
A 1-DOF Modular Robotic Hand Inspired by Human Two-Arm Cooperative Handling Strategy
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
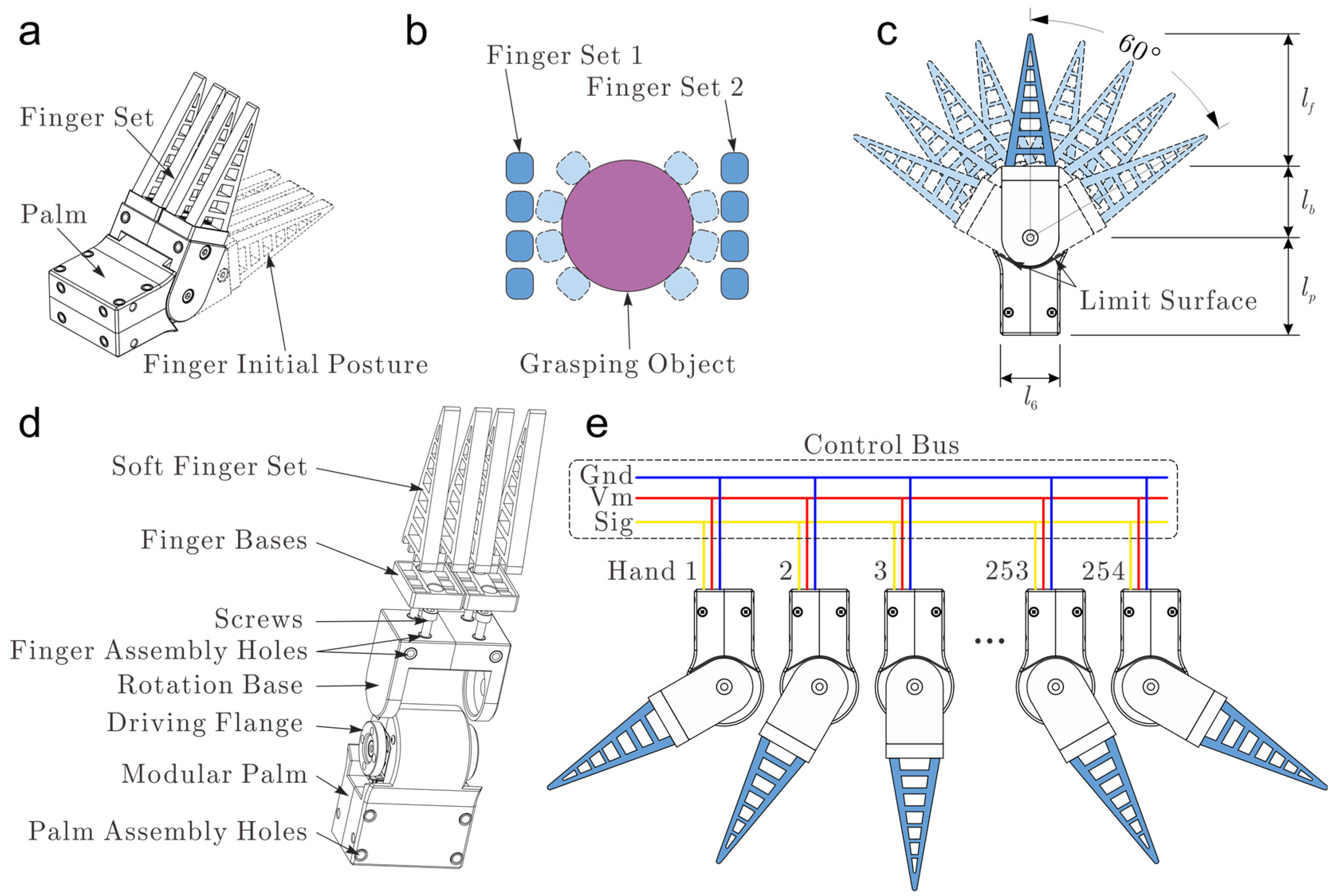
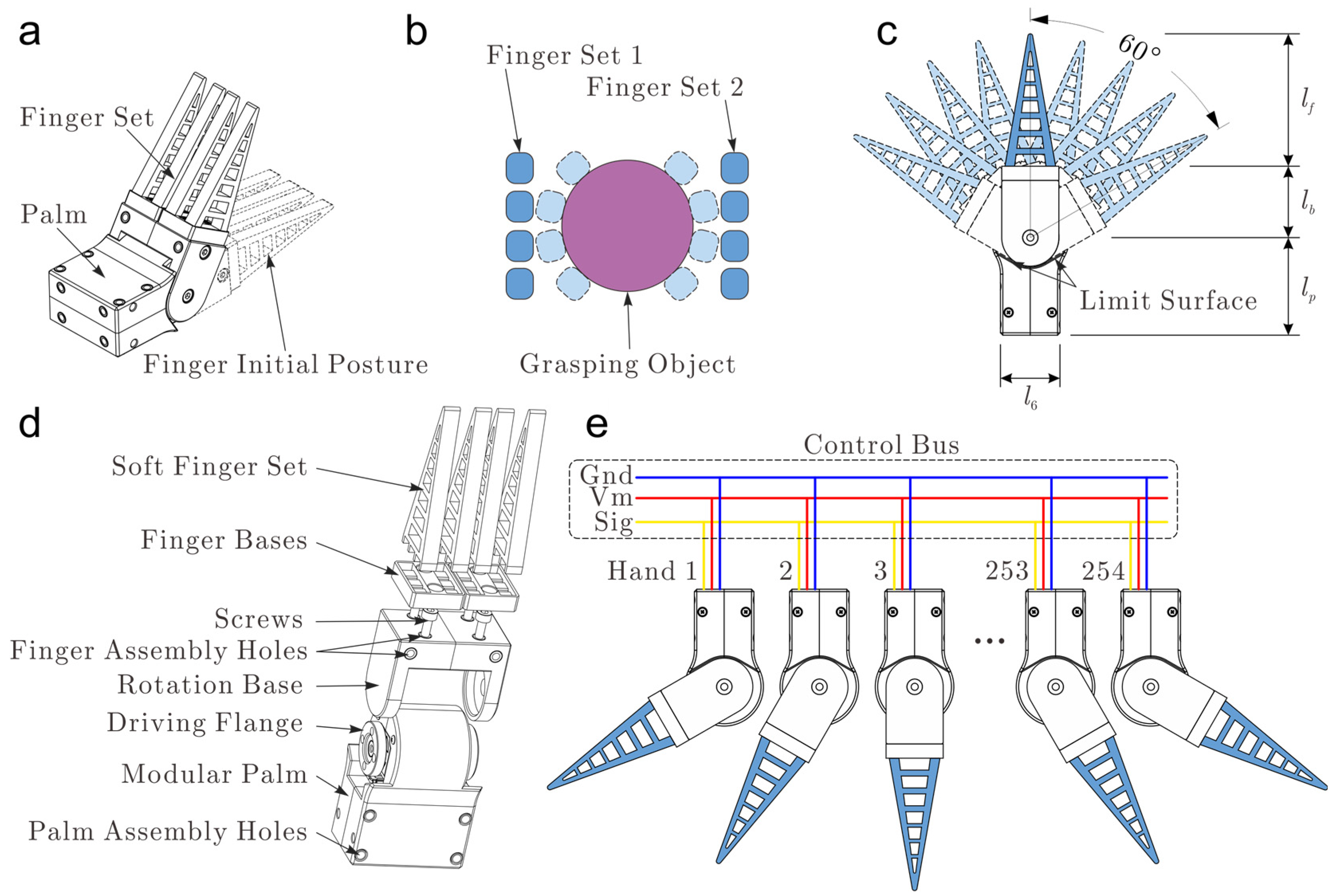
2. Structure Design
2.1. Design of the Modular Hand
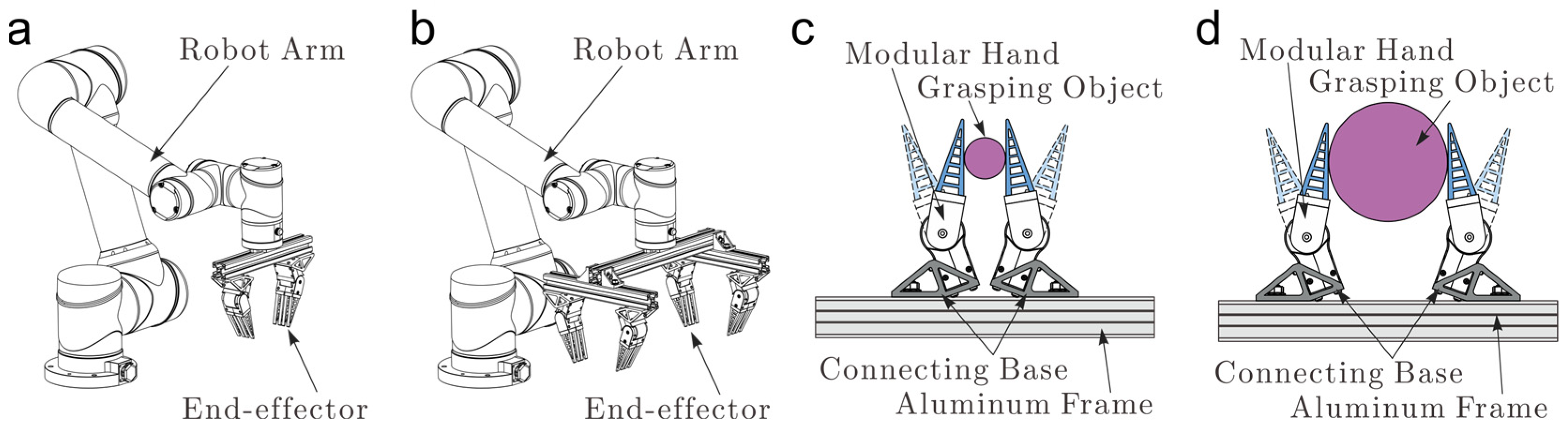
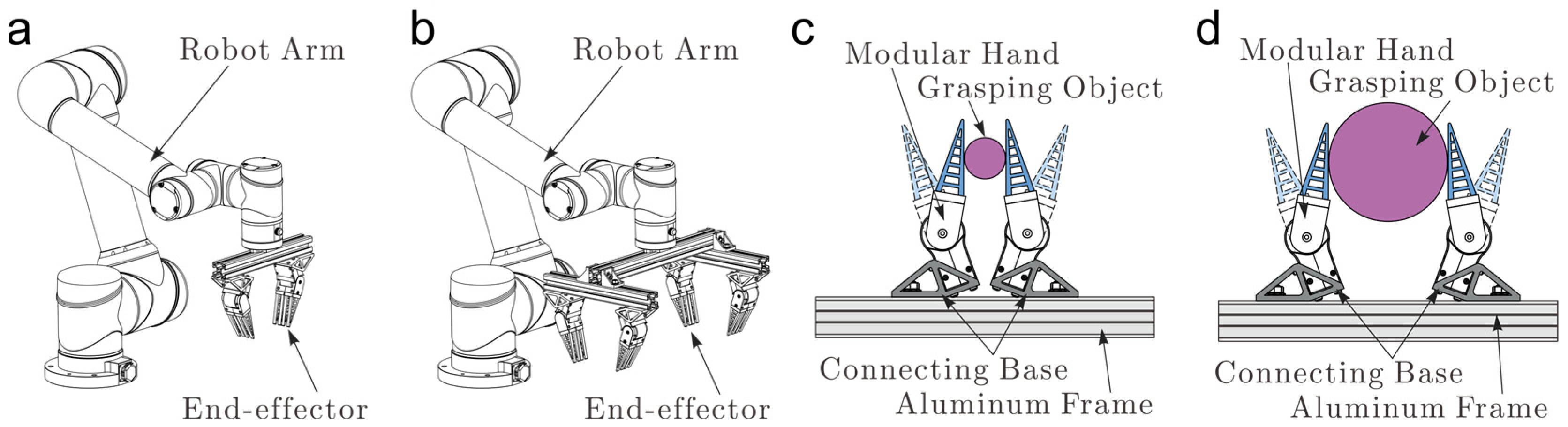
2.2. Application Schemes
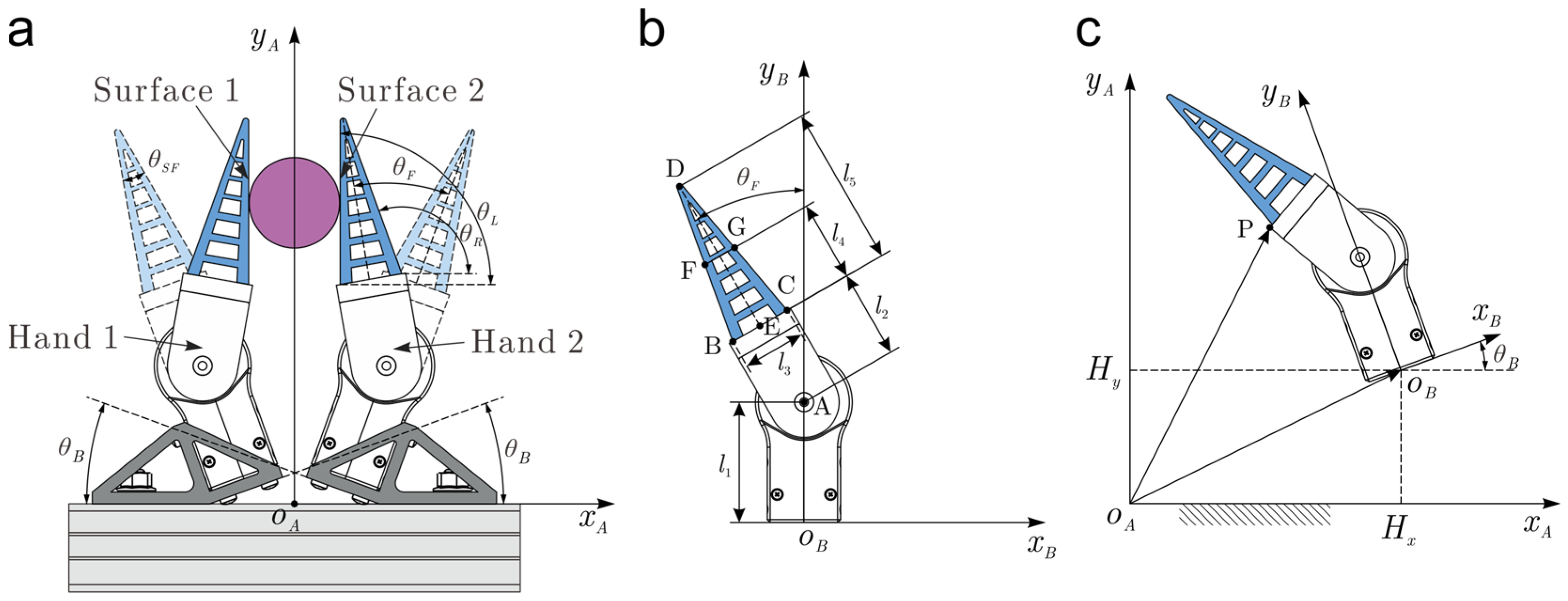
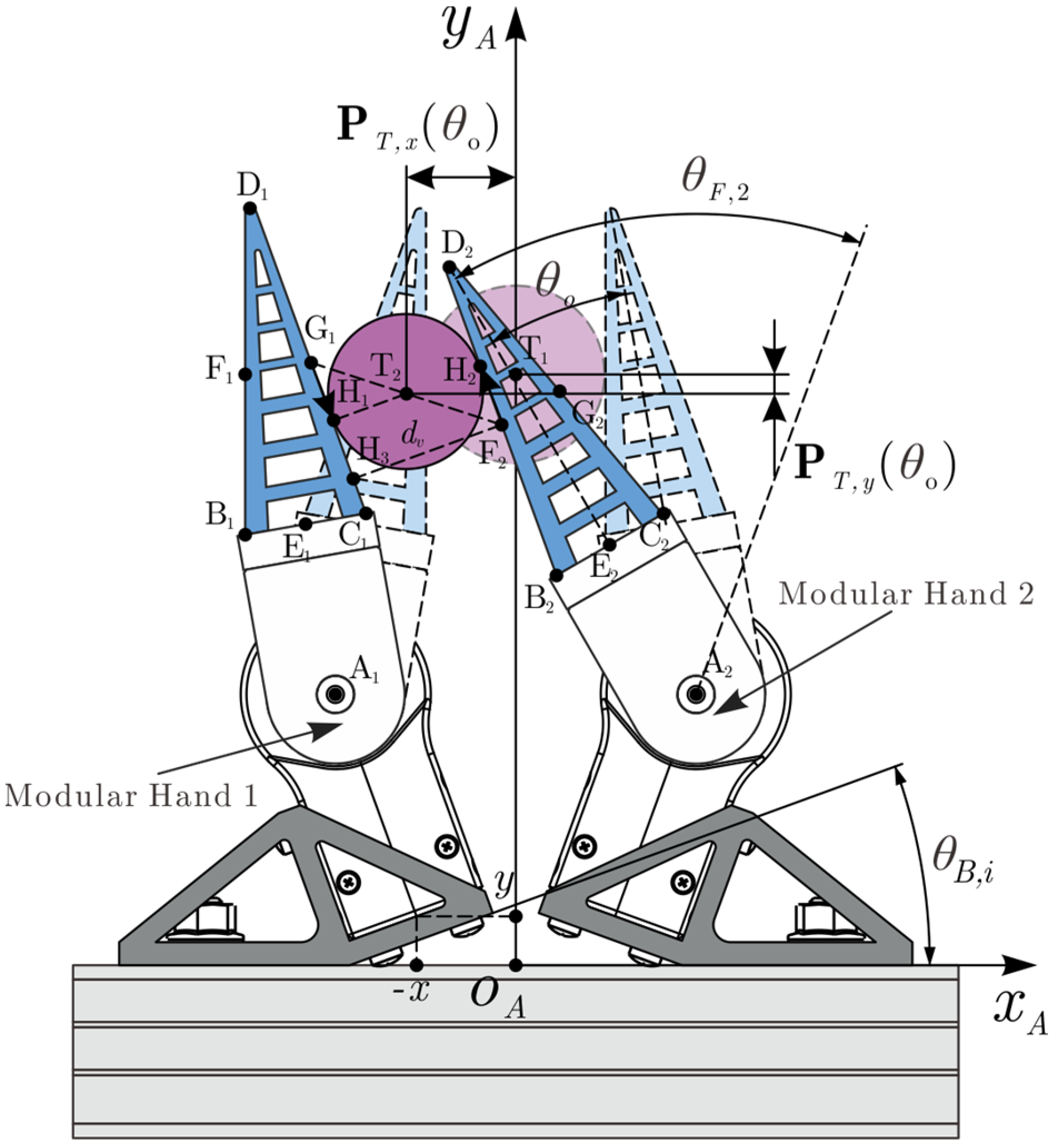
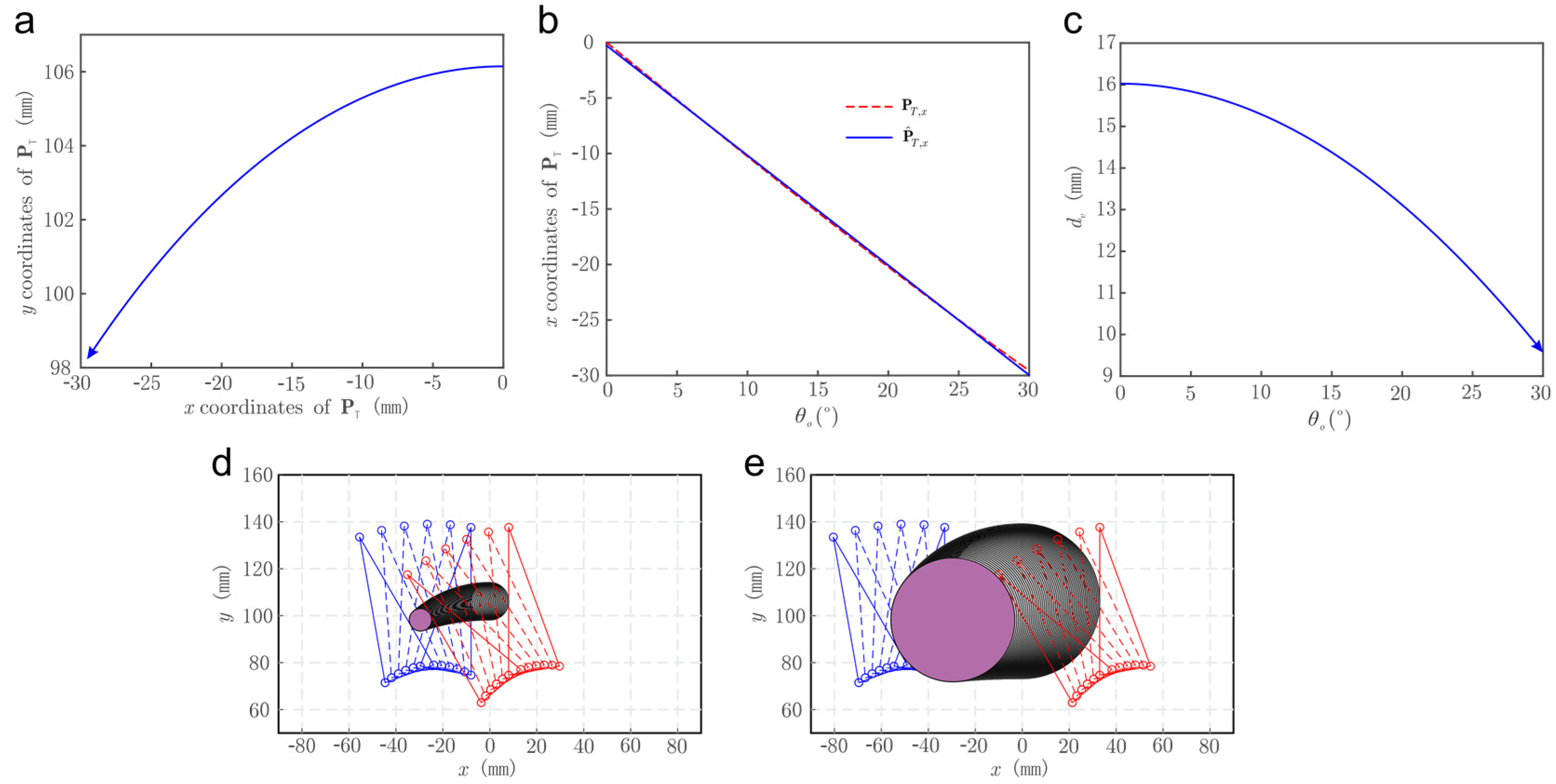
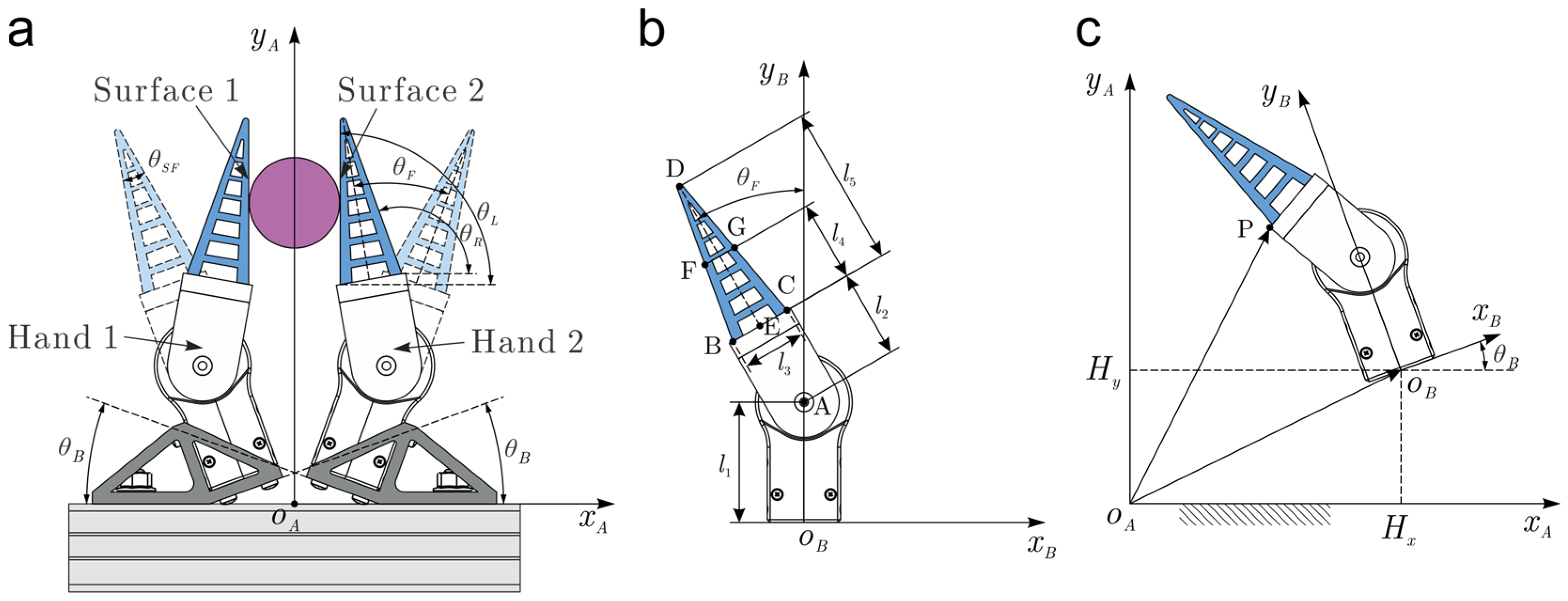
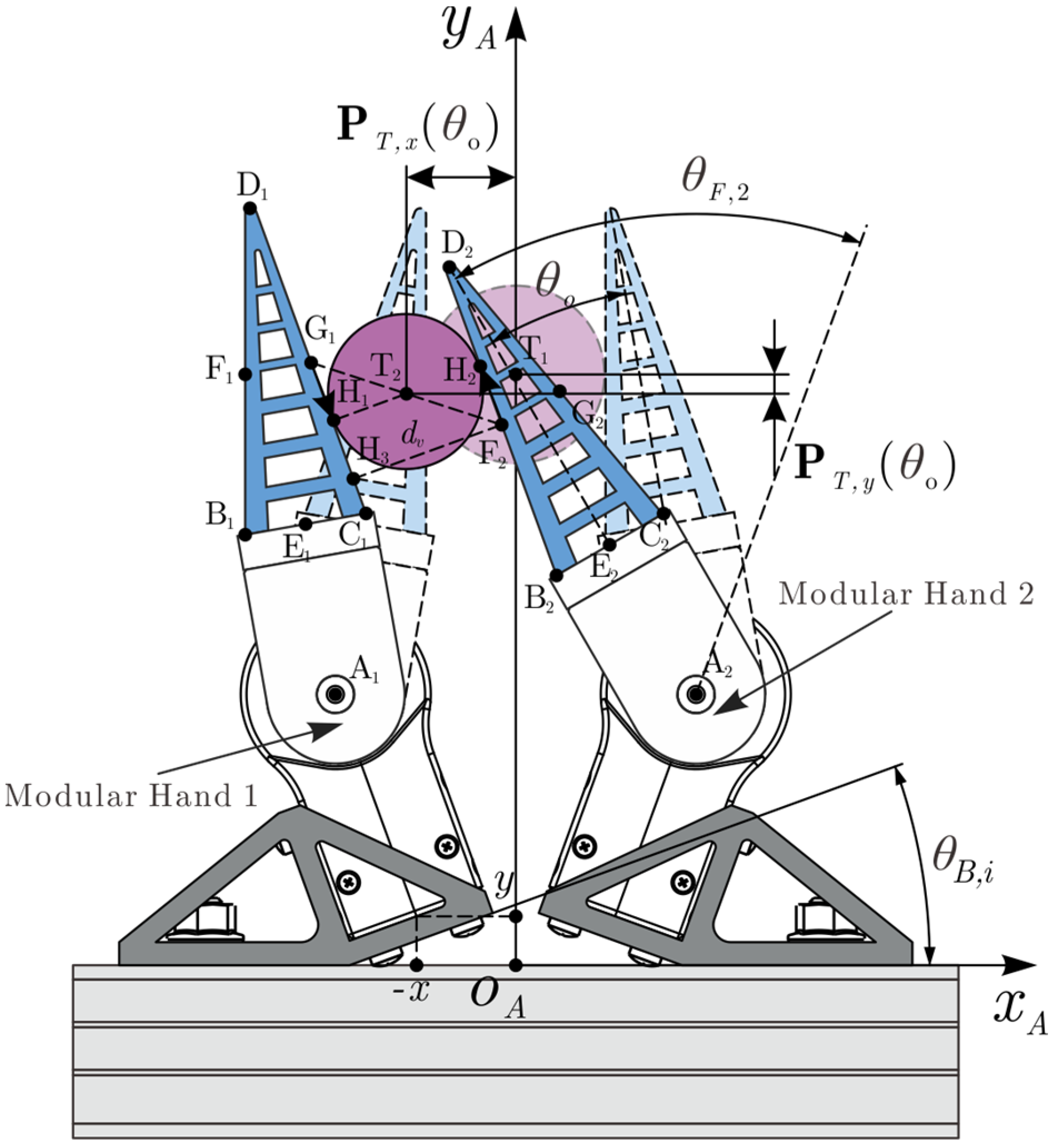
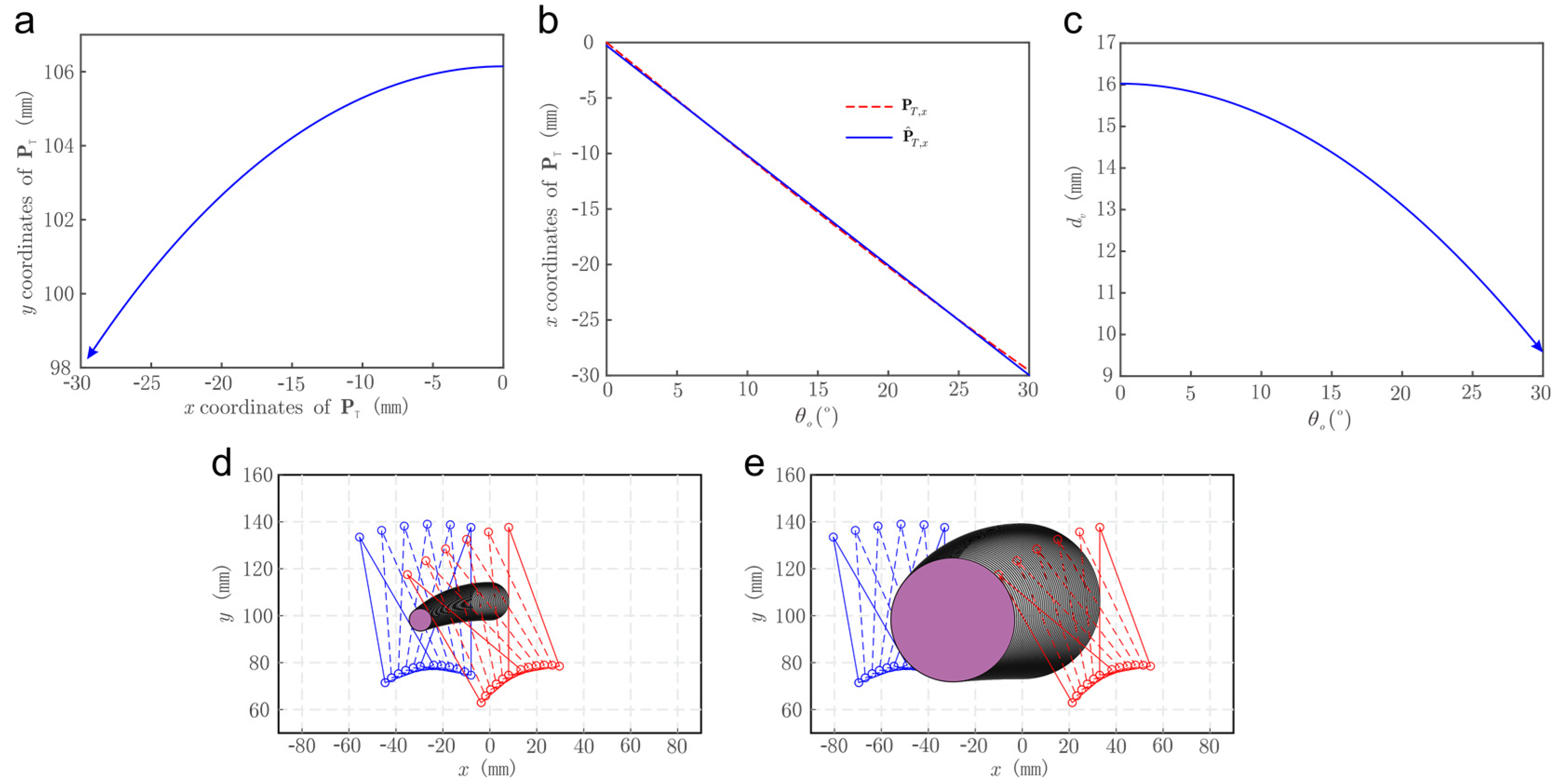
3. Kinematic Modeling of the Modular Hand
4. Results
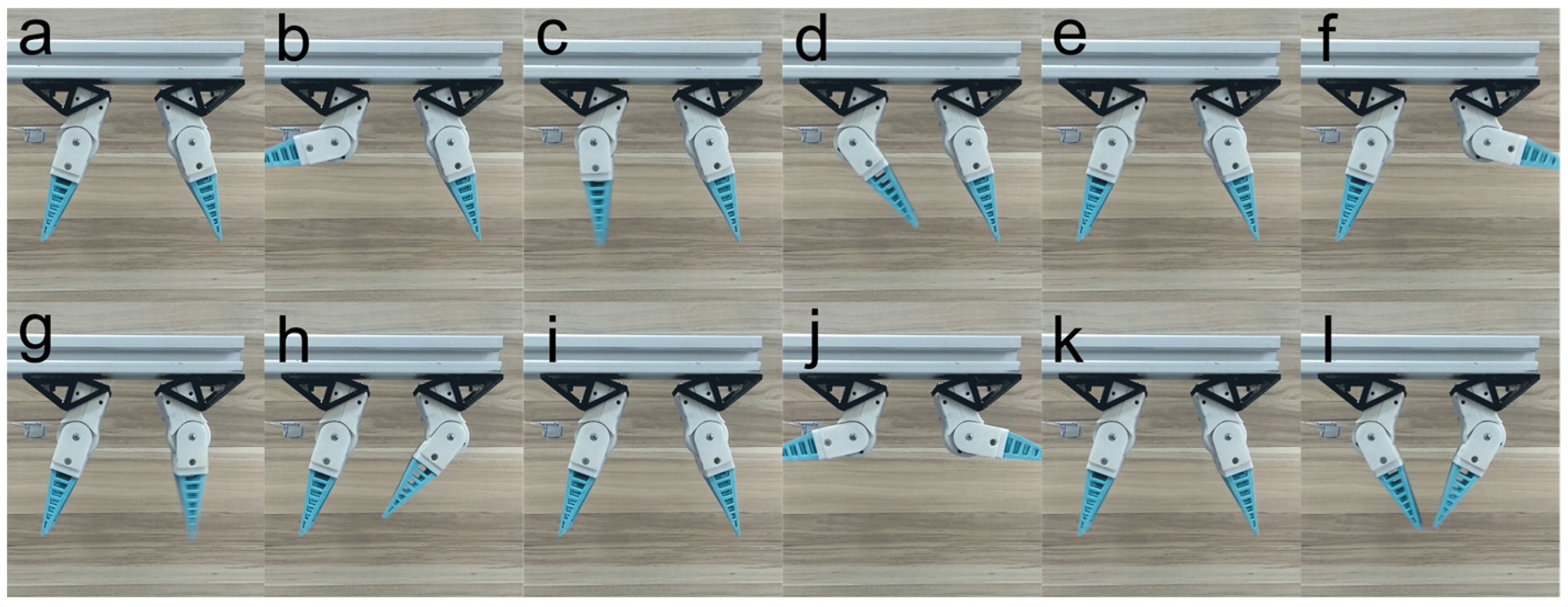
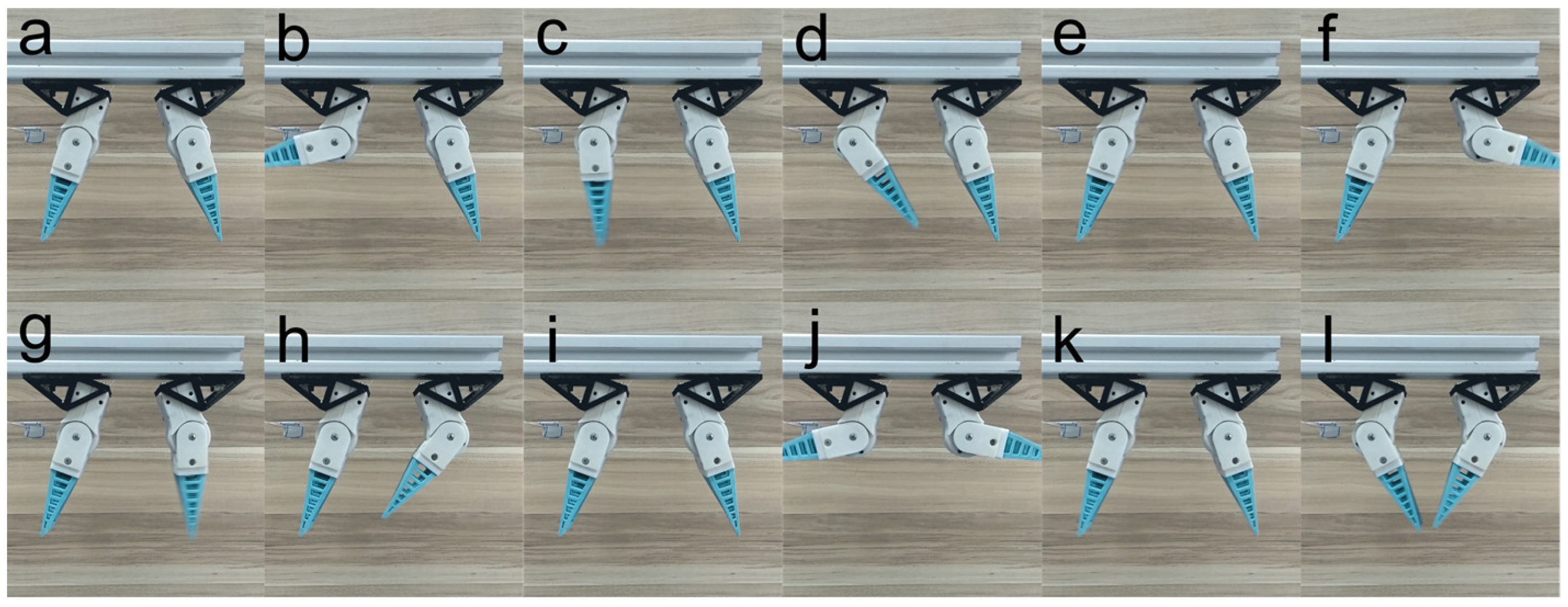
4.1. Independent Motion Control of Modular Hand
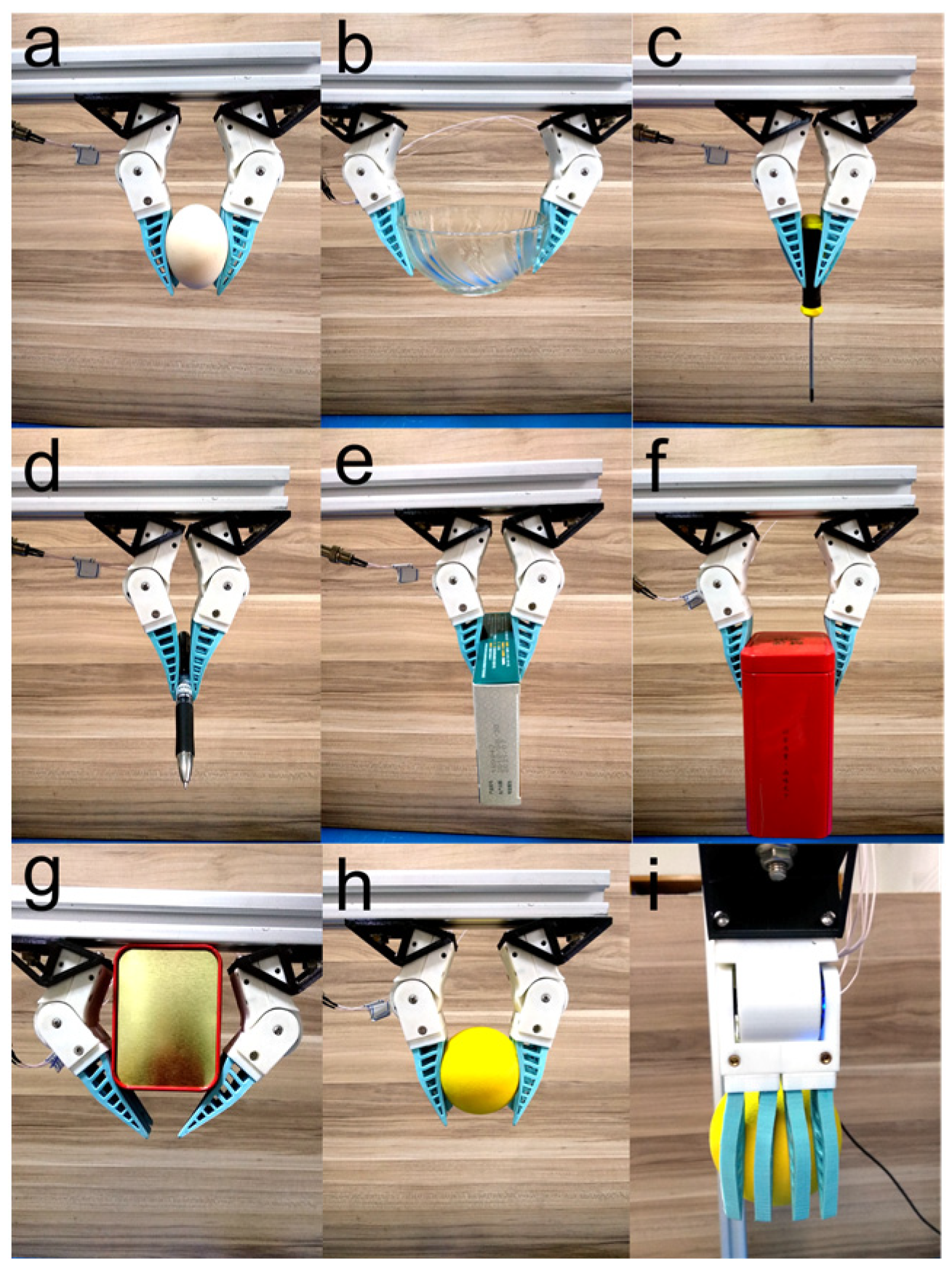
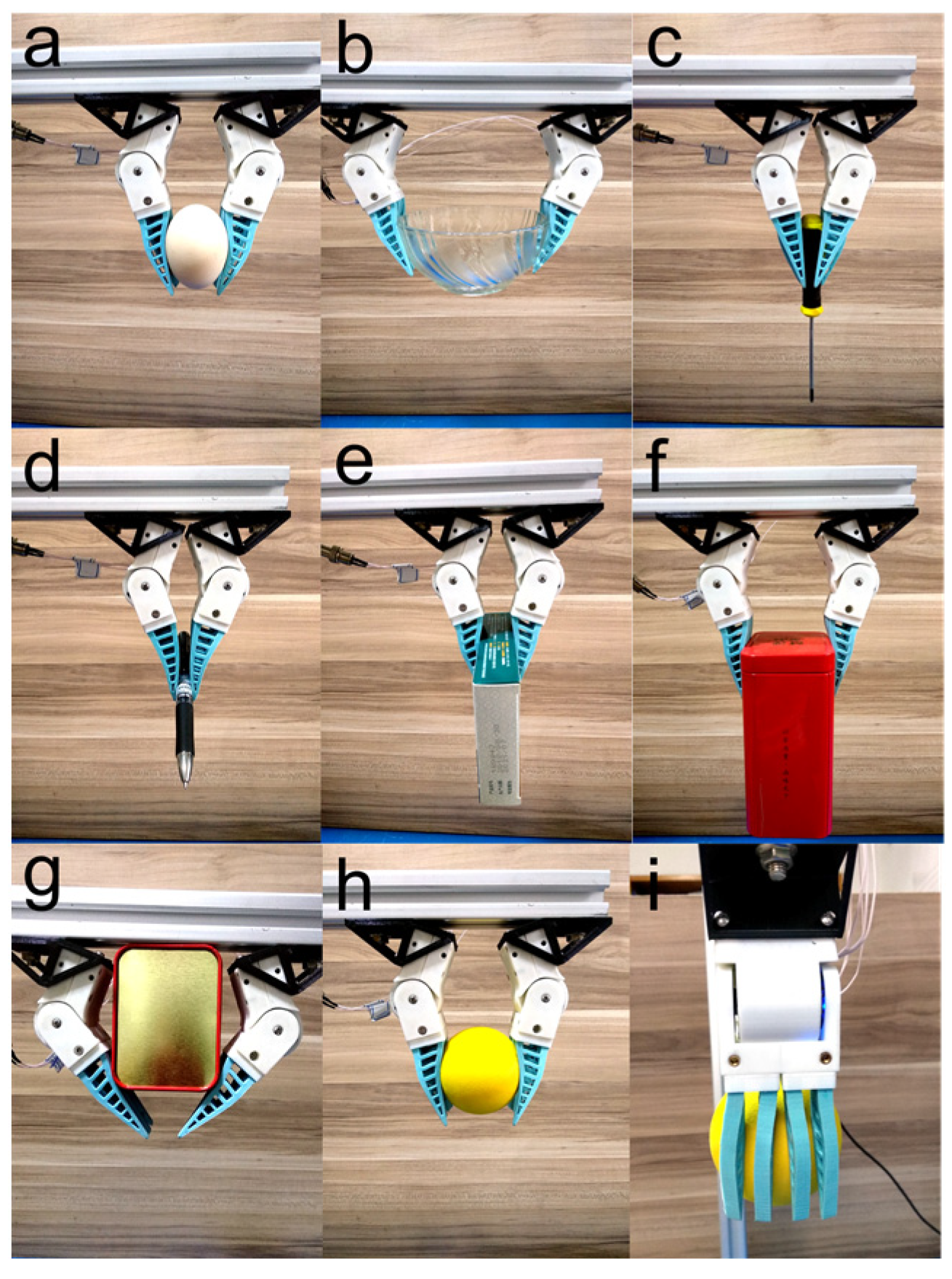
4.2. Object Grasping
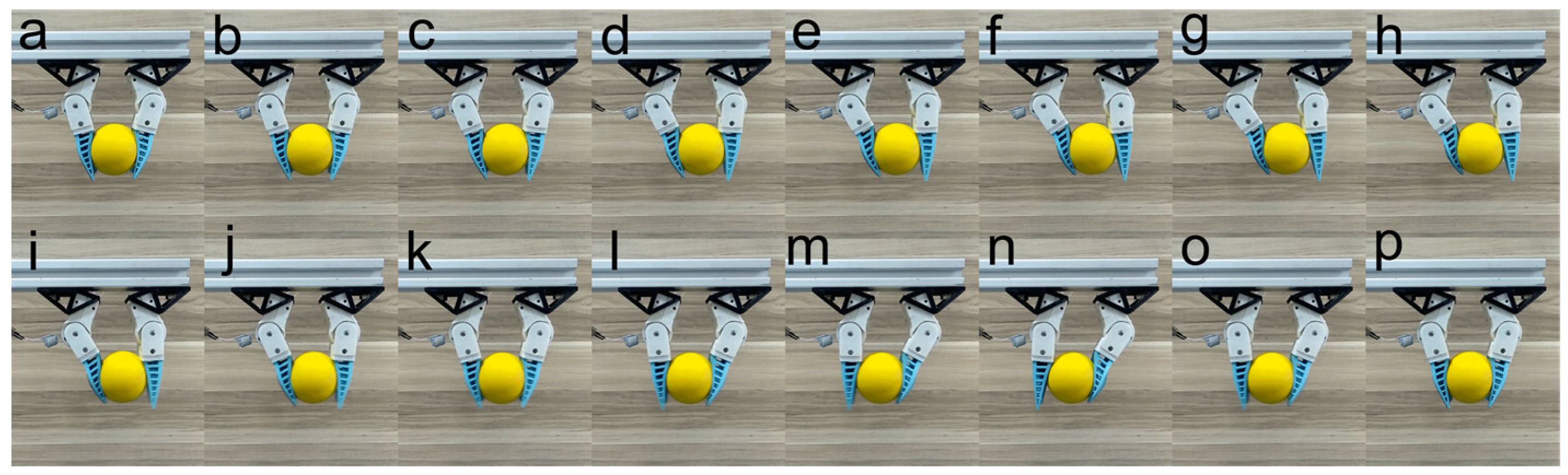
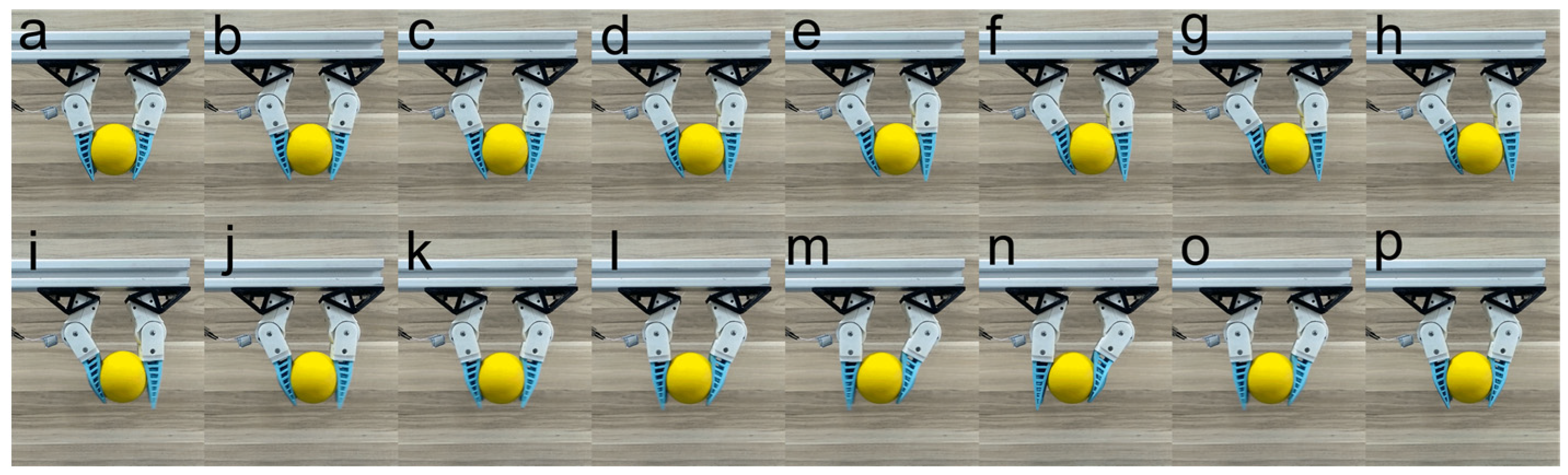
4.3. Object Operation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Blanes, C.; Ortiz, C.; Mellado, M.; Beltrán, P. Assessment of eggplant firmness with accelerometers on a pneumatic robot gripper. Comput. Electron. Agric. 2015, 113, 44–50. [Google Scholar] [CrossRef]
