


Multistage Micropump System towards Vacuum Pressure


Abstract
1. Introduction
- The first factor motivating the development of mechanical MEMS micro-pumps for generating coarse vacuum is the high-power consumption of conventional mechanical pumps required to achieve coarse vacuum. Depending on the evacuated volume, such pumps require between ~50 W up to several kW of electrical power and weigh 2 kg or more [9]. In many cases, these vacuum pumps have to operate perpetually. In contrast, a MEMS system with cascaded piezo micromembrane pumps requires less than 1 W of power. However, it is worth noting that the evacuated volume is significantly smaller compared to mechanical vacuum pumps.
- In addition to use cases for high vacuum, there are also applications that require portable systems with low absolute pressures. One example is the ion mobility spectrometer (IMS), which requires absolute pressures of about 10 kPa or below [10]. Another potential area of operation is the re-calibration of gas sensors on a portable device, where it is advantageous to apply an absolute pressure of approximately 20 kPa to the gas sensor [11]. Furthermore, several portable and battery-powered sensor systems that require vacuum are available, but no commercially available solutions exist in terms of compact size, weight, and energy consumption to enable handheld devices.
2. Materials and Methods
2.1. Micropump Design Optimized for Small Absolute Pressures
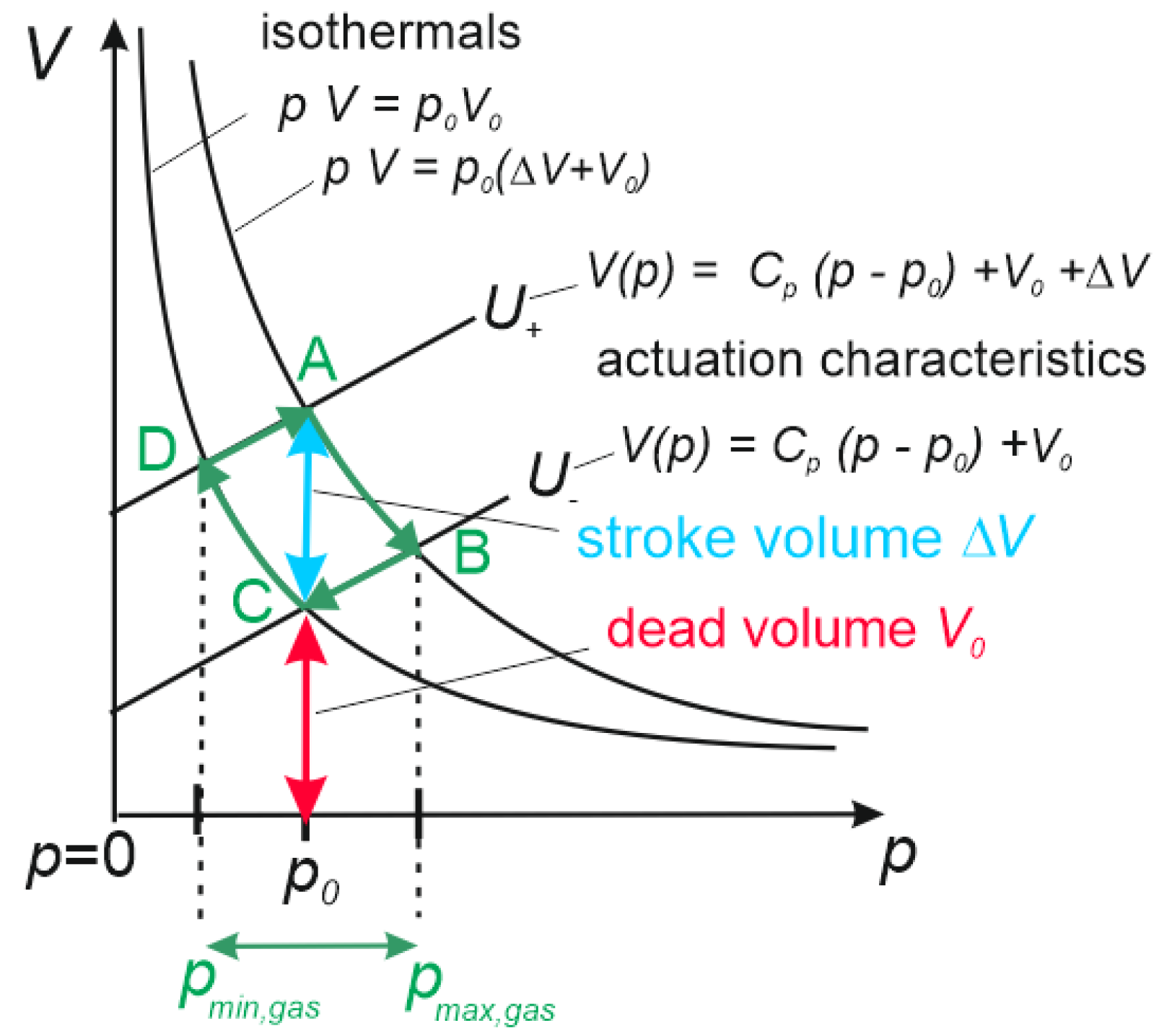
2.2. Pump Cycle of Micropumps Operated with Gases
2.3. Simulation of Performance Parameters of a Single Micropump
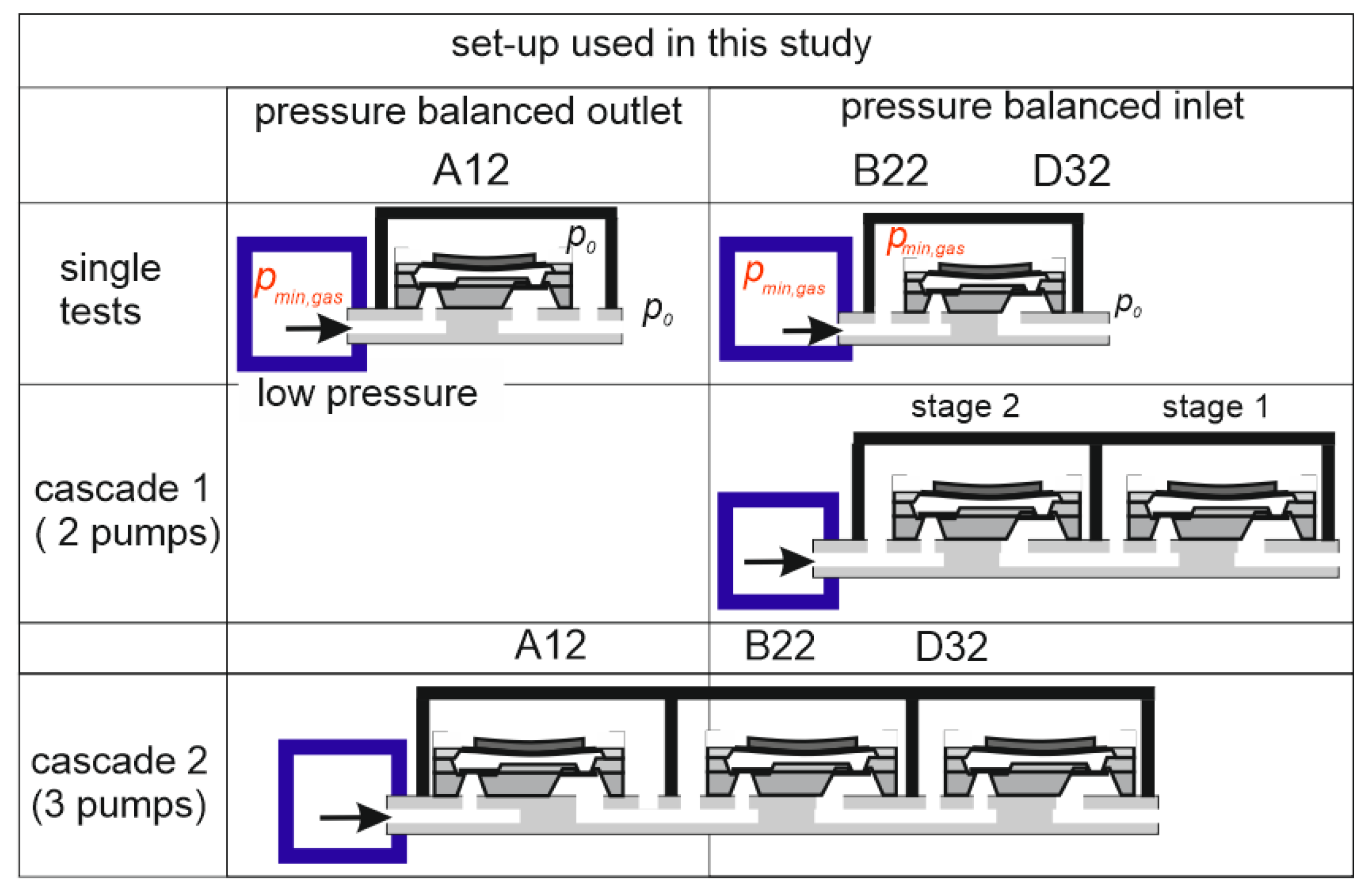
2.4. Cascading Micropumps to Achieve Small Absolute Pressures
- Cascading without pressure balance, where the micropumps are “just connected” in a series;
- Cascading with pressure balanced outlet, where the reference pressure above the piezo of stage is connected to the achieved pressure of stage ; and
- Cascading with pressure balanced inlet, where the reference pressure above the piezo of stage is connected to the achieved pressure of stage .
