
Handshake Feedback in a Haptic Glove Using Pouch Actuators



Abstract
1. Introduction
2. Design of Pouch Gloves
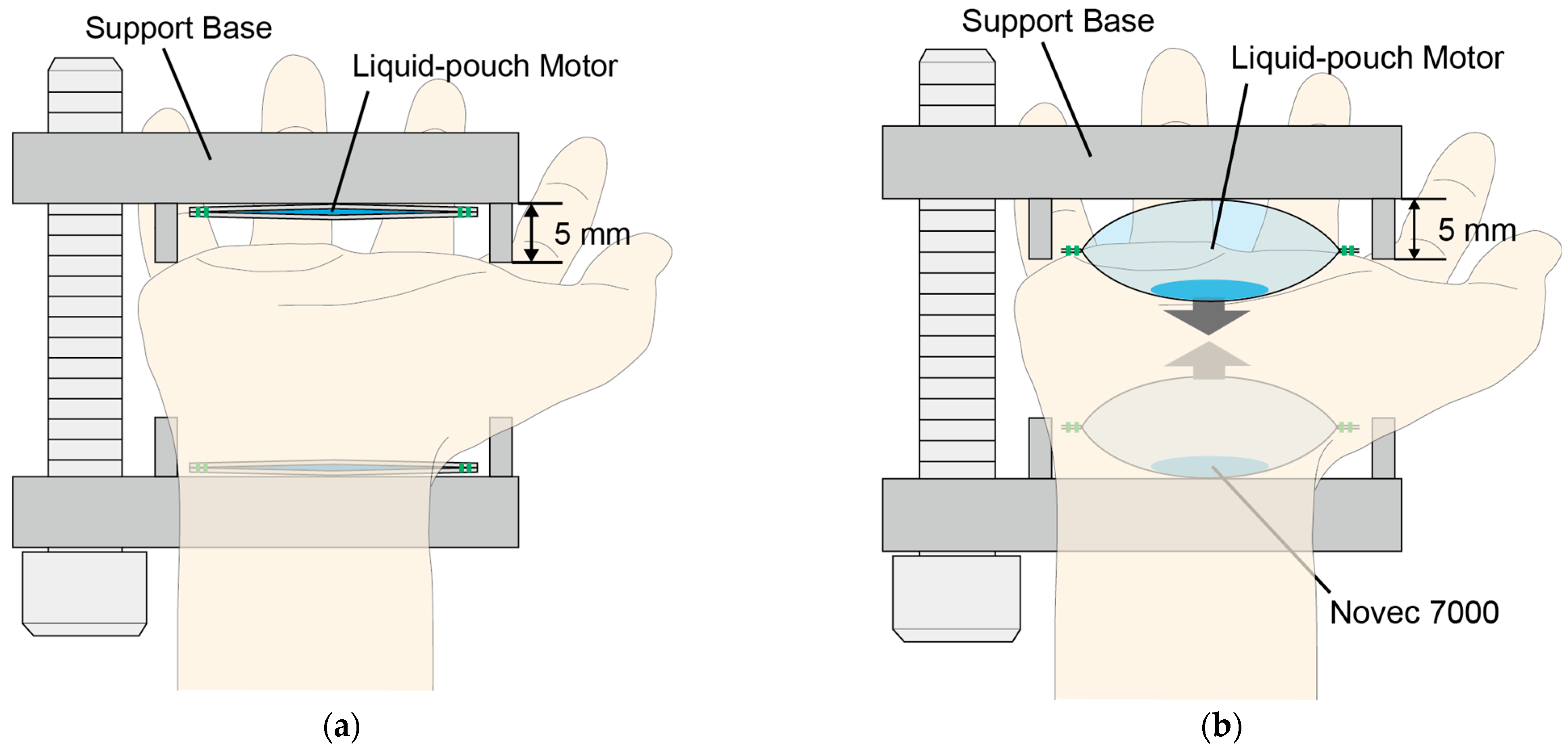
2.1. Pouch Actuator
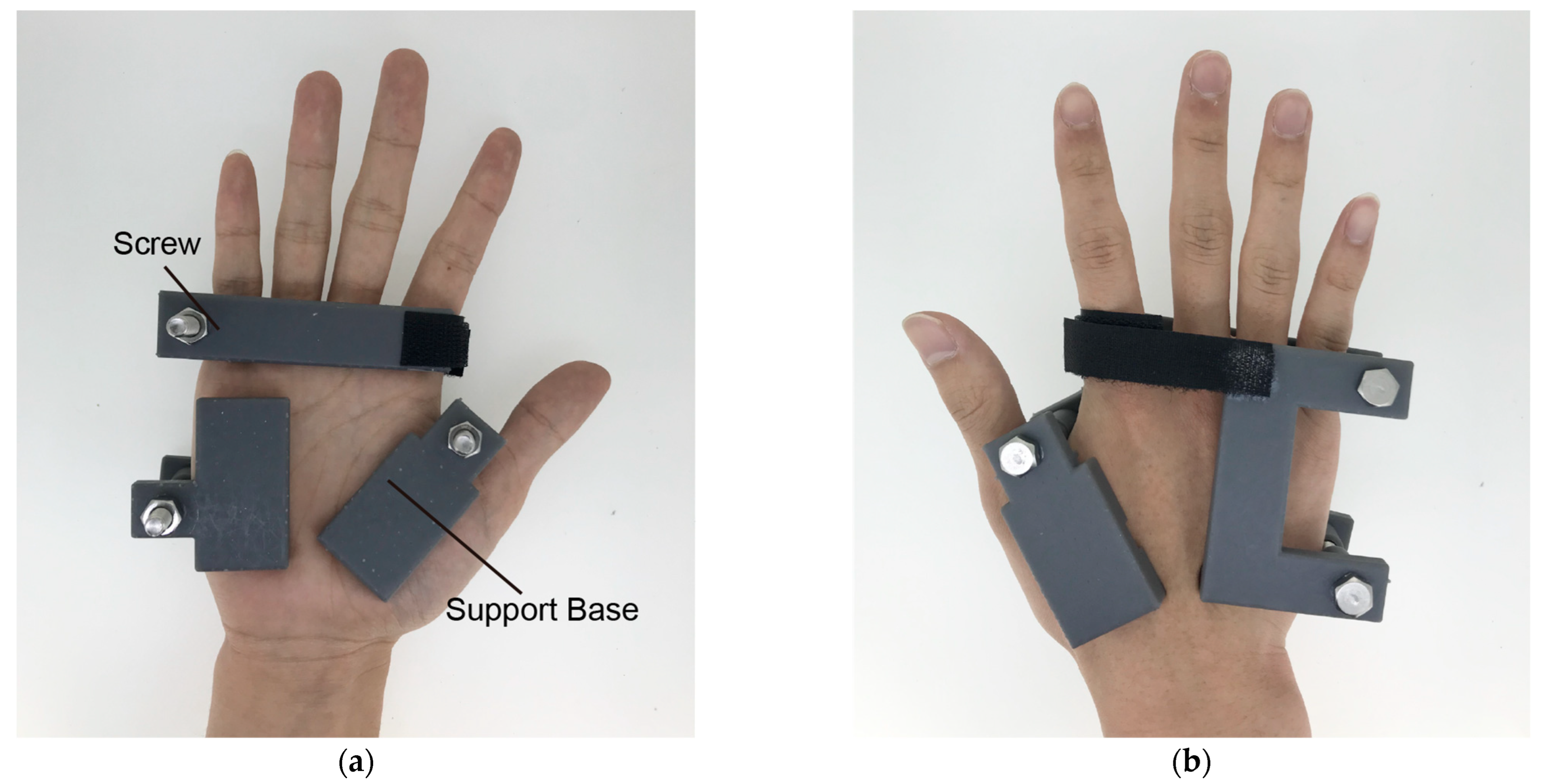
2.2. Overall Design of Haptic Glove
