
Data-Driven Nonlinear Iterative Inversion Suspension Control


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
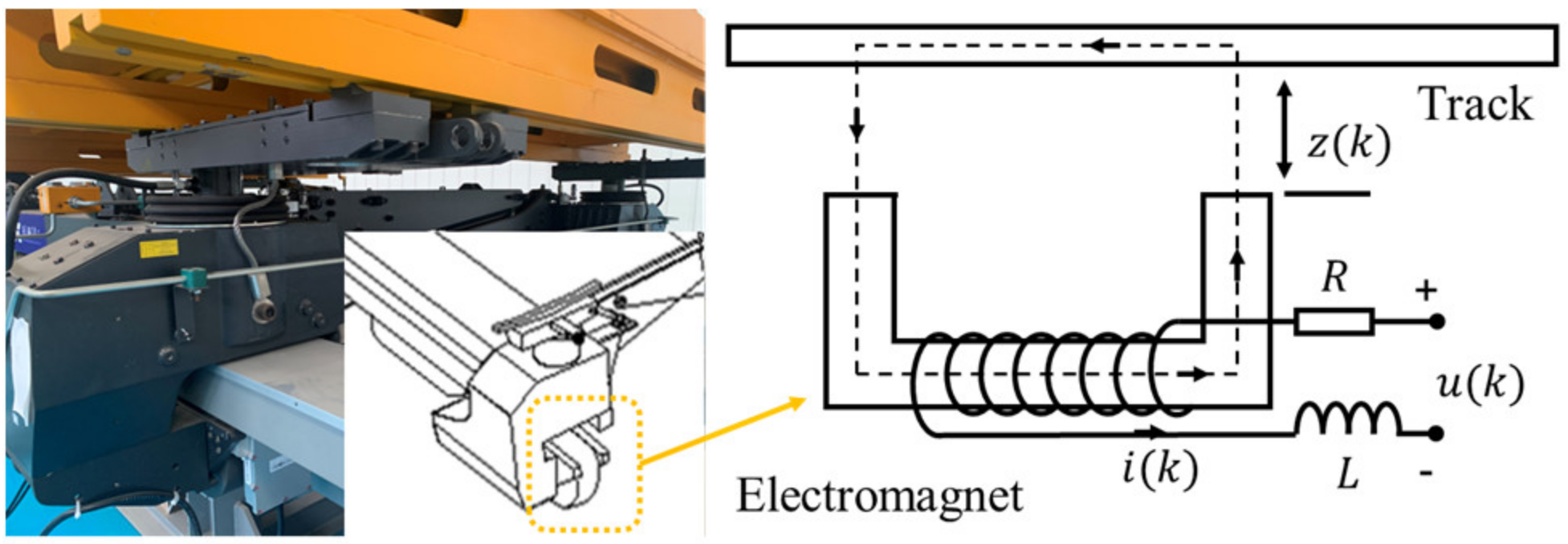
2. Maglev Control Problem Description
- (1)
- The control input of the suspension system is limited (input saturation problem), mainly including the limitation of the output duty cycle of the suspension chopper and the limitation of the input current of the suspension controller. Working for a long time with an excessive current will cause the suspension electromagnet to overheat, which may affect the safe operation of the maglev train in serious cases.
- (2)
- The state of the maglev train suspension system is also limited. According to the structure of the suspension frame of the medium and low speed maglev train, the suspension gap in normal operation needs to be maintained at 8–12 mm.
- (3)
- Considering the actual operation of the maglev train, such as lifting, lowering, ramps and curves, the control of the suspension system needs to ensure passenger comfort on the maglev train during lifting and lowering, as well as the safe operation of the maglev train on ramps and curves under the influence of track irregularity.
- (4)
- Because the mileage of the maglev operation line is limited, the running time of the maglev train is limited, and the actual control performance of the maglev train cannot be guaranteed by the levitation control algorithm that requires the running time to reach infinity to obtain the gradual convergence effect.
- (5)
- The dynamic model of the actual suspension system of the maglev train has high-order nonlinear characteristics, and there are a lot of unmodeled dynamics, which makes it impossible to obtain an accurate model of the suspension system. At the same time, because the components of the suspension system will age or even fail, and the mechanical components will wear or even break after the maglev train runs for a long time, the model of the suspension system will also change. This means that the suspension control of the maglev train cannot simply rely on the accurate system model.
