
Electromechanical Actuator-Based Solution for a Scissor Lift





Abstract
:1. Introduction
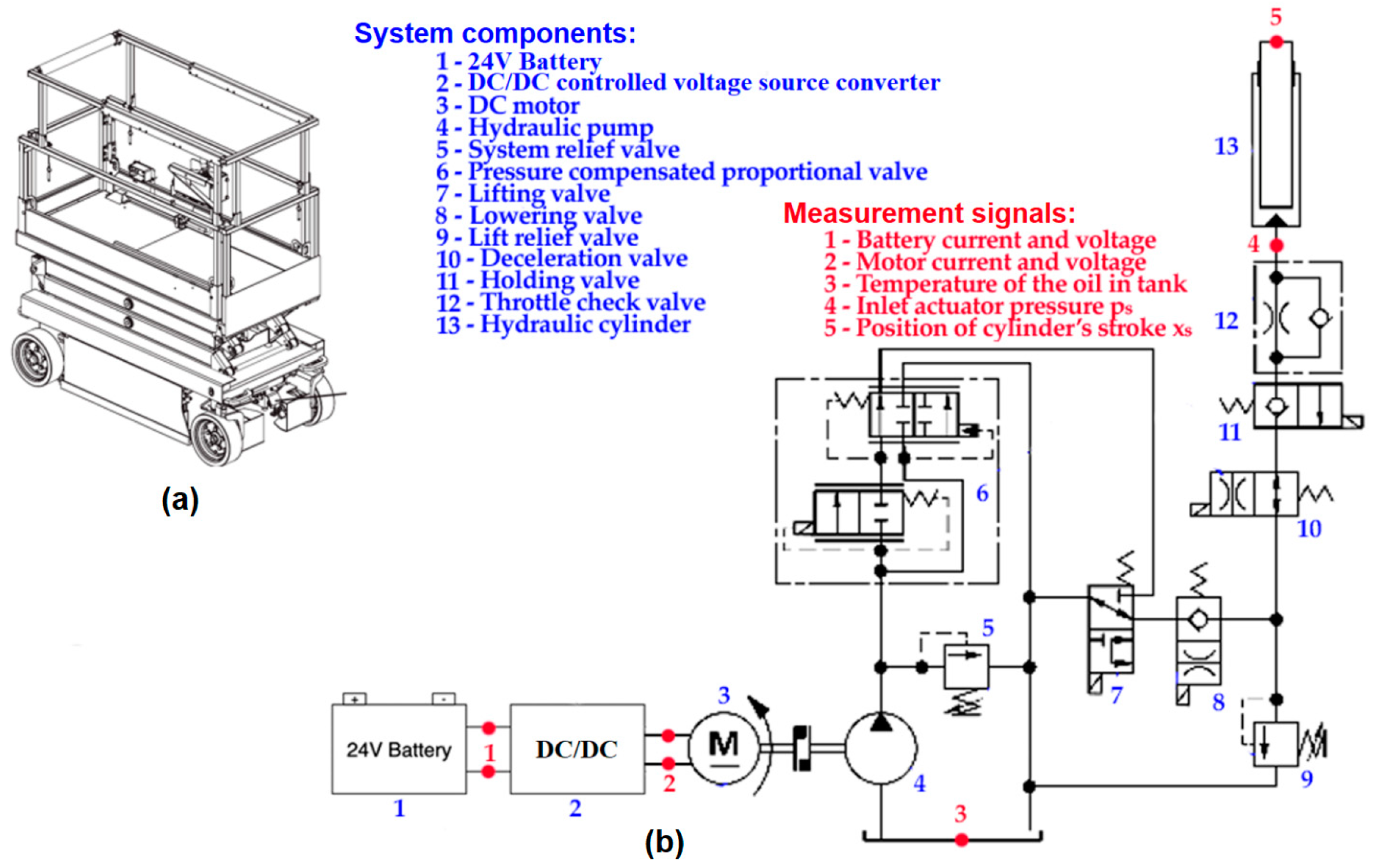
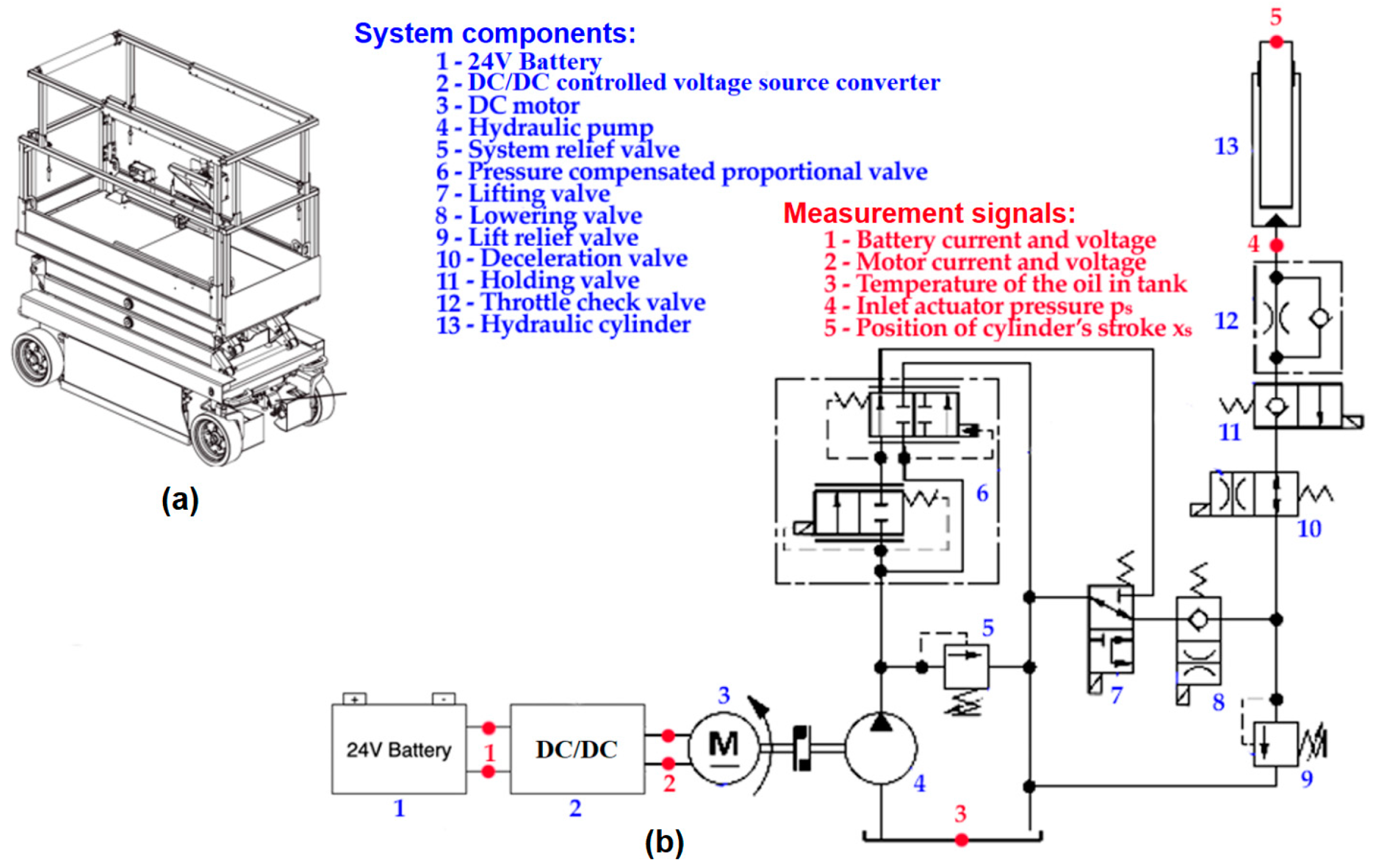
