
A Positioning and Tracking Performance–Enhanced Composite Control Algorithm for the Macro–Micro Precision Stage

Abstract
1. Introduction
- (1)
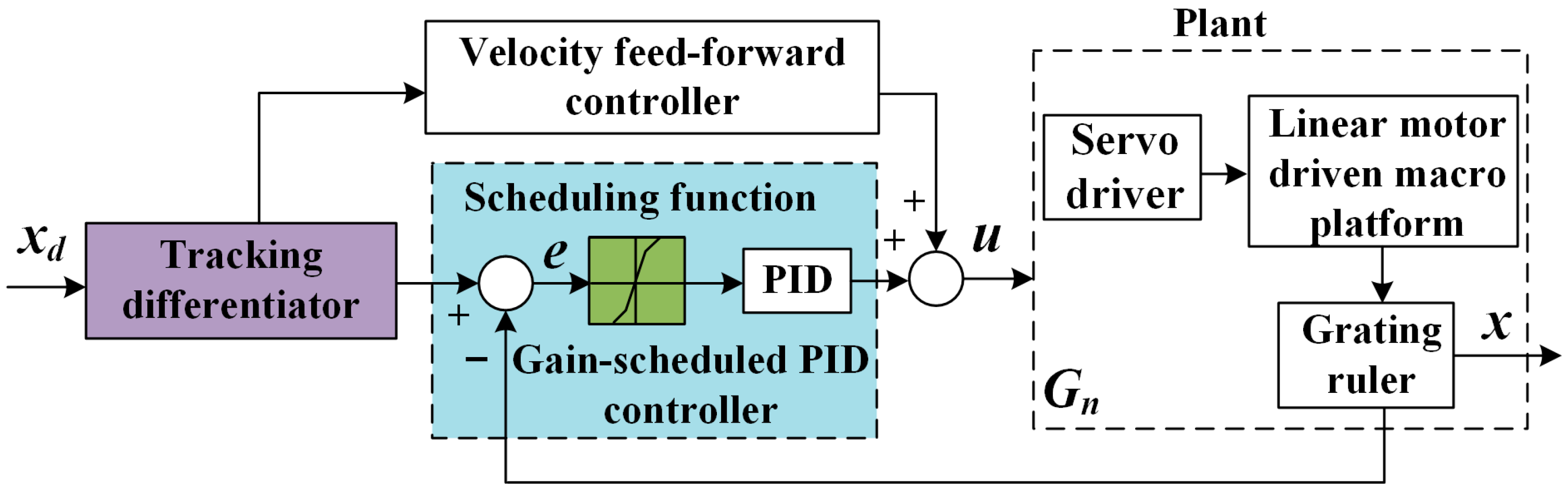
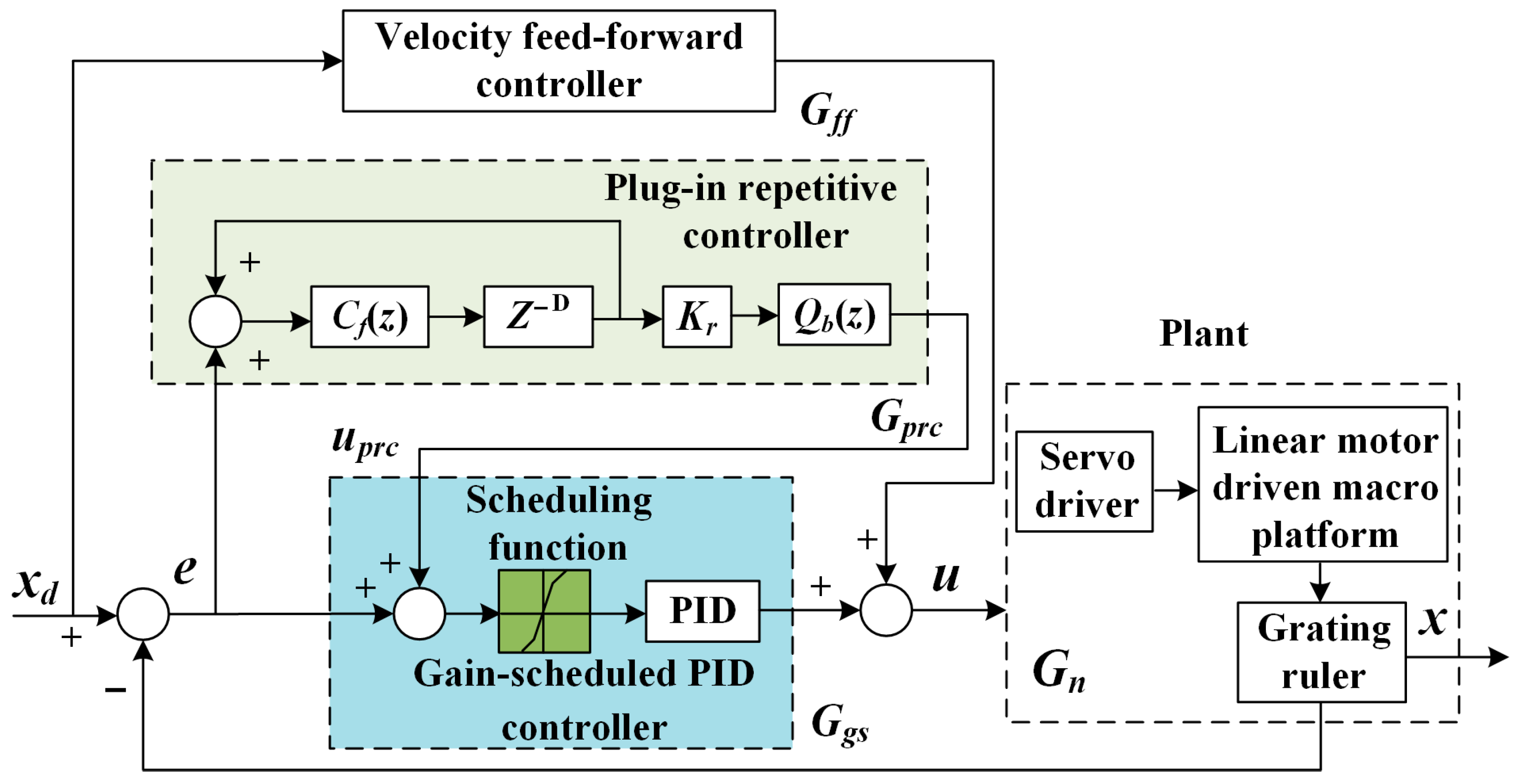
- Proposed a CCA method for the macro stage, including velocity feed-forward, gain-scheduled PID control, and a plug-in repetitive controller.
