1. Introduction
The control valve, as a control terminal actuator in a smart plant, is the control part of the fluid transfer system [
1], which has functions related to cutting off, regulating, grading, preventing backflow, regulating pressure, grading, or eliminating overflow pressure [
2]. Pneumatic control valves inevitably have non-linear characteristics such as hysteresis and dead zones due to their sealing performance, friction, and flow characteristic curves [
3]. In the process of industrial production, if the valve position is not properly controlled so that the oscillation is too large, it will increase the wear and tear of the valve stem, which can cause severe shock and reduce the life of the control valve. If the adjustment time is too long, this is not conducive to production efficiency. Pneumatic control valves not only need to quickly and smoothly reach the specified valve position but also need to have a high degree of accuracy. The performance of a control valve includes not only the design and selection of the hardware system but also the control algorithm inside the valve positioner, which often plays a critical role [
4]. The hardware adjustment and update of the control valve and the innovation and improvement of the control algorithm are inseparable from the mechanism modeling and simulation experiments, based on which various scholars, enterprises, and universities at home and abroad have made significant contributions.
Sherear [
5] created a linearized mathematical model of the cylinder midpoint position and obtained a differential equation with unknown parameters. Martin and McCloy [
6] similarly explored the model function to Sherear’s model via extrapolation, but the model was not rigorously experimentally validated and the relevant parameters were not specified. Wang [
7] mathematically modeled the pneumatic PCM (pulse code modulation) position system using the positioning discrimination modeling method based on the knowledge of linear system theory. Aziz and Bone [
8] described a novel automatic adjustment method for the precise position control of pneumatic actuators, which combines a model-based offline analysis and online iterations. Zhou, Shen, Tamura, Nakazawa, and Henmi [
9] proposed an adaptive nonlinear switching-type robust control strategy to adjust the valve position in a closed-loop manner, and showed experimentally that adaptive nonlinear control is effective in reducing friction and discharge fluctuations and ensures good performance in the presence of unknown plant parameters. Nguyen, Leavitt, Jabbari, and Bobrow [
10] used sliding film control for pneumatic systems to extend the valve life and provide good tracking and relatively low steady-state position errors. Zhu, Ma, and Schock [
11] developed an iterative model-based predictive control scheme for the control of an electric–pneumatic valve actuator (EPVA) for exhausts. Xu [
12] published two strategic methods of variable forward PWM duty cycles, linearization and segmented. Lu [
13] used experimental calculations and technical identification to construct a working mechanism model of intelligent valve positioner with nonlinear characteristics, and proposed the use of a Bang-Bang/PID segmented controller with an inverse gap compensation algorithm to eliminate the gap characteristics, which can finally make the controller have a good output effect and control quality. Fan [
14] described a numerical simulation model of a solenoid valve and improved and optimized it so that its overall performance was improved. Wang [
15] explored the effects of the valve vibration amplitude, period, frequency, and velocity on transient injection characteristics and developed a transient computational fluid dynamics (CFD) model of a gas fuel injection device, whose results showed that there is a linear relationship between the transient mass flow rate and the transient lift during the vibration process. Zhang [
16] proposed an air pressure control method similar to PWM (SPWM). By controlling the opening and closing time of the solenoid valve, the brake air pressure can be precisely adjusted to improve the dynamic response characteristics of the system. Xu [
17] proposed a valve opening control scheme based on variable universe fuzzy auto-disturbance rejection. The simulation results showed that the variable universe fuzzy auto-disturbance rejection controller has strong anti-interference ability and good adaptability, can quickly and stably reach the preset control opening, and can achieve precise and stable control of the valve opening.
The standard pneumatic control valve model is not accurate enough because it does not take into account the fluctuation of the gas source air pressure, system sticking, and dead zones. Although some forward-looking work has been done for the pneumatic control valve, the current pneumatic control valve still has the problems of inaccurate valve position control, a considerable amount of overshoot, and a long adjustment time, so this paper uses an improved biogeographic optimization algorithm to fit the control system open-loop response curve and derive a new pneumatic control valve model. In a previous publication [
18], the authors proposed an improved biogeography-based optimization algorithm with improvements including the chaotic initialization of populations, tuning of migration models, and updating of migration operators and variation operators. In addition, the two-degree-of-freedom fractional-order internal mode control method was applied to the valve position control of the pneumatic control valve, and the effectiveness of the proposed control valve position control method was demonstrated using a simulation and experiment.
5. Simulation and Experimentation
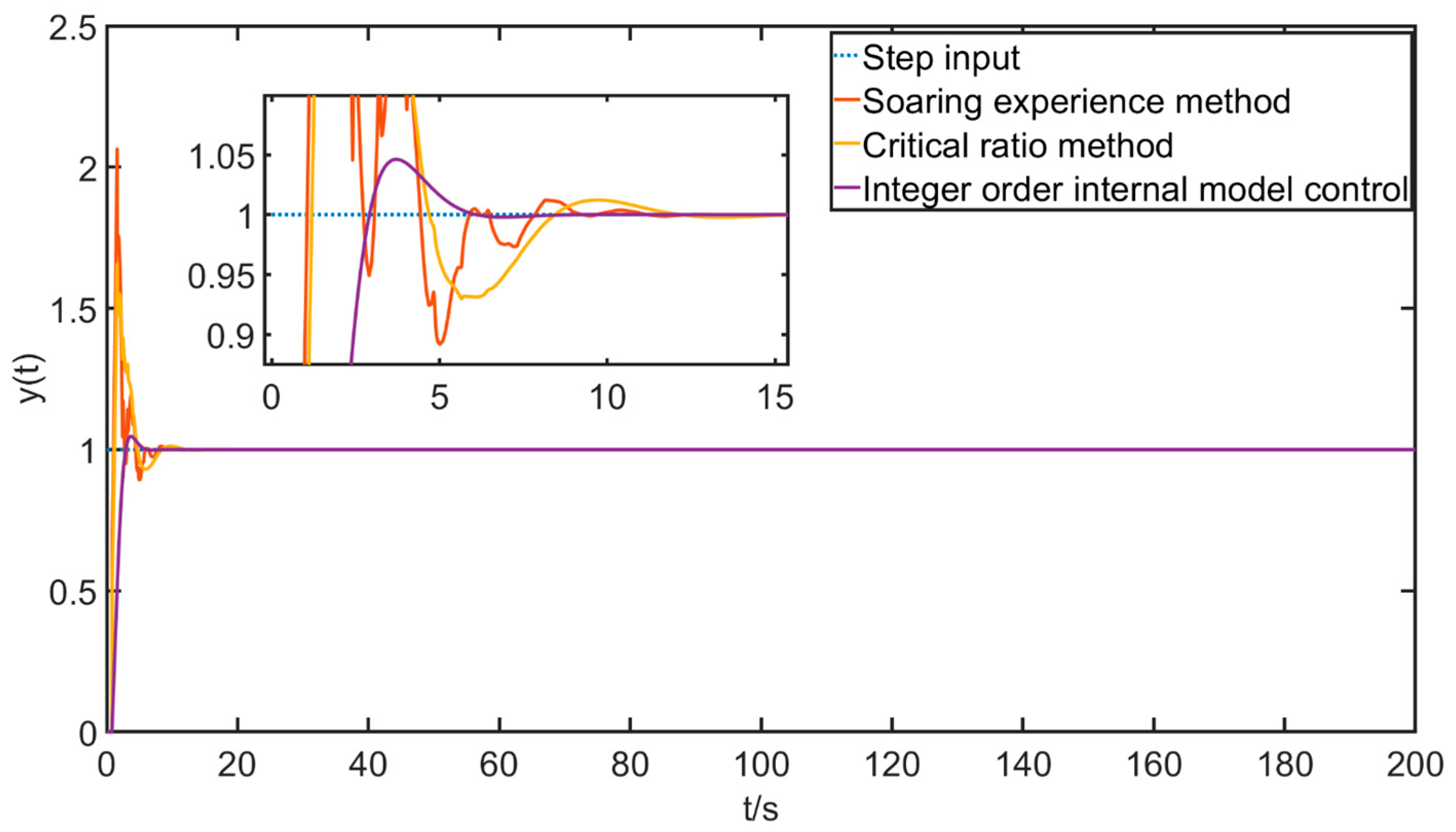
For the integer-order pneumatic control valve model of Equation (14), there are three control methods, namely Equation (19), the fly-up empirical method, Equation (20), the critical proportional method, and Equation (37), the integer-order internal mode PI control, and the control flow simulation model is constructed in Simulink as shown in
Figure 10:
Its step control response curve is shown in
Figure 11.