3. Model Free Nonlinear Iterative Inverse Learning Control for Suspension System
3.1. Tracking Performance Conditions Based on Nonlinear IIL
3.2. Convergence Analysis
3.3. Data-Driven Nonlinear Iterative Inversion Suspension Control Algorithm
| Algorithm 1: Calculating ILC learning law based on time inversion | |
| S1 | Reverse the error signal . |
| S2 | Apply the reverse error signal to the system to obtain the output signal:. |
| S3 | Then reverse the output signal and multiply by a factor small enough:. |
| S4 | Finally, the learning law based on adjoint is:. |
| Algorithm 2: Data-driven nonlinear iterative inversion learning control based on time inversion | |
| S1 | Initialize, select system initial input: , . |
| S2 | Apply input to the system to obtain output , and then calculate the tracking error of the system. If the tracking error is small enough and within the acceptable range, stop the iterative learning process or go to the next step. |
| S3 | If , go to step 4, otherwise go to step 5. |
| S4 | Execute the ILC based on time inversion, , and then let . Go to step 2 for execution. |
| S5 | Discrete Fourier transform is used to obtain frequency domain signals and . |
| S6 | Then combine learning gain function and obtain according to Equation (11). Finally, perform IDFT to obtain time domain , and then turn to step 2 for to execute. |
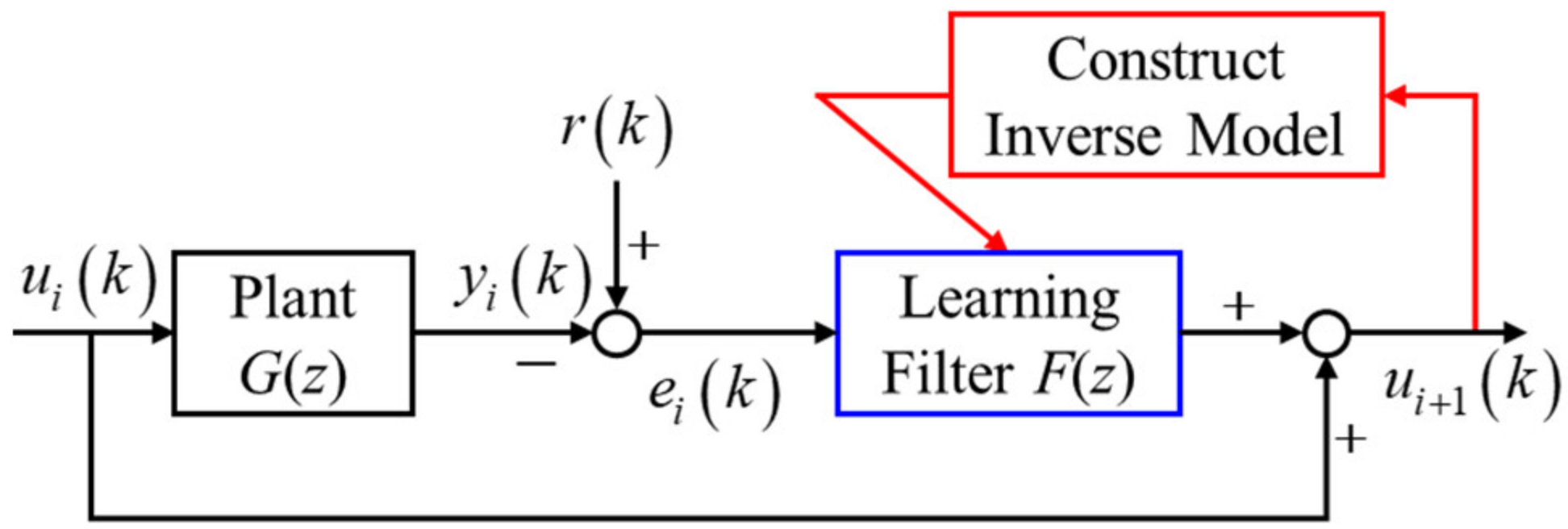
