
Research on Climbing Robot for Transmission Tower Based on Foot-End Force Balancing Algorithm





Abstract
:1. Introduction
2. Problem Description and System Design
2.1. Problem Description
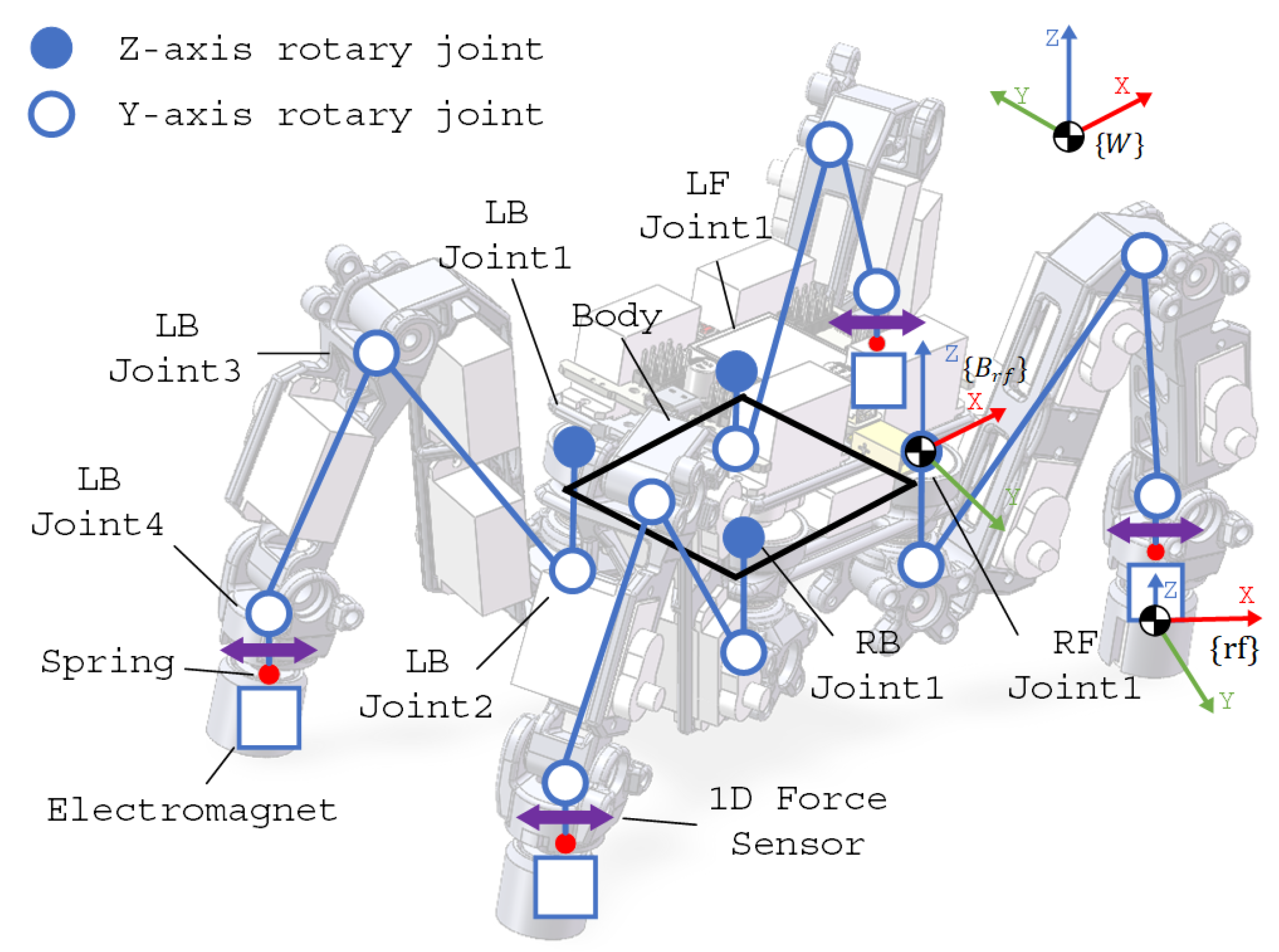
2.2. Mechanical Structure Design
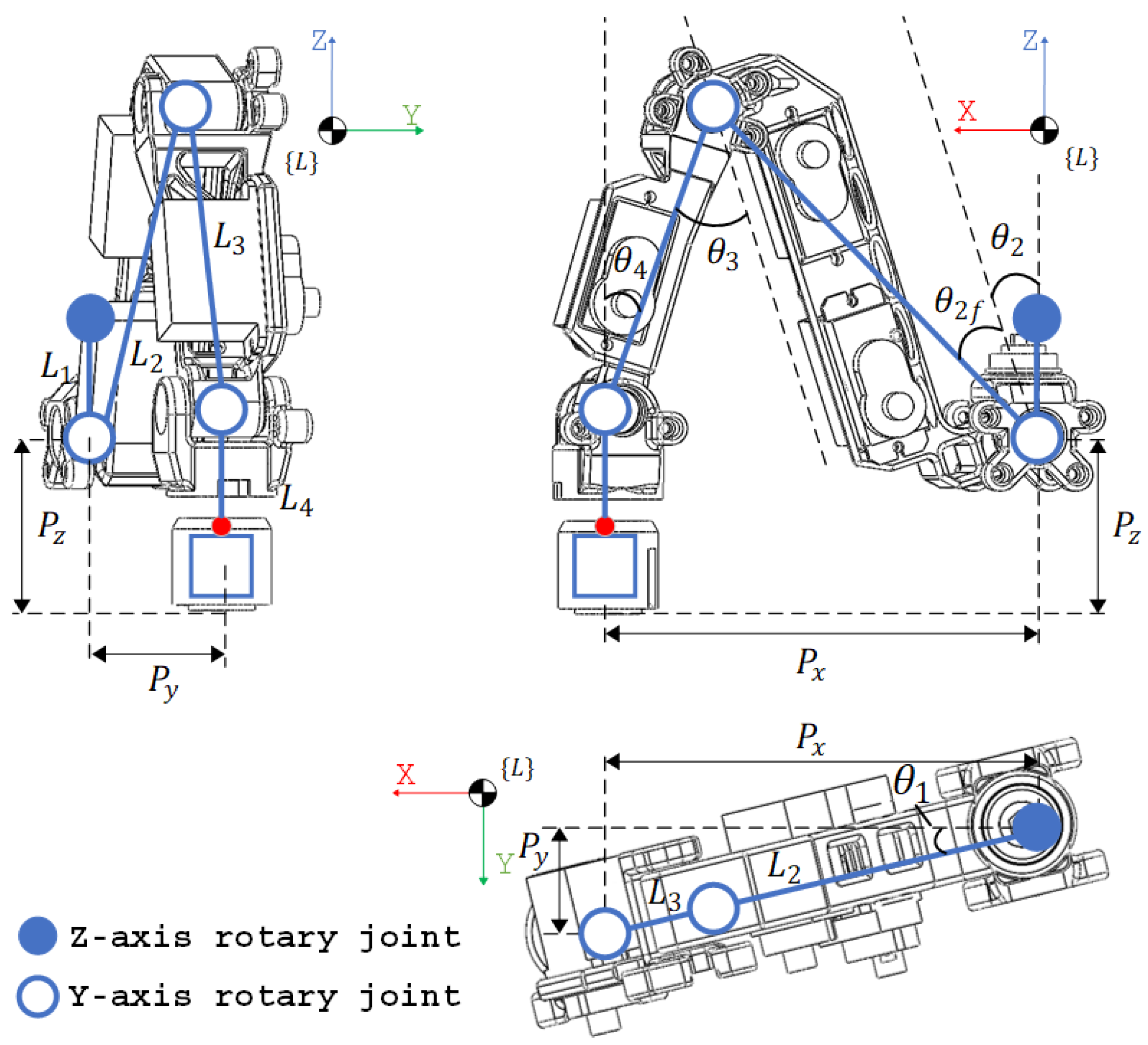
2.3. Kinematic Model
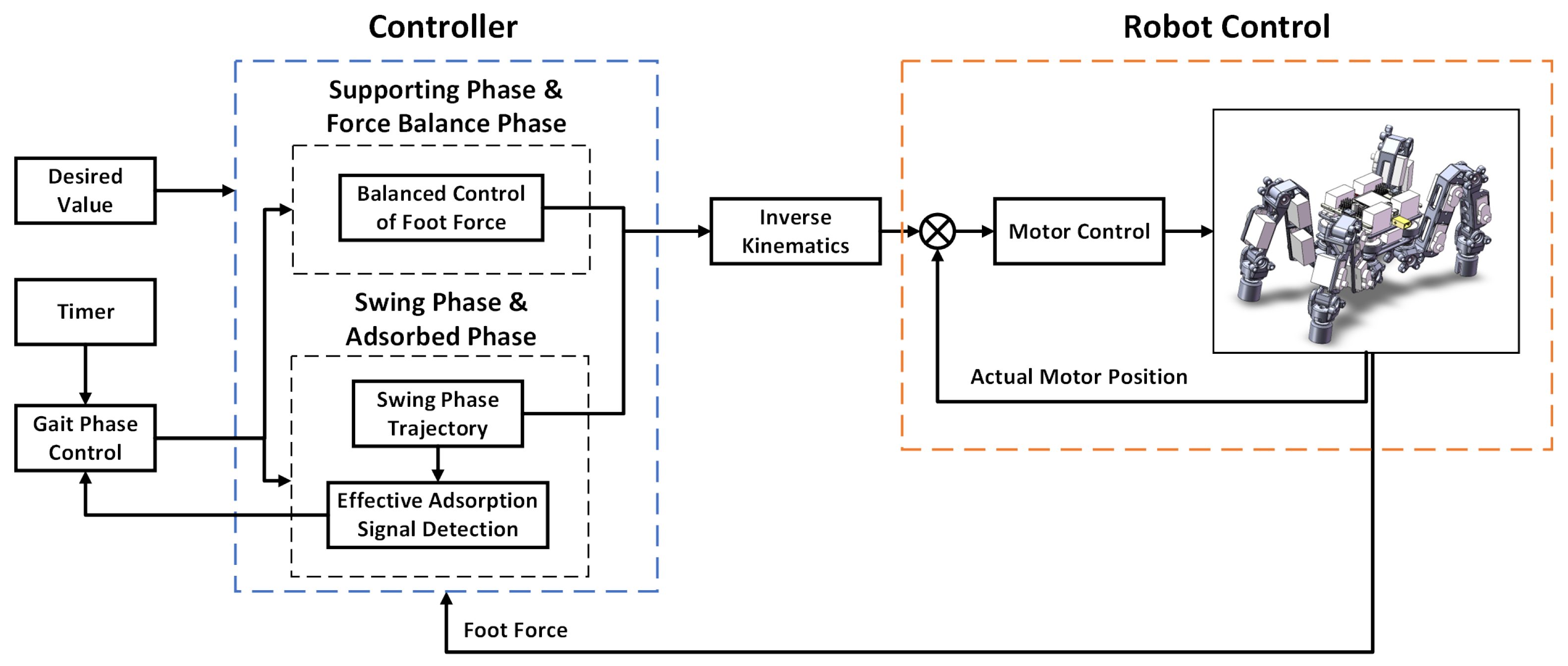
2.4. System Control Framework
3. Main Research Content
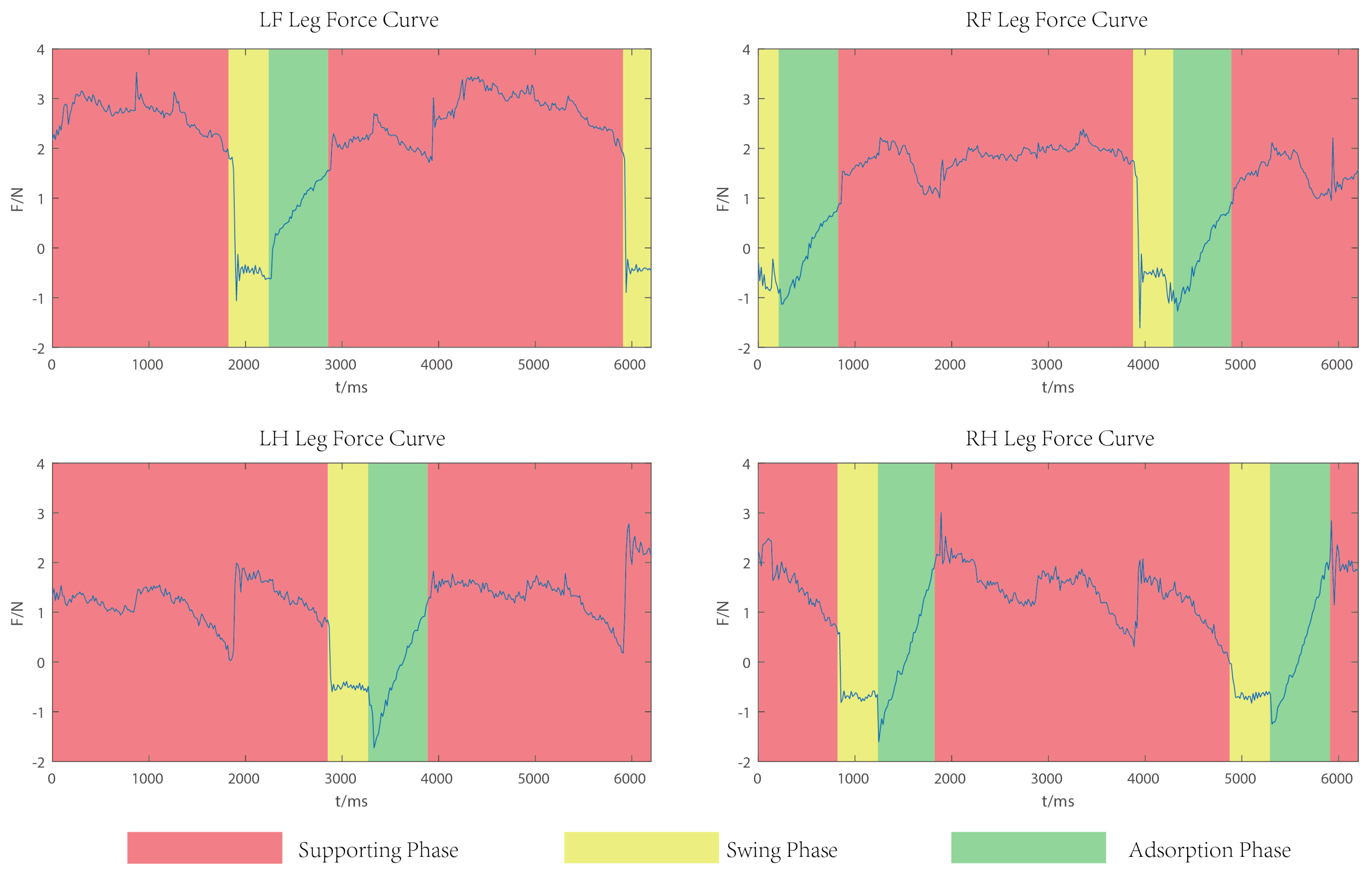
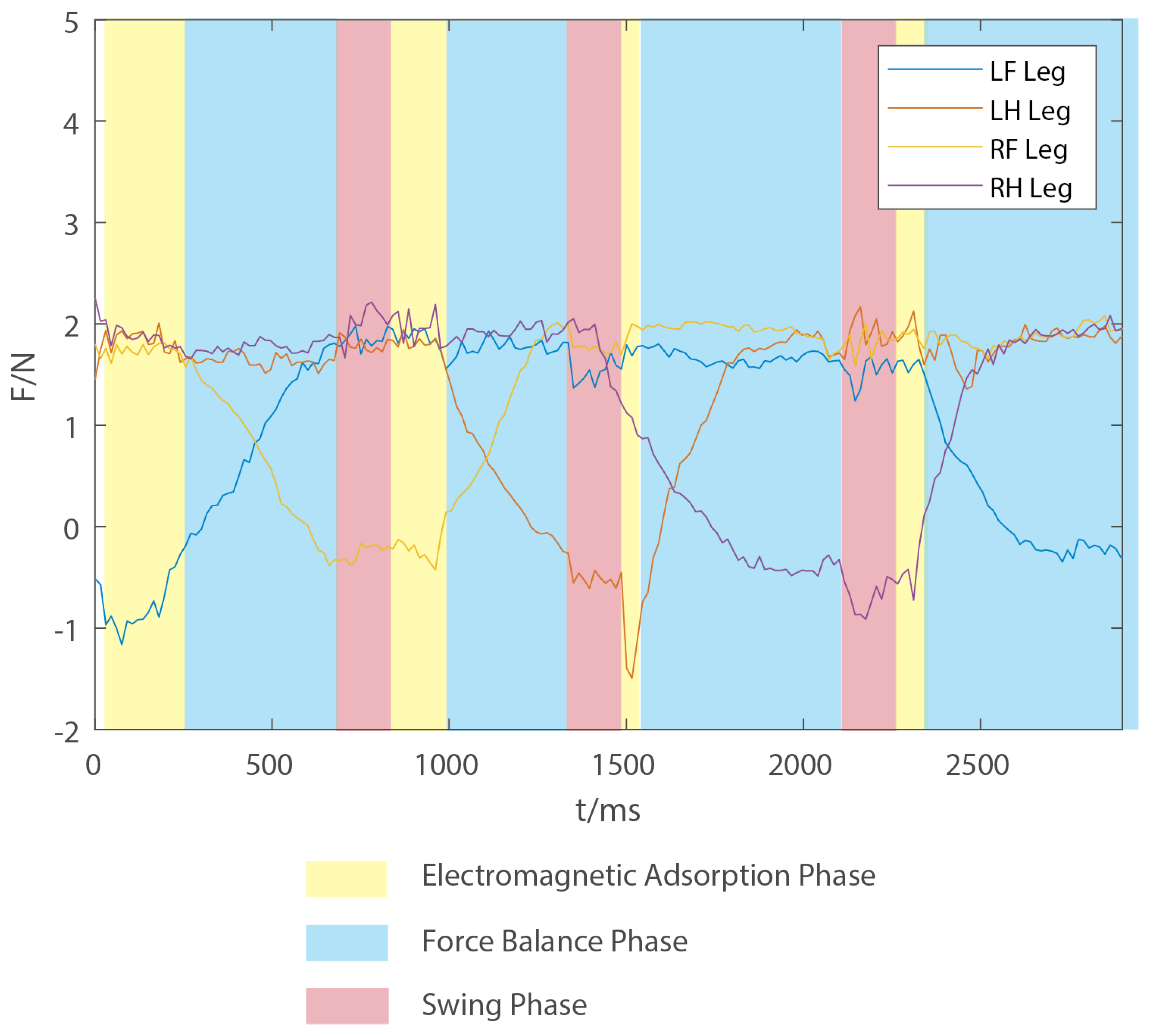
3.1. Detection of Effective Electromagnet Adhesion
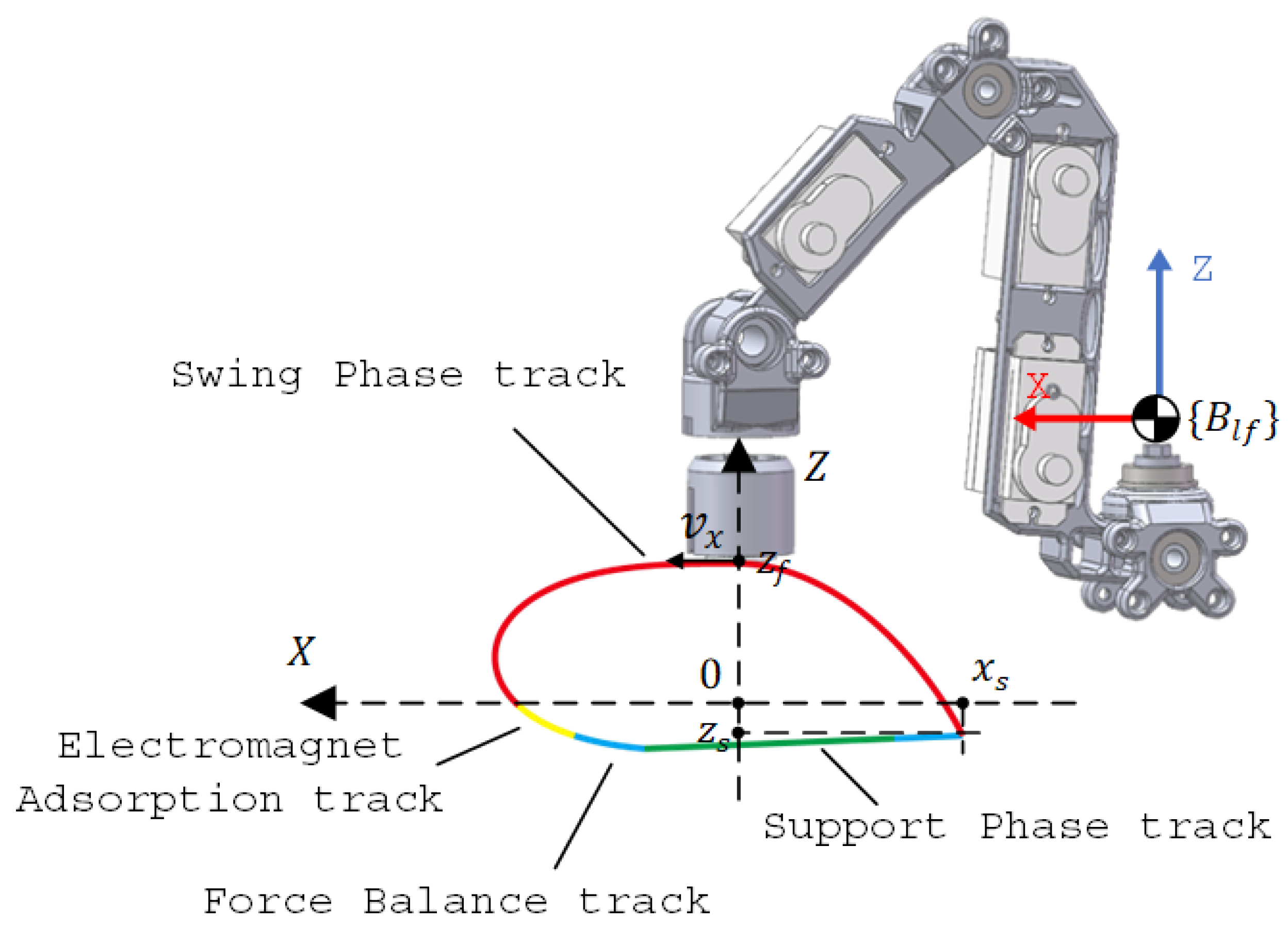
3.1.1. Swing Phase Motion Trajectory
3.1.2. Electromagnet Adhesion Signal Detection
3.2. Foot Force Equilibrium Control
4. Experiments
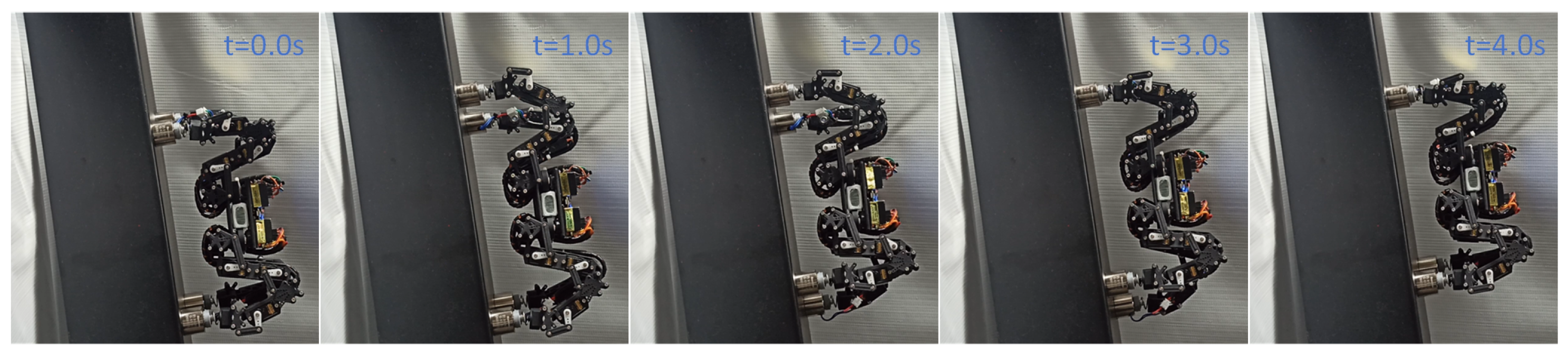
4.1. Climbing Experiment