The dynamic performance response indicators are shown in
Table 3.
The relevant evaluation indicators are explained as follows. The overshoot is the percentage of the peak value exceeding the final value, the rise time is the time required for the step response to go from 10% to 90% of the final value, the peak time is the time for the step response to cross the final value and reach the first peak, and the adjustment time is the minimum time required for the step response to reach and remain within a 5% error band of the final value. From the chart together, it can be seen that although the Z-N critical proportion method has a better control effect and quality than the fly-up empirical method to some extent, it still fails to meet the demand for industrial control, while the integer-order internal mode PI control has a better effect.
Adding a perturbation error of
at
s and lasting
s to examine the robust stability of several control algorithms, there is the following as shown in
Figure 12.
It can be seen that the integer-order internal mode controller can regulate the output to a given value faster and has a better ability to suppress external disturbances.
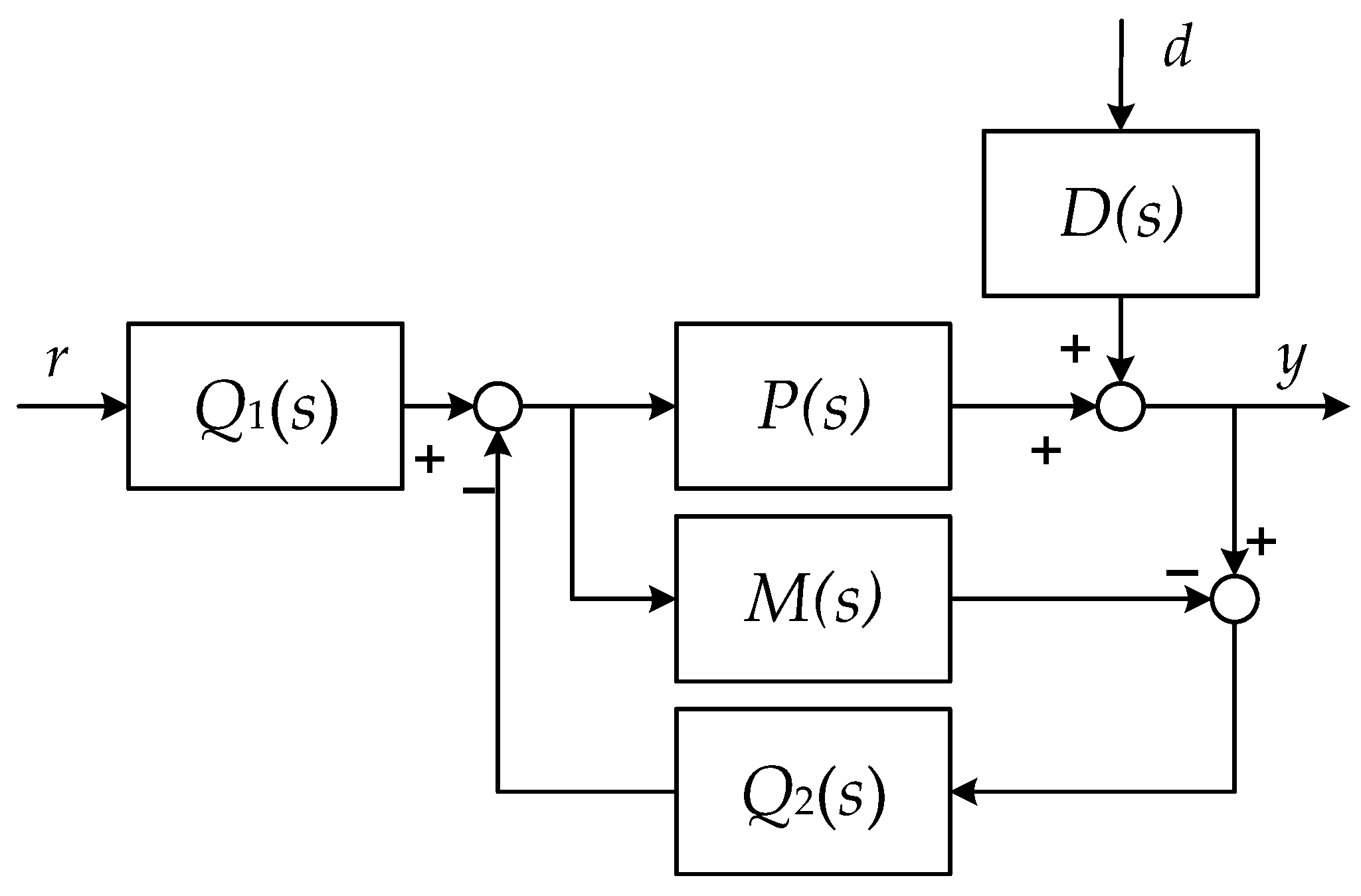
The integer-order internal mode controller with the best control effect is compared with the fractional-order internal mode control with one degree of freedom from Equation (50) for the fractional-order pneumatic control valve model of Equation (15), the fractional-order internal mode PI control of Equation (51), and the two-degree-of-freedom fractional-order internal mode control of Equations (59) and (60) for the MATLAB simulation, and the Simulink simulation model is shown in
Figure 13.