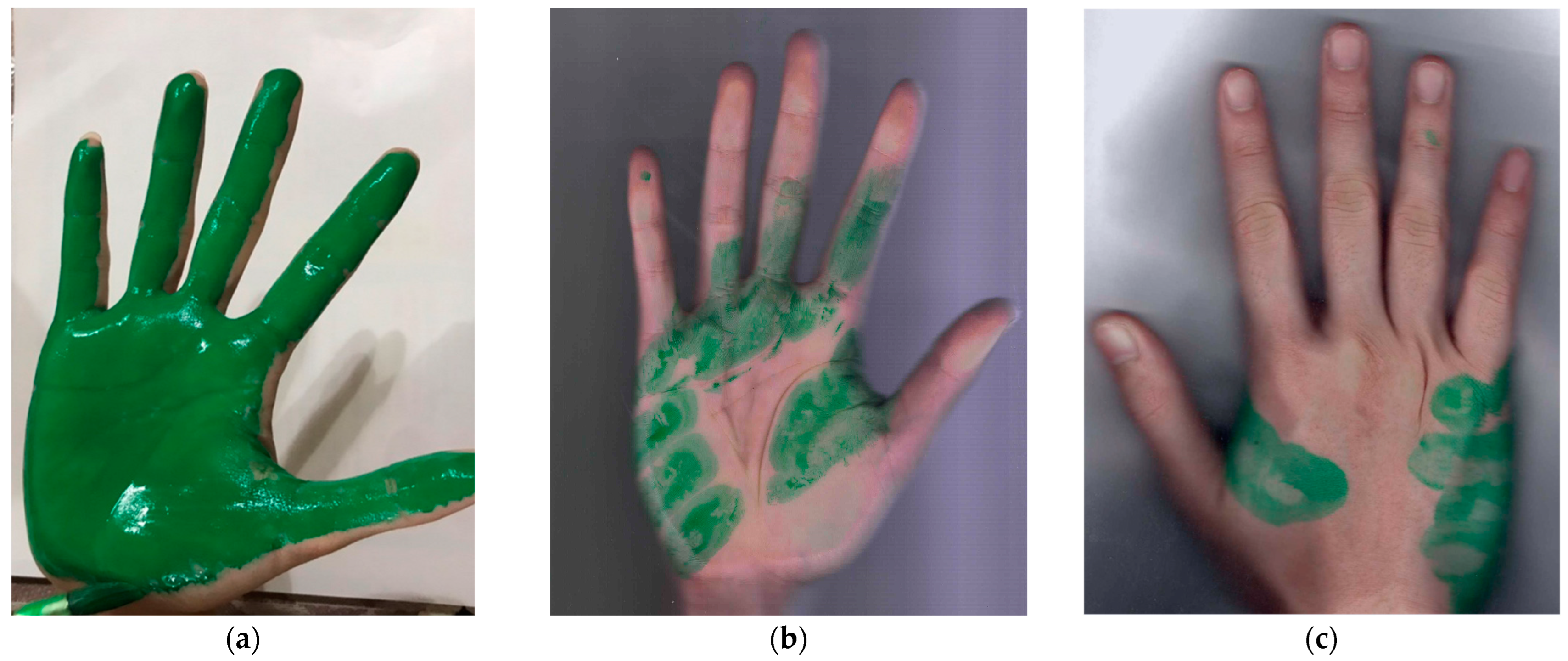
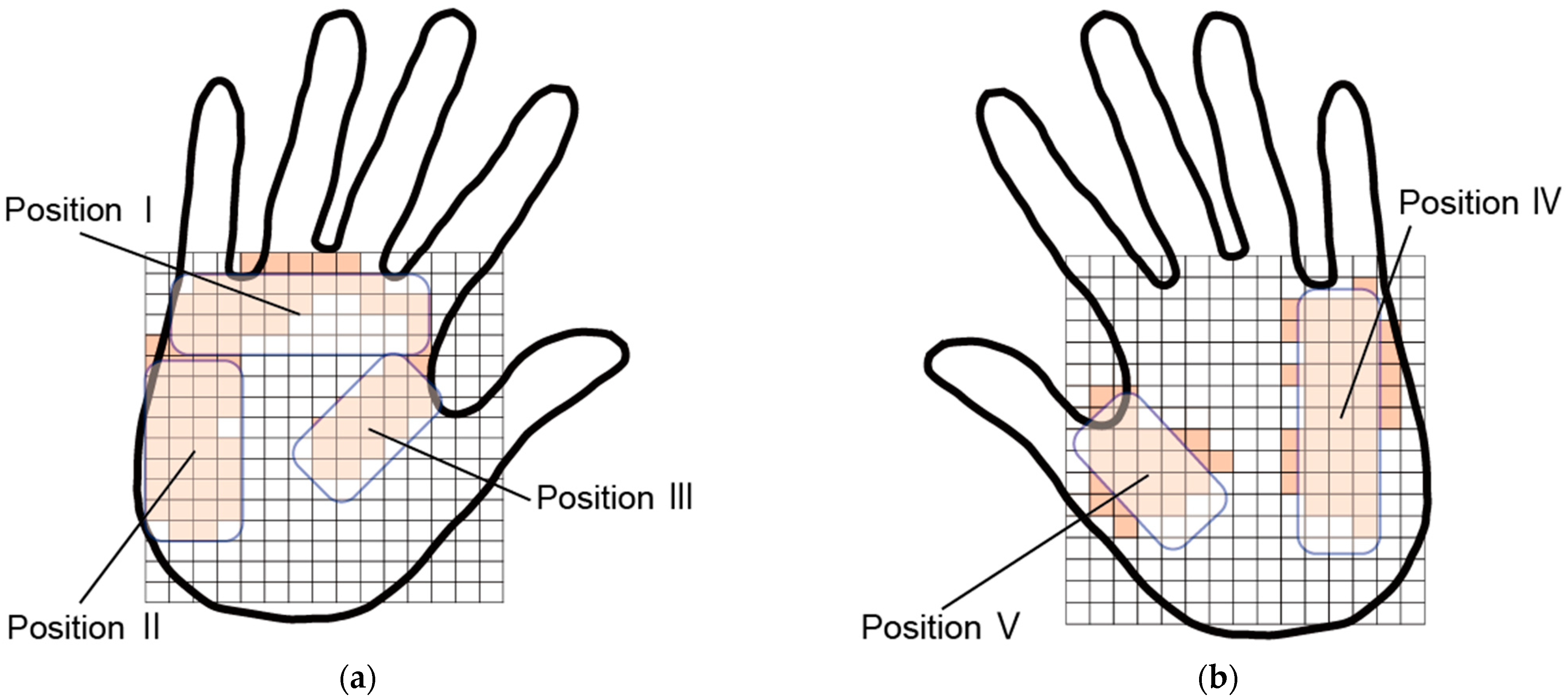
2.3. Detailed Design of Haptic Glove: Areas That Apply Pressure
2.4. Detailed Design of Haptic Glove: Distribution of Contact Strength
2.5. Detailed Design of the Haptic Glove: Number of Pouch Actuators
3. Experiments with Proposed Haptic Glove
3.1. Experimental Protocol
- (1)
- The gloves were heated with a hair dryer (1200 W, Panasonic, Osaka, Japan) for 30 s to ensure that the bag actuators would properly inflate. The temperature of the pouch at that time was appropriate at a translation of 33 °C.
- (2)
- The participant sat on a chair and wore the haptic glove on their right hand.
- (3)
- The participant placed their hand with the device at a predetermined position. A fence prevented participants from seeing their hand.
