
Dynamic Model of a Novel Planar Cable Driven Parallel Robot with a Single Cable Loop

 , , , , , and
, , , , , and
Abstract
1. Introduction
- If and , it results in an incompletely restrained positioning mechanism or an underconstrained CDPR. Such CDPRs can only attain equilibrium with gravity or a specified force and are often incapable of functioning with arbitrary external wrenches.
- When , it indicates a kinematically fully constrained CDPR. The robot is entirely restricted in terms of kinematics, but the equilibrium equation remains contingent on gravity or other forces, signifying that the robot can solely operate with a predetermined set of forces.
- If , it refers to completely restrained positioning mechanisms or fully constrained CDPRs. The end-effector positions can be entirely ascertained through the cables. The constraints on the end-effector movements and the wrenches applied to the end-effector hinge on the cable tension limits.
- When , it denotes redundantly restrained positioning mechanisms or over constrained CDPRs. The robot is restricted by redundancy, and the wrenches must be distributed via cables. The number of kinematic constraints exceeds the number of DOFs, thus the static equilibrium of the CDPR can have multiple solutions.
2. System Description
2.1. Workspace Limitations
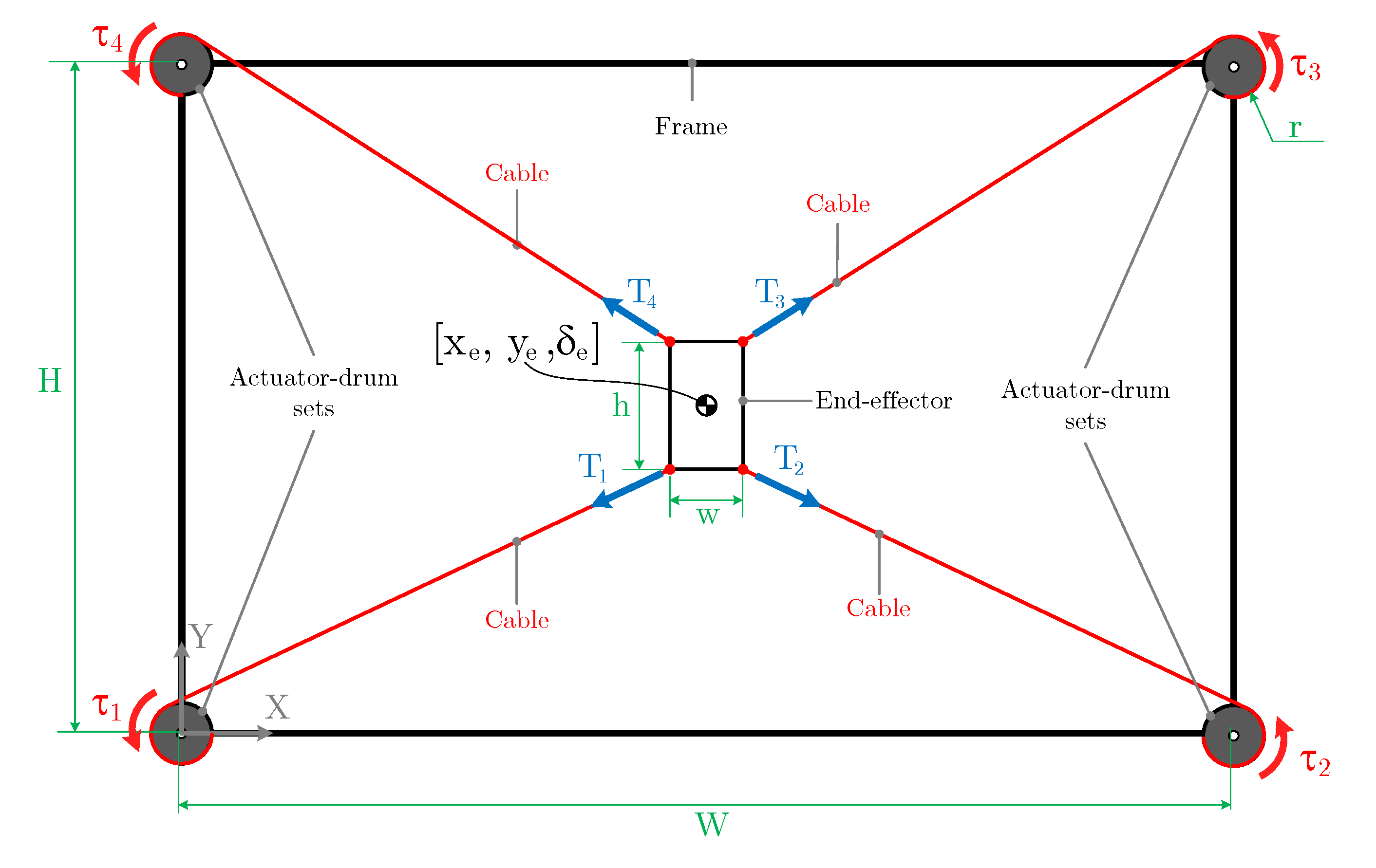
- H and W are the height and width of the frame, respectively.
- h and w are the height and width of the end-effector, respectively.
- for the tension of the cables.
- for the torques exerted by each motor.
- r the effective radius of the drums.
- the coordinates of the end-effector.
