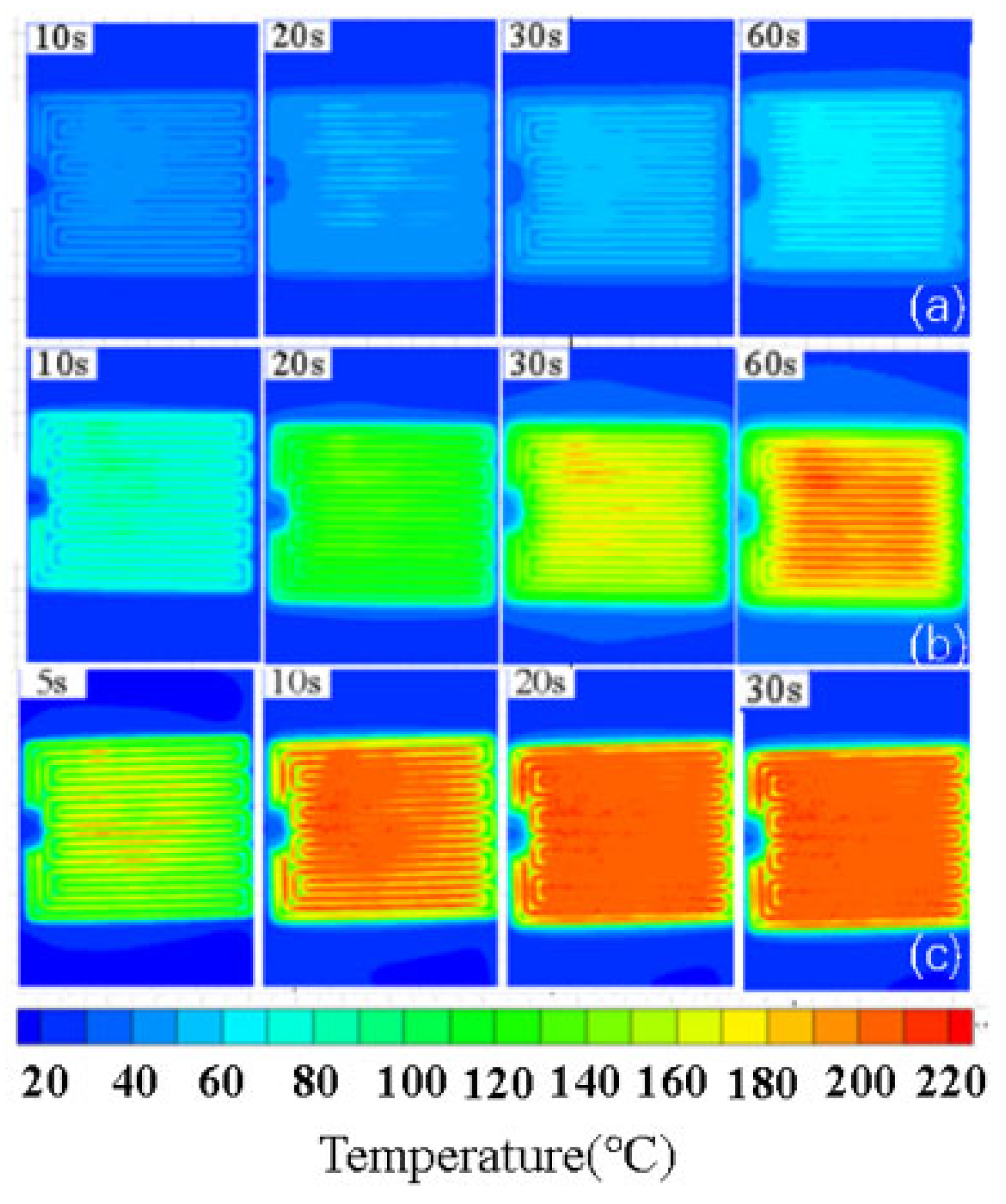
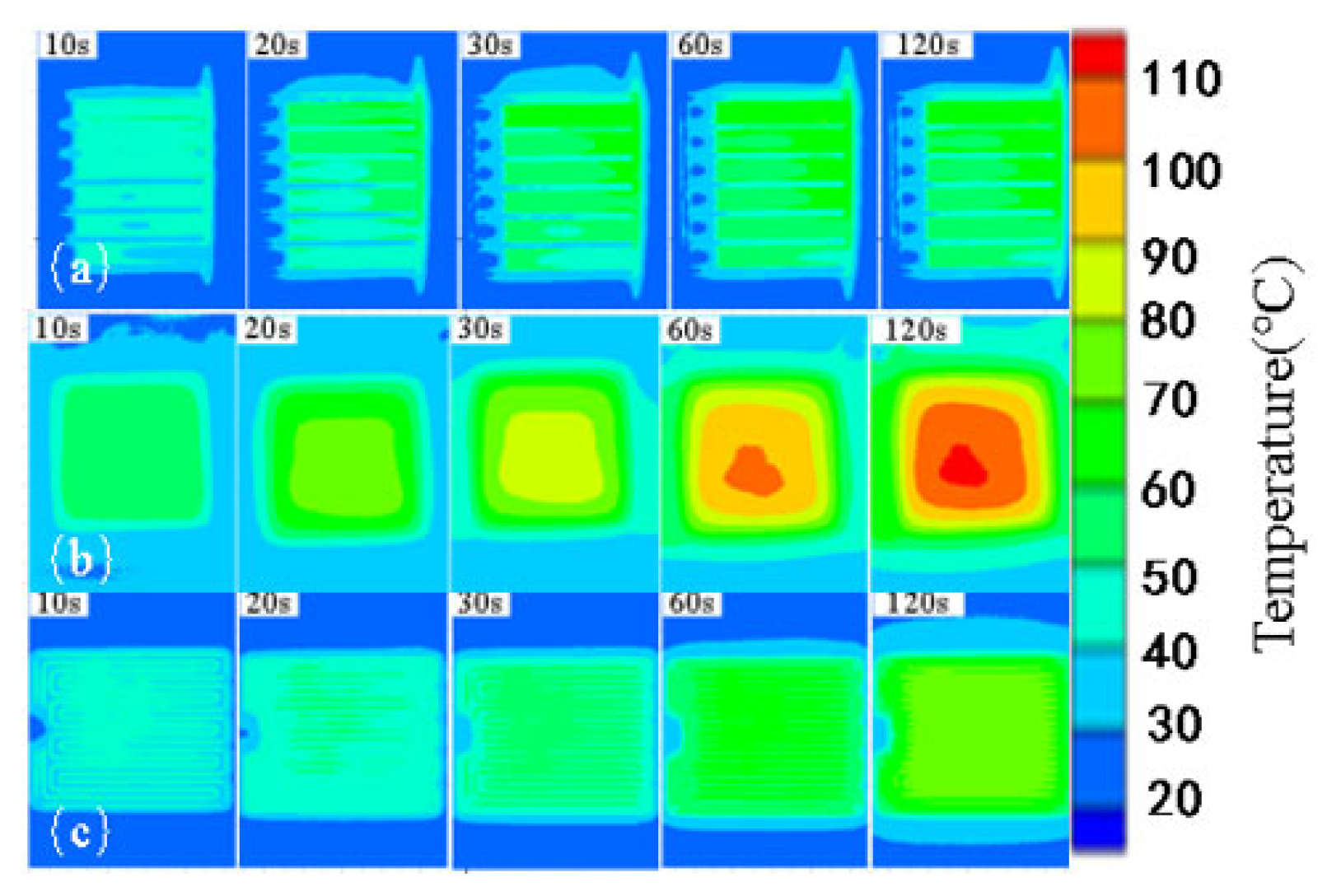
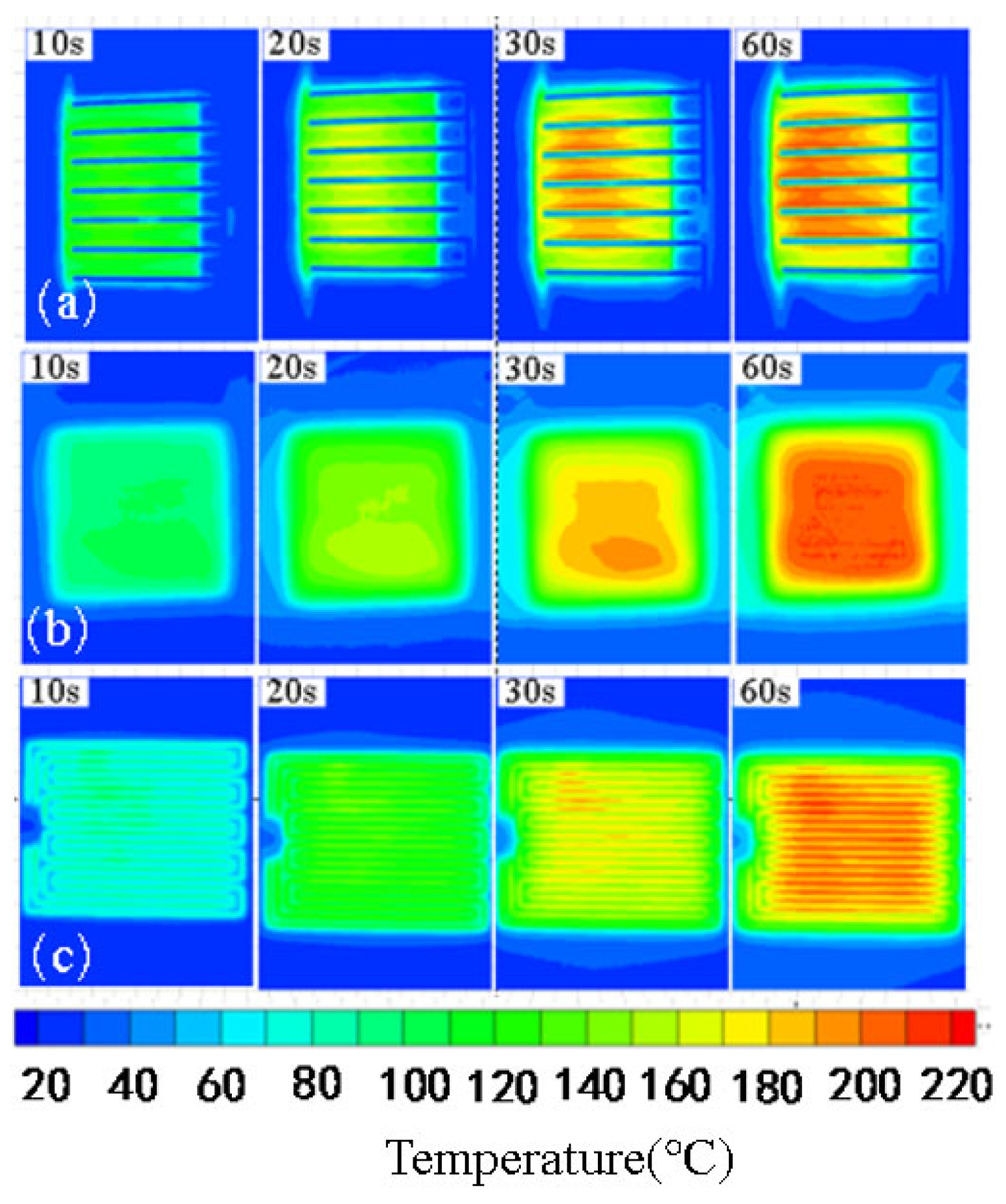
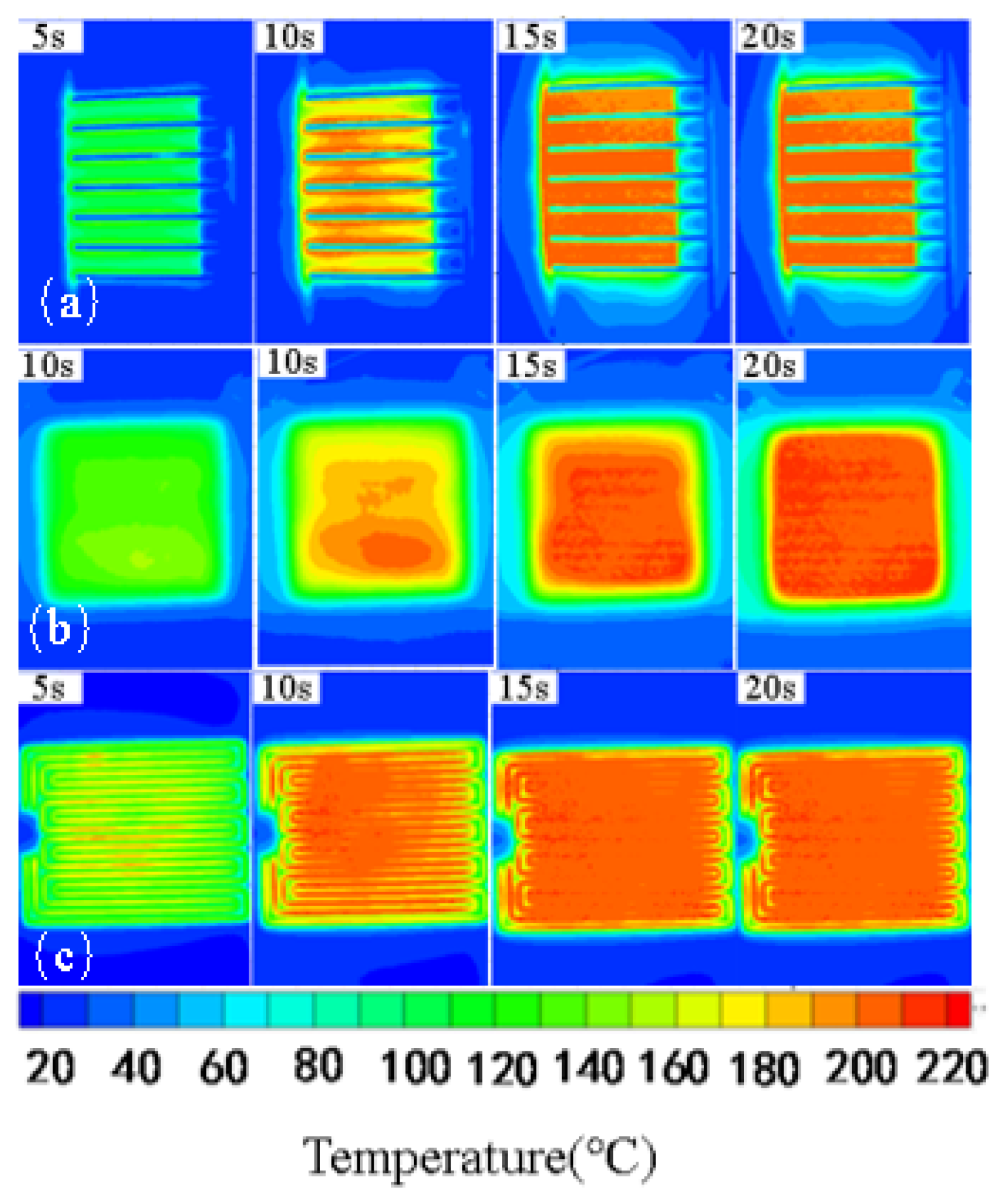
- The analysis of the infrared thermal images of the three actuators across different power densities reveals that all can achieve thermal equilibrium temperatures exceeding 210 °C with increasing power density. The heating distribution of the plasma actuator is non-uniform, predominantly concentrated near the anode. In contrast, the resistance wire actuator displays distinct high- and low-temperature zones, leading to lower heat transfer efficiency. Conversely, the ceramic-based semiconductor actuator exhibits a gradual temperature decrease from the