
Research on the Mechanical Parameter Identification and Controller Performance of Permanent Magnet Motors Based on Sensorless Control

 , ,
, ,
Abstract
1. Introduction
- (1)
- A new Predefined-Time Sliding Mode Controller (NPTSMC) is proposed. Firstly, the basic model of the controller is analyzed by means of multi-parameter definition; then, a new sliding mode surface is designed based on the model and a new sliding mode controller is investigated to improve the control accuracy and convergence speed of the system.
- (2)
- A new Interleaved Parallel Extended Sliding Mode Observer (IPESMO) capable of observing three system variables simultaneously is proposed. Each of the three mechanical parameters is first expanded into a new system state variable, and then a simultaneous estimation of the system state is performed using the expanded observer. During the observer design process, a time-varying feedback gain is incorporated into each of the novel observers, and this design improves the accuracy of the observation error and the speed of convergence. Furthermore, the novel interleaved parallel extended sliding mode observer designed in this paper greatly reduces the complexity of matrix computation and has the property of being a Low Pass Filter (LPF), which enables the system to output smooth estimation results even at high switching gains.
- (3)
- Combining three novel extended sliding mode observers into one interleaved parallel interconnected observer for simultaneous multi-parameter estimation. While effectively reducing the system complexity, this also improves the observation efficiency.
- (4)
- A robust activator is designed to reduce the coupling effect between the parameters to be measured and is combined with the observer as a Robust Activator Interleaved Parallel Extended Sliding Mode Observer (RAIPESMO) with a robust activator. Firstly, the coupled error equations are established and the mathematical model of each to-be-measured value is