Design of an Electromagnetic Linear Drive with Permanent Magnetic Weight Compensation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
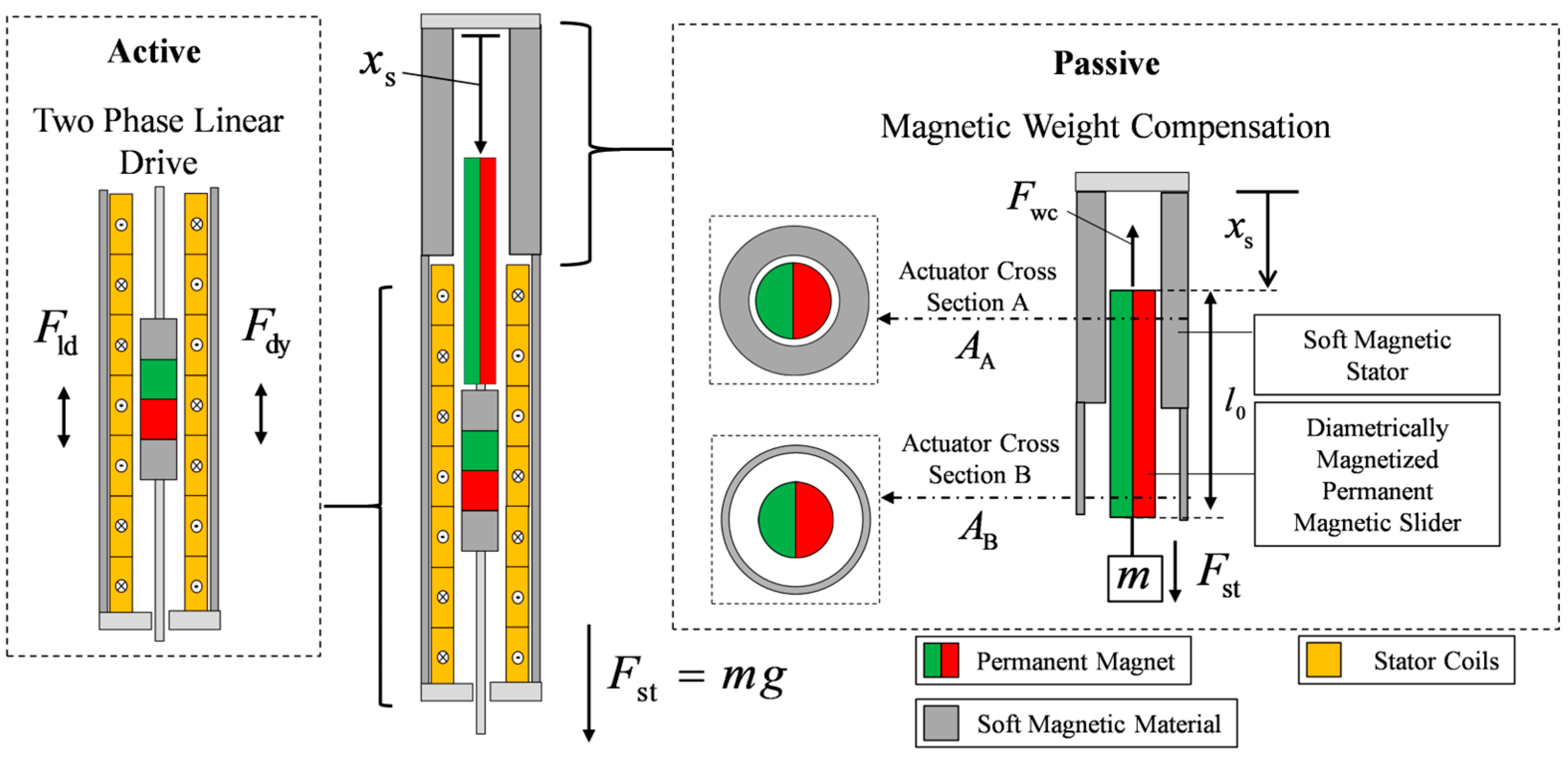
2. Analytic Modeling of a Weight-Compensated Linear Direct Drive
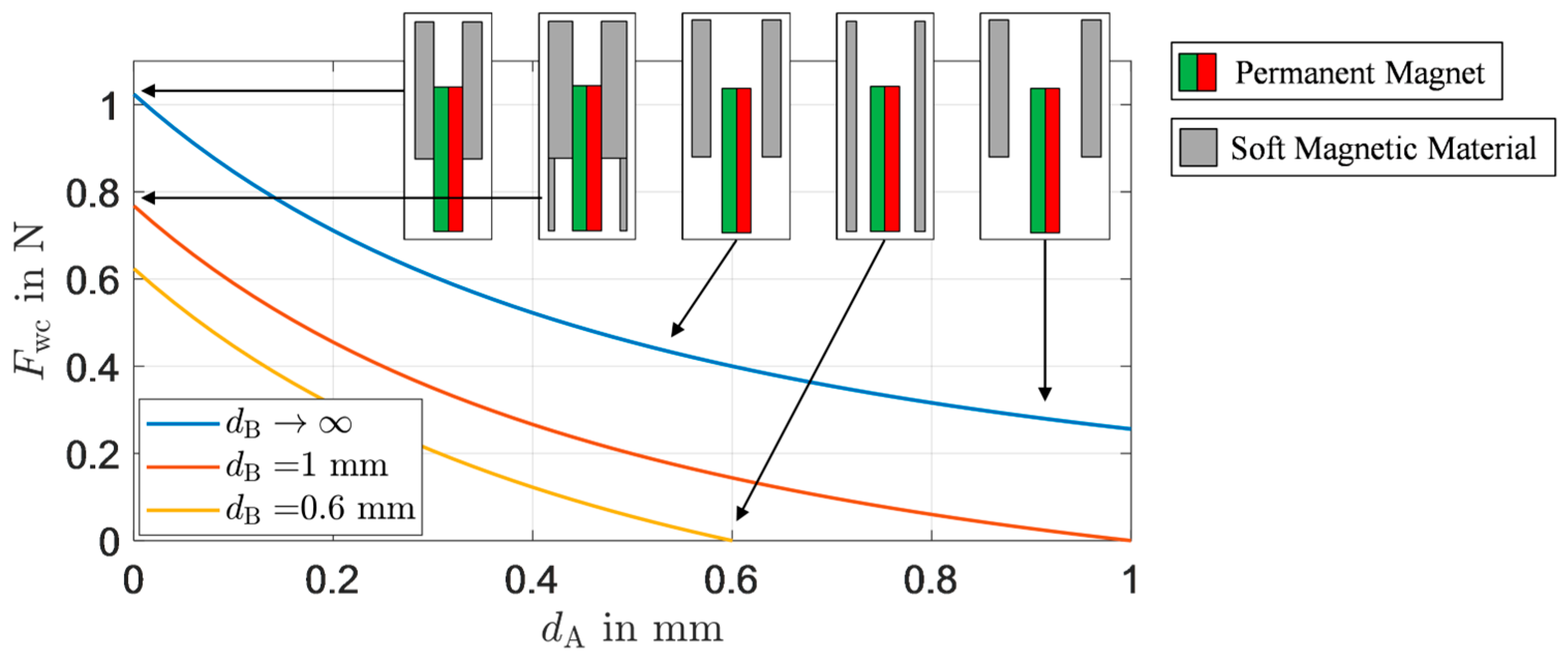
2.1. Analytic Modeling of Magnetic Weight Compensation
- -
- neglect axial magnetic flux,
- -
- assume constant diametrical magnetization of the permanent magnet,
- -
- regard the soft magnetic material as an ideal magnetic conductor,
- -
- neglect saturation effects.