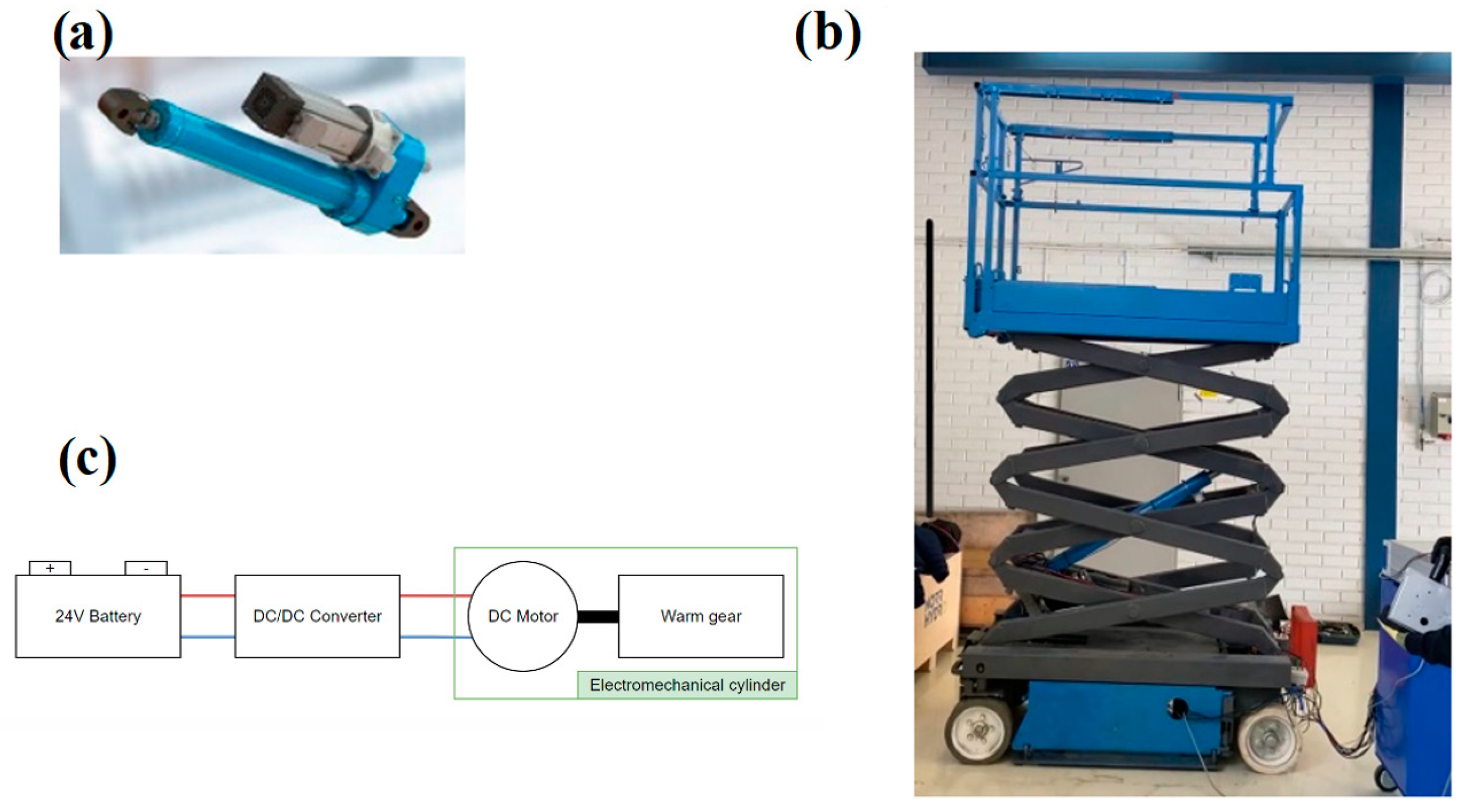
2. The Reference System—Scissor Lift
2.1. Overview of Test Arrangements
2.2. Utilized Duty Cycles
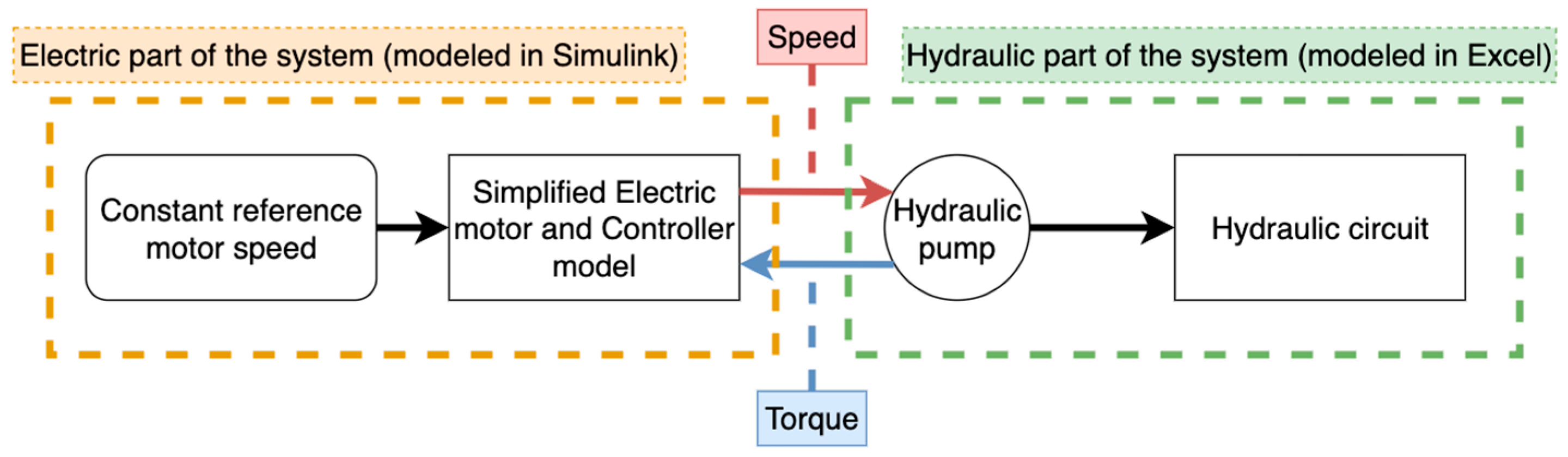
3. Model and Validation of the Reference System