- Ji, W.; Qian, Z.; Xu, B.; Chen, G.; Zhao, D. Apple viscoelastic complex model for bruise damage analysis in constant velocity grasping by gripper. Comput. Electron. Agric. 2019, 162, 907–920. [Google Scholar] [CrossRef]
- Zhang, B.; Xie, Y.; Zhou, J.; Wang, K.; Zhang, Z. State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review. Comput. Electron. Agric. 2020, 177, 105694. [Google Scholar] [CrossRef]
- Wang, Z.; Hirai, S. A Soft Gripper with Adjustable Stiffness and Variable Working Length for Handling Food Material. In Proceedings of the 2018 IEEE International Conference on Real-Time Computing and Robotics (RCAR), Kandima, Maldives, 1–5 August 2018; pp. 25–29. [Google Scholar]
- Kuriyama, Y.; Okino, Y.; Wang, Z.; Hirai, S. A Wrapping Gripper for Packaging Chopped and Granular Food Materials. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Republic of Korea, 14–18 April 2019; pp. 114–119. [Google Scholar]
- Wang, Z.; Torigoe, Y.; Hirai, S. A prestressed soft gripper: Design, modeling, fabrication, and tests for food handling. IEEE Robot. Autom. Lett. 2017, 2, 1909–1916. [Google Scholar] [CrossRef]