| Algorithm 3: Update learning filter | |
| S1 | Initialize the reference pulse signal to . Execute the algorithm initialization in Algorithm 2. |
| S2 | Perform the algorithm iteration update steps in Algorithm 2. |
| S3 | Construct the inverse model as . |
| S4 | Finally, the updated learning filter is replaced by the inverse model. |
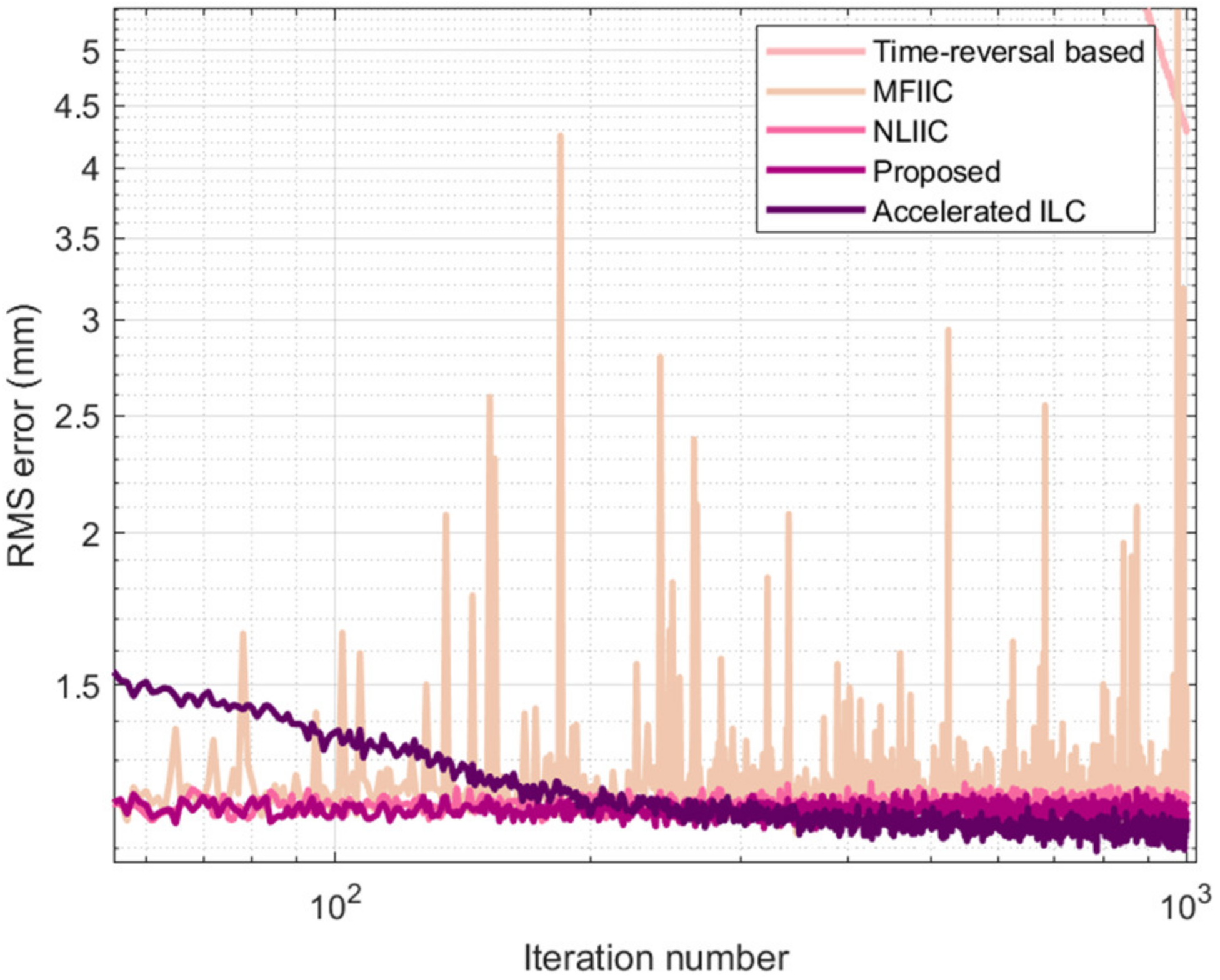
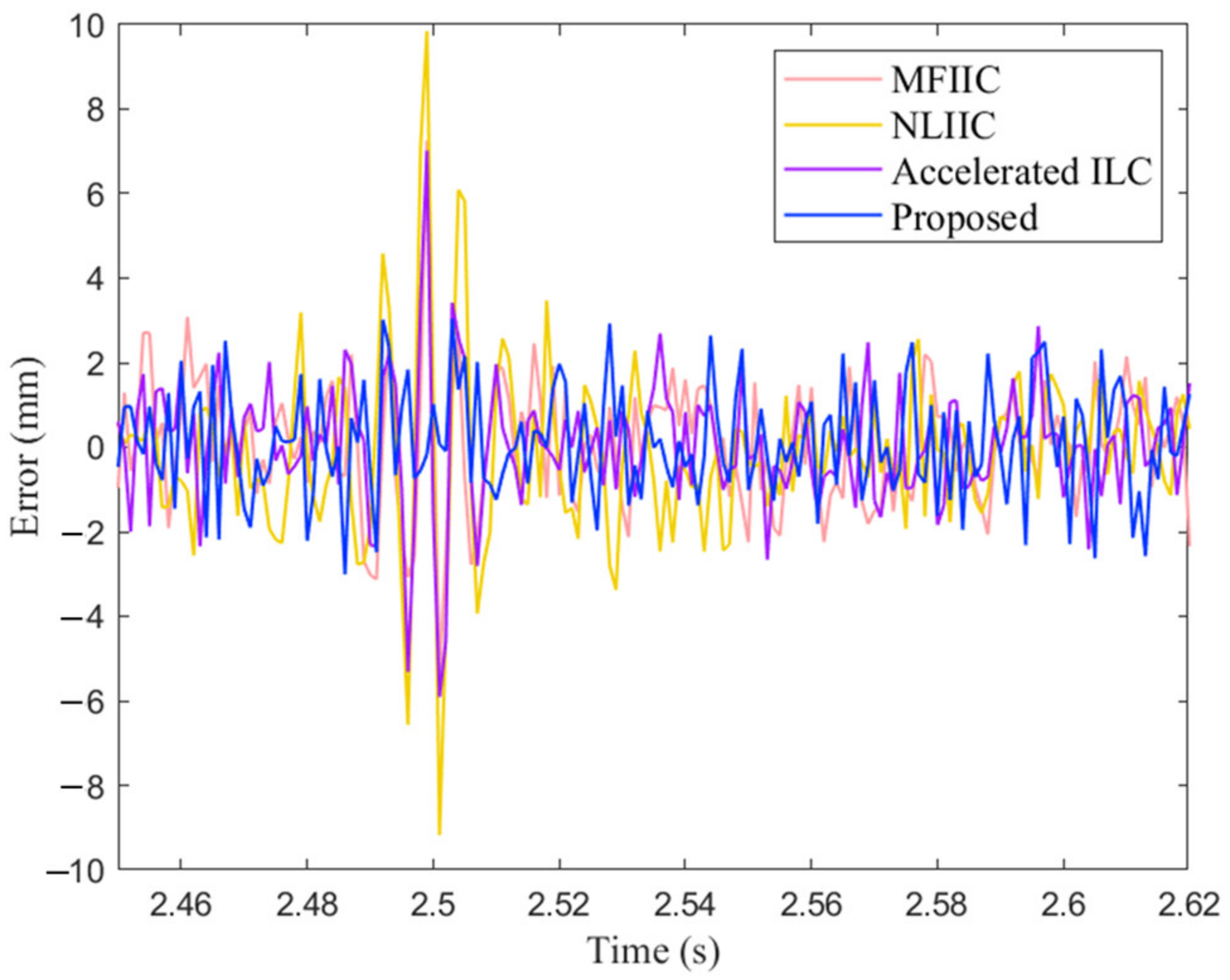
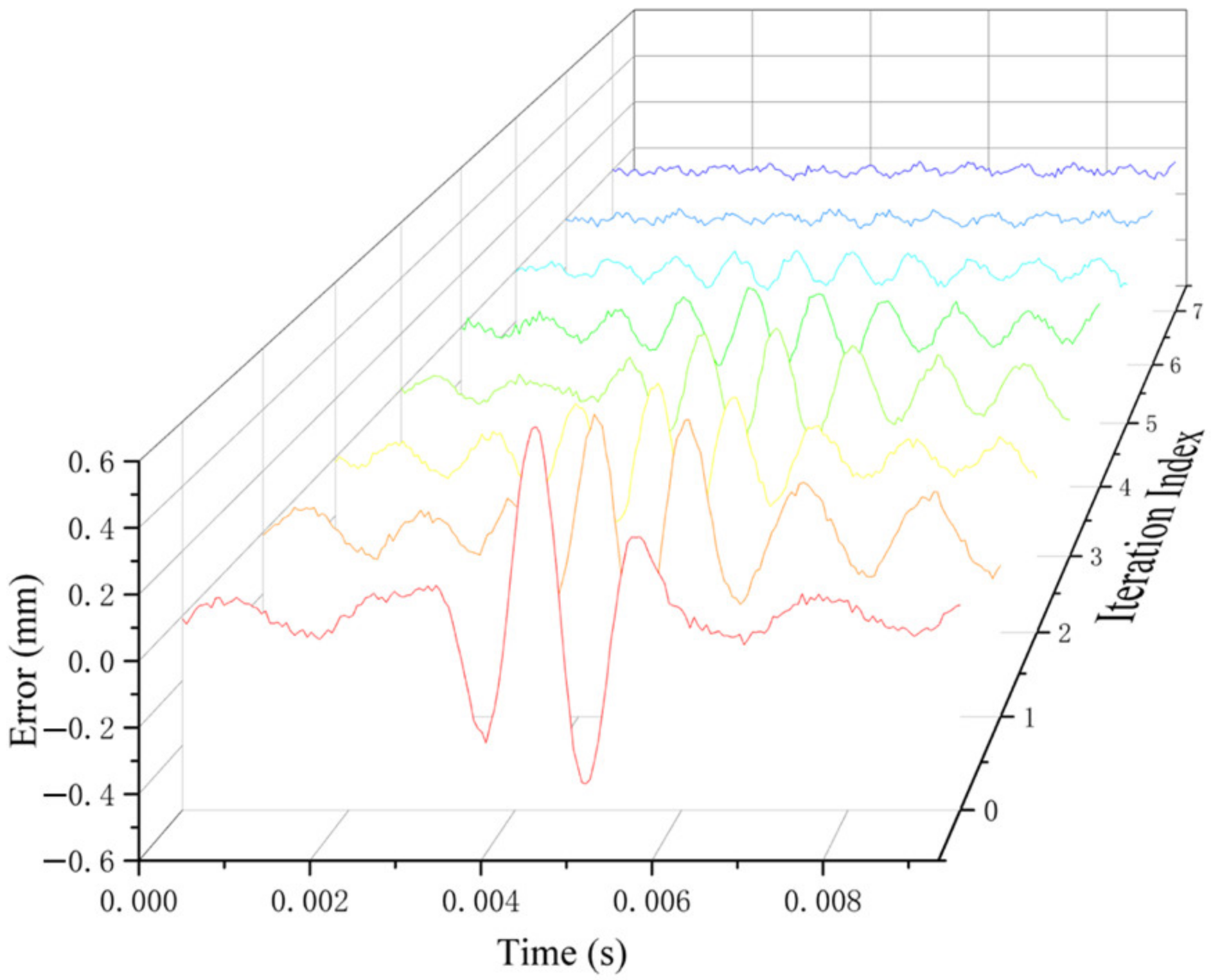
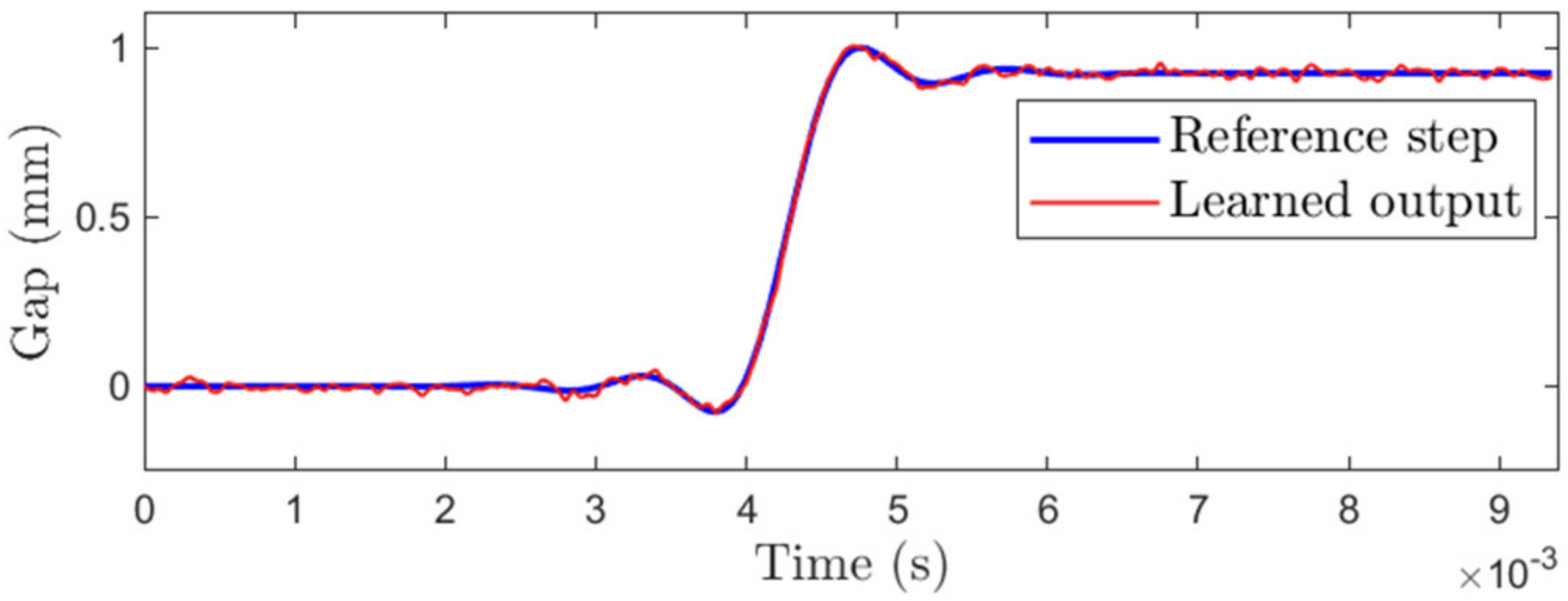
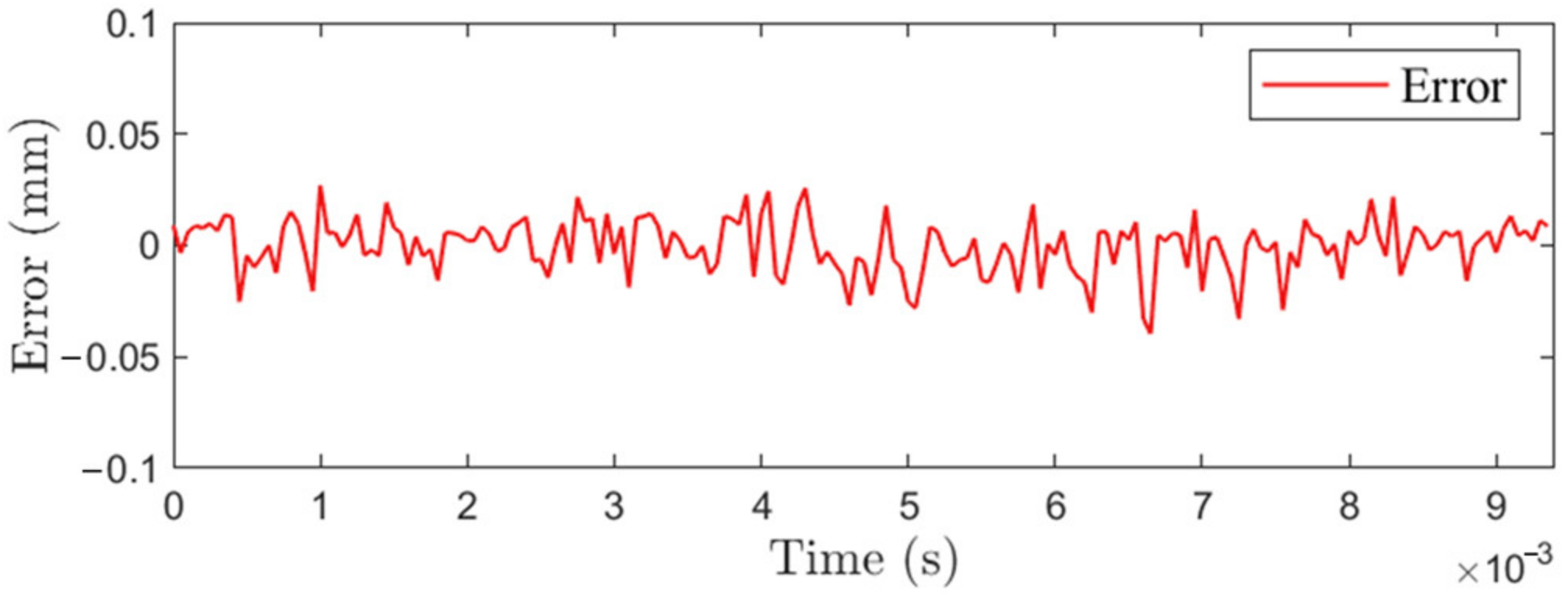
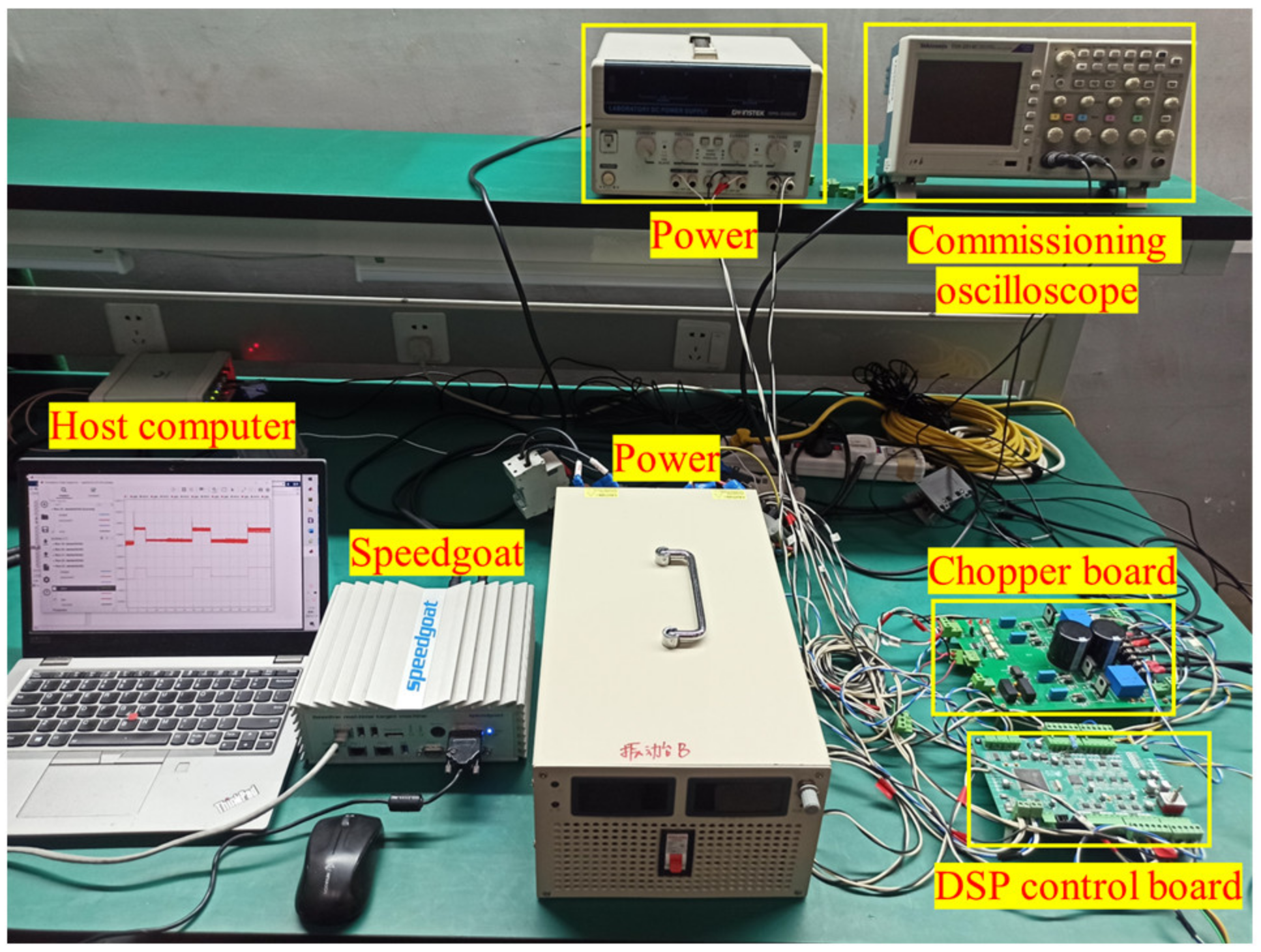
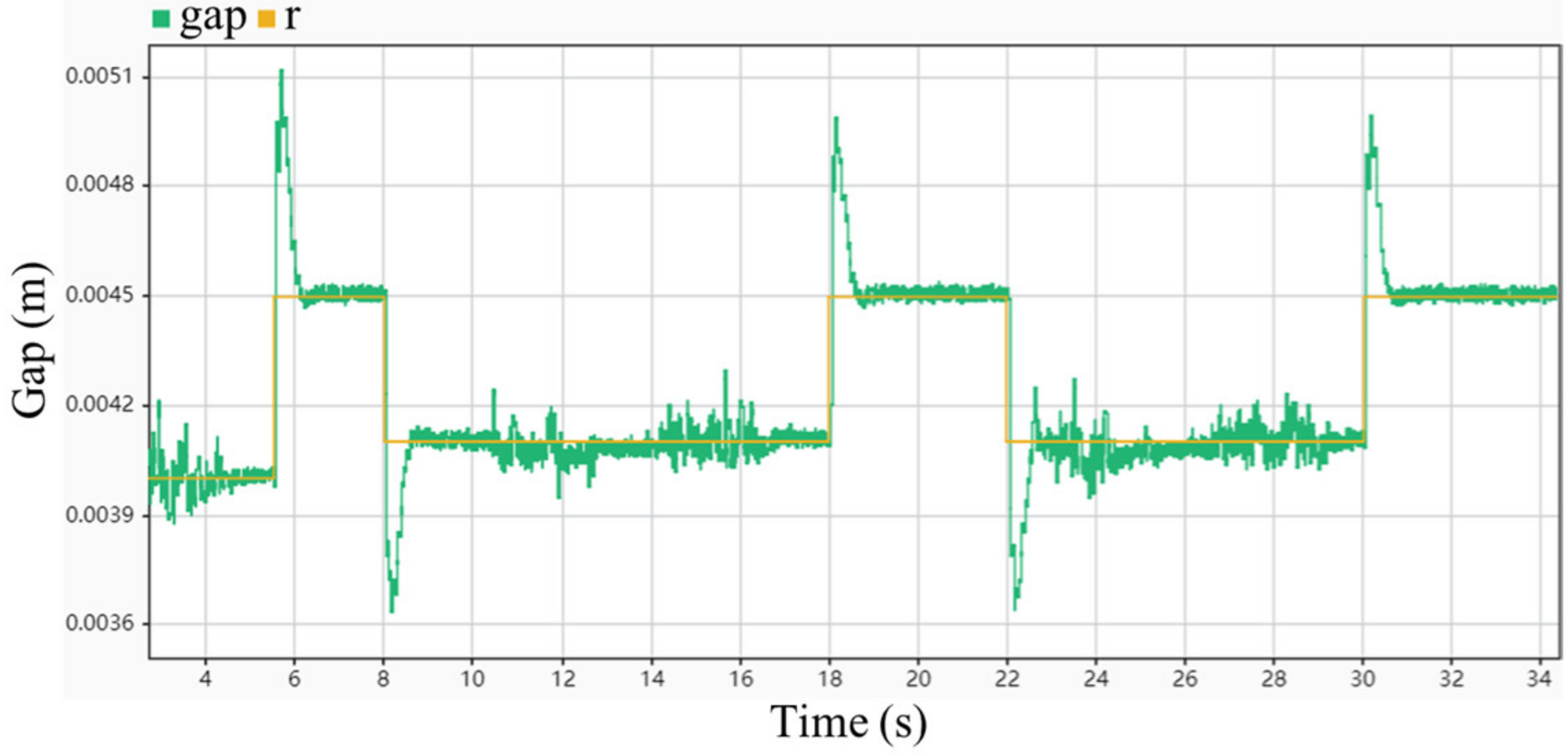
4. Suspension Control Experiment and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hara, S.; Yamamoto, Y.; Omata, T.; Nakano, M. Repetitive control system: A new type servo system for periodic exogenous signals. IEEE Trans. Autom. Control. 1988, 33, 659–668. [Google Scholar] [CrossRef]
- Teng, K.T.; Tsao, T.C. A comparison of inversion based iterative learning control algorithms. In Proceedings of the 2015 American Control Conference, Chicago, IL, USA, 1–3 July 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 3564–3569. [Google Scholar]
- Van Zundert, J.; Oomen, T. On inversion-based approaches for feedforward and ILC. Mechatronics 2018, 50, 282–291. [Google Scholar] [CrossRef]
