

Simulation Study on Direct-Drive Compressor with Electromagnetic Linear Actuator


Abstract
:1. Introduction
- (1)
- Good refrigeration performance to ensure good refrigeration effect under different working conditions.
- (2)
- Greater mechanical efficiency on the basis of an existing compressor to meet the requirements of energy conservation and environmental protection.
- (3)
- Compact structure, small size, and low weight, so that installation and fixture in the limited space of the engine room are possible.
- (4)
- The compressor should run smoothly, especially in the working conditions of startup and stop, to reduce noise and vibration.
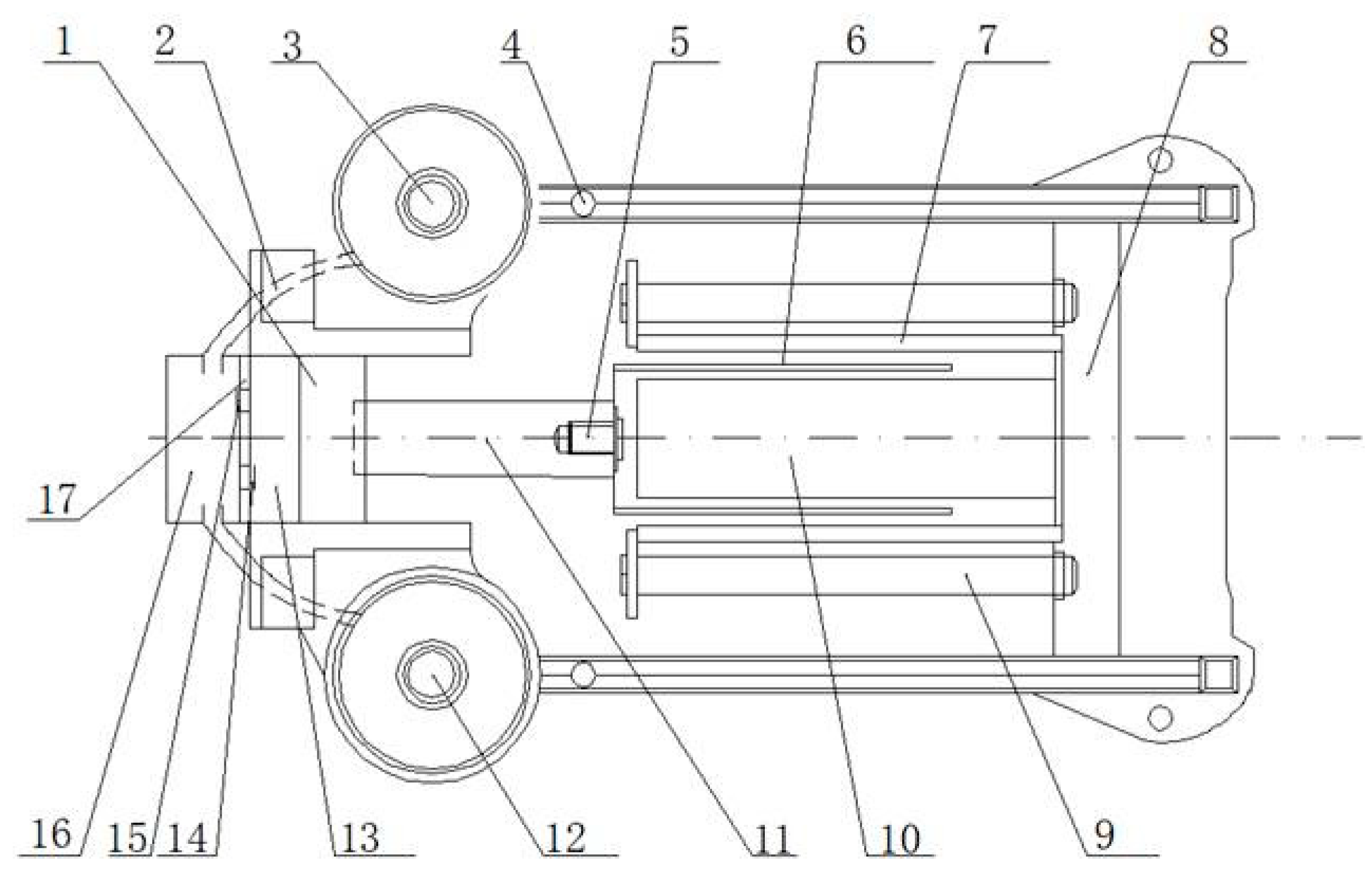
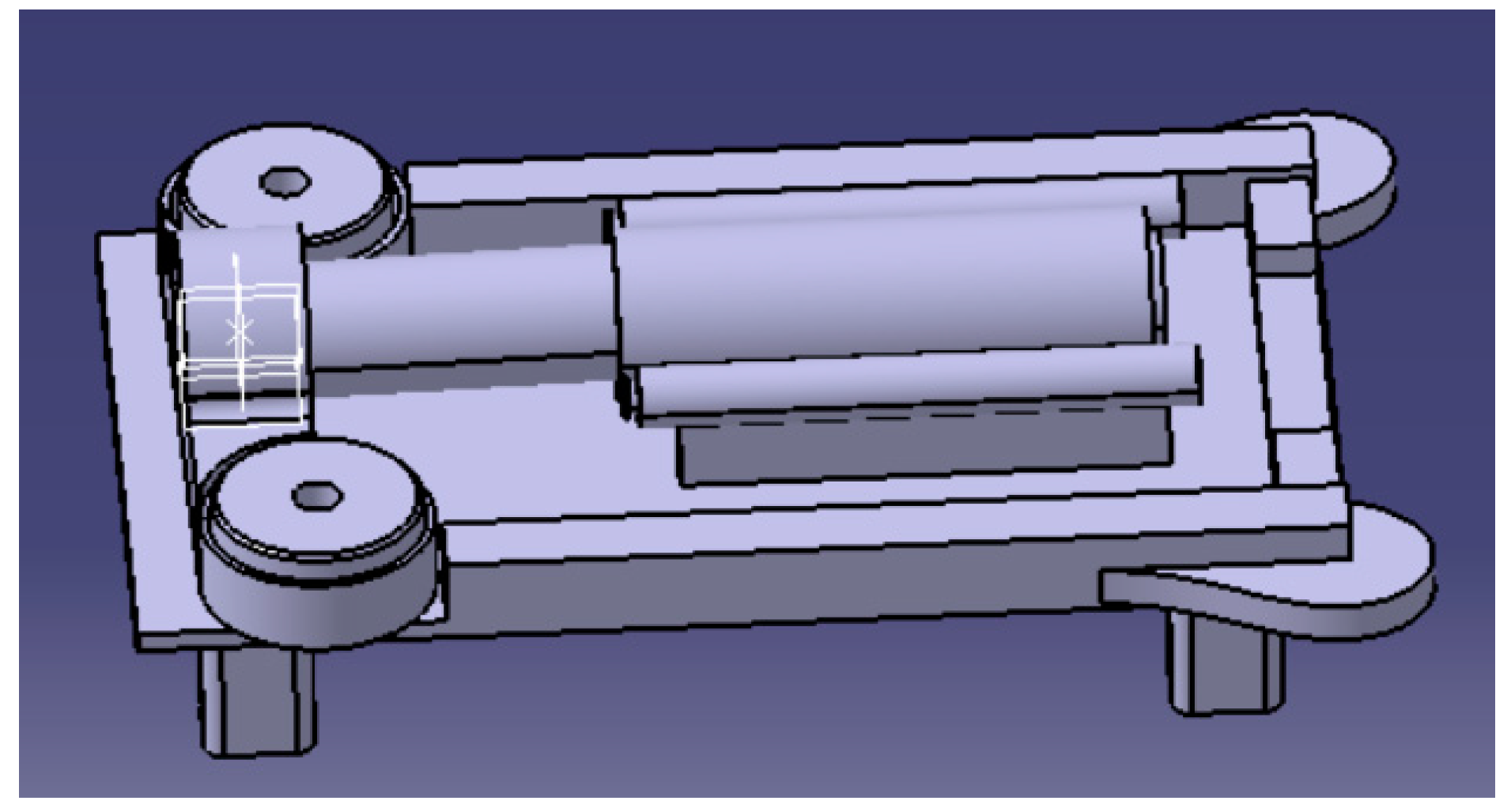
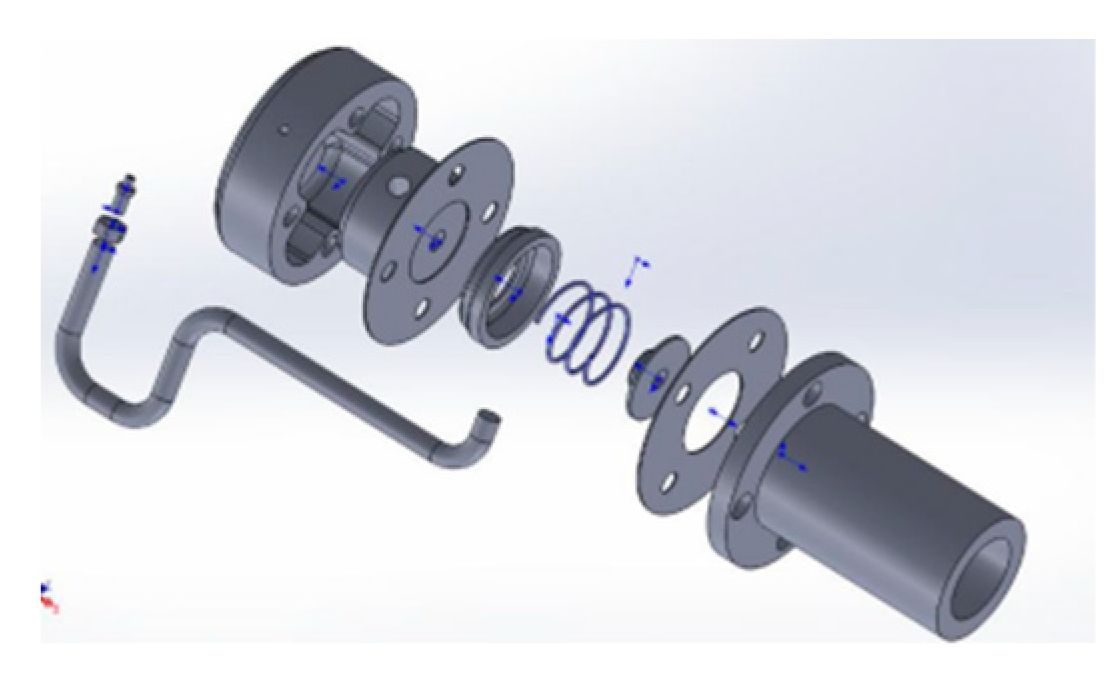
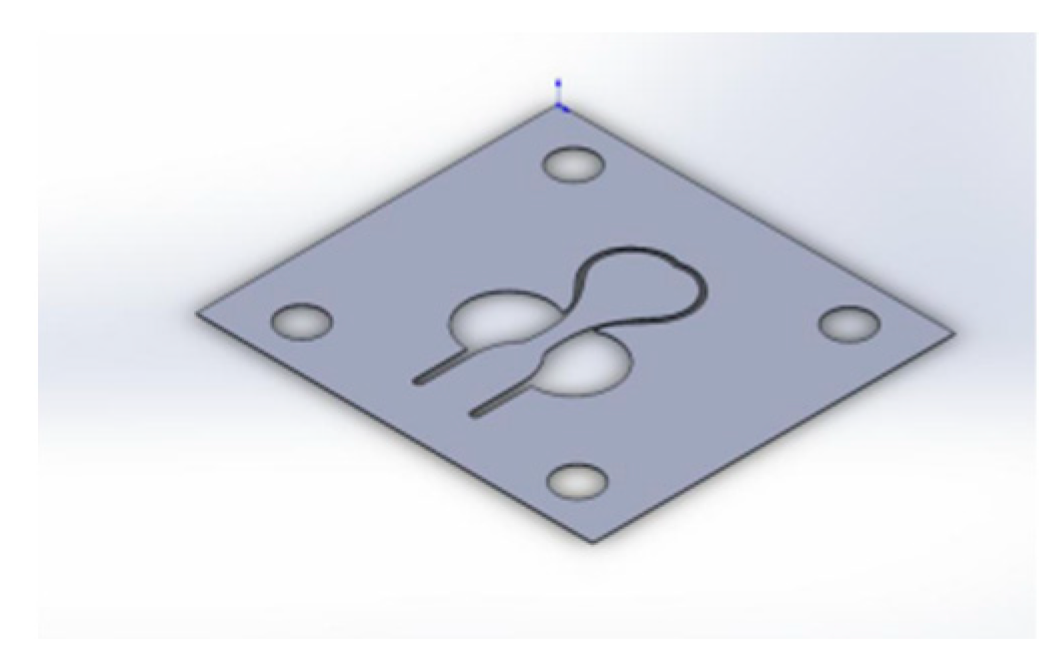
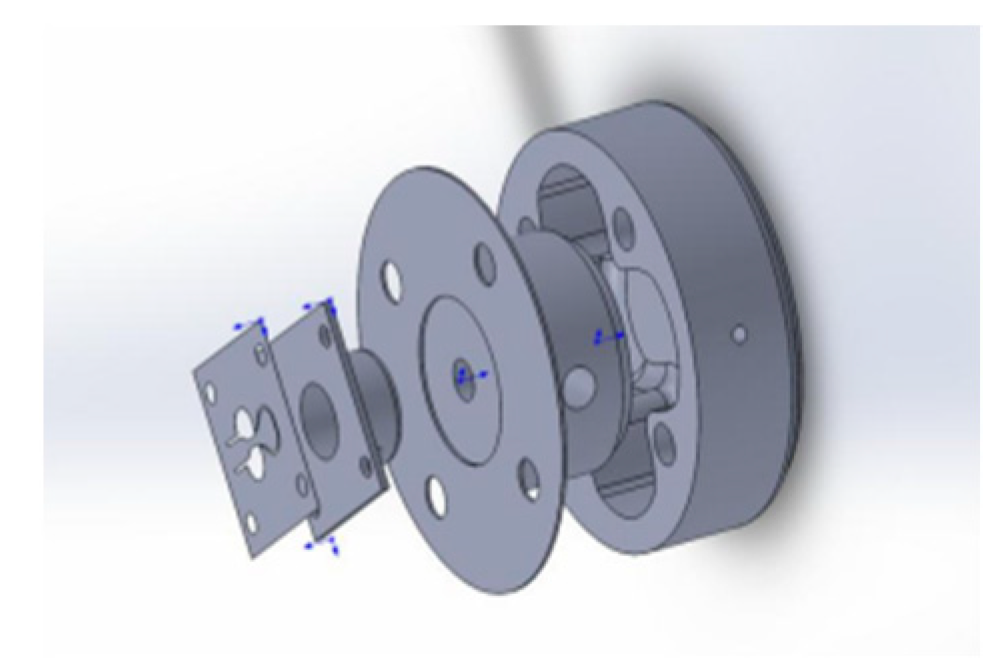
2. Structure of Direct-Drive Compressor with Electromagnetic Linear Actuator
