
Interval Type-2 Fuzzy-Model-Based Sampled-Data Control of an AUV Depth System with Input Saturation



Abstract
1. Introduction
- A novel IT-2 fuzzy sampled-data controller for AUV depth systems was introduced, addressing challenges related to input saturation and uncertainty in surge velocity due to physical limitations.
- The employed controller incorporated time-varying gains, ensuring superior exponential stability in AUV depth control.
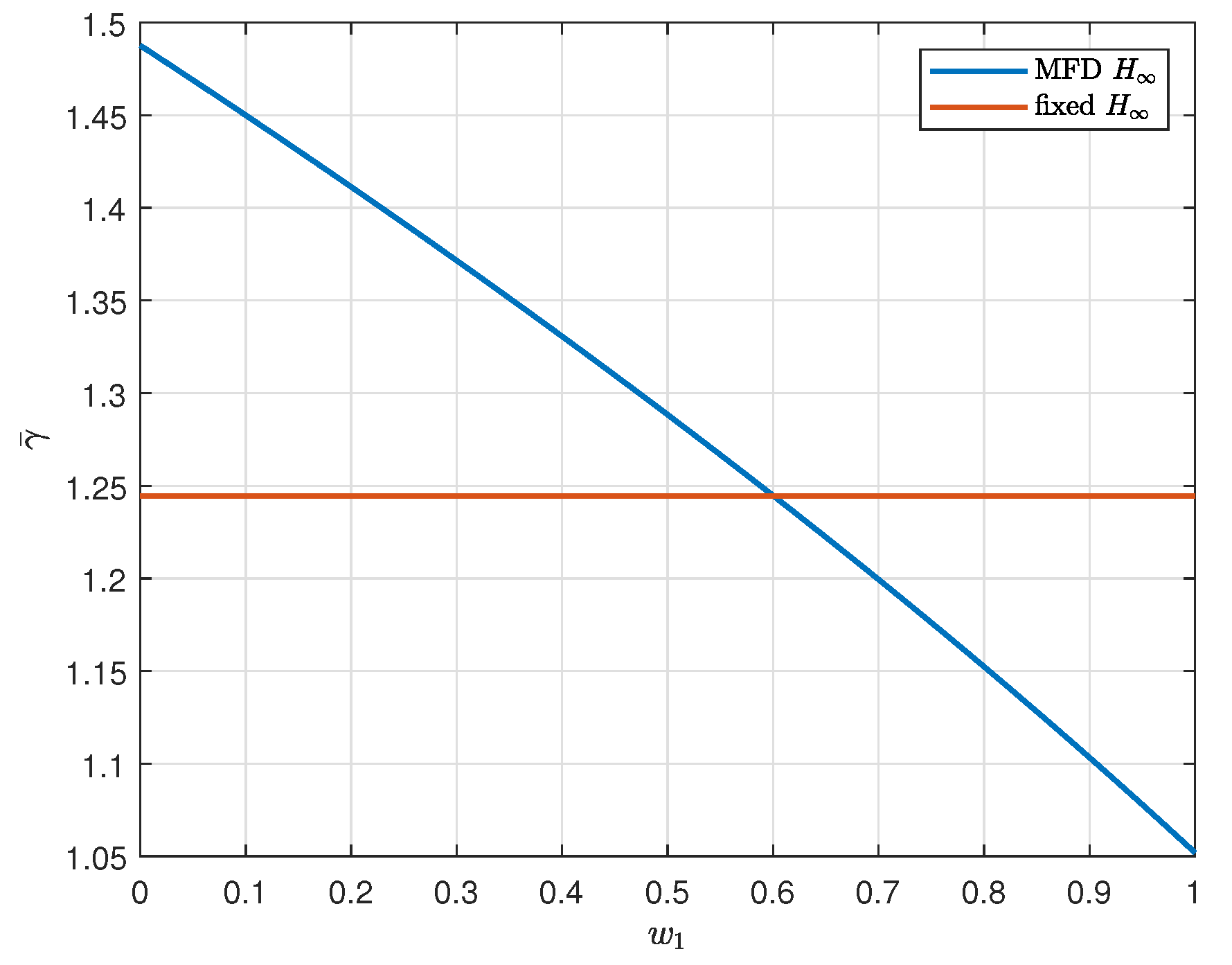
- The designed controller improved overall system robustness by applying the MFD criterion, ensuring robustness for each subsystem.
