

Hybrid Inspection Robot for Indoor and Outdoor Surveys



Abstract
1. Introduction
2. Mechatronics of the Hybrid Rover
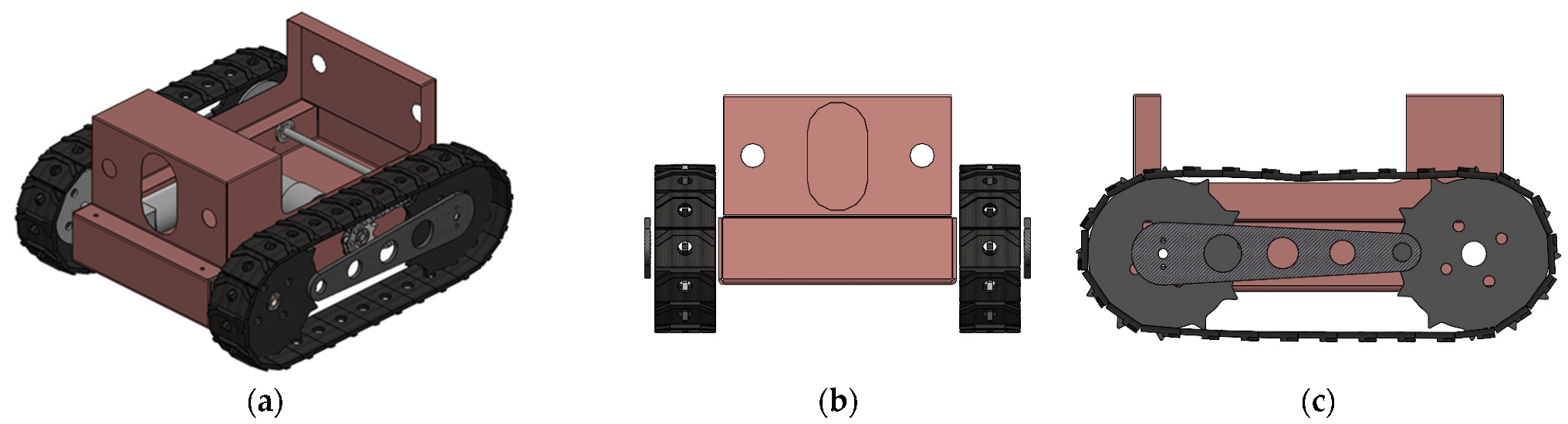
2.1. 3D Model and Prototype
- From the kinematic point of view, the mechanical system should be able to move and avoid and/or overpass obstacles during the survey, being able to make as many adaptations related to the environment as possible.
- The mechanical architecture must have a certain load capacity, in order that tools and equipment can be installed as needed during the application.
- The architecture should be light and compact, being easy to carry/transport/operate.
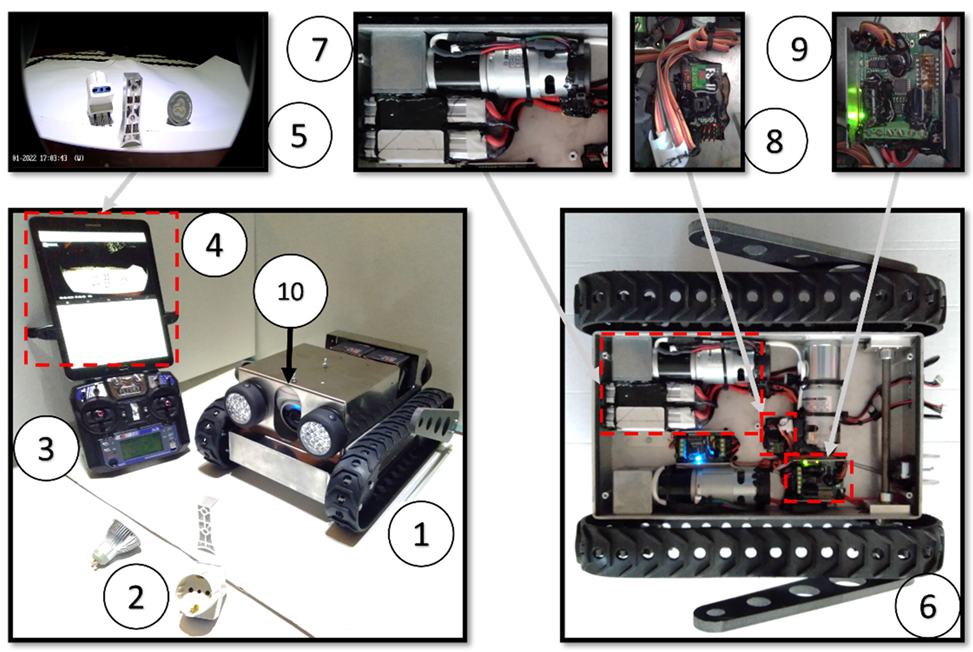
2.2. Actuation, Sensorization and Control
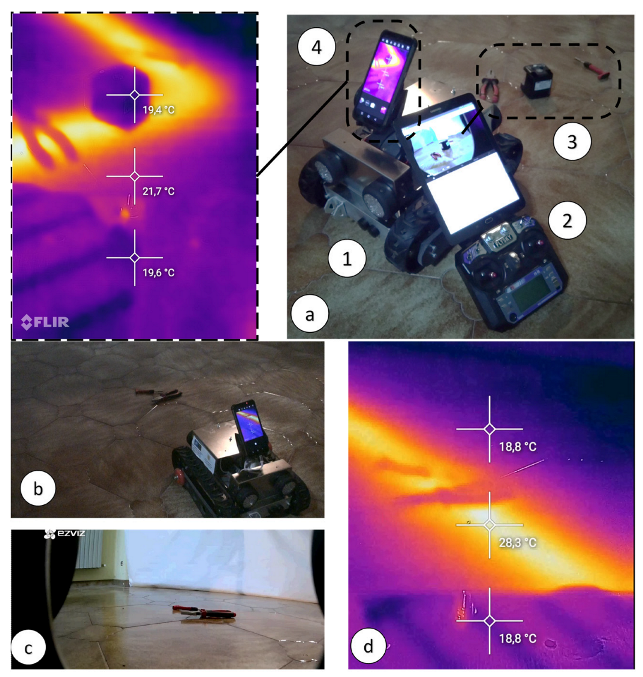
3. Simulation and Experimental Tests
4. Discussion about the Results
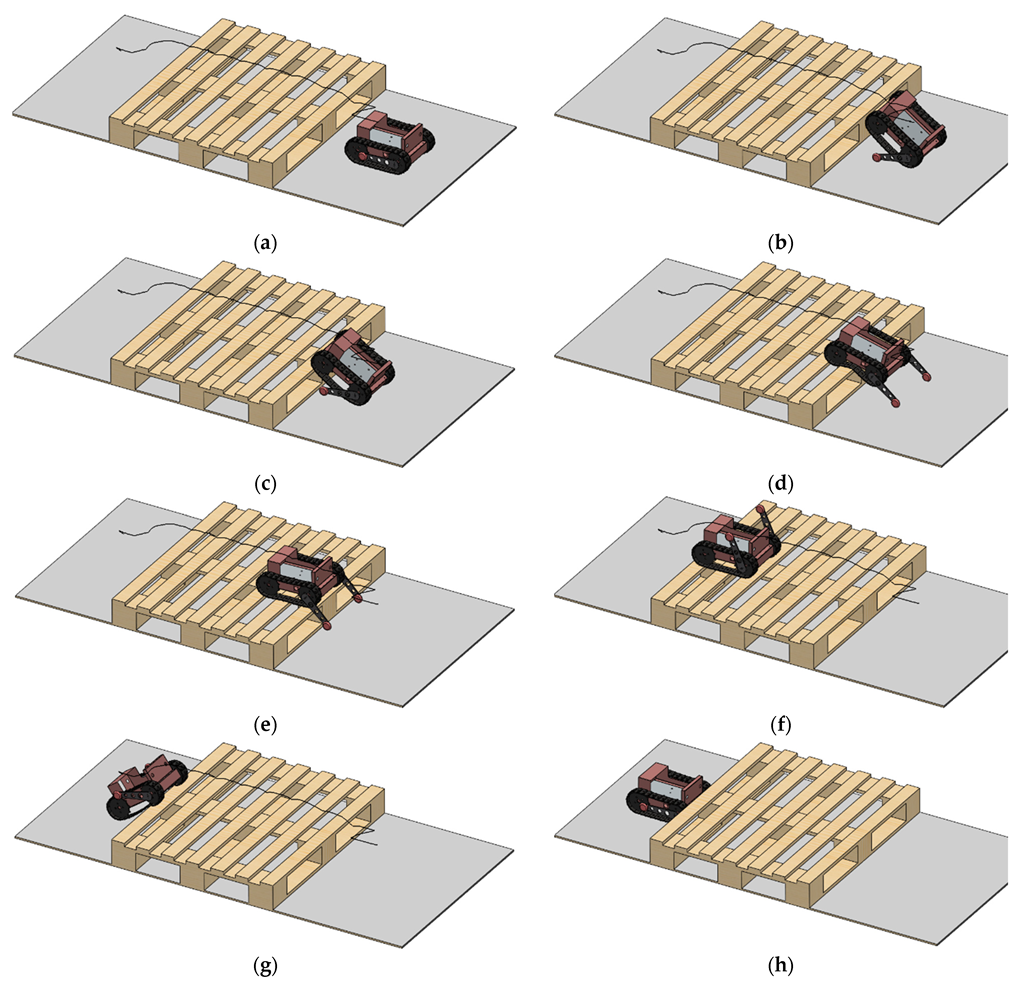
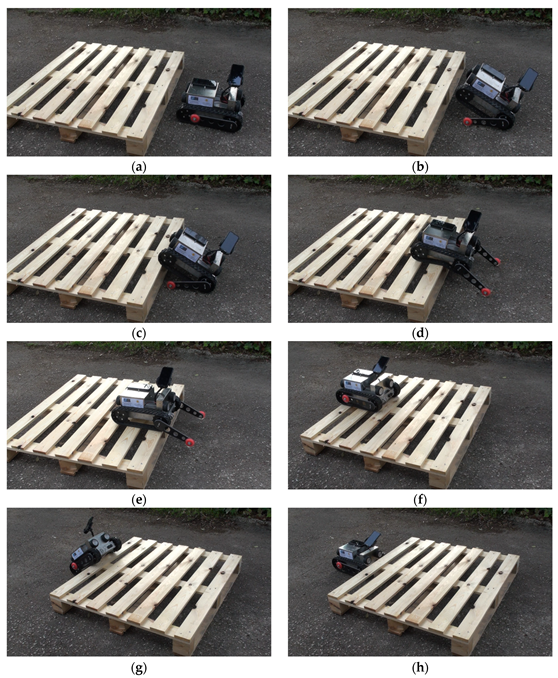
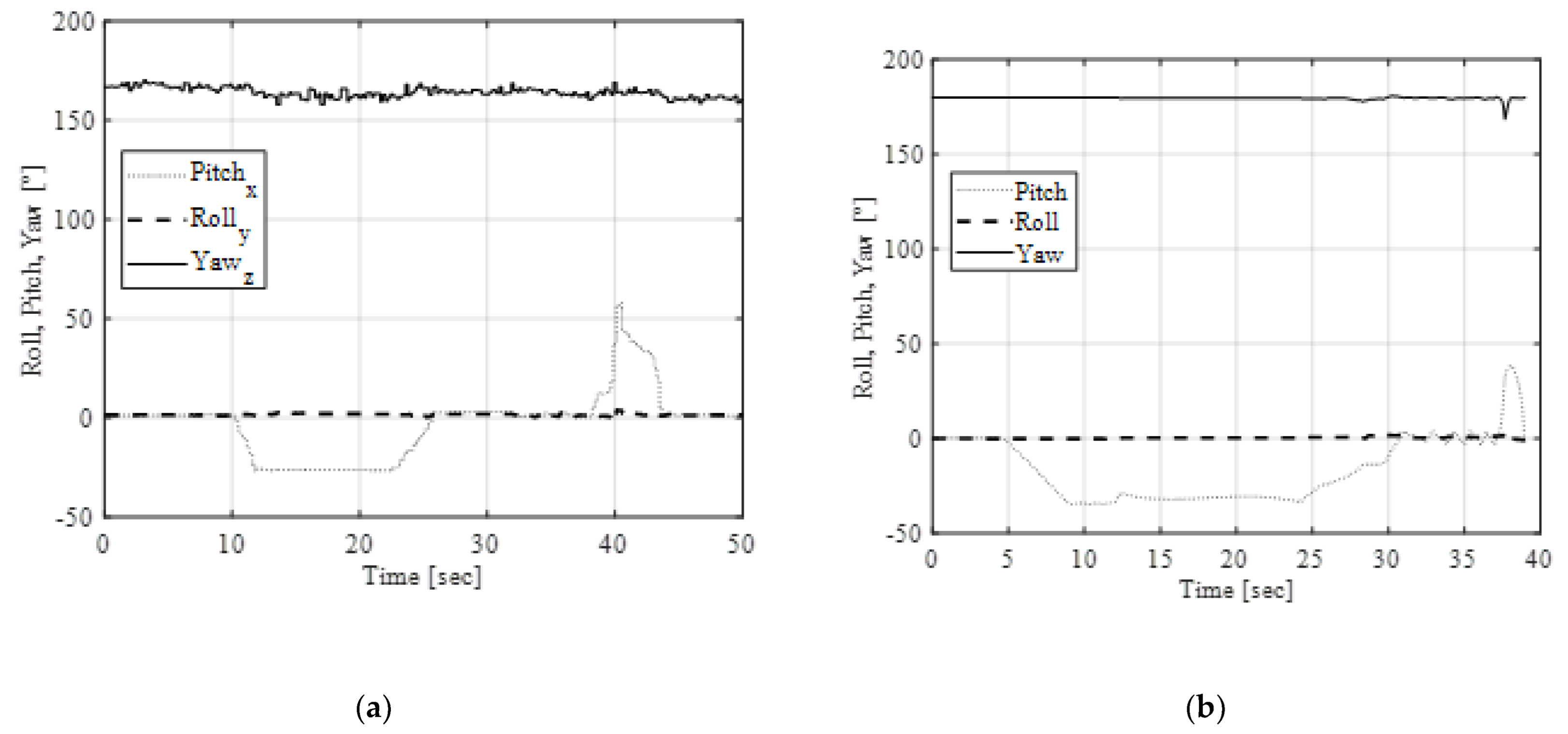