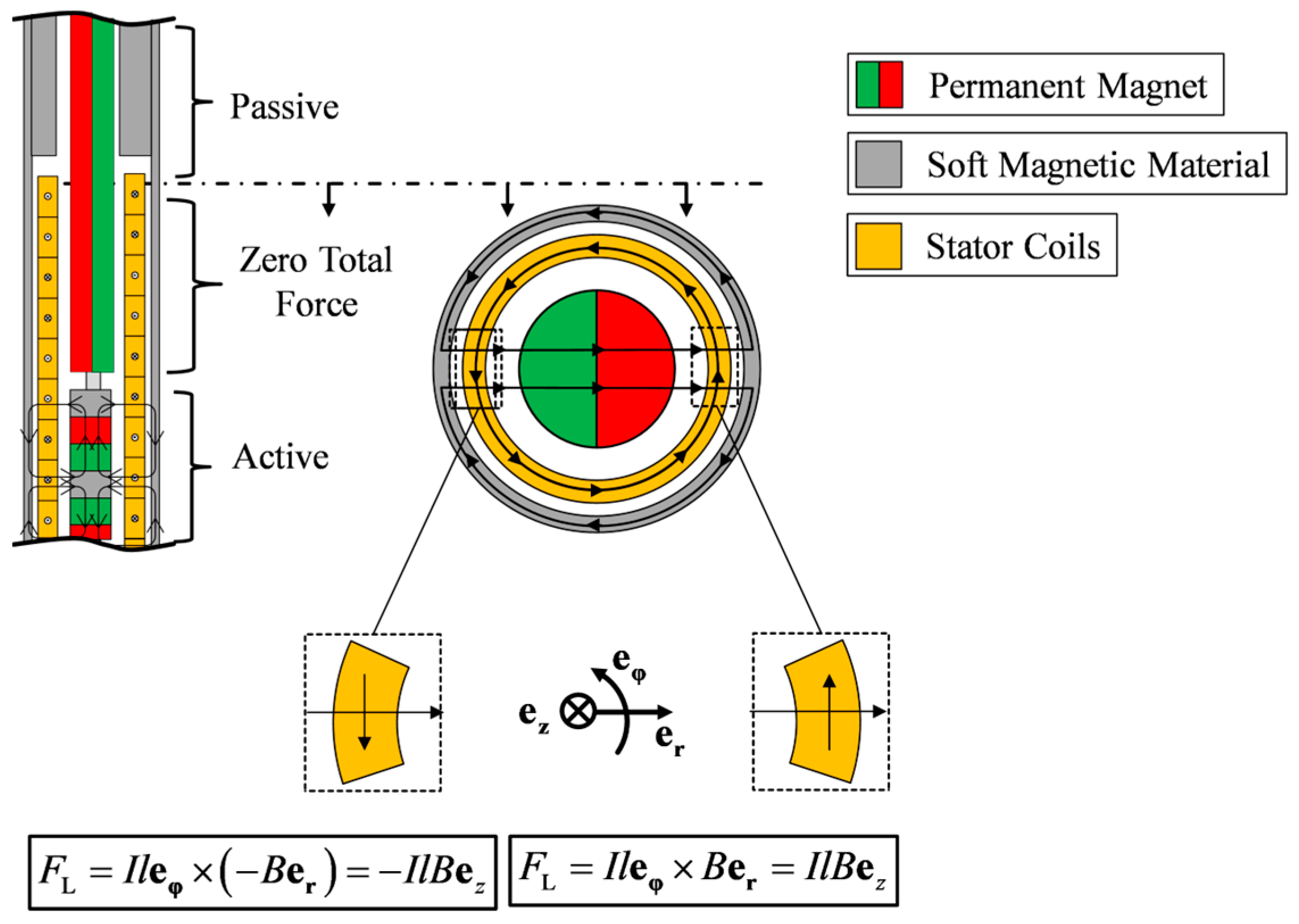
2.2. Analytic Modeling and Integration of the Two-Phase Linear Drive
3. Design and Experimental Validation
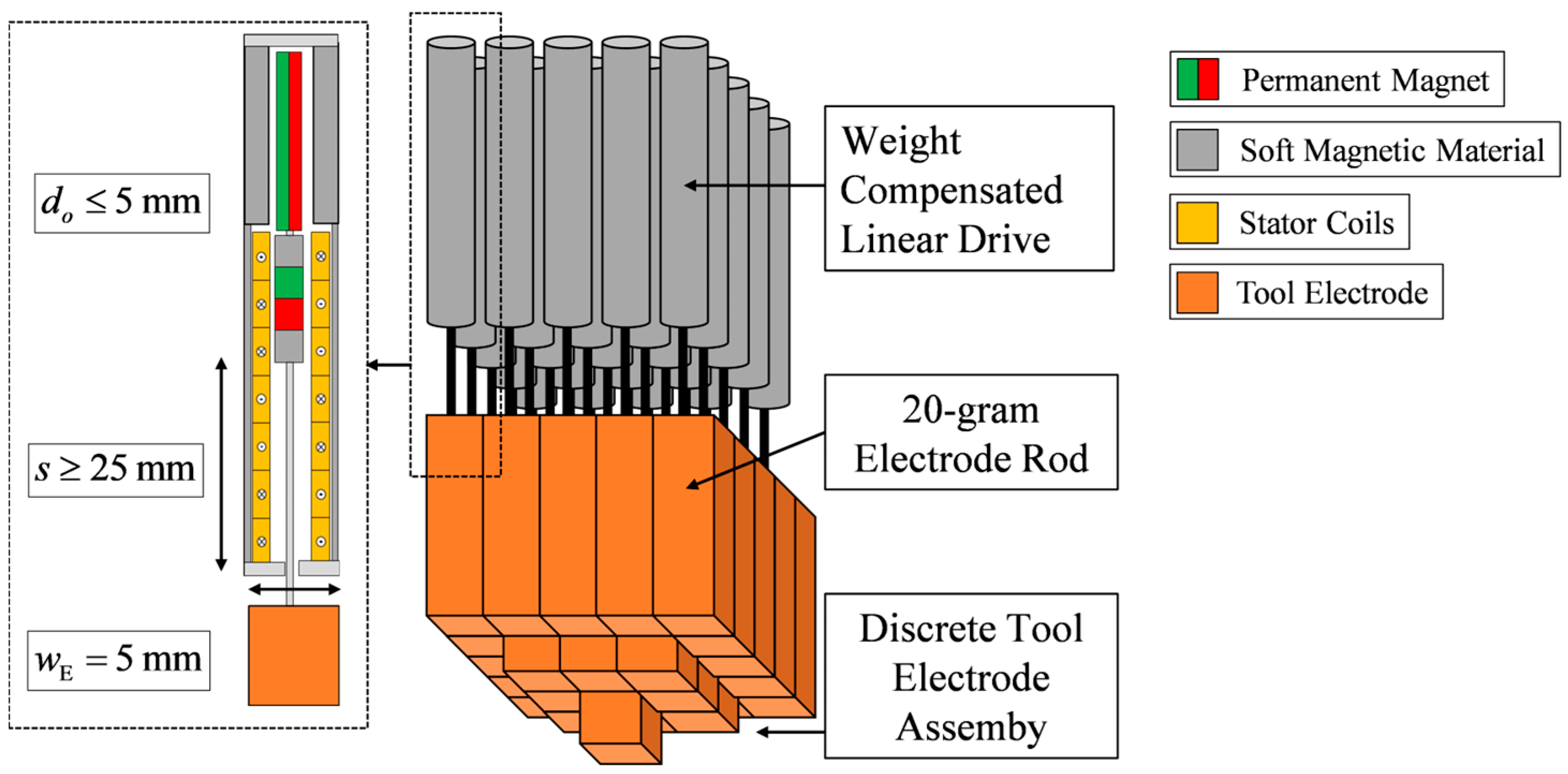
3.1. Application for a Weight-Compensated Linear Drive—Automated Electrical Discharge Machining
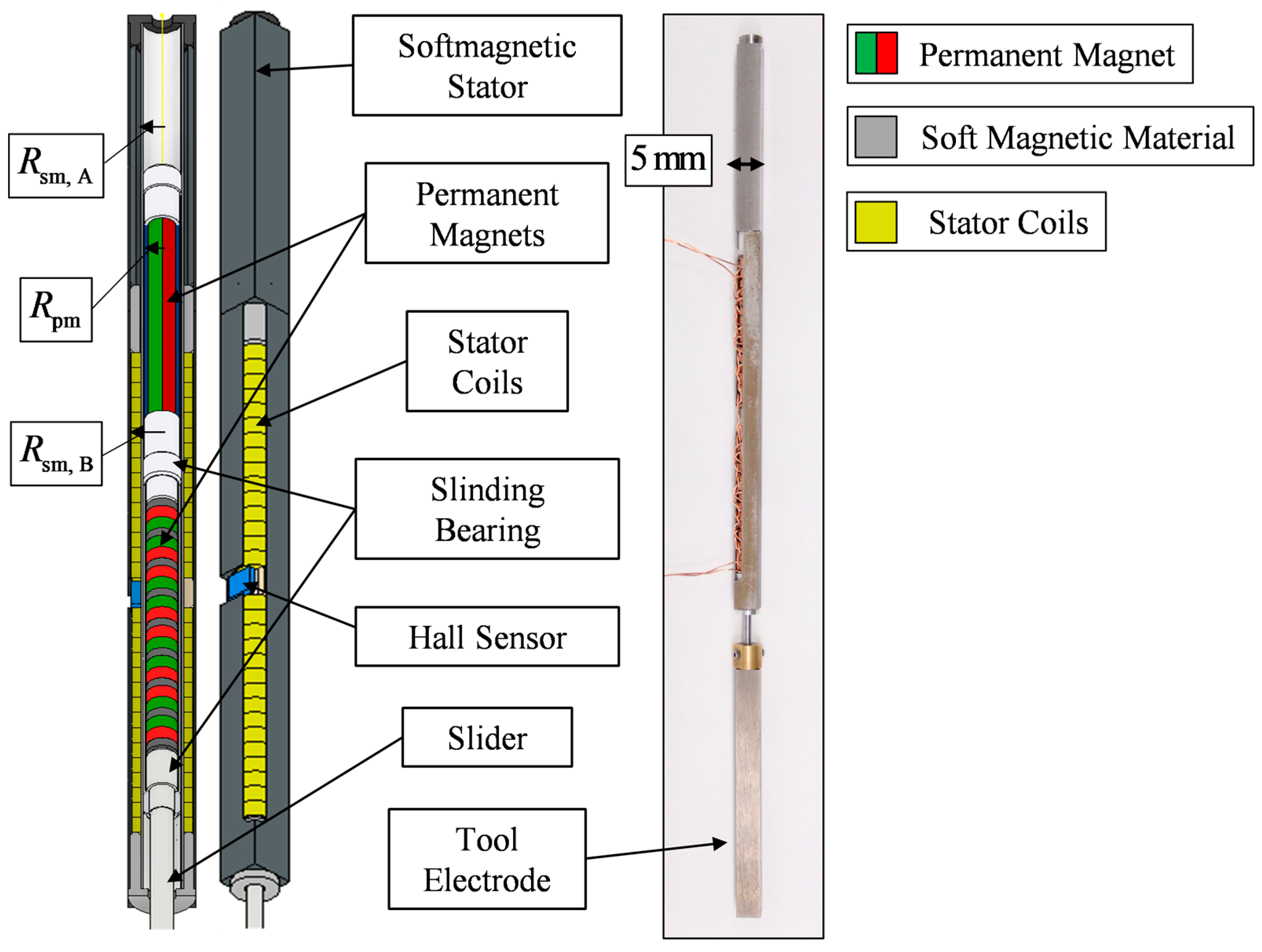
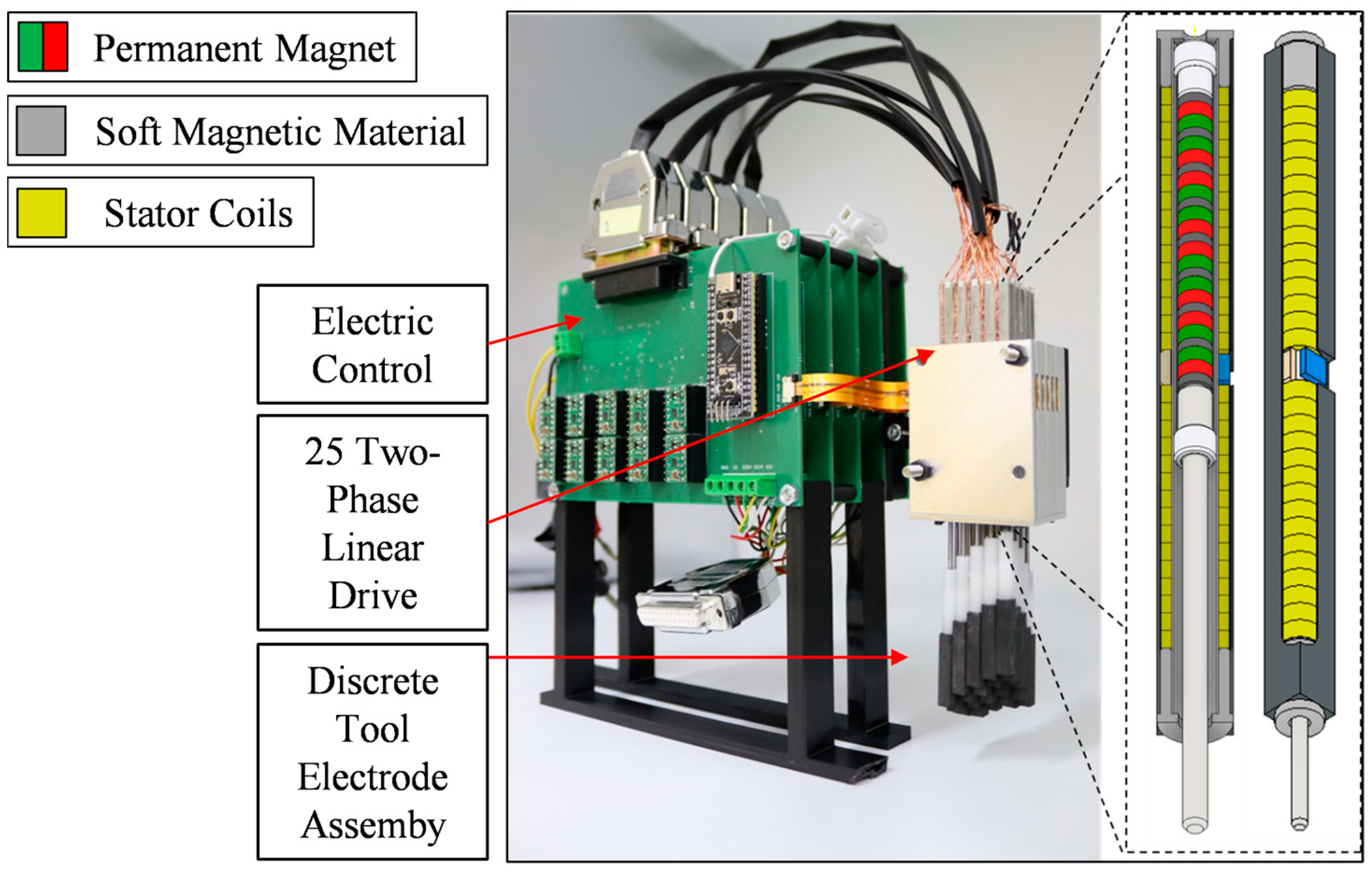
3.2. Design of the Weight-Compensated Linear Drive for the EDM Process
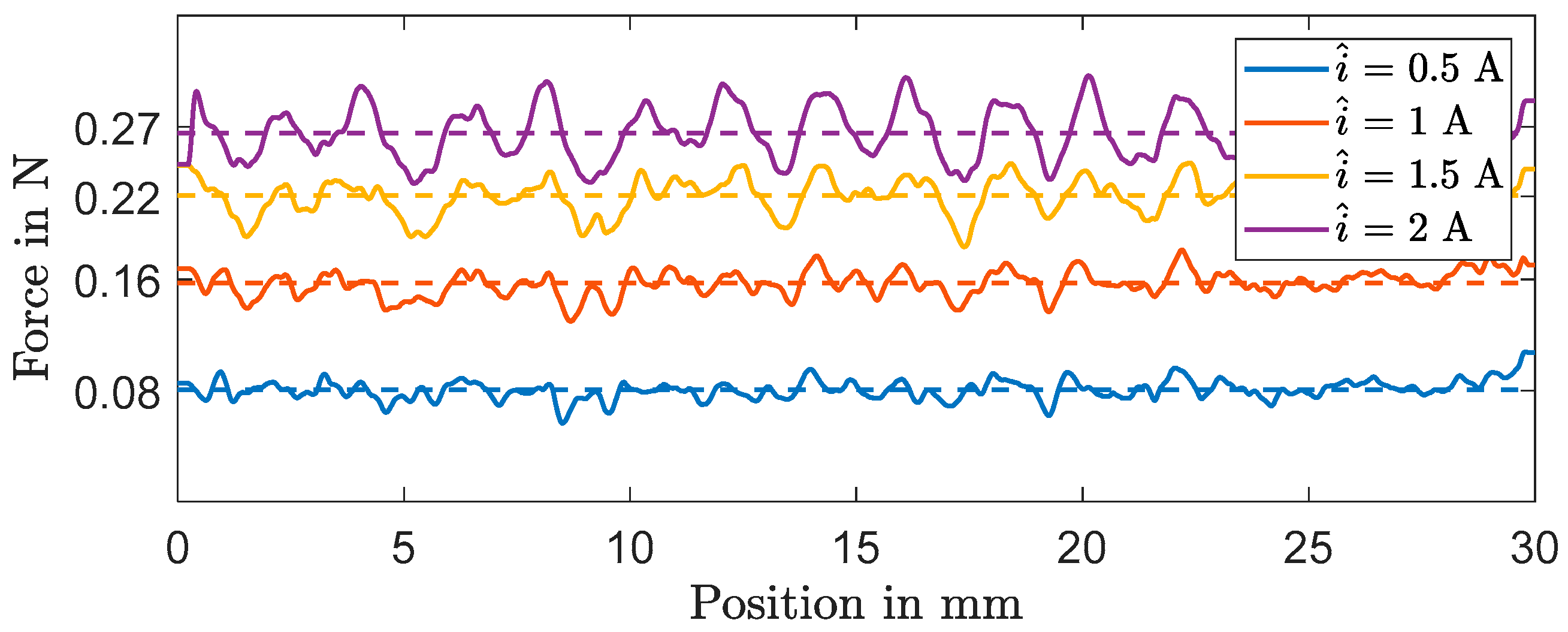
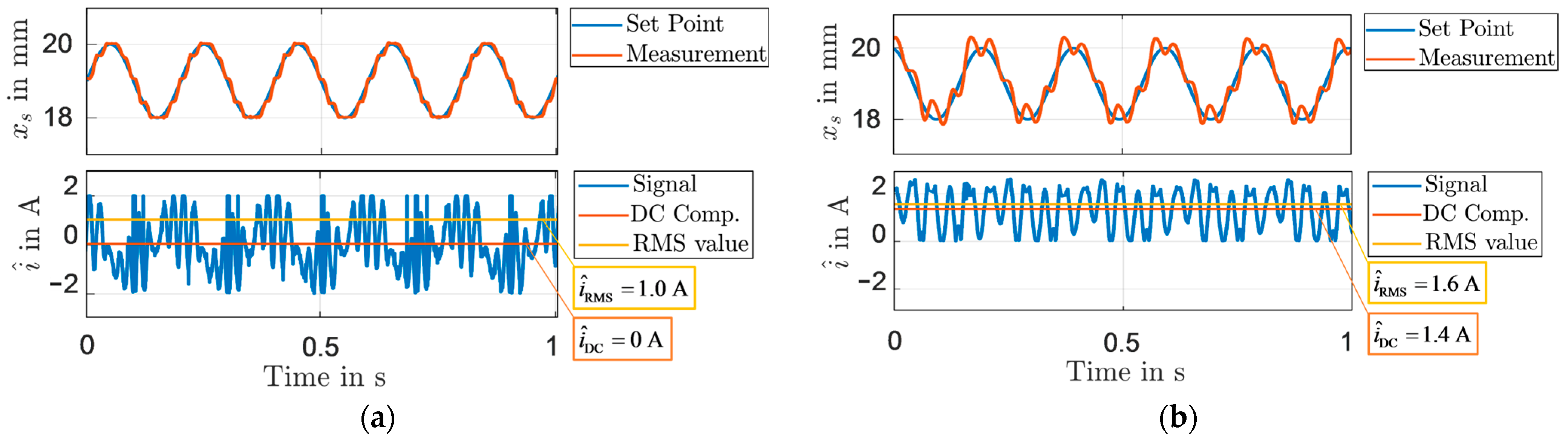
3.3. Experimental Characterization of Weight-Compensated Linear Drive
3.4. Discussion—Weight-Compensated Actuator for Automated EDM Process
4. Summary
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

References
- Huang, T.; Zheng, M.; Zhang, G. A Review of Active Magnetic Bearing Control Technology. In Proceedings of the 31th Chinese Control and Decision Conference (2019 CCDC), Nanchang, China, 3–5 June 2019. [Google Scholar]
