
Intelligent Reduced-Dimensional Scheme of Model Predictive Control for Aero-Engines

Abstract
1. Introduction
- (1)
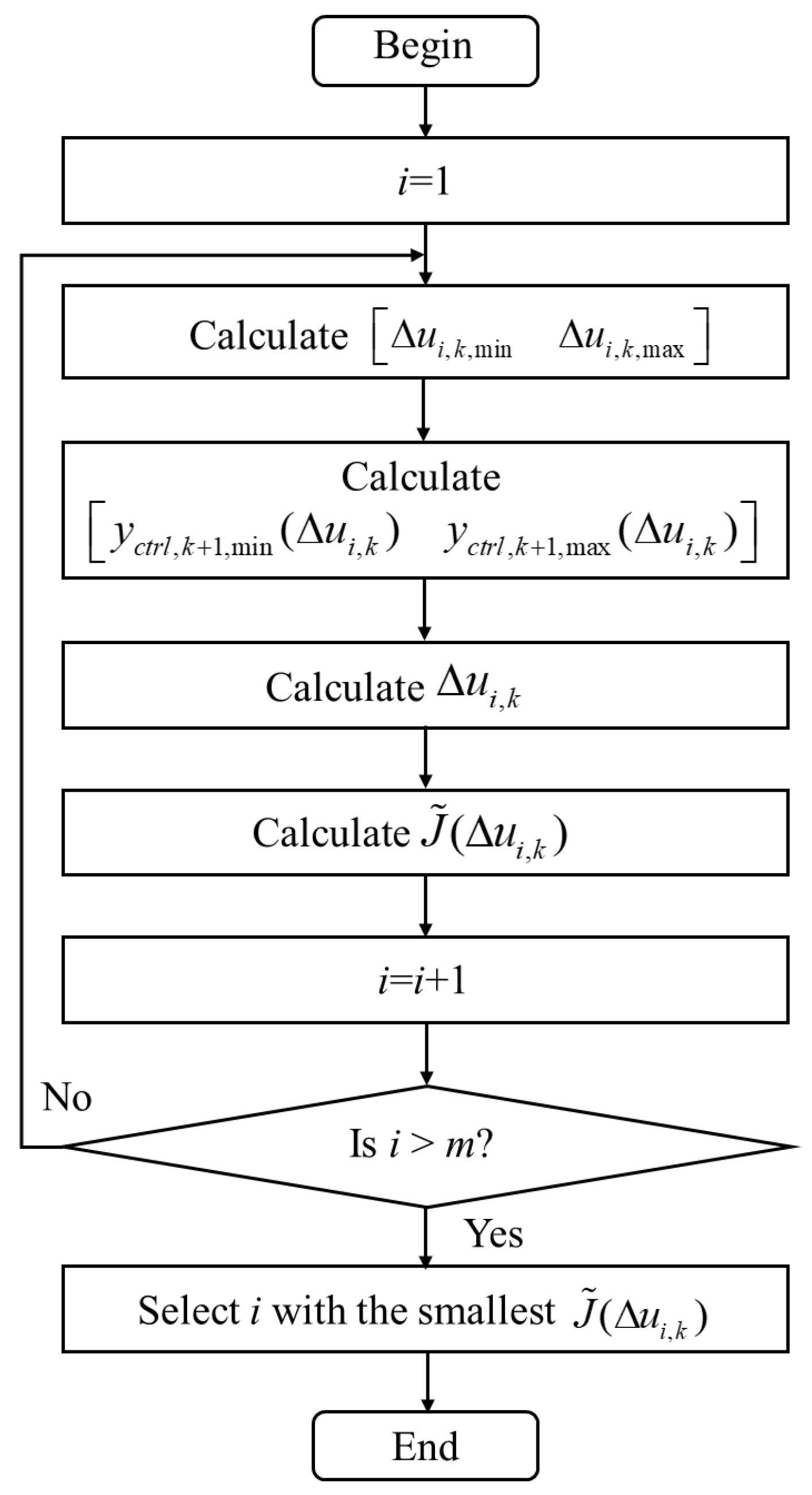
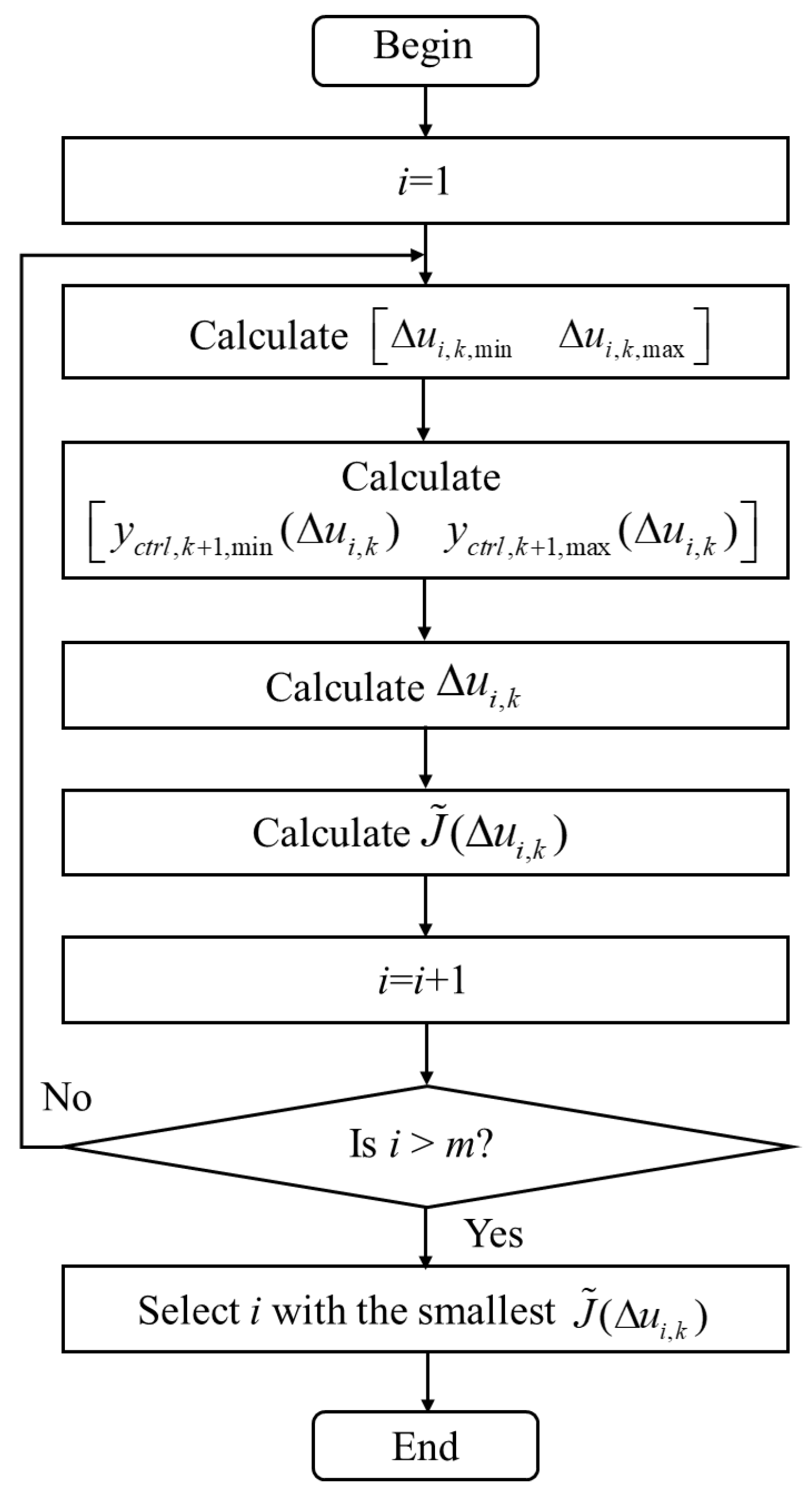
- Different from mMPC, a selection algorithm is designed in the scheme to determine the control variable with the best control effect at each sampling instant, which is an intelligent update mode and helps to enhance the control performance;
- (2)
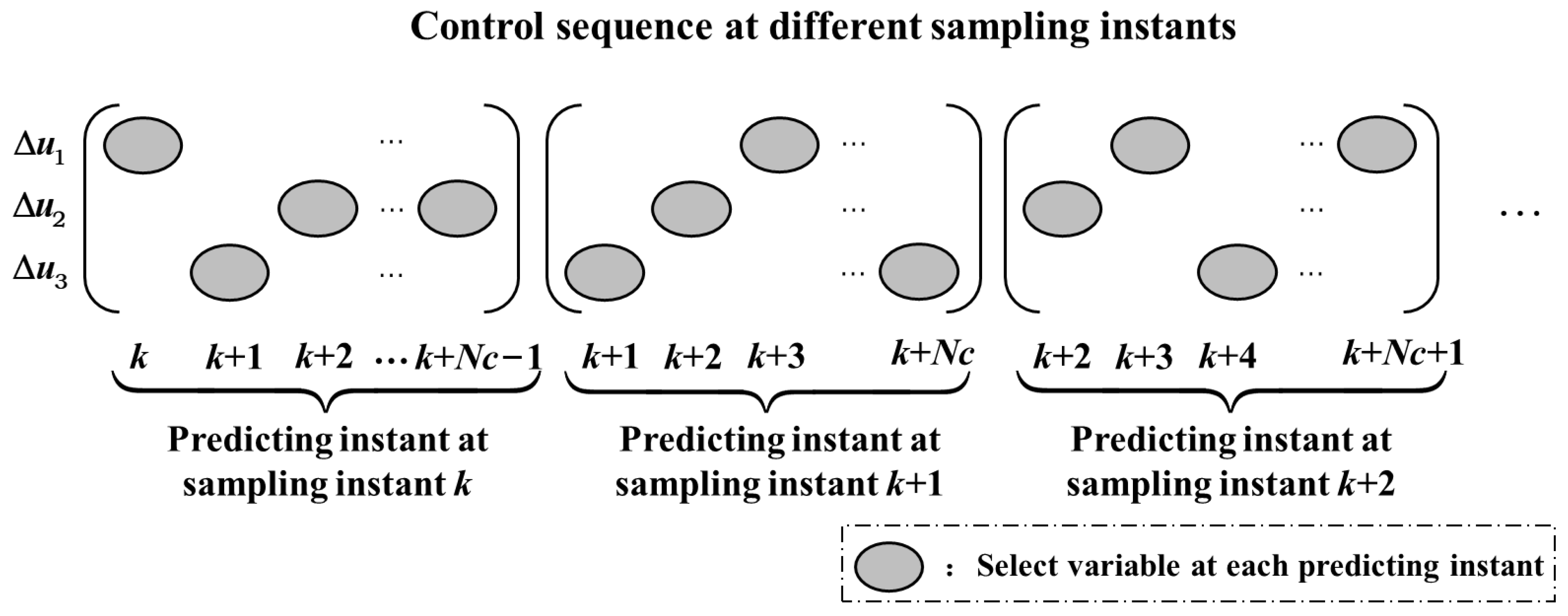