analyzed based on the to-be-measured parameter model; then, the neglected effects are eliminated from the model; finally, the robust activator is simplified to an observer gain parameter with a decoupling function. This design can improve the problems of reduced observation accuracy and long convergence time caused by parameter coupling effects during the operation of the observer.
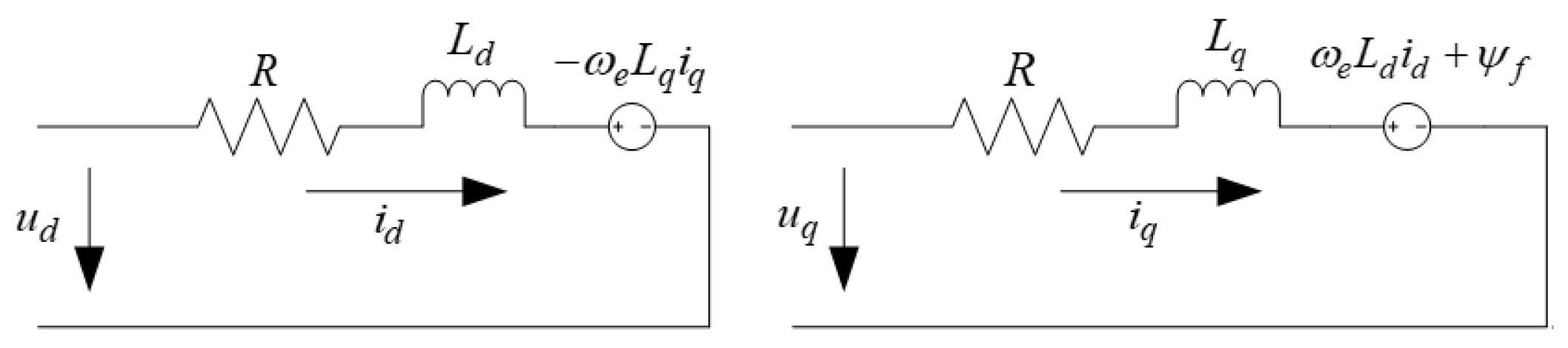
2. Mathematical Models of Surface-Mounted Permanent Magnet Synchronous Motors
3. New Predefined-Time Sliding Mode Control Scheme
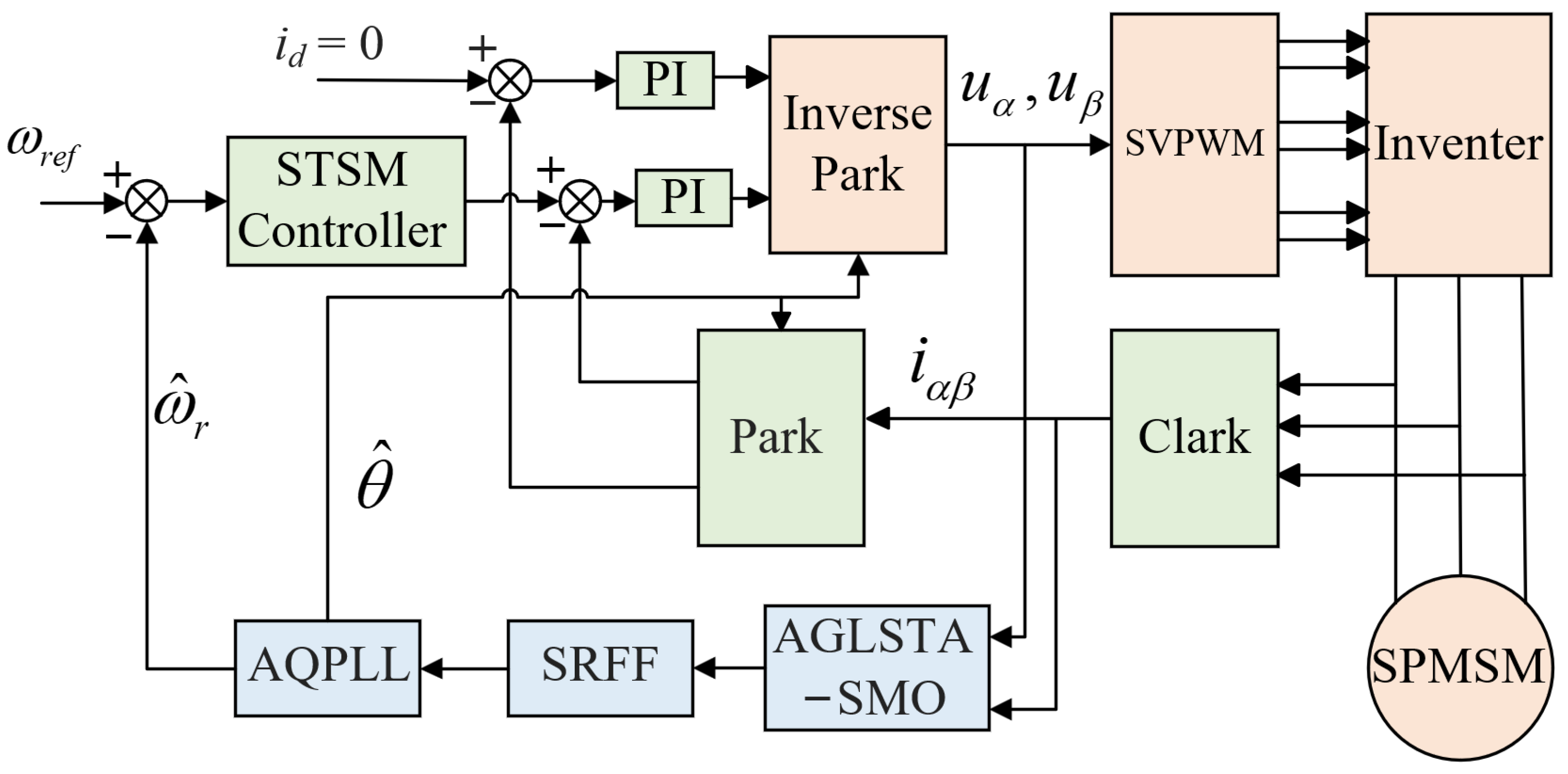
3.1. System Description
3.2. Designing a New Sliding Mode Surface
3.3. New Predefined-Time Sliding Mode Controller
4. Interleaved Parallel Extended Sliding Mode Observer
4.1. Establishment of Mechanical Equations of Motion for Permanent Magnet Synchronous Motors
4.2. Design of a Parallel Doubly Extended Sliding Mode Observer
5. Simulation Analysis and Experimental Verification
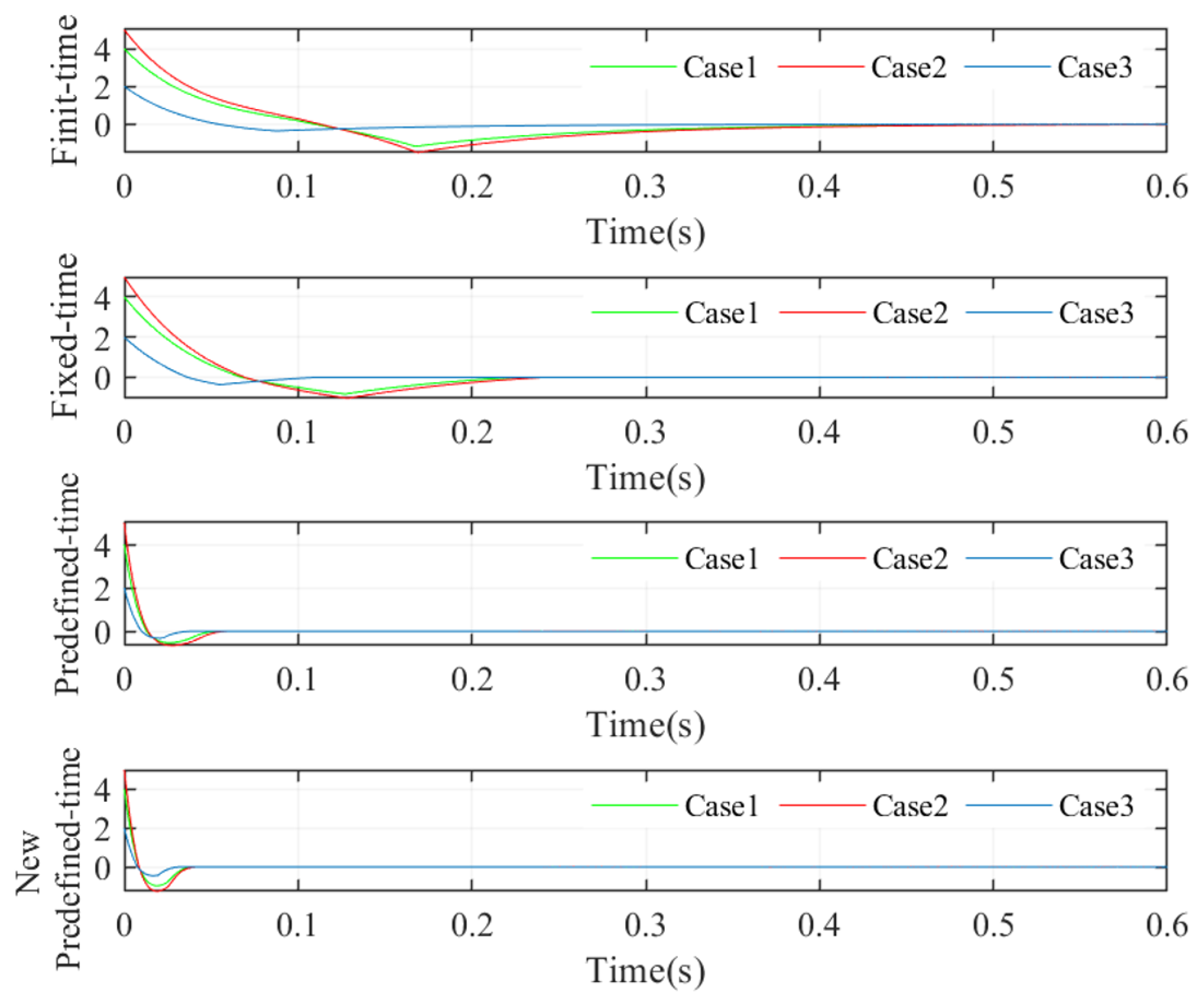
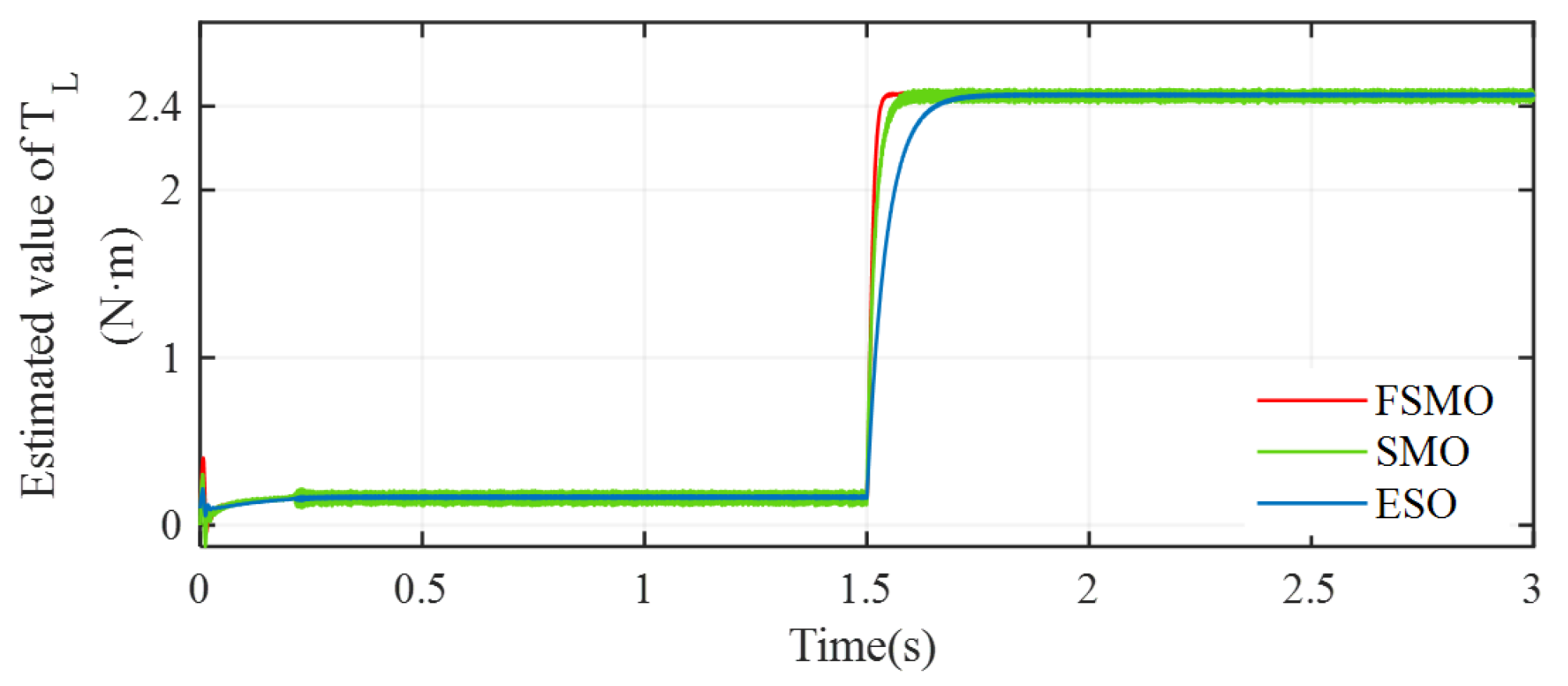
5.1. Simulation Analysis
5.2. Experimental Verification
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| x estimated | x error | ||
| , | d-q axis voltages | , | d-q axis current |
| , | d-q axis inductors | flux linkage | |
| motor speed | pole pairs | ||
| electromagnetic torque | mechanical angular velocity | ||
| moment of inertia | load torque | ||
| friction torque | friction torque gain | ||
| controller gain | observer gain | ||
| model disturbance limit | sliding surface and controller convergence time | ||
| electrical angular speed |
References
- Zuo, Y.; Lai, C.; Iyer, K.L.V. A review of sliding mode observer based sensorless control methods for PMSM drive. IEEE Trans. Power Electron. 2023, 38, 11352–11367. [Google Scholar] [CrossRef]
- Ding, S.; Hou, Q.; Wang, H. Disturbance-observer-based second-order sliding mode controller for speed control of PMSM drives. IEEE Trans. Energy Convers. 2022, 38, 100–110. [Google Scholar] [CrossRef]