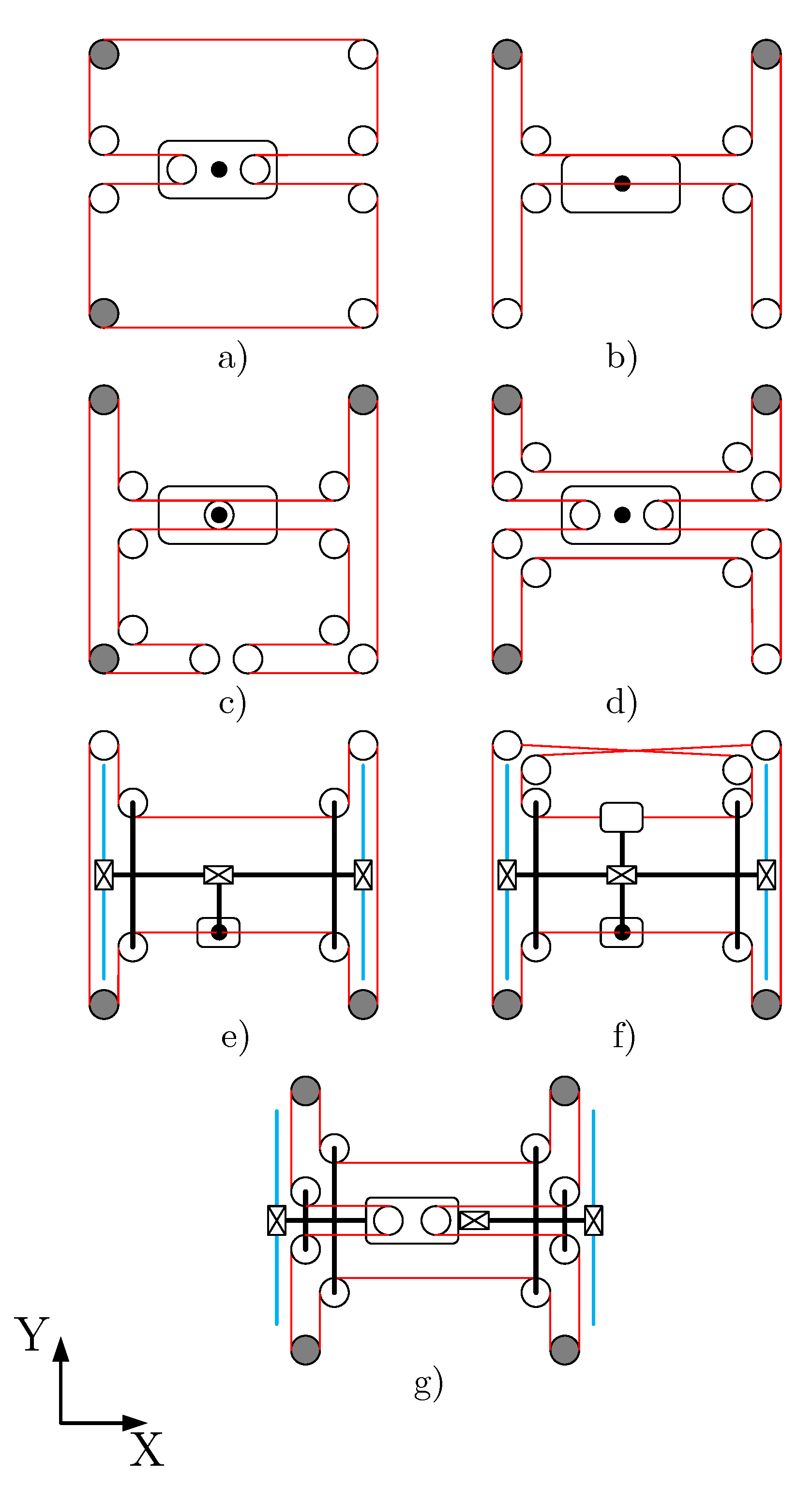
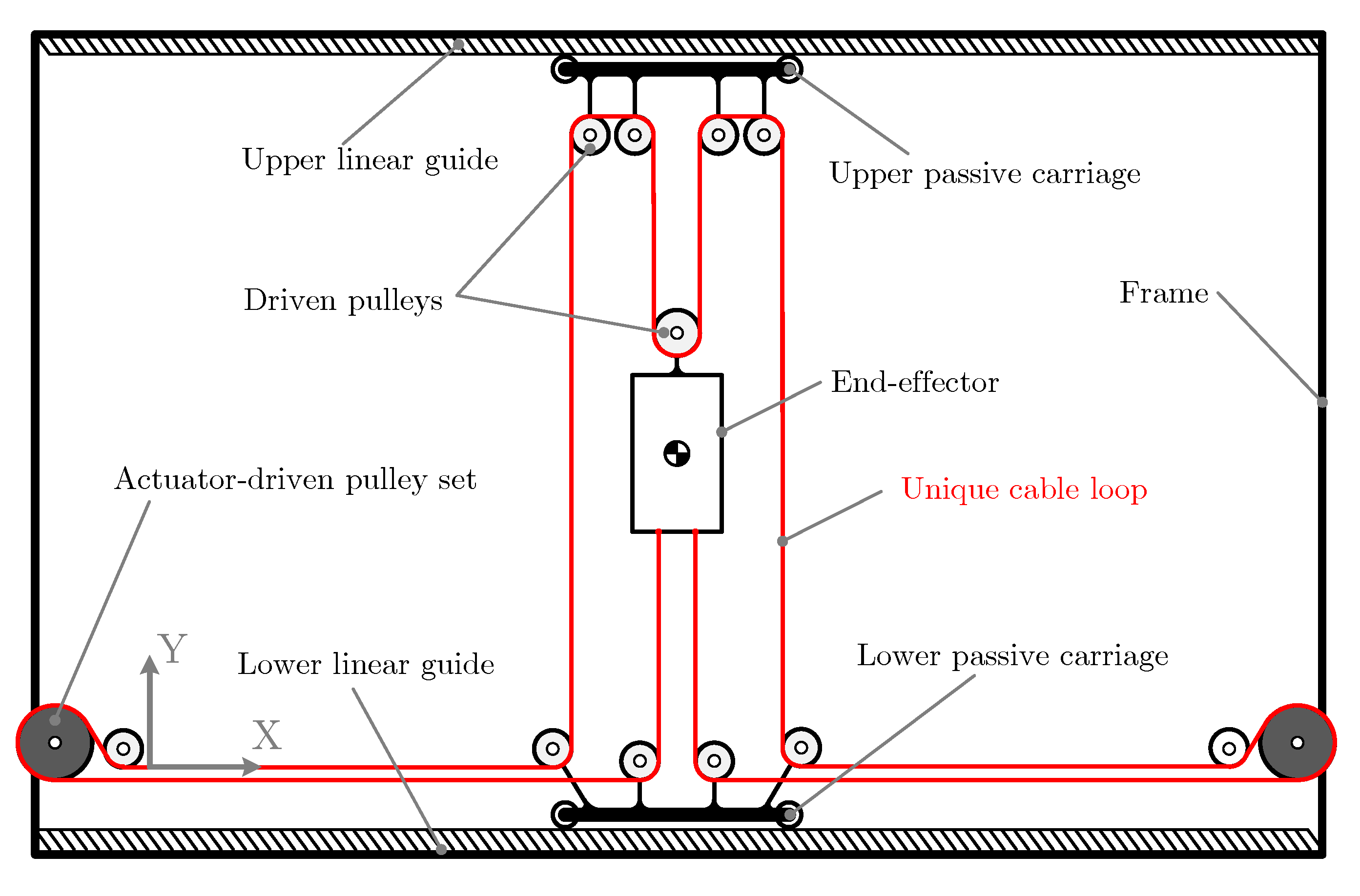
2.2. Novel Single Cable Loop CDPR
2.3. Nomenclature
2.4. Workspace Gain
3. Mathematical Model
3.1. Kinematic Model
3.2. Dynamic Model
4. Experimental Platform Description
4.1. Robot Description
4.2. Computer Vision System
5. Model Identification and Validation
5.1. Parameters Identification
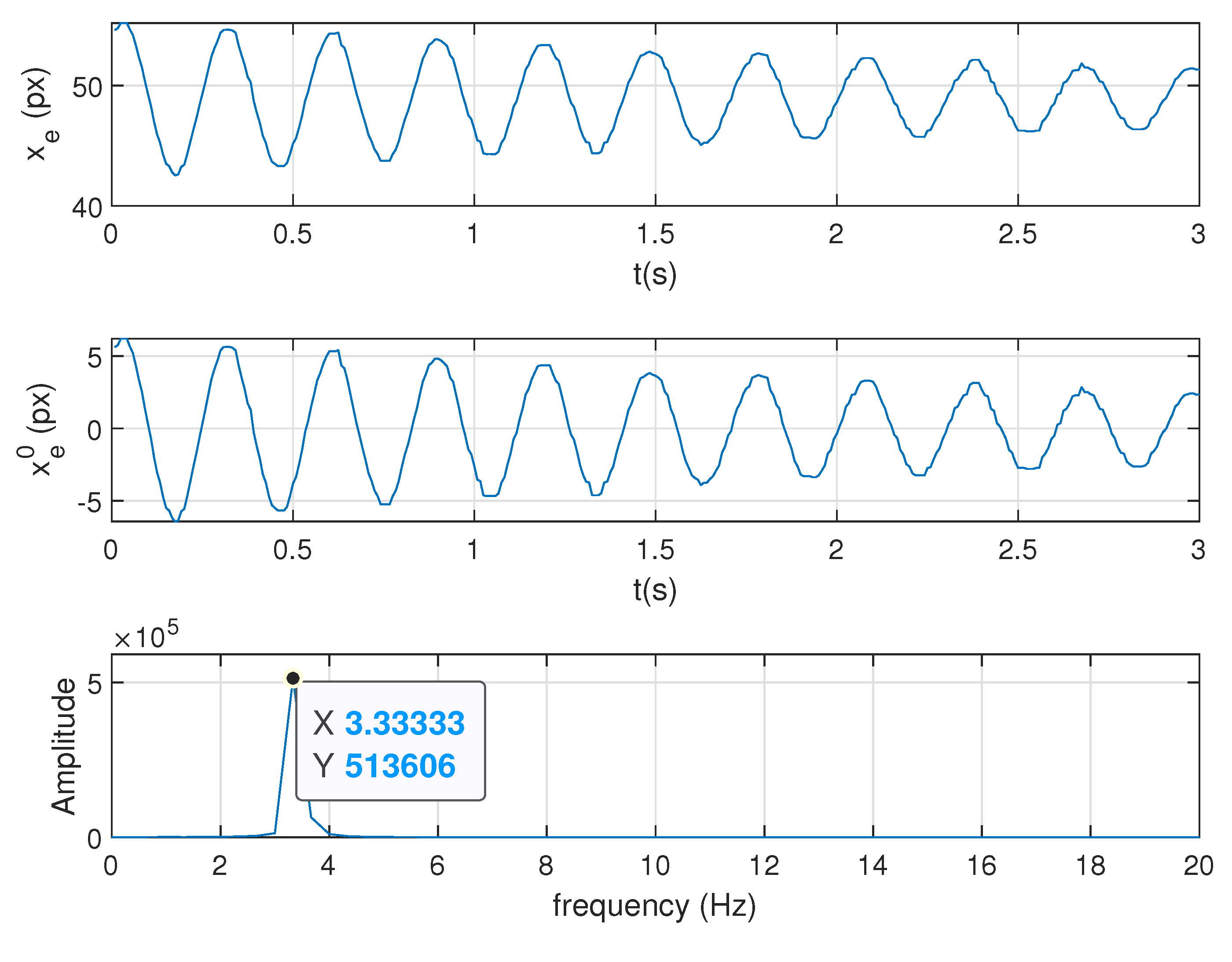
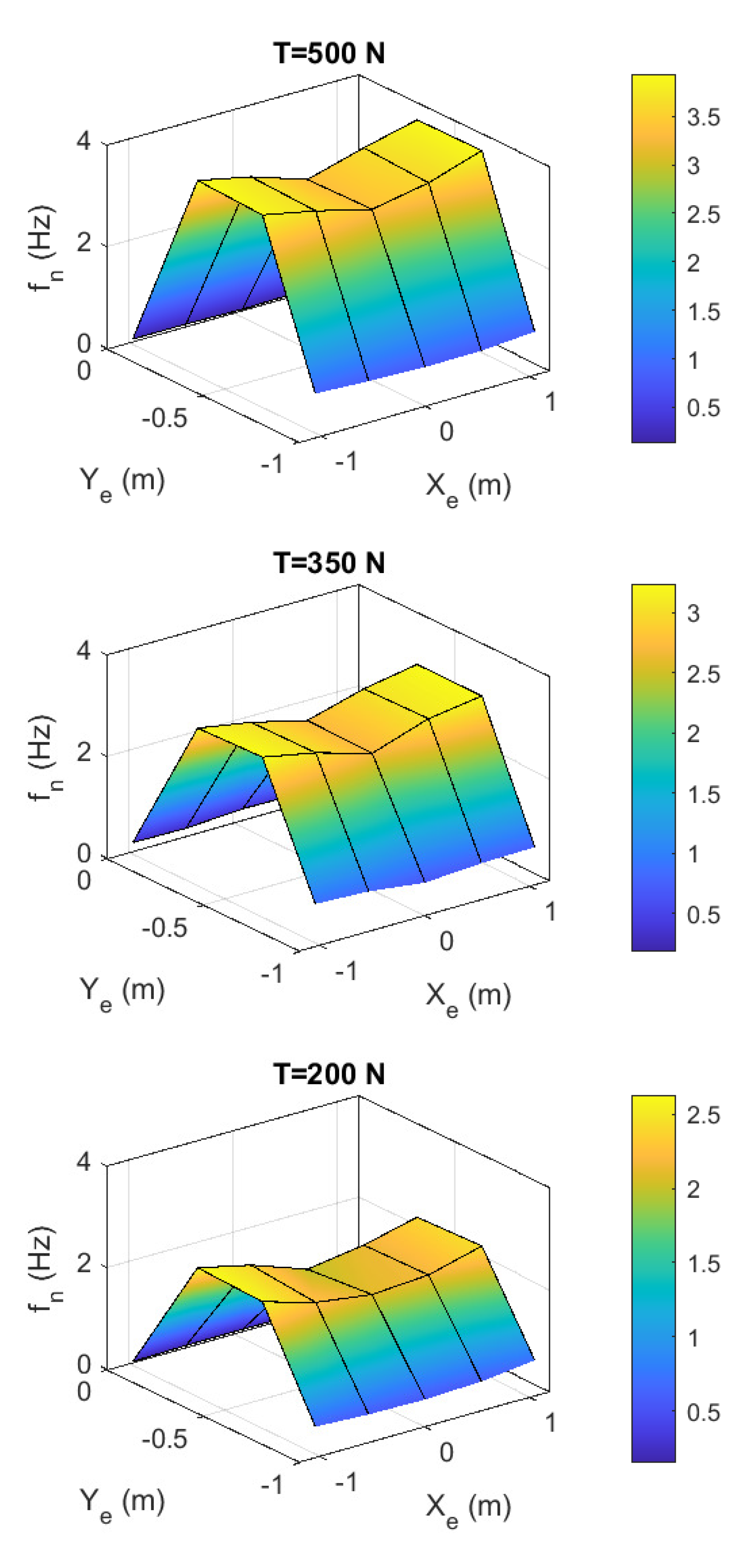
5.2. Frequency Characterisation
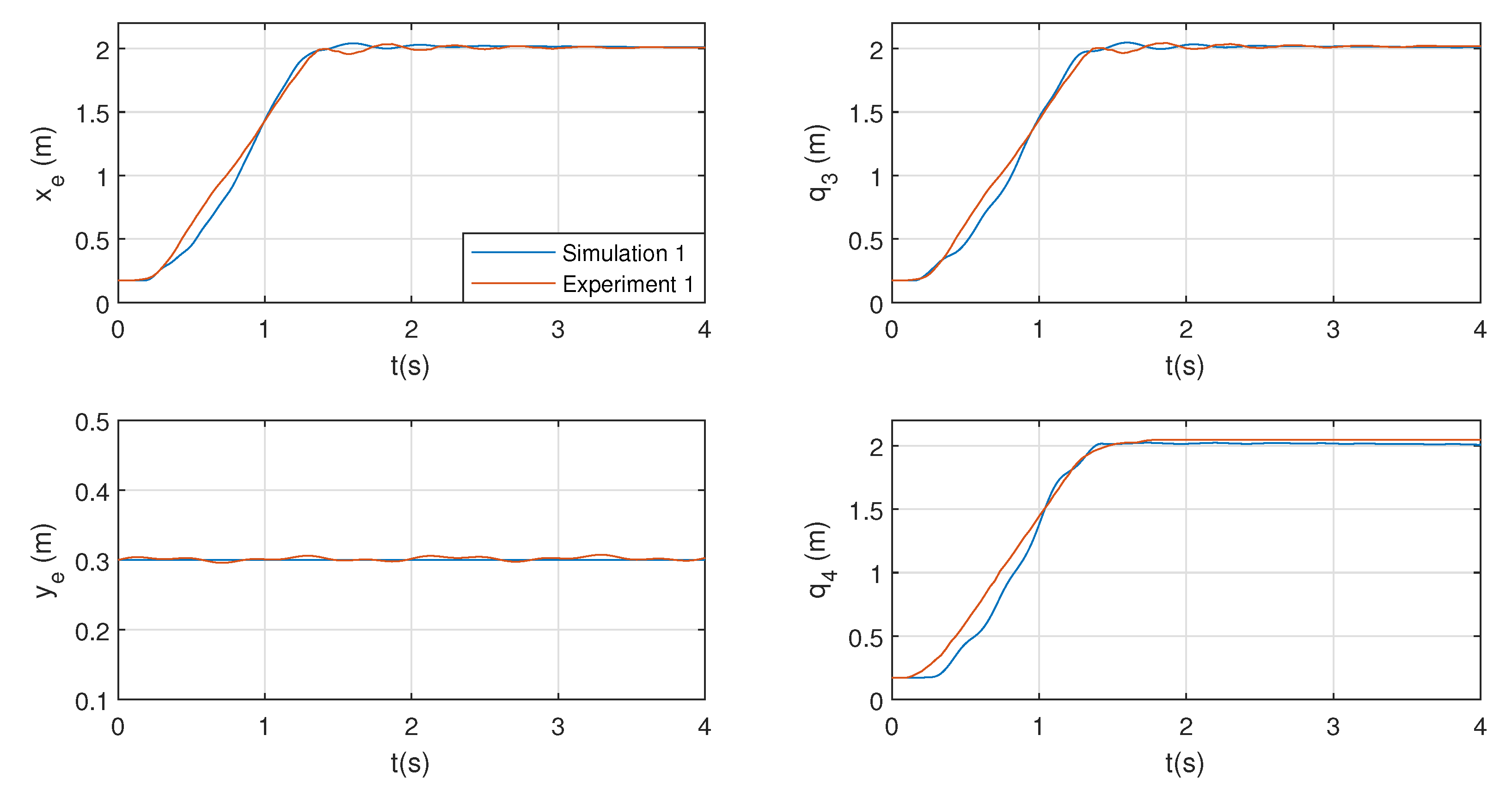
5.3. Model Validation
6. Kinematic Control
6.1. Control Scheme
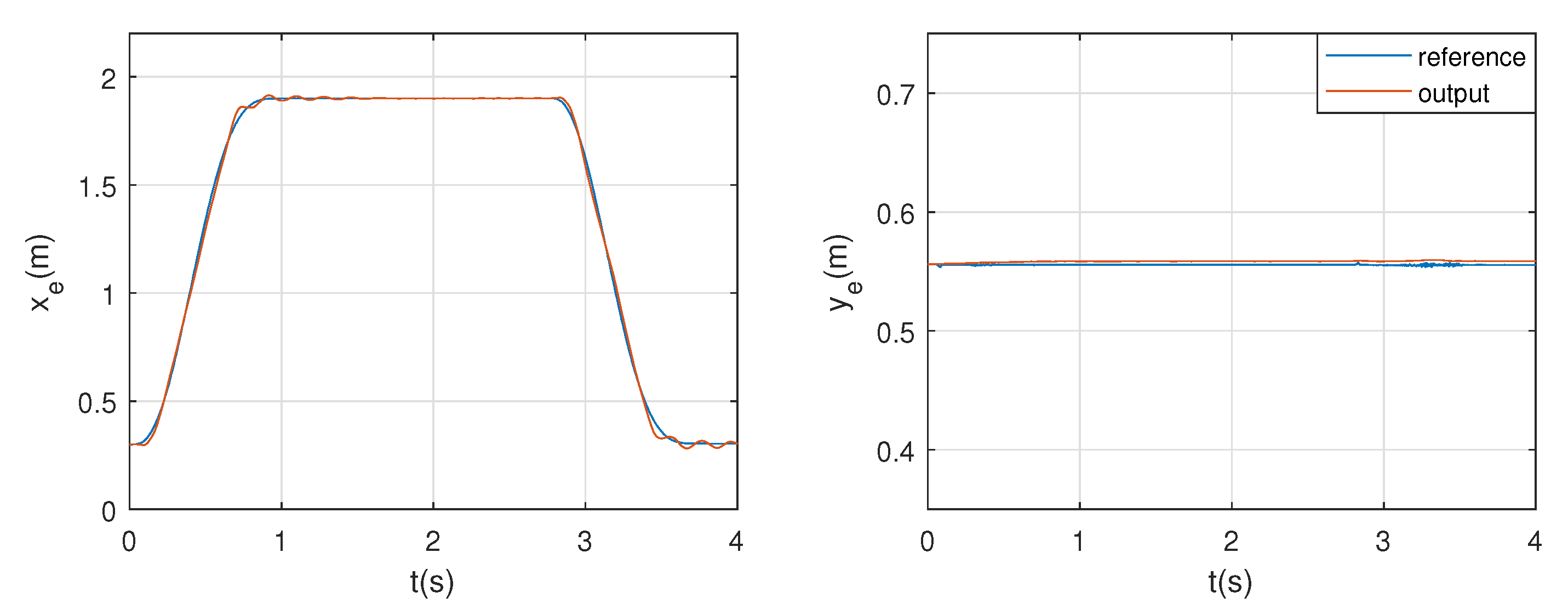
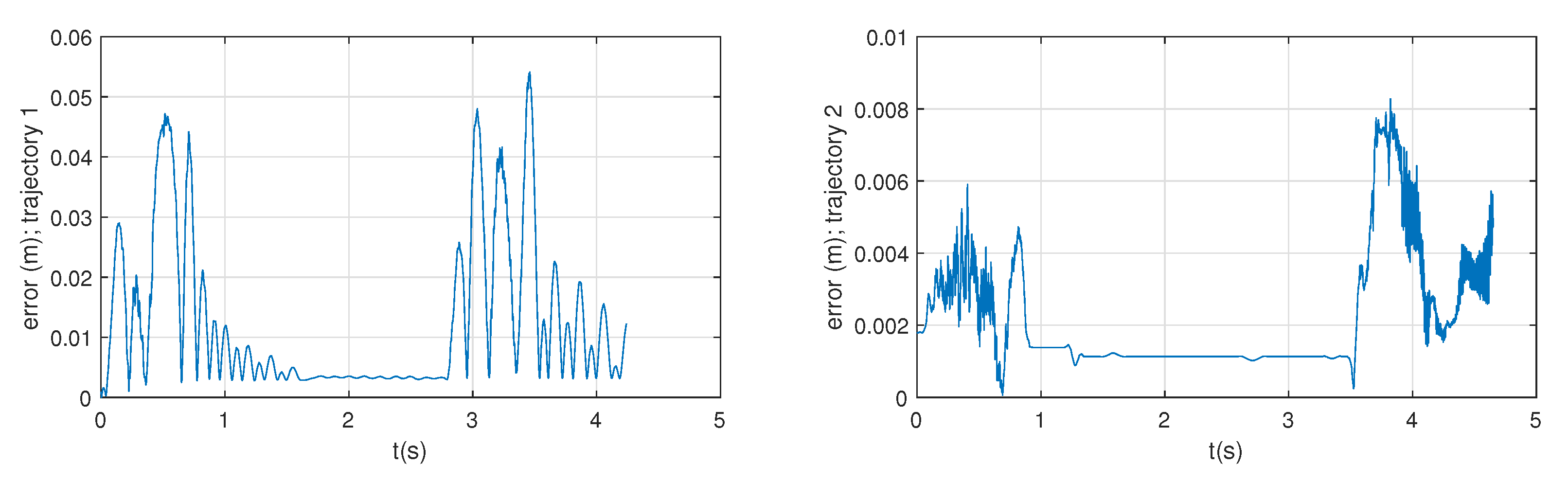
6.2. Position Control Results
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CDPR | Cable-Driven Parallel Robot |
| sCDPR | Single Cable Cable-Driven Parallel Robot |
| DOF | Degree-of-freedom |
| WFW | Wrench-feasible workspace |
| FFT | Fast Fourier Transform |
| PD | Proportional-Derivative |
Appendix A. Determination of the Cables Angles

References
- Gouttefarde, M.; Bruckmann, T. Cable-Driven Parallel Robots. In Encyclopedia of Robotics; Springer: Berlin/Heidelberg, Germany, 2022; pp. 1–14. [Google Scholar]
- Verhoeven, R. Analysis of the Workspace of Tendon Based Stewart Platforms. Ph.D. Thesis, University of Duisburg, Essen, Germany, 2006. [Google Scholar]
- Tho, T.P.; Thinh, N.T. An Overview of Cable-Driven Parallel Robots: Workspace, Tension Distribution, and Cable Sagging. Math. Probl. Eng. 2022, 2022, 2199748. [Google Scholar] [CrossRef]