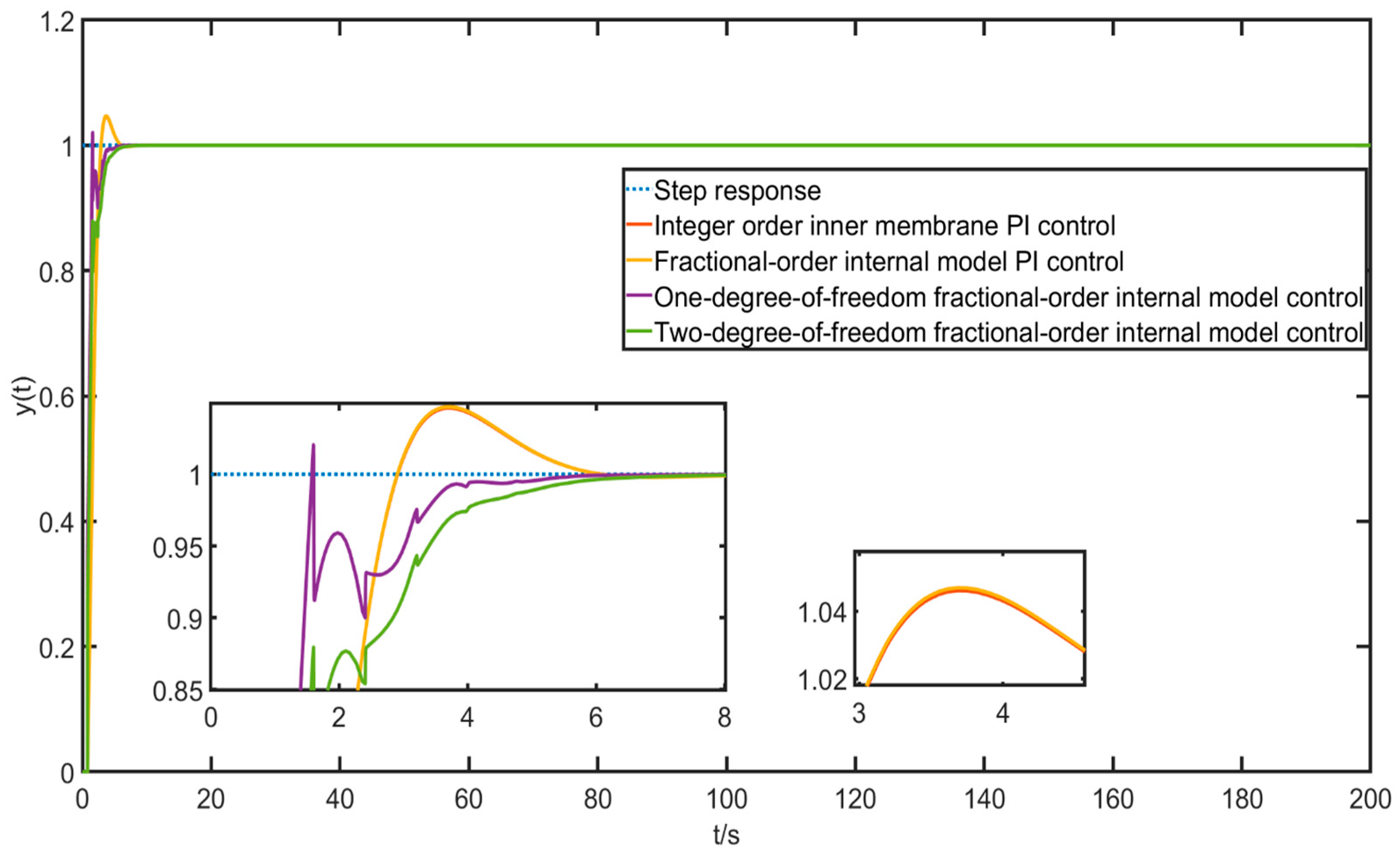
The step response curve is shown in
Figure 14 below.
The dynamic performance response indicators are shown in
Table 4.
It can be seen here that the same method of a control algorithm for integer-order or fractional-order models, i.e., integer-order internal mode PI control and fractional-order internal mode PI control, has almost the same effect (they all have the advantages of small overshoot and fast speed), so the following sections will not compare fractional-order internal mode PI control methods, and integer-order internal mode PI control will be used instead.
In order to further analyze the differences between several control algorithms and to find the optimal control algorithm, given a sinusoidal signal as the desired signal of
, the simulation results and tracking errors are obtained as shown in
Figure 15 and
Figure 16 below.
As can be seen from the figure, although the rising curve of the integer-order internal mode PI control is smoother, the time used to converge to a steady state will be longer; that is, the tracking effect will be slightly delayed, while the tracking effect and error of the one-degree-of-freedom fractional-order internal mode control are better but the rising curve jitter in
is more violent, more moderate, or the rise speed and tracking effect are available for the two-degree-of-freedom fractional-order internal mode control. Given a more severe square wave signal
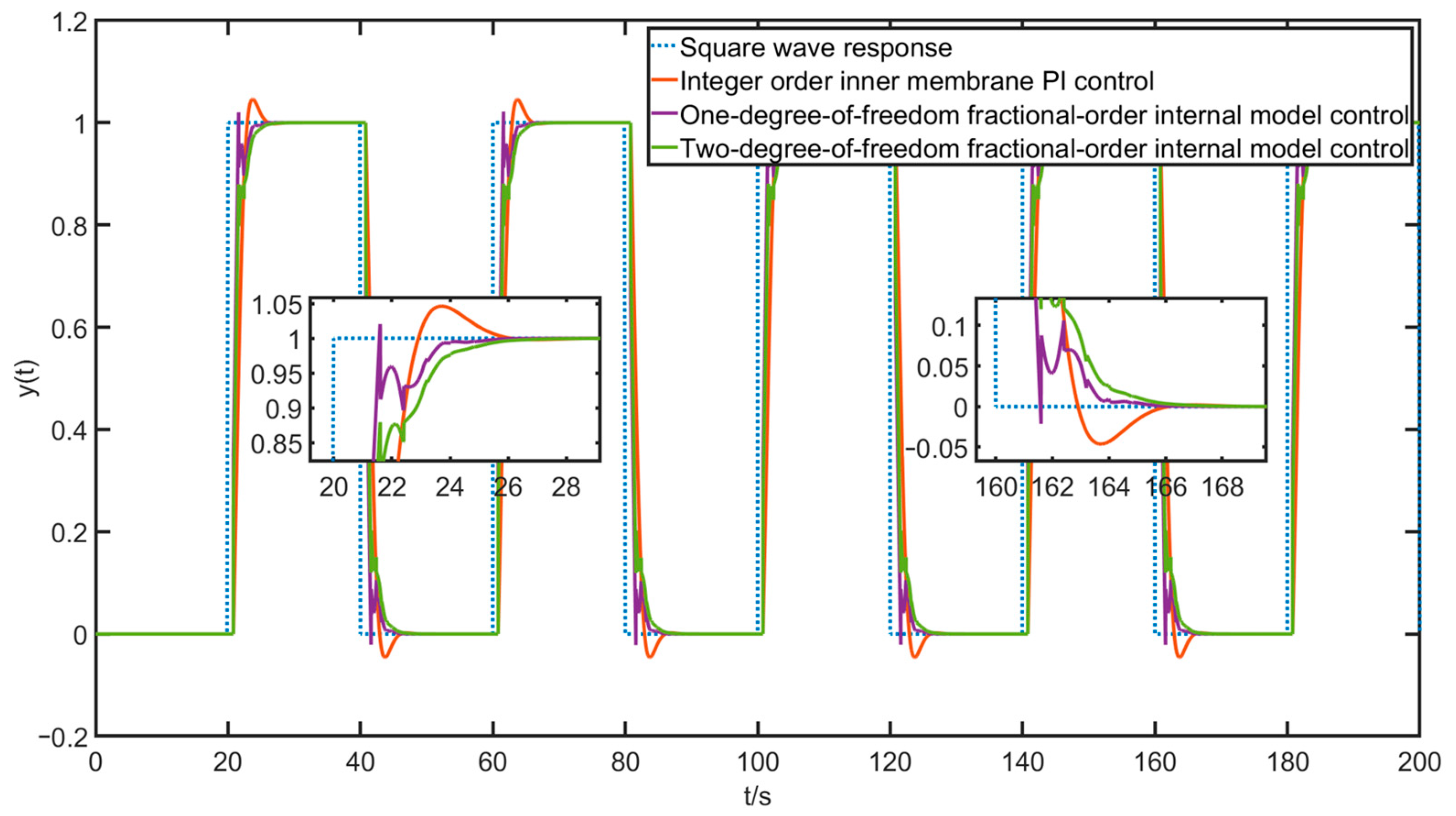
, there are the following simulation results and tracking errors as shown in
Figure 17 and
Figure 18.