- Zhongkui, W.; Keung, O.; Shinichi, H. A dual-mode soft gripper for food packaging. Robot. Auton. Syst. 2020, 125, 103427. [Google Scholar]
- Jiang, S.H.; Song, W.; Zhou, Z.K.; Sun, S.J. Stability analysis of the food delivery robot with suspension damping structure. Heliyon 2022, 8, 18. [Google Scholar] [CrossRef] [PubMed]
- Guo, J.; Low, J.-H.; Liang, X.; Lee, J.S.; Wong, Y.-R.; Yeow, R.C.H. A Hybrid Soft Robotic Surgical Gripper System for Delicate Nerve Manipulation in Digital Nerve Repair Surgery. IEEE ASME Trans. Mechatron. 2019, 24, 1440–1451. [Google Scholar] [CrossRef]
- Selvaggio, M.; Fontanelli, G.A.; Marrazzo, V.R.; Bracale, U.; Irace, A.; Breglio, G.; Villani, L.; Siciliano, B.; Ficuciello, F. The MUSHA underactuated hand for robot-aided minimally invasive surgery. Int. J. Med. Robot. Comput. Assist. Surg. 2019, 15, e1981. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, Y.; Xu, L.; Zou, Y.; Faragasso, A.; Lueth, T.C. Automatic design of compliant surgical forceps with adaptive grasping functions. IEEE Robot. Autom. Lett. 2020, 5, 1095–1102. [Google Scholar] [CrossRef]