- Phase 1: 0 ÷ 4 s, approach to the obstacle, the tracks only are active;
- Phase 2: 4 ÷ 9 s, the legs rotate clockwise to lift the robot;
- Phase 3: 9 ÷ 13 s, the robot moves forward until the tracks begin contact with the pallet;
- Phase 4; 13 ÷ 24 s, the legs rotate counterclockwise to lift the robot. The robot lifts and move a little bit forward;
- Phase 5; 24 ÷ 31.5 s, the robot advances with its legs lowered and climbs completely onto the pallet;
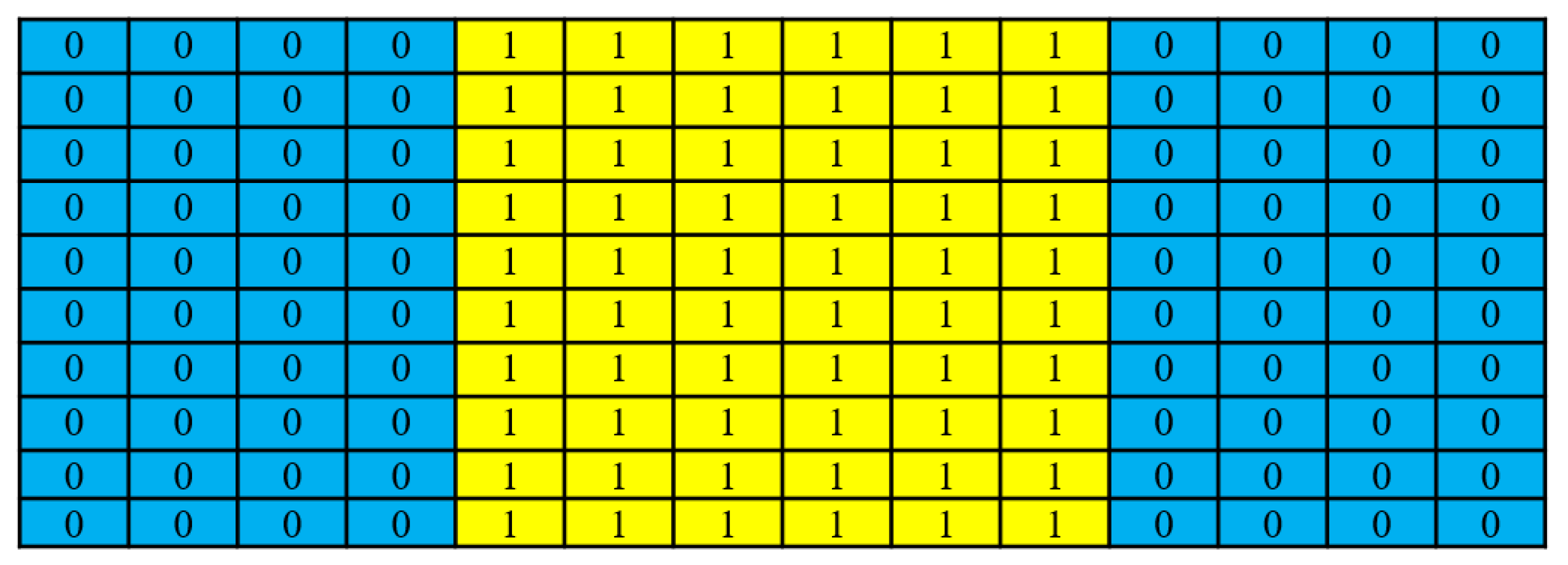
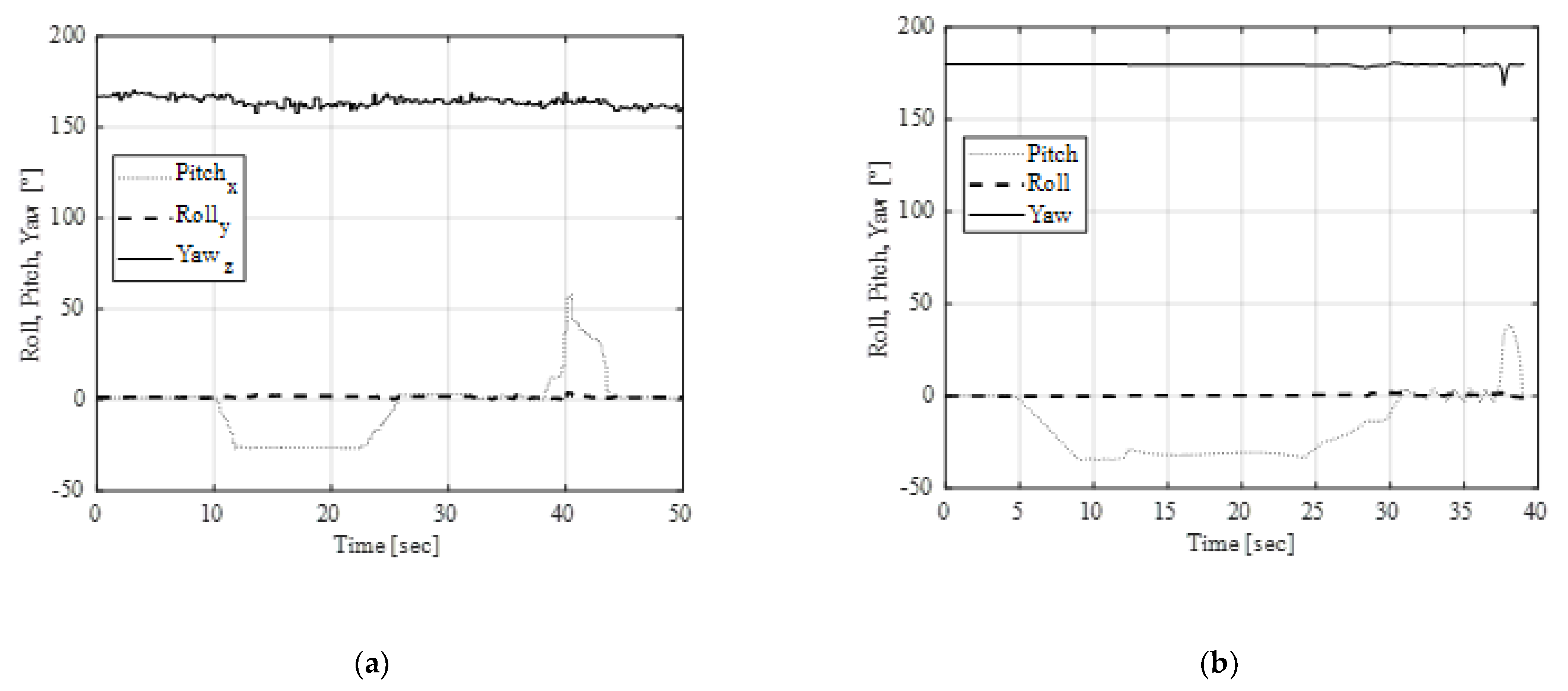
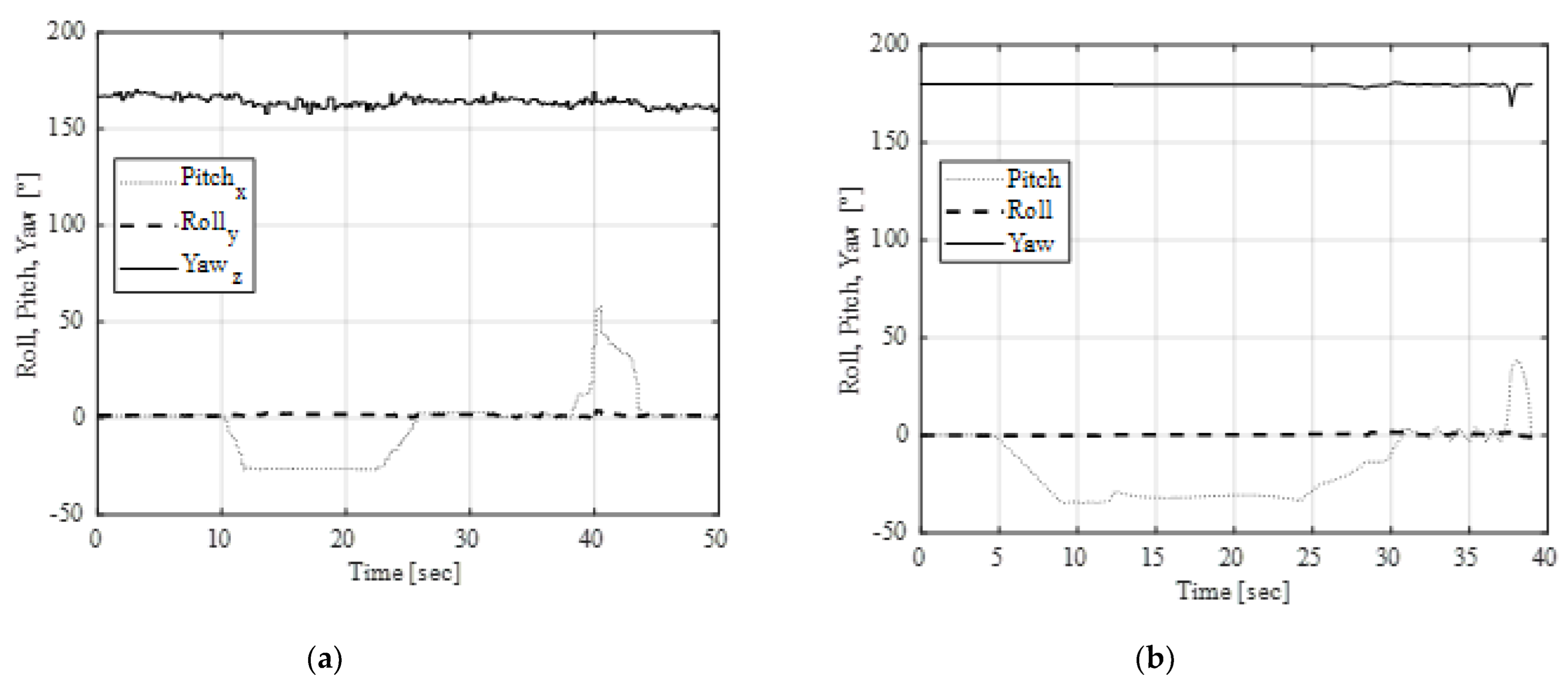
- Phase 6; 31 ÷ 36 s, the robot negotiates with the five slopes that can be recognized by the five peaks;
- Phase 7; 36 ÷ 38 s, the robot moves forward and descends from the pallet;
- Phase 8; 38 ÷ 39.5 s, the robot descends completely from the pallet.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bruzzone, L.; Baggetta, M.; Nodehi, S.E.; Bilancia, P.; Fanghella, P. Functional Design of a Hybrid Leg-Wheel-Track Ground Mobile Robot. Machines 2021, 9, 10. [Google Scholar] [CrossRef]
