
Research on Damping Hole Optimization of Hydro-Pneumatic Suspension for Mining Trucks under Variable Load Conditions
 , ,
, ,  ,
,
Abstract
1. Introduction
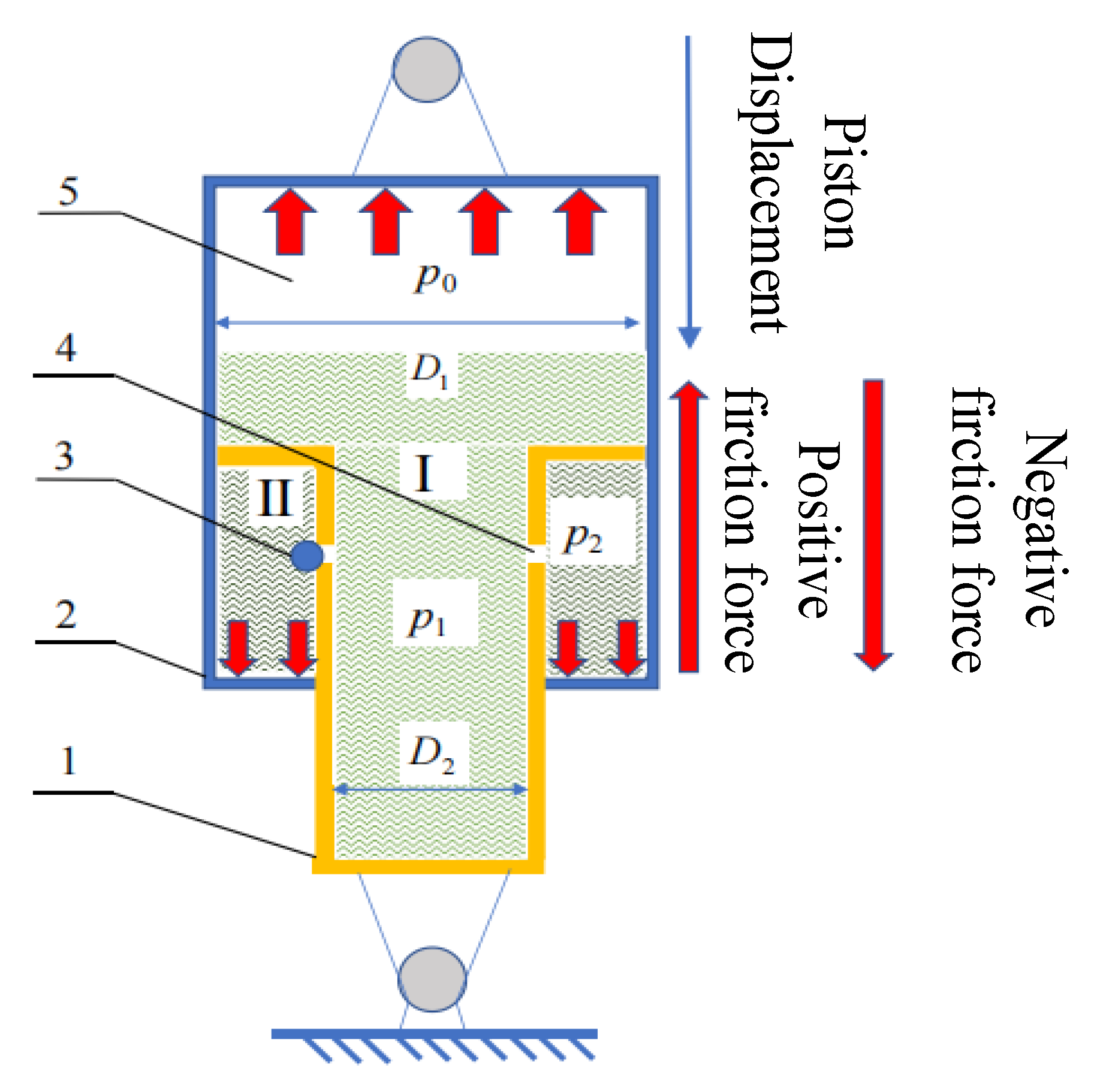
2. Modeling Analysis of Hydro-Pneumatic Suspension
3. Simulation Modeling and Validation of Hydro-Pneumatic Suspension
