
Fixed-Time Stabilization of a Class of Stochastic Nonlinear Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- A new estimation of the settling time is obtained through an ingenious variable transformation and the application of the Gamma function that is more accurate than existing settling time estimations;
- (2)
- Applying adding a power integration approach, a continuous state feedback controller is created for a stochastic system. Utilizing the theory of fixed-time stability, it is shown that the suggested controller ensures that the investigated system is fixed-time stable in probability.
2. Problem and Preliminaries
- (1)
- Finite-time attractiveness in probability: for each initial data , the stochastic settling time is finite almost everywhere, i.e., ;
- (2)
- Stability in probability: for each pair of and , there exists a makes ,.
- (1)
- The equilibrium solution is finite-time stable in probability;
- (2)
- , where and independent of the initial data.
3. Main Results
3.1. A Fixed-Time Stability Theorem
3.2. State-Feedback Controller Design
3.3. Stability Analysis
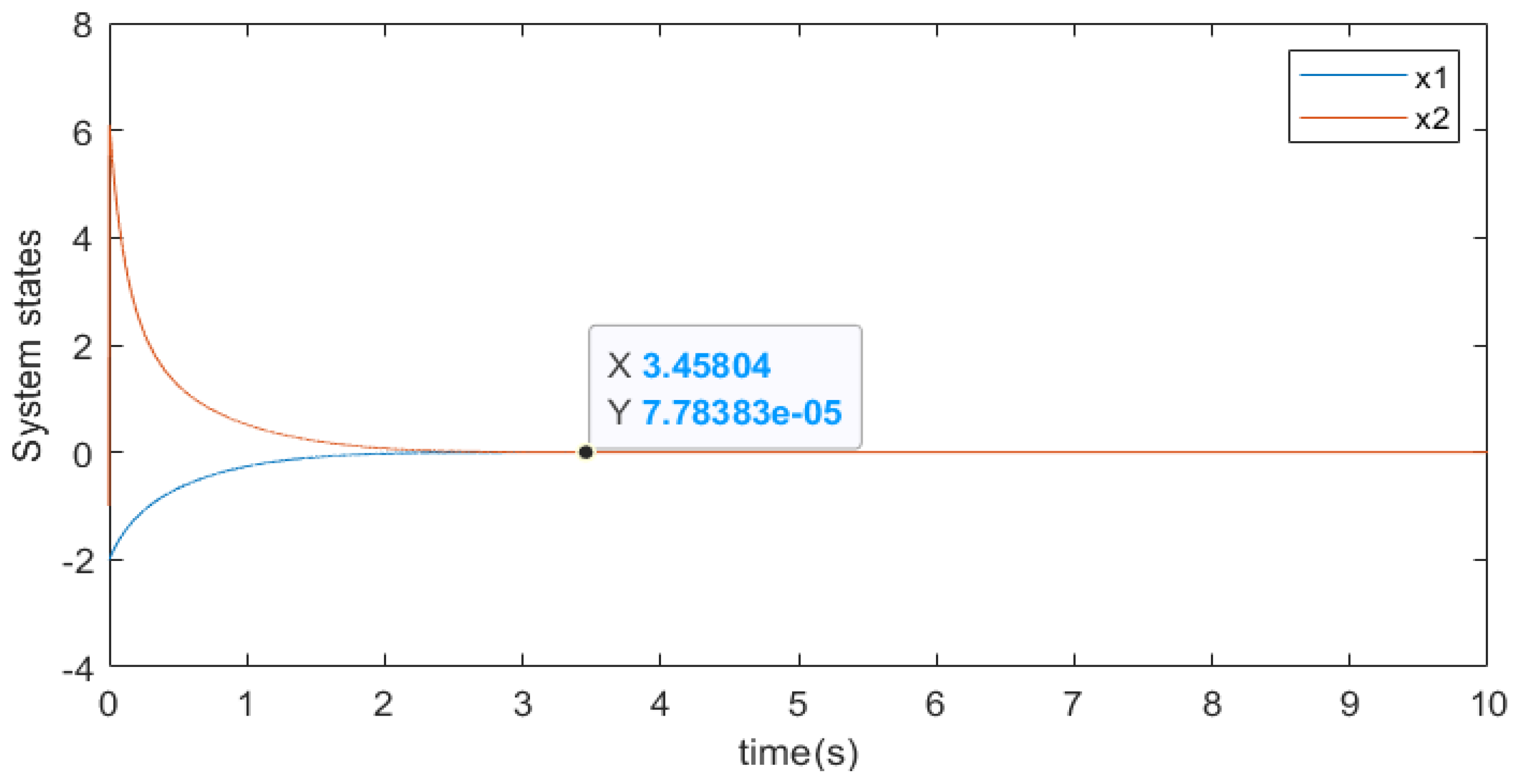
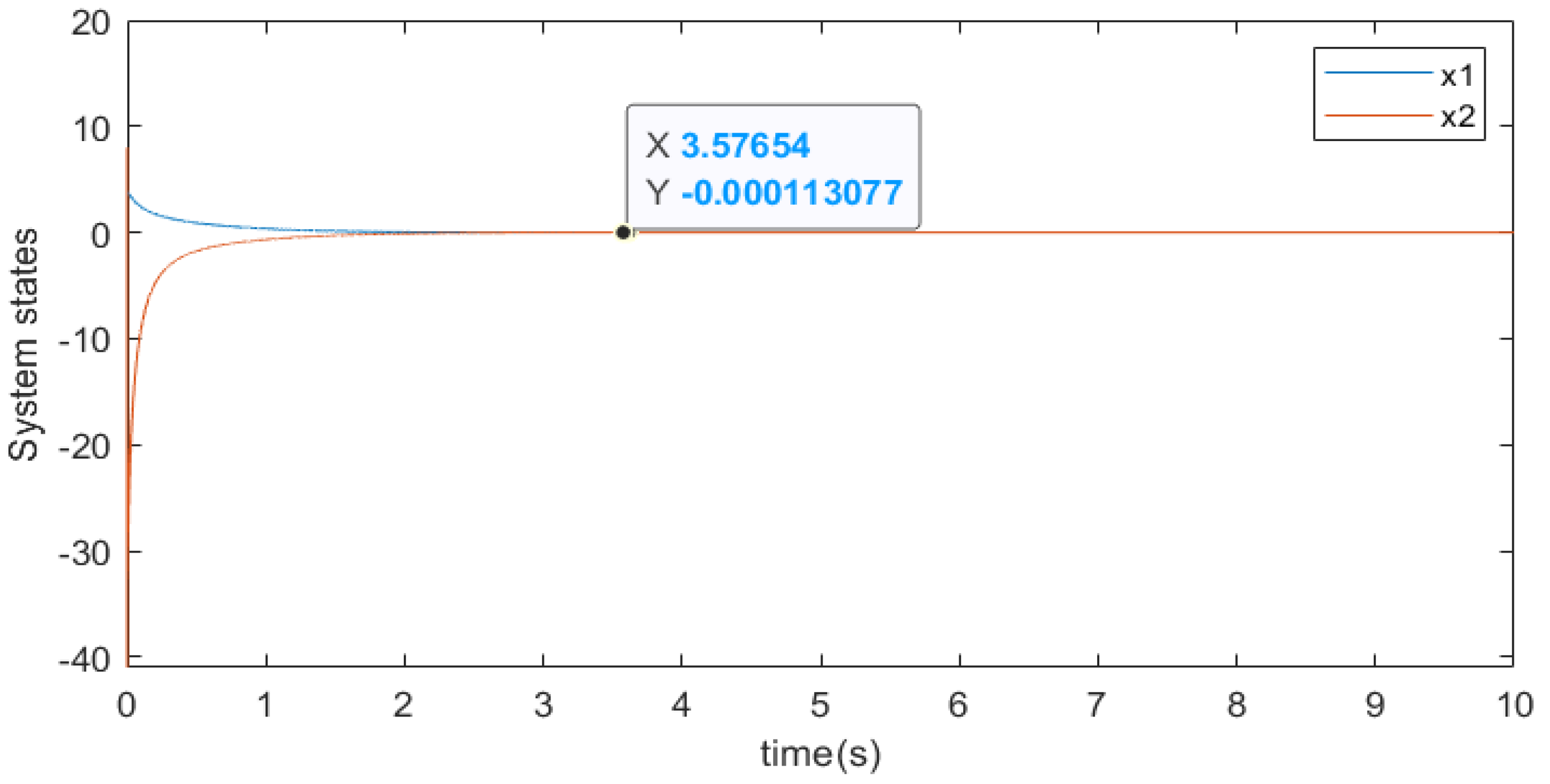
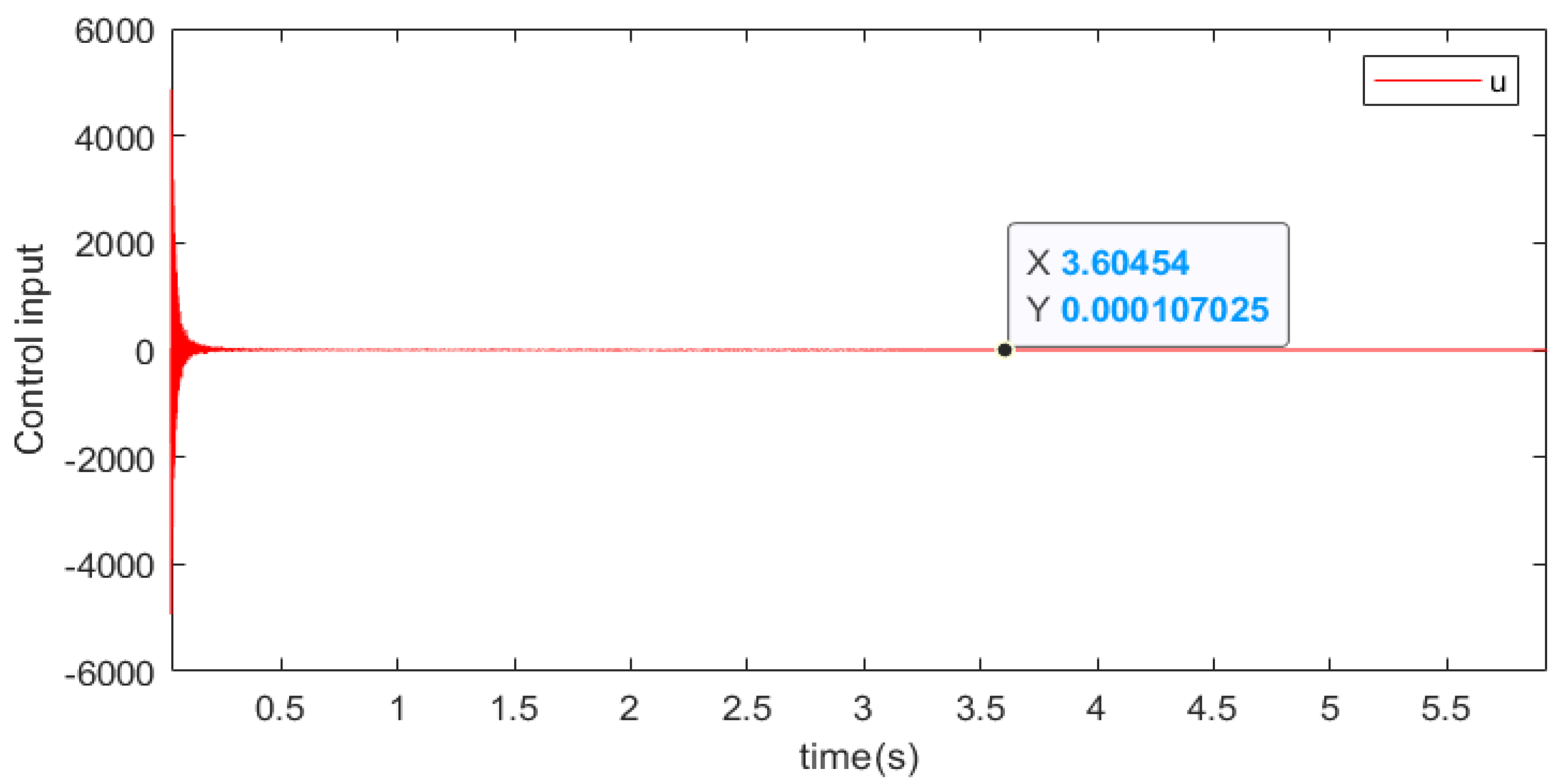
4. Simulation Example
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Deng, H.; Krstić, M. Stochastic nonlinear stabilization-I: A backstepping design. Syst. Control Lett. 1997, 32, 143–150. [Google Scholar] [CrossRef]