- Muthugala, M.A.V.J.; Palanisamy, P.; Samarakoon, S.M.B.P.; Padmanabha, S.G.A.; Elara, M.R.; Terntzer, D.N. Raptor: A Design of a Drain Inspection Robot. Sensors 2021, 21, 5742. [Google Scholar] [CrossRef] [PubMed]
- Sprenger, M.; Mettler, T. Service Robots. Bus. Inf. Syst. Eng. 2015, 57, 271–274. [Google Scholar] [CrossRef]
- Gonzalez-Aguirre, J.A.; Osorio-Oliveros, R.; Rodríguez-Hernández, K.L.; Lizárraga-Iturralde, J.; Morales Menendez, R.; Ramírez-Mendoza, R.A.; Ramírez-Moreno, M.A.; Lozoya-Santos, J.d.J. Service Robots: Trends and Technology. Appl. Sci. 2021, 11, 10702. [Google Scholar] [CrossRef]
- Sibanyoni, S.V.; Ramotsoela, D.T.; Silva, B.J.; Hancke, G.P. A 2-D Acoustic Source Localization System for Drones in Search and Rescue Missions. IEEE Sens. J. 2019, 19, 332–341. [Google Scholar] [CrossRef]
- Habibian, S.; Dadvar, M.; Peykari, B.; Hosseini, A.; Salehzadeh, M.H.; Hosseini, A.H.; Najafi, F. Design and implementation of a maxi-sized mobile robot (Karo) for rescue missions. Robomech J. 2021, 8, 1. [Google Scholar] [CrossRef]
- Sharifzadeh, S.; Biro, I.; Lohse, N.; Kinnell, P. Abnormality detection strategies for surface inspection using robot mounted laser scanners. Mechatronics 2018, 51, 59–74. [Google Scholar] [CrossRef]
- Bellingham, J.G.; Rajan, K. Robotics in Remote and Hostile Environments. Science 2007, 318, 1098. [Google Scholar] [CrossRef]
- Shapovalov, D.; Pereira, G.A.S. Tangle-Free Exploration with a Tethered Mobile Robot. Remote Sens. 2020, 12, 3858. [Google Scholar] [CrossRef]
- Acaccia, G.M.; Michelini, R.C.; Molfino, R.M.; Razzoli, R.P. Mobile robots in greenhouse cultivation: Inspection and treatment of plants. In Proceedings of the ASER 2003, 1st International Workshop on Advances in Service Robotics, Bardolino, Italy, 2003. [Google Scholar]