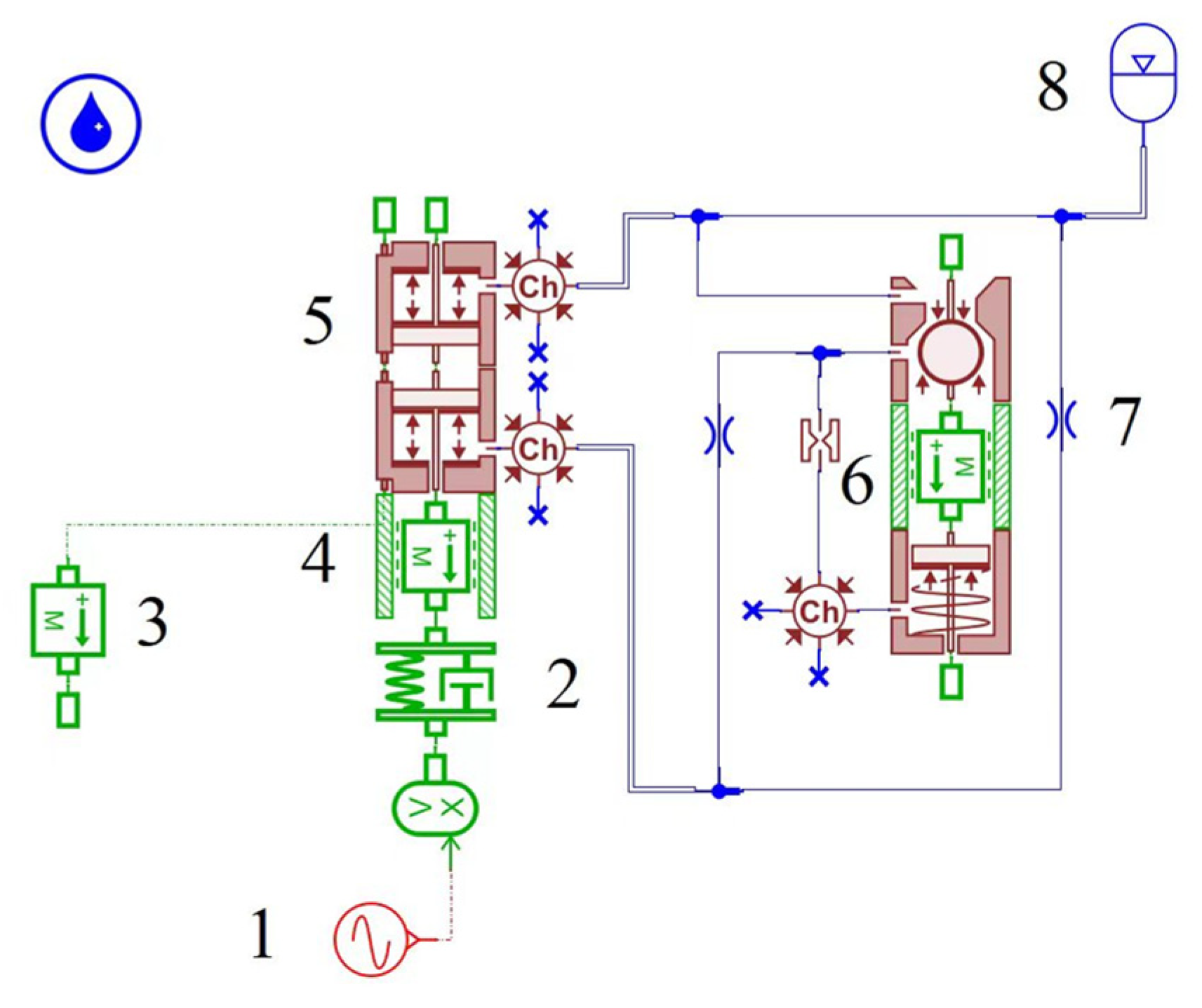
3.1. Simulation Model of Hydro-Pneumatic Suspension
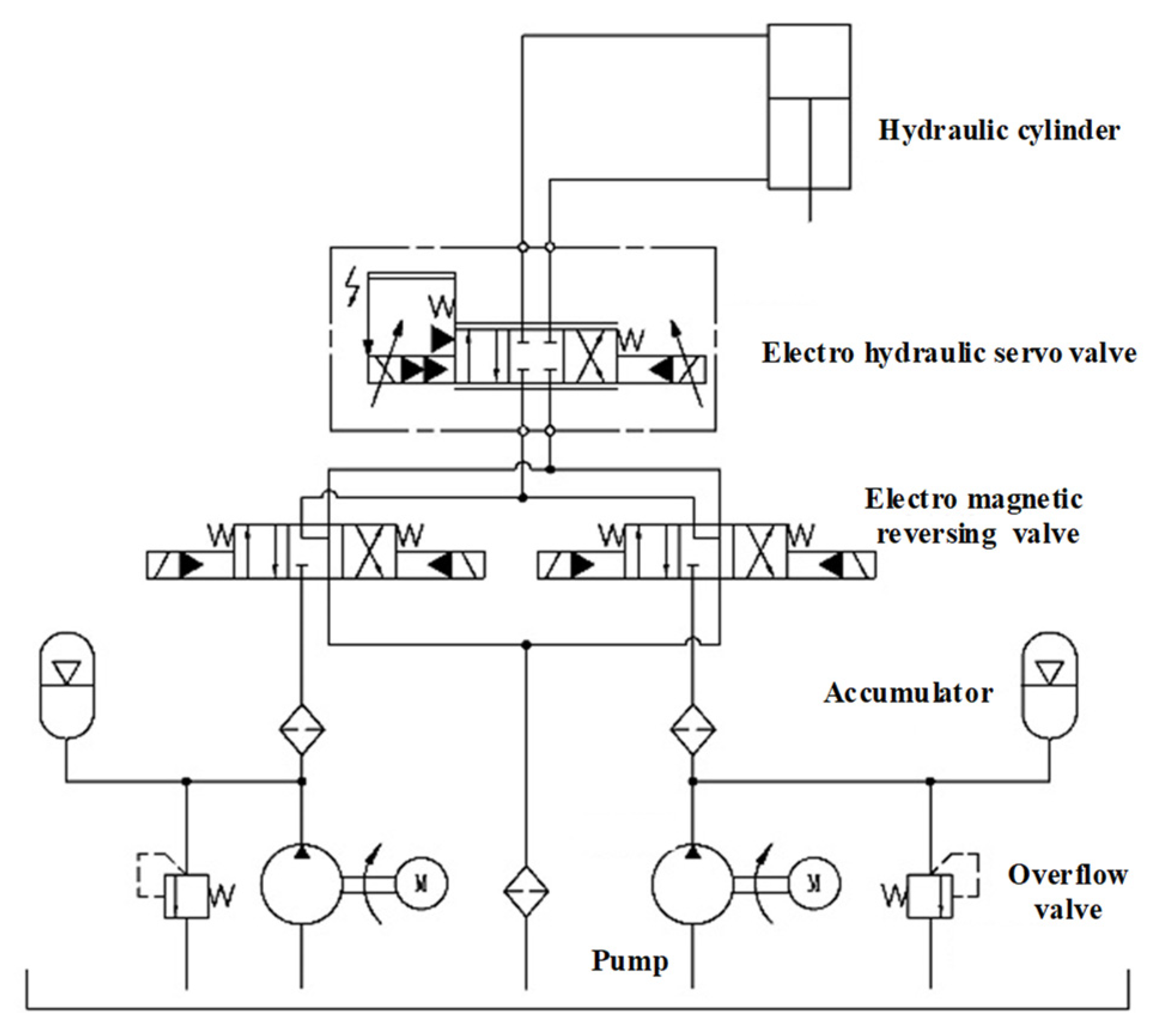
3.2. Hydro-Pneumatic Suspension Test Bench
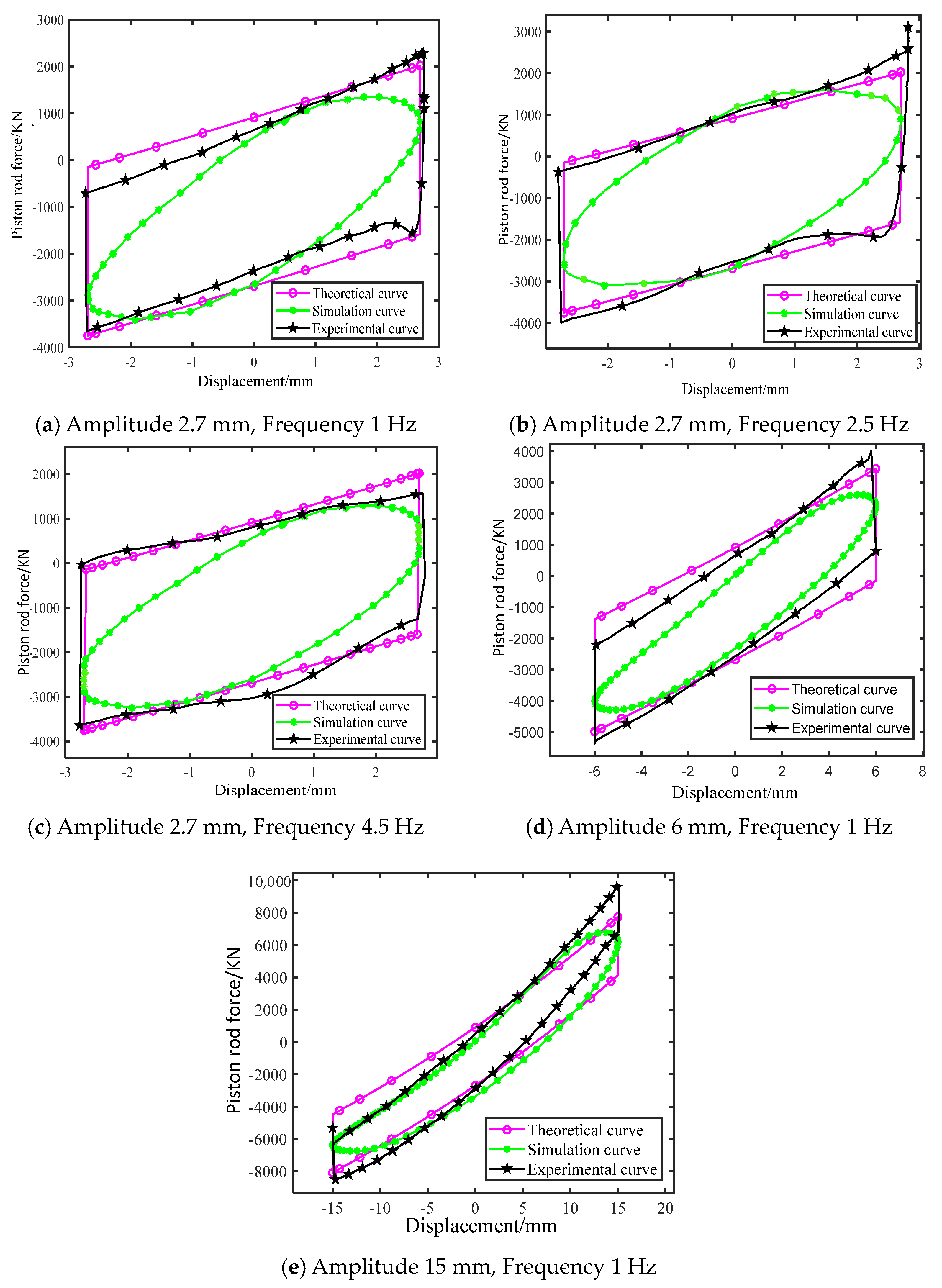
3.3. Validation of Hydro-Pneumatic Suspension Model
4. Effect of Damping Aperture under Step Signals of Road Displacement