- Lee, K.S.; Bang, S.H.; Chang, K.S. Feedback-assisted iterative learning control based on an inverse process model. J. Process Control 1994, 4, 77–89. [Google Scholar] [CrossRef]
- Kinosita, K.; Sogo, T.; Adachi, N. Iterative learning control using adjoint systems and stable inversion. Asian J. Control 2002, 4, 60–67. [Google Scholar] [CrossRef]
- De Roover, D.; Bosgra, O.H. Synthesis of robust multivariable iterative learning controllers with application to a wafer stage motion system. Int. J. Control. 2000, 73, 968–979. [Google Scholar] [CrossRef]
- Amann, N.; Owens, D.H.; Rogers, E.; Wahl, A. An H∞ approach to linear iterative learning control design. Int. J. Adapt. Control Signal Process. 1996, 10, 767–781. [Google Scholar] [CrossRef]
- Hou, Z.S.; Wang, Z. From model-based control to data-driven control: Survey, classification and perspective. Inf. Sci. 2013, 235, 3–35. [Google Scholar] [CrossRef]
- Chi, R.; Huang, B.; Wang, D.; Zhang, R.; Feng, Y. Data-driven optimal terminal iterative learning control with initial value dynamic compensation. IET Control Theory Appl. 2016, 10, 1357–1364. [Google Scholar] [CrossRef]
- Chi, R.; Wang, D.; Hou, Z.; Jin, S. Data-driven optimal terminal iterative learning control. J. Process Control 2012, 22, 2026–2037. [Google Scholar] [CrossRef]
- Bolder, J.; Kleinendorst, S.; Oomen, T. Data-driven multivariable ILC: Enhanced performance by eliminating L and Q filters. Int. J. Robust Nonlinear Control 2018, 28, 3728–3751. [Google Scholar] [CrossRef]