- Amici, C.; Ceresoli, F.; Saponi, M.; Pasetti, M.; Zanoni, S.; Borboni, A.; Tiboni, M.; Faglia, R. Experimental Characterization of an Electrical Propulsion Unit for Service UAVs. In Proceedings of I4SDG Workshop 2021: IFToMM for Sustainable Development Goals; Springer International Publishing: Midtown Manhattan, NY, USA, 2022; Volume 108 MMS, pp. 307–314. [Google Scholar] [CrossRef]
- Amici, C.; Ceresoli, F.; Pasetti, M.; Saponi, M.; Tiboni, M.; Zanoni, S. Review of propulsion system design strategies for unmanned aerial vehicles. Appl. Sci. 2021, 11, 5209. [Google Scholar] [CrossRef]
- SmpRobotics. Available online: https://smprobotics.com/ (accessed on 12 January 2023).
- Vong, C.H.; Ryan, K.; Chung, H. Trajectory tracking control of quadcopters under tunnel effects. Mechatronics 2021, 78, 102628. [Google Scholar] [CrossRef]
- Pelliccio, A.; Ottaviano, E.; Rea, P. Digital and Mechatronic Technologies Applied to the Survey of Brownfields. In Chapter 27 in Handbook of Research on Emerging Digital Tools for Architectural Surveying, Modeling, and Representation; Brusaporci, S., IGI Global, Eds.; IGI Global: Hershey, PA, USA, 2015; pp. 813–829. ISBN 978-146668380-8. [Google Scholar] [CrossRef]
- Figliolini, G.; Rea, P.; Conte, M. Mechanical design of a novel biped climbing and walking robot. CISM International Centre for Mechanical Sciences. Courses Lect. 2010, 524, 199–206. [Google Scholar]
- Ramezani, M.; Brandao, M.; Casseau, B.; Havoutis, I.; Fallon, M. Legged Robots for Autonomous Inspection and Monitoring of Offshore Assets. In Proceedings of the Paper Presented at the Offshore Technology Conference, Houston, TX, USA, 4 May 2020. [Google Scholar] [CrossRef]
- ANYbotics. Available online: https://www.anybotics.com/ (accessed on 5 January 2023).
- Boston Dynamics. Available online: https://www.bostondynamics.com/products/spot (accessed on 8 January 2023).