- Xiao, F.; Chen, Z.; Chen, Y.; Liu, H. A finite control set model predictive direct speed controller for PMSM application with improved parameter robustness. Int. J. Electr. Power Energy Syst. 2022, 143, 108509. [Google Scholar] [CrossRef]
- Hou, Q.; Ding, S. Finite-time extended state observer-based super-twisting sliding mode controller for PMSM drives with inertia identification. IEEE Trans. Transp. Electrif. 2021, 8, 1918–1929. [Google Scholar] [CrossRef]
- Liu, Y.C.; Laghrouche, S.; Depernet, D.; Djerdir, A.; Cirrincione, M. Disturbance-observer-based complementary sliding-mode speed control for PMSM drives: A super-twisting sliding-mode observer-based approach. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 5416–5428. [Google Scholar] [CrossRef]
- Li, S.; Xu, Y.; Zhang, W.; Zou, J. Robust deadbeat predictive direct speed control for PMSM with dual second-order sliding-mode disturbance observers and sensitivity analysis. IEEE Trans. Power Electron. 2023, 38, 8310–8326. [Google Scholar] [CrossRef]
- Yildiz, R.; Demir, R.; Barut, M. Online estimations for electrical and mechanical parameters of the induction motor by extended Kalman filter. Trans. Inst. Meas. Control 2023, 45, 2725–2738. [Google Scholar] [CrossRef]
- Miloud, I.; Cauet, S.; Etien, E.; Salameh, J.P.; Ungerer, A. Real-Time Speed Estimation for an Induction Motor: An Automated Tuning of an Extended Kalman Filter Using Voltage–Current Sensors. Sensors 2024, 24, 1744. [Google Scholar] [CrossRef] [PubMed]
- İnan, R.; Aksoy, B.; Salman, O.K.M. Estimation performance of the novel hybrid estimator based on machine learning and extended Kalman filter proposed for speed-sensorless direct torque control of brushless direct current motor. Eng. Appl. Artif. Intell. 2023, 126, 107083. [Google Scholar] [CrossRef]
- Yang, C.; Song, B.; Xie, Y.; Zheng, S.; Tang, X. Adaptive identification of nonlinear friction and load torque for PMSM drives via a parallel-observer-based network with model compensation. IEEE Trans. Power Electron. 2023, 38, 5875–5897. [Google Scholar] [CrossRef]