- (2)
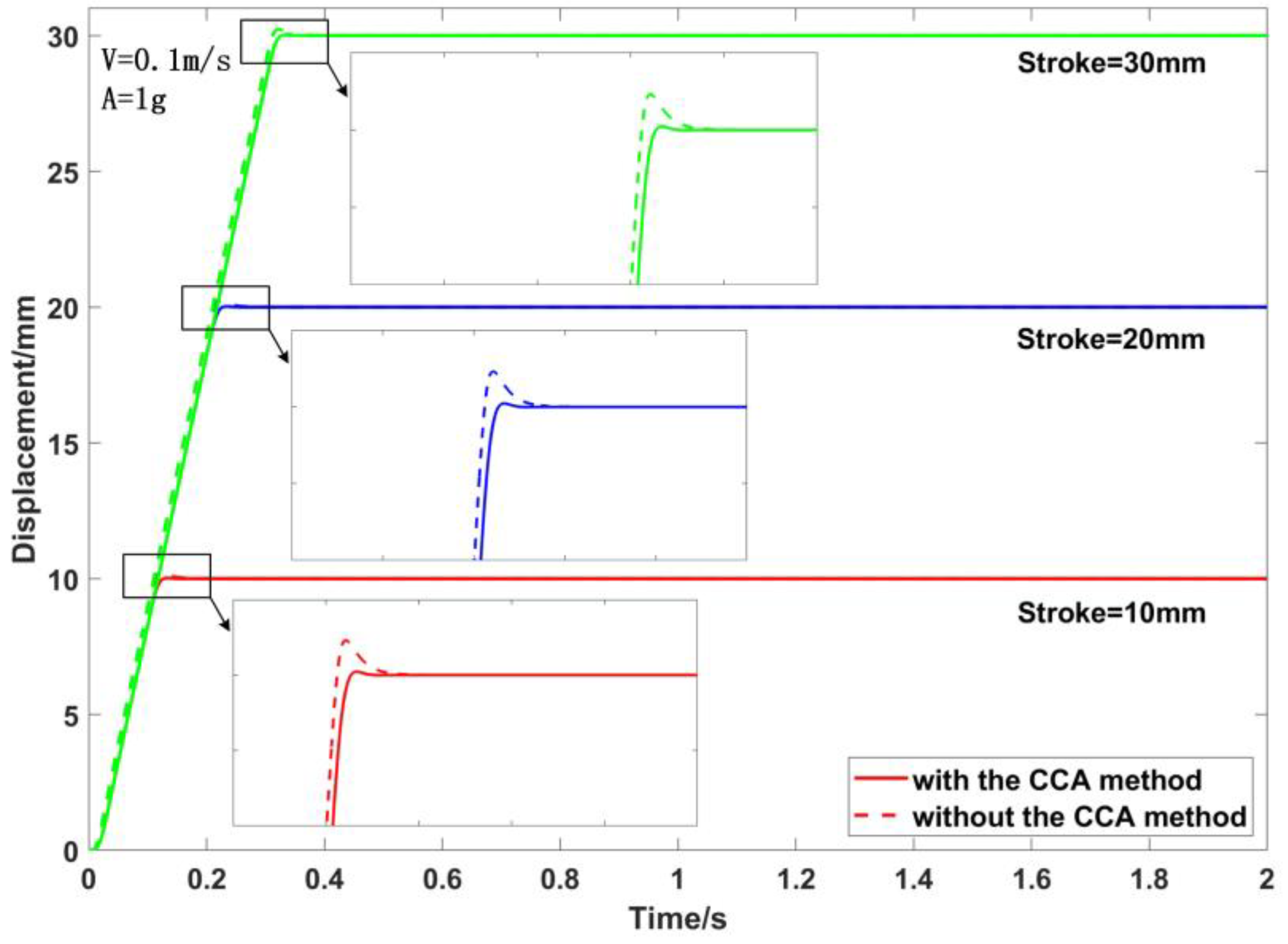
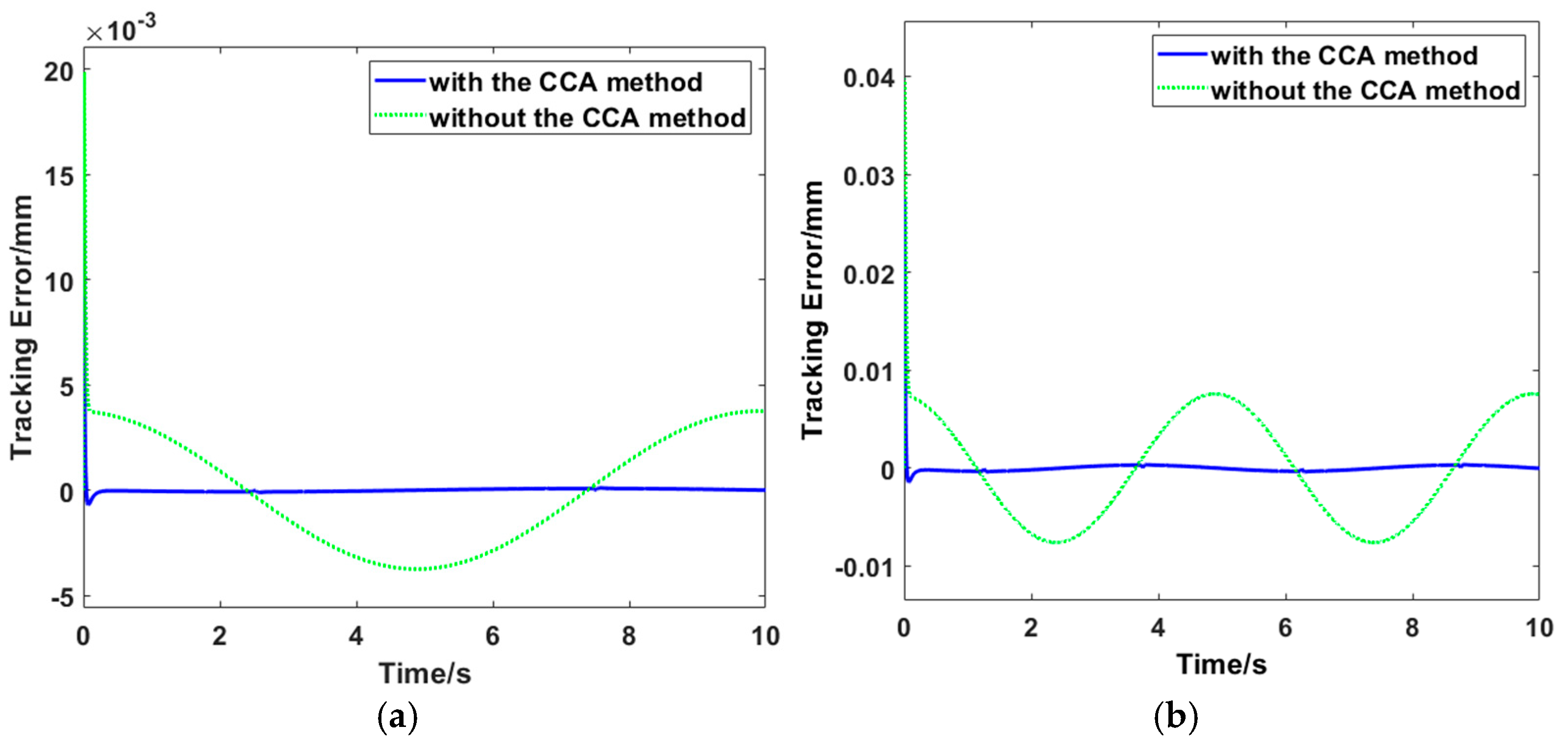
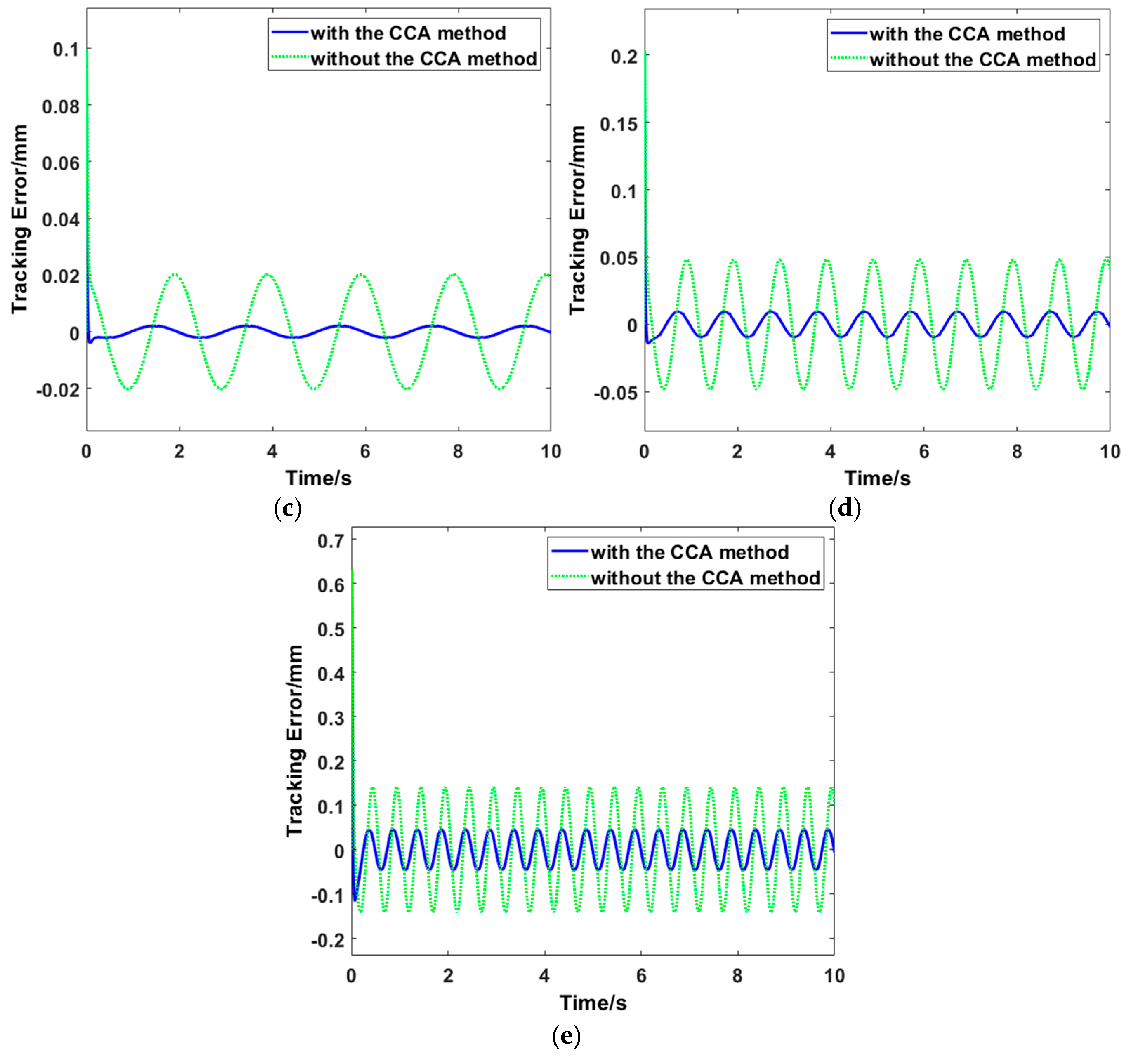
- The proposed controller can reduce the settling time and overshoot of the positioning process, and improve the trajectory tracking accuracy for the macro–micro stage with high positioning accuracy.
2. Modeling of the Macro Stage
2.1. Description of the Macro–Micro Precision Stage Structure
2.2. Dynamic Modeling of the Macro Stage
2.3. Model Order Reduction Analysis
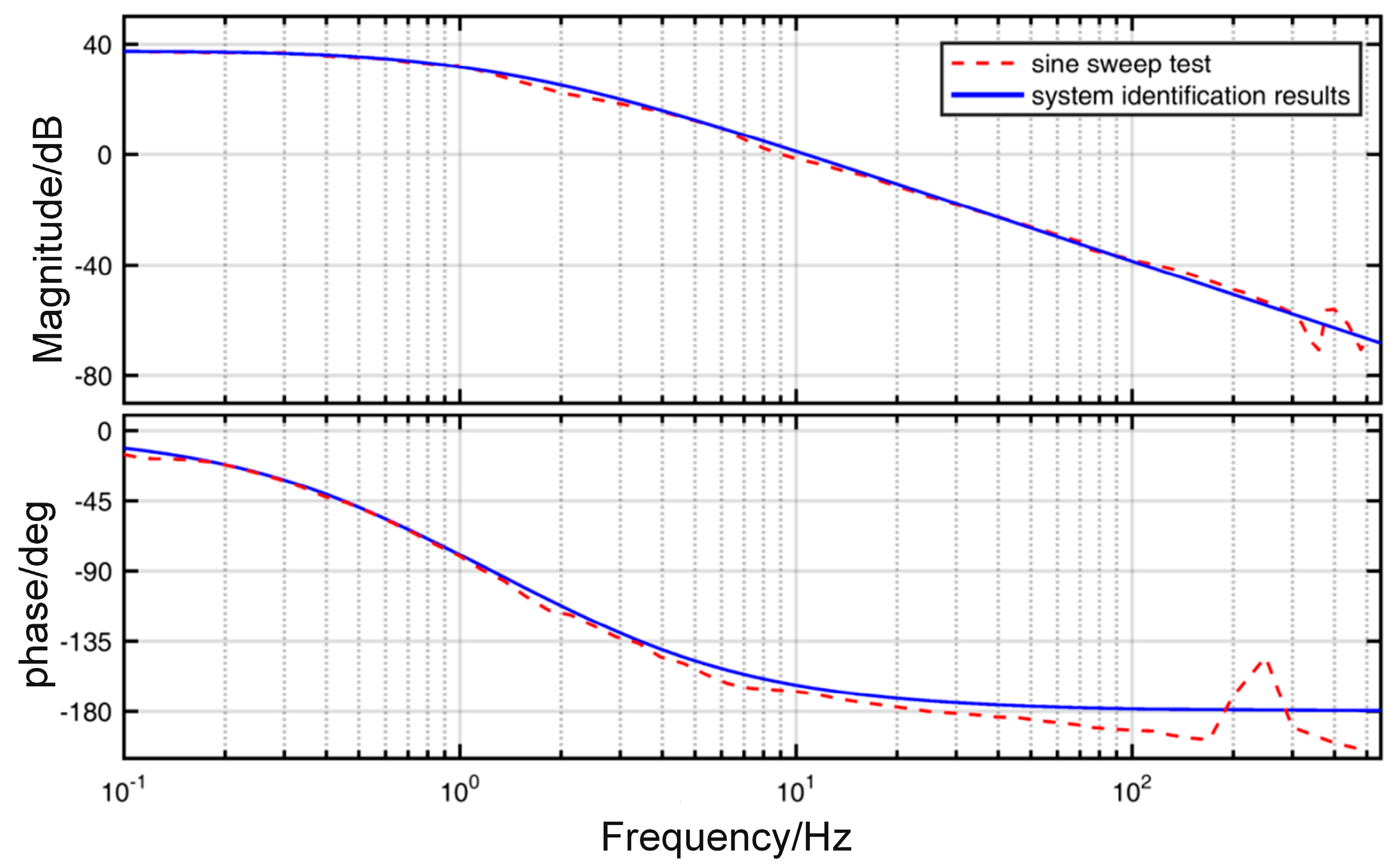
3. Parameter Identification
4. CCA Control Schemes
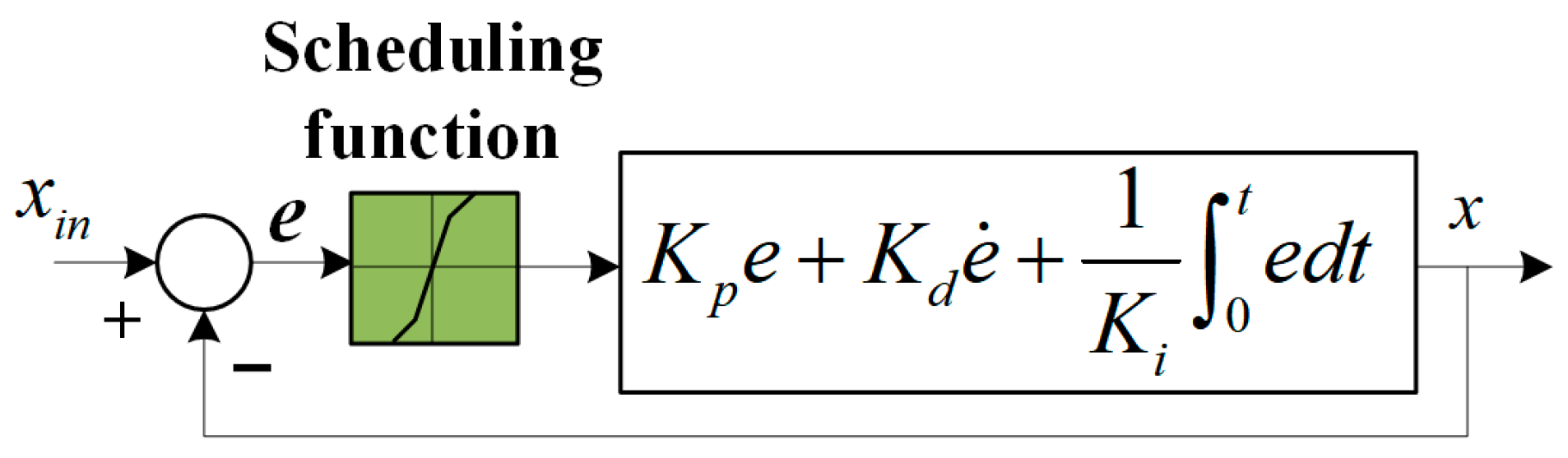
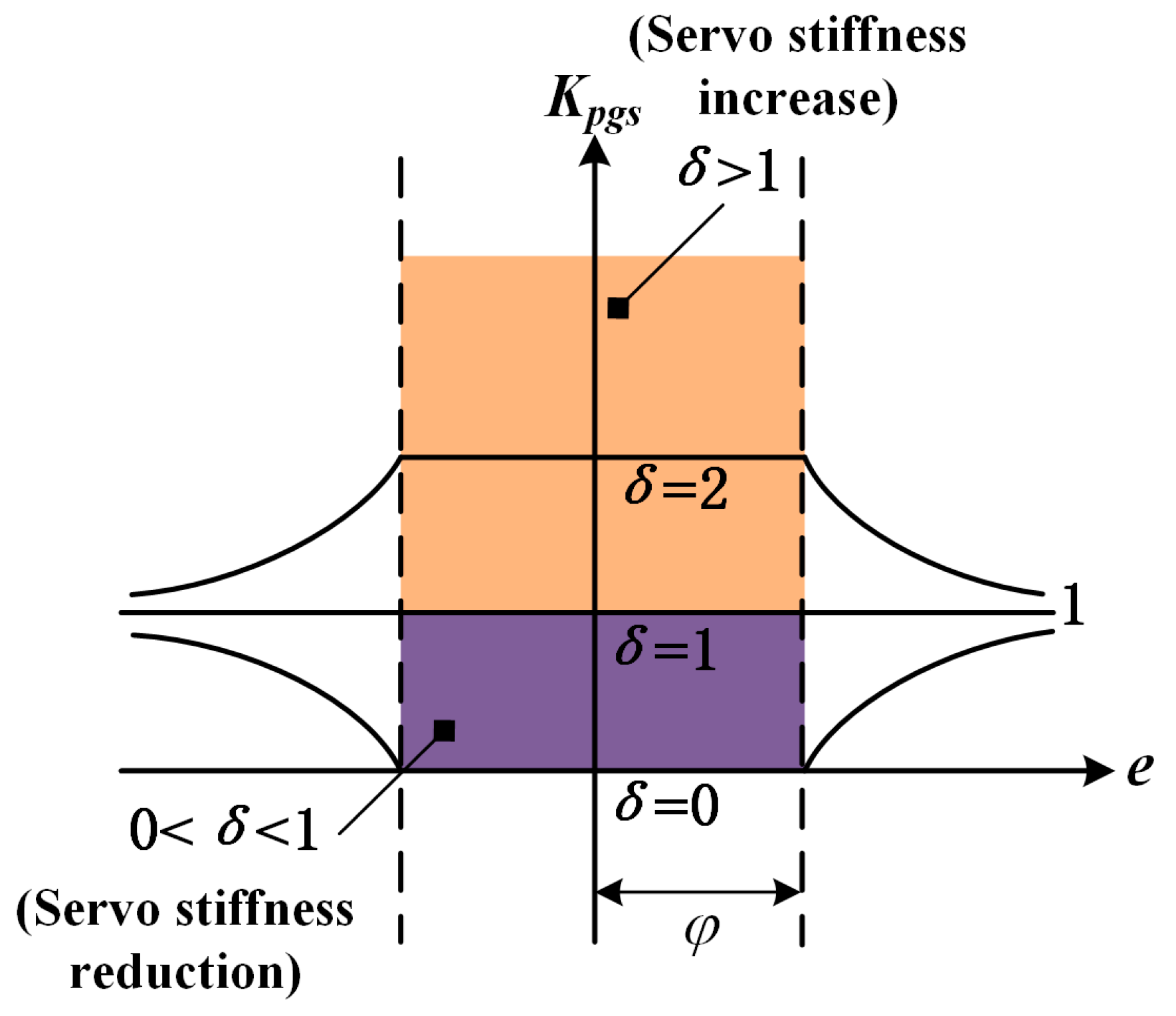
4.1. Tracking Differentiator and Gain-Scheduled PID Control for Positioning
4.2. Plug-In Repetitive Control for Trajectory Tracking
5. Simulation Analysis
5.1. Point Response Simulation
5.2. Sinusoidal Trajectory Tracking Simulation
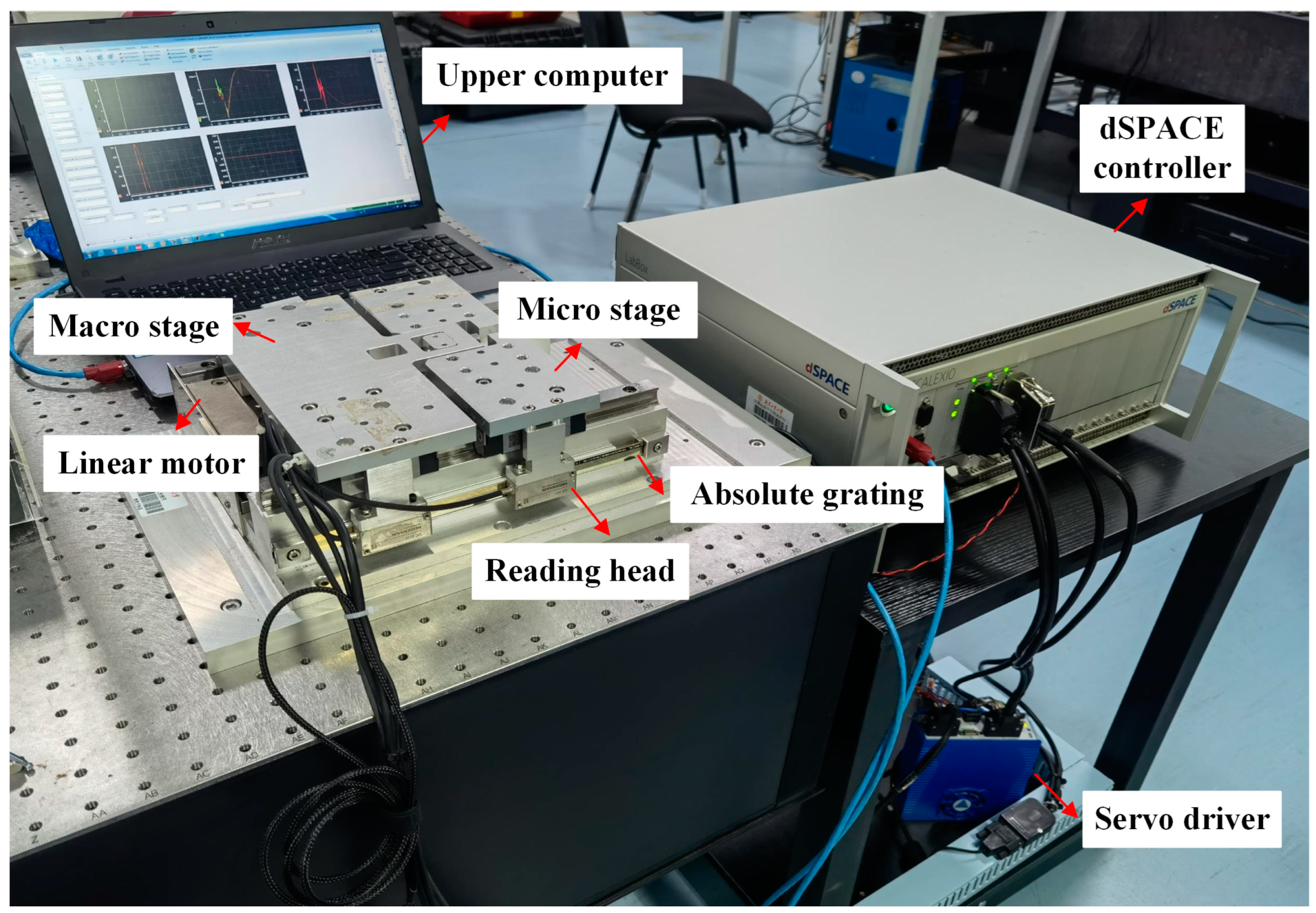
6. Experimental Verification
6.1. Point Response Experiment
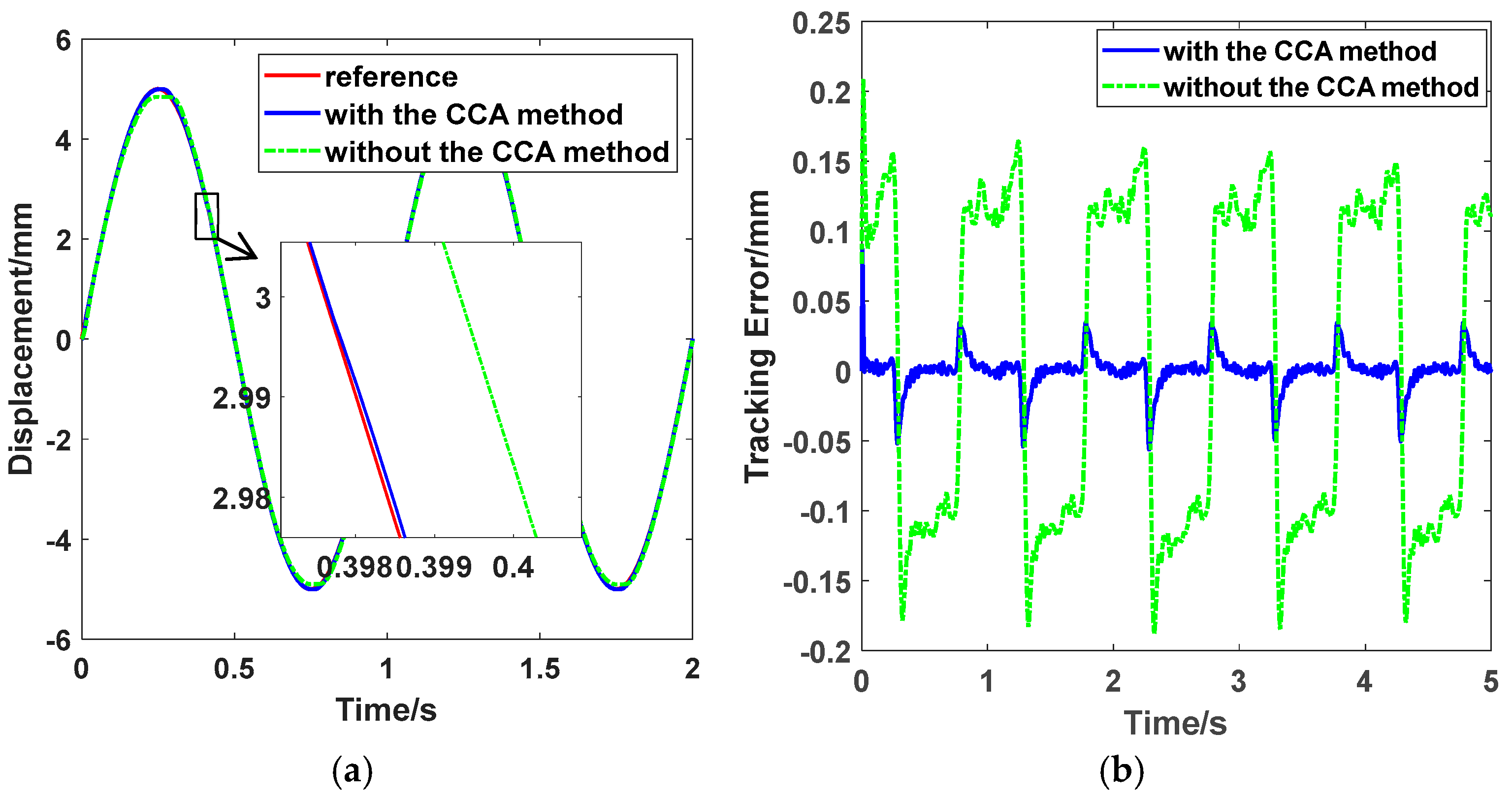
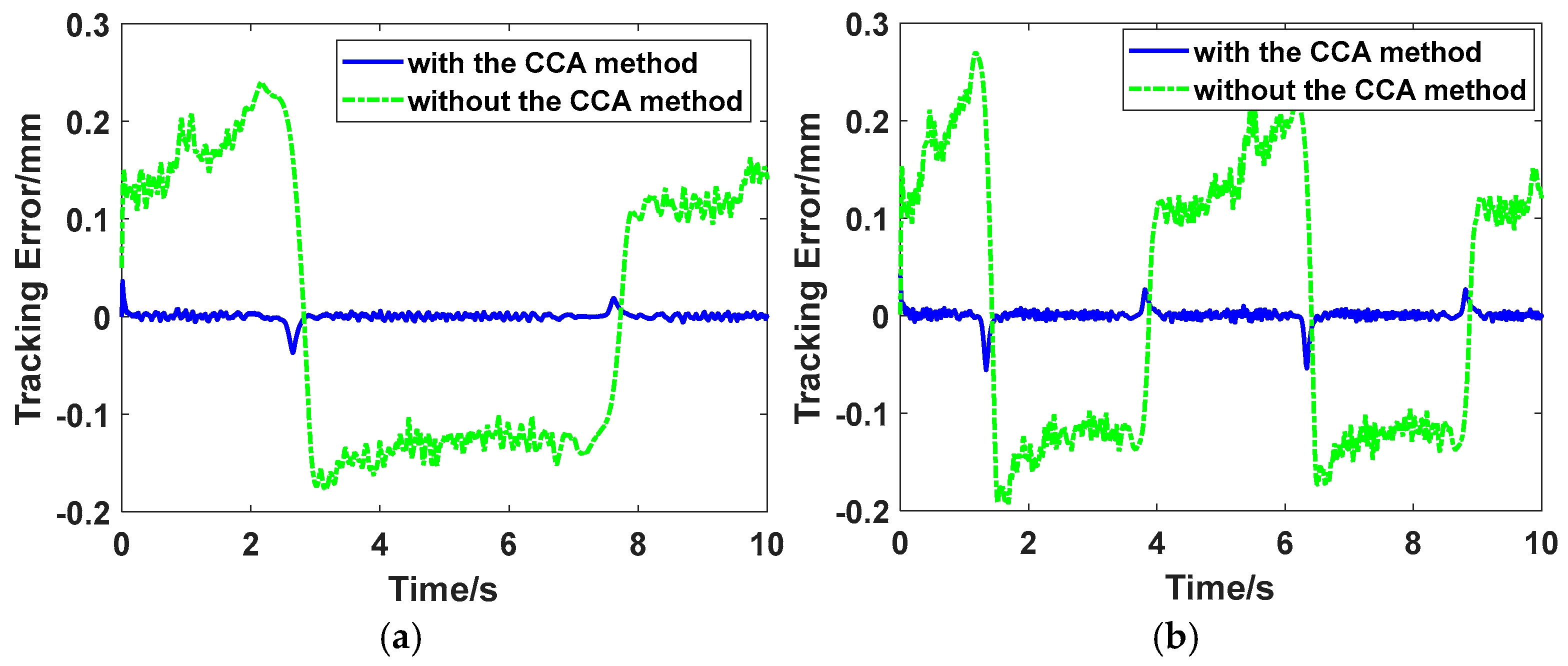
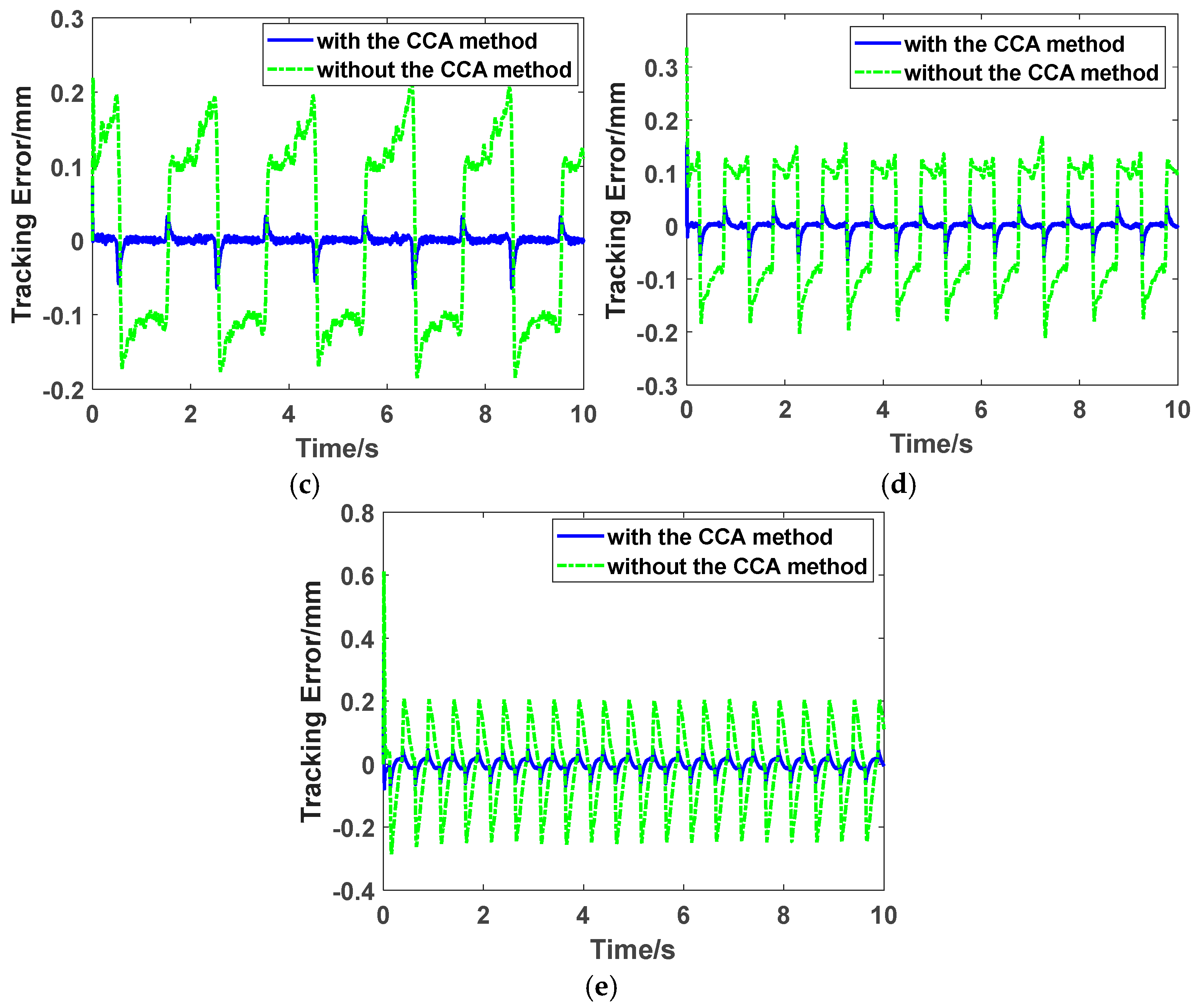
6.2. Sinusoidal Trajectory Tracking Experiment
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Salton, A.T.; Fu, M.Y.; Flores, J.V.; Zheng, J.C. High Precision Over Long Range: A Macro–Micro Approach to Quantized Positioning Systems. IEEE Trans. Contr. Syst. 2021, 29, 2406–2415. [Google Scholar] [CrossRef]
- Zhang, Z.J.; Luo, M.Z.; Duan, J.A.; Kou, B.Q. Design and Analysis of a Novel Frequency Modulation Secondary for High-Speed Permanent Magnet Linear Synchronous Motor. IEEE ASME Trans. Mech. 2022, 27, 790–799. [Google Scholar] [CrossRef]