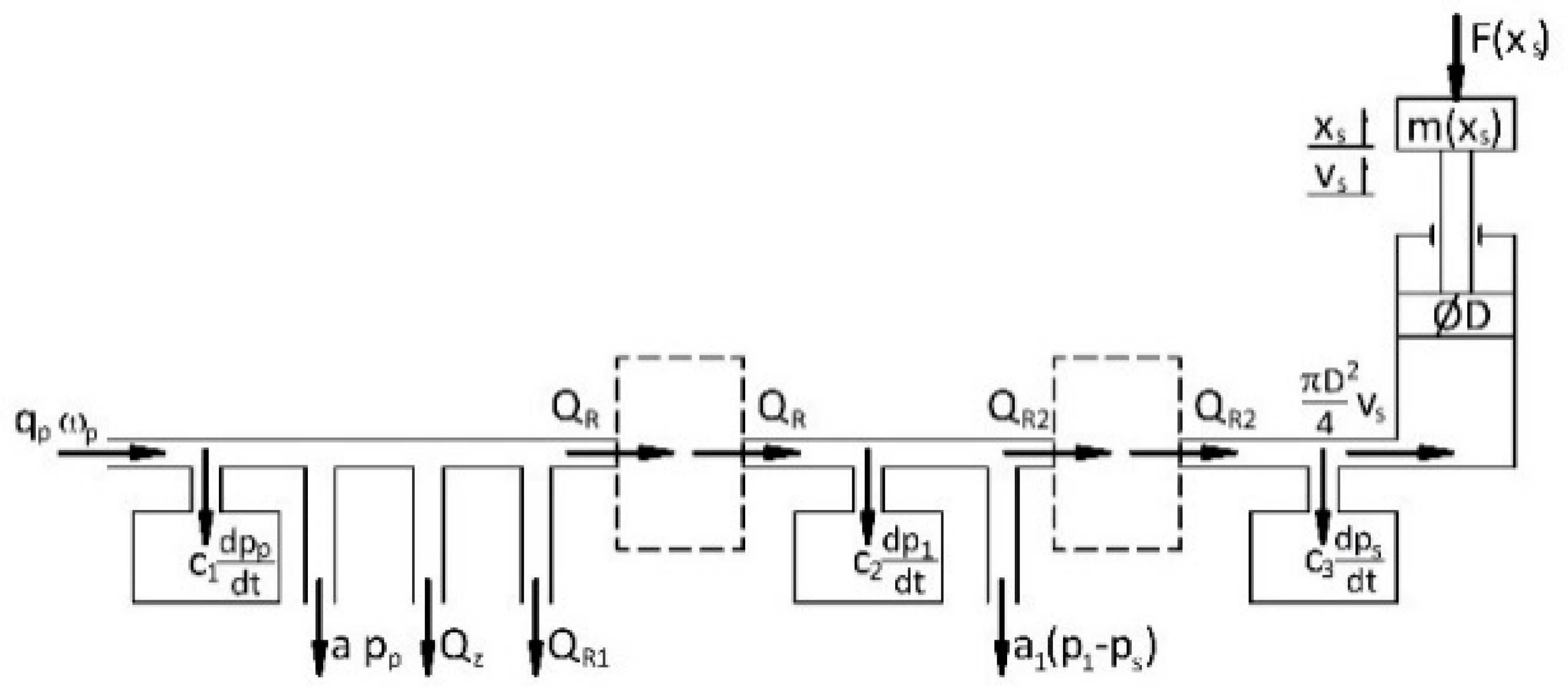
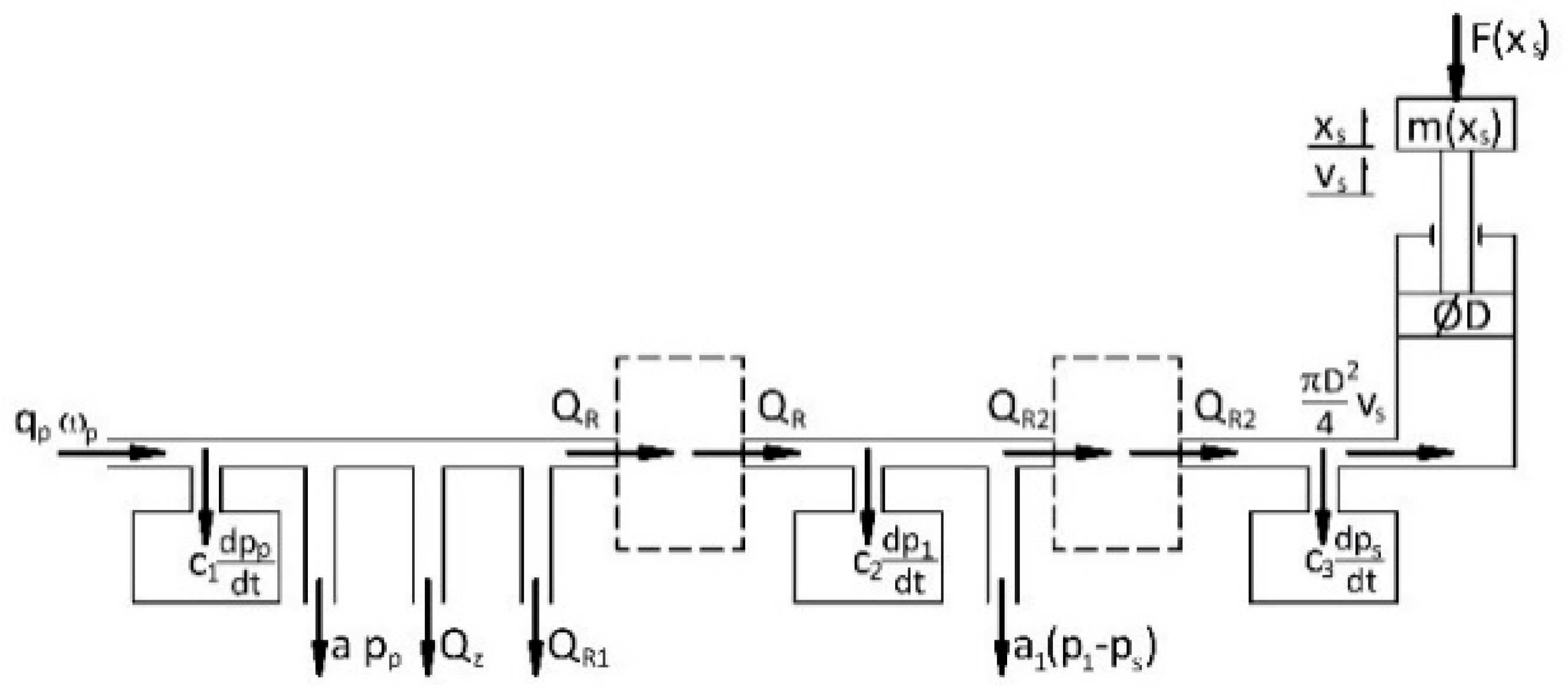
3.1. Hydraulic Components
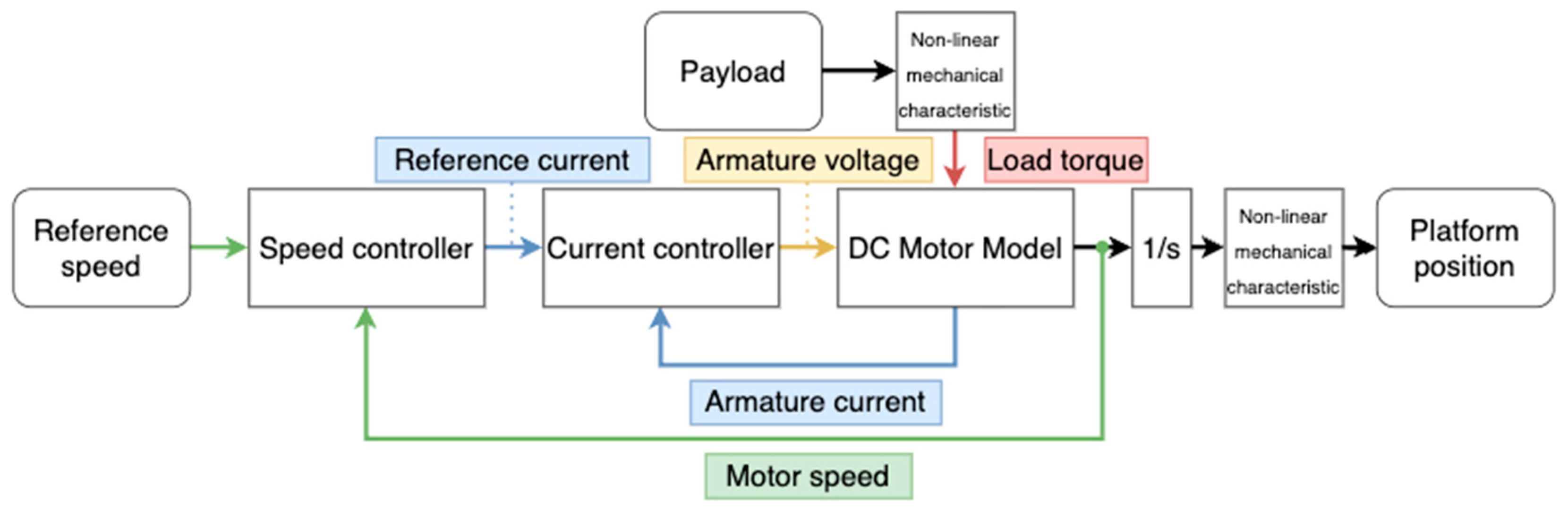
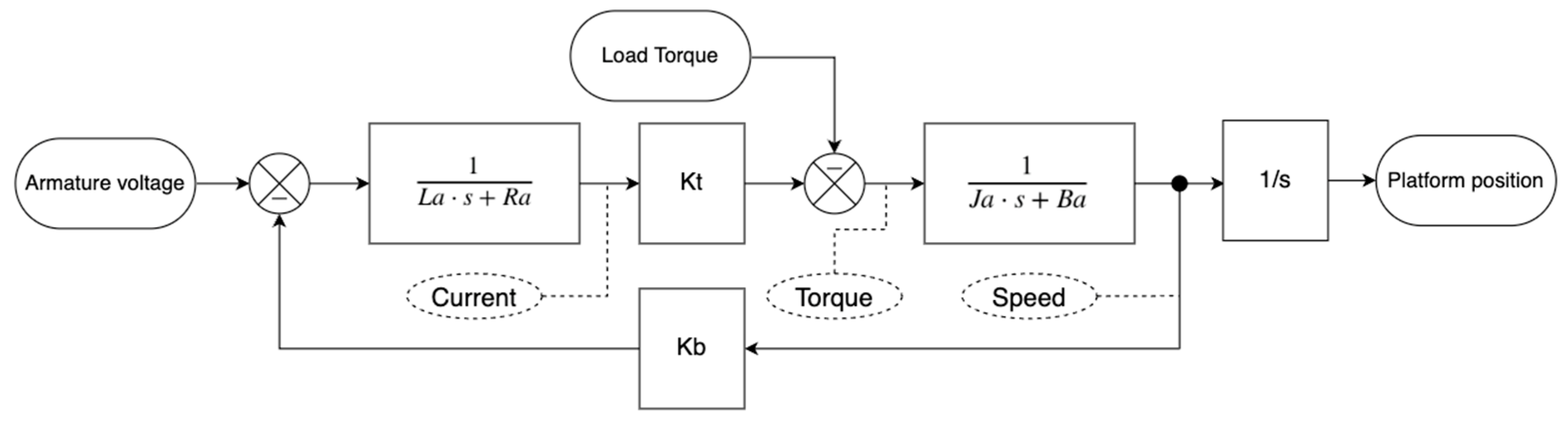