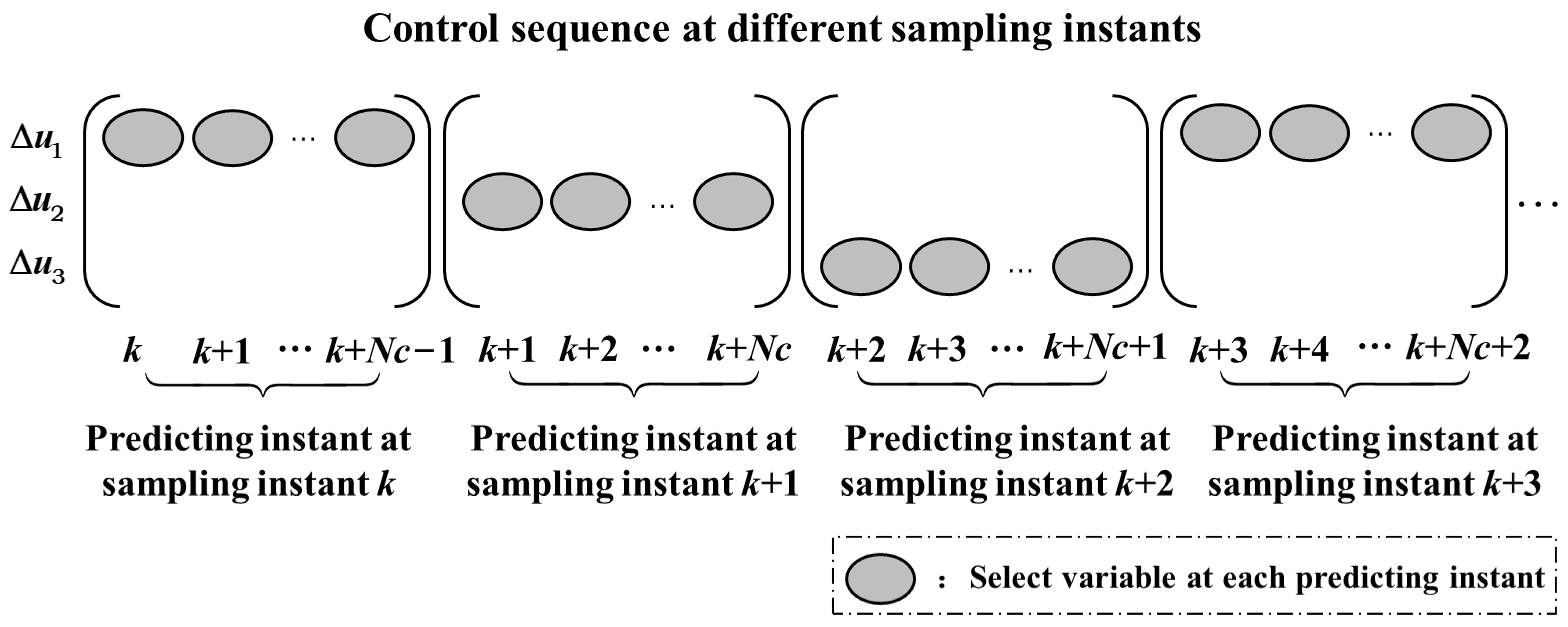
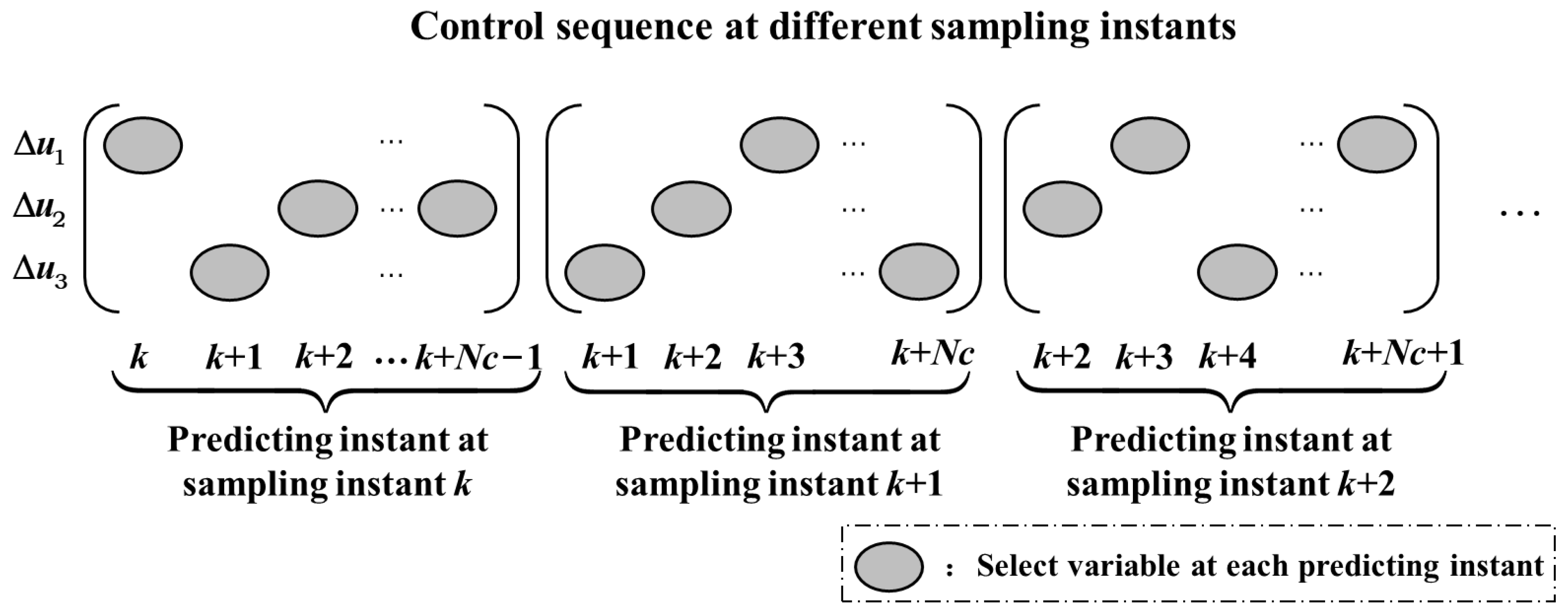
- To search for a better sub-optimal solution, a coordination strategy is developed in the scheme, which considers the interaction of the control variables at different predicting instants in the control sequence;
- (3)
- By constructing an optimization problem with low computational complexity, the intelligent reduced-dimensional scheme guarantees the superiority in time consumption.