- Mouazé, N.; Birglen, L. Bistable compliant underactuated gripper for the gentle grasp of soft objects. Mech. Mach. Theory 2022, 170, 104676. [Google Scholar] [CrossRef]
- Hua, H.; Liao, Z.; Chen, Y.; Xu, C. Design and Test of Compact Series Elastic Force Actuator for Grasping Mechanism. Trans. Chin. Soc. Agric. Mach. 2021, 52, 426–432. [Google Scholar]
- Hua, H.; Song, J.; Liao, Z.; Zhao, J. Design and Experiment of Miniature Linear Series Elastic Actuator for Robotic Grasping. Trans. Chin. Soc. Agric. Mach. 2022, 53, 500–506. [Google Scholar]
- Yoon, S.J.; Choi, M.; Jeong, B.; Park, Y.-L. Elongatable Gripper Fingers With Integrated Stretchable Tactile Sensors for Underactuated Grasping and Dexterous Manipulation. IEEE Trans. Robot. 2022, 38, 2179–2193. [Google Scholar] [CrossRef]
- Yamashita, T.; Suzuki, H.; Tasaki, R. Motion and force measurement of human fingertips during manual operation to achieve high-precision assembly by articulated robots. Meas. Sens. 2022, 20, 100413. [Google Scholar] [CrossRef]
- Ostyn, F.; Vanderborght, B.; Crevecoeur, G. Design and Control of a Quasi-Direct Drive Robotic Gripper for Collision Tolerant Picking At High Speed. IEEE Robot. Autom. Lett. 2022, 7, 7692–7699. [Google Scholar] [CrossRef]