- Dong, Z.B.; Sun, Z.; Sun, H.; Wang, W.J.; Mei, X.S. A Novel Control Method for Permanent Magnet Synchronous Linear Motor Based on Model Predictive Control and Extended State Observer. Actuators 2024, 13, 34. [Google Scholar] [CrossRef]
- Mehrabi, H.; Hamedi, M.; Aminzahed, I. A novel design and fabrication of a micro-gripper for manipulation of micro-scale parts actuated by a bending piezoelectric. Microsyst. Technol. 2020, 26, 1563–1571. [Google Scholar] [CrossRef]
- Ma, X.F.; Liu, Y.X.; Deng, J.; Gao, X.; Cheng, J.F. A compact inchworm piezoelectric actuator with high speed: Design, modeling, and experimental evaluation. Mech. Syst. Signal Pr. 2023, 184, 109704. [Google Scholar] [CrossRef]
- Chen, X.Y.; Liu, H.W.; Wen, G.H.; Liu, Y.; Cao, J.D.; Qiu, J.L. Adaptive Neural Preassigned-Time Control for Macro–Micro Composite Positioning Stage with Displacement Constraints. IEEE Trans. Ind Inf. 2024, 20, 1103–1112. [Google Scholar] [CrossRef]
- Salton, A.T.; Chen, Z.Y.; Zheng, J.C.; Fu, M.Y. Constrained optimal preview control of dual-stage actuators. IEEE ASME T Mech. 2016, 21, 1179–1184. [Google Scholar] [CrossRef]
- Tian, C.; Yan, P. Data-driven iterative tuning based active disturbance rejection control for piezoelectric nano-positioners. Mechatronics 2020, 65, 102321. [Google Scholar] [CrossRef]
- Xu, Q.S. New Flexure Parallel-Kinematic Micropositioning System With Large Workspace. IEEE Trans. Robot. 2012, 28, 478–491. [Google Scholar] [CrossRef]
- Zhan, B.Y.; Zhang, L.Y.; Liu, Y.C.; Gao, J. Model predictive and compensated ADRC for permanent magnet synchronous linear motors. ISA Trans. 2023, 136, 605–621. [Google Scholar] [CrossRef]
- Yang, X.J.; Liu, H.; Yang, Q.Y.; Zhao, W.H. A novel precision evaluation and analysis method for the direct driven high-speed feed system. Mech Syst Signal Pr. 2019, 121, 689–710. [Google Scholar] [CrossRef]