- Zi, B.; Duan, B.; Du, J.; Bao, H. Dynamic modeling and active control of a cable-suspended parallel robot. Mechatronics 2008, 18, 1–12. [Google Scholar] [CrossRef]
- Pott, A. Cable-Driven Parallel Robots; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2018; Volume 1. [Google Scholar]
- Qian, S.; Zi, B.; Shang, W.W.; Xu, Q.S. A review on cable-driven parallel robots. Chin. J. Mech. Eng. 2018, 31, 66. [Google Scholar] [CrossRef]
- Ming, A. Study on multiple degree-of-freedom positioning mechanism using wires (part 1). Int. J. Jpn. Soc. Precis. Eng. 1994, 28, 131–138. [Google Scholar]
- Lv, W.; Tao, L.; Ji, Z. Sliding mode control of cable-driven redundancy parallel robot with 6 DOF based on cable-length sensor feedback. Math. Probl. Eng. 2017, 2017, 1928673. [Google Scholar] [CrossRef]
- Pott, A. On the limitations on the lower and upper tensions for cable-driven parallel robots. In Advances in Robot Kinematics; Springer: Berlin/Heidelberg, Germany, 2014; pp. 243–251. [Google Scholar]
- Gagliardini, L.; Caro, S.; Gouttefarde, M.; Girin, A. Discrete reconfiguration planning for cable-driven parallel robots. Mech. Mach. Theory 2016, 100, 313–337. [Google Scholar] [CrossRef]
- Youssef, K.; Otis, M.J.D. Reconfigurable fully constrained cable driven parallel mechanism for avoiding interference between cables. Mech. Mach. Theory 2020, 148, 103781. [Google Scholar] [CrossRef]