- Hua, H.; Zhao, J.; Liao, Z.; Chen, Y. Unconstrained Bezier Calibration Method for Nonlinear Measurement Calibration Applications: A Comparison Study. IEEE Instrum. Meas. Mag. 2023, 26, 42–50. [Google Scholar] [CrossRef]
- Hua, H.; Song, J.; Zhao, J.; Liao, Z. Sensor-less Grasping Force Control of a Pneumatic Underactuated Robotic Gripper. J. Mech. Robot. 2023, 16, 031005. [Google Scholar] [CrossRef]
- Hua, H.; Liao, Z.; Zhao, J. Design, Analysis, and Experiment of an Underactuated Robotic Gripper Actuated by Linear Series Elastic Actuator. J. Mech. Robot. 2022, 15, 021002. [Google Scholar] [CrossRef]
- Dong, R.W.; Li, M.X.; Sun, A.; Lu, Z.R.; Jiang, D.; Chen, W.Y. Balancing of Motor Armature Based on LSTM-ZPF Signal Processing. Sensors 2022, 22, 9043. [Google Scholar] [CrossRef]
- Gong, Z.; Fang, X.; Chen, X.; Cheng, J.; Xie, Z.; Liu, J.; Chen, B.; Yang, H.; Kong, S.; Hao, Y.; et al. A soft manipulator for efficient delicate grasping in shallow water: Modeling, control, and real-world experiments. Int. J. Robot. Res. 2021, 40, 449–469. [Google Scholar] [CrossRef]