- Chheta, Y.R.; Joshi, R.M.; Gotewal, K.K.; ManoahStephen, M. A Review on Passive Gravity Compensation. In Proceedings of the International Conference on Electronics, Communication and Aerospace Technology, Coimbatore, India, 20–22 April 2017. [Google Scholar] [CrossRef]
- Ulrich, N.; Kumar, V. Passive Machanical gravity compensation for Robot Manipulators. In Proceedings of the IEEE Intemational Conference on Robotics and Automation, Sacramento, CA, USA, 9–11 April 1991. [Google Scholar]
- Lu, Q.; Ortega, C.; Ma, O. Passive Gravity Compensation Mechanisms: Technologies and Applications. Recent Pat. Eng. 2011, 5, 32–44. [Google Scholar] [CrossRef]
- Vanderborght, B.; Albu-Schaeffer, A.; Bicchi, A.; Burdet, E.; Caldwell, D.; Carloni, R.; Catalano, M.; Eiberger, O.; Friedl, W.; Ganesh, G.; et al. Variable impedance actuators: A review. Robot. Auton. Syst. 2013, 61, 1601–1614. [Google Scholar] [CrossRef]
- Wang, P.; Xu, Q. Design and modeling of constant-force mechanisms: A survey. Mech. Mach. Theory 2018, 119, 1–21. [Google Scholar] [CrossRef]