From the simulation curve of the square wave signal, the tracking error, and the above step and sine simulation experiments, the following conclusions can be further drawn. The overshoot of the two-degree-of-freedom fractional-order internal mode control algorithm is almost , and the rising curve is relatively smooth with almost no excess oscillation. Although the time used to reach the steady state is not as fast as the absolute radical one, it is acceptable within certain limits, which proves the effectiveness of the fractional-order model and the superiority of the two-degree-of-freedom fractional-order internal mode control.
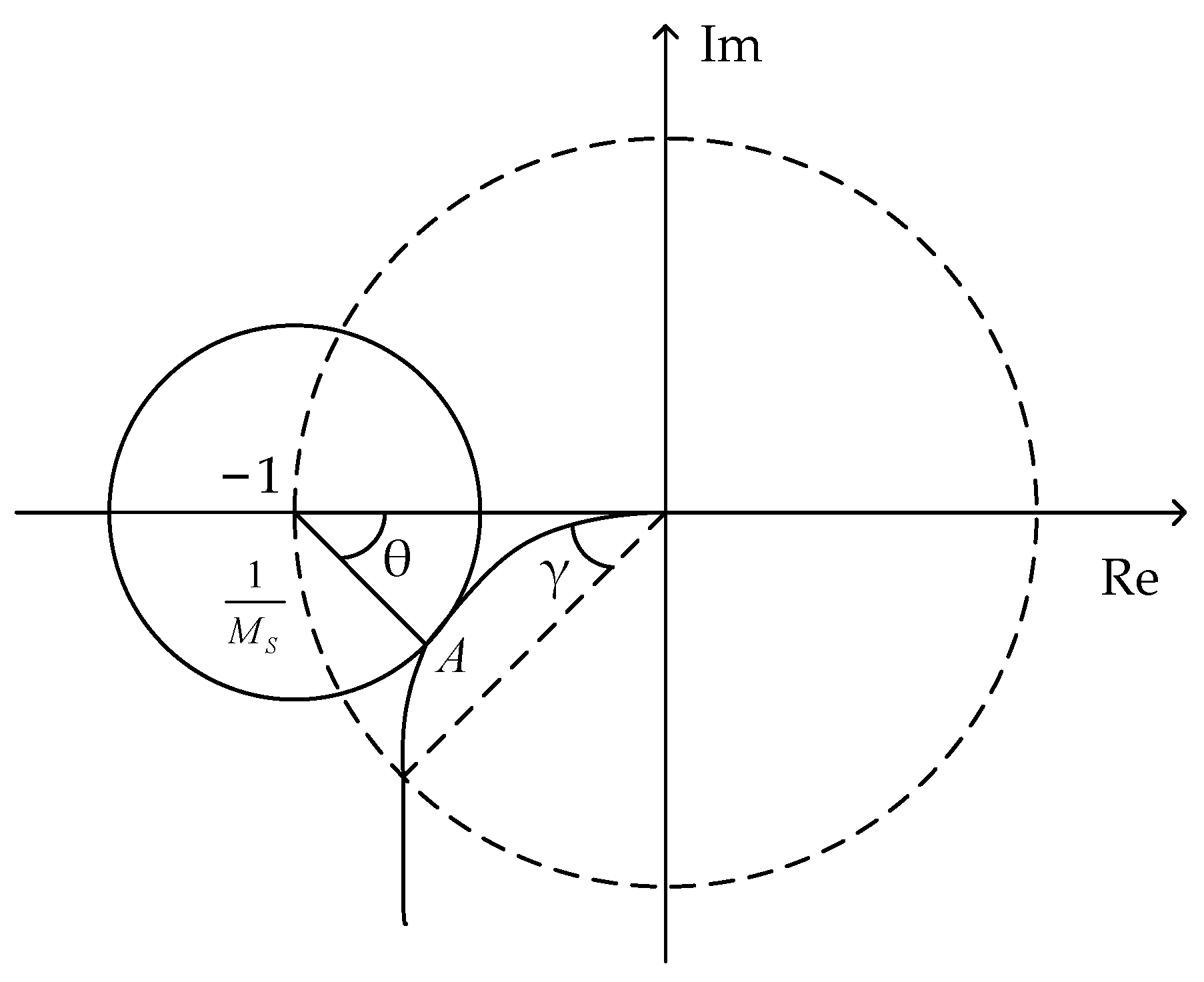
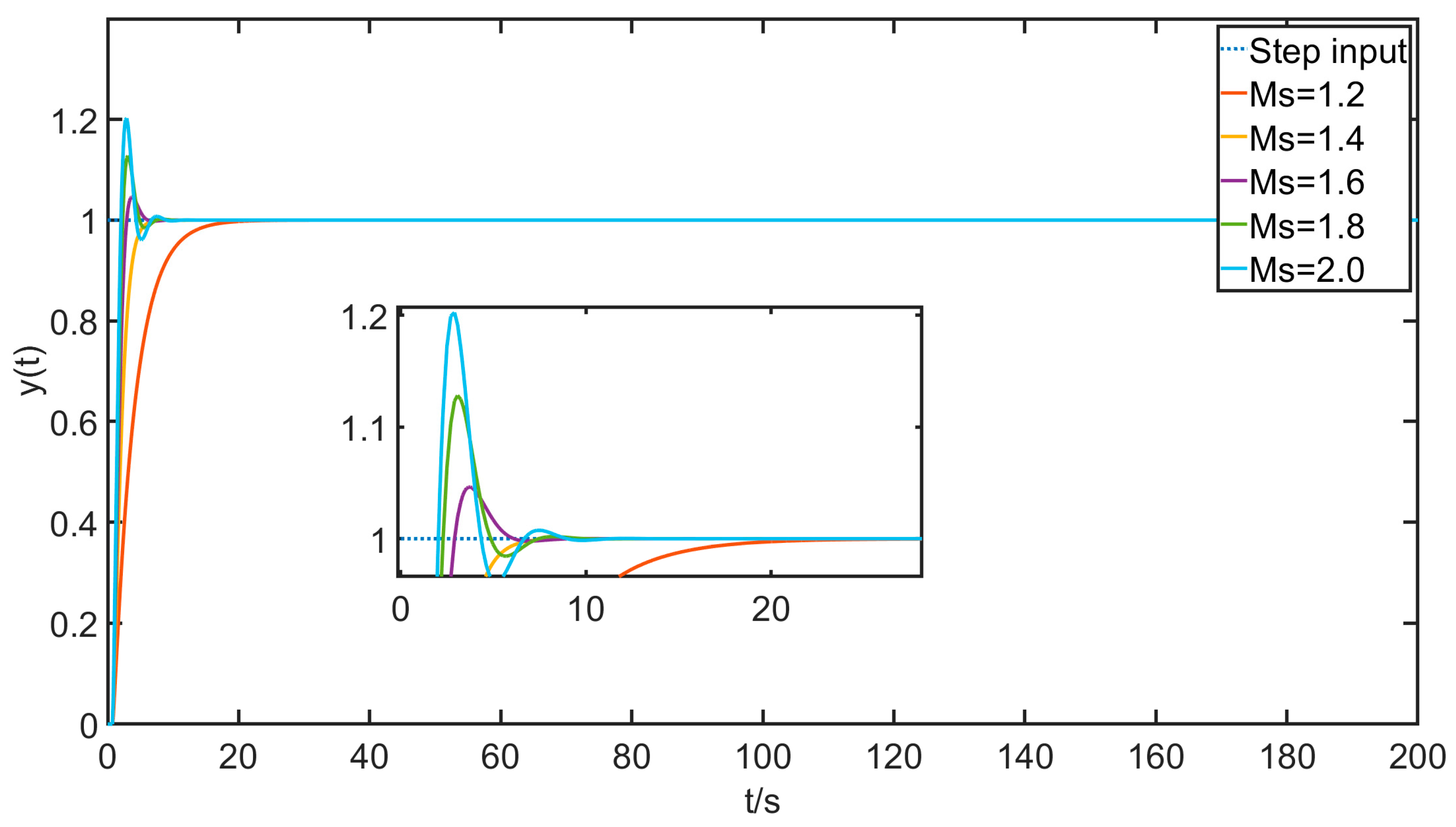
The above simulation experiments, regarding the value of the maximum sensitivity
, are taken as the value
, and according to Equation (34) we know that
. The range of values of
is
, and the range of values is taken every 0.2. Simulation experiments are carried out with integer-order internal mode PI control algorithm, as shown in
Figure 19 and
Table 5.