- Jiang, Y.; Chen, D.; Liu, C.; Li, J. Chain-Like Granular Jamming: A Novel Stiffness-Programmable Mechanism for Soft Robotics. Soft Robot. 2019, 6, 118–132. [Google Scholar] [CrossRef] [PubMed]
- Anwar, M.; Khawli, T.A.; Hussain, I.; Gan, D.; Renda, F. Modeling and prototyping of a soft closed-chain modular gripper. Ind. Robot 2019, 46, 135–145. [Google Scholar] [CrossRef]
- Glick, P.; Suresh, S.A.; Ruffatto, D.; Cutkosky, M.; Tolley, M.T.; Parness, A. A Soft Robotic Gripper With Gecko-Inspired Adhesive. IEEE Robot. Autom. Lett. 2018, 3, 903–910. [Google Scholar] [CrossRef]
- Zhu, Y.L.; Gong, W.Z.; Chu, K.M.; Wang, X.; Hu, Z.Q.; Su, H.J. A Novel Wearable Soft Glove for Hand Rehabilitation and Assistive Grasping. Sensors 2022, 22, 6294. [Google Scholar] [CrossRef] [PubMed]
- Pei, G.; Yu, M.; Xu, Y.; Ma, C.; Lai, H.; Chen, F.; Lin, H. An Improved PID Controller for the Compliant Constant-Force Actuator Based on BP Neural Network and Smith Predictor. Appl. Sci. 2021, 11, 2685. [Google Scholar] [CrossRef]
- Li, Y.; Cao, Y.; Jia, F. A Neural Network Based Dynamic Control Method for Soft Pneumatic Actuator with Symmetrical Chambers. Actuators 2021, 10, 112. [Google Scholar] [CrossRef]