- Liu, Y.C.; Laghrouche, S.; Depernet, D.; N’Diaye, A.; Djerdir, A.; Cirrincione, M. Super-twisting sliding-mode observer-based model reference adaptive speed control for PMSM drives. J. Frankl. Inst. 2023, 360, 985–1004. [Google Scholar] [CrossRef]
- Zhu, H.; Zhu, J.; Jiang, D.; Mao, B.; Liu, Y. Displacement Self-sensing Control of Outer Rotor Coreless Bearingless Permanent Magnet Synchronous Motor Based on Least Square Support Vector Machine Optimised by IMFO. IEEE Trans. Power Electron. 2024, 40, 716–726. [Google Scholar] [CrossRef]
- Zhu, H.; Shi, Y. Displacement self-sensing control of permanent magnet assisted bearingless synchronous reluctance motor based on least square support vector machine optimized by improved NSGA-II. IEEE Trans. Ind. Electron. 2023, 71, 1201–1211. [Google Scholar] [CrossRef]
- Nachtsheim, M.; Ernst, J.; Endisch, C.; Kennel, R. Performance of Recursive Least Squares Algorithm Configurations for Online Parameter Identification of Induction Machines in an Automotive Environment. IEEE Trans. Transp. Electrif. 2023, 9, 4236–4254. [Google Scholar] [CrossRef]
- Yang, C.; Song, B.; Xie, Y.; Lu, S.; Tang, X. Speed-controller-independent mechanical parameter identification in SPMSM drive achieved via signal injection. IEEE Trans. Ind. Electron. 2022, 70, 1282–1297. [Google Scholar] [CrossRef]
- Fazdi, M.F.; Hsueh, P.W. Parameters identification of a permanent magnet dc motor: A review. Electronics 2023, 12, 2559. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, X.; Han, F. High-order terminal sliding-mode observer for parameter estimation of a permanent-magnet synchronous motor. IEEE Trans. Ind. Electron. 2012, 60, 4272–4280. [Google Scholar] [CrossRef]
- Zhang, X.; Li, Z. Sliding-mode observer-based mechanical parameter estimation for permanent magnet synchronous motor. IEEE Trans. Power Electron. 2015, 31, 5732–5745. [Google Scholar] [CrossRef]