- Janssens, P.; Pipeleers, G.; Swevers, J. Model-free iterative learning control for LTI systems and experimental validation on a linear motor test setup. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 4287–4292. [Google Scholar]
- Kim, K.S.; Zou, Q. A modeling-free inversion-based iterative feedforward control for precision output tracking of linear time-invariant systems. IEEE/ASME Trans. Mechatron. 2012, 18, 1767–1777. [Google Scholar] [CrossRef]
- Janssens, P.; Pipeleers, G.; Swevers, J. A data-driven constrained norm-optimal iterative learning control framework for LTI systems. IEEE Trans. Control Syst. Technol. 2012, 21, 546–551. [Google Scholar] [CrossRef]
- Boeren, F.; Oomen, T.; Steinbuch, M. Iterative motion feedforward tuning: A data-driven approach based on instrumental variable identification. Control Eng. Pract. 2015, 37, 11–19. [Google Scholar] [CrossRef]
- Feng, Z.; Ling, J.; Ming, M.; Xiao, X. A model-data integrated iterative learning controller for flexible tracking with application to a piezo nanopositioner. Trans. Inst. Meas. Control 2018, 40, 3201–3210. [Google Scholar] [CrossRef]
- Wang, Z.; Zou, Q. A modeling-free differential-inversion-based iterative control approach to simultaneous hysteresis-dynamics compensation: High-speed large-range motion tracking example. In Proceedings of the 2015 American Control Conference, Chicago, IL, USA, 1–3 July 2015; IEEE: Piscataway, NJ, USA; pp. 3558–3563. [Google Scholar]