4.2. Safe Load Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yao, Y.; Wang, W.; Qiao, Y.; He, Z.; Liu, F.; Li, X.; Liu, X.; Zou, D.; Zhang, T. A novel series-parallel hybrid robot for climbing transmission tower. Ind. Robot 2021, 48, 577–588. [Google Scholar] [CrossRef]
- Alhassan, A.; Zhang, X.; Shen, H.; Xu, H. Power transmission line inspection robots: A review, trends and challenges for future research. Int. J. Electr. Power Energy Syst. 2020, 118, 105862. [Google Scholar] [CrossRef]
- Fang, Y.; Wang, S.; Bi, Q.; Cui, D.; Yan, C. Design and technical development of wall-climbing robots: A review. J. Bionic Eng. 2022, 19, 877–901. [Google Scholar] [CrossRef]
- Liang, P.; Gao, X.; Zhang, Q.; Gao, R.; Li, M.; Xu, Y.; Zhu, W. Design and stability analysis of a wall-climbing robot using propulsive force of propeller. Symmetry 2020, 13, 37. [Google Scholar] [CrossRef]
- Lin, S.; Song, Y.; Wang, H.; Dai, J.; Lv, P.; Gao, W. Variable curvature adaptation and transformation flow of a passive-compliant magnetic wheeled wall-climbing robot. Mech. Mach. Theory 2023, 189, 105440. [Google Scholar] [CrossRef]
- Guan, Y.; Zhu, H.; Wu, W.; Zhou, X.; Jiang, L.; Cai, C.; Zhang, L.; Zhang, H. A Modular Biped Wall-Climbing Robot With High Mobility and Manipulating Function. IEEE-ASME Trans. Mechatron. 2013, 18, 1787–1798. [Google Scholar] [CrossRef]
- Gao, Y.; Wei, W.; Wang, X.; Li, Y.; Wang, D.; Yu, Q. Feasibility, planning and control of ground-wall transition for a suctorial hexapod robot. Appl. Intell. 2021, 51, 5506–5524. [Google Scholar] [CrossRef]
- Albee, K.; Espinoza, A.T.; Andreyeva, K.; Werner, N.; Chen, H.; Sarvary, T. Motion planning for climbing mobility with implementation on a wall-climbing robot. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–10. [Google Scholar]