- The proposed controller design was expressed in the form of LMIs, providing a systematic and practical framework for designing an AUV depth control system.
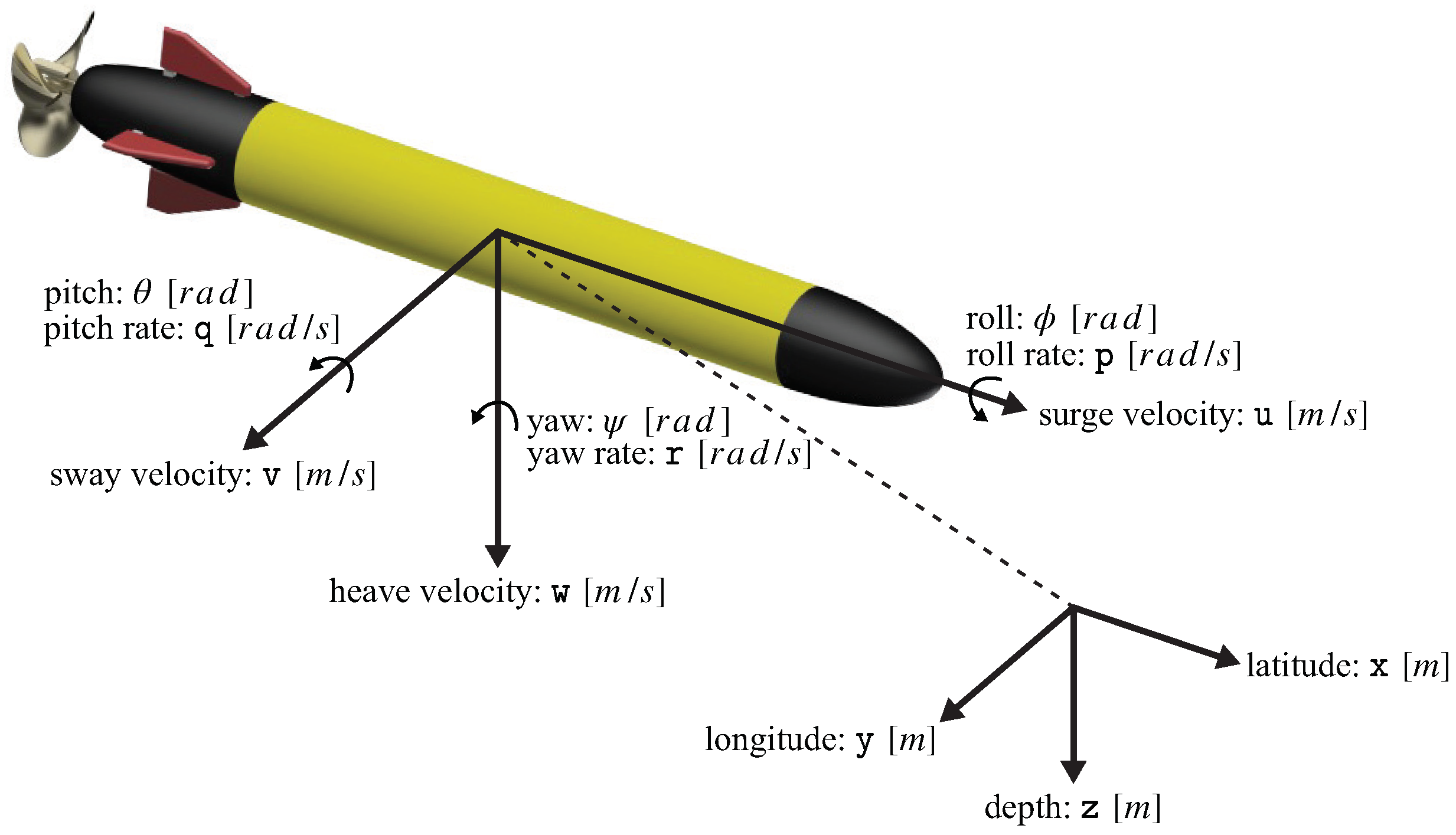
2. Problem Formulation
- (1)
- When , the equilibrium of (4) is exponentially stable with decay rate of .