2.4.1. Under Pressure with Micropumps: Just Serially Connected (Case 1)
2.4.2. Under Pressure with Micropumps: Pressure Balanced (Case 2)
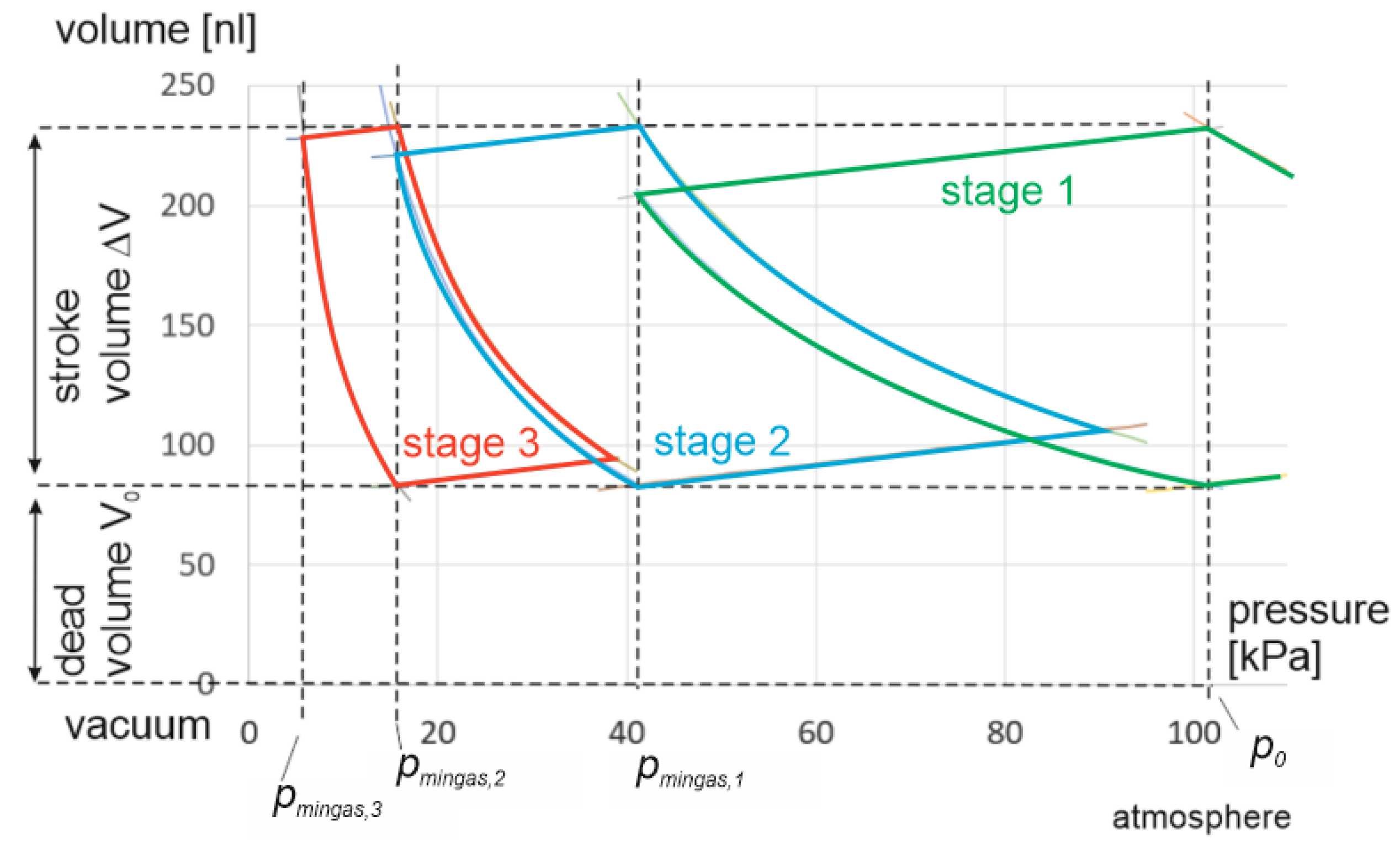
2.5. Simulation of a Pressure-Balanced Multistage Micropump for Negative Pressure
3. Measurements
3.1. Stackable Housing Concept for Pressure-Balanced Micropump
3.2. Minimum Gas Pressure for Single Pumps
3.3. Minimum Gas Pressure for a Multistage of Two Micropumps (Pressure Balanced)
3.4. Minimum Gas Pressure for a Multistage of Three Micropumps (Pressure Balanced)
4. Discussion and Outlook
4.1. Discussion
- Model simplifications: The pressure-balanced configuration model assumes no influence of the pump actuation characteristics through generating negative pressure. This assumption is not true, as the negative pressure generated by the pump lifts the diaphragm upwards away from the pump chamber bottom. As a result, the dead volume of the micropump increases and the compression ratio decreases. This effect reduces the ability to achieve high negative pressures.
- Tolerances in material properties: In the PZT ceramics calculation, a homogeneous material and a homogenous coefficient is assumed. This assumption is inaccurate due to trapped bubbles during the sintering process as well as inhomogeneous powder mixing that may occur in the PZT ceramics production process. Considering that, the bending characteristics of an actuation diaphragm are not symmetric. This influence may reduce the actuator stroke volume and increase the dead volume. Both parameters have a significant influence on the compression ratio, which is the key parameter to achieve low gas pressures.
- Valve leakages: The passive silicon flap valve forms a hard-hard seal between the valve cantilever and valve seat. Although the silicon flap valve is accurately placed above the valve seat and the sealing surface is polished silicon without plastic deformations during bonding, there exist several possibilities for gaps at the valve seat leading to leakages:
- 1.
- After removing a sacrificial layer (nitride/oxide) of in the valve manufacturing process, there is an initial gap between cantilever and valve seat.
- 2.
- Squeeze film damping: The micropump has been operated at a frequency of . In order to reduce the micropump dead volume, the pretension of the diaphragm was adjusted so the diaphragm nearly touches the pump chamber bottom (a distance below was envisaged). This is important to reduce the dead volume . However, at these small pump chamber heights, squeeze film damping occurs, and the time available for supply mode and pump mode might not be sufficient to push the gas out of the region between diaphragm and pump chamber bottom, which reduces the effective stroke volume.
4.2. Outlook
- Reduce leakages of the microvalves: Different design modifications to reduce both discussed gaps in hard-hard sealing are realized.
- Optimize valve bending at small absolute pressures: Mechanical cantilever valves open and close according to the pressure difference generated by the actuator movement. In a multistage with multiple micropumps upstream, just a few of pressure difference is available to open the valve. In an optimized version of this multistage configuration, every stage has its own valve geometry adapted for each pressure regime.
- Research in physical properties at small absolute pressures: With very small remaining gap heights in the micrometer range, the leakage rate is not only defined by the convection with Navier–Stokes equations, but also by self-diffusion. The theory describing the gas leakages of microvalves has to be extended in order to optimize the design of the valves adapted for these self-diffusion properties.
- Model adaption: The model will be extended with an implementation of the actuator diaphragm lifting effect for the pressure-balanced micropump due to the generated negative pressure.