- (4)
- The gloved hand was heated with a hair dryer from a position about 20 cm away. The actuators were heated over the haptic glove; each actuator was heated for 3 s, and they were actuated sequentially in a clockwise direction for a total of 30 s. Under this condition, none of the 10 participants perceived excessive heat from the dryer. The participants were asked to keep their eyes closed.
- (5)
- The participants were asked to move their hands for 5 s to simulate a handshake. Subsequently, the participants answered survey questions for 30 s. The questions are summarized in Table 3. In addition to the question concerning whether they felt the sensation of a handshake, three additional questions were prepared in this study. The first was whether they felt the force from the actuator. The second was whether they felt warmth from the heated actuator. The third was whether they felt the sensation of being grasped. The participants were asked to respond using a 7-point scale (from 1: Could not feel at all to 7: Feeling was strong). Because the surface temperature of the palm of the hand was about 33 °C, the pouch actuator did not shrink for about 30 s after the heating stopped.
- (6)
- Steps (1)–(5) were repeated for all glove patterns. Before the next pattern, the tactile glove was removed from the hand and the actuator was allowed to cool down for 1 min. The pouch actuators returned to their original state before the next experiment.
3.2. Experimental Results
3.3. Discussion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Graham, W.; Thomas, C.; Sriram, S.; Stephen, A.B. Perception of ultrasonic haptic feedback on the hand: Localisation and apparent motion. In CHI ‘14: Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Toronto, ON, Canada, 26 April–1 May 2014; Association for Computing Machinery: New York, NY, USA, 2014; pp. 1133–1142. [Google Scholar]
- Wilder, P.; Edwin, B. Somatic motor and sensory representation in the cerebral cortex of man as studied by electrical stimulation. Brain 1937, 60, 389–443. [Google Scholar]
- Greg, L.S.; Susan, L.D.; Murray, R.B.; Todd, C.D. Exploring the handshake in employment interviews. J. Appl. Psychol. 2008, 93, 1139–1146. [Google Scholar]
- Chaplin, W.F.; Phillips, J.B.; Brown, J.D.; Clanton, N.R.; Stein, J.L. Handshaking, gender, personality, and first impressions. J. Pers. Soc. Psychol. 2000, 79, 110–117. [Google Scholar] [PubMed]
- Nunez, C.M.; Huerta, B.N.; Okamura, A.M.; Culbertson, H. Investigating Social Haptic Illusions for Tactile Stroking (SHIFTS). In Proceedings of the 2020 IEEE Haptics Symposium (HAPTICS), Crystal City, VA, USA, 28–31 March 2020; Volume 1, pp. 629–636. [Google Scholar]
- Takahashi, N.; Okazaki, R.; Okabe, H.; Yoshikawa, H.; Aou, K.; Yamakawa, S.; Yokoyama, M.; Kajimoto, H. Sense-roid: Emotional haptic communication with yourself. In Proceedings of the Virtual Reality International Conference (VRIC 2011), Laval, France, 6–8 April 2011; Volume 1, pp. 6–8. [Google Scholar]
- Mourad, B.; Grigore, B.; Grigore, P.; Rares, B. The Rutgers Master II—New Design ForceFeedback Glove. IEEE/ASME Trans. Mechatron. 2002, 7, 256–263. [Google Scholar]
- Kitazaki, M.; Hamada, T.; Yoshiho, K.; Kondo, R.; Amemiya, T.; Hirota, K.; Ikei, Y. Virtual walking sensation by prerecorded oscillating optic flow and synchronous foot vibration. IEEE Comput. Graph. Appl. 2018, 38, 44–56. [Google Scholar] [CrossRef]