3. Modeling of Direct-Drive Compressor with Electromagnetic Linear Actuator
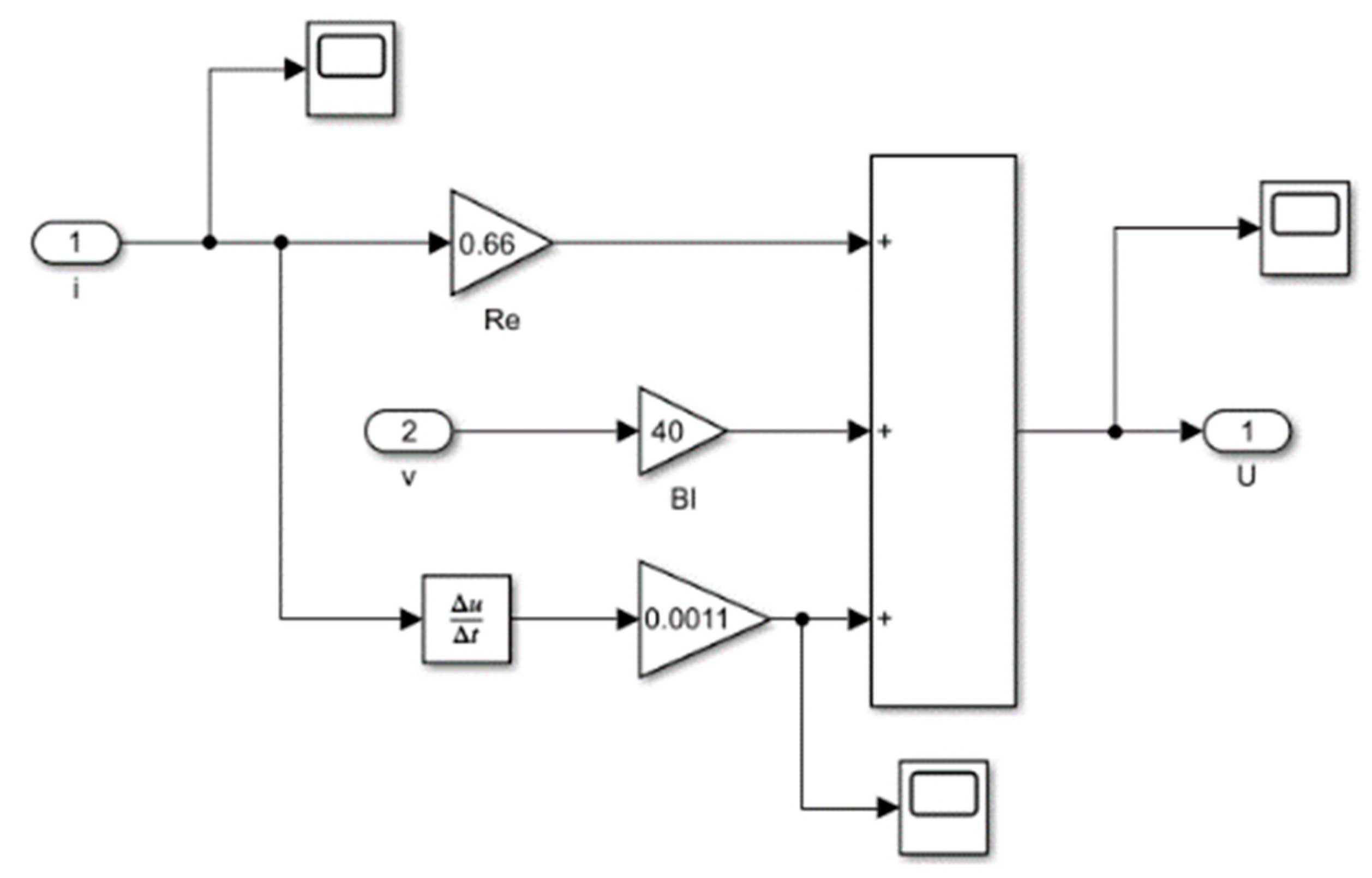
3.1. Mathematical Model of the Moving-Coil Linear Motor
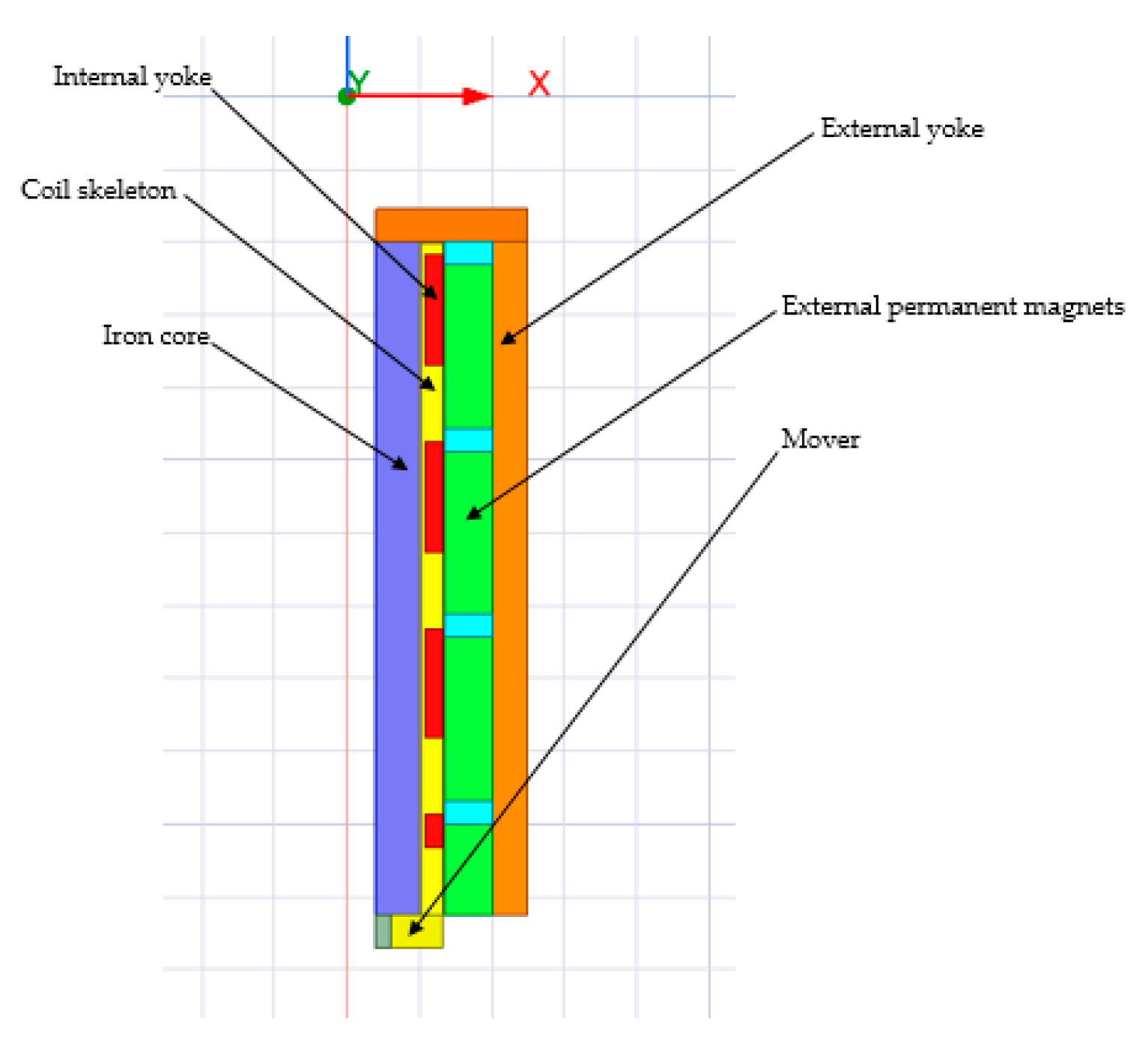
3.2. Parameter Design and Material Selection of the Moving-Coil Linear Motor
- (1)
- The driving force and the working stroke of the linear motor should be increased within the limited installation range;
- (2)
- The thrust performance of the linear motor should be increased to reduce fluctuation during motor operation;
- (3)
- The electromagnetic density and the magnetic circuit should be properly designed to reduce temperature rise during motor operation;
- (4)
- The mechanical efficiency and energy utilization efficiency of the motor should be increased to reduce the working energy consumption as much as possible;
- (5)
- It is necessary to meet the requirements of small size, compact structure, reliable operation, and high space utilization rate.