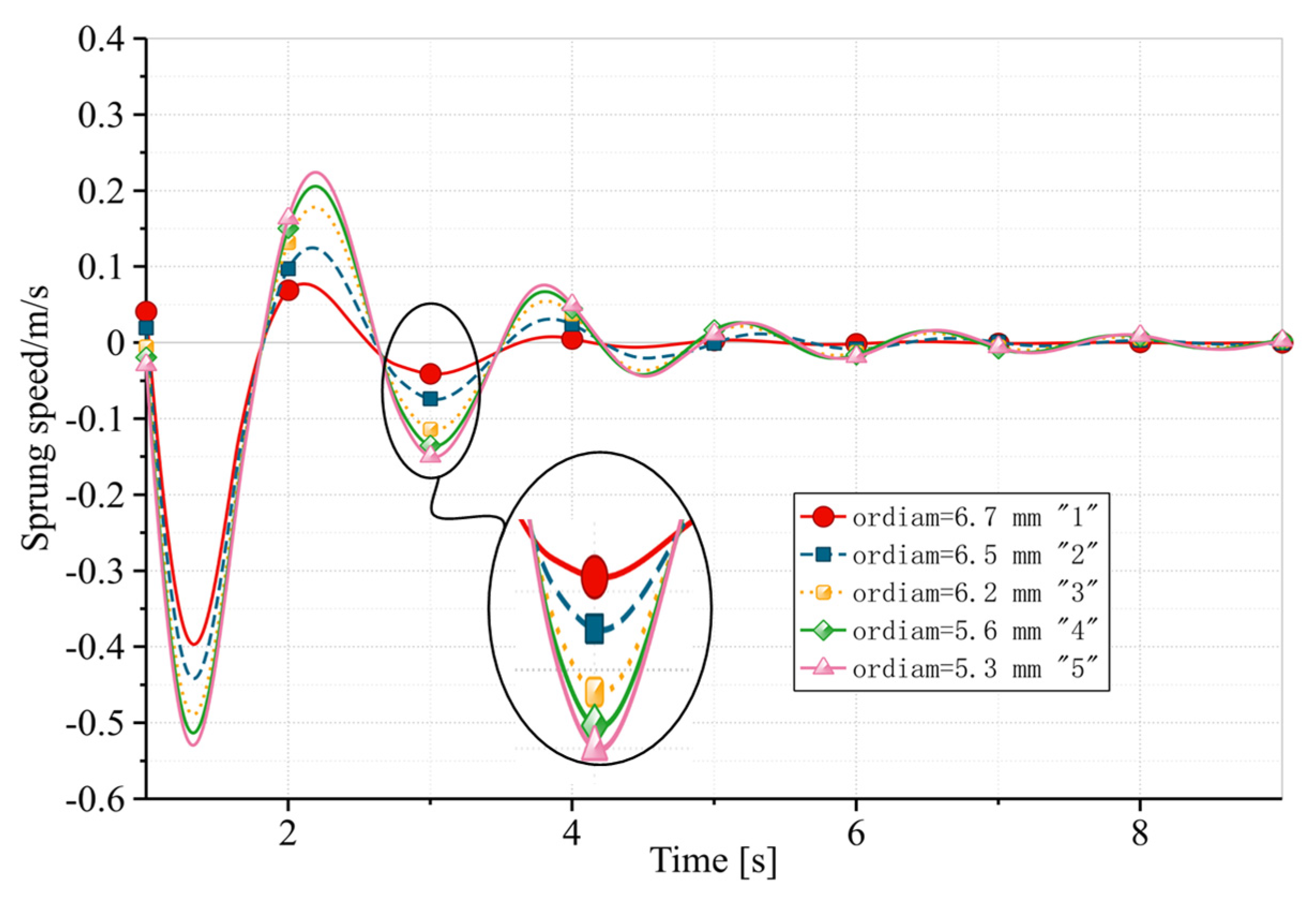
4.1. Step Response under No-Load Conditions
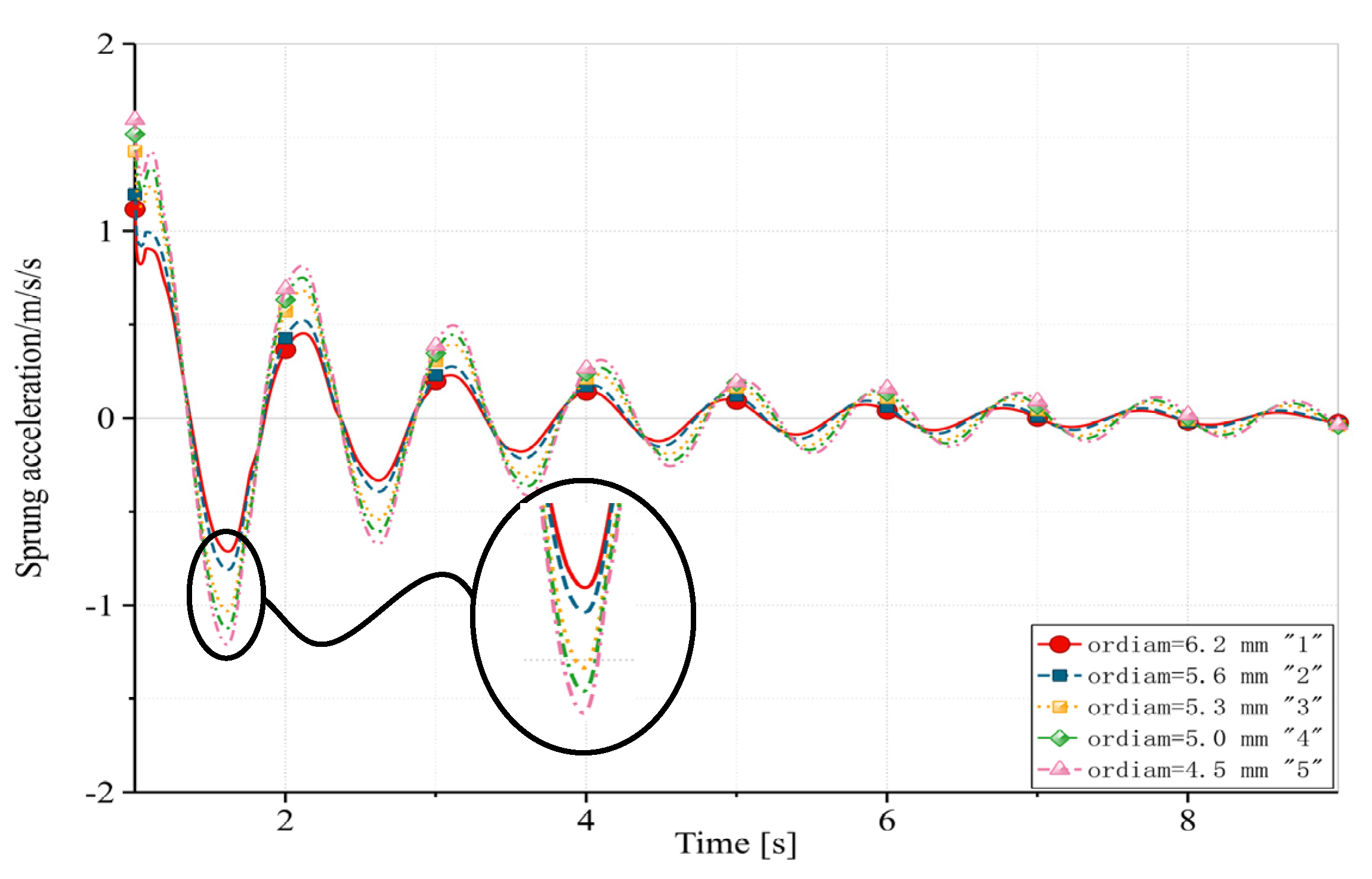
4.2. Step Response under Full-Load Conditions
5. Discussion and Conclusions
- (1)
- The equilibrium mathematical model of the hydro-pneumatic suspension was established, yielding expressions for the damping force and damping coefficient. The damping characteristics of the hydro-pneumatic suspension were not only dependent on piston speed, they were also influenced by structural parameters, including the number of holes and check valves, as well as the flow area of the check valves and holes. A simulation model for the hydro-pneumatic suspension and an experimental bench were constructed. The variation of force relative to the equilibrium position with the displacement of the rod was analyzed under different displacement excitation signals. The simulation and experimental results exhibited convergence, thereby validating the accuracy of the simulation model.