- (2)
- Under the zero initial condition, the following MFD criterion is satisfiedwhere ; is given terminate time of control.
3. IT-2 Fuzzy Modeling of the AUV Depth System
4. Controller Design
- 1
- In the conventional studies of AUV depth systems, the surge velocity was treated as a constant [39,43,44]. However, in real-world scenarios, varies due to various reasons. To address this fluctuation, this paper proposes an interval type-2 fuzzy model for the AUV’s depth system, considering as an uncertain premise variable. This approach allows the model to effectively represent the fluctuations in using its membership function.
- 2
- Typically, research on AUV depth control assumes operation in the continuous-time domain. However, due to the cost-effectiveness of digital computers, AUV control systems are generally designed as sampled-data systems, where the plant and controller operate in different time domains. Although there are existing studies on sampled-data control for the AUV depth system, they rely on traditional sampled-data control techniques [45,46]. Motivated by this observation, this paper introduces a novel approach to control the AUV depth system by combining a recently developed sampled-data control method with an IT-2 fuzzy model for the AUV depth control system.
- 3
- Previous studies on AUV depth control systems have not extensively addressed real-world challenges like fault estimation, tolerance control, and control input saturation. Control input saturation, in particular, presents a significant limitation for AUV depth control systems. This is due to the physical constraints on the control input, which is typically related to the angle of a fin lift and is limited in its operational range. By addressing the input saturation problem, this paper proposes a more practical controller design strategy for AUV depth control systems than the previous studies.
5. Simulation Validation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jaulin, L. A nonlinear set membership approach for the localization and map building of underwater robots. IEEE Trans. Robot. 2009, 25, 88–98. [Google Scholar] [CrossRef]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV navigation and localization: A review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Allotta, B.; Caiti, A.; Costanzi, R.; Fanelli, F.; Fenucci, D.; Meli, E.; Ridolfi, A. A new AUV navigation system exploiting unscented Kalman filter. Ocean Eng. 2016, 113, 121–132. [Google Scholar] [CrossRef]
- Ma, T.; Li, Y.; Wang, R.; Cong, Z.; Gong, Y. AUV robust bathymetric simultaneous location and mapping. Ocean Eng. 2018, 166, 336–349. [Google Scholar] [CrossRef]
- Kapoutsis, A.C.; Chatzichristofis, S.A.; Doitsidis, L.; de Sousa, J.B.; Braga, J.; Kosmatopoulos, E.B. Real-time adaptive multi-robot exploration with application to underwater map construction. Auton. Robot. 2016, 40, 987–1015. [Google Scholar] [CrossRef]
- Fang, C.; Liu, Y.; Kau, S.; Hong, L.; Lee, C. A new LMI-based approach to relaxed quadratic stabilization of T–S fuzzy control systems. IEEE Trans. Fuzzy Syst. 2006, 14, 386–397. [Google Scholar] [CrossRef]