3.3. Mathematical Model of the Moving-Coil Linear Compressor
4. Results
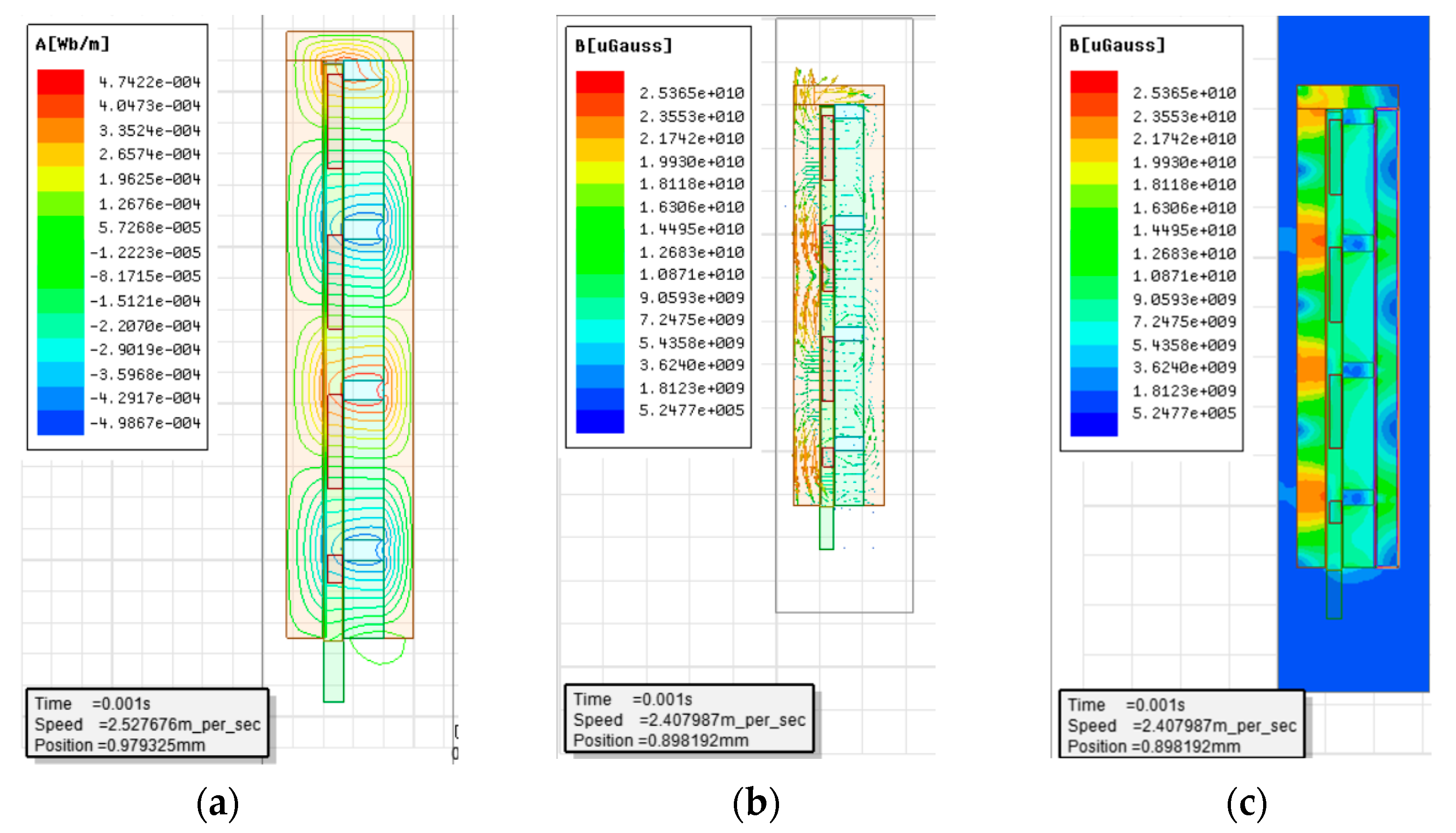
4.1. Simulation Analysis of the Moving-Coil Linear Motor under Maxwell
4.2. Dynamic Simulation and Analysis of the Moving-Coil Linear Compressor under Simulink
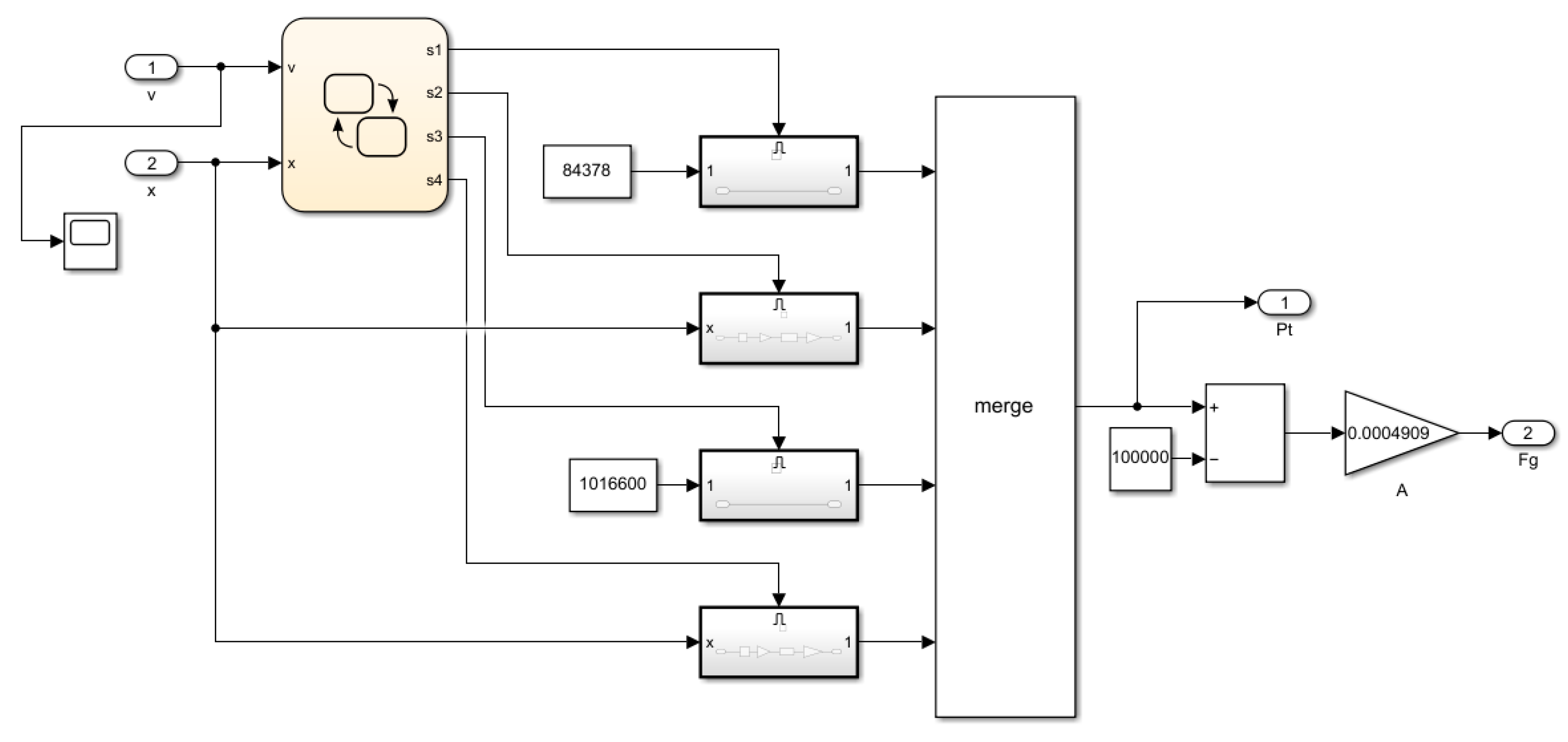