- Jiao, Z.X.; Cao, Y.; Yan, L.; Li, X.L.; Zhang, L.; Li, Y. Advancing Motivation Feedforward Control of Permanent Magnetic Linear Oscillating Synchronous Motor for High Tracking Precision. Actuators 2021, 10, 128. [Google Scholar] [CrossRef]
- Chen, J.S.; Chen, K.C.; Lai, Z.C.; Huang, Y.K. Friction characterization and compensation of a linear-motor rolling-guide stage. Int. J. Mach. Tool Manuf. 2003, 43, 905–915. [Google Scholar] [CrossRef]
- Wu, J.; Wang, J.S.; Wang, L.P.; Li, T.M. Dynamics and control of a planar 3-DOF parallel manipulator with actuation redundancy. Mech. Mach. Theory. 2009, 44, 835–849. [Google Scholar] [CrossRef]
- Li, Y.B.; Wang, L.; Chen, B.; Wang, Z.S.; Sun, P.; Zheng, H.; Xu, T.T.; Qin, S.Y. Optimization of dynamic load distribution of a serial-parallel hybrid humanoid arm. Mech. Mach. Theory. 2020, 149, 103792. [Google Scholar] [CrossRef]
- Wang, Z.; Hu, C.; Zhu, Y. Accelerated iteration algorithm based contouring error estimation for multiaxis motion control. IEEE-ASME Trans. Mech. 2022, 27, 452–462. [Google Scholar] [CrossRef]
- Shin, H.B.; Park, J.G. Anti-Windup PID Controller with Integral State Predictor for Variable-Speed Motor Drives. IEEE Trans. Ind. Electron. 2012, 59, 1509–1516. [Google Scholar] [CrossRef]
- Wu, J.H.; Xiong, Z.H.; Lee, K.M.; Ding, H. High-Acceleration Precision Point-to-Point Motion Control With Look-Ahead Properties. IEEE Trans. Ind. Electron. 2011, 58, 4343–4352. [Google Scholar]
- Tang, H.; Gao, J.; Chen, X.; Yu, K.M.; To, S.; He, Y.B.; Chen, X.; Zheng, Z.H.; He, S.F.; Chen, C.B.; et al. Development and Repetitive-Compensated PID Control of a Nanopositioning Stage with Large-Stroke and Decoupling Property. IEEE Trans. Ind. Electron. 2018, 65, 3995–4005. [Google Scholar] [CrossRef]