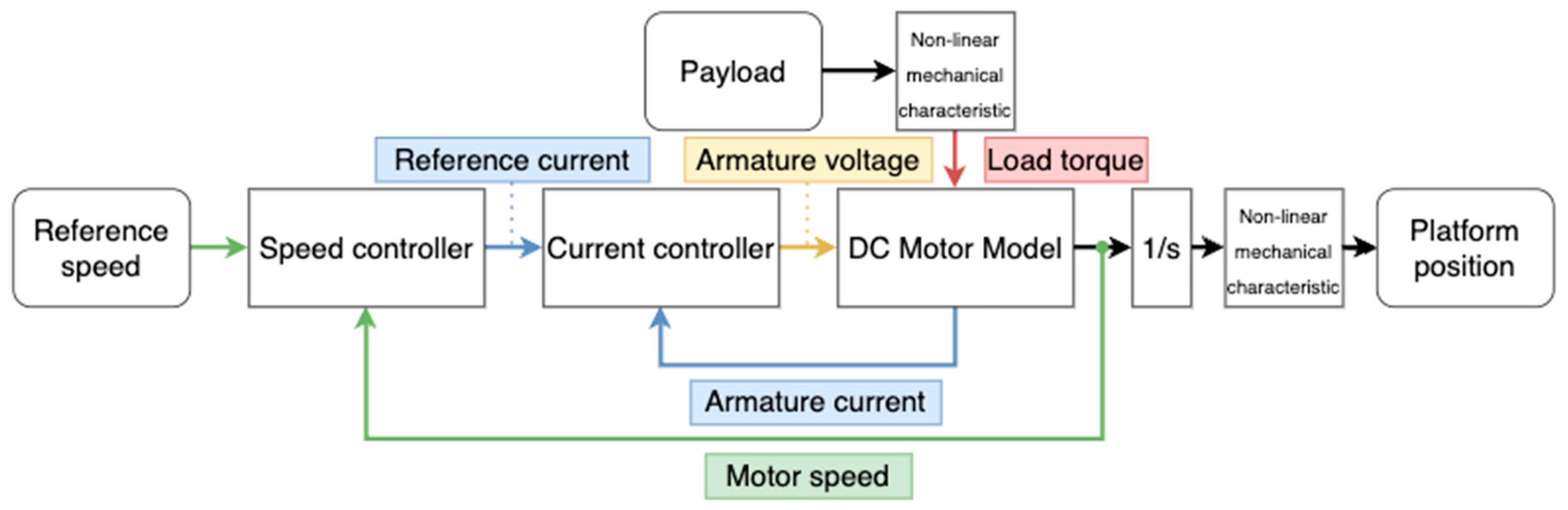
3.2. Electric Drive
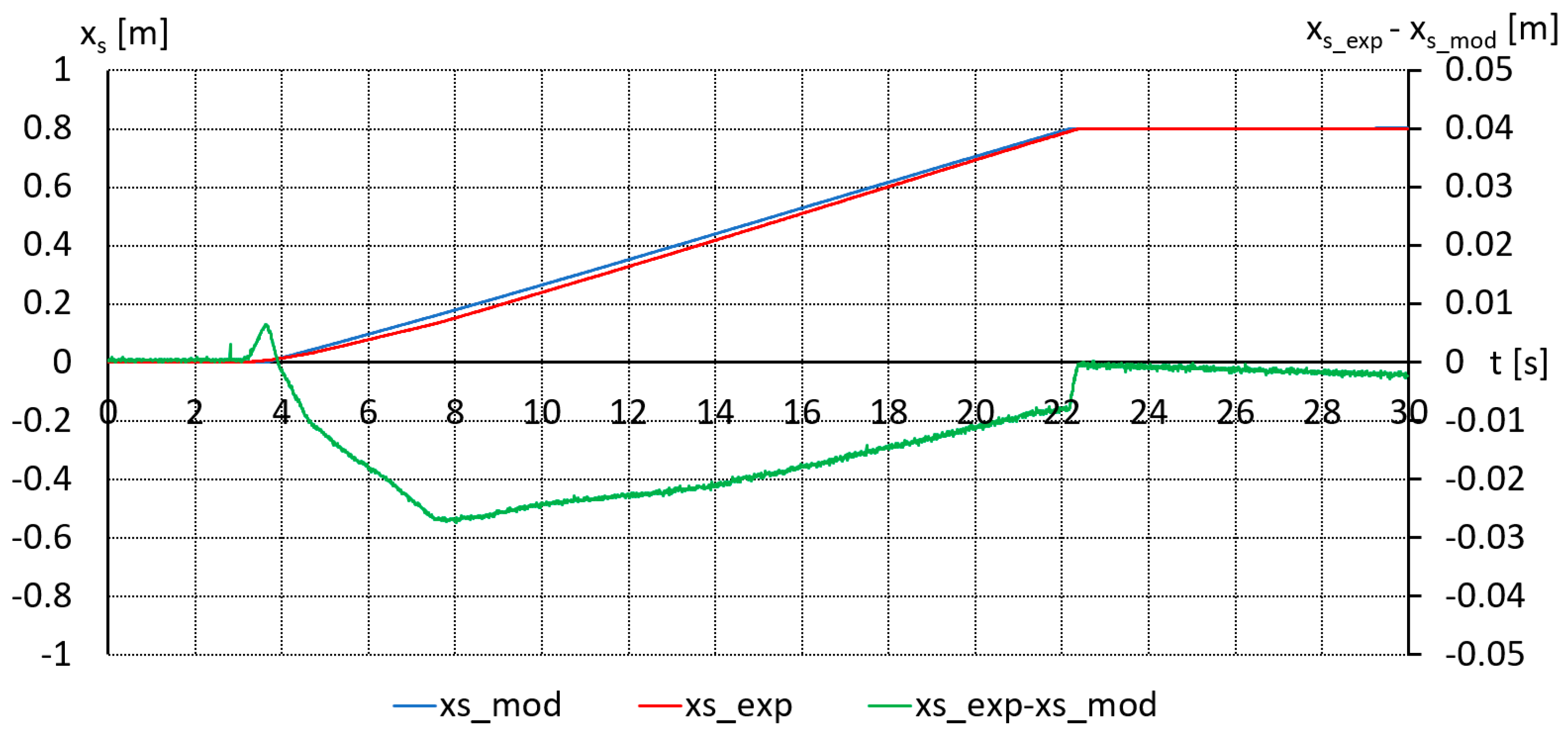
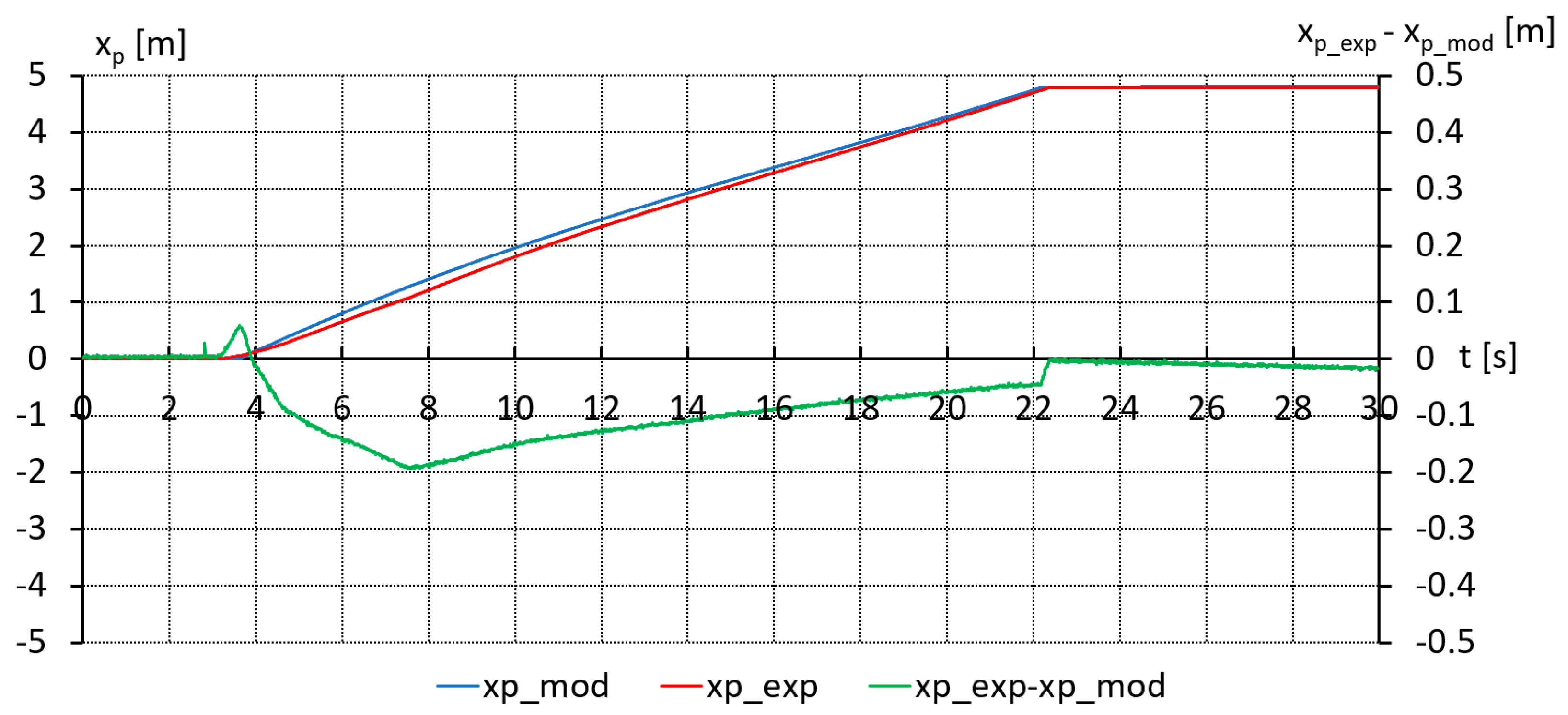
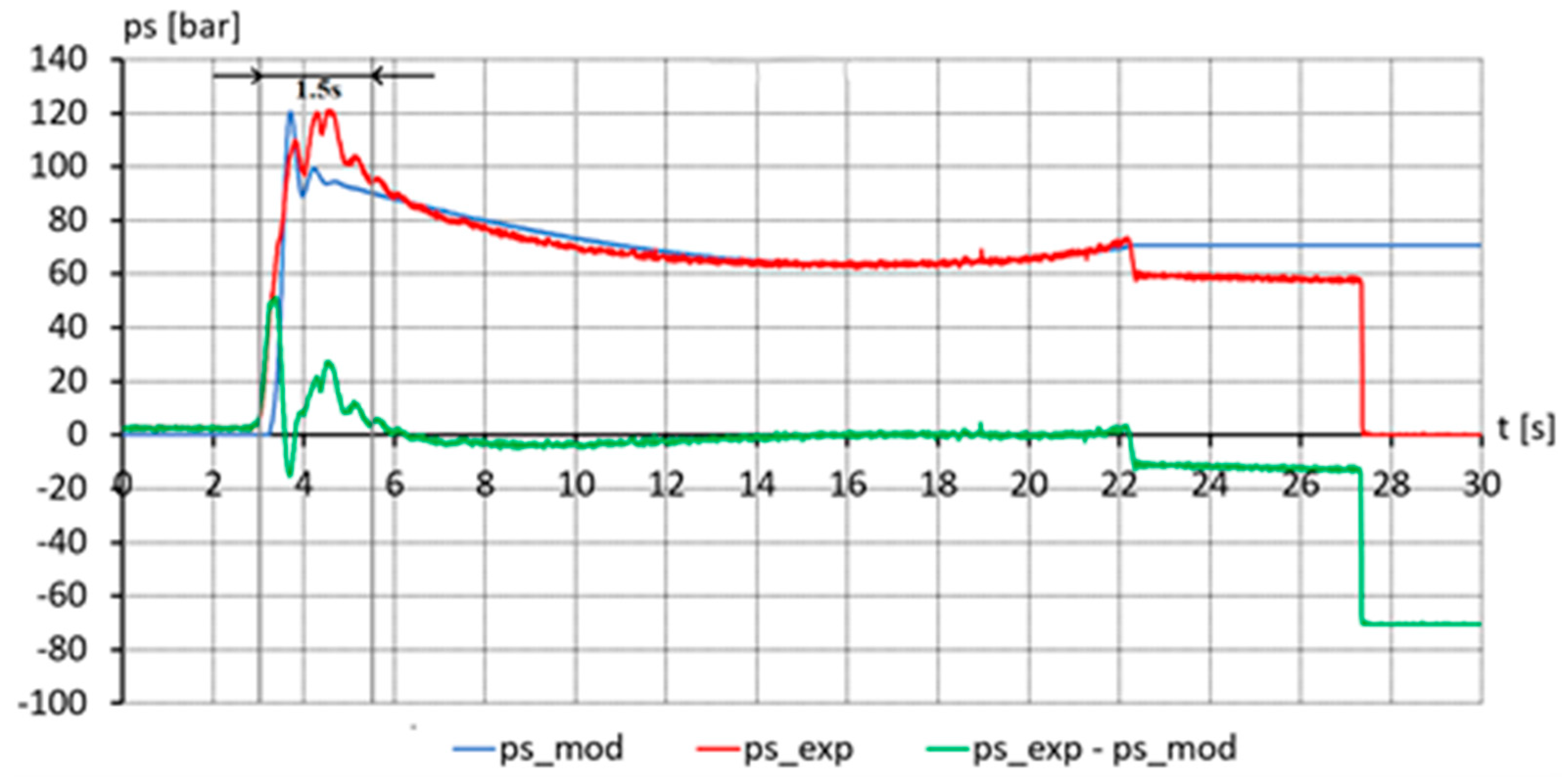