- Mrazgua, J.; Chaibi, R.; Tissir, E.H.; Ouahi, M. Static output feedback stabilization of T–S fuzzy active suspension system. J. Terramechanics 2021, 97, 19–27. [Google Scholar] [CrossRef]
- Mu, Y.; Zhang, H.; Xi, R.; Gao, Z. State and fault estimations for discrete-time T–S fuzzy systems with sensor and actuator faults. IEEE Trans. Circuits Syst. II Express Brief 2021, 68, 3326–3330. [Google Scholar] [CrossRef]
- Vu, V.; Wang, W. Polynomial controller synthesis for uncertain large-scale polynomial T–S fuzzy systems. IEEE Trans. Cybern. 2021, 51, 1929–1942. [Google Scholar] [CrossRef]
- Yu, C.; Zhang, Q.; Xu, G. Adaptive fuzzy trajectory tracking control of an under-actuated autonomous underwater vehicle subject to actuator saturation. Int. J. Fuzzy Syst. 2018, 20, 269–279. [Google Scholar] [CrossRef]
- Chang, C.; Chang, W. Robust fuzzy control with transient and steady-state performance constraints for ship fin stabilizing sys-tems. Int. J. Fuzzy Syst. 2018, 21, 518–531. [Google Scholar] [CrossRef]
- Li, H.; Wang, J.; Lam, H.K.; Zhou, Q.; Du, H. Adaptive sliding mode control for interval type-2 fuzzy systems. IEEE Trans. Syst. Man, Cybern. Syst. 2016, 46, 1654–1663. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhou, Q.; Wu, C.; Li, H. Dissipativity-based reliable interval type-2 fuzzy filter design for uncertain nonlinear systems. Int. J. Fuzzy Syst. 2018, 20, 390–402. [Google Scholar] [CrossRef]
- Xiao, B.; Lam, K.K.; Song, G.; Li, H. Output-feedback tracking control for interval type-2 polynomial fuzzy-model-based control systems. Neurocomputing 2017, 242, 83–95. [Google Scholar] [CrossRef]
- Song, W.; Tong, S. Fuzzy decentralized output feedback event-triggered control for interval type-2 fuzzy systems with satu-rated inputs. Inf. Sci. 2021, 575, 639–653. [Google Scholar] [CrossRef]
- Rong, N.; Wang, Z. Event-based impulsive control of IT2 T–S fuzzy interconnected system under deception attacks. IEEE Trans. Fuzzy Syst. 2021, 29, 1615–1628. [Google Scholar] [CrossRef]
- Zeng, H.B.; Teo, K.L.; He, Y.; Wang, W. Sampled-data stabilization of chaotic systems based on a T–S fuzzy model. Inf. Sci. 2019, 483, 262–272. [Google Scholar] [CrossRef]
- Hua, C.; Wu, S.; Guan, X. Stabilization of T–S fuzzy system with time delay under sampled-data control using a new looped-functional. IEEE Trans. Fuzzy Syst. 2020, 28, 400–407. [Google Scholar] [CrossRef]
- Cai, X.; Wang, J.; Zhong, S.; Shi, K.; Tang, Y. Fuzzy quantized sampled-data control for extended dissipative analysis of T–S fuzzy system and its ap-plication to WPGSs. J. Frankl. Inst. 2021, 358, 1350–1375. [Google Scholar] [CrossRef]
- Kim, H.S.; Lee, K.; Joo, Y.H. Decentralized sampled-data fuzzy controller design for a VTOL UAV. J. Frankl. Inst. 2021, 358, 1888–1914. [Google Scholar] [CrossRef]
- Zhai, Z.; Yan, H.; Chen, S.; Zhan, X.; Zeng, H. Further results on dissipativity analysis for T–S fuzzy systems based on sampled-data control. IEEE Trans. Fuzzy Syst. 2023, 31, 660–668. [Google Scholar] [CrossRef]