center to the circumference of the heating area. Once thermal equilibrium is reached, the high-temperature distribution becomes uniform across the entire heating area.
- (2)
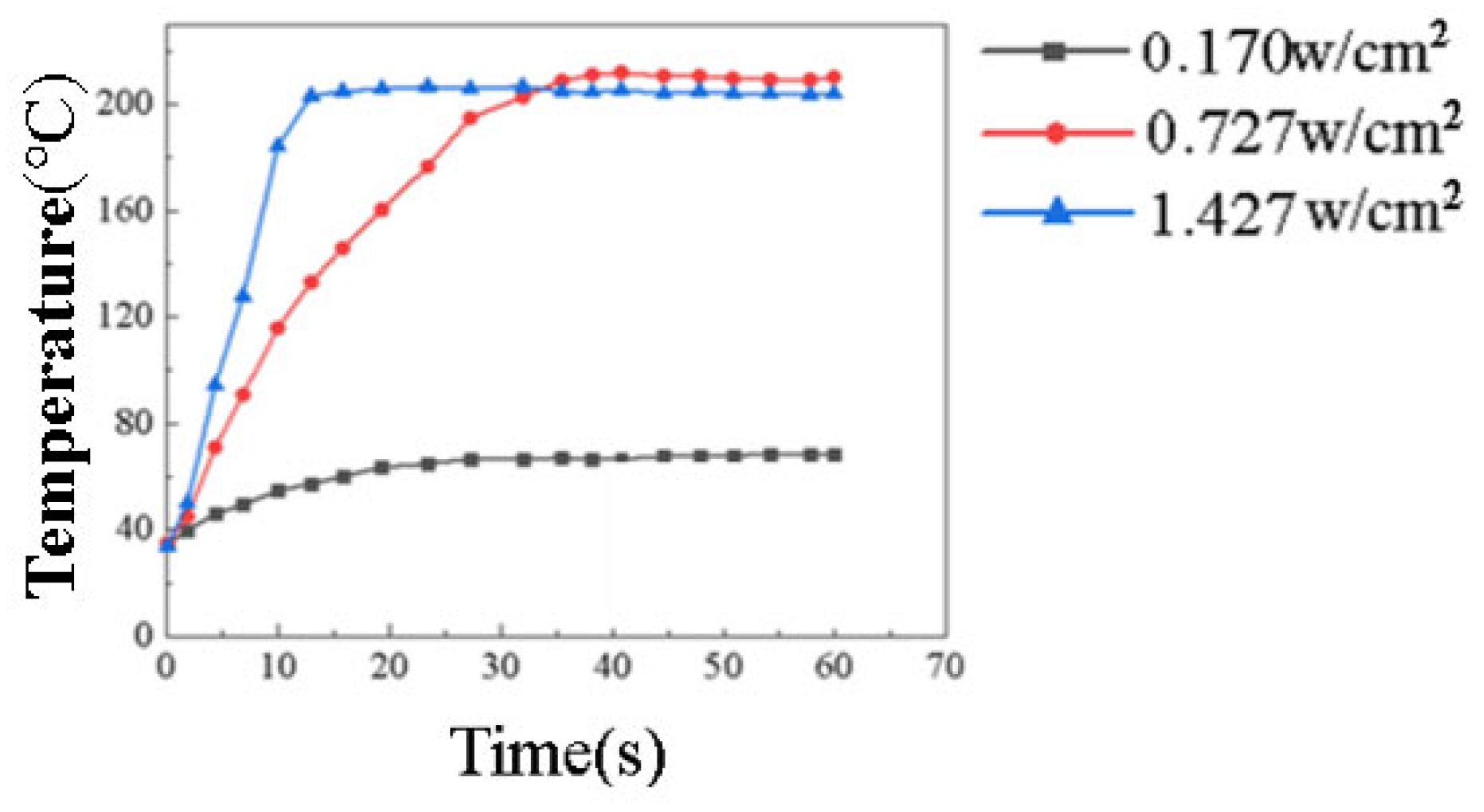
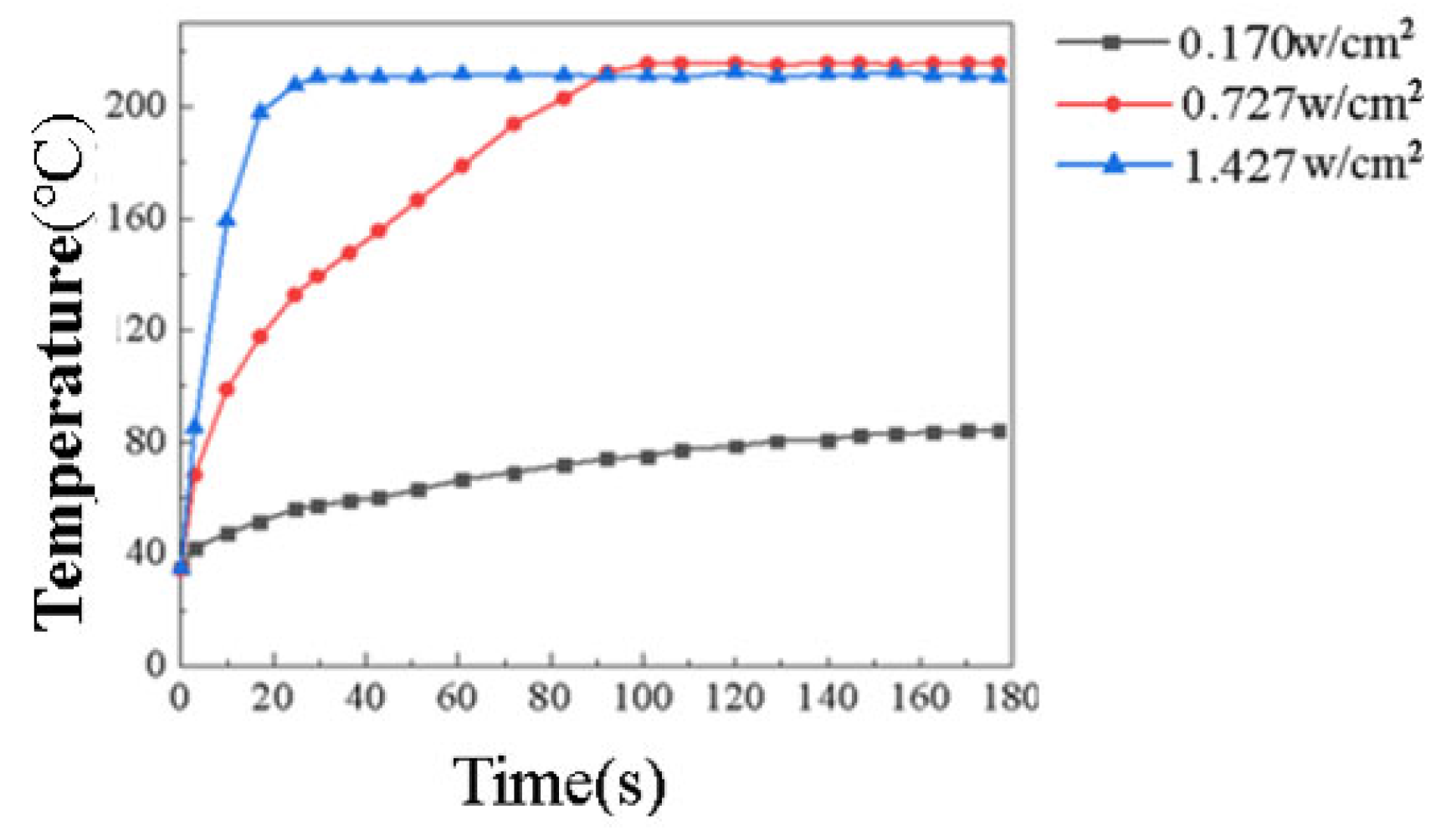
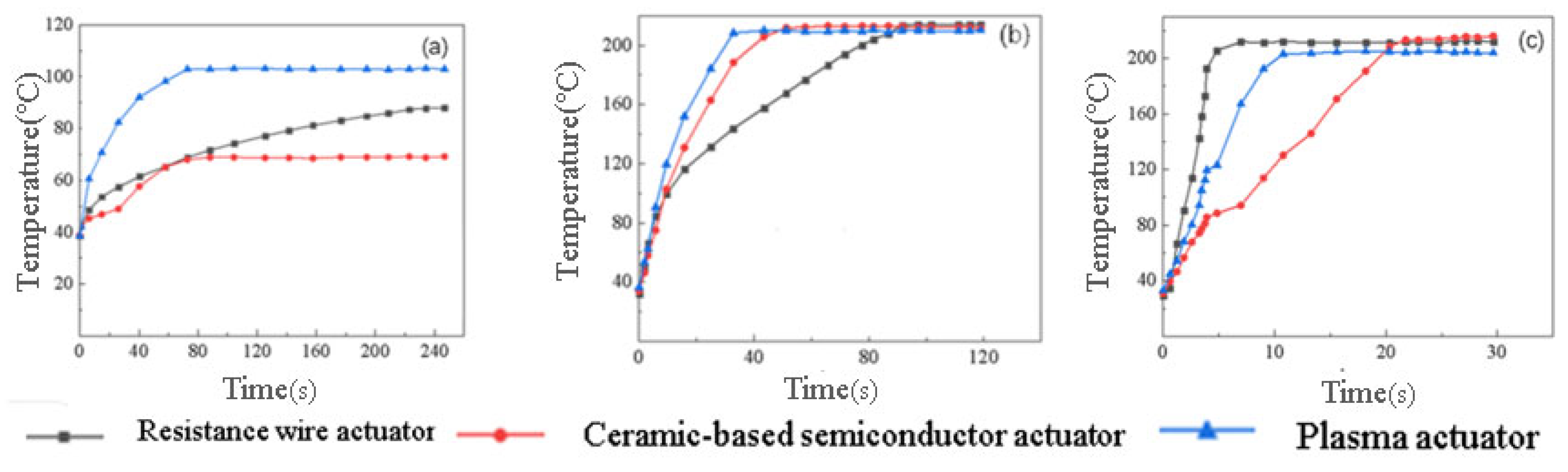
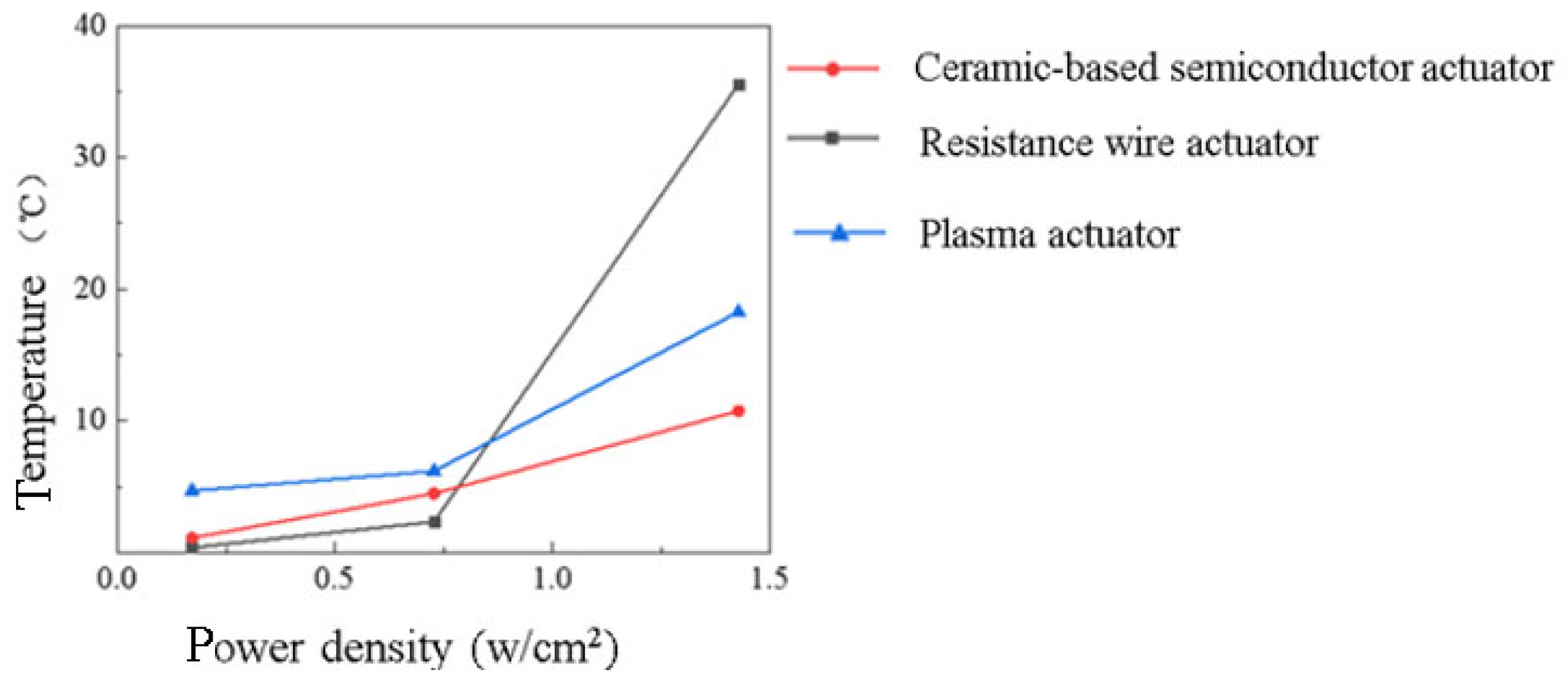
- The comparison of the actuators’ temperature rise rates at various power densities shows that, at lower levels, ceramic-based semiconductor actuators and electric heating films exhibit faster temperature rise rates and reach thermal equilibrium temperatures. As power density increases, all three actuators ultimately attain the same thermal equilibrium temperature. However, higher