- Zhang, L.Y.; Gao, J.; Chen, X. A rapid dynamic positioning method for settling time reduction through a macro-micro composite stage with high positioning accuracy. IEEE Trans. Ind. Electron. 2018, 65, 4849–4860. [Google Scholar] [CrossRef]
- Song, J.C.; Dong, F.; Zhao, J.W.; Wang, H.; He, Z.Y.; Wang, L.J. An Efficient Multiobjective Design Optimization Method for a PMSLM Based on an Extreme Learning Machine. IEEE Trans. Ind. Electron. 2019, 66, 1001–1011. [Google Scholar] [CrossRef]
- Delibas, B.; Koc, B. A Method to Realize Low Velocity Movability and Eliminate Friction Induced Noise in Piezoelectric Ultrasonic Motors. IEEE ASME Trans. Mech. 2020, 25, 2677–2687. [Google Scholar] [CrossRef]
- Zheng, M.; Zhou, S.Y.; Tomizuka, M. A Design Methodology for Disturbance Observer with Application to Precision Motion Control: An H-infinity Based Approach. In Proceedings of the IEEE 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 3524–3529. [Google Scholar]
- Radac, M.B.; Precup, R.E.; Petriu, E.M. Model-Free Primitive-Based Iterative Learning Control Approach to Trajectory Tracking of MIMO Systems With Experimental Validation. IEEE Trans. Neur. Net. Lear. 2015, 26, 2925–2938. [Google Scholar] [CrossRef] [PubMed]
- Cui, J.; Zhao, F.; Chu, Z. Experiment on trajectory tracking control of high precise positioning system based on iterative learning controller with wavelet filtering. Mechatronics 2015, 32, 88–95. [Google Scholar] [CrossRef]
- Liu, P.B.; Yan, P.; Hitay, O. Design and trajectory tracking control of a piezoelectric nano-manipulator with actuator saturations. Mech. Syst. Signal Pr. 2018, 111, 529–544. [Google Scholar] [CrossRef]