- Liu, J.S.; Jiang, P.Z.; Zhang, F.J. Global output feedback stabilization for a class of stochastic non-minimum phase nonlinear systems. Automatics 2008, 44, 1944–1957. [Google Scholar] [CrossRef]
- Chen, W.S.; Jiao, L.C. Finite-time stability theorem of stochastic nonlinear systems. Automatics 2010, 46, 2105–2108. [Google Scholar] [CrossRef]
- Yin, J.; Khoo, S.; Man, Z.; Yu, X. Finite-time stability and instability of stochastic nonlinear systems. Automatics 2011, 47, 2671–2677. [Google Scholar] [CrossRef]
- Fang, L.D.; Ma, L.; Park, J.H.; Ding, S. Finite-time stabilization for a class of stochastic output-constrained systems by output feedback. Int. J. Robust Nonlinear Control 2022, 32, 1256–1271. [Google Scholar] [CrossRef]
- Yu, X.J.; Yin, J.L.; Khoo, S.Y. Generalized Lyapunov criteria on finite-time stability of stochastic nonlinear systems. Automatics 2019, 107, 183–189. [Google Scholar] [CrossRef]
- Khoo, S.; Yin, J.; Man, Z.; Yu, X. Finite-time stabilization of stochastic nonlinear systems in strict-feedback form. Automatics 2013, 49, 1403–1410. [Google Scholar] [CrossRef]
- Yin, J.L.; Khoo, S.Y. Continuous finite-time state feedback stabilizers for some nonlinear stochastic systems. Int. J. Robust Nonlinear Control 2015, 25, 1581–1600. [Google Scholar] [CrossRef]
- Zha, W.T.; Zhai, J.Y.; Fei, S.M.; Wang, Y.J. Finite-time stabilization for a class of stochastic nonlinear systems via output feedback. ISA Trans. 2014, 53, 709–716. [Google Scholar] [CrossRef]