- Tolman, K.A.; Merriam, E.G.; Howell, L.L. Compliant constant-force linear-motion mechanism. Mech. Mach. Theory 2016, 106, 68–79. [Google Scholar] [CrossRef]
- Robertson, W.S.; Kidner, M.R.F.; Cazzolato, B.S.; Zander, A.C. Theoretical design parameters for a quasi-zero stiffness magnetic spring for vibration isolation. J. Sound Vib. 2009, 326, 88–103. [Google Scholar] [CrossRef]
- Xu, X.; Zhu, S. A Magnetic Force Spring and its Application in Driver’s Seat Suspension. In Proceedings of the 2010 International Conference on Mechanic Automation and Control Engineering, Wuhan, China, 26–28 June 2010. [Google Scholar]
- Robertson, W.; Cazzolato, B.; Zander, A. A Multipole Array Magnetic Spring. In IEEE Transactions on Magnetics; IEEE: Piscataway, NJ, USA, 2005; Volume 41. [Google Scholar] [CrossRef]
- Choi, J.; Park, S.; Lee, W.; Kang, S.C. Design of a Robot Joint with Variable Stiffness. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008. [Google Scholar]
- Qian, K.X.; Zeng, P.; Ru, W.M.; Yuan, H.Y. Novel Magnetic Spring and Magnetic Bearing. In IEEE Transactions on Magnetics; IEEE: Piscataway, NJ, USA, 2003; Volume 39. [Google Scholar] [CrossRef]
- Tsivilitsin, V.; Milman, Y.; Goncharuk, V.; Bondar, I. Calculation and experimental study of the retractance force for magnetic springs of two types. arXiv 2014, arXiv:1410.8130v1. [Google Scholar]
- Westhoff, B.S.; Maas, J. Miniaturized electric linear drive with permanent magnetic weight compensation. In Proceedings of the International Conference and Exhibition on New Actuator Systems and Applications, Online, 17–19 February 2021. [Google Scholar]
- Westhoff, B.S.; Maas, J. Modeling and Control of Miniaturized Electric Linear Drive with Two-phase Current Excitation. In Proceedings of the 2021 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Delft, The Netherlands, 12–16 July 2021; pp. 332–337. [Google Scholar] [CrossRef]
- Kunieda, M.; Lauwers, B.; Rajurkar, K.P.; Schumacher, B.M. Advancing EDM through Fundamental Insight into the Process. CIRP Ann. 2014, 54, 64–87. [Google Scholar] [CrossRef]