- Actuator optimization: Another potential optimization strategy involves adapting the micropump design as well as the actuation voltage for the individual stages. Especially for stages closer to the vacuum, micropumps with large compression ratios and a reduced blocking pressure are advantageous. The design of the piezo-diaphragm actuator has a trade-off between stroke volume (proportional to the compression ratio) and blocking pressure. Both applications rely on micropumps optimized for these requirements. For these optimizations, the p-V diagram provides a guideline.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bußmann, A.B.; Grünerbel, L.M.; Durasiewicz, C.P.; Thalhofer, T.A.; Wille, A.; Richter, M. Microdosing for drug delivery application—A review. Sens. Actuators A Phys. 2021, 330, 112820. [Google Scholar] [CrossRef]
- Herz, M.; Kibler, S.; Söllner, M.; Scheufele, B.; Richter, M.; Lueth, T.C.; Bock, K. Entwicklung einer energieeffizienten piezoelektrischen Hochfluss-Mikropumpe für Methanol-Brennstoffzellen. Mikrosystemtechnik-Kongress 2011, 4, 74–77. [Google Scholar]
- Heppner, J.D.; Walther, D.C.; Pisano, A.P. The design of ARCTIC: A rotary compressor thermally insulated μcooler. Sens. Actuators A Phys. 2007, 134, 47–56. [Google Scholar] [CrossRef]
- Jousten, K. Handbuch Vakuumtechnik; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2018. [Google Scholar]
- Tassetti, C.-M.; Mahieu, R.; Danel, J.-S.; Peyssonneaux, O.; Progent, F.; Polizzi, J.-P.; Machuron-Mandard, X.; Duraffourg, L. A MEMS electron impact ion source integrated in a microtime-of-flight mass spectrometer. Sens. Actuators B Chem. 2013, 189, 173–178. [Google Scholar] [CrossRef]
- van Someren, B.; van Bruggen, M.J.; Zhang, Y.; Hagen, C.W.; Kruit, P. Multibeam Electron Source using MEMS Electron Optical Components. J. Phys. Conf. Ser. 2006, 34, 1092–1097. [Google Scholar] [CrossRef]
- Grzebyk, T. MEMS Vacuum Pumps. J. Microelectromech. Syst. 2017, 26, 705–717. [Google Scholar] [CrossRef]
- Defense Advanced Research Projects Agency. Mighty Micropumps: Small but Powerful Vacuum Pumps Demonstrated: DARPA Creates Microscale Pumps to Evacuate Tiny Vacuum Chambers. Available online: https://www.darpa.mil/news-events/2013-06-04 (accessed on 9 May 2023).
- Reichelt Chemietechnik GmbH + Co. Mini-Vakuum-Membranpumpe für Gasförmige Medien und Reinstmedien. Available online: https://www.rct-online.de/de/pumpen/gaspumpen/mini-vakuum-membranpumpe-fuer-gasfoermige-medien-und-reinstmedien (accessed on 11 May 2023).
- Cumeras, R.; Figueras, E.; Davis, C.E.; Baumbach, J.I.; Gràcia, I. Review on Ion Mobility Spectrometry. Part 1: Current instrumentation. Analyst 2015, 140, 1376–1390. [Google Scholar] [CrossRef] [PubMed]
- Bäther, W.; Raupers, B.; Lehmann, S. Gas-Measuring Device: Patent Application Publication. U.S. Patent US 2016/0327532 A1, 9 January 2015. [Google Scholar]
- Murata Manufacturing Co., Ltd. Microblower MZB3004T04: Microblower (Air Pump). Available online: https://www.murata.com/en-eu/products/mechatronics/fluid/overview/lineup/microblower_mzb3004t04 (accessed on 17 May 2023).