- Wang, H.; Zhu, Q. Finite-time stabilization of high-oredr stochastic nonlinear systems in strict-feedback form. Automatics 2015, 54, 735–745. [Google Scholar] [CrossRef]
- Huang, S.; Xiang, Z. Finite-time stabilization of switched stochastic nonlinear systems with mixed odd and even powers. Automatics 2016, 73, 130–137. [Google Scholar] [CrossRef]
- Fang, L.D.; Ding, S.; Ma, L.; Zhu, D. Finite-time state-feedback control for a class of stochastic constrained nonlinear systems. J. Franklin Inst. 2022, 359, 7415–7437. [Google Scholar] [CrossRef]
- Fang, L.D.; Ma, L.; Ding, S.; Park, J.H. Finite-time stabilization of high-order stochastic nonlinear systems with asymmetric output constraints. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 7201–7213. [Google Scholar] [CrossRef]
- Yu, J.; Yu, S.; Li, J.; Yan, Y. Fixed-time stability theorem of stochastic nonlinear systems. Int. J. Control 2019, 92, 2194–2220. [Google Scholar] [CrossRef]
- Yu, J.; Yu, S.; Li, J.; Yan, Y. Fixed-time stability of stochastic nonlinear systems and its application into stochastic multi-agent systems. IET Control Theory Appl. 2021, 15, 126–135. [Google Scholar] [CrossRef]
- Ma, L.; Mei, K.; Ding, S.; Pan, T. Design of adaptive fuzzy fixed-time HOSM controller subject to asymmetric output constraints. IEEE. Trans. Fuzzy Syst. 2023, 31, 2989–2999. [Google Scholar] [CrossRef]