After analyzing the data shown in the above figure and table, it is clear that the overshoot increases dramatically with the increase in , while the time required to reach the steady state or the dynamic response speed becomes better and better, which is a matter of trade-off and requires the researcher to make the right choice of for the control demand and quality in the actual situation.
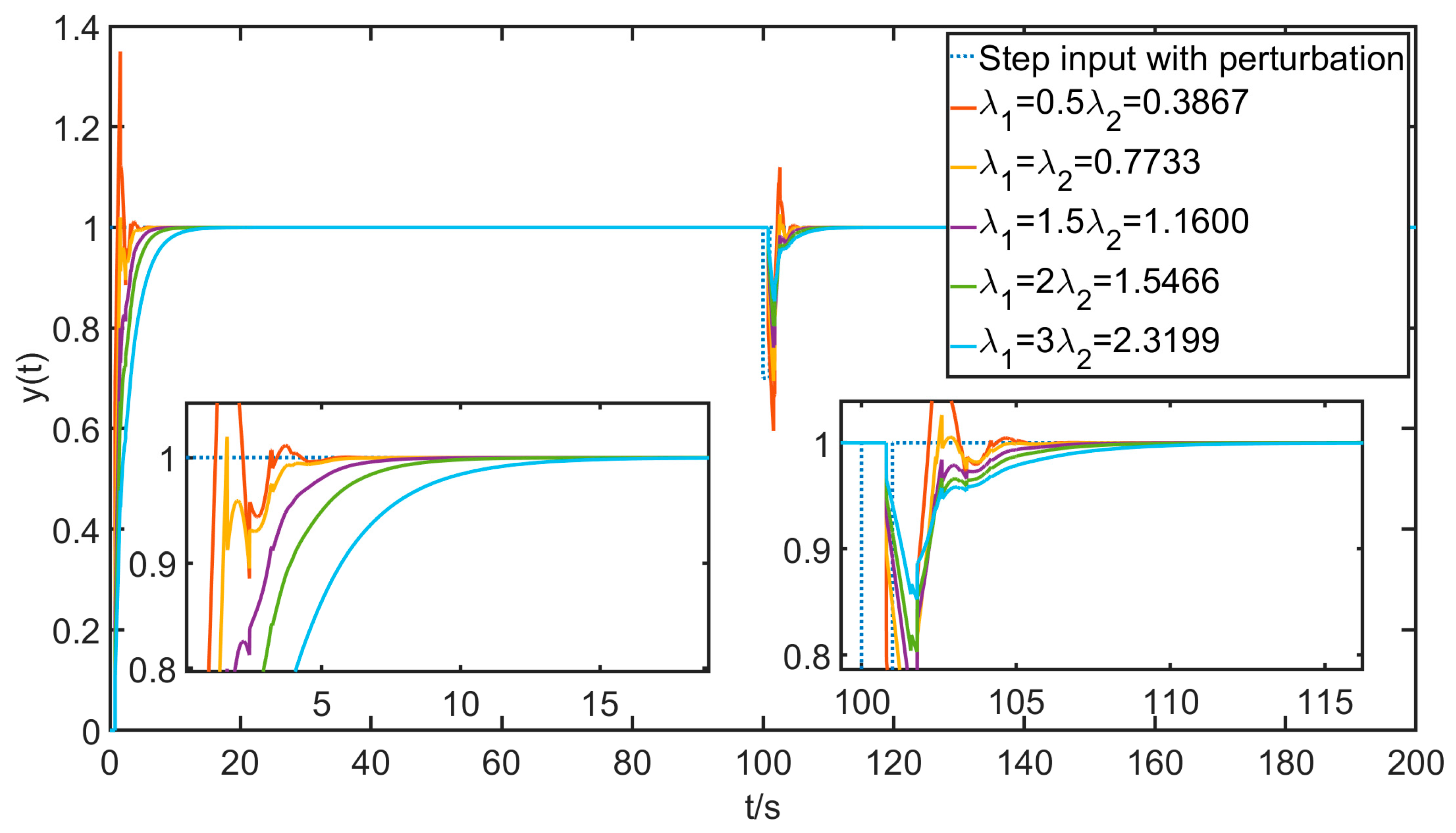
The above simulation experiments on two-degree-of-freedom fractional-order internal mode control have been kept at the value of
for
, and now the simulation experiments are conducted with different values of
while maintaining
and
, with the results shown in
Figure 20 and
Table 6 below.
As can be seen from the graphs and tables, when , the two-degree-of-freedom internal mode control will be out of tune, failing to meet the control requirements and becoming even worse than the general one-degree-of-freedom internal mode control, which has no research value, while when , this two-degree-of-freedom internal mode control is equivalent to the one-degree-of-freedom internal mode control. Finally, as for the case of , the control effect is significantly improved; as increases, the rising curve becomes smoother and more resistant to disturbances, but the adjustment time required to reach the 5% error band increases significantly. Therefore, it is also necessary for the researcher to take the appropriate value of for the control needs and quality in the actual situation.