- Devasia, S. Iterative machine learning for output tracking. IEEE Trans. Control Syst. Technol. 2017, 27, 516–526. [Google Scholar] [CrossRef]
- Ito, S.; Yoo, H.W.; Schitter, G. Comparison of modeling-free learning control algorithms for galvanometer scanner’s periodic motion. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics, Munich, Germany, 3–7 July 2017; IEEE: Piscataway, NJ, USA; pp. 1357–1362. [Google Scholar]
- De Rozario, R.; Oomen, T. Data-driven iterative inversion-based control: Achieving robustness through nonlinear learning. Automatica 2019, 107, 342–352. [Google Scholar] [CrossRef]
- Bolder, J.; Oomen, T. Rational basis functions in iterative learning control—With experimental verification on a motion system. IEEE Trans. Control Syst. Technol. 2014, 23, 722–729. [Google Scholar] [CrossRef]
- Gao, X.; Mishra, S. An iterative learning control algorithm for portability between trajectories. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 3808–3813. [Google Scholar]
- Blanken, L.; Hazelaar, T.; Koekebakker, S.; Oomen, T. Multivariable repetitive control design framework applied to flatbed printing with continuous media flow. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control, Melbourne, Australia, 12–15 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 4727–4732. [Google Scholar]
- Moore, K.L. Iterative Learning Control for Deterministic Systems; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Devasia, S.; Chen, D.; Paden, B. Nonlinear inversion-based output tracking. IEEE Trans. Autom. Control 1996, 41, 930–942. [Google Scholar] [CrossRef]
- Zeng, G.; Hunt, L.R. Stable inversion for nonlinear discrete-time systems. IEEE Trans. Autom. Control 2000, 45, 1216–1220. [Google Scholar] [CrossRef]
- Chen, C.W.; Tsao, T.C. Accelerated convergence interleaving iterative learning control and inverse dynamics identification. IEEE Trans. Control Syst. Technol. 2021, 30, 45–56. [Google Scholar] [CrossRef]
- Blanken, L. Learning and Repetitive Control for Complex Systems: With Application to Large-Format Printers. Ph.D. Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, 2019. [Google Scholar]
- De Rozario, R. Data-Driven Learning Control for Complex Multivariable and Linear Parameter-Varying Systems. Ph.D. Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, 2020. [Google Scholar]
- Zhang, G.H.; Chen, C.W. On Improving Transient Behavior and Steady-State Performance of Model-free Iterative Learning Control. IFAC—Pap. 2020, 53, 1433–1438. [Google Scholar] [CrossRef]
- Chen, C.W.; Rai, S.; Tsao, T.C. Iterative learning of dynamic inverse filters for feedforward tracking control. IEEE/ASME Trans. Mechatron. 2019, 25, 349–359. [Google Scholar] [CrossRef]