- Ma, L.; Cheng, C.; Guo, J.; Shi, B.; Ding, S.; Mei, K. Direct yaw-moment control of electric vehicles based on adaptive sliding mode. Math Biosci. 2023, 20, 13334–13355. [Google Scholar] [CrossRef]
- Liang, Y.; Li, Y.X.; Hou, Z. Adaptive fixed-time tracking control for stochastic pure-feedback nonlinear systems. Int. J. Adapt. Control Signal Process. 2021, 35, 1712–1731. [Google Scholar] [CrossRef]
- Parsegov, S.; Polyakov, A.; Shcherbarkov, P. Nonlinear fixed-time control protocol for uniform allocation of agents on a segment. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 642–657. [Google Scholar]
- Aldana-Lopez, R.; Gómez-Gutiérrez, D.; Jiménez-Rodríguez, E.; Sánchez-Torres, J.D.; Defoort, M. Enhancing the settling time estimation of a class of fix-time stable systems. Int. J. Robust Nonlinear Control 2019, 29, 4135–4148. [Google Scholar] [CrossRef]
- Min, H.F.; Xu, S.Y.; Zhang, B.Y.; Ma, Q.; Yuan, D.M. Fixed-time Lyapunov criteria and state-feedback controller design for stochastic nonlinear systems. IEEE/CAA J. Autom. 2022, 9, 1005–1014. [Google Scholar] [CrossRef]
- Bateman, H. Higher Transcendental Functions; McGraw-Hill: New York, NY, USA, 1955. [Google Scholar]
- Erdélyi, A.; Magnus, M.; Oberhettinger, F.; Tricomi, F.G.; Bateman, H. Higher Transcendental Functions; McGraw-Hill: New York, NY, USA, 1953; p. 1. [Google Scholar]