2. MPC Intelligent Reduced-Dimensional Scheme
2.1. MPC Optimization Problem with Low Computational Complexity
2.2. Control Variable Selection Algorithm
2.3. Control Sequence Coordination Strategy
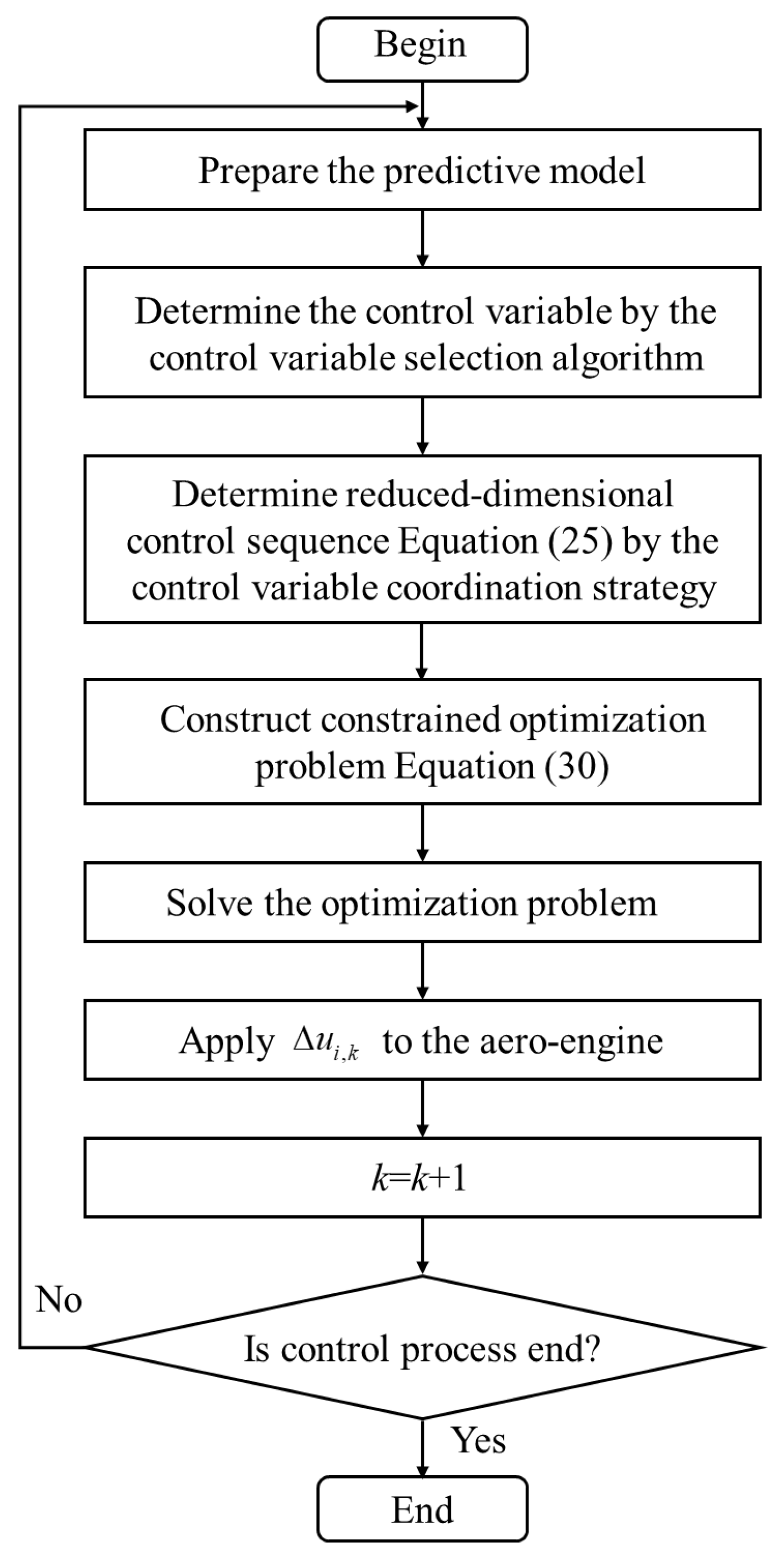
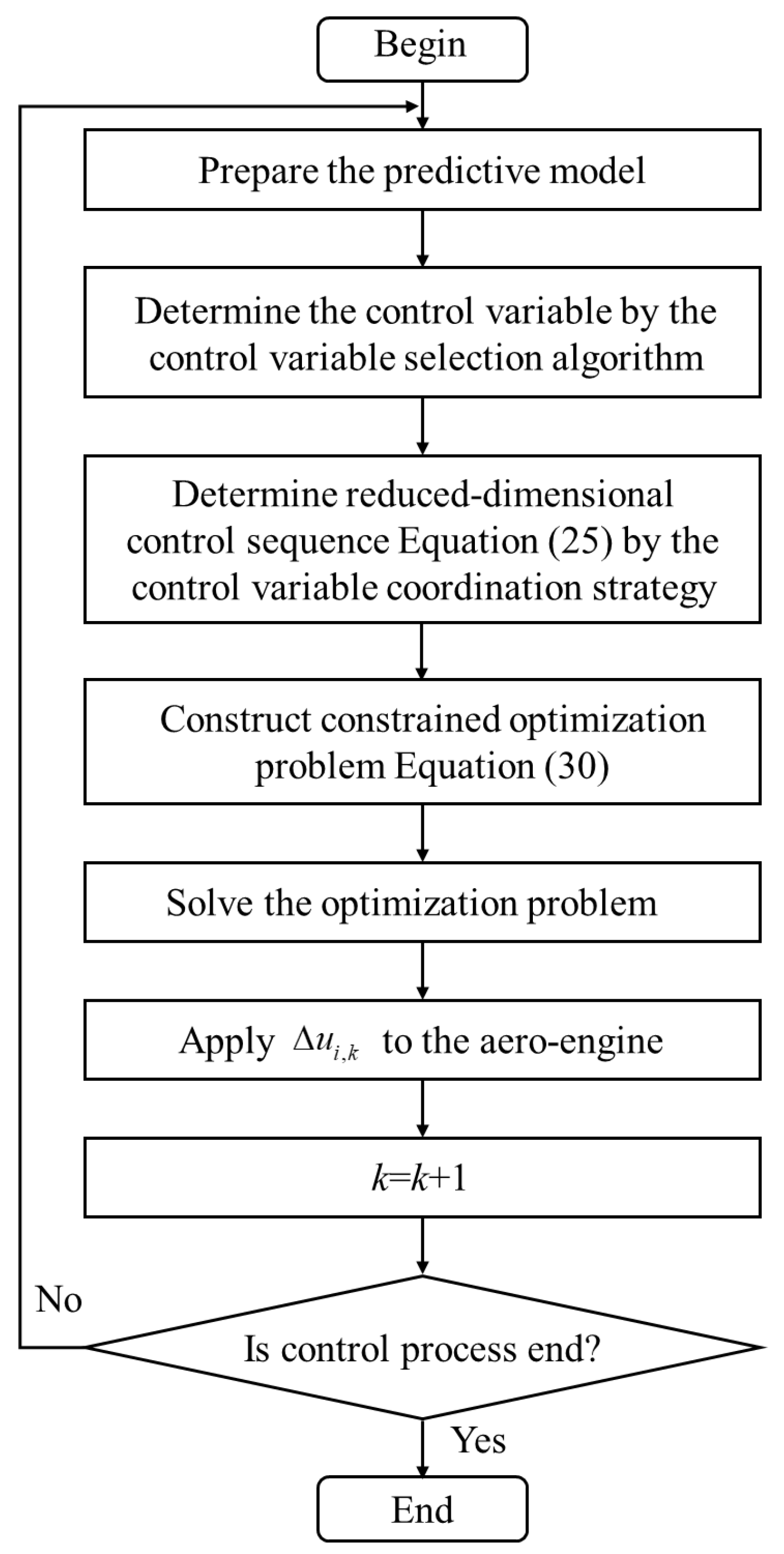
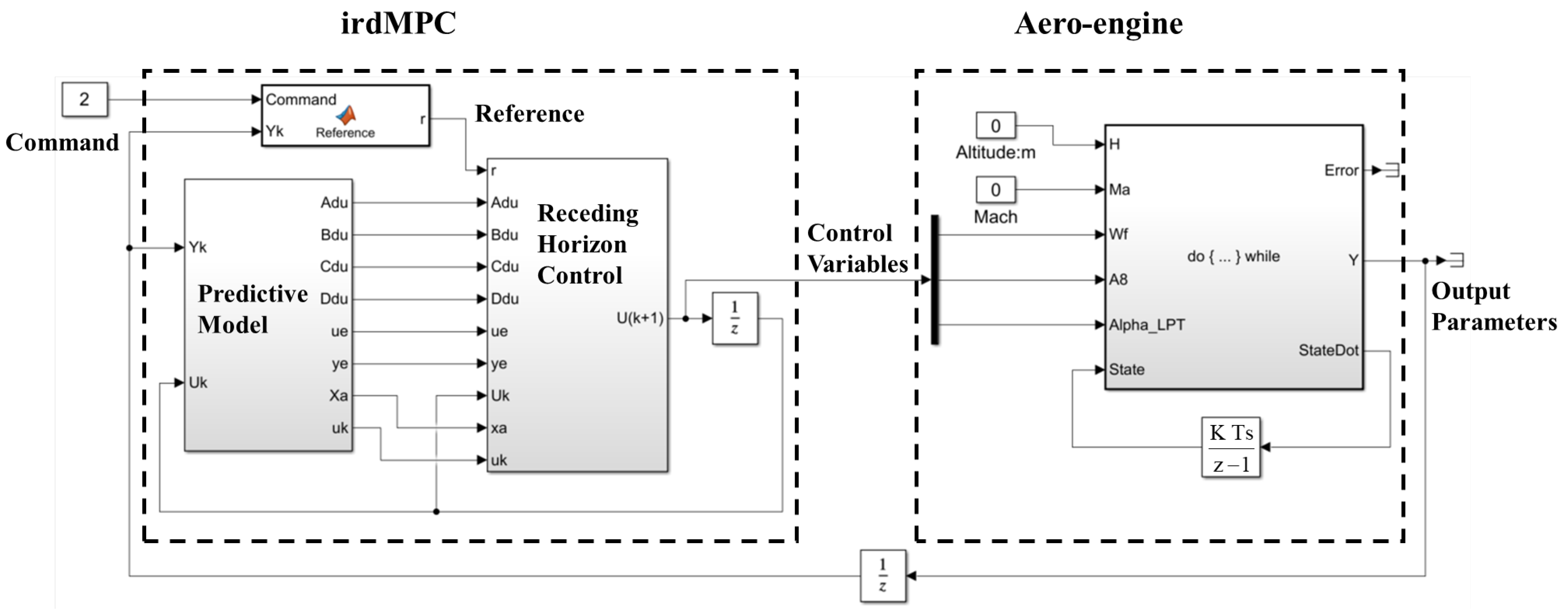
2.4. Intelligent Reduced-Dimensional MPC
3. Simulation and Discussion
3.1. Simulation Cases
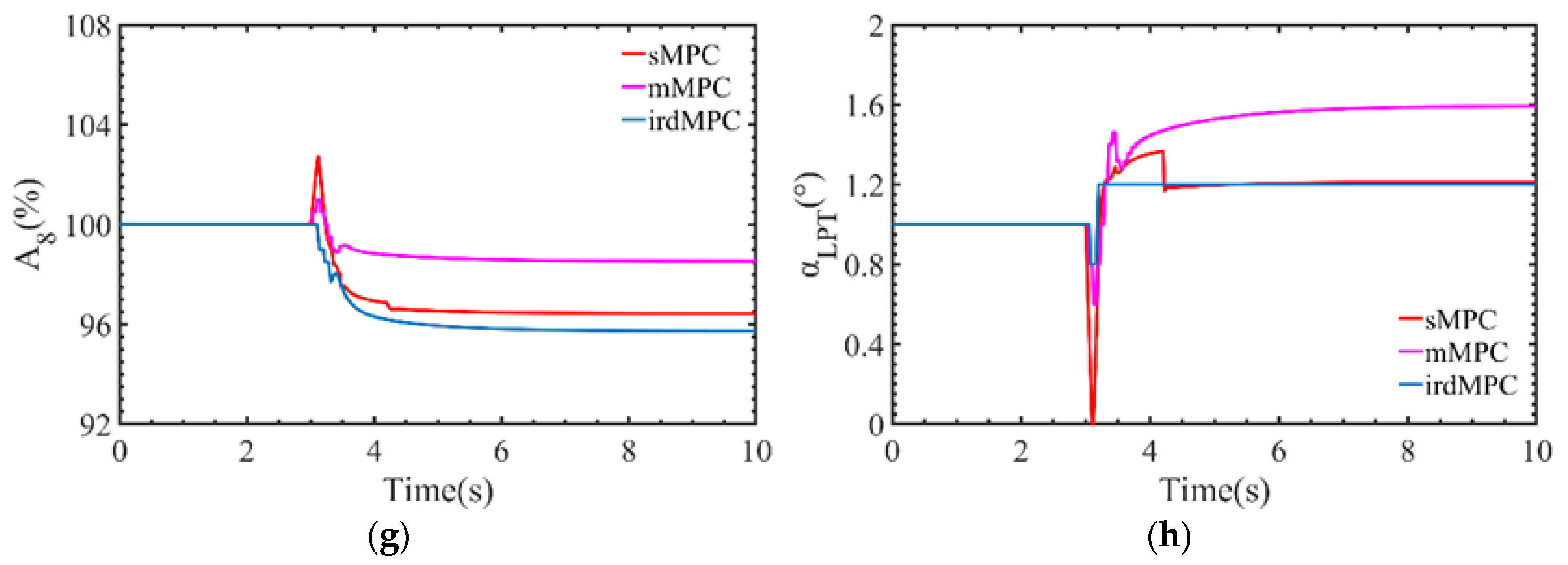
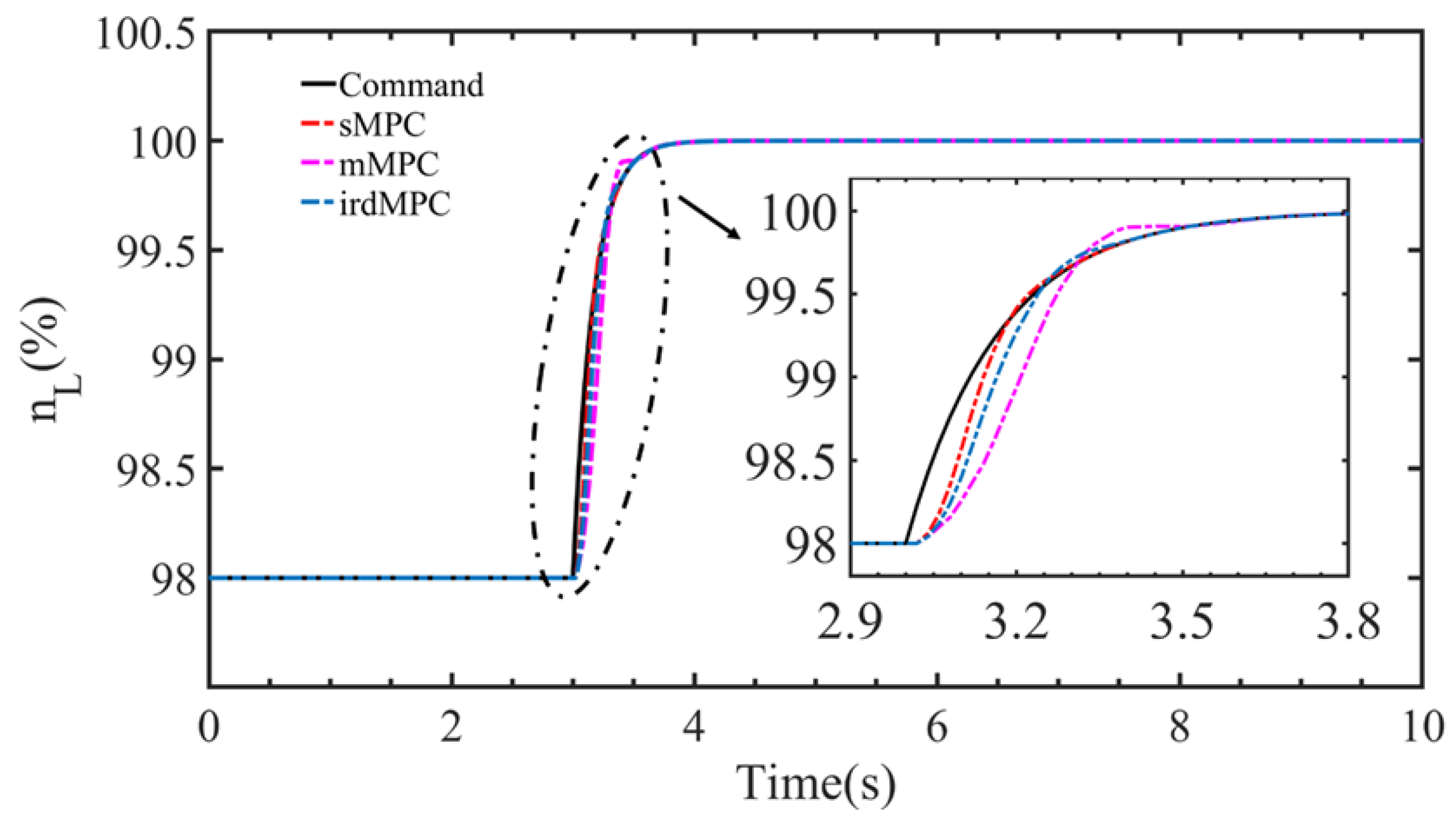
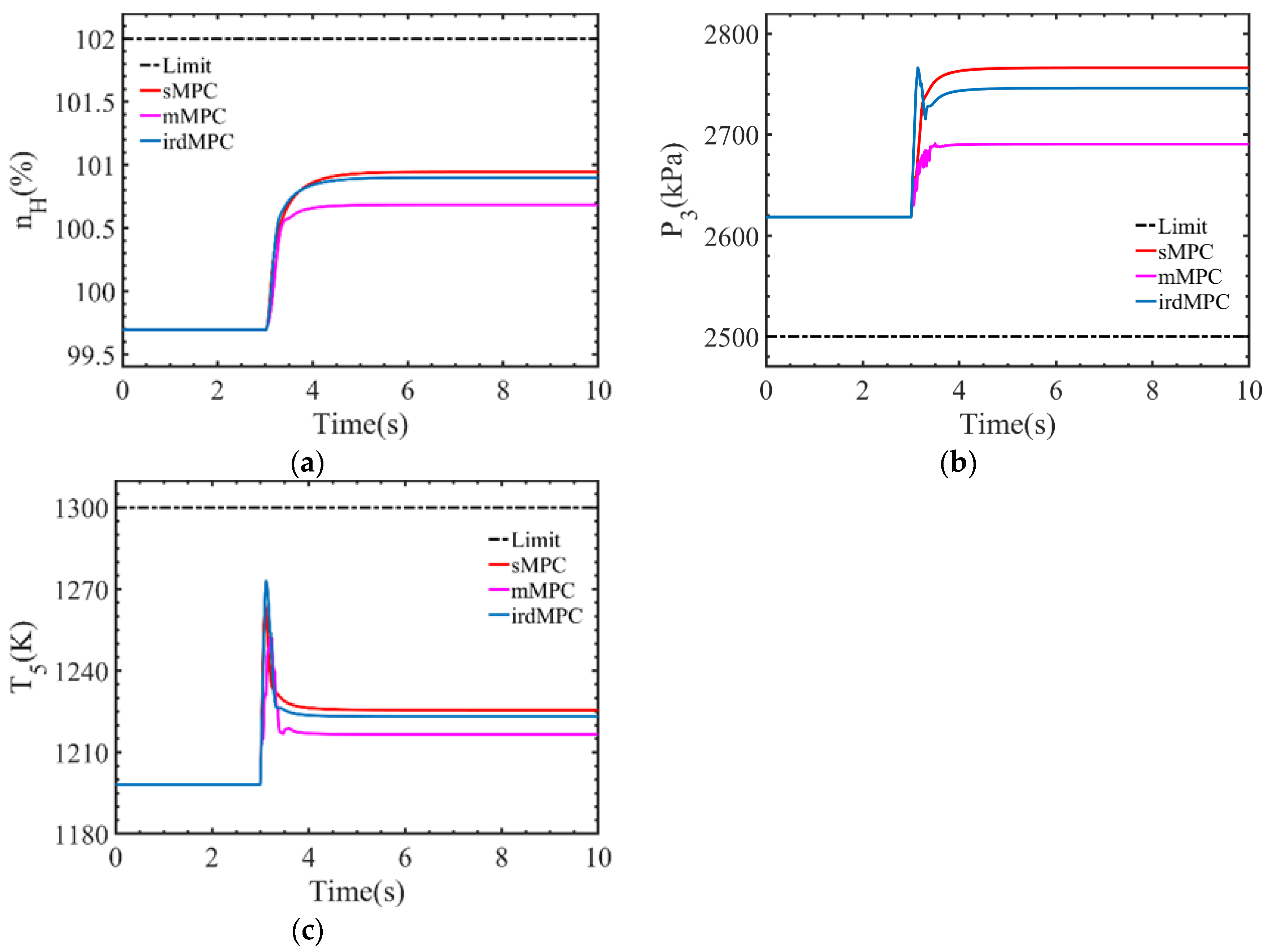
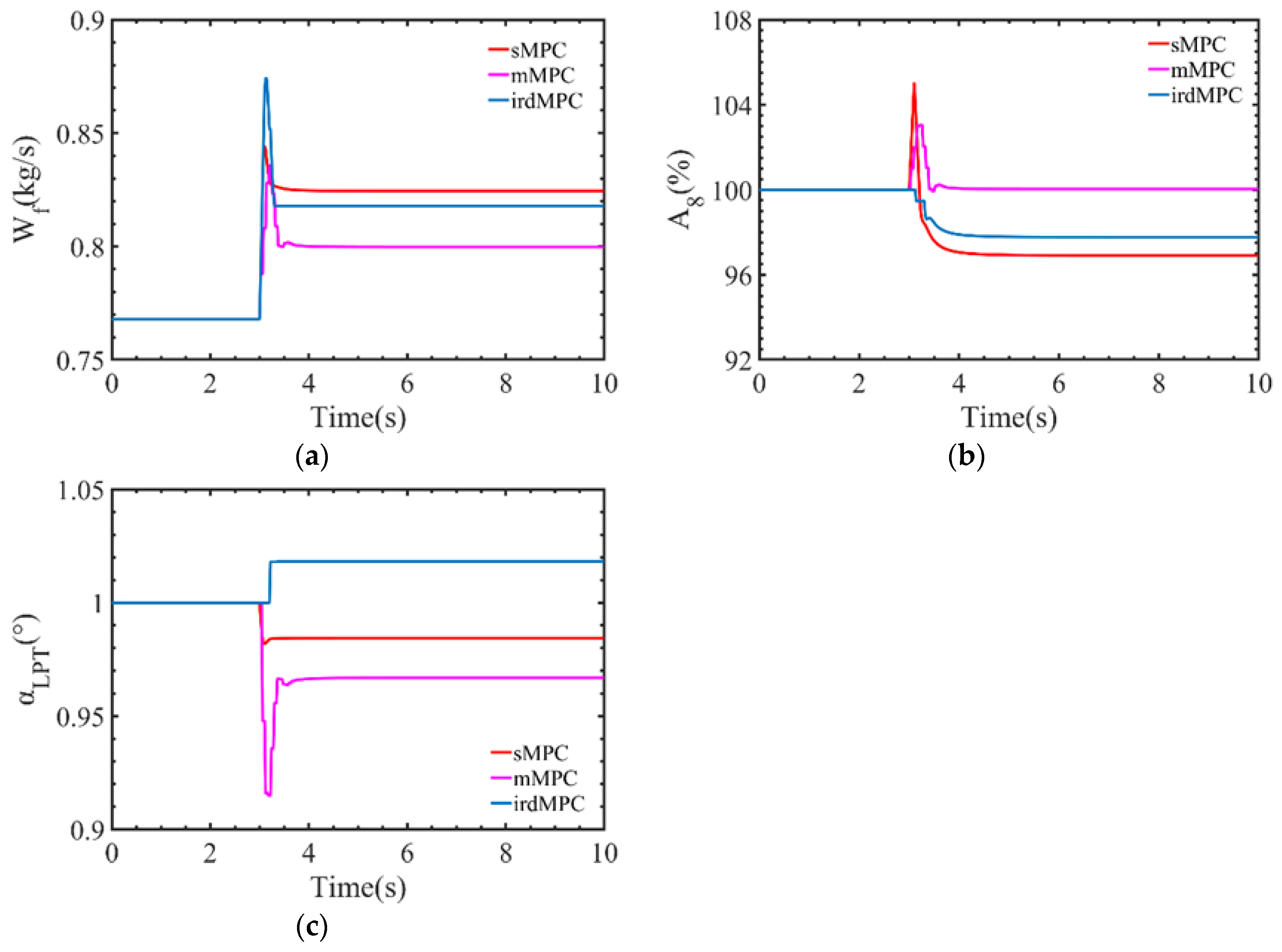
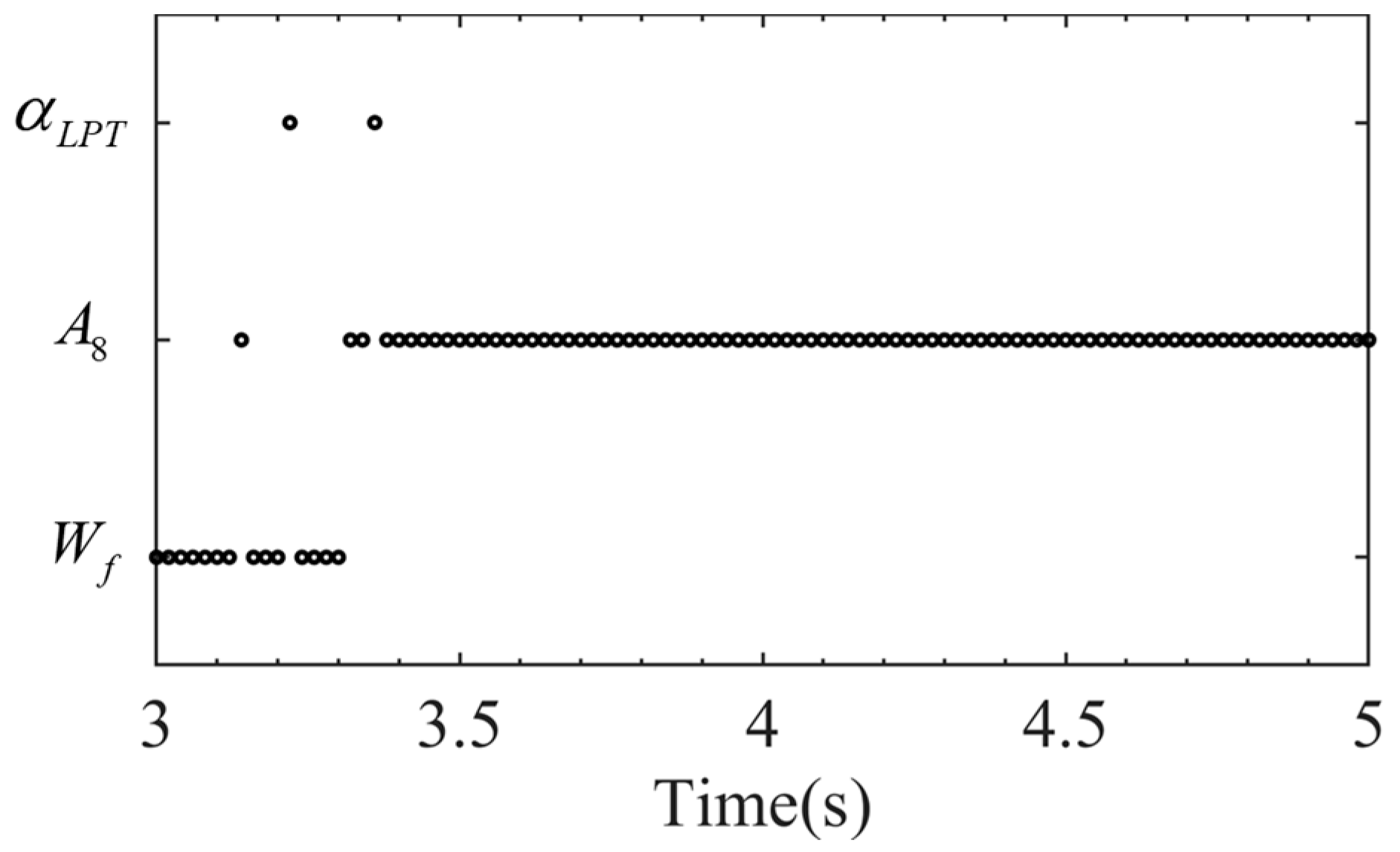
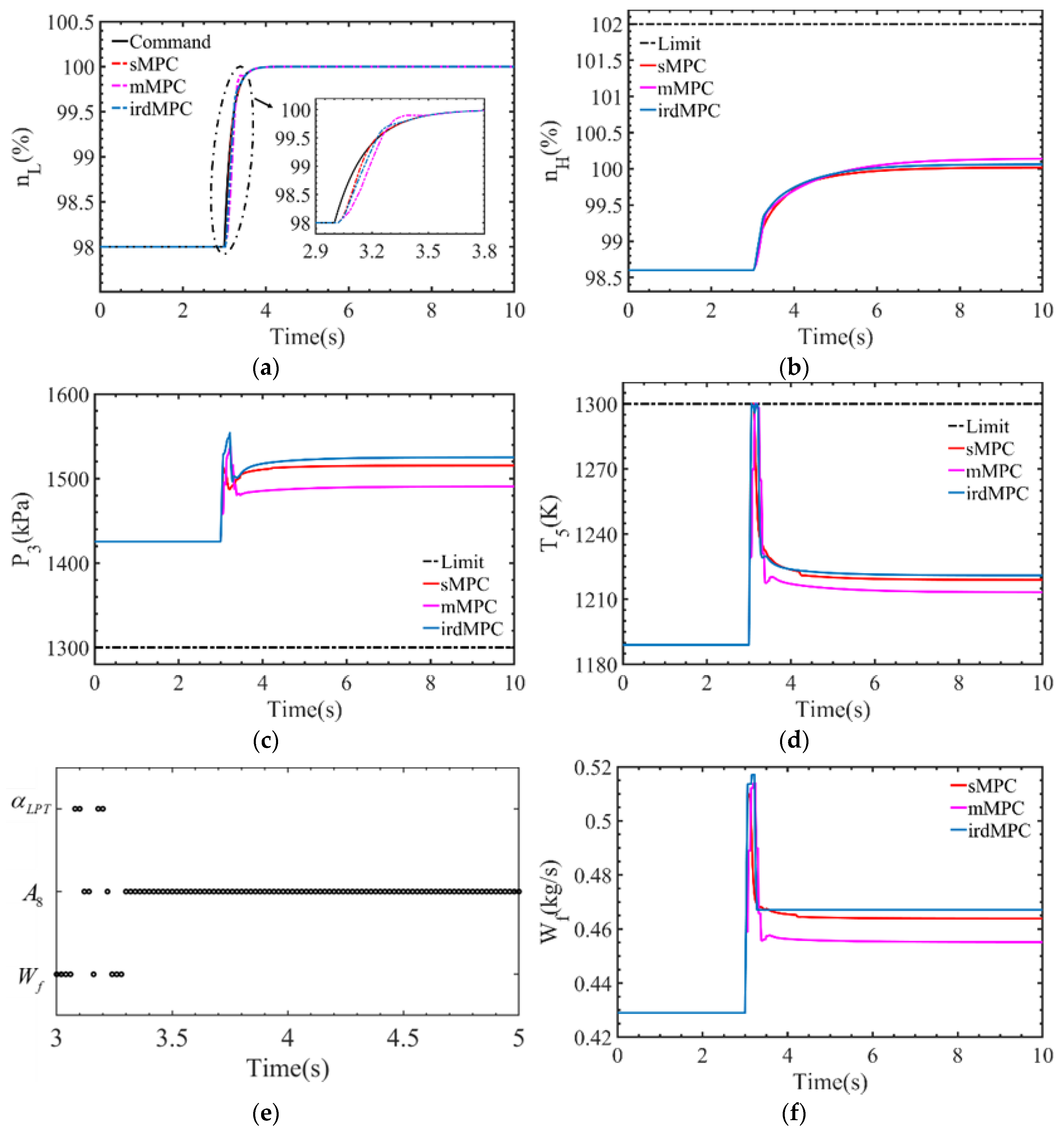
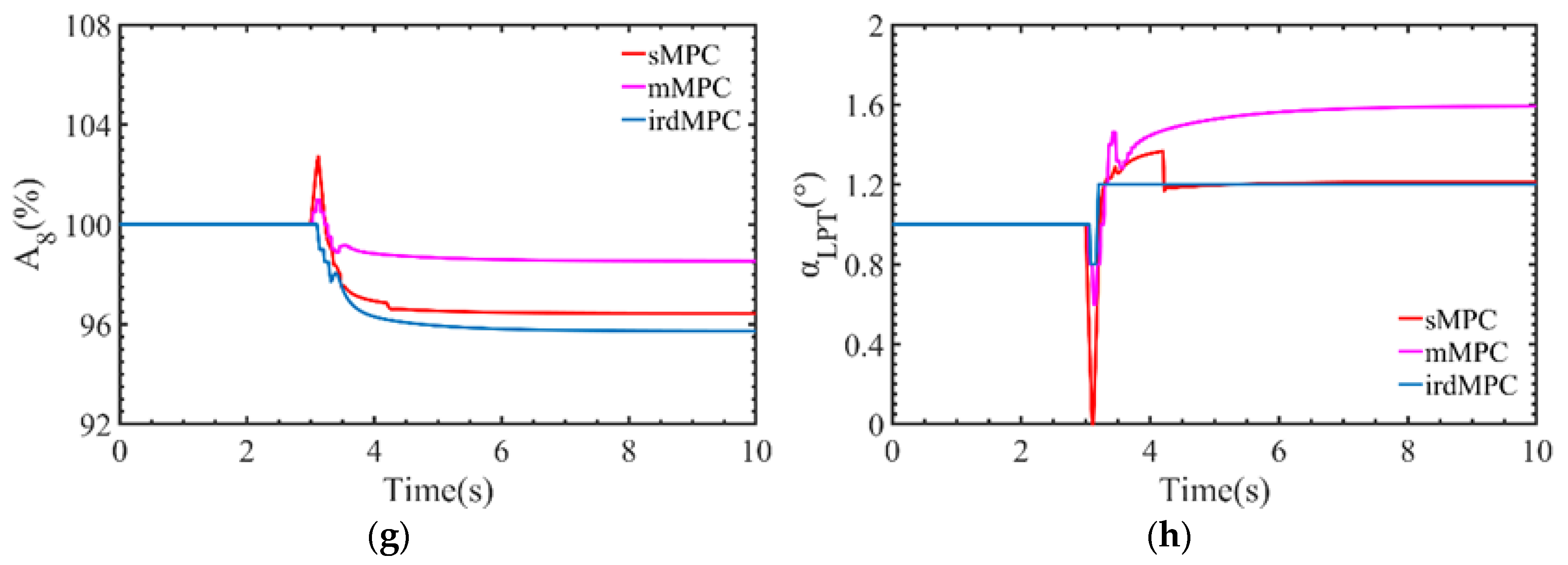
3.2. Control Effect Comparison
3.3. Time Consumption Comparison
3.4. Further Verification
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, X.; Yang, S.; Zhu, M.; Kong, X.X. Aeroengine Control Principles; Science Press: Beijing, China, 2021. [Google Scholar]
- Garg, S. Introduction to Advanced Engine Control Concepts; NASA Glenn Research Center: Cleveland, OH, USA, 2007.
- Zhu, Y.; Pan, M.; Zhou, W.; Huang, J. Intelligent direct thrust control for multivariable turbofan engine based on reinforcement and deep learning methods. Aerosp. Sci. Technol. 2022, 131, 107972. [Google Scholar] [CrossRef]
- Akpan, V.A.; Hassapis, G.D. Nonlinear model identification and adaptive model predictive control using neural networks. ISA Trans. 2011, 50, 177–194. [Google Scholar] [CrossRef] [PubMed]
- Bing, Y.U.; Zhouyang, L.I.; Hongwei, K.E.; Zhang, T. Wide-range model predictive control for aero-engine transient state. Chin. J. Aeronaut. 2022, 35, 246–260. [Google Scholar]