- Astle, A.; Paige, A.; Bernal, L.P.; Munfakh, J.; Kim, H.; Najafi, K. Analysis and Design of Multistage Electrostatically-Actuated Micro Vacuum Pumps. In Microelectromechanical Systems; ASMEDC: New York, NY, USA, 2002; pp. 477–486. [Google Scholar]
- Kim, H.; Astle, A.A.; Najafi, K.; Bernal, L.P.; Washabaugh, P.D. An Integrated Electrostatic Peristaltic 18-Stage Gas Micropump With Active Microvalves. J. Microelectromech. Syst. 2015, 24, 192–206. [Google Scholar] [CrossRef]
- Zengerle, R.; Ulrich, J.; Kluge, S.; Richter, M.; Richter, A. A bidirectional silicon micropump. Sens. Actuators A Phys. 1995, 50, 81–86. [Google Scholar] [CrossRef]
- Leistner, H.; Wackerle, M.; Congar, Y.; Anheuer, D.; Roehl, S.; Richter, M. Robust Silicon Micropump of Chip Size 5 × 5 × 0.6 mm3 with 4 mL/min Air and 0.5 mL/min Water Flow Rate for Medical and Consumer Applications. In Actuator 2021, Proceedings of the International Conference and Exhibition on New Actuator Systems and Applications: GMM Conference, Online Event, 17–19 February 2021; Schlaak, H., Ed.; VDE Verlag GmbH: Berlin, Germany; Offenbach, Germany, 2021; pp. 113–116. [Google Scholar]
- Richter, M.; Wackerle, M.; Kibler, S.; Biehl, M.; Koch, T.; Müller, C.; Zeiter, O.; Nuffer, J.; Halter, R. Miniaturized drug delivery system TUDOS with accurate metering of microliter volumes. In Proceedings of the SENSOR, International Conference on Sensors and Measurement Technology, 16, AMA Conferences, Nürnberg, Germany, 14–16 May 2013; pp. 420–425. [Google Scholar]
- Du, M.; Ma, Z.; Ye, X.; Zhou, Z. On-chip fast mixing by a rotary peristaltic micropump with a single structural layer. Sci. China Technol. Sci. 2013, 56, 1047–1054. [Google Scholar] [CrossRef]
- Pankhurst, P.; Abdollahi, Z.M. Evaluation of a novel portable micro-pump and infusion system for drug delivery. IEEE Eng. Med. Biol. Soc. Annu. Conf. 2016, 2016, 465–468. [Google Scholar]
- Tanaka, S.; Tsukamoto, H.; Miyazaki, K. Development of Diffuser/Nozzle Based Valveless Micropump. J. Fluid Sci. Technol. 2008, 3, 999–1007. [Google Scholar] [CrossRef]
- Wong, C.C.; Aeschliman, D.P.; Henfling, J.F.; Sniegowski, J.J.; Rodgers, M.S. Development of an Ejector-Driven Micro-Vacuum Pump. In Micro-Electro-Mechanical Systems (MEMS); American Society of Mechanical Engineers: New York, NY, USA, 2001; pp. 485–493. [Google Scholar]
- Grzebyk, T.; Górecka-Drzazga, A.; Dziuban, J.A. Glow-discharge ion-sorption micropump for vacuum MEMS. Sens. Actuators A Phys. 2014, 208, 113–119. [Google Scholar] [CrossRef]
- Green, S.R.; Malhotra, R.; Gianchandani, Y.B. Sub-Torr Chip-Scale Sputter-Ion Pump Based on a Penning Cell Array Architecture. J. Microelectromech. Syst. 2013, 22, 309–317. [Google Scholar] [CrossRef]
- Gupta, N.K.; An, S.; Gianchandani, Y.B. A monolithic 48-stage Si-micromachined Knudsen pump for high compression ratios. In Proceedings of the 2012 IEEE 25th International Conference on Micro Electro Mechanical Systems (MEMS), Paris, France, 29 January–2 February 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 152–155. [Google Scholar]
- Vargo, S.E.; Muntz, E.P. Initial results from the first MEMS fabricated thermal transpiration-driven vacuum pump. In Proceedings of the AIP Conference Proceedings, Sydney, Australia, 9–14 July 2000; pp. 502–509. [Google Scholar]
- Herz, M.; Horsch, D.; Wachutka, G.; Lueth, T.C.; Richter, M. Design of ideal circular bending actuators for high performance micropumps. Sens. Actuators A Phys. 2010, 163, 231–239. [Google Scholar] [CrossRef]
- Lee, S.; Yee, S.Y.; Besharatian, A.; Kim, H.; Bernal, L.P.; Najafi, K. Adaptive gas pumping by controlled timing of active microvalves in peristaltic micropumps. In Proceedings of the TRANSDUCERS 2009—2009 International Solid-State Sensors, Actuators and Microsystems Conference, Denver, CO, USA, 21–25 June 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 2294–2297. [Google Scholar]