- An, H.; Yuan, H.; Tang, K.; Xu, W.; Wang, X. A Novel Cable-Driven Parallel Robot With Movable Anchor Points Capable for Obstacle Environments. IEEE/ASME Trans. Mechatron. 2022, 27, 5472–5483. [Google Scholar] [CrossRef]
- Tan, H.; Nurahmi, L.; Pramujati, B.; Caro, S. On the reconfiguration of cable-driven parallel robots with multiple mobile cranes. In Proceedings of the 2020 5th International Conference on Robotics and Automation Engineering (ICRAE), Singapore, 20–22 November 2020; pp. 126–130. [Google Scholar]
- Barbazza, L.; Oscari, F.; Minto, S.; Rosati, G. Trajectory planning of a suspended cable driven parallel robot with reconfigurable end effector. Robot.-Comput.-Integr. Manuf. 2017, 48, 1–11. [Google Scholar] [CrossRef]
- Rodriguez-Barroso, A.; Saltaren, R.; Portilla, G.A.; Cely, J.S.; Carpio, M. Cable-driven parallel robot with reconfigurable end effector controlled with a compliant actuator. Sensors 2018, 18, 2765. [Google Scholar] [CrossRef] [PubMed]
- Wang, R.; Li, Y. Analysis and multi-objective optimal design of a planar differentially driven cable parallel robot. Robotica 2021, 39, 2193–2209. [Google Scholar] [CrossRef]
- Duan, Q.; Vashista, V.; Agrawal, S.K. Effect on wrench-feasible workspace of cable-driven parallel robots by adding springs. Mech. Mach. Theory 2015, 86, 201–210. [Google Scholar] [CrossRef]
- Castillo-Garcia, F.J.; Rubio-Gómez, G.; Juárez, S.; Rodríguez-Rosa, D.; Bravo, E.; Ottaviano, E.; Gonzalez-Rodriguez, A. Addition of passive-carriage for increasing workspace of cable robots: Automated inspection of surfaces of civil infrastructures. Smart Struct. Syst. Int. J. 2021, 27, 387–396. [Google Scholar]