- Yang, M.J.; Gu, G.Y.; Zhu, L.M. High-bandwidth tracking control of piezo-actuated nanopositioning stages using closed-loop input shaper. Mechatronics 2014, 24, 724–733. [Google Scholar] [CrossRef]
- Wang, Y.W.; Zhang, W.A.; Yu, L. GESO-Based Position Synchronization Control of Networked Multi-Axis Motion System. IEEE Trans. Ind. Inf. 2020, 16, 248–257. [Google Scholar] [CrossRef]
- Li, C.X.; Gu, G.Y.; Zhu, L.M.; Su, C.Y. Odd-harmonic repetitive control for high-speed raster scanning of piezo-actuated nanopositioning stages with hysteresis nonlinearity. Sens. Actuat. A Phys. 2016, 244, 95–105. [Google Scholar] [CrossRef]
- Aljanaideh, M.; Rakotondrabe, M.; Aidarabsah, I.; Aljanaideh, O. Internal model-based feedback control design for inversion-free feedforward rate-dependent hysteresis compensation of piezoelectric cantilever actuator. Control Eng. Pract. 2018, 72, 29–41. [Google Scholar] [CrossRef]
- Tian, J.; Yuan, L.; Xiao, W.D.; Ran, T.; Zhang, J.B.; Li, H. Optimal robust control with cooperative game theory for lower limb exoskeleton robot. Nonlinear Dynam. 2022, 108, 1283–1303. [Google Scholar] [CrossRef]
- Wu, Z.G.; Chen, M.; Ping, M.H.; Li, H.; Zhang, Q.; Xiong, X.Z.; Mi, H.Y.; Li, Z.X.; Li, Y.M. Tracking control of PZT-Driven compliant precision positioning micromanipulator. IEEE Access 2020, 8, 126477–126487. [Google Scholar] [CrossRef]
- Lin, C.; Zheng, S.; Li, P.Y.; Jiang, M.D. Kinetostatic analysis of 6-DOF compliant platform with a multi-stage condensed modeling method. Microsyst. Technol. 2021, 27, 2153–2166. [Google Scholar] [CrossRef]
- Kim, K.; Choi, Y.M.; Nam, B.U.; Lee, M.G. Dual Servo Stage Without Mechanical Coupling for Process of Manufacture and Inspection of Flat Panel Displays Via Modular Design Approach. Int. J. Precis. Eng. Man. 2012, 13, 407–412. [Google Scholar] [CrossRef]