- Gu, G.; Zou, J.; Zhao, R.; Zhao, X.; Zhu, X. Soft wall-climbing robots. Sci. Robot. 2018, 3, eaat2874. [Google Scholar] [CrossRef]
- Liu, Y.; Lim, B.; Lee, J.W.; Park, J.; Kim, T.; Seo, T. Steerable dry-adhesive linkage-type wall-climbing robot. Mech. Mach. Theory 2020, 153, 103987. [Google Scholar] [CrossRef]
- Lu, X.; Zhao, S.; Liu, X.; Wang, Y. Design and analysis of a climbing robot for pylon maintenance. Ind. Robot 2018, 45, 206–219. [Google Scholar] [CrossRef]
- Hong, S.; Um, Y.; Park, J.; Park, H.W. Agile and versatile climbing on ferromagnetic surfaces with a quadrupedal robot. Sci. Robot. 2022, 7, eadd1017. [Google Scholar] [CrossRef] [PubMed]
- de Rivaz, S.D.; Goldberg, B.; Doshi, N.; Jayaram, K.; Zhou, J.; Wood, R.J. Inverted and vertical climbing of a quadrupedal microrobot using electroadhesion. Sci. Robot. 2018, 3, eaau3038. [Google Scholar] [CrossRef] [PubMed]