- Martin-Parra, A.; Juarez-Perez, S.; Gonzalez-Rodriguez, A.; Gonzalez-Rodriguez, A.G.; Lopez-Diaz, A.I.; Rubio-Gomez, G. A novel design for fully constrained planar Cable-Driven Parallel Robots to increase their wrench-feasible workspace. Mech. Mach. Theory 2023, 180, 105159. [Google Scholar] [CrossRef]
- Li, J.; Wang, K.; Wang, Y.; Wang, C. Motion Planning for a Cable-Driven Lower Limb Rehabilitation Robot with Movable Distal Anchor Points. J. Bionic Eng. 2023, 1–12. [Google Scholar] [CrossRef]
- Behzadipour, S. Kinematics and Dynamics of a Self-Stressed Cartesian Cable-Driven Mechanism. J. Mech. Des. 2009, 131, 061005. [Google Scholar] [CrossRef]
- Laliberte, T.; Gosselin, C.M.; Gao, D. Closed-loop transmission routings for cartesian scara-type manipulators. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Montreal, QC, Canada, 15–18 August 2010; Volume 44106, pp. 281–290. [Google Scholar]
- Gosselin, C.; Laliberté, T.; Mayer-St-Onge, B.; Foucault, S.; Lecours, A.; Duchaine, V.; Paradis, N.; Gao, D.; Menassa, R. A friendly beast of burden: A human-assistive robot for handling large payloads. IEEE Robot. Autom. Mag. 2013, 20, 139–147. [Google Scholar] [CrossRef]
- Borboni, A.; Ceretti, E.; Copeta, A.; Moscatelli, D.; Faglia, R.; Attanasio, A. High precision machine based on a differential mechanism. In Engineering Systems Design and Analysis; American Society of Mechanical Engineers: New York, NY, USA, 2014; Volume 45844, p. V002T16A001. [Google Scholar]