- Boileau, T.; Leboeuf, N.; Nahid-Mobarakeh, B.; Meibody-Tabar, F. Online identification of PMSM parameters: Parameter identifiability and estimator comparative study. IEEE Trans. Ind. Appl. 2011, 47, 1944–1957. [Google Scholar] [CrossRef]
- Garrido, R.; Concha, A. Inertia and friction estimation of a velocity-controlled servo using position measurements. IEEE Trans. Ind. Electron. 2013, 61, 4759–4770. [Google Scholar] [CrossRef]
- Lozada-Castillo, N.; Chairez, I.; Luviano-Juarez, A.; Escobar, J. Parameter identification of a permanent magnet synchronous motor. In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1005–1010. [Google Scholar]
- Xu, B.; Zhang, L.; Ji, W. Improved non-singular fast terminal sliding mode control with disturbance observer for PMSM drives. IEEE Trans. Transp. Electrif. 2021, 7, 2753–2762. [Google Scholar] [CrossRef]
- Xu, Y.; Li, S.; Zou, J. Integral sliding mode control based deadbeat predictive current control for PMSM drives with disturbance rejection. IEEE Trans. Power Electron. 2021, 37, 2845–2856. [Google Scholar] [CrossRef]
- Belkhier, Y.; Oubelaid, A. Passivity-based Control of PMSM Servo System with Load Torque Adaptation: Theoretical and Experimental Validation. IEEE Trans. Transp. Electrif. 2024. [Google Scholar] [CrossRef]
- Yi, P.; Wang, X.; Chen, D.; Sun, Z. PMSM current harmonics control technique based on speed adaptive robust control. IEEE Trans. Transp. Electrif. 2021, 8, 1794–1806. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhao, H.; Zhen, S.; He, C. Designing robust control for permanent magnet synchronous motor: Fuzzy based and multivariable optimization approach. IEEE Access 2021, 9, 39138–39153. [Google Scholar] [CrossRef]
- Cao, Z.; Mao, J.; Zhang, C.; Cui, C.; Yang, J. Safety-Critical Generalized Predictive Control for Speed Regulation of PMSM Drives Based on Dynamic Robust Control Barrier Function. IEEE Trans. Ind. Electron. 2024. [Google Scholar] [CrossRef]