- Chen, Q.; Sheng, H.; Zhang, T. A novel direct performance adaptive control of aero-engine using subspace-based improved model predictive control. Aerosp. Sci. Technol. 2022, 128, 107760. [Google Scholar] [CrossRef]
- Richalet, J.; Rault, A.; Testud, J.L.; Papon, J. Model predictive heuristic control. Automatica 1978, 14, 413–428. [Google Scholar] [CrossRef]
- Cutler, C.R.; Ramaker, B.L. Dynamic matrix control—A computer control algorithm. In Proceedings of the Joint Automatic Control Conference, San Francisco, CA, USA, 13–15 August 1980; p. 72. [Google Scholar]
- Liu, J.; Wang, X.; Liu, X.; Zhu, M.; Pei, X.; Zhang, S.; Dan, Z. μ-Synthesis control with reference model for aeropropulsion system test facility under dynamic coupling and uncertainty. Chin. J. Aeronaut. 2023, 36, 246–261. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X.; Liu, X.; Zhu, M.; Pei, X.; Dan, Z.; Zhang, S. μ-Synthesis-based robust L1 adaptive control for aeropropulsion system test facility. Aerosp. Sci. Technol. 2023, 140, 108457. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X.; Liu, X.; Pei, X.; Dan, Z.; Zhang, S.; Yang, S.; Zhang, L. An anti-windup design with local sector and H2/H∞ optimization for flight environment simulation system. Aerosp. Sci. Technol. 2022, 128, 107787. [Google Scholar] [CrossRef]
- Richter, H. Advanced Control of Turbofan Engines; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Brunell, B.J.; Viassolo, D.E.; Prasanth, R. Model adaptation and nonlinear model predictive control of an aircraft engine. In Proceedings of the Turbo Expo: Power for Land, Sea, and Air, Vienna, Austria, 14–17 June 2004; pp. 673–682. [Google Scholar]