- Idà, E.; Nanetti, F.; Mottola, G. An Alternative Parallel Mechanism for Horizontal Positioning of a Nozzle in an FDM 3D Printer. Machines 2022, 10, 542. [Google Scholar] [CrossRef]
- Barrette, G.; Gosselin, C.M.M. Determination of the dynamic workspace of cable-driven planar parallel mechanisms. J. Mech. Des. 2005, 127, 242–248. [Google Scholar] [CrossRef]
- Williams Ii, R.L.; Gallina, P. Translational planar cable-direct-driven robots. J. Intell. Robot. Syst. 2003, 37, 69–96. [Google Scholar] [CrossRef]
- Ottaviano, E.; Arena, A.; Gattulli, V. Geometrically exact three-dimensional modeling of cable-driven parallel manipulators for end-effector positioning. Mech. Mach. Theory 2021, 155, 104102. [Google Scholar] [CrossRef]
- Yuan, H.; Courteille, E.; Deblaise, D. Static and dynamic stiffness analyses of cable-driven parallel robots with non-negligible cable mass and elasticity. Mech. Mach. Theory 2015, 85, 64–81. [Google Scholar] [CrossRef]
- Abdolshah, S.; Zanotto, D.; Rosati, G.; Agrawal, S.K. Optimizing stiffness and dexterity of planar adaptive cable-driven parallel robots. J. Mech. Robot. 2017, 9, 031004. [Google Scholar] [CrossRef]
- Fetić, A.; Jurić, D.; Osmanković, D. The procedure of a camera calibration using Camera Calibration Toolbox for MATLAB. In Proceedings of the 35th International Convention MIPRO, Opatija, Croatia, 21–25 May 2012; pp. 1752–1757. [Google Scholar]