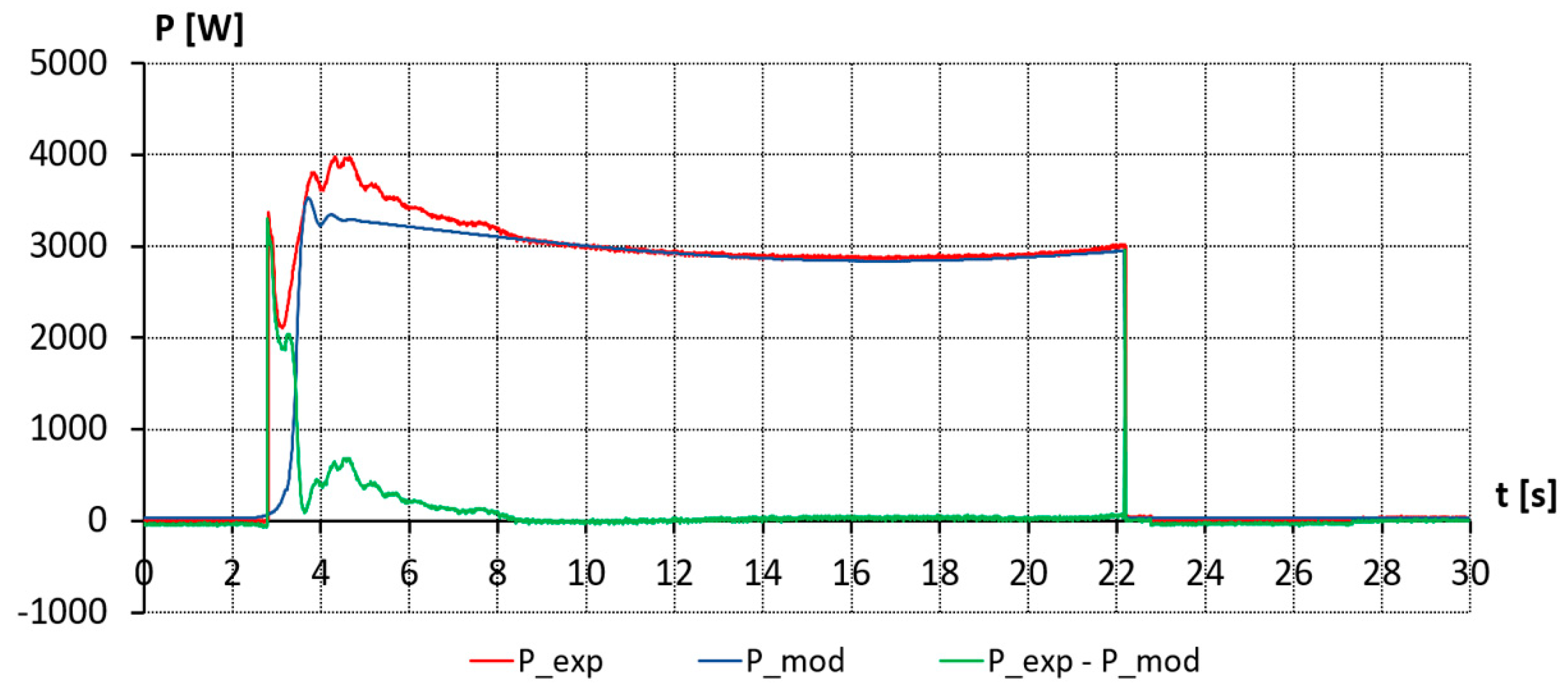
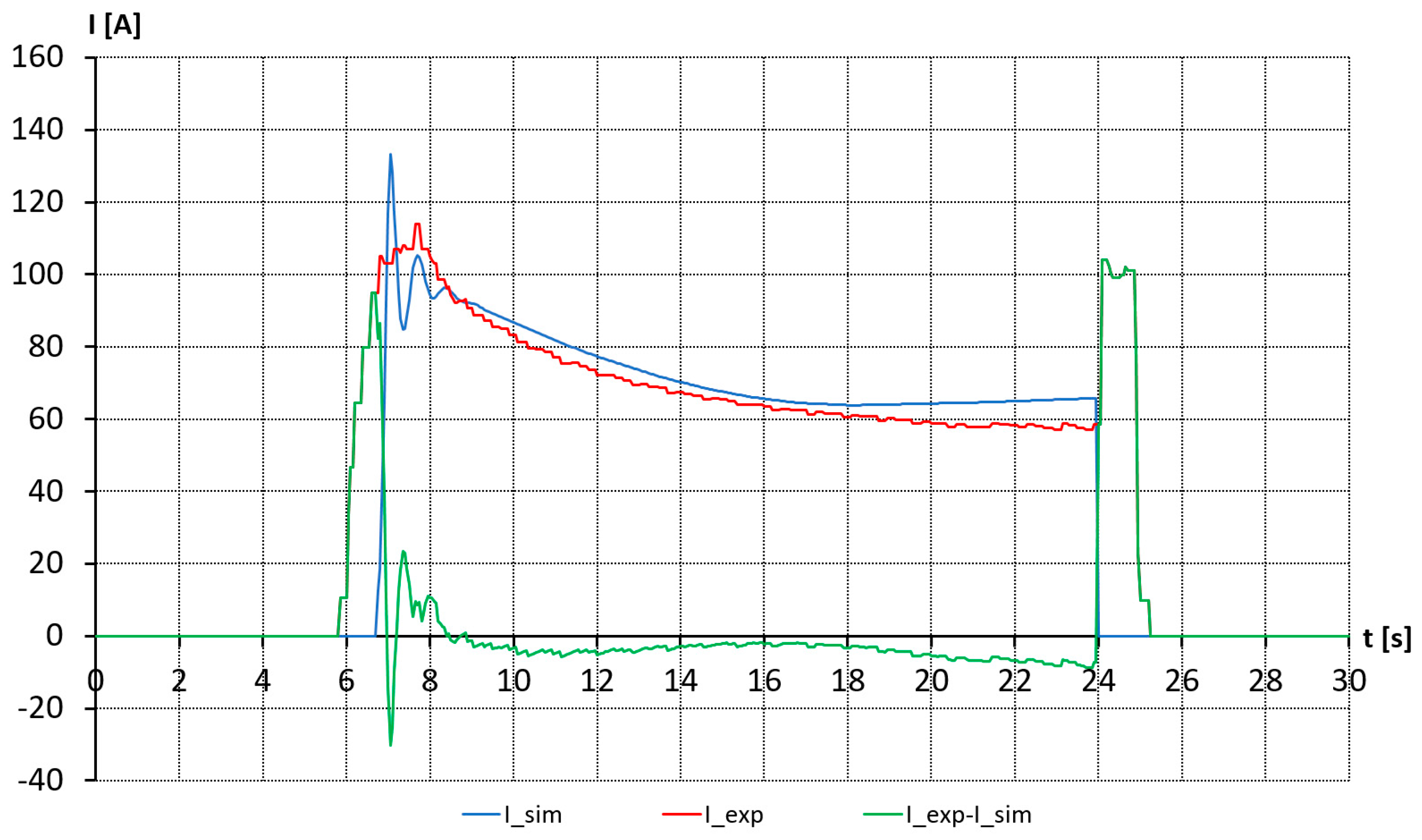
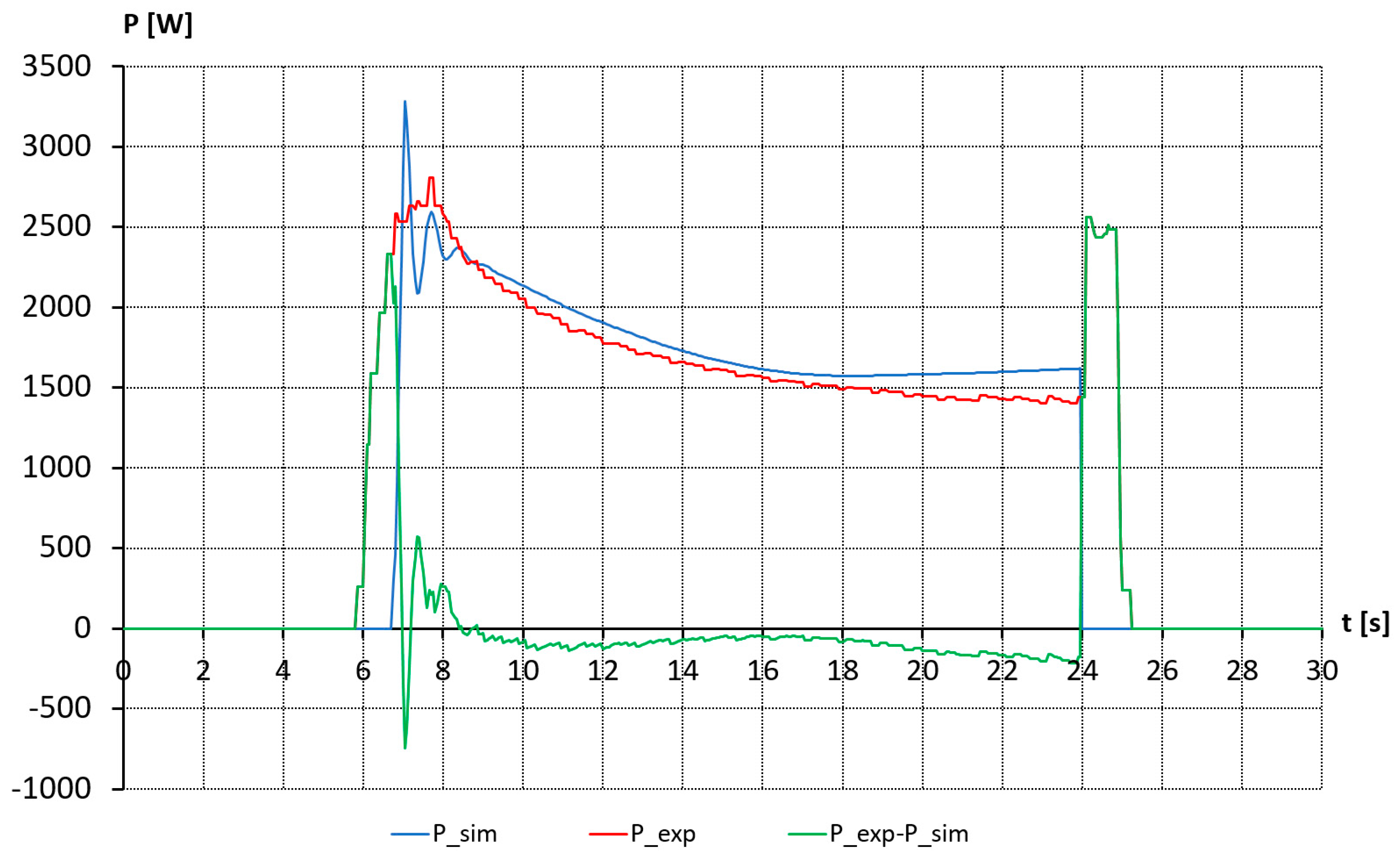
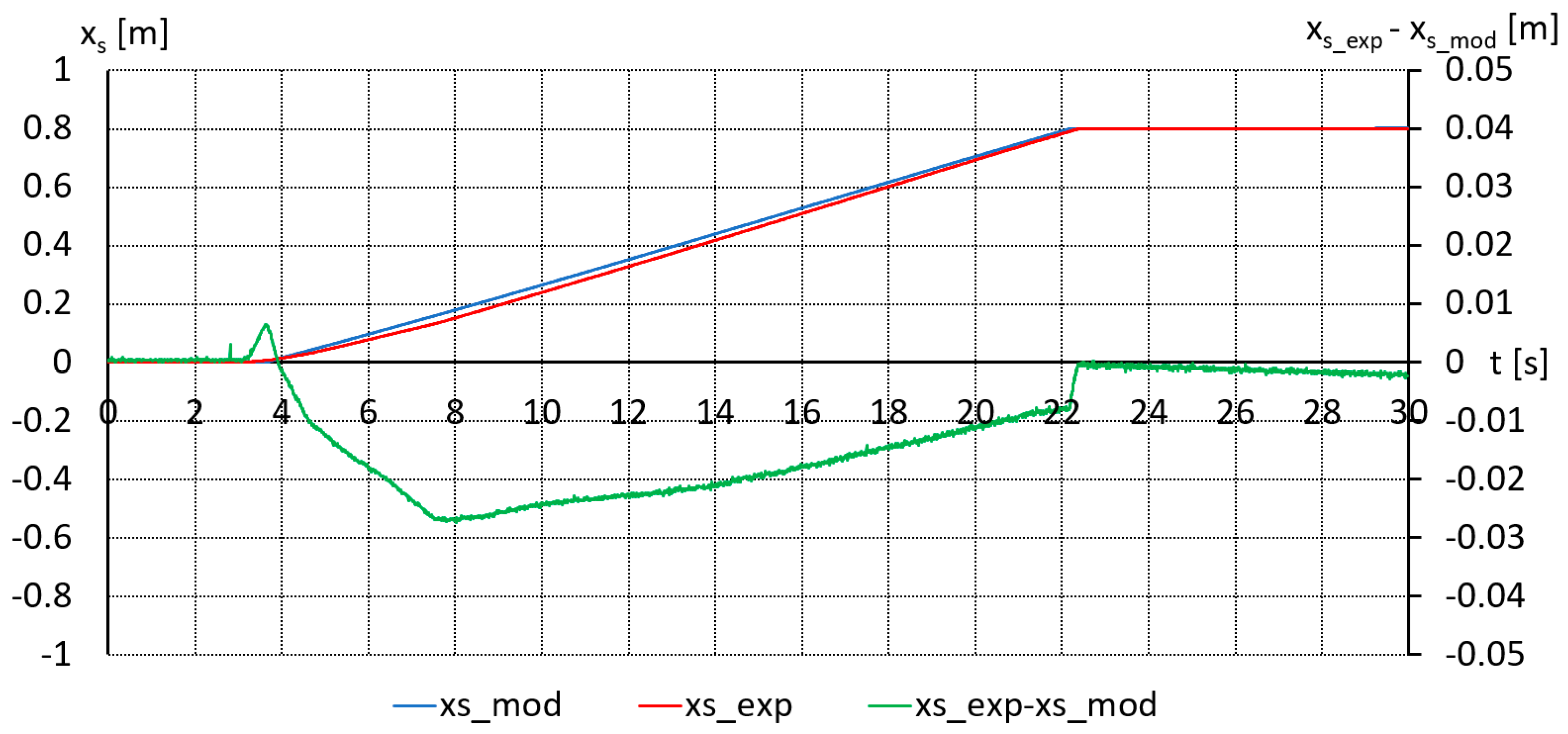