- Chavoshian, M.; Taghizadeh, M.; Mazare, M. Hybrid dynamic neural network and PID control of pneumatic artificial muscle using the PSO algorithm. Int. J. Autom. Comput. 2020, 17, 428–438. [Google Scholar] [CrossRef]
- Bourbonnais, F.; Bigras, P.; Bonev, I.A. Minimum-time trajectory planning and control of a pick-and-place five-bar parallel robot. IEEE ASME Trans. Mechatron. 2014, 20, 740–749. [Google Scholar] [CrossRef]
- Wang, D.; Wang, L.; Wu, J. Physics-based mechatronics modeling and application of an industrial-grade parallel tool head. Mech. Syst. Signal Process. 2021, 148, 107158. [Google Scholar] [CrossRef]
- Song, J.; Si, P.; Hua, H.; Qiu, M. Research on the Inherent Nonlinearity Calibration of the Potentiometer of a Miniature Linear Series Elastic Actuator. Actuators 2022, 11, 207. [Google Scholar] [CrossRef]
- Hua, H.; Liao, Z.; Wu, X.; Chen, Y.; Feng, C. A Back-drivable Linear Force Actuator for Adaptive Grasping. J. Mech. Sci. Technol. 2022, 36, 4213–4220. [Google Scholar] [CrossRef]
- Hua, H.; Liao, Z.; Song, J.; Liu, Y. A Sparse Piecewise Calibration Method for Potentiometer with Inherent Nonlinearity: A Comparison Study. Measurement 2022, 204, 112033. [Google Scholar] [CrossRef]