- Wang, Y.; Huang, J.; Zhou, W.; Lu, F.; Hu, W. Neural network-based model predictive control with fuzzy-SQP optimization for direct thrust control of turbofan engine. Chin. J. Aeronaut. 2022, 35, 59–71. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, Q.G.; Du, Z.Y.; Zhang, H. Research on nonlinear model predictive control for turboshaft engines based on double engines torques matching. Chin. J. Aeronaut. 2020, 33, 176–186. [Google Scholar] [CrossRef]
- Nikolaidis, T.; Li, Z.; Jafari, S. Advanced constraints management strategy for real-time optimization of gas turbine engine transient performance. Appl. Sci. 2019, 9, 5333. [Google Scholar] [CrossRef]
- Boyd, S.P.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Kochenderfer, M.J.; Wheeler, T.A. Algorithms for Optimization; MIT Press: Cambridge, MA, USA, 2019. [Google Scholar]
- Bemporad, A.; Morari, M.; Dua, V.; Pistikopoulos, E.N. The explicit solution of model predictive control via multiparametric quadratic programming. In Proceedings of the 2000 American Control Conference, ACC (IEEE Cat. No. 00CH36334), Chicago, IL, USA, 28–30 June 2000; IEEE: Piscataway, NJ, USA, 2000; Volume 2, pp. 872–876. [Google Scholar]
- Tøndel, P.; Johansen, T.A.; Bemporad, A. An algorithm for multi-parametric quadratic programming and explicit MPC solutions. Automatica 2003, 39, 489–497. [Google Scholar] [CrossRef]
- Alessio, A.; Bemporad, A. A survey on explicit model predictive control. In Nonlinear Model Predictive Control: Towards New Challenging Applications; Springer: Berlin/Heidelberg, Germany, 2009; pp. 345–369. [Google Scholar]
- Gu, N.; Wang, X.; Zhu, M. Multi-Parameter Quadratic Programming Explicit Model Predictive Based Real Time Turboshaft Engine Control. Energies 2021, 14, 5539. [Google Scholar] [CrossRef]