- Tang, J.; Zhang, Y.; Huang, F.; Li, J.; Chen, Z.; Song, W.; Zhu, S.; Gu, J. Design and kinematic control of the cable-driven hyper-redundant manipulator for potential underwater applications. Appl. Sci. 2019, 9, 1142. [Google Scholar] [CrossRef]
- Wu, W. DC motor identification using speed step responses. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 1937–1941. [Google Scholar]
- Ogata, K. Modern Control Engineering; Prentice Hall: Upper Saddle River, NJ, USA, 2010; Volume 5. [Google Scholar]
- Feliu-Batlle, V.; Castillo-García, F.J. On the robust control of stable minimum phase plants with large uncertainty in a time constant. A fractional-order control approach. Automatica 2014, 50, 218–224. [Google Scholar] [CrossRef]
- Rubio-Gómez, G.; Juárez-Pérez, S.; Gonzalez-Rodríguez, A.; Rodríguez-Rosa, D.; Corral-Gómez, L.; López-Díaz, A.I.; Payo, I.; Castillo-García, F.J. New sensor device to accurately measure cable tension in cable-driven parallel robots. Sensors 2021, 21, 3604. [Google Scholar] [CrossRef] [PubMed]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frame | |
|---|---|
| Width, W (mm) | 2224 |
| Height, H (mm) | 1112 |
| End-effector | |
| Width, w (mm) | 287 |
| Height, h (mm) | 281 |
| Mass, (kg) | 2.1 |
| Rotational Inertia, (kg · m ) | 2.5198 · |
| Cable | |
| Diameter, d (mm) | 2 |
| Young’s module, E (GPa) | 2.0912 |
| Passive Carriages | |
| Width, (mm) | 287 |
| Mass, (kg) | 1.2 |
| Motor/Pulley sets | |
| Rotational Inertia, J (kg · m ) | |
| Viscous friction coefficient, b (Nms) | 0.2 |
| Effective radius, r (mm) | 7.3 |
| Experiment | End-Effector Position | Input Torques |