- (2)
- Utilizing the simulation model, the impact of the hole diameter on the damping characteristics of the hydro-pneumatic suspension was investigated. With an increase in hole diameter, the system’s setting time after excitation extended, accompanied by a corresponding decrease in peak longitudinal acceleration. A weight table and comprehensive evaluation index, which take into account both ride comfort and vehicle stability, were proposed. This methodology offers a systematic approach for selecting the optimal damping hole size under various working conditions. Furthermore, we determined the optimal damping hole diameter under both no-load and full-load conditions. Our study not only contributes to the optimization of damping hole selection for mining trucks but also provides a valuable methodology and insights applicable to other types of vehicles.
- (3)
- The optimal hole diameter for the hydro-pneumatic suspension was found to be 6.2 mm under no-load conditions, while the optimal diameter was 5.0 mm under full-load conditions. The results suggested the possibility of designing a variable damping hydro-pneumatic suspension with a hole diameter ranging between 5.0 and 6.2 mm to supply to various loading conditions. However, further research is needed to explore the variation trend of the damping hole flux area with piston displacement.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Value of piston acceleration | |
| Area of rodless chamber | |
| Area of rod chamber | |
| Overflow area of check valves | |
| Overflow area of hole | |
| Weight of setting time | |
| Damping coefficient | |
| Weight of peak longitudinal acceleration | |
| Flow factor of check valves | |
| Flow factor of hole | |
| Variables related to gas dissolution and oil compression | |
| Damping force | |
| Kinetic friction | |
| Friction force | |
| Static friction | |
| Elastic force | |
| Sprung force | |
| Acceleration of gravity | |
| The height of the gas at static equilibrium | |
| Stiffness | |
| Volumetric modulus of elasticity of the oil | |
| Mass of the spring load | |
| Initial-state gas pressure | |
| Pressure of rodless chamber | |
| Pressure of rod chamber | |
| Hydraulic oil flow | |
| Setting time | |
| Speed | |
| Initial-state gas volume | |
| Initial volume of the rodless chamber | |
| Initial volume of the rod chamber | |
| Volume of nitrogen dissolved | |
| Density | |
| Gas solubility | |
| Gas variability index |
References
- Sun, J. Application and key technologies of hydro-pneumatic suspension review. Coal Mine Mach. 2007, 28, 8–11. [Google Scholar]
- Liu, X.; Li, Y. Vehicle suspension technology of oil and gas research review. J. Southwest Jiaotong Univ. 2024, 3, 1–20. [Google Scholar]
- Repin, S.; Vasileva, P.; Evtykov, S.; Maksimov, S.; Ruchkina, I.; Eremeev, A. Theoretical study of throttle valve system operation in the hydropneumatic shock absorber of the transport and technological machinery undercarriage. Transp. Res. Procedia 2021, 57, 562–572. [Google Scholar] [CrossRef]
- Zhang, D.; Tian, J. Dump truck suspension characteristic simulation of hydro-pneumatic and comfort research. J. Chongqing Univ. Sci. Technol. (Nat. Sci.) 2017, 31, 45–52. [Google Scholar]
- You, Z.; He, R.; Liu, W. Based on the stiffness damping characteristics overloading car hydro-pneumatic suspension performance analysis. Mech. Des. Manuf. 2022, 3, 223–227. [Google Scholar]
- Zuska, A.; Jackowski, J. Influence of Changes in Stiffness and Damping of Tyre Wheels on the Outcome of the Condition Assessment of Motor Vehicle Shock Absorbers. Energies 2023, 16, 3876. [Google Scholar] [CrossRef]