- Bouguenna, I.F.; Tahour, A.; Kennel, R.; Abdelrahem, M. Multiple-vector model predictive control with fuzzy logic for PMSM electric drive systems. Energies 2021, 14, 1727. [Google Scholar] [CrossRef]
- Kivanc, O.C.; Ozturk, S.B. Sensorless PMSM drive based on stator feedforward voltage estimation improved with MRAS multiparameter estimation. IEEE/ASME Trans. Mechatronics 2018, 23, 1326–1337. [Google Scholar] [CrossRef]
- Elmas, C.; Ustun, O.; Sayan, H.H. A neuro-fuzzy controller for speed control of a permanent magnet synchronous motor drive. Expert Syst. Appl. 2008, 34, 657–664. [Google Scholar] [CrossRef]
- Nguyen, A.T.; Rafaq, M.S.; Choi, H.H.; Jung, J.W. A model reference adaptive control based speed controller for a surface-mounted permanent magnet synchronous motor drive. IEEE Trans. Ind. Electron. 2018, 65, 9399–9409. [Google Scholar] [CrossRef]
- Hashjin, S.A.; Pang, S.; Miliani, E.H.; Ait-Abderrahim, K.; Nahid-Mobarakeh, B. Data-driven model-free adaptive current control of a wound rotor synchronous machine drive system. IEEE Trans. Transp. Electrif. 2020, 6, 1146–1156. [Google Scholar] [CrossRef]
- Qi, L.; Shi, H. Adaptive position tracking control of permanent magnet synchronous motor based on RBF fast terminal sliding mode control. Neurocomputing 2013, 115, 23–30. [Google Scholar] [CrossRef]
- Zhang, B.; Pi, Y.; Luo, Y. Fractional order sliding-mode control based on parameters auto-tuning for velocity control of permanent magnet synchronous motor. ISA Trans. 2012, 51, 649–656. [Google Scholar] [CrossRef] [PubMed]
- Lu, E.; Li, W.; Wang, S.; Zhang, W.; Luo, C. Disturbance rejection control for PMSM using integral sliding mode based composite nonlinear feedback control with load observer. ISA Trans. 2021, 116, 203–217. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.; Liu, K.; Hua, W.; Hu, M. First-order model based inductance identification with least square method for high-speed sensorless control of permanent magnet synchronous machines. IEEE Trans. Power Electron. 2023, 38, 8719–8729. [Google Scholar] [CrossRef]