- Zhang, J.D.; Gao, J.; Zhang, L.Y.; Luo, Y.H.; Chen, X.; Chen, X.; He, Y.B. Novel Dynamic Microactuation Method for Tracking-Error Reduction of Permanent Magnet Linear Synchronous Motors. IEEE Trans. Ind. Electron. 2022, 69, 9165–9175. [Google Scholar] [CrossRef]
- Feng, C.L.; Chen, W.D.; Shao, M.Q.; Ni, S.H. Trajectory Tracking and Adaptive Fuzzy Vibration Control of Multilink Space Manipulators with Experimental Validation. Actuators 2023, 12, 138. [Google Scholar] [CrossRef]
- Liu, Y.C.; Gao, J.; Zhong, Y.B.; Zhang, L.Y. Extended State Observer-Based IMC-PID Tracking Control of PMLSM Servo Systems. IEEE Access 2020, 9, 49036–49046. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motion Parameters | Overshoot (μm) | Settling Time (ms) | ||||||
|---|---|---|---|---|---|---|---|---|
| Stroke (mm) | Velocity (m/s) | Acceleration (m/s2) | Without CCA | With CCA | Reduction (%) | Without CCA | With CCA | Reduction (%) |
| 10 | 0.1 | 10 | 232.01 | 22.47 | 90.31 | 85.13 | 30.29 | 64.41 |
| 20 | 0.1 | 10 | 232.33 | 22.98 | 90.11 | 85.18 | 30.63 | 64.04 |
| 30 | 0.1 | 10 | 232.33 | 22.99 | 90.10 | 85.23 | 30.66 | 64.02 |
| Sinusoidal Trajectory | Tracking Error (μm) | |||||
|---|---|---|---|---|---|---|
| Amplitude (mm) | Frequency (Hz) | Without the CCA | With the CCA | STD Reduction (%) | ||
| MAE | STD | MAE | STD | |||
| 10 | 0.1 | 2.4 | 2.8 | 0.08 | 0.42 | 85.0 |
| 10 | 0.2 | 4.9 | 5.6 | 0.26 | 0.87 | 84.45 |
| 10 | 0.5 | 13.1 | 14.9 | 1.5 | 2.6 | 82.55 |
| 10 | 1 | 31.1 | 35.2 | 6.3 | 8.3 | 76.42 |
| 10 | 2 | 91.3 | 103.4 | 31.5 | 40.8 | 60.54 |
| Motion Parameters | Overshoot (μm) | Settling Time (ms) | ||||||