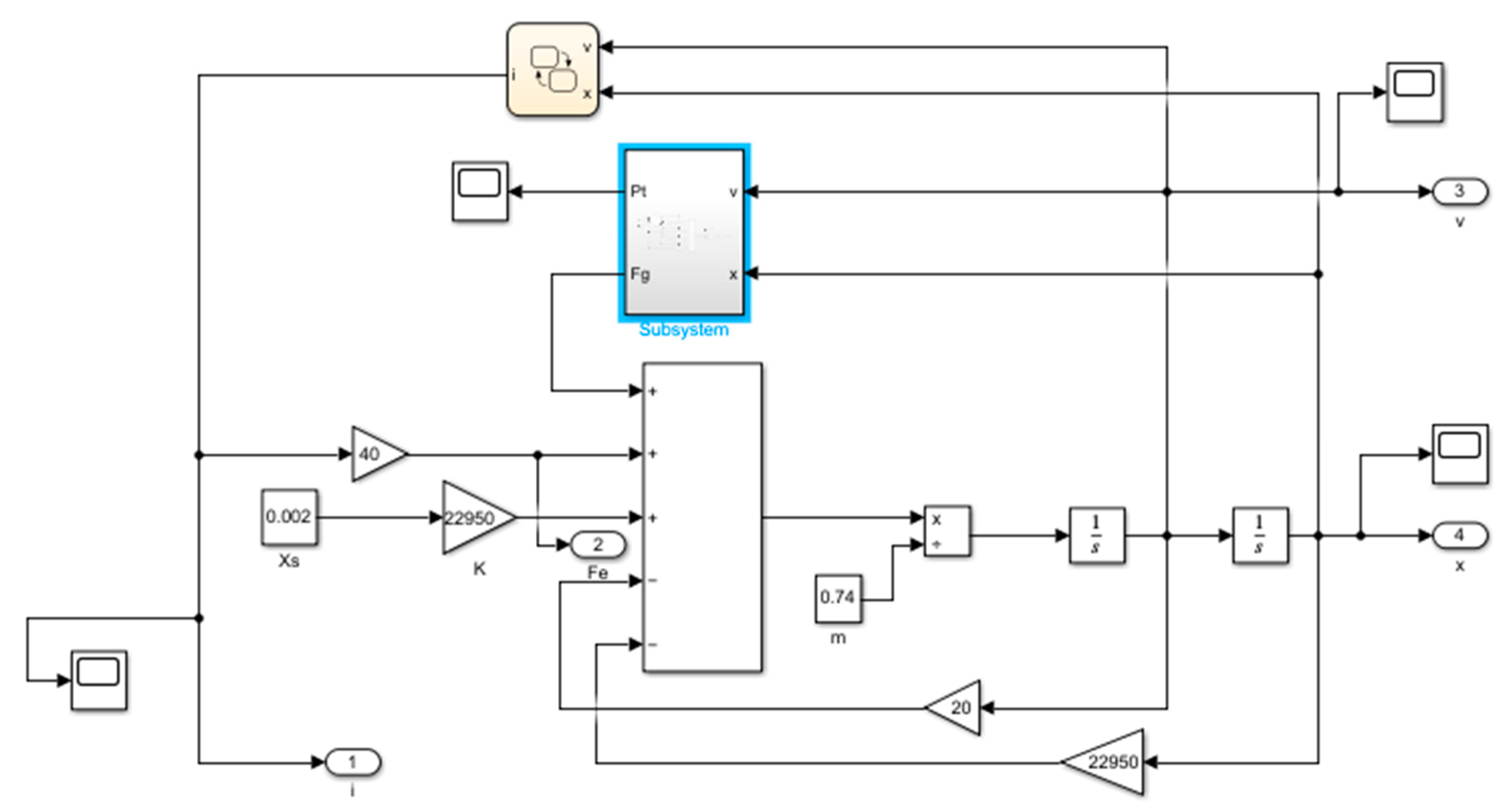
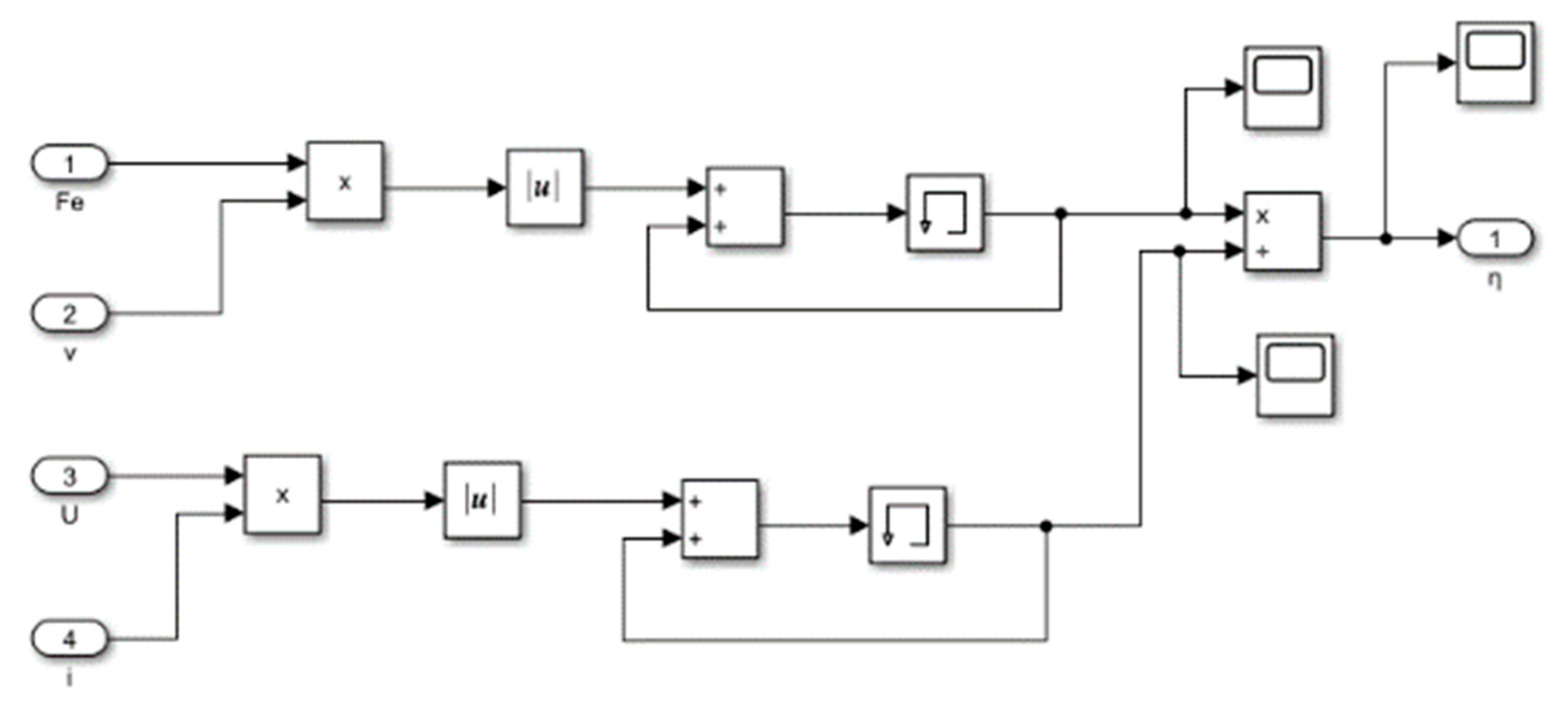
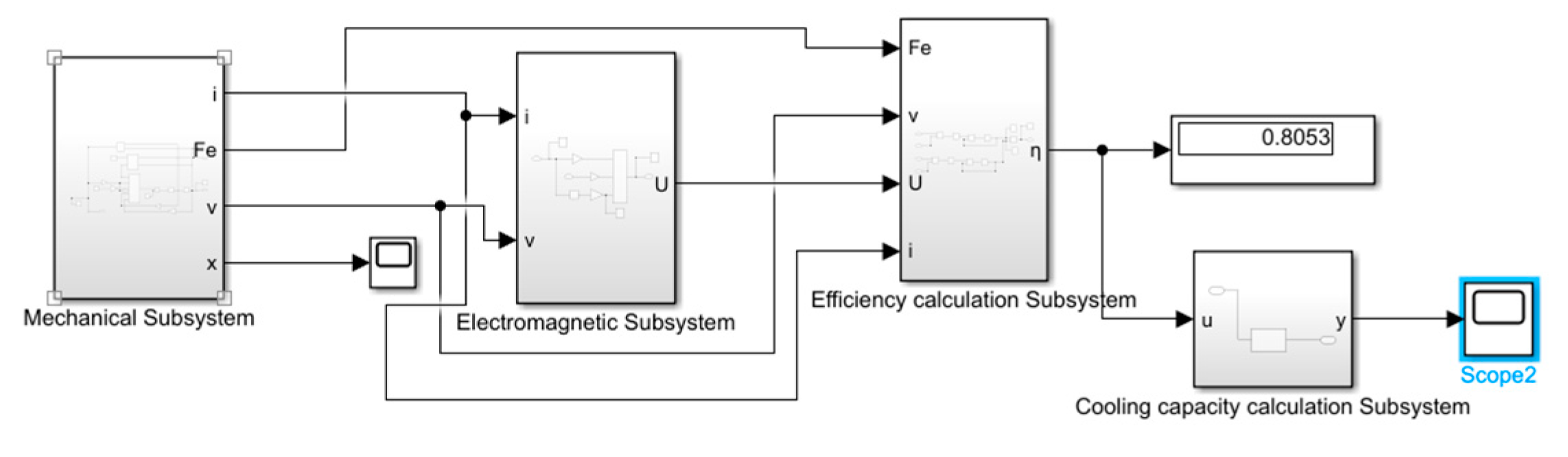
4.2.1. Dynamic Modeling Simulation
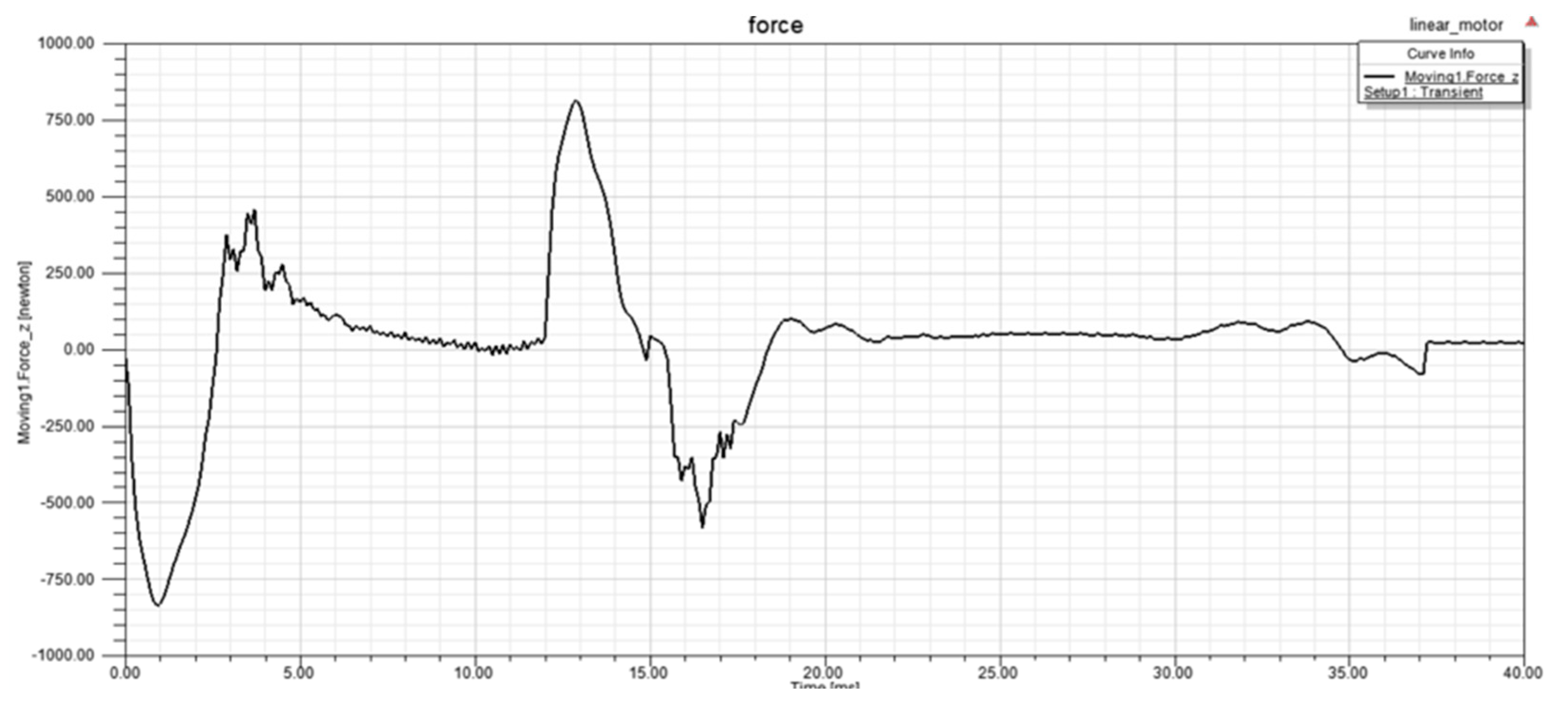
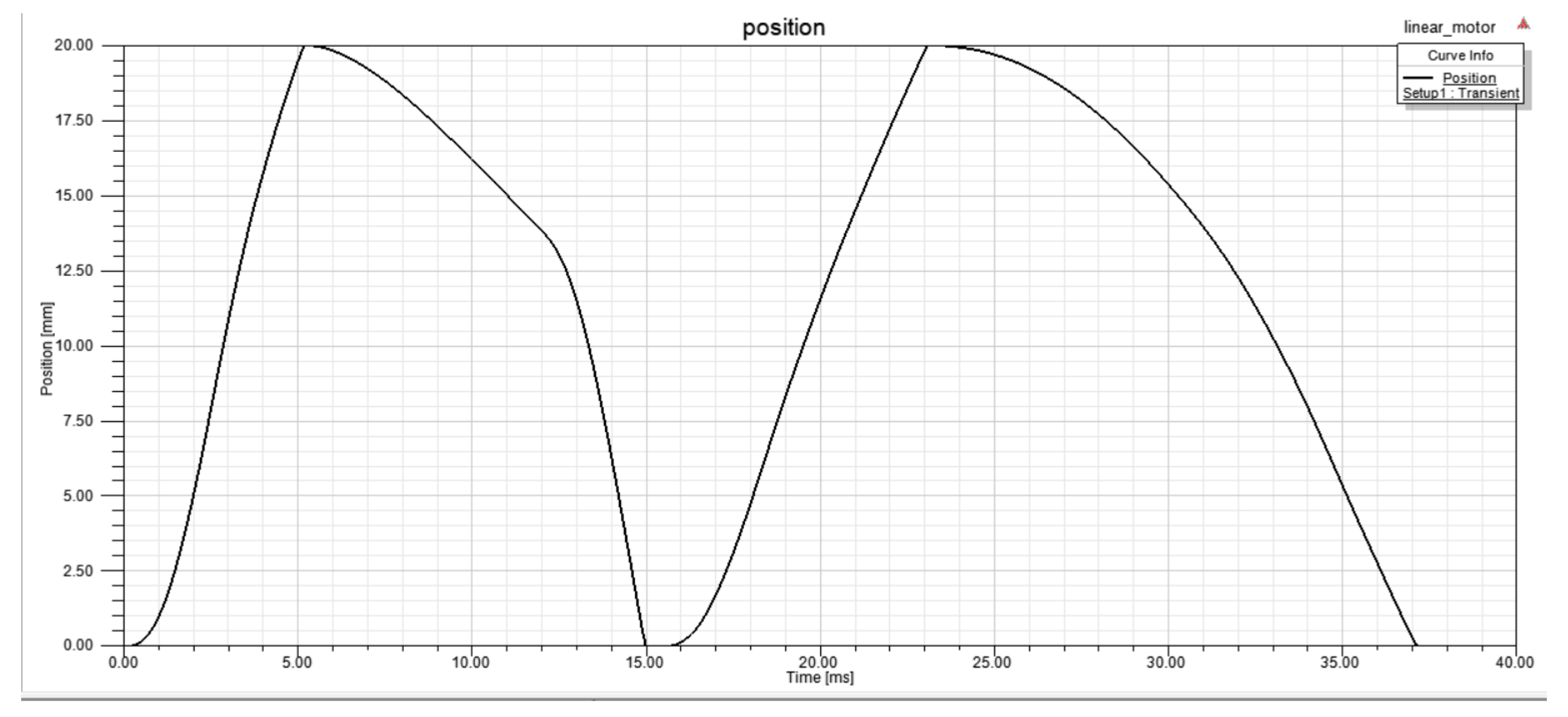
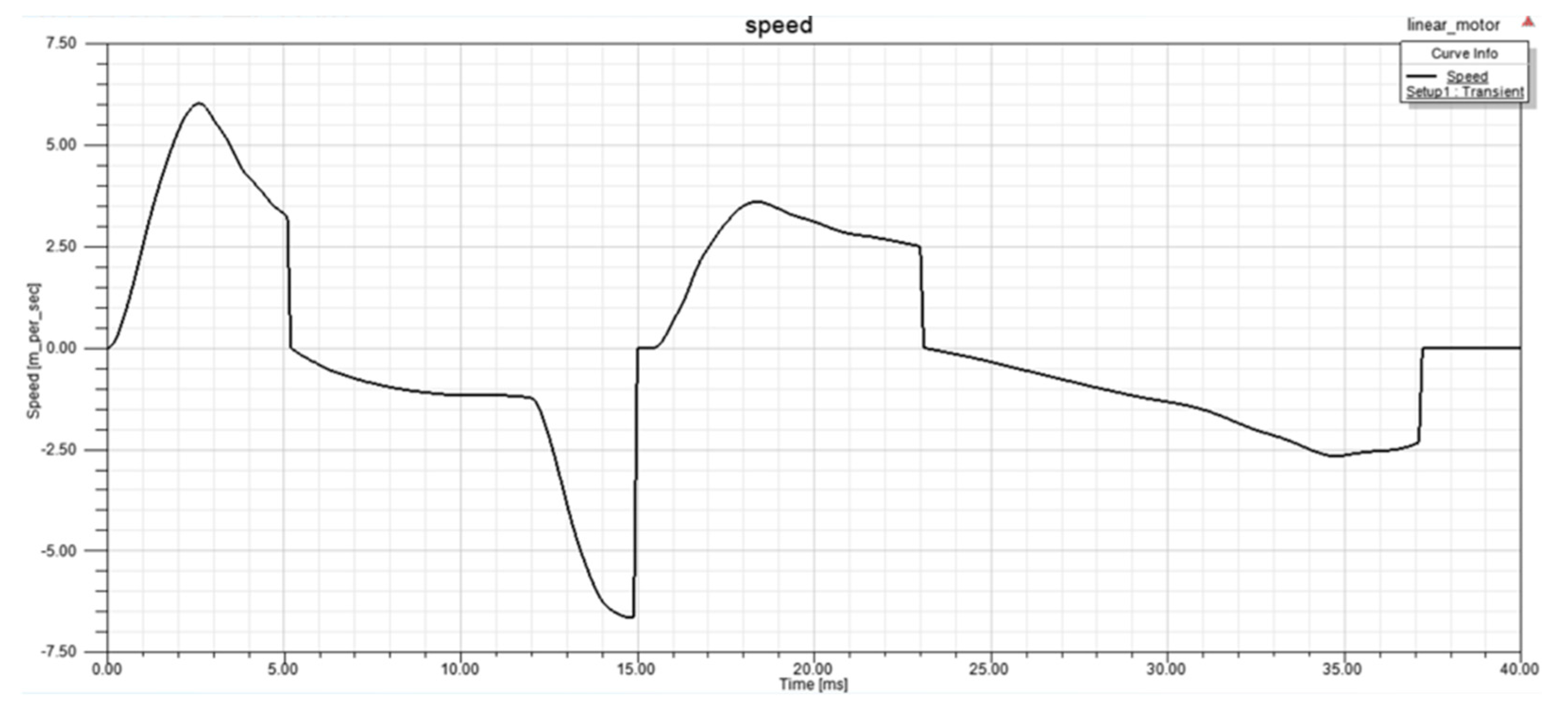