- Ko, H.; Yi, H.; Jeong, H.E. Wall and ceiling climbing quadruped robot with superior water repellency manufactured using 3d printing (UNIclimb). Int. J. Precis. Eng. Anuf. Green Tech. 2017, 4, 273–280. [Google Scholar] [CrossRef]
- Zhang, G.; Rong, X.; Hui, C.; Li, Y.; Li, B. Torso motion control and toe trajectory generation of a trotting quadruped robot based on virtual model control. Adv. Robot. 2016, 30, 284–297. [Google Scholar] [CrossRef]
- Xie, Z.; Chen, J.Y.S.; Lim, G.W.; Bai, F. Data-Driven Robotic Tactile Grasping for Hyper-Personalization Line Pick-and-Place. Actuators 2023, 12, 192. [Google Scholar] [CrossRef]
- Zeng, X.; Zhang, S.; Zhang, H.; Li, X.; Zhou, H.; Fu, Y. Leg trajectory planning for quadruped robots with high-speed trot gait. Appl. Sci. 2019, 9, 1508. [Google Scholar] [CrossRef]
- Li, M.; Liu, Z.; Wang, M.; Pang, G.; Zhang, H. Design of a parallel quadruped robot based on a novel intelligent control system. Appl. Sci. 2022, 12, 4358. [Google Scholar] [CrossRef]
- Xiao, J.; Xiong, D.; Yu, Q.; Huang, K.; Lu, H.; Zeng, Z. A real-time sliding-window-based visual-inertial odometry for mavs. IEEE Trans. Ind. Inform. 2020, 16, 4049–4058. [Google Scholar] [CrossRef]
- Lee, J.H.; Park, J.H. Optimization of postural transition scheme for quadruped robots trotting on various surfaces. IEEE Access 2019, 7, 168126–168140. [Google Scholar] [CrossRef]
- Bloesch, M.; Hutter, M.; Hoepflinger, M.A.; Leutenegger, S.; Gehring, C. State estimation for legged robots-consistent fusion of leg kinematics and imu. In Proceedings of the 2012 Robotics: Science and Systems, Sydney, NSW, Australia, 9–13 July 2012; Volume 8, pp. 38–45. [Google Scholar]