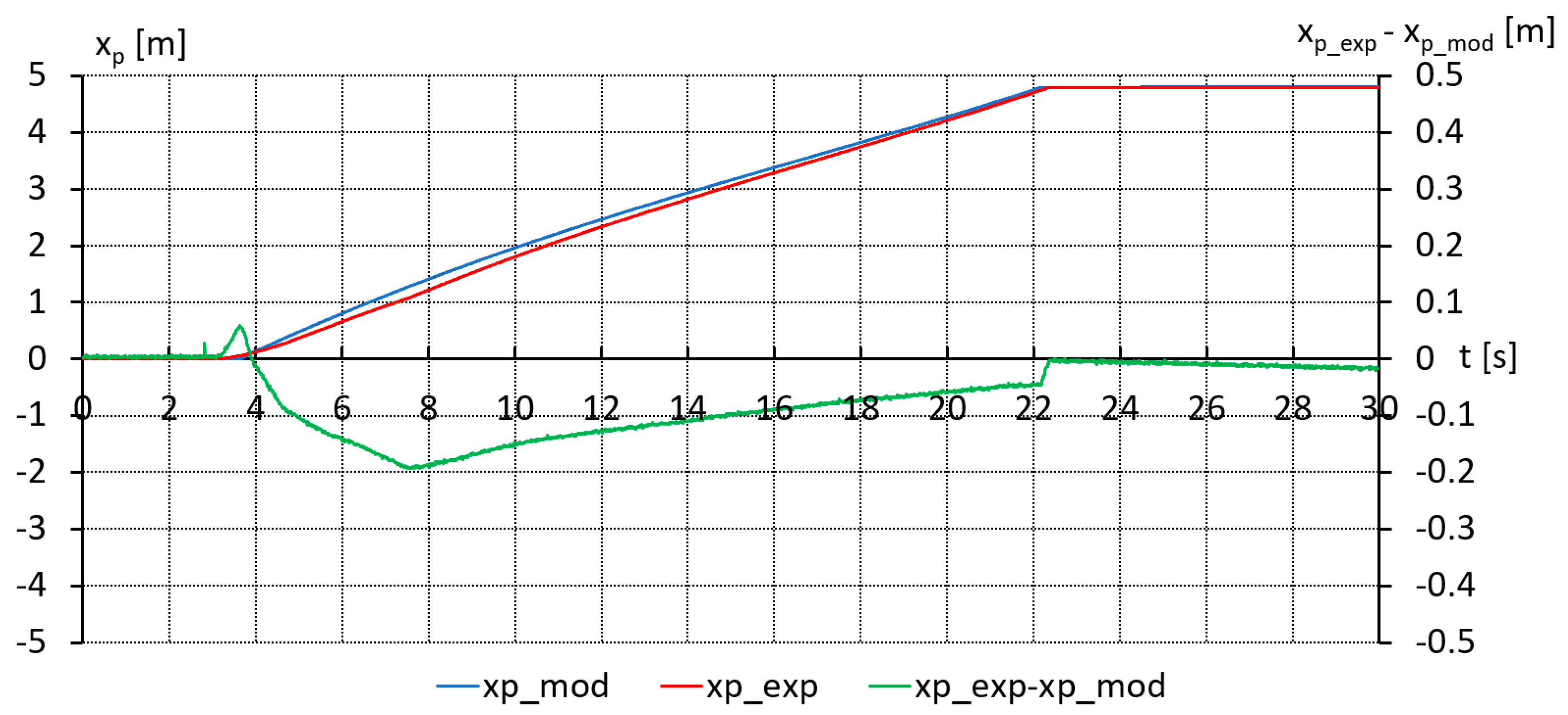
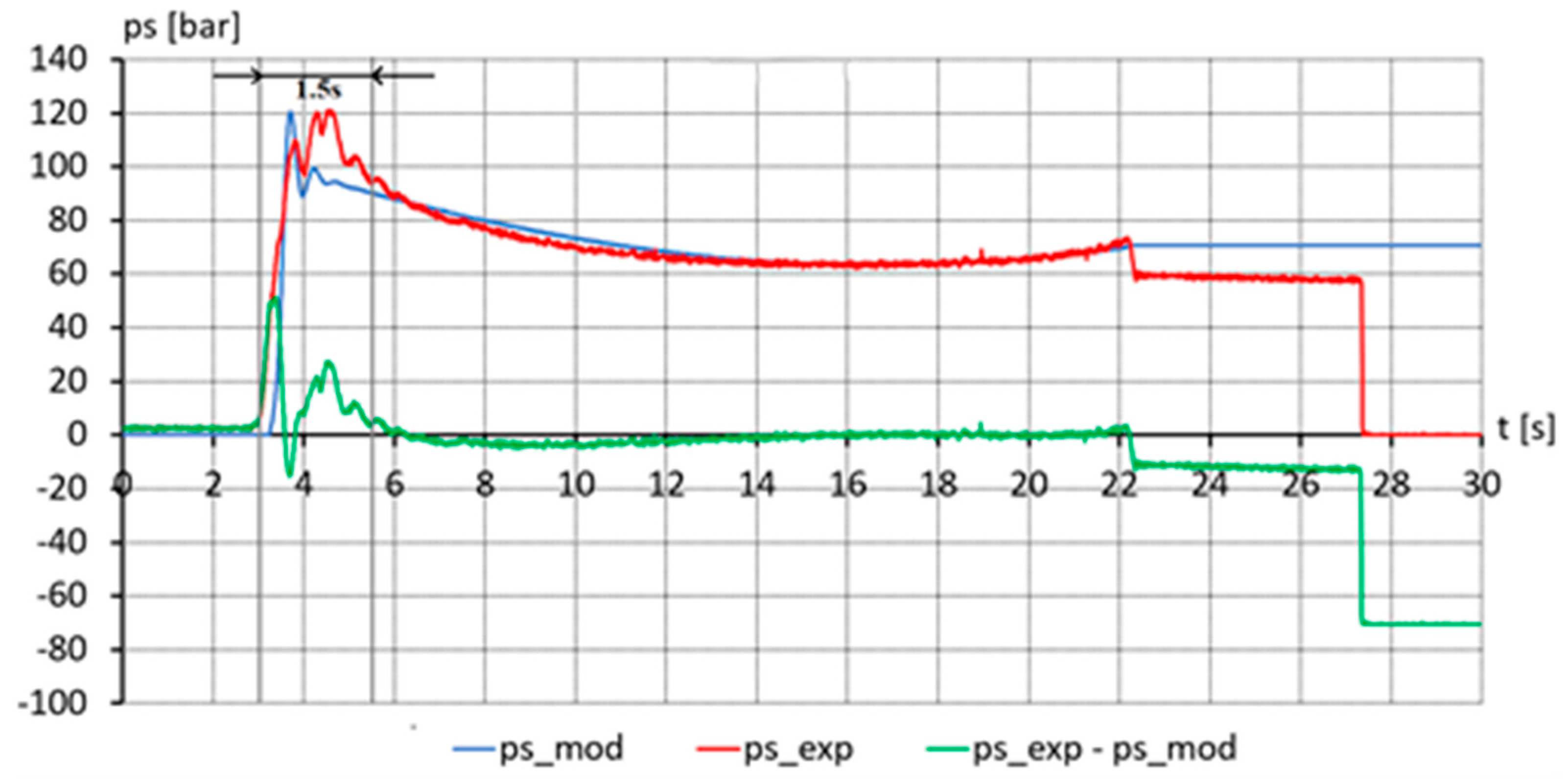
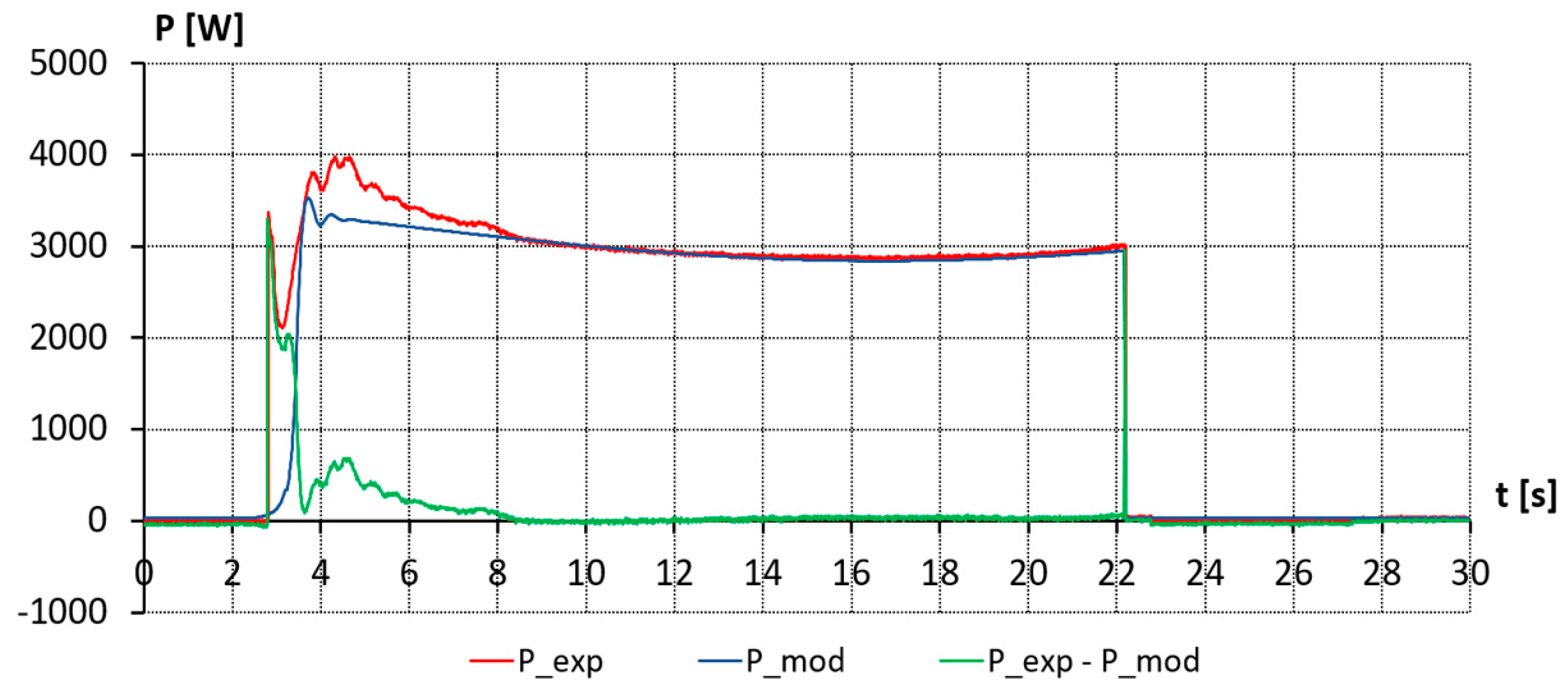
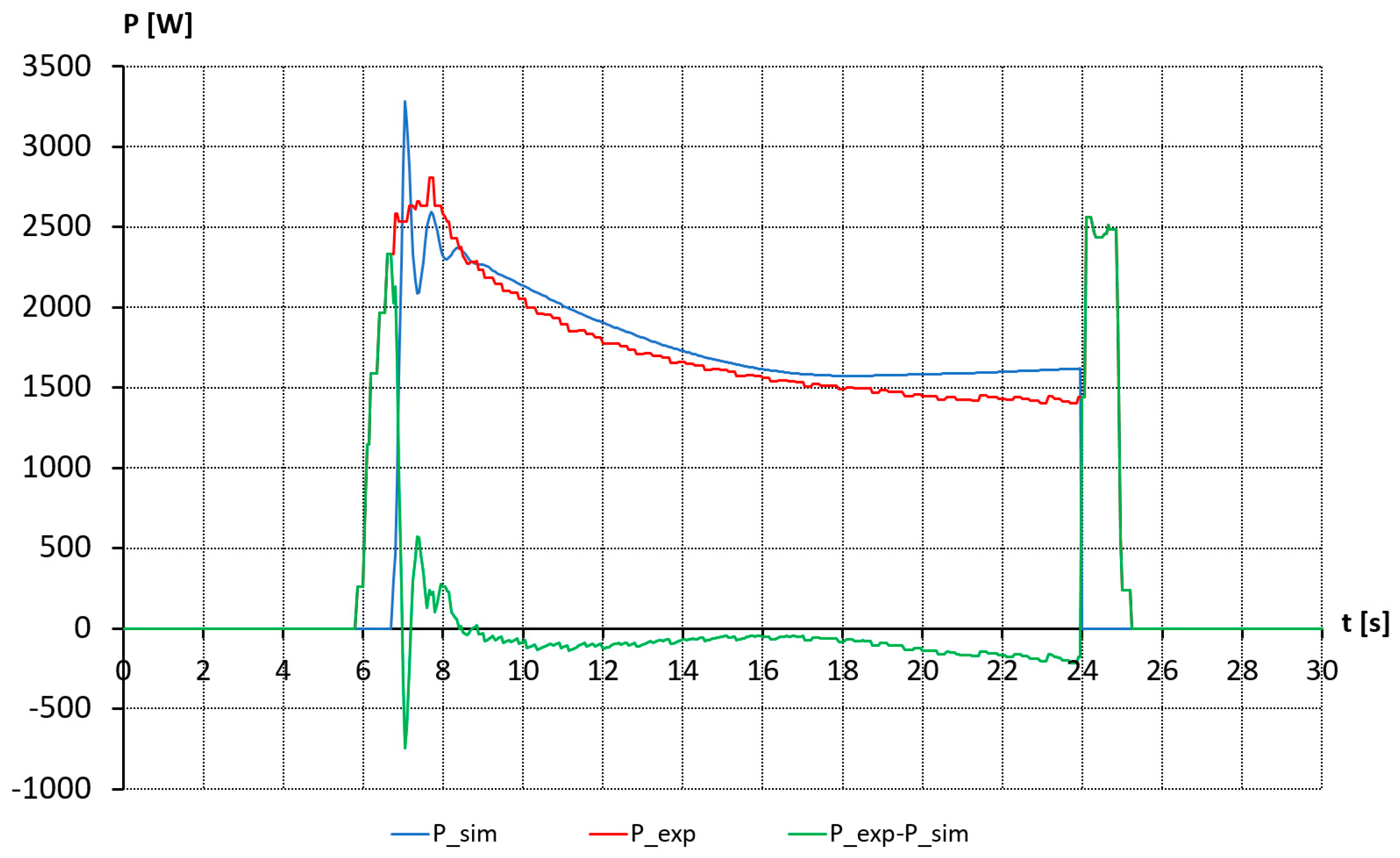
3.3. Model Validation
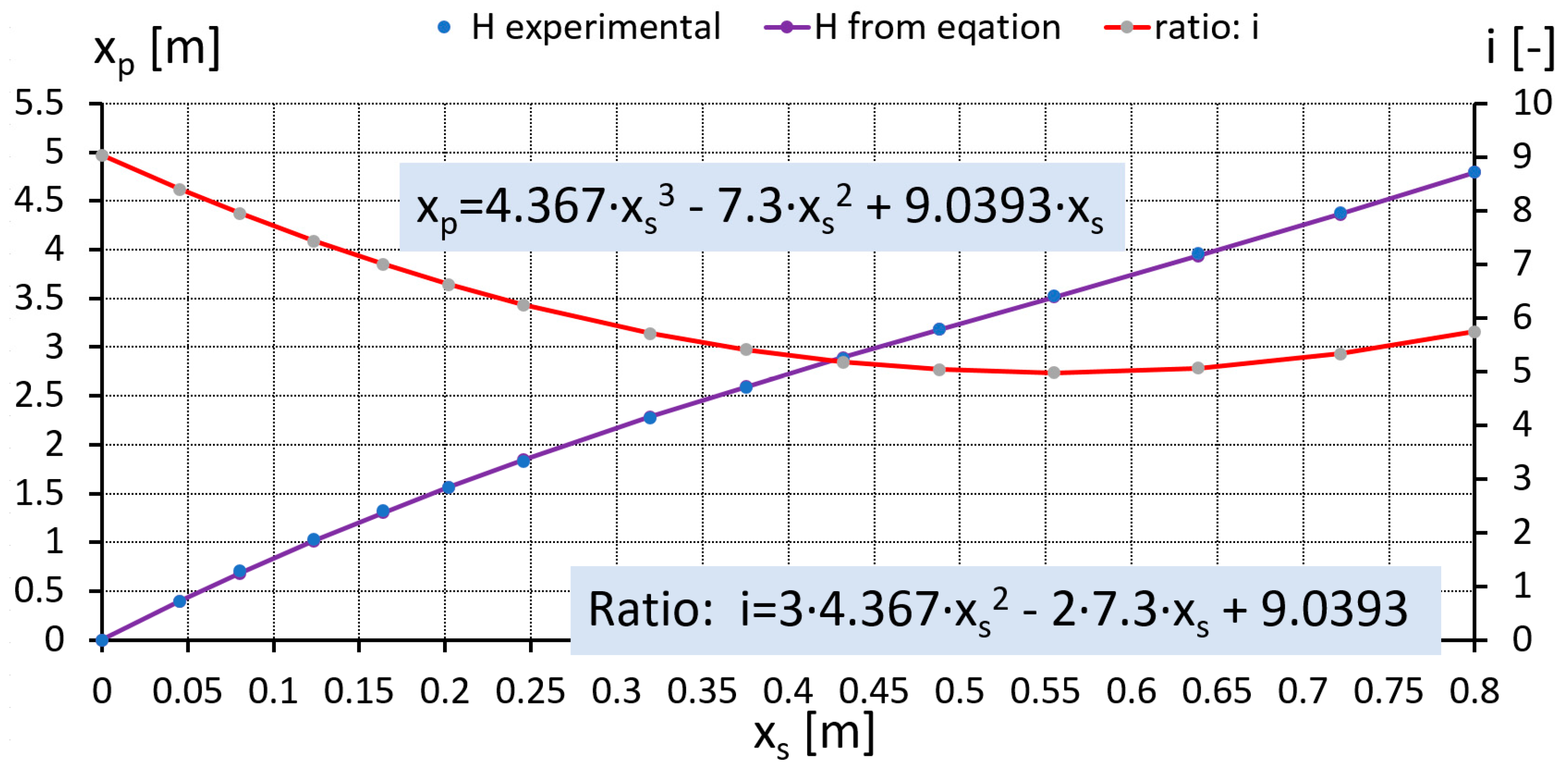