In the MATLAB simulation in the above subsection, the superiority of the two-degree-of-freedom fractional-order internal mode control algorithm has been proved to a certain extent. To further verify this algorithm, the LabVIEW semi-physical simulation platform built in the laboratory will be optimized, and the pneumatic control valve system programs of integer-order internal mode PI control and two-degree-of-freedom fractional-order internal mode control will be built and experimentally analyzed, respectively.
The hardware and software semi-physical platform is set up for experimental research, and the step, sine, and square wave signals are set as the predetermined expected inputs of the valve level in the upper computer LabVIEW, while the above two control algorithms are experimented with. The experimental environment is described as follows. The regulating valve model is Lotte Autocontrol ZJHP and the temperature is 25 degrees Celsius, with normal atmospheric pressure. A physical picture of the experimental platform is shown in
Figure 21.
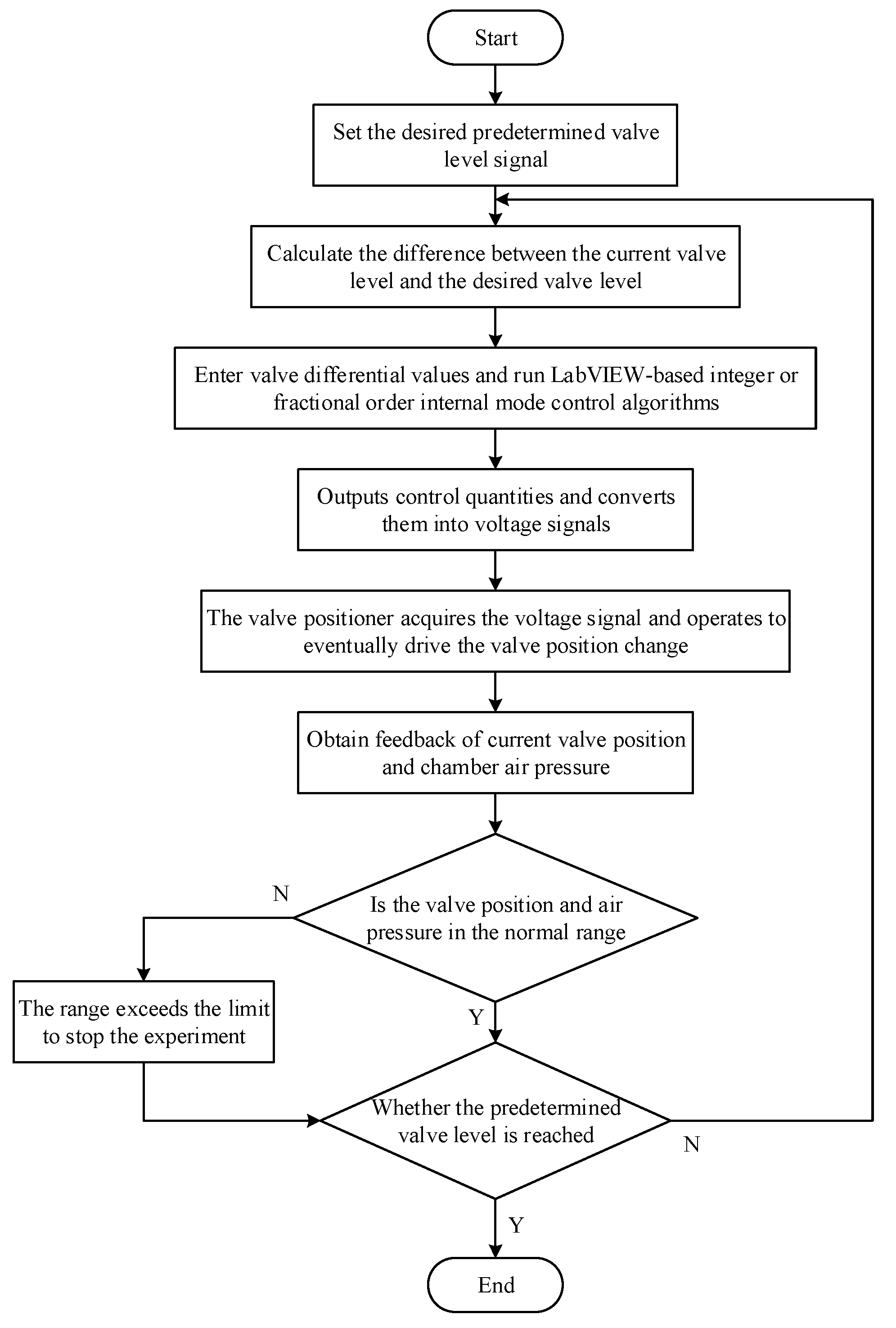
A block diagram of the system control operation flow of the LabVIEW-based semi-physical simulation experiment is shown in
Figure 22 below.
Firstly, the experiment on the step signal is conducted to mainly test the transient response performance of the control algorithm, given the desired input of 50% valve position opening. After the experiment, the valve position opening data collected by the data acquisition card are recorded with the gas chamber air pressure data and the response curve is generated in MATLAB. The results of the step experiment are shown in
Figure 23,
Figure 24 and
Figure 25.
The performance indicators are shown in
Table 7.
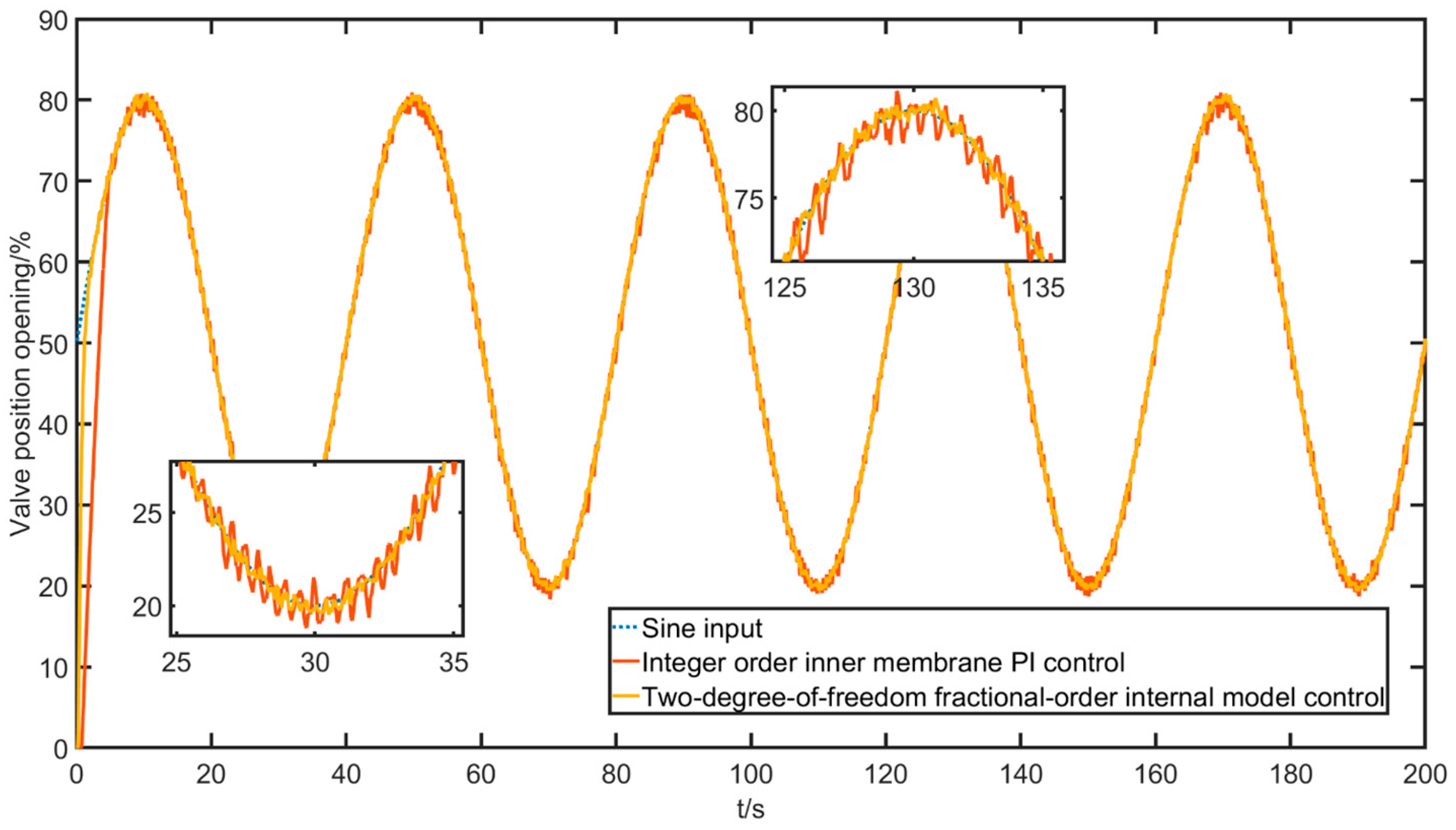
RMSE (root mean squared error) and MAPE (mean absolute percentage error) metrics are introduced here to measure the control quality. It can be seen that the two-degree-of-freedom fractional-order internal model control algorithm has significant advantages in terms of overshoot and speed. Then, a sinusoidal signal input experiment is conducted to test the dynamic performance and following characteristics of the control algorithm, given a desired valve opening signal with the shape
. The experimental results are shown in
Figure 26,
Figure 27 and
Figure 28.