|---|---|---|---|---|---|---|---|---|
| Stroke (mm) | Velocity (m/s) | Acceleration (m/s2) | Without CCA | With CCA | Reduction (%) | Without CCA | With CCA | Reduction (%) |
| 10 | 0.1 | 10 | 59.7 | 4.0 | 93.2 | 36.6 | 26.6 | 27.3 |
| 20 | 0.1 | 10 | 82.3 | 15.1 | 81.6 | 39.8 | 31.1 | 21.8 |
| 30 | 0.1 | 10 | 91.1 | 21.5 | 76.4 | 45.1 | 35.8 | 20.6 |
| Sinusoidal Trajectory | Tracking Error (μm) | |||||
|---|---|---|---|---|---|---|
| Amplitude (mm) | Frequency (Hz) | Without the CCA | With the CCA | STD Reduction (%) | ||
| MAE | STD | MAE | STD | |||
| 10 | 0.1 | 138.2 | 142.5 | 2.5 | 4.8 | 96.63 |
| 10 | 0.2 | 136.3 | 141.7 | 3.6 | 7.4 | 94.77 |
| 10 | 0.5 | 120.9 | 124.5 | 5.3 | 10.9 | 91.24 |
| 10 | 1 | 106.9 | 110.3 | 7.3 | 13.8 | 87.48 |
| 10 | 2 | 104 | 129.2 | 16.3 | 22.3 | 82.73 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Z.; Gao, J.; Zhang, L. A Positioning and Tracking Performance–Enhanced Composite Control Algorithm for the Macro–Micro Precision Stage. Actuators 2024, 13, 433. https://doi.org/10.3390/act13110433
Zhou Z, Gao J, Zhang L. A Positioning and Tracking Performance–Enhanced Composite Control Algorithm for the Macro–Micro Precision Stage. Actuators. 2024; 13(11):433. https://doi.org/10.3390/act13110433
Chicago/Turabian StyleZhou, Zhiwei, Jian Gao, and Lanyu Zhang. 2024. "A Positioning and Tracking Performance–Enhanced Composite Control Algorithm for the Macro–Micro Precision Stage" Actuators 13, no. 11: 433. https://doi.org/10.3390/act13110433
APA StyleZhou, Z., Gao, J., & Zhang, L. (2024). A Positioning and Tracking Performance–Enhanced Composite Control Algorithm for the Macro–Micro Precision Stage. Actuators, 13(11), 433. https://doi.org/10.3390/act13110433