- Tsai, H.; Yan, B.; Huang, F. EDM performance of Cr/Cubased composite electrodes. Int. J. Mach. Tools Manuf. 2003, 43, 245–252. [Google Scholar] [CrossRef]
- Uhlmann, E.; Polte, M.; Yabroudi, S. Novel Advances in Machine Tools, Tool Electrodes and Processes for High-Performance and High-Precision EDM. Procedia CIRP 2022, 113, 611–635. [Google Scholar] [CrossRef]
- Uhlmann, E.; Thißen, K.; Schulte Westhoff, B.; Streckenbach, J.; Ludwig, J.; Maas, J. Process behaviour of segmented and actuated tool electrodes for variable shaping in sinking EDM. Eur. Soc. Precis. Eng. Nanotechnol. 2022, 22, 257–260. [Google Scholar]
- Zangwill, A. Dielectric Matter. In Modern Electrodynamics; Cambridge University Press: Cambridge, UK, 2013; pp. 162–164. [Google Scholar]
- Zangwill, A. Magnetic Matter. In Modern Electrodynamics; Cambridge University Press: Cambridge, UK, 2013; p. 433. [Google Scholar]
- Feynman, R.P. The Laws of Induction. In The Feynman Lectures on Physics; California Institute of Technology: Pasadena, CA, USA, 1963; Volume II, p. 329. [Google Scholar]
- Zangwill, A. Magnetic Forces and Energy. In Modern Electrodynamics; Cambridge University Press: Cambridge, UK, 2013; p. 396. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schulte Westhoff, B.; Maas, J. Design of an Electromagnetic Linear Drive with Permanent Magnetic Weight Compensation. Actuators 2024, 13, 107. https://doi.org/10.3390/act13030107
Schulte Westhoff B, Maas J. Design of an Electromagnetic Linear Drive with Permanent Magnetic Weight Compensation. Actuators. 2024; 13(3):107. https://doi.org/10.3390/act13030107
Chicago/Turabian StyleSchulte Westhoff, Bela, and Jürgen Maas. 2024. "Design of an Electromagnetic Linear Drive with Permanent Magnetic Weight Compensation" Actuators 13, no. 3: 107. https://doi.org/10.3390/act13030107
APA StyleSchulte Westhoff, B., & Maas, J. (2024). Design of an Electromagnetic Linear Drive with Permanent Magnetic Weight Compensation. Actuators, 13(3), 107. https://doi.org/10.3390/act13030107