- TLee, H.; Park, J.H. New methods of fuzzy sampled-data control for stabilization of chaotic systems. IEEE Trans. Syst. Man, Cybern. Syst. 2018, 48, 2026–2034. [Google Scholar]
- Ge, C.; Shi, Y.; Park, J.H.; Hua, C. Robust H∞ stabilization for T-S fuzzy systems with time-varying delays and memory sam-pled-data control. Appl. Math. Comput. 2019, 346, 500–512. [Google Scholar]
- Zhang, Y.; He, Y.; Long, F.; Zhang, C. Mixed-delay-based augmented functional for sampled-data synchronization of delayed neural networks with communication delay. IEEE Trans. Neural Netw. Learn. Syst. 2022, 35, 1847–1856. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Xie, K.; He, Y.; She, J.; Wu, M. Matrix-injection-based transformation method for discrete-time systems with time-varying delay. Sci. China Inf. Sci. 2023, 66, 159201. [Google Scholar] [CrossRef]
- Shi, J.; Zhang, Q. Dynamic sliding-mode control for T–S fuzzy singular time-delay systems with H∞ performance. IEEE Access 2019, 7, 115388–115399. [Google Scholar] [CrossRef]
- Xie, W.; Wang, T.; Zhang, J.; Wang, Y. H∞ reduced-order observer-based controller synthesis approach for T–S fuzzy systems. J. Frankl. Inst. 2019, 356, 6388–6400. [Google Scholar] [CrossRef]
- Han, T.J.; Kim, H.S. Disturbance observer-based nonfragile fuzzy tracking control of a spacecraft. Adv. Space Res. 2023, 71, 3600–3612. [Google Scholar] [CrossRef]
- Yan, S.; Gu, Z.; Ding, L.; Park, J.H.; Xie, X. Weighted memory H∞ stabilization of time-varying delayed Takagi–Sugeno fuzzy systems. IEEE Trans. Fuzzy Syst. 2023, 32, 337–342. [Google Scholar] [CrossRef]
- Klug, M.; Catelan, E.B.; Coutinho, D. A T-S fuzzy approach to the local stabilization of nonlinear discrete-time systems subject to ener-gy-bounded disturbances. J. Control Autom. Electr. Syst. 2015, 26, 191–200. [Google Scholar] [CrossRef]
- Elias, L.J.; Faria, F.A.; Araujo, R.; Magossi, R.F.Q.; Oliveira, V.A. Robust static output feedback H∞ control for uncertain Takagi–Sugeno fuzzy systems. IEEE Trans. Fuzzy Syst. 2022, 30, 4434–4446. [Google Scholar] [CrossRef]
- Dong, J.; Hou, Q.; Ren, M. Control synthesis for discrete-time T–S fuzzy systems based on membership function-dependent H∞ performance. IEEE Trans. Fuzzy Syst. 2019, 28, 3360–3366. [Google Scholar] [CrossRef]
- Kuppusamy, S.; Joo, Y.H. Stabilization criteria for T–S fuzzy systems with multiplicative sampled-data control gain uncertainties. IEEE Trans. Fuzzy Syst. 2022, 30, 1082–4092. [Google Scholar] [CrossRef]
- Xie, Z.; Wang, D.; Wong, P.K.; Li, W.; Zhao, J. Dynamic-output-feedback based interval type-2 fuzzy control for nonlinear active suspension systems with actuator saturation and delay. Inf. Sci. 2022, 607, 1174–1194. [Google Scholar] [CrossRef]
- Zare, I.; Setoodeh, P.; Asemani, M.H. Fault-tolerant tracking control of discrete-time T-S fuzzy systems with input constraint. IEEE Trans. Fuzzy Syst. 2022, 30, 1914–1928. [Google Scholar] [CrossRef]
- Wu, C.; Chen, B.; Zhang, W. Multipleobjective H2/H∞ control design of the nonlinear mean-field stochastic jump-diffusion system via fuzzy approach. IEEE Trans. Fuzzy Syst. 2019, 27, 686–700. [Google Scholar] [CrossRef]