- Feng, C.; Du, X.; Yang, B. Design of Turbofan Engine Controller Based on Explicit Predictive Control. J. Propuls. Technol. 2022, 6, 043. [Google Scholar]
- Lewis, F.L.; Vrabie, D.; Syrmos, V.L. Optimal Control; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Genceli, H.; Nikolaou, M. Robust stability analysis of constrained l1-norm model predictive control. AIChE J. 1993, 39, 1954–1965. [Google Scholar] [CrossRef]
- Kerrigan, E.C.; Maciejowski, J.M. Robustly stable feedback min-max model predictive control. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; IEEE: Piscataway, NJ, USA, 2003; Volume 4, pp. 3490–3495. [Google Scholar]
- Ling, K.V.; Maciejowski, J.; Richards, A.; Wu, B.F. Multiplexed model predictive control. Automatica 2012, 48, 396–401. [Google Scholar] [CrossRef]
- Wang, X.Q.; Ho, W.K.; Ling, K.V. Computational load comparison of multiplexed and standard model predictive control. In Proceedings of the 2018 4th International Conference on Mechatronics and Robotics Engineering, Valenciennes, France, 7–11 February 2018; pp. 17–22. [Google Scholar]
- Ling, K.V.; Maciejowski, J.; Wu, B.F. Multiplexed model predictive control. IFAC Proc. Vol. 2005, 38, 574–579. [Google Scholar] [CrossRef]
- Ling, K.V.; Ho, W.K.; Wu, B.F.; Lo, A.; Yan, H. Multiplexed MPC for multizone thermal processing in semiconductor manufacturing. IEEE Trans. Control Syst. Technol. 2009, 18, 1371–1380. [Google Scholar] [CrossRef]
- Richter, H.; Singaraju, A.V.; Litt, J.S. Multiplexed predictive control of a large commercial turbofan engine. J. Guid. Control Dyn. 2008, 31, 273–281. [Google Scholar] [CrossRef]
- Pang, S.; Jafari, S.; Nikolaidis, T.; Qiuhong, L.I. Reduced-dimensional MPC controller for direct thrust control. Chin. J. Aeronaut. 2022, 35, 66–81. [Google Scholar] [CrossRef]