- Verros, G.; Natsiavas, S.; Papadimitriou, C. Design optimization of quarter-car modelswith passive and semi-active suspensions under random road excitation. J. Vib. Control 2005, 11, 581–606. [Google Scholar] [CrossRef]
- Cao, R.; Zhang, H.; Xiong, S. Mine car Hydro-pneumatic suspension system modeling and simulation. Mech. Des. Manuf. 2011, 1, 239–241. [Google Scholar]
- Tao, W.; Liu, Z. Control of loader seat suspension based on damped state switching. J. Jiangsu Univ. (Nat. Sci. Ed.) 2019, 40, 504–505. [Google Scholar]
- Wang, S.; Zhai, X.; Sun, X.; Shi, D.; Yin, C. Analysis and control of a vehicle hydro pneumatic suspension system with multistage adjustable stiffness and damping characteristics. J. Vib. Shock. 2022, 41, 168–177. [Google Scholar]
- Goga, V.; Kľúčik, M. Optimization of vehicle suspension parameters with use of evolutionary computation. Procedia Eng. 2012, 48, 174–179. [Google Scholar] [CrossRef]
- Sang, Z.; Dong, M.; Gu, L. Numerical analysis of a dual-chamber hydro-pnematic suspension using nonlinear vibration theory and fractional calculus. Adv. Mech. Eng. 2017, 9, 1687814017705797. [Google Scholar] [CrossRef]
- Han, S.; Liu, X.; Chao, Z.; Li, H. Optimization of damping parameters of semi-active hydro-pneumatic suspension based on particle swarm Optimization. J. Ordnance Equip. Eng. 2020, 41, 53–57. [Google Scholar]
- Yuan, J.; Fan, J.; Zhou, Y.; Dou, H.; Song, F. Design of a Front Alxe Hydro-pneumatic Suspension with Controllable Stiffness and Damping. Mach. Tool Hydraul. 2019, 47, 135–141. [Google Scholar]
- Wang, X.; Gao, Q.-H.; Liu, Z.-H.; Feng, J.-T. Characteristics Analysis of Interconnected Hydro-pneumatic Suspension for Heavy Multi-axle Vehicle. Chin. Hydraul. Pneum. 2018, 15, 32–40. [Google Scholar]
- Liu, Q.; Feng, H.; Liu, S. Analysis of ride comfort in the suspension system of a mining dump truck using AMESim simulation software. J. Southwest JiaoTong Univ. 2024, 1–8. Available online: http://kns.cnki.net/kcms/detail/51.1277.U.20230922.1157.010.html (accessed on 26 April 2024).
- Liu, Y. Based on the characteristics of oil and gas on hydro-pneumatic suspension performance of Simulink analysis. Mach. Hydraul. 2017, 45, 152–158. [Google Scholar]
- Le, W. A Heavy Vehicle Hydro-Pneumatic Suspension Control Method Research. Master’s Thesis, Nanjing University of Science and Technology, Nanjing, China, 2016. [Google Scholar]
- Zhuang, D.; Liu, J.; Yu, F.; Lin, Y. Auto oil and gas spring nonlinear mathematical model and features. J. Shanghai Jiao Tong Univ. 2005, 39, 1441–1444. [Google Scholar]
- Huang, X.; Yang, J.; Shen, Y.; Feng, Y. Based on the dissolved gas and oil compressibility of hydro-pneumatic suspension performance study. J. Agric. Mach. 2013, 44, 14–18+13. [Google Scholar]
- Wang, G.; Wang, W.; Suo, X. Influence of structural parameters on dynamic characteristics of two-stage pressure type pneumatic suspension. Chin. Hydraul. Pneum. 2023, 47, 107–115. [Google Scholar]
- Tong, J.; Li, W.; Fu, S. Analysis of Influence of Main Parameters of Hydro-pneumatic Spring on Performance of Suspension System. J. Syst. Simul. 2008, 9, 2271–2274. [Google Scholar]
- Liu, G.; Chen, S.; Wang, W.; Zhao, Y. Simulation and Test of Oil-gas Suspension based on AMEsim and Simulink. J. Vib. Meas. Diagn. 2016, 36, 346–350+405. (In Chinese) [Google Scholar]
- Guo, Q.; Chi, Y. Simulation and Parameters Optimization of Hydro-pneumatic Suspension Based on AMESim. Coal Mine Mach. 2014, 35, 70–72. [Google Scholar]
- Zhang, X.-L.; Liu, J.; Nie, J.; Wei, H.; Chen, L. Simulation Analysis and Experiment Research on Hydro-Pneumatic ISD Suspension. Shock Vib. 2021, 2021, 2095350. [Google Scholar] [CrossRef]
- Zhen, L.; Zhang, W. Single chamber of hydro-pneumatic suspension simulation and experimental study. J. Mech. Eng. 2009, 45, 290–294. [Google Scholar] [CrossRef]