|---|---|---|
| m | Nm | |
| 1 | ||
| 2 | ||
| 3 | ||
| 4 |
| Trajectory | Initial Pose | Intermediate Pose | Final Pose | Trajectory Time |
|---|---|---|---|---|
| m | (s) | |||
| Horizontal | 4 | |||
| Vertical | 4.5 | |||
| Diagonal | 2.5 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
González-Rodríguez, A.; Martín-Parra, A.; Juárez-Pérez, S.; Rodríguez-Rosa, D.; Moya-Fernández, F.; Castillo-García, F.J.; Rosado-Linares, J. Dynamic Model of a Novel Planar Cable Driven Parallel Robot with a Single Cable Loop. Actuators 2023, 12, 200. https://doi.org/10.3390/act12050200
González-Rodríguez A, Martín-Parra A, Juárez-Pérez S, Rodríguez-Rosa D, Moya-Fernández F, Castillo-García FJ, Rosado-Linares J. Dynamic Model of a Novel Planar Cable Driven Parallel Robot with a Single Cable Loop. Actuators. 2023; 12(5):200. https://doi.org/10.3390/act12050200
Chicago/Turabian StyleGonzález-Rodríguez, Antonio, Andrea Martín-Parra, Sergio Juárez-Pérez, David Rodríguez-Rosa, Francisco Moya-Fernández, Fernando J. Castillo-García, and Jesús Rosado-Linares. 2023. "Dynamic Model of a Novel Planar Cable Driven Parallel Robot with a Single Cable Loop" Actuators 12, no. 5: 200. https://doi.org/10.3390/act12050200
APA StyleGonzález-Rodríguez, A., Martín-Parra, A., Juárez-Pérez, S., Rodríguez-Rosa, D., Moya-Fernández, F., Castillo-García, F. J., & Rosado-Linares, J. (2023). Dynamic Model of a Novel Planar Cable Driven Parallel Robot with a Single Cable Loop. Actuators, 12(5), 200. https://doi.org/10.3390/act12050200