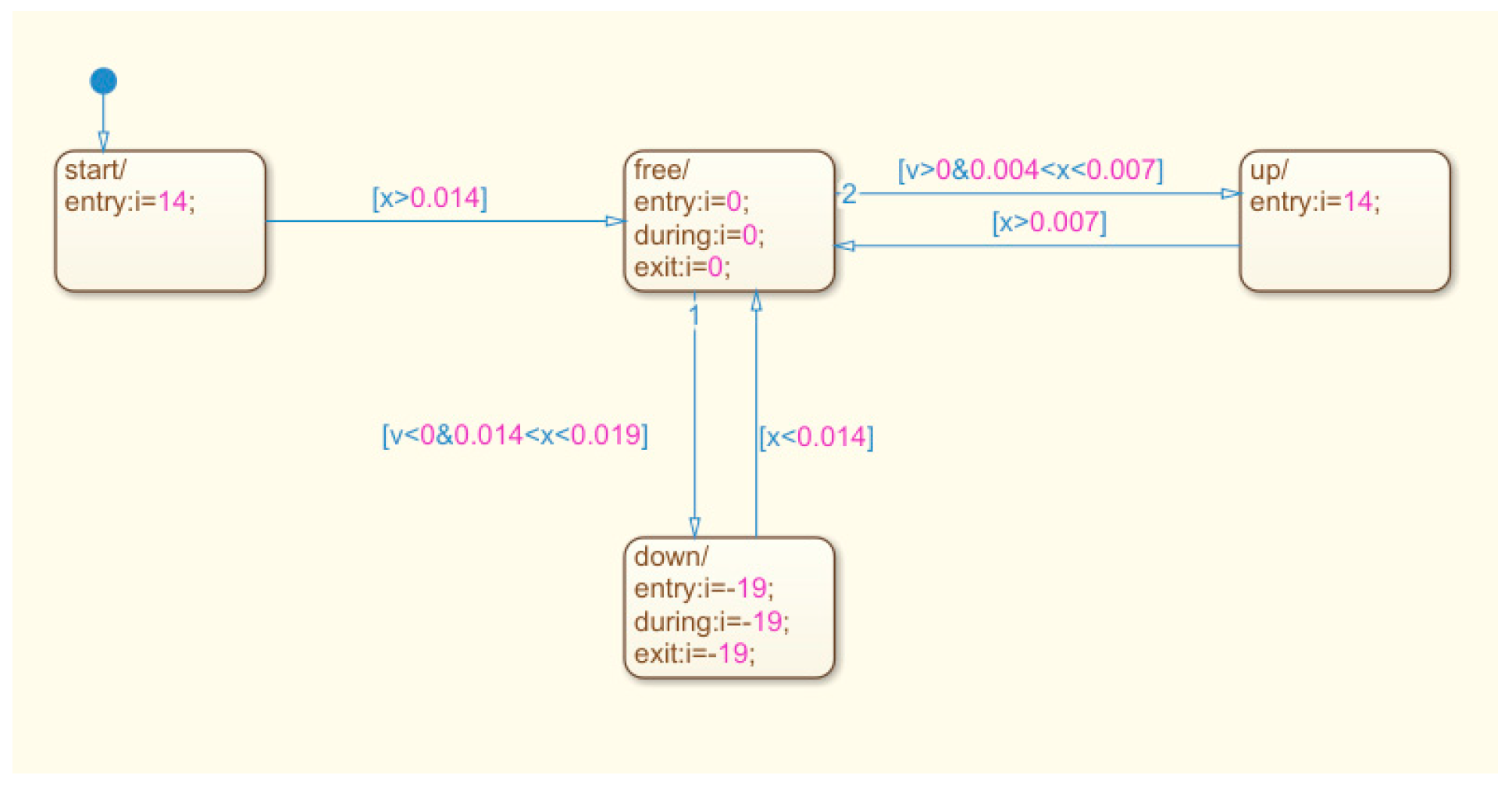
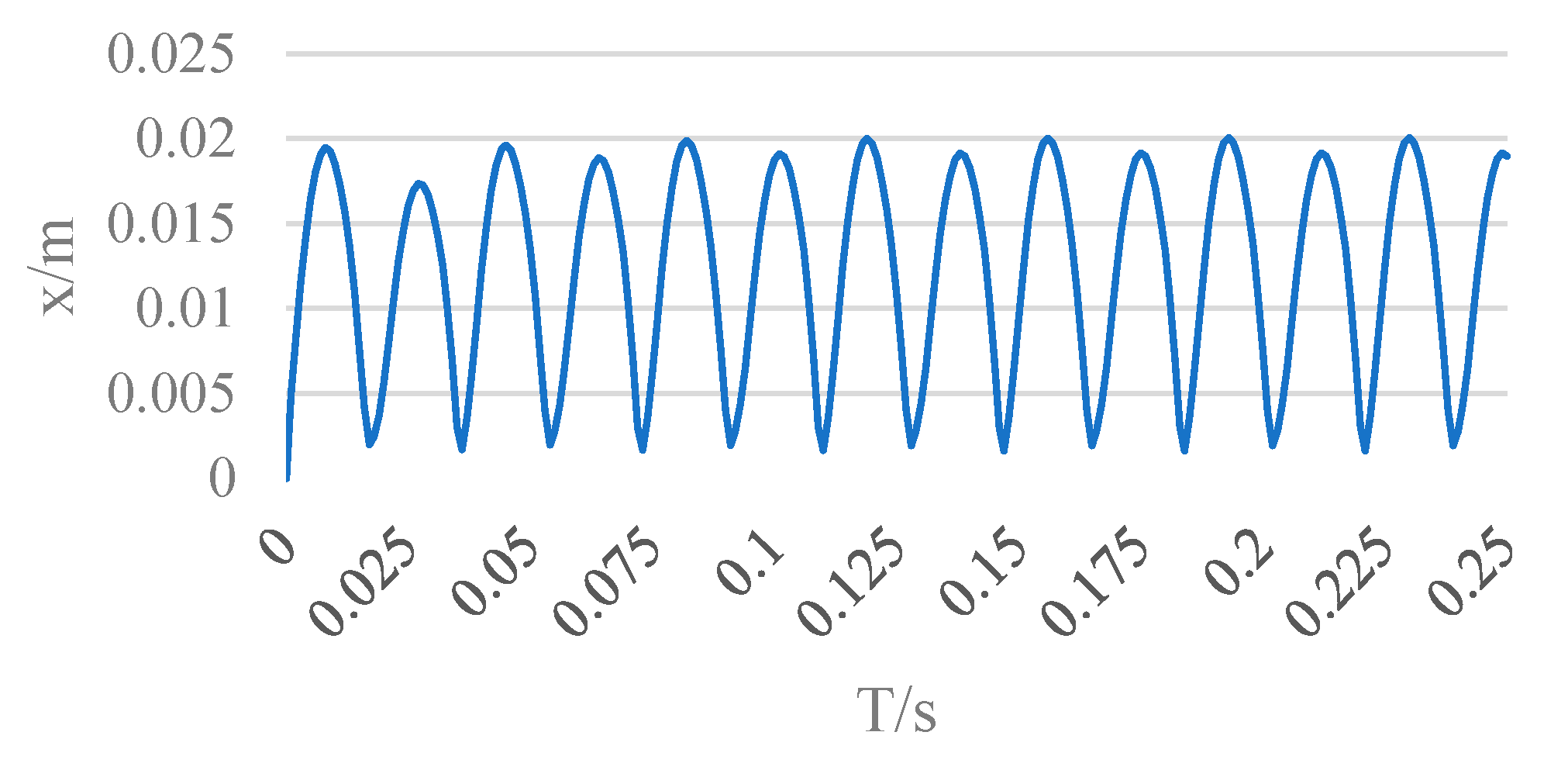
4.2.2. Dynamic Simulation Analysis
5. Discussion and Conclusions
- Based on the analysis of the working principle of moving-coil linear compressors, a direct-drive compressor with an electromagnetic linear actuator was designed. Compared to a traditional compressor, this paper adopts the direct-drive mode of high-performance electromagnetic linear actuator, which simplifies the structure, has no friction, reduces energy consumption, realizes the miniaturization and intelligent needs of the compressor, and improves the compressor efficiency.