- Pang, S.; Li, Q.; Ni, B. Improved nonlinear MPC for aircraft gas turbine engine based on semi-alternative optimization strategy. Aerosp. Sci. Technol. 2021, 118, 106983. [Google Scholar] [CrossRef]
- Liu, Z.W.; Wang, Z.X.; Huang, H.C.; Cai, J.H. Numerical simulation on performance of variable cycle engines. J. Aero-Space Power 2010, 25, 1310–1315. [Google Scholar]
- Wang, Y.; Zhang, P.P.; Li, Q.H.; Huang, X.H. Research and validation of variable cycle engine modeling method. J. Aerosp. Power 2014, 29, 2643–2651. [Google Scholar]
- Kurzke, J. GasTurb 12: Design and Off-Design Performance of Gas Turbines; Mtu: Munich, Germany, 2012. [Google Scholar]
- Du, X. Application of Sliding Mode Control and Model Predictive Control to Limit Management for Aero-Engines; Northwestern Polytechnical University: Xi’an, China, 2016. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Initial Steady-State Value | Magnitude Limit | Rate Limit | Unit | |
|---|---|---|---|---|---|
| Output | 98 | % | |||
| 99.7 | % | ||||
| 2618.4 | kPa | ||||
| 1198.2 | K | ||||
| Control variable | 0.768 | 0.03/ | kg/s | ||
| 100 | 0.5/ | % | |||
| 1 | 0.2/ | ° | |||
| Parameters | Initial Steady-State Value | Magnitude Limit | Rate Limit | Unit | |
|---|---|---|---|---|---|
| Output | 98 | % | |||
| 98.6 | % | ||||
| 1425.4 | kPa | ||||
| 1189 | K | ||||
| Control variable | 0.429 | 0.03/ | kg/s | ||
| 100 | 0.5/ | % | |||
| 1 | 0.2/ | ° | |||
| sMPC | mMPC | irdMPC | |
|---|---|---|---|
| RMSE (×10−2) | 3.8146 | 8.046 | 5.3057 |
| Nc | (ms) | ||
|---|---|---|---|
| sMPC | mMPC | irdMPC | |
| 3 | 6.3461 | 4.858 | 4.9351 |
| 4 | 7.4579 | 4.9323 | 5.1989 |