- Liu, W.; Qian, C.J. Adaptive control of nonlinearly paremeterized systems: The smooth feedback case. IEEE. Trans. Autom. Control 2002, 47, 1249–1266. [Google Scholar]
- Lin, W.; Qian, C.J. Adding one power integrator: A tool for global stabilization of high-order lower triangular systems. Syst. Control Lett. 2000, 39, 339–351. [Google Scholar] [CrossRef]
- Li, J.; Qian, C. Global finite-time stabilization of a class of uncertain nonlinear systems using output feedback. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; pp. 2652–2657. [Google Scholar]
- Zhai, J.; Qian, C. Global control of nonlinear systems with uncertain output function using homoge-neous domination approach. Int. J. Robust Nonlinear Control 2012, 22, 1543–1561. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Long, Z.; Zhou, W.; Fang, L.; Zhu, D. Fixed-Time Stabilization of a Class of Stochastic Nonlinear Systems. Actuators 2024, 13, 3. https://doi.org/10.3390/act13010003
Long Z, Zhou W, Fang L, Zhu D. Fixed-Time Stabilization of a Class of Stochastic Nonlinear Systems. Actuators. 2024; 13(1):3. https://doi.org/10.3390/act13010003
Chicago/Turabian StyleLong, Zhenzhen, Wen Zhou, Liandi Fang, and Daohong Zhu. 2024. "Fixed-Time Stabilization of a Class of Stochastic Nonlinear Systems" Actuators 13, no. 1: 3. https://doi.org/10.3390/act13010003
APA StyleLong, Z., Zhou, W., Fang, L., & Zhu, D. (2024). Fixed-Time Stabilization of a Class of Stochastic Nonlinear Systems. Actuators, 13(1), 3. https://doi.org/10.3390/act13010003