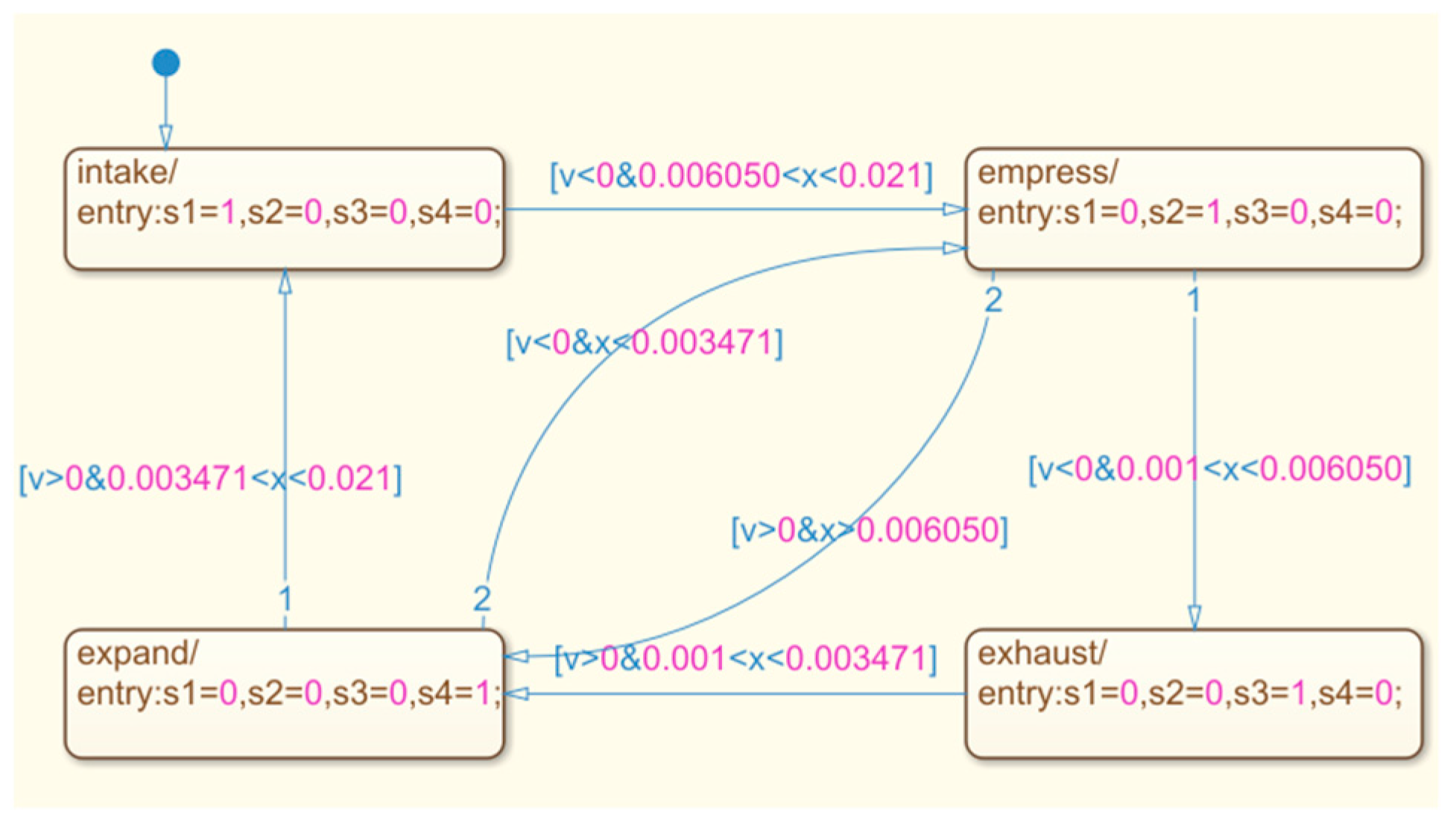
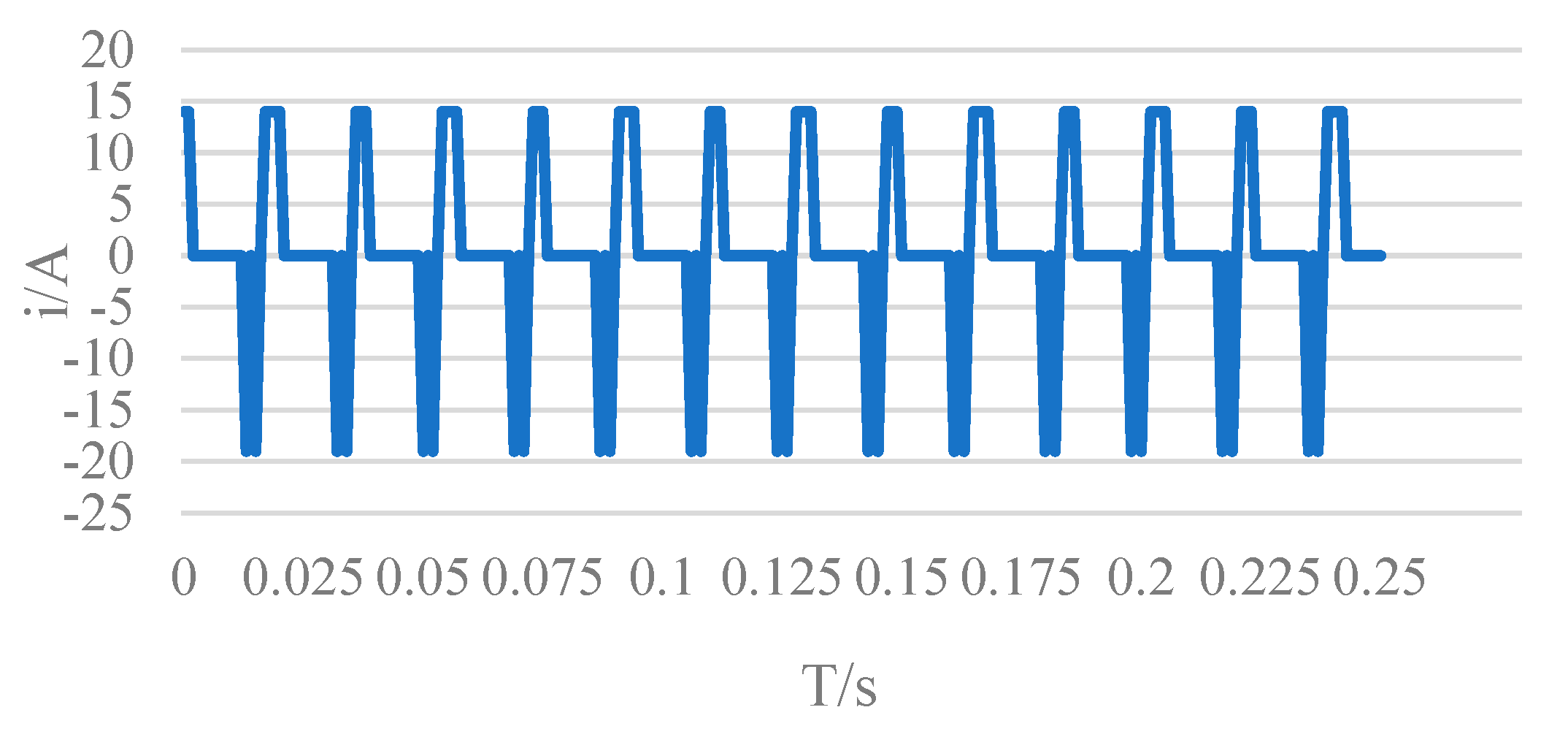
- The Maxwell and Simulink software were used to simulate the kinematics of the moving-coil linear compressor. The “push-to-push” control strategy was used to control the compressor current. The piston velocity displacement and electromagnetic force current exhibit periodic changes and meet the design requirements. Although the established design requirements are met, further experiments and improvements are needed in practical applications. This verifies the feasibility of a direct-drive compressor with a linear electromagnetic actuator.
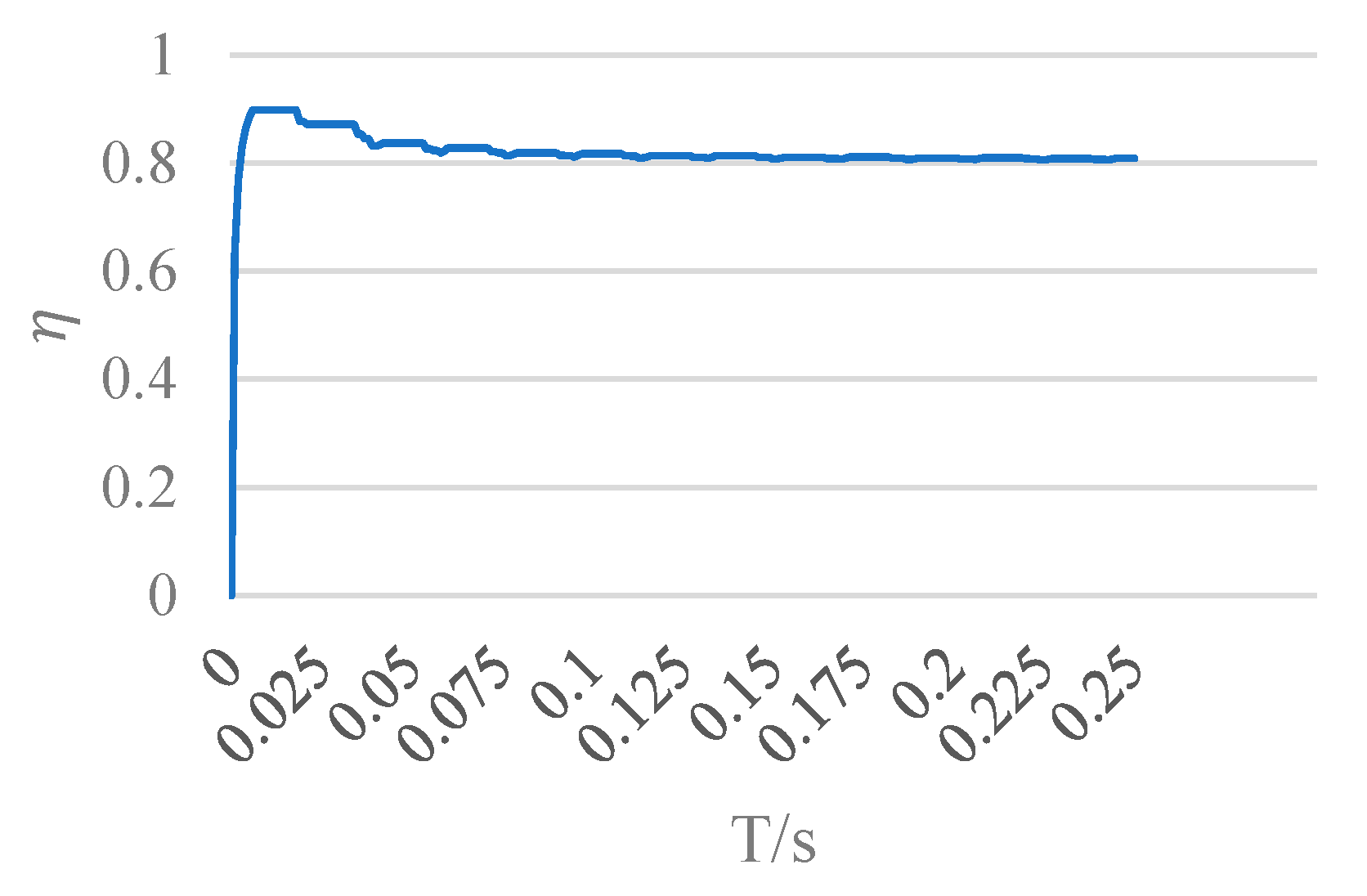
- Through the method of multiple trials, a set of data could be obtained to make the compressor work continuously, and the efficiency of the linear motor could reach 80%. In future work, through employing a control algorithm, the efficiency of the linear motor and the cooling efficiency can be improved.