- Zhang, J.; Li, J.Y.; Wang, T.; Qian, Z.S. Influence of nozzle structure on theflow field of the prestage of nozzle flapper servo valve. Int. J. Hydromechatron. 2023, 6, 59–75. [Google Scholar] [CrossRef]
- Qian, P.; Liu, L.; Pu, C.; Meng, D.; Páez, L.M.R. Methods to improve motionservo control accuracy of pneumatic cylinders-review and prospect. Int. J. Hydromechatron. 2023, 6, 274–310. [Google Scholar] [CrossRef]
- Guo, Y.; Zhang, Z. Review on ride comfort control of active hydro-pneumatic suspension system for high speed and heavy load vehicles. Sci. Technol. Eng. 2022, 22, 4675–4686. [Google Scholar]
- Chen, K. Research on Ride Comfort Analysis and Collaborative Optimization of Heavy Commercial Vehicles Based on Nonlinear Mechanical Properties of Key Parts. Master’s Thesis, Guilin University of Electronic Technology, Guilin, China, 2022; pp. 23–24. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Numerical Value |
|---|---|
| Oil density/kg·m−3 | 850 |
| Bulk modulus of elasticity/MPa | 1000 |
| Saturation pressure/MPa | 100 |
| Number of check valves and holes | 2 |
| Flow factors of holes and check valves | 0.62 |
| No-load static equilibrium height/mm | 105 |
| Hole diameter/mm | 5.3 |
| Oil cylinder bore/mm | 180 |
| Cylinder rod diameter/mm | 150 |
| Cylinder stroke/mm | 800 |
| 1/4 Front suspension no-load sprung mass, mk/kg | 4430 |
| 1/4 Front suspension loaded with sprung mass, mm/kg | 9430 |
| Kinetic friction force/N | 1800 |
| Accumulator volume/L | 8 |
| Initial charging pressure of accumulator/MPa | 1.8 |
| Displacement Signal | Amplification/mm | Frequency/Hz |
|---|---|---|
| 1 | 2.7 | 1 |
| 2 | 2.5 | |
| 3 | 4.5 | |
| 4 | 6 | 1 |
| 5 | 15 | 1 |
| Load | Weight of Setting Time (B) | Weight of Peak Longitudinal Acceleration (C) |
|---|---|---|
| No load | 30% | 70% |
| Under-load | 40% | 60% |
| Medium load | 50% | 50% |
| Heavy load | 60% | 40% |
| Full load | 70% | 30% |
| Damped Hole | Setting Time | Peak Longitudinal Acceleration | Complete Review |
|---|---|---|---|
| 6.7 mm | 3.831 s | 1.197 m/s2 | 0.952 |
| 6.5 mm | 3.617 s | 1.210 m/s2 | 0.939 |
| 6.2 mm | 3.443 s | 1.396 m/s2 | 1.013 |
| 6 mm | 3.121 s | 1.454 m/s2 | 1.017 |
| 5.6 mm | 2.354 s | 1.625 m/s2 | 1.032 |
| Damped Hole | Setting Time | Peak Longitudinal Acceleration | Complete Review |
|---|---|---|---|
| 6.2 mm | 4.318 s | 1.742 m/s2 | 1.071 |
| 5.6 mm | 3.898 s | 1.846 m/s2 | 1.013 |
| 5.3 mm | 3.828 s | 1.854 m/s2 | 1.002 |
| 5.0 mm | 3.528 s | 1.866 m/s2 | 0.949 |
| 4.5 mm | 3.481 s | 1.991 m/s2 | 0.960 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, W.; Zhao, Z.; Zhou, X.; Cao, X.; Ye, M.; Cao, C.; Alam, M.M. Research on Damping Hole Optimization of Hydro-Pneumatic Suspension for Mining Trucks under Variable Load Conditions. Actuators 2024, 13, 163. https://doi.org/10.3390/act13050163
Zhu W, Zhao Z, Zhou X, Cao X, Ye M, Cao C, Alam MM. Research on Damping Hole Optimization of Hydro-Pneumatic Suspension for Mining Trucks under Variable Load Conditions. Actuators. 2024; 13(5):163. https://doi.org/10.3390/act13050163
Chicago/Turabian StyleZhu, Wenfeng, Zenglu Zhao, Xingtong Zhou, Xuepeng Cao, Min Ye, Chuqing Cao, and Mohammad Manjur Alam. 2024. "Research on Damping Hole Optimization of Hydro-Pneumatic Suspension for Mining Trucks under Variable Load Conditions" Actuators 13, no. 5: 163. https://doi.org/10.3390/act13050163
APA StyleZhu, W., Zhao, Z., Zhou, X., Cao, X., Ye, M., Cao, C., & Alam, M. M. (2024). Research on Damping Hole Optimization of Hydro-Pneumatic Suspension for Mining Trucks under Variable Load Conditions. Actuators, 13(5), 163. https://doi.org/10.3390/act13050163