- Xu, K.; Chen, H.; Mueller, A.; Ding, X. Kinematics of the center of mass for robotic mechanisms based on lie group theory. Mech. Mach. Theory 2022, 175, 104933. [Google Scholar] [CrossRef]
- Wang, L.; Meng, L.; Kang, R.; Liu, B.; Gu, S.; Zhang, Z.; Meng, F.; Ming, A. Design and dynamic locomotion control of quadruped robot with perception-less terrain adaptation. Cyborg Bionic Syst. 2022, 2022, 9816495. [Google Scholar] [CrossRef] [PubMed]
- Biswal, P.; Mohanty, P.K. Modeling and effective foot force distribution for the legs of a quadruped robot. Robotica 2021, 39, 1504–1517. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Degrees of Freedom for Each Leg | The Weight of the Robot | The Minimum Retracted Size | Climbing Step Distance | Crawling Speed | The Maximum Safe Load Capacity |
|---|---|---|---|---|---|
| 4 | 849 g | 56 × 138 × 105 mm | 80 mm | 1.2 m/min | 700 g |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Lu, J.; Du, H.; Liu, Y.; Zhu, W.; You, J. Research on Climbing Robot for Transmission Tower Based on Foot-End Force Balancing Algorithm. Actuators 2023, 12, 441. https://doi.org/10.3390/act12120441
Liu Z, Lu J, Du H, Liu Y, Zhu W, You J. Research on Climbing Robot for Transmission Tower Based on Foot-End Force Balancing Algorithm. Actuators. 2023; 12(12):441. https://doi.org/10.3390/act12120441
Chicago/Turabian StyleLiu, Zhuo, Jiawei Lu, Haibo Du, Yansheng Liu, Wenwu Zhu, and Junyi You. 2023. "Research on Climbing Robot for Transmission Tower Based on Foot-End Force Balancing Algorithm" Actuators 12, no. 12: 441. https://doi.org/10.3390/act12120441
APA StyleLiu, Z., Lu, J., Du, H., Liu, Y., Zhu, W., & You, J. (2023). Research on Climbing Robot for Transmission Tower Based on Foot-End Force Balancing Algorithm. Actuators, 12(12), 441. https://doi.org/10.3390/act12120441