| 5 | 9.1945 | 5.0723 | 5.4687 |
| 6 | 11.111 | 5.2522 | 5.6339 |
| 7 | 13.2113 | 5.3438 | 5.8783 |
| 8 | 15.2596 | 5.5492 | 6.008 |
| 9 | 17.4286 | 5.6789 | 6.148 |
| Sampling Instant | t (ms) | ||
|---|---|---|---|
| sMPC | mMPC | irdMPC | |
| k + 1 | 9.1861 | 5.2361 | 4.8048 |
| k + 2 | 8.3069 | 5.3285 | 6.2879 |
| k + 3 | 9.2412 | 4.9081 | 6.1662 |
| k + 4 | 9.6713 | 4.9276 | 5.6472 |
| k + 5 | 13.01 | 5.7536 | 4.8898 |
| k + 6 | 10.3904 | 5.104 | 6.2612 |
| k + 7 | 7.2827 | 5.2765 | 5.421 |
| k + 8 | 7.7749 | 4.976 | 5.3001 |
| k + 9 | 9.7422 | 4.8451 | 5.6359 |
| Nc | (ms) | ||
|---|---|---|---|
| sMPC | mMPC | irdMPC | |
| 3 | 6.3336 | 5.0491 | 5.1505 |
| 4 | 8.0574 | 5.0809 | 5.3599 |
| 5 | 9.8516 | 5.1691 | 5.603 |
| 6 | 11.8859 | 5.4101 | 5.7942 |
| 7 | 14.5266 | 5.4756 | 5.9671 |
| 8 | 16.6374 | 5.6881 | 6.1405 |
| 9 | 19.3425 | 5.8344 | 6.2934 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Z.; Wang, X.; Liu, J.; Gu, N.; Liu, W. Intelligent Reduced-Dimensional Scheme of Model Predictive Control for Aero-Engines. Actuators 2024, 13, 140. https://doi.org/10.3390/act13040140
Jiang Z, Wang X, Liu J, Gu N, Liu W. Intelligent Reduced-Dimensional Scheme of Model Predictive Control for Aero-Engines. Actuators. 2024; 13(4):140. https://doi.org/10.3390/act13040140
Chicago/Turabian StyleJiang, Zhen, Xi Wang, Jiashuai Liu, Nannan Gu, and Wei Liu. 2024. "Intelligent Reduced-Dimensional Scheme of Model Predictive Control for Aero-Engines" Actuators 13, no. 4: 140. https://doi.org/10.3390/act13040140
APA StyleJiang, Z., Wang, X., Liu, J., Gu, N., & Liu, W. (2024). Intelligent Reduced-Dimensional Scheme of Model Predictive Control for Aero-Engines. Actuators, 13(4), 140. https://doi.org/10.3390/act13040140