- Ottaviano, E.; Rea, P.; Castelli, G. THROO: A Tracked Hybrid Rover to Overpass Obstacles. Adv. Robot. 2014, 28, 683–694. [Google Scholar] [CrossRef]
- Rea, P.; Ottaviano, E. Design and Development of an Inspection Robotic System for Indoor Applications. Robot. Comput. Integr. Manuf. 2018, 49, 143–151. [Google Scholar] [CrossRef]
- Rea, P.; Pelliccio, A.; Ottaviano, E.; Saccucci, M. The Heritage Management and Preservation Using the Mechatronic Survey. Int. J. Archit. Herit. 2017, 11, 1121–1132. [Google Scholar] [CrossRef]
- Ottaviano, E.; Rea, P. Design and operation of a 2-DOF leg-wheel hybrid robot. Robotica 2013, 31, 1319–1325. [Google Scholar] [CrossRef]
- Ngo, H.Q.T.; Cao Tri, H.; Tu, N.T.; Bao, D.N.T.; Anh Duy, P.L.; Phat, K.M.; Duy, T.A.; Tin, N.T. Design of reconfigurable mechanism for underactuated robot in the grounded applications. Cogent Eng. 2022, 9, 1. [Google Scholar] [CrossRef]
- Granosik, G.; Borenstein, J.; Hansen, M.G. Serpentine Robots for Industrial Inspection and Surveillance. In Industrial Robotics—Programming, Simulation and Applications; Kin Huat, L., Ed.; Literatur Verlag: Munich, Germany, 2007; pp. 633–662. [Google Scholar]
- Maurtua, I.; Susperregi, L.; Fernández, A.; Tubío, C.; Perez, C.; Rodríguez, J.; Felsch, T.; Ghrissi, M. MAINBOT-mobile robots for inspection and maintenance in extensive industrial plants. Energy Procedia 2014, 49, 1810–1819. [Google Scholar] [CrossRef]
- Van Den Bos, B.; Strand, J.; Mallion, A.; Oetiker, M.; Schler, A.; Black, T.; Potnis, P. Robotic Inspection Solutions for Petrochemical Pressure Vessels, developed and tested in the PETROBOT project. In Proceedings of the 19th World Conference on Non-Destructive Testing, Munich, Germany, 13–17 June 2016; p. 20121. [Google Scholar]
- Gargade, A.; Ohol, S. Design and Development of In-Pipe Inspection Robot. Am. Int. J. Res. Sci. Technol. Eng. Math. 2016, 15, 104–109. [Google Scholar]
- Wickramanayake, S.; Thiyagarajan, K.; Kodagoda, S.; Piyathilaka, L. Ultrasonic thickness measuring in-pipe robot for real-time non-destructive evaluation of polymeric spray linings in drinking water pipe infrastructure. Mechatronics 2022, 88, 102913. [Google Scholar] [CrossRef]
- Canali, C.; Pistone, A.; Guardiani, P.; Ludovico, D.; Leggieri, S.; Gloriani, C.; Caldwell, D.G. Inspection Robotics for Harsh Environments. Industrial Applications and Infrastructures; I-RIM: Genova, Italy, 2020. [Google Scholar]
- Lindqvist, B.; Karlsson, S.; Koval, A.; Tevetzidis, I.; Haluška, J.; Kanellakis, C.; Agha-mohammadi, A.; Nikolakopoulos, G. Multimodality robotic systems: Integrated combined legged-aerial mobility for subterranean search-and-rescue. Robot. Auton. Syst. 2022, 154, 104134. [Google Scholar] [CrossRef]
- Figliolini, G.; Rea, P. Effects of the design parameters on the synthesis of Geneva mechanisms. Proc. Inst. Mech. Engineers. PART C J. Mech. Eng. Sci. 2012, 227, 2000–2009. [Google Scholar] [CrossRef]
- Rea, P.; Ottaviano, E. Functional Design for Customizing Sit-To-Stand Assisting Devices. J. Bionic Eng. 2018, 15, 83–93. [Google Scholar] [CrossRef]
- Valigi, M.C.; Logozzo, S.; Meli, E.; Rindi, A. New Instrumented Trolleys and A Procedure for Automatic 3D Optical Inspection of Railways. Sensors 2020, 20, 2927. [Google Scholar] [CrossRef]
- Paziewska, J.; Rzonca, A. Integration of Thermal and RGB Data Obtained by Means of a Drone for Interdisciplinary Inventory. Energies 2022, 15, 4971. [Google Scholar] [CrossRef]
- Yang, M.-D.; Su, T.-C.; Lin, H.-Y. Fusion of Infrared Thermal Image and Visible Image for 3D Thermal Model Reconstruction Using Smartphone Sensors. Sensors 2018, 18, 2003. [Google Scholar] [CrossRef]
- Figliolini, G.; Rea, P. Mechatronic Design and Experimental Validation of a Novel Robotic Hand. Ind. Robot. Int. J. 2014, 41, 98–108. [Google Scholar] [CrossRef]
- Sorli, M.; Figliolini, G.; Pastorelli, S.; Rea, P. Experimental identification and validation of a pneumatic positioning servo-system. In Power Transmission and Motion Control PTMC 2005; John Wiley & Sons, Ltd.: Bath, UK, 2005; pp. 365–378. [Google Scholar]
- Ceccarelli, M.; Ottaviano, E.; Galvagno, M. A 3-DOF Parallel Manipulator as Earthquake Motion Simulator. In Proceedings of the 7th International Conference on Control, Automation, Robotics and Vision, ICARCV 2002, Singapore, 2–5 December 2002; pp. 944–949. [Google Scholar]