- Displacement of piston rod xs_exp,
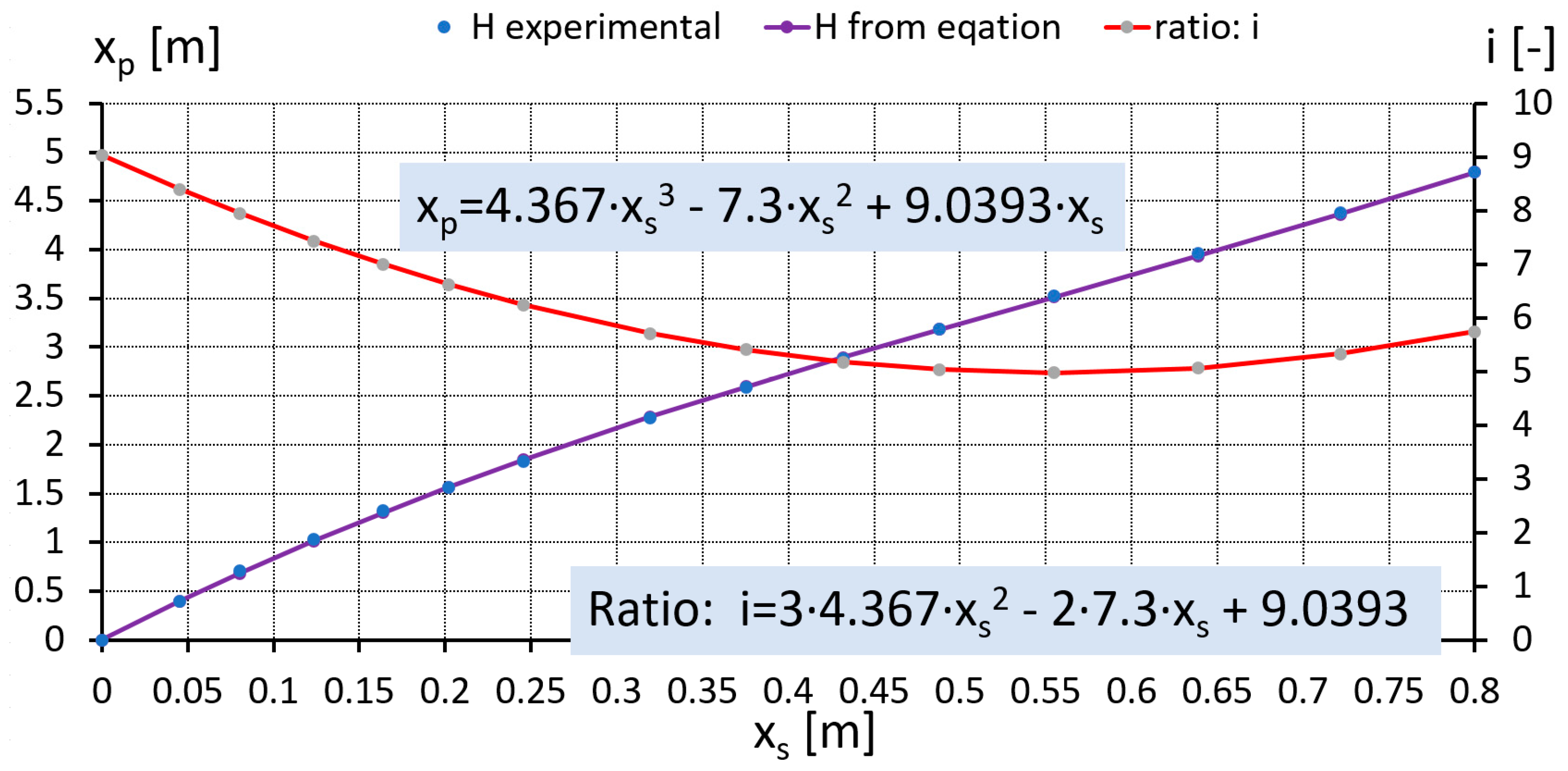
- Height of the platform xp_exp,
- Pressure ps_exp, and
- Consumed electric motor power Pexp.