- Liu, K.; Zhu, Z. Fast Determination of Moment of Inertia of Permanent Magnet Synchronous Machine Drives for Design of Speed Loop Regulator. IEEE Trans. Control Syst. Technol. 2017, 25, 1816–1824. [Google Scholar] [CrossRef]
- Wang, S.; Wan, S. Full digital deadbeat speed control for permanent magnet synchronous motor with load compensation. IET Power Electron. 2013, 6, 634–641. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Value | Parameters | Value |
|---|---|---|---|
| Rated speed | 3000 RPM | 0.8 | |
| Rated power | 64 W | 0.3 | |
| Rated current | 4 A | 0.1 | |
| Rated toque | 0.2 N·m | −11,347 | |
| Pole pairs | 4 | −37,250 | |
| Stator resistance | −1389 | ||
| Stator inductance | 0.62 ± 20% mH | 0.3 | |
| Flux linkage | 0.00835 Wb | ||
| Rotational inertia | 0.028 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luan, M.; Zhang, Y.; Ruan, J.; Guo, Y.; Wang, L.; Min, H. Research on the Mechanical Parameter Identification and Controller Performance of Permanent Magnet Motors Based on Sensorless Control. Actuators 2024, 13, 525. https://doi.org/10.3390/act13120525
Luan M, Zhang Y, Ruan J, Guo Y, Wang L, Min H. Research on the Mechanical Parameter Identification and Controller Performance of Permanent Magnet Motors Based on Sensorless Control. Actuators. 2024; 13(12):525. https://doi.org/10.3390/act13120525
Chicago/Turabian StyleLuan, Mingchen, Yun Zhang, Jiuhong Ruan, Yongwu Guo, Long Wang, and Huihui Min. 2024. "Research on the Mechanical Parameter Identification and Controller Performance of Permanent Magnet Motors Based on Sensorless Control" Actuators 13, no. 12: 525. https://doi.org/10.3390/act13120525
APA StyleLuan, M., Zhang, Y., Ruan, J., Guo, Y., Wang, L., & Min, H. (2024). Research on the Mechanical Parameter Identification and Controller Performance of Permanent Magnet Motors Based on Sensorless Control. Actuators, 13(12), 525. https://doi.org/10.3390/act13120525