- Ottaviano, E.; Ceccarelli, M.; De Ciantis, M. A 4-4 Cable-Based Parallel Manipulator for an Application in Hospital Environment. In Proceedings of the 15th Mediterranean Conference on Control and Automation—MED07, Athens, Greece, 27–29 June 2007. [Google Scholar]
- Castelli, G.; Ottaviano, E.; Rea, P. A Cartesian Cable-Suspended Robot for improving end-users’ mobility in an urban environment. Robot. Comput. Integr. Manuf. 2014, 30, 335–343. [Google Scholar] [CrossRef]
- Jacoff, A.; Messina, E.; Weiss, B.A.; Tadokoro, S.; Nakagawa, Y. Test Arenas and Performance Metrics for Urban Search and Rescue Robots. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA; 2003; Volume 4, pp. 3396–3403. [Google Scholar]
- Jacoff, A.; Downs, A.; Virts, A.; Messina, E. Stepfield pallets: Repeatable terrain for evaluating robot mobility. In Proceedings of the Performance Metrics for Intelligent Systems Workshop (PerMIS), Gaithersburg, MD, USA, 19–21 August 2008; pp. 29–34. [Google Scholar] [CrossRef]
- Gonzalez-Rodriguez, A.; Castillo-Garcia, F.J.; Ottaviano, E.; Rea, P.; Gonzalez-Rodriguez, A.G. On the effects of the design of cable-Driven robots on kinematics and dynamics models accuracy. Mechatronics 2017, 43, 18–27. [Google Scholar] [CrossRef]
- Nagarajan, B.; Li, Y.; Sun, Z.Y.; Qin, R.W. A routing algorithm for inspecting grid transmission system using suspended robot: Enhancing cost-effective and energy efficient infrastructure maintenance. J. Clean. Prod. 2019, 219, 622–638. [Google Scholar] [CrossRef]
- Hoeft, M.; Pieper, M.; Eriksson, K.; Bargstädt, H.-J. Toward Life Cycle Sustainability in Infrastructure: The Role of Automation and Robotics in PPP Projects. Sustainability 2021, 13, 3779. [Google Scholar] [CrossRef]
- Yang, H.; Ding, L.; Gao, H.; Wang, Z.; Lan, Q.; Liu, G.; Liu, Z.; Li, W.; Deng, Z. High-Fidelity Dynamic Modeling and Simulation of Planetary Rovers Using Single-Input-Multi-Output Joints With Terrain Property Mapping. IEEE Trans. Robot. 2022, 38, 3238–3258. [Google Scholar] [CrossRef]
- Mejia, G.; Montes de Oca, A.; Flores, G. Strawberry localization in a ridge planting with an autonomous rover. Eng. Appl. Artif. Intell. 2023, 119, 105810. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item Description | Specification | |
|---|---|---|
| Robot system hybrid robot | Size (LxHxW) | 355 × 300 × 407 mm |
| Mass | 7.5 kg | |
| Max speed | Up to 0.6 m/s | |
| Actuation (tracks) | 24VDC 122 rpm torque = 1.47 Nm | |
| Actuation (legs) | 24VDC 47 rpm torque = 1.96 Nm | |
| DOFs | 3 (4) | |
| Payload | up to 7 kg | |
| Internal Sensor | ||||
|---|---|---|---|---|
| Item Description | Specification | |||
| Type of sensor | Model type | Resolution | Max peak | Power cons. |
| Accelerometer | QTI Ver.2 | 0.002 m/s2 | 156 m/s2 | 1.2 mA |
| Gyroscope sensor | BMI160-Bosh | 0.00106 rad/s | 17.45 rad/s | 0.9 |
| Gravity sensor | QTI Ver.2 | 0.00239 m/s2 | 156.9 m/s2 | 1.07 mA |
| Magnetometer | AKM-09918-Ver1 | 0.149 μT | 4911.99 μT | 1.1 mA |
| Lin. accel. sensor | QTI Ver.2 | 0.00239 m/s2 | 156.9 m/s2 | 1.07 mA |
| External Sensor | ||||
| Item description | Specification | |||
| Thermal camera (FLIR) | 48MP + 5MP Thermal Imagery FLIR | |||
| Front–rear camera (Sony) | 48MP + 19MP type | |||
| Communication | ||||
| Item description | Specification | |||
| WiFi router (Ethernet/Lan) | TP-LINK Model TL-WN821N | |||
| AR6210 DSMX | Spektrum Receiver Mk610 | |||
| Control station | ||||
| Item description | Specification | |||
| HMI interface/Remote-controller | Tablet 10” -Samsung | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rea, P.; Ottaviano, E. Hybrid Inspection Robot for Indoor and Outdoor Surveys. Actuators 2023, 12, 108. https://doi.org/10.3390/act12030108
Rea P, Ottaviano E. Hybrid Inspection Robot for Indoor and Outdoor Surveys. Actuators. 2023; 12(3):108. https://doi.org/10.3390/act12030108
Chicago/Turabian StyleRea, Pierluigi, and Erika Ottaviano. 2023. "Hybrid Inspection Robot for Indoor and Outdoor Surveys" Actuators 12, no. 3: 108. https://doi.org/10.3390/act12030108
APA StyleRea, P., & Ottaviano, E. (2023). Hybrid Inspection Robot for Indoor and Outdoor Surveys. Actuators, 12(3), 108. https://doi.org/10.3390/act12030108