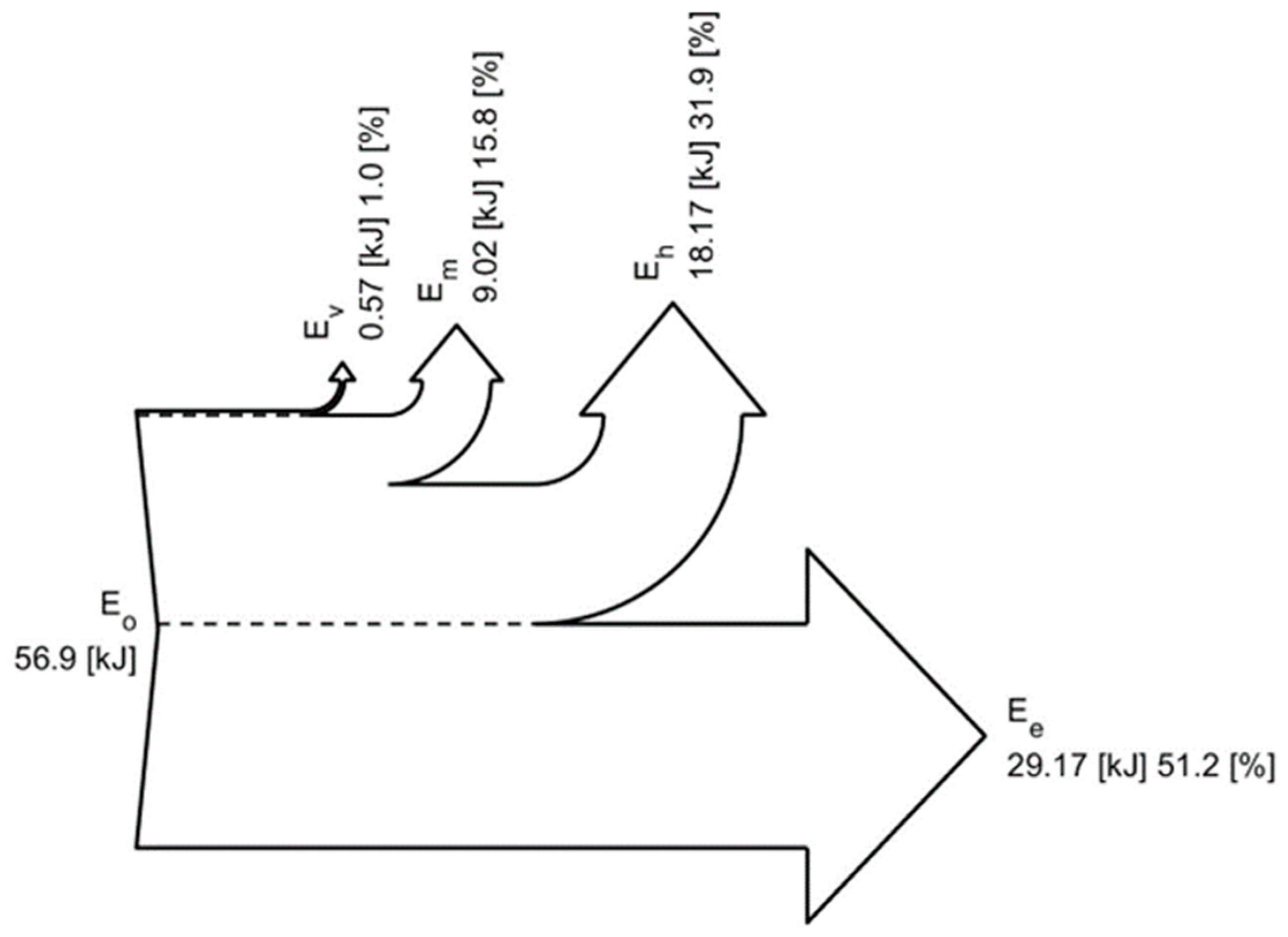
3.4. Results of the Analysis of Conventional Hydraulics
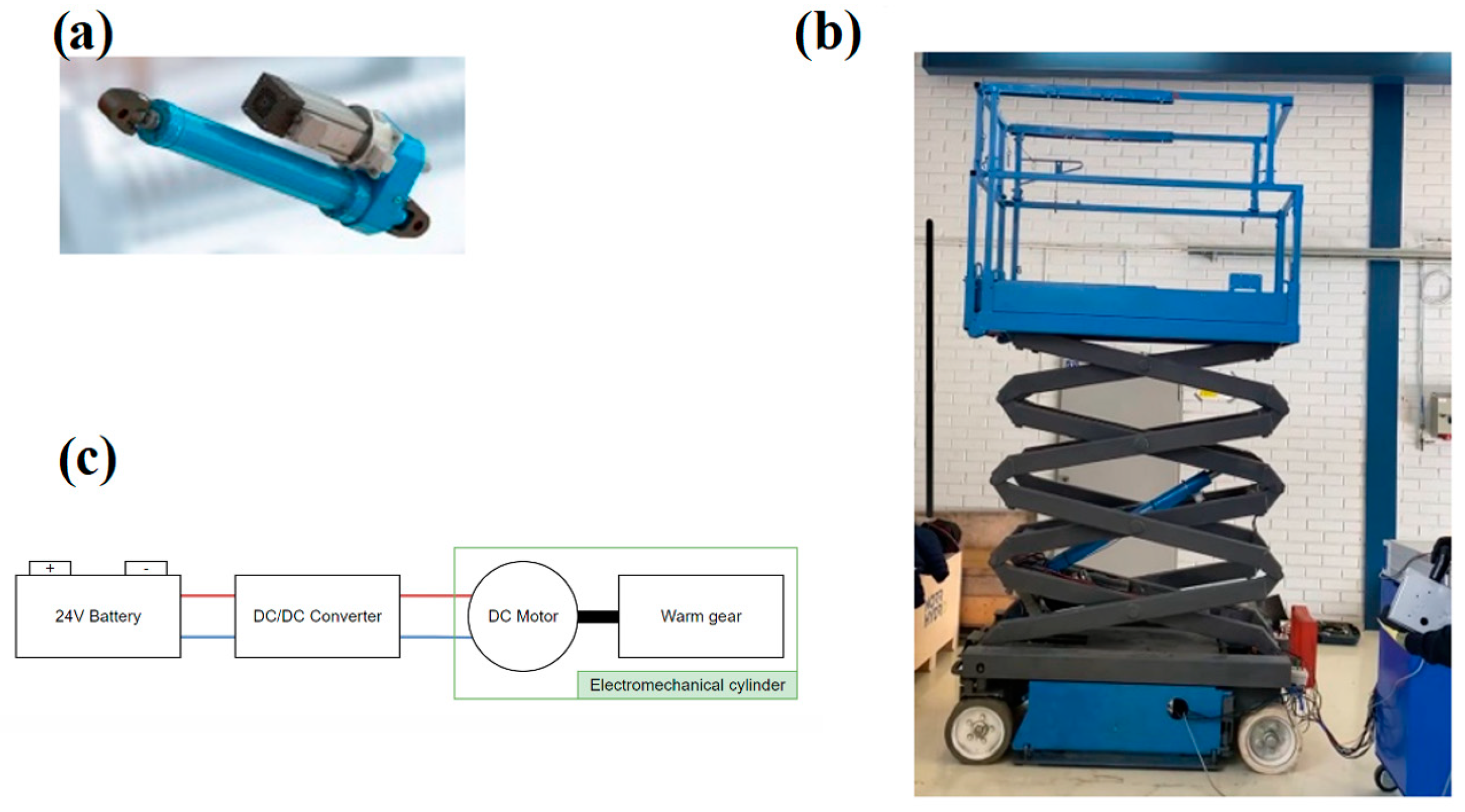
4. Proposed EMA-Based Scissor Lift
4.1. An Overview of the Test Arrangements
4.2. EMA Model