- Hirose, M.; Hirota, K.; Ogi, T.; Yano, H.; Kakehi, N.; Saito, M.; Nakashige, M. HapticGEAR: The development of a wearable force display system for immersive projection displays. In Proceedings of the IEEE Virtual Reality 2001, Yokohama, Japan, 13–17 March 2001; pp. 123–129. [Google Scholar]
- Talhan, A.; Kim, H.; Jeon, S. Tactile Ring: Multi-Mode Finger-Worn Soft Actuator for Rich Haptic Feedback. IEEE Access 2020, 8, 957–966. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, D.; Zhang, Y.; Liu, J.; Wen, L.; Xu, W.; Zhang, Y. A three-fingered force feedback glove using fiber-reinforced soft bending actuators. IEEE Trans. Ind. Electron. 2020, 67, 7681–7690. [Google Scholar]
- Uddin, M.W.; Zhang, X.; Wang, D. A pneumatic-driven haptic glove with force and tactile feedback. Front. Bioeng. Biotechnol. 2017, 304–311. [Google Scholar] [CrossRef]
- Premarathna, C.P.; Chathuranga, D.S.; Lalitharatne, T.D. Fabrication of a soft tactile display based on pneumatic balloon actuators and voice coils: Evaluation of force and vibration sensations. In Proceedings of the SII 2017—2017 IEEE/SICE International Symposium on System Integration, Taipei, Taiwan, 11–14 December 2017; pp. 763–768. [Google Scholar]
- Rognon, C.; Koehler, M.; Duriez, C.; Floreano, D.; Okamura, A.M. Soft Haptic Device to Render the Sensation of Flying Like a Drone. IEEE Robot. Autom. Lett. 2019, 4, 2524–2531. [Google Scholar] [CrossRef]
- Delazio, A.; Nakagaki, K.; Lehman, J.F.; Klatzky, R.L.; Sample, A.P.; Hudson, S.E. Force jacket: Pneumatically-actuated jacket for embodied haptic experiences. In Proceedings of the Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018. [Google Scholar]
- Bardaweel, H.K.; Anderson, M.J.; Weiss, L.W.; Richards, R.F.; Richards, C.D. Characterization and modeling of the dynamic behavior of a liquid-vapor phase change actuator. Sens. Actuators A Phys. 2009, 149, 284–291. [Google Scholar] [CrossRef]
- Henning, A.K. Liquid and gas-liquid phase behavior in thermopneumatically actuated microvalves. Microfluid. Devices Syst. 1998, 3515, 53. [Google Scholar]
- Akagi, T.; Dohta, S.; Fujimoto, S.; Tsuji, Y.; Fujiwara, Y. Development of flexible thin actuator driven by low boiling point liquid. Dep. Intell. Mech. Eng. 2015, 3, 55–59. [Google Scholar] [CrossRef]
- Tsuji, Y.; Dohta, S.; Akagi, T.; Fujiwara, Y. Analysis of flexible thin actuator using gas-liquid phase-change of low boiling point liquid. In Proceedings of the 3rd International Conference on Intelligent Technologies and Engineering Systems (ICITES2014), Kaohsiung, Taiwan, 19–21 December 2014; 2016; Volume 345, pp. 67–73. [Google Scholar]
- Nakahara, K.; Narumi, K.; Niiyama, R.; Kawahara, Y. Electric phasechange actuator with inkjet printed flexible circuit for printable and integrated robot prototyping. In Proceedings of the IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 1856–1863. [Google Scholar]
- Narumi, K.; Sato, H.; Nakahara, K.; Seong, A.Y.; Morinaga, K.; Kakehi, Y.; Niiyama, R.; Kawahara, Y. Liquid pouch motors: Printable planar actuators driven by liquid-to-gas phase change for shape-changing interfaces. IEEE Robot. Autom. Lett. 2020, 5, 3915–3922. [Google Scholar]
- Sanchez, V.; Payne, J.C.; Preston, J.D.; Alvarez, T.J.; Weaver, C.J.; Atalay, T.A.; Boyvat, M.; Daniel, M.; Vogt, M.D.; Wood, J.R.; et al. Smart thermally actuating textiles. Adv. Mater. Technol. 2020, 5, 200038. [Google Scholar] [CrossRef]