- Sandoughsaz, A.; Besharatian, A.; Bernal, L.P.; Najafi, K. Modular stacked variable-compression ratio multi-stage gas micropump. In Proceedings of the 2015 Transducers—2015 18th International Conference on Solid-State Sensors, Actuators and Microsystems (Transducers), Anchorage, AK, USA, 21–25 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 704–707. [Google Scholar]
- Besharatian, A.; Kumar, K.; Peterson, R.L.; Bernal, L.P.; Najafi, K. Valve-only pumping in mechanical gas micropumps. In Proceedings of the 2013 Transducers & Eurosensors XXVII: The 17th International Conference on Solid-State Sensors, Actuators and Microsystems (Transducers & Eurosensors XXVII), Barcelona, Spain, 16–20 June 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 2640–2643. [Google Scholar]
- Besharatian, A.; Kumar, K.; Peterson, R.L.; Bernal, L.P.; Najafi, K. A Scalable, modular, multi-stage, peristaltic, electrostatic gas micro-pump. In Proceedings of the 2012 IEEE 25th International Conference on Micro Electro Mechanical Systems (MEMS 2012), Paris, France, 29 January–2 February 2012; pp. 1001–1004. [Google Scholar]
- Le, S.; Hegab, H. Investigation of a multistage micro gas compressor cascaded in series for increase pressure rise. Sens. Actuators A Phys. 2017, 256, 66–76. [Google Scholar] [CrossRef]
- McNamara, S.; Gianchandani, Y.B. A micromachined Knudsen pump for on-chip vacuum. In Proceedings of the TRANSDUCERS ’03, 12th International Conference on Solid-State Sensors, Actuators and Microsystems, Digest of Technical Papers (Cat. No.03TH8664), Boston, MA, USA, 8–12 June 2003; IEEE: Piscataway, NJ, USA, 2003; pp. 1919–1922. [Google Scholar]
- Richter, M. Modellierung und Experimentelle Charakterisierung von Mikrofluidsystemen und deren Komponenten. Ph.D. Thesis, Universität der Bundeswehr München, München, Germany, 1998. [Google Scholar]
- Herz, M. Optimierung der Förderrate einer Piezoelektrischen Hochleistungs-Mikropumpe. Ph.D. Thesis, Technische Universität München, München, Germany, 2011. [Google Scholar]
- PI Ceramic GmbH. Piezoelectric Ceramic Products: Fundamentals, Characteristics and Applications. Catalogue 2016, CAT125E, R3. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbol | Value | Unit |
|---|---|---|---|
| Silicon Material Parameter | Pa | ||
| 1 | |||
| 1/K | |||
| Piezoelectric Actuator Material Parameter | Pa | ||
| 1/K | |||
| m/V | |||
| F | |||
| Micropump Geometry Parameter | m | ||
| m | |||
| m | |||
| Piezo Geometry Parameter | m | ||
| m | |||
| Environment Properties | kPa | ||
| °C | |||
| Fluid Properties | kg/m3 | ||
| Pa s | |||
| Operation Properties | V | ||
| V |
| Description | Symbol | Value | Unit |
|---|---|---|---|
| Performance parameter | 149 | nL | |
| 322 | kPa | ||
| 189.5 | kPa | ||
| 41.3 | kPa | ||
| Design parameter | 84 | nL | |
| ɛ | 1.79 | 1 | |
| Simulation output | 11.58 | µm | |
| 0.96 | µm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Richter, M.; Anheuer, D.; Wille, A.; Congar, Y.; Wackerle, M. Multistage Micropump System towards Vacuum Pressure. Actuators 2023, 12, 227. https://doi.org/10.3390/act12060227
Richter M, Anheuer D, Wille A, Congar Y, Wackerle M. Multistage Micropump System towards Vacuum Pressure. Actuators. 2023; 12(6):227. https://doi.org/10.3390/act12060227
Chicago/Turabian StyleRichter, Martin, Daniel Anheuer, Axel Wille, Yuecel Congar, and Martin Wackerle. 2023. "Multistage Micropump System towards Vacuum Pressure" Actuators 12, no. 6: 227. https://doi.org/10.3390/act12060227
APA StyleRichter, M., Anheuer, D., Wille, A., Congar, Y., & Wackerle, M. (2023). Multistage Micropump System towards Vacuum Pressure. Actuators, 12(6), 227. https://doi.org/10.3390/act12060227