power levels lead to a decreased thermal equilibrium temperature in the plasma actuator due to deteriorating coupling between the power supply and the actuator. Nonetheless, plasma actuators exhibit a faster temperature rise rate compared to ceramic-based semiconductor actuators and resistance wires. At lower power densities, ceramic-based semiconductor actuators demonstrate the quickest reaction time, while the resistance wire actuator achieves a notably higher surface temperature than the other two types. Conversely, at higher power densities, the resistance wire actuator surpasses the power density and thermal equilibrium temperature of the other two heating films.
- (3)
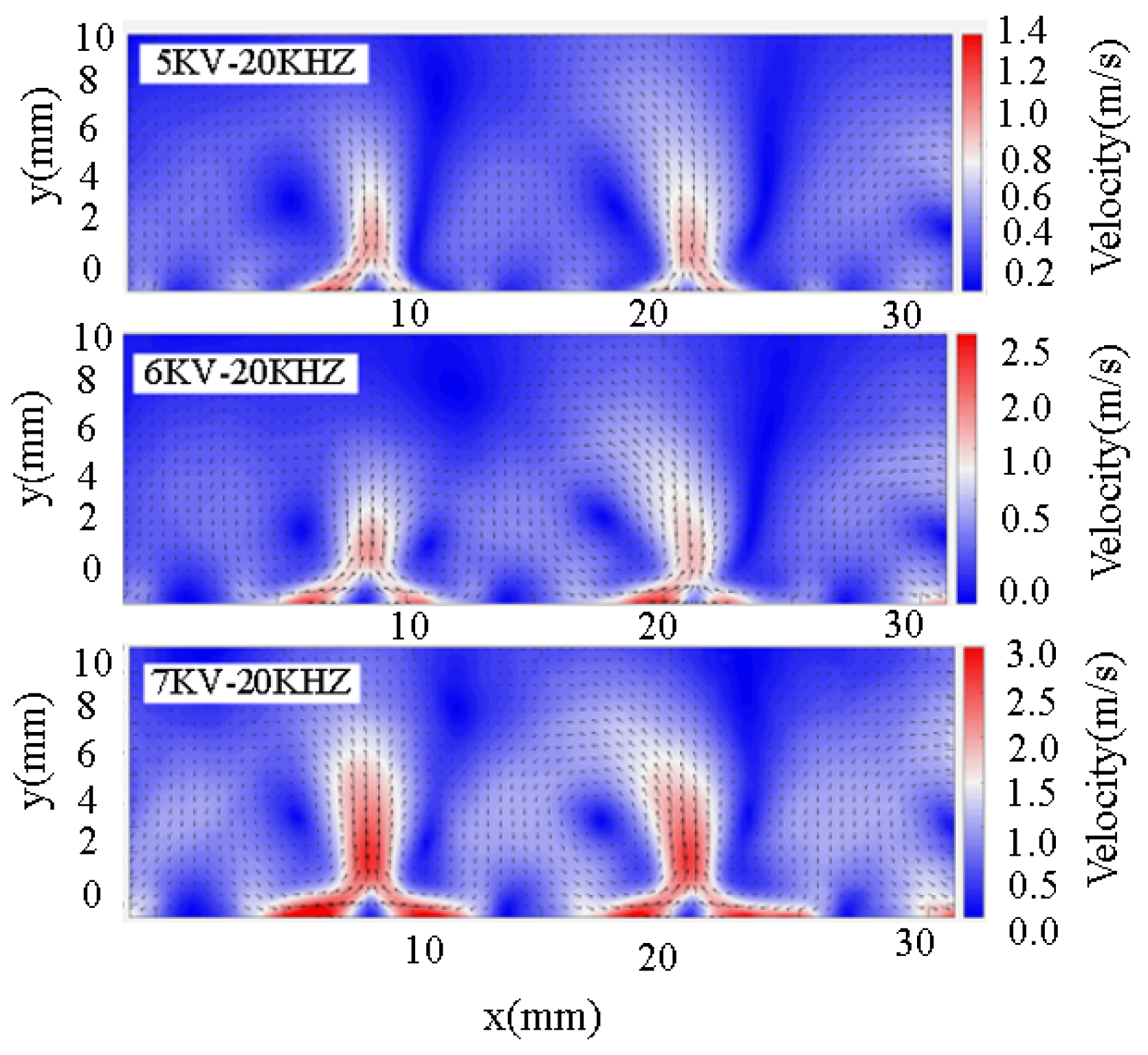