- Hirai, S.; Nagatomo, T.; Hiraki, T.; Ishizuka, H.; Kawahara, Y.; Miki, N. Micro Elastic Pouch Motors: Elastically Deformable and Miniaturized Soft Actuators Using Liquid-to-Gas Phase Change. IEEE Robot. Autom. Lett. 2021, 6, 5373–5380. [Google Scholar] [CrossRef]
- Bell, L.E. Cooling, heating, generating power, and recovering waste heat with thermoelectric systems. Science 2008, 321, 1457–1461. [Google Scholar] [CrossRef]
- Altmüller, R.; Schwödiauer, R.; Kaltseis, R.; Bauer, S.; Graz, I.M. Large area expansion of a soft dielectric membrane triggered by a liquid gaseous phase change. Appl. Phys. A Mater. Sci. Process. 2011, 105, 1–3. [Google Scholar]
- Usui, T.; Ishizuka, H.; Hiraki, T.; Kawahara, Y.; Ikeda, S.; Oshiro, O. Miniaturized Liquid Pouch Motors Using Flexible Liquid Metal Heater. In Proceedings of the 33rd International Microprocesses and Nanotechnology Conference (MNC 2020), Online, 9–12 November 2020; Volume 3922, pp. 1–2. [Google Scholar]
- Meder, F.; Naselli, G.A.; Sadeghi, A.; Mazzolai, B. Remotely Light-Powered Soft Fluidic Actuators Based on Plasmonic-Driven Phase Transitions in Elastic Constraint. Adv. Mater. 2019, 31, 1905671. [Google Scholar]
- Kobayashi, K.; Maeno, T. Relationship between the Structure of Finger Tissue and the Location of Tactile Receptors. JSME Int. J. Ser. C Mech. Syst. Mach. Elem. Manuf. 1998, 41, 94–100. [Google Scholar]
- Kameyama, S.; Ishibashi, Y. Perception of synchronization errors in haptic and visual communications. In Proceedings of the Multimedia Systems and Applications IX, Boston, MA, USA, 2–3 October 2006; pp. 67–74. [Google Scholar]
- Silva, M.J.; Orozco, M.; Cha, J.; Saddik, E.A.; Petriu, M.E. Human perception of haptic-to-video and haptic-to-audio skew in multimedia applications. ACM Trans. Multimed. Comput. Commun. Appl. 2013, 9, 1–16. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position | Novec ™ 7000 [mL] | Width [cm] |
|---|---|---|
| I | 0.10 | 5.0 |
| II | 0.15 | 4.0 |
| III | 0.10 | 2.0 |
| Pattern | Actuators | Number of Actuators |
|---|---|---|
| A | Position I | 1 |
| B | Position II | 1 |
| C | Position III | 1 |
| D | Positions I and II | 2 |
| E | Positions I and III | 2 |
| F | Positions II and III | 2 |
| G | All positions | 3 |
| No. | Question |
|---|---|
| 1 | Did you feel the force? |
| 2 | Did you feel warmth like a human body? |
| 3 | Did you feel as if you were being grasped? |
| 4 | Did you feel as if you were shaking hands? |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yamaguchi, S.; Hiraki, T.; Ishizuka, H.; Miki, N. Handshake Feedback in a Haptic Glove Using Pouch Actuators. Actuators 2023, 12, 51. https://doi.org/10.3390/act12020051
Yamaguchi S, Hiraki T, Ishizuka H, Miki N. Handshake Feedback in a Haptic Glove Using Pouch Actuators. Actuators. 2023; 12(2):51. https://doi.org/10.3390/act12020051
Chicago/Turabian StyleYamaguchi, Seiya, Takefumi Hiraki, Hiroki Ishizuka, and Norihisa Miki. 2023. "Handshake Feedback in a Haptic Glove Using Pouch Actuators" Actuators 12, no. 2: 51. https://doi.org/10.3390/act12020051
APA StyleYamaguchi, S., Hiraki, T., Ishizuka, H., & Miki, N. (2023). Handshake Feedback in a Haptic Glove Using Pouch Actuators. Actuators, 12(2), 51. https://doi.org/10.3390/act12020051