- Hua, H.; Liao, Z.; Wu, X.; Chen, Y. A Bezier based state calibrating method for low-cost potentiometer with inherent nonlinearity. Measurement 2021, 178, 109325. [Google Scholar] [CrossRef]
- Hua, H.; Liao, Z.; Chen, Y. A 1-Dof bidirectional graspable finger mechanism for robotic gripper. J. Mech. Sci. Technol. 2020, 34, 4735–4741. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Zhao, M.; Hua, H. A 1-DOF Modular Robotic Hand Inspired by Human Two-Arm Cooperative Handling Strategy. Actuators 2023, 12, 151. https://doi.org/10.3390/act12040151
Liu Y, Zhao M, Hua H. A 1-DOF Modular Robotic Hand Inspired by Human Two-Arm Cooperative Handling Strategy. Actuators. 2023; 12(4):151. https://doi.org/10.3390/act12040151
Chicago/Turabian StyleLiu, Yuhang, Maocheng Zhao, and Hongliang Hua. 2023. "A 1-DOF Modular Robotic Hand Inspired by Human Two-Arm Cooperative Handling Strategy" Actuators 12, no. 4: 151. https://doi.org/10.3390/act12040151
APA StyleLiu, Y., Zhao, M., & Hua, H. (2023). A 1-DOF Modular Robotic Hand Inspired by Human Two-Arm Cooperative Handling Strategy. Actuators, 12(4), 151. https://doi.org/10.3390/act12040151