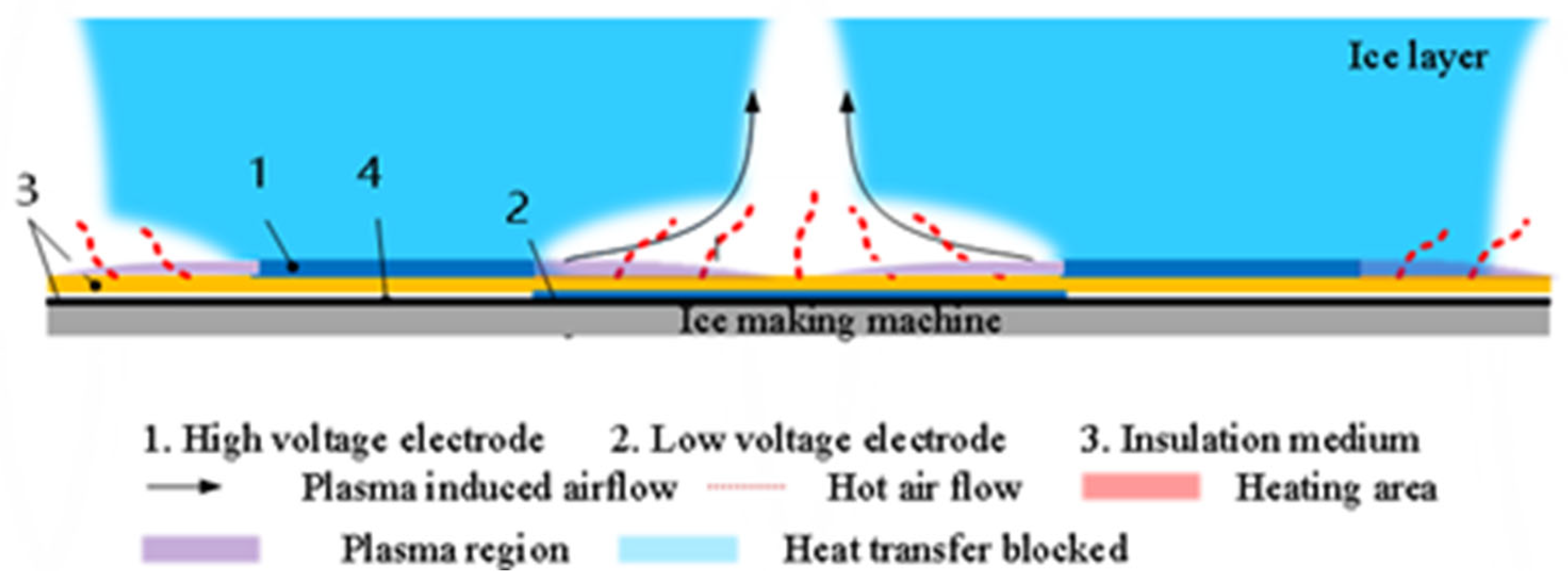
- The plasma-induced fluid flow on the actuator’s surface directs heat towards relatively cooler regions through convective heat transfer [58]. The heat transfer efficiency of the plasma actuator is notably lower than that of the resistance wire actuator due to its inherently static heat transfer nature. Consequently, the time taken for the plasma actuator’s lowest temperature rise point to reach thermal equilibrium is significantly shorter.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hu, M. The Harm of Ice Accumulation to Aircraft and Methods for Preventing and Removing Ice. Technol. Wind 2021, 5, 17–18. [Google Scholar]