- Long, Z.Q.; Hao, A.M.; Chang, W.S. Suspension controller design of maglev train considering the rail track periodical irregularity. J. Natl. Univ. Def. Technol. 2003, 025, 84–89. [Google Scholar]
- Havaei, P.; Sandidzadeh, M.A. Intelligent-PID controller design for speed track in automatic train operation system with heuristic algorithms. J. Rail Transp. Plan. Manag. 2022, 22, 100321. [Google Scholar] [CrossRef]
- Witanowski, Ł.; Breńkacz, Ł.; Szewczuk-Krypa, N.; Dorosińska-Komor, M.; Puchalski, B. Comparable analysis of PID controller settings in order to ensure reliable operation of active foil bearings. Eksploat. Niezawodn. 2022, 24, 377–385. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, T.; Zhou, X.; Li, X.; Long, Z. Data-Driven Nonlinear Iterative Inversion Suspension Control. Actuators 2023, 12, 68. https://doi.org/10.3390/act12020068
Wen T, Zhou X, Li X, Long Z. Data-Driven Nonlinear Iterative Inversion Suspension Control. Actuators. 2023; 12(2):68. https://doi.org/10.3390/act12020068
Chicago/Turabian StyleWen, Tao, Xu Zhou, Xiaolong Li, and Zhiqiang Long. 2023. "Data-Driven Nonlinear Iterative Inversion Suspension Control" Actuators 12, no. 2: 68. https://doi.org/10.3390/act12020068
APA StyleWen, T., Zhou, X., Li, X., & Long, Z. (2023). Data-Driven Nonlinear Iterative Inversion Suspension Control. Actuators, 12(2), 68. https://doi.org/10.3390/act12020068