The deviation indicators are shown in
Table 8.
The sine wave experiment also shows that the oscillation of the two-degree-of-freedom fractional internal model control is well maintained and the error is also small.
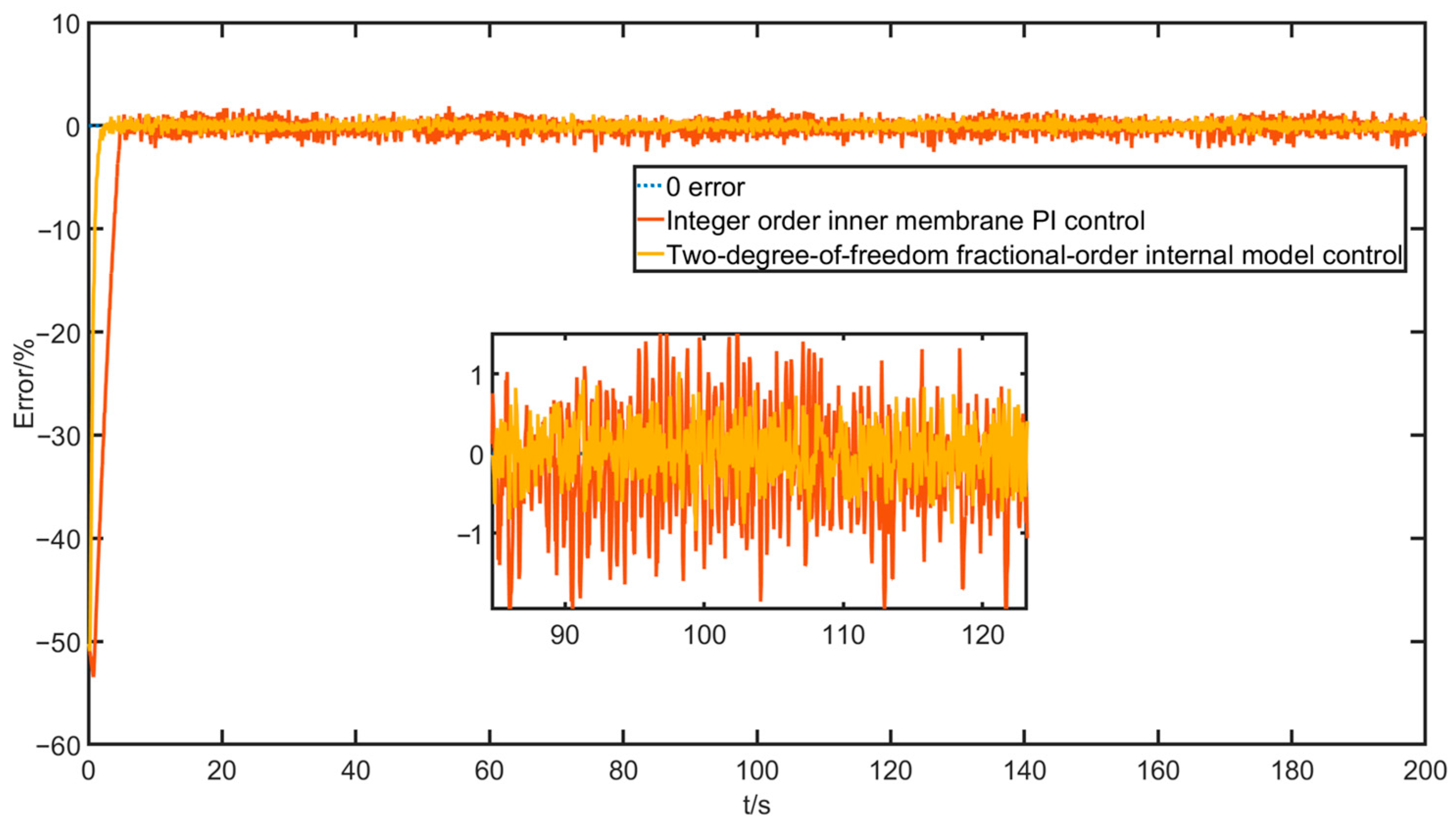
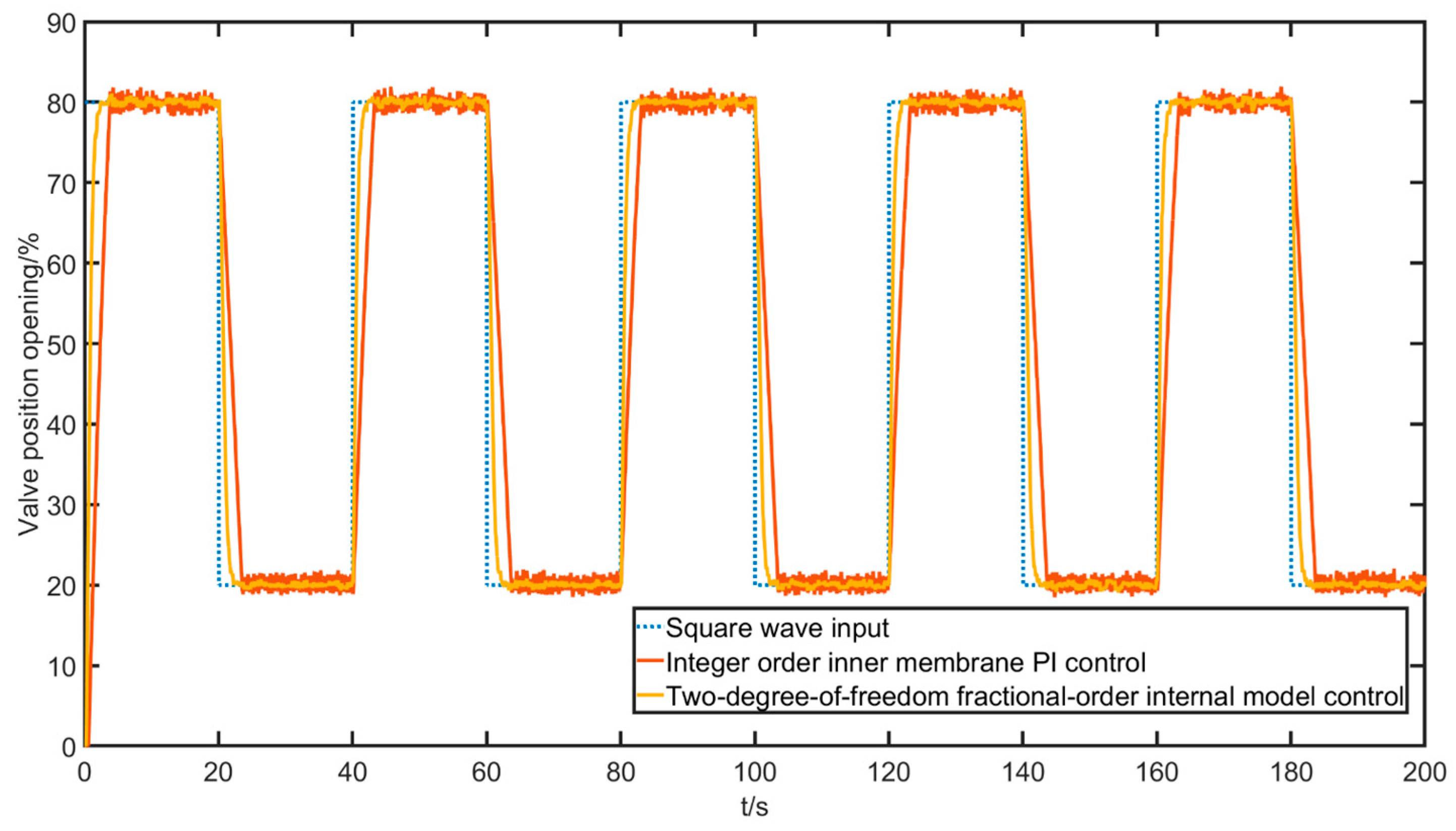
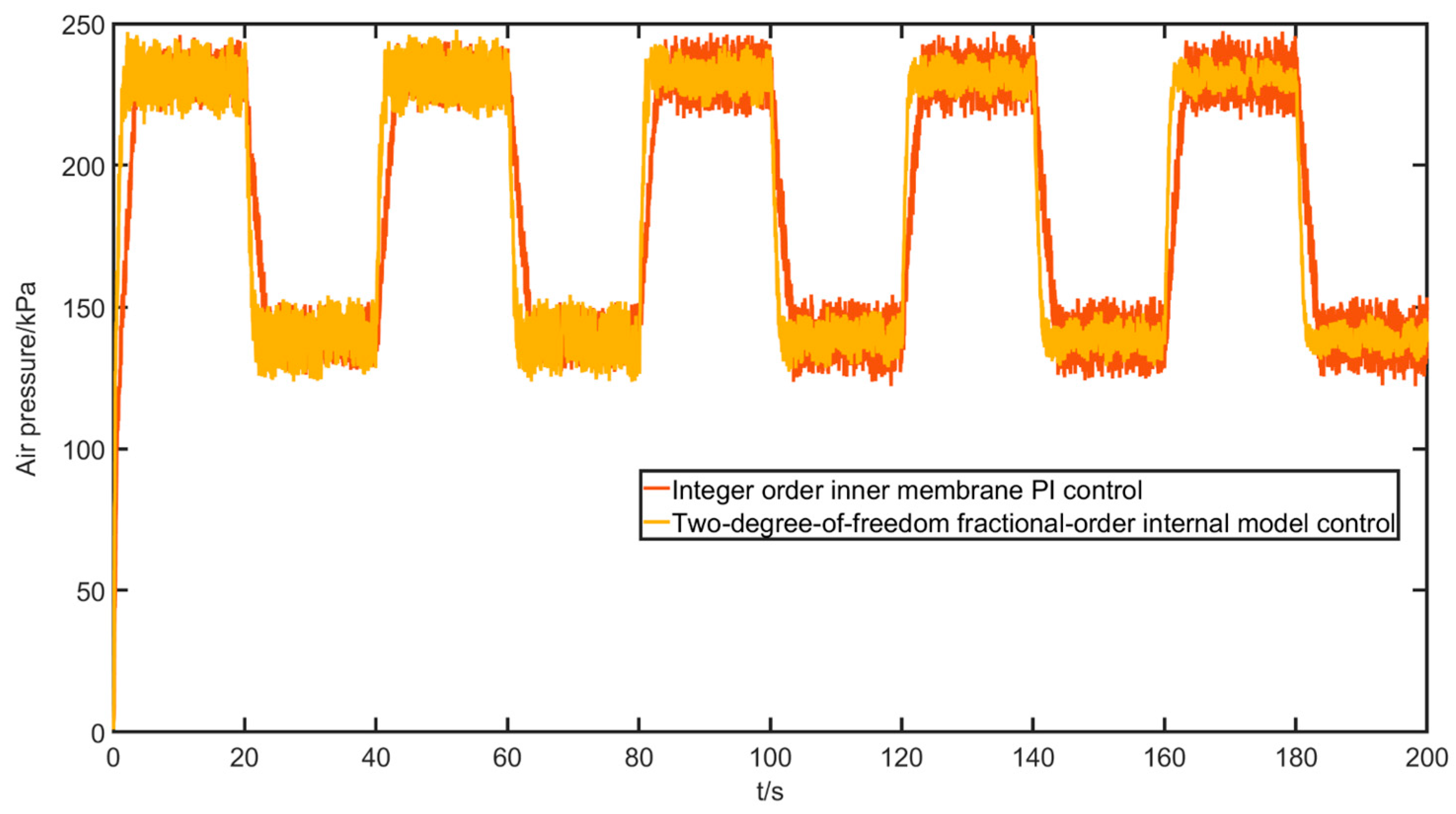
Finally, a square wave signal input experiment is conducted to test the fast dynamic performance of the control algorithm and its ability to follow the abrupt signal, given a desired valve opening signal with the shape
, and the experimental results are shown in
Figure 29,
Figure 30 and
Figure 31.
The deviation indicators are shown in
Table 9.
According to the comparison of the data and indexes in the above figures and tables, it can be seen that the two-degree-of-freedom fractional-order internal mode control algorithm has a faster response, higher control accuracy, better tracking, and better response to abruptly changing signals than the integer-order internal mode PI control, i.e., the overall control quality is better.


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}