- Xu, Z.; Su, Y.; Cao, Y. The influence and simulation of icing on aircraft maneuverability. J. Beijing Univ. Aeronaut. Astronaut. 2012, 38, 941–994. [Google Scholar]
- Yu, J.; Zhao, B.Y.; Bu, X.; Lin, G.; Li, Z. Numerical simulation of the performance of a certain aircraft engine nacelle hot air anti-icing system. Acta Aerodyn. Sin. 2016, 34, 302–307. [Google Scholar]
- Xu, J. Research on Electric Heating and Anti-Icing of Aircraft Windshield Glass. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2012. [Google Scholar]
- Wei, Y.; Xu, H.; Xue, Y. The influence of wing leading edge icing on the operational stability characteristics of large aircraft. J. Beijing Univ. Aeronaut. Astronaut. 2017, 13, 56–58. [Google Scholar]
- Bourgault, Y.; Beaugendre, H.; Habashi, W.G. Development of a shallow-water icing model in FENSAP-ICE. J. Aircr. 2000, 37, 640–646. [Google Scholar] [CrossRef]
- Hedde, T.; Guffond, D. ONERA three-dimensional icing model. AIAA J. 1995, 33, 1038–1045. [Google Scholar] [CrossRef]
- Ferro, C.G.; Maggiore, P.; Champvillair, D. Development of a Computational Fluid Dynamics Model for Ice Formation: Validation and Parameter Analysis. Atmosphere 2023, 14, 834. [Google Scholar] [CrossRef]
- Gent, R.W. TRAJICE2—A Combined Water Droplet Trajectory and Ice Accretion Prediction Program for Aerofoils. RAE TR90054. 1990. Available online: https://ntrs.nasa.gov/api/citations/19970023937/downloads/19970023937.pdf (accessed on 24 March 2023).