- Du, H.; Zhang, N.; Ji, J.C.; Gao, W. Robust fuzzy control of an active magnetic bearing subject to voltage saturation. IEEE Trans. Control. Syst. Technol. 2010, 18, 164–169. [Google Scholar] [CrossRef]
- Arino, C.; Sala, A. Extensions to stability analysis of fuzzy control systems subject to uncertain grades of membership. IEEE Trans. Syst. Man Cybern.-Part B Cybern. 2008, 38, 558–563. [Google Scholar] [CrossRef]
- Prestero, T. Verification of a Six-Degree of Freedom Simulation Model for the REMUS Autonomous Underwater Vehicle. Master’s Thesis, Department of Ocean Engineering and Mechanical Engineering, Massachusetts Institute of Technology, Cambridge, MA, USA, 2001. [Google Scholar]
- Lei, M. Nonlinear diving stability and control for an AUV via singular perturbation. Ocean Eng. 2020, 197, 106824. [Google Scholar] [CrossRef]
- Cao, Y.Y.; Lin, Z. Robust stability analysis and fuzzy scheduling control for nonlinear systems subject to actuator saturation. IEEE Trans. Fuzzy Syst. 2003, 11, 57–67. [Google Scholar]
- Wang, X.; Park, J.H.; Yang, H.; Zhao, G.; Zhong, S. An improved fuzzy sampled-data control to stabilization of T-S fuzzy systems with state delays. IEEE Trans. Cybern. 2020, 50, 3125–3135. [Google Scholar] [CrossRef]
- Li, J.; Lee, P. Design of an adaptive nonlinear controller for depth control of an autonomous underwater vehicle. Ocean Eng. 2005, 32, 2165–2181. [Google Scholar] [CrossRef]
- Shen, Y.; Shao, K.; Ren, W.; Li, Y. Diving control of autonomous underwater vehicle based on improved active disturbance rejection control approach. Neurocomputing 2016, 173, 1377–1385. [Google Scholar] [CrossRef]
- Kim, D.W.; Lee, H.J.; Kim, M.H.; Lee, S.; Kim, T. Robust sampled-data fuzzy control of nonlinear systems with parametric uncertainties: Its application to depth control of autonomous underwater vehicles. Int. J. Control Autom. Syst. 2012, 10, 1164–1172. [Google Scholar] [CrossRef]
- Ma, C.; Qiao, H.; Kang, E. Mixed H∞ and passive depth control for autonomous underwater vehicles with fuzzy memorized sampled-data controller. Int. J. Fuzzy Syst. 2017, 20, 621–629. [Google Scholar] [CrossRef]
- Liu, Y.; Park, J.H.; Guo, B.; Shu, Y. Further results on stabilization of chaotic systems based on fuzzy memory sampled-data control. IEEE Trans. Fuzzy Syst. 2018, 26, 1040–1045. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
An, J.H.; Kim, H.S. Interval Type-2 Fuzzy-Model-Based Sampled-Data Control of an AUV Depth System with Input Saturation. Actuators 2024, 13, 71. https://doi.org/10.3390/act13020071
An JH, Kim HS. Interval Type-2 Fuzzy-Model-Based Sampled-Data Control of an AUV Depth System with Input Saturation. Actuators. 2024; 13(2):71. https://doi.org/10.3390/act13020071
Chicago/Turabian StyleAn, Ji Ho, and Han Sol Kim. 2024. "Interval Type-2 Fuzzy-Model-Based Sampled-Data Control of an AUV Depth System with Input Saturation" Actuators 13, no. 2: 71. https://doi.org/10.3390/act13020071
APA StyleAn, J. H., & Kim, H. S. (2024). Interval Type-2 Fuzzy-Model-Based Sampled-Data Control of an AUV Depth System with Input Saturation. Actuators, 13(2), 71. https://doi.org/10.3390/act13020071