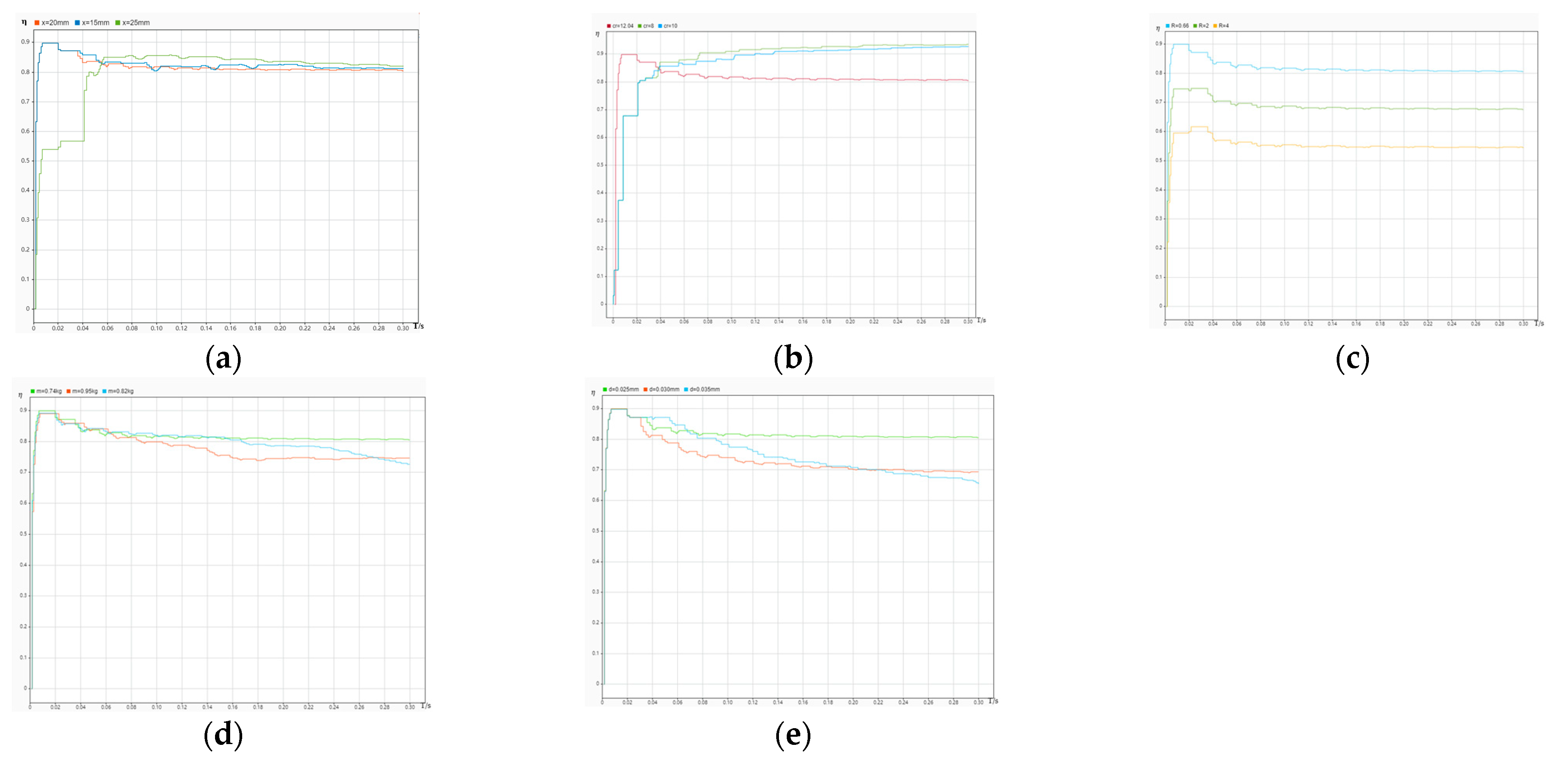
- Through simulation, the efficiency of the compressor under different strokes, different mover masses, different resistance and damping, different compression ratios and different piston diameters is obtained, which further verifies the feasibility of using electromagnetic actuators to directly drive compressors.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jin, T.; Zheng, S.; Xie, J.; Ma, Z. Research Status and Development of Linear Compressor. China Mech. Eng. 2004, 15, 89–93. [Google Scholar]
- Hassan, A.; Bijanzad, A.; Lazoglu, I. Electromechanical modeling of a novel moving magnet linear oscillating actuator. J. Mech. Sci. Technol. 2018, 32, 4423–4431. [Google Scholar] [CrossRef]
- Phadkule, S.; Inamdar, S.; Inamdar, A.; Jomde, A.; Bhojwani, V. Resonance analysis of opposed piston linear compressor for refrigerator application. Int. J. Ambient. Energy 2019, 40, 775–782. [Google Scholar] [CrossRef]
- Chen, X.; Jiang, H.; Li, Z.; Liang, K. Modelling and Measurement of a Moving Magnet Linear Motor for Linear Compressor. Energies 2020, 13, 4030. [Google Scholar] [CrossRef]
- Xie, J.; Jin, T.; Tong, S. Research Status and Development Trend of Linear Compressor. Fluid Mach. 2004, 32, 31–35. [Google Scholar]
- Gao, Y.; Hong, Q.; Fan, X.; Zhang, Z.; Wang, L.; Gao, R. Design and Experimental Research of Lightweight High-Efficiency Linear Compressor. Cryog. Supercond. 2017, 45, 23–27. [Google Scholar]
- Fang, X.; Chen, X.; Bao, X. Thermodynamic Analysis and Experimental Verification of a New Oilless Linear Compressor. Cryog. Supercond. 2021, 49, 73–77. [Google Scholar]
- Zhang, K.; Chen, J.; Li, H.; Bi, X.; Zou, D.; Yang, Y.; Shi, H. Research on Support Performance of Flexible Spring Assembly for Linear Compressor. Infrared Technol. 2020, 42, 198–203. [Google Scholar]
- Chen, H.; Zhao, Z.; Wang, X.; Ning, H.; Chen, H. Electromagnetic Field Simulation and Magnetic Yoke Structure Parameter Optimization of Linear Compressor. Mach. Des. Res. 2020, 36, 169–174. [Google Scholar]
- Zhu, S. Movement of linear compressor and displacer in a displacer pulse tube refrigerator. Cryogenics 2018, 97, 70–76. [Google Scholar] [CrossRef]
- Yan, H.; Liu, Y.; Lu, L. Turbulence anisotropy analysis in a highly loaded linear compressor cascade. Aerosp. Sci. Technol. 2019, 91, 241–254. [Google Scholar] [CrossRef]
- Chen, L.; Li, L. Overview of the development of linear motors for compressors and their key technologies. Proc. CSEE 2013, 33, 52–68+15. [Google Scholar]
- Bijanzad, A.; Hassan, A.; Lazoglu, I.; Kerpicci, H. Development of a new moving magnet linear compressor. Part A: Design and modeling. Int. J. Refrig. 2020, 113, 70–79. [Google Scholar] [CrossRef]
- Luo, L.; Zhang, G.; Liang, J.; Wang, W.; Xu, Z.; Gu, X.; Guo, Y.; Liang, S. Study on the high response characteristics of moving coil linear motors. Mach. Tool Hydraul. 2016, 44, 54–58+120. [Google Scholar]
- Abdalla, I.I.; Ibrahim, T.; Nor, N.B.M. Development and optimization of a moving-magnet tubular linear permanent magnet motor for use in a reciprocating compressor of household refrigerators. Electr. Power Energy Syst. 2016, 77, 263–270. [Google Scholar] [CrossRef]
- Mao, J.; Wang, N.; Chen, H. Dynamic characteristics of kinetic linear compressors. Mach. Des. Res. 2022, 38, 205–209+214. [Google Scholar]
- Zou, H.; Li, C.; Tang, M.; Wang, M.; Tian, C. Online measuring method and dynamic characteristics of gas kinetic parameters of linear compressor. Measurement 2018, 125, 545–553. [Google Scholar] [CrossRef]
- Liu, Y. Design of Control System of Dynamic Magnetic Linear Motor for Compressor. Master’s Thesis, Shenzhen University, Shenzhen, China, 2017. [Google Scholar]
- Wang, L. Dynamic Gas Analysis and Valve Research of Linear Compressors for Refrigeration. Master’s Thesis, Hefei University of Technology, Hefei, China, 2013. [Google Scholar]
- Tan, J.; Dang, H. Effects of the driving voltage waveform on the performance of the Stirling-type pulse tube cryocooler driven by the moving-coil linear compressor. Int. J. Refrig. 2017, 75, 239–249. [Google Scholar] [CrossRef]
- Yang, X.; Lu, D.; Ma, C.; Zhang, J.; Zhao, W. Analysis on the multi-dimensional spectrum of the thrust force for the linear motor feed drive system in machine tools. Mech. Syst. Signal Process. 2017, 82, 68–79. [Google Scholar] [CrossRef]
- Zhu, J.; Liu, W.; Tang, W.; Li, J.; Li, H.; Xu, X.; Dai, J.; Wang, C. A Moving-Coil Linear Compressor. Patent CN212028006U, 27 November 2020. [Google Scholar]
- Kan, X.; Wu, W.; Yang, L.; Zhong, J. Effects of End-Bend and Curved Blades on the Flow Field and Loss of a Compressor Linear Cascade in the Design Condition. J. Therm. Sci. 2019, 28, 801–810. [Google Scholar] [CrossRef]
- Sun, Z.; Shi, Y.; Zhang, H. Research on linear compressor control strategy based on Push-to-Push principle. Mech. Eng. Autom. 2016, 45, 167–170. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item Name | Parameter Requirement |
|---|---|
| Rated voltage/V | 12 (V) |
| Maximum current/A | 10 (A) |
| Rated power/kw | 3 (kw) |
| Maximum thrust/N | 450 (N) |
| Maximum stroke/mm | 20 (mm) |
| Structure Name | Size |
|---|---|
| Stator outer diameter (mm) | 84 |
| Stator inner diameter (mm) | 24 |
| Permanent magnet internal diameter (mm) | 38 |
| Motor length (mm) | 194 |
| Moving-coil length (mm) | 185 |
| Parameter Name | Value |
|---|---|
| Promoter mass | 0.74 kg |
| Piston diameter | 0.025 m |
| Linear motor force constant | 40 N/A |
| Intake pressure | 0.84378 MPa |
| Exhaust pressure | 1.0166 MPa |
| Piston stroke | 20 mm |
| Self-inductance coefficient | 1.1 mH |
| Coil loop resistance | 0.66 Ω |
| Damping factor | 20 N·s/m |
| Spring rate | 22,950 N/m |
| Item Name | Material Name |
|---|---|
| (inner) inner magnetic yoke | Steel_1008 |
| (outer) outer magnetic yoke | Steel_1008 |
| (under) bottom plate | Steel_1008 |
| (coil) | Cooper |
| (former) coil former | Teflon |
| (PM) Permanent magnet | NdFeB35 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, J.; Xue, M.; Dai, J.; Yang, Z.; Yang, J. Simulation Study on Direct-Drive Compressor with Electromagnetic Linear Actuator. Actuators 2023, 12, 185. https://doi.org/10.3390/act12050185
Zhu J, Xue M, Dai J, Yang Z, Yang J. Simulation Study on Direct-Drive Compressor with Electromagnetic Linear Actuator. Actuators. 2023; 12(5):185. https://doi.org/10.3390/act12050185
Chicago/Turabian StyleZhu, Jianhui, Mengmeng Xue, Jianguo Dai, Zongzheng Yang, and Jingnan Yang. 2023. "Simulation Study on Direct-Drive Compressor with Electromagnetic Linear Actuator" Actuators 12, no. 5: 185. https://doi.org/10.3390/act12050185
APA StyleZhu, J., Xue, M., Dai, J., Yang, Z., & Yang, J. (2023). Simulation Study on Direct-Drive Compressor with Electromagnetic Linear Actuator. Actuators, 12(5), 185. https://doi.org/10.3390/act12050185