- Wang, Z.; Jiang, H. Aircraft anti-icing system and its technological development status. China Sci. Technol. Inf. 2017, 13, 56–58. [Google Scholar]
- Li, B. Aircraft de-icing/anti-icing fluid and de-icing technology. Clean World 2012, 28, 26–31. [Google Scholar]
- Liu, C. Numerical Calculation and Experimental Research on Aircraft Electric Thermal Anti-Icing/De-Icing System. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2021. [Google Scholar]
- Xiao, C. Research on Heat Transfer Characteristics and Effects of Aircraft Electric Deicing Process; China Aerodynamics Research and Development Center: Mianyang, China, 2011. [Google Scholar]
- Rekuviene, R.; Saeidiharzand, S.; Mažeika, L.; Samaitis, V.; Jankauskas, A.; Sadaghiani, A.K.; Gharib, G.; Muganlı, Z.; Koşar, A. A review on passive and active anti-icing and de-icing technologies. Appl. Therm. Eng. 2024, 250, 123474. [Google Scholar] [CrossRef]
- Li, L.; Liu, Y.; Tian, L.; Hu, H.; Hu, H.; Liu, X.; Hogate, I.; Kohli, A. An experimental study on a hot-air-based anti-/de-icing system for aero-engine inlet guide vanes. Appl. Therm. Eng. 2020, 167, 114778. [Google Scholar] [CrossRef]
- Pellissier MP, C.; Habashi, W.G.; Pueyo, A. Optimization via FENSAP-ICE of aircraft hot-air anti-icing systems. J. Aircr. 2011, 48, 265–276. [Google Scholar] [CrossRef]
- Li, H.; Zhou, M. Aircraft icing detection technology and engineering application of anti-icing and de-icing systems. Prog. Aviat. Eng. 2010, 1, 112–115. [Google Scholar]
- Wang, G.; Zhang, D.; Chen, H.; Chen, H.W. Aircraft Anti-Icing—Development from Traditional to Biomimetic. Ind. Technol. Innov. 2014, 1, 41–250. [Google Scholar]
- Shvydyuk, K.O. Long-lasting ceramic composites for surface dielectric barrier discharge plasma actuators. J. Eur. Ceram. Soc. 2023, 43, 6112–6121. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, R.; Luo, N.; Liu, Y.; Wu, Y.; Yu, B.; Liu, S.; Zhou, F. All-Day Anti-Icing/De-Icing Coating by Solar-Thermal and Electric-Thermal Effects. Adv. Mater. Technol. 2021, 6, 2100371. [Google Scholar] [CrossRef]
- Pan, L.; Liu, Z.; Zhong, L.; Pang, X.; Wang, F.; Zhu, Y.; Ma, W.; Lv, Y. Carbon fiber/poly ether ether ketone composites modified with graphene for electro-thermal deicing applications. Compos. Sci. Technol. 2020, 192, 108–117. [Google Scholar] [CrossRef]
- Huang, J.; Li, D.; Peng, Z.; Zhang, B.; Yao, Y.; Chen, S. High-Efficient Anti-Icing/Deicing Method Based on Graphene Foams. ACS Appl. Mater. Interfaces 2023, 15, 43026–43037. [Google Scholar] [CrossRef] [PubMed]
- Khadak, A.; Subeshan, B.; Asmatulu, R. Studies on de-icing and anti-icing of carbon fiber-reinforced composites for aircraft surfaces using commercial multifunctional permanent superhydrophobic coatings. J. Mater. Sci. 2021, 56, 3078–3094. [Google Scholar] [CrossRef]
- Qin, W.; Lin, C.; Geng, J.; Xue, Y.; Zhong, M.; Zou, Y.; Liu, G. Multifunctional MXene/CNT-based layered film for icing detection, anti-icing, and deicing application. Ceram. Int. 2022, 48, 32767–32776. [Google Scholar] [CrossRef]
- Shvydyuk, K.O.; Nunes-Pereira, J.; Rodrigues, F.F.; Páscoa, J.C.; Lanceros-Mendez, S.; Silva, A.P. Holistic Characterization of MgO-Al2O3, MgO-CaZrO3, and Y2O3-ZrO2 Ceramic Composites for Aerospace Propulsion Systems. Ceramics 2024, 7, 364–384. [Google Scholar] [CrossRef]
- Tian, T. Theoretical and Experimental Research on Electric Heating Deicing of Graphene Composite Materials. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2021. [Google Scholar]
- Shao, T.; Wang, R.; Zhang, C. Atmospheric-pressure pulsed discharges and plasmas: Mechanism, characteristics and applications. High Volt. 2018, 3, 14–20. [Google Scholar] [CrossRef]
- Chen, J.; Parsi, P.K.; Marklund, P.; Björling, M.; Shi, Y. Graphene-enhanced, wear-resistant, and thermal-conductive, anti-/de-icing gelcoat composite coating. Adv. Compos. Hybrid Mater. 2024, 7, 9. [Google Scholar] [CrossRef]
- Starikovskii, A.; Nikipelov, A.; Nudnova, M. SDBD plasma actuator with nanosecond pulse-periodic discharge. Plasma Sources Sci. Technol. 2009, 18, 34–35. [Google Scholar] [CrossRef]
- Tao, S.; Kaihua, L.; Cheng, Z. Experimental study on repetitive unipolar nanosecond-pulse dielectric barrier discharge in air at atmospheric pressure. J. Phys. D Appl. Phys. 2008, 41, 215203. [Google Scholar] [CrossRef]
- Erfani, R.; Zare-Behtash, H.; Kontis, K. Plasma actuator: Influence of dielectric surface temperature. Exp. Therm. Fluid Sci. 2012, 42, 258–264. [Google Scholar] [CrossRef]
- Khomich, V.Y.; Yamshchikov, V.A. Effect of power supply modes of multi-discharge actuator systems on their electric discharge and gas-dynamic characteristics. Acta Astronaut. 2024, 215, 135–141. [Google Scholar] [CrossRef]
- Barni, R.; Roman, H.E.; Riccardi, C. Ionizing Waves in Surface Dielectric Barrier Discharges Plasma Actuators. Actuators 2024, 13, 86. [Google Scholar] [CrossRef]
- Kuzenov, V.V.; Ryzhkov, S.V.; Varaksin, A.Y. Computational and Experimental Modeling in Magnetoplasma Aerodynamics and High-Speed Gas and Plasma Flows (A Review). Aerospace 2023, 10, 662. [Google Scholar] [CrossRef]
- Abdollahzadeh, M.; Rodrigues, F.; Nunes-Pereira, J.; Pascoa, J.C.; Pires, L. Parametric optimization of surface dielectric barrier discharge actuators for ice sensing application. Sens. Actuators A Phys. 2022, 335, 113391. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, X.; Liang, H.; Xie, L.; Wei, B.; Zong, H.; Wu, Y.; Li, Y. Improving flight performance of UAVs by ice shape modulation. Chin. J. Aeronaut. 2024, in press. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, X. Research progress and outlook of flow field created by dielectric barrier discharge plasma actuators driven by a sinusoidal alternating current high-voltage power. Chin. J. Theor. Appl. Mech. 2023, 55, 285–298. [Google Scholar]
- Sekimoto, S.; Fujii, K.; Anyoji, M.; Miyakawa, Y.; Ito, S.; Shimomura, S.; Nishida, H.; Nonomura, T.; Matsuno, T. Flow control around NACA0015 airfoil using a dielectric barrier discharge plasma actuator over a wide range of the Reynolds number. Actuators 2023, 12, 43. [Google Scholar] [CrossRef]
- Moayedi, H.; Amanifard, N.; Deylami, H.M. Parametric study of DBD plasma actuator for heat transfer enhancement in flow over a flat plate at low Reynolds numbers. J. Electrost. 2023, 124, 103825. [Google Scholar] [CrossRef]
- Shao, T.; Zhang, C.; Long, K. Surface modification of polyimide films using unipolar nanosecond-pulse DBD in atmospheric air. Appl. Surf. Sci. 2010, 256, 3888–3894. [Google Scholar] [CrossRef]
- Tian, M.; Song, H.; Liang, H. Experimental Study on Dielectric Barrier Discharge Plasma Anti-icing and Deicing. CIESC J. 2019, 70, 4247–4256. [Google Scholar]
- Zhang, X.; Yugang, Z.; Chun, Y. Recent developments in thermal characteristics of surface dielectric barrier discharge plasma actuators driven by sinusoidal high-voltage power. Chin. J. Aeronaut. 2023, 36, 1–21. [Google Scholar] [CrossRef]
- Zhong, Y.; Jin, Z.; Chen, M.; Yang, Z. An experimental investigation of the thermal effects in AC-DBD plasma actuator on the melting process of an ice bead. Exp. Therm. Fluid Sci. 2023, 147, 110950. [Google Scholar] [CrossRef]
- Chen, Z.; Wong, C.C.; Wen, C.Y. Thermal effects on the performance of a nanosecond dielectric barrier discharge plasma actuator at low air pressure. Phys. Fluids 2023, 35, 017110. [Google Scholar] [CrossRef]
- Benmoussa, A.; Belasri, A.; Harrache, Z. Numerical investigation of gas heating effect in dielectric barrier discharge for Ne-Xe exclam. Curr. Appl. Phys. 2017, 17, 479–483. [Google Scholar] [CrossRef]
- Tian, Y.; Cai, J.; Yang, L. Experimental study on thermal effects of pulsed dielectric barrier discharge plasma. J. Aerodyn. 2019, 34, 2663–2676. [Google Scholar]
- Meng, X.; Hui, W.; Yi, X. Current status and prospects of AC-SDBD plasma excitation anti-icing/deicing research. Acta Aerodyn. Sin. 2022, 40, 31–49. [Google Scholar]
- Chen, J.; Liang, H.; Li, Y. Experimental Study on Anti-Icing Performance of NS-DBD Plasma Actuator. Appl. Sci. 2018, 8, 1889. [Google Scholar] [CrossRef]
- Liu, X.; Liang, H.; Zong, H. NACA0012 airfoil plasma ice shape control experiment. Chin. J. Aeronaut. 2022, 43, 398–409. [Google Scholar]
- Chen, J.; Liang, H.; Jia, M. Experimental Study on Heat Transfer Process of Large Liquid Droplets Impacting on Ice Formation and Dielectric Barrier Discharge for Deicing. CIESC J. 2018, 69, 3825–3834. [Google Scholar]
- Liang, H.; Xie, L.; Wu, Y. Experimental study on plasma ice shape control to improve aerodynamic performance of airfoils/wings. Acta Aerodyn. Sin. 2021, 39, 156–164+195. [Google Scholar]
- Wei, B.; Wu, Y.; Liang, H. SDBD-based plasma anti-icing: A stream-wise plasma heat knife configuration and criteria energy analysis. Int. J. Heat Mass Transf. 2019, 138, 163–172. [Google Scholar] [CrossRef]
- Kolbakir, C.; Hu, H.; Liu, Y. An Experimental Investigation on the Thermodynamic Characteristics of DBD Plasma Actuations for Aircraft Icing Mitigation. Plasma Sci. Technol. 2022, 25. [Google Scholar]
- Tian, T.; Wang, Y.; Tao, M.; Zhu, C. Experimental Study on Electrothermal Deicing of Graphene Composite Materials. Sci. Technol. Eng. 2019, 19, 390–395. [Google Scholar]
- Rahimi, A.; Hojjati, M.; Dolatabadi, A.; Moreau, C. Thermal spray coating on polymeric composite for de-icing and anti-icing applications. J. Manuf. Sci. Eng. 2021, 143, 101008. [Google Scholar] [CrossRef]
- Zhang, L.; Gao, C.; Zhong, L.; Zhu, L.; Chen, H.; Hou, Y.; Zheng, Y. Robust photothermal superhydrophobic coatings with dual-size micro/nano structure enhance anti-/de-icing and chemical resistance properties. Chem. Eng. J. 2022, 446, 137461. [Google Scholar] [CrossRef]
- Zhao, Z.; Chen, H.; Liu, X. Development of highly efficient synthetic electric heating coating for anti-icing/de-icing. Surf. Coat. Technol. 2018, 349, 340–346. [Google Scholar] [CrossRef]
- Rodrigues, F.; Abdollahzadehsangroudi, M.; Nunes-Pereira, J.; Páscoa, J. Recent Developments on Dielectric Barrier Discharge (DBD) Plasma Actuators for Icing Mitigation. Actuators 2022, 12, 5. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | Plasma Actuator | Ceramic-Based Semiconductor Actuator | Resistance Wire Actuator |
|---|---|---|---|
| 1 | 6 kV 1 kHZ 0.170 W/cm2 | 11 V 0.7 A 0.171 W/cm2 | 6.5 V 1.6 A 0.169 W/cm2 |
| 2 | 6 kV 4 kHZ 0.727 W/cm2 | 20 V 1.7 A 0.756 W/cm2 | 14 V 3.2 A 0.727 W/cm2 |
| 3 | 6 kV 10 kHZ 1.427 W/cm2 | 26 V 2.5 A 1.444 W/cm2 | 20.5 V 4.4 A 1.464 W/cm2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Liang, H.; Wei, B.; Bian, D.; Liu, S.; Liu, H. Comparative Experimental Study on the De-Icing Performance of Multiple Actuators. Actuators 2024, 13, 226. https://doi.org/10.3390/act13060226
Zhang J, Liang H, Wei B, Bian D, Liu S, Liu H. Comparative Experimental Study on the De-Icing Performance of Multiple Actuators. Actuators. 2024; 13(6):226. https://doi.org/10.3390/act13060226
Chicago/Turabian StyleZhang, Jiajun, Hua Liang, Biao Wei, Dongliang Bian, Shimin Liu, and Hongrui Liu. 2024. "Comparative Experimental Study on the De-Icing Performance of Multiple Actuators" Actuators 13, no. 6: 226. https://doi.org/10.3390/act13060226
APA StyleZhang, J., Liang, H., Wei, B., Bian, D., Liu, S., & Liu, H. (2024). Comparative Experimental Study on the De-Icing Performance of Multiple Actuators. Actuators, 13(6), 226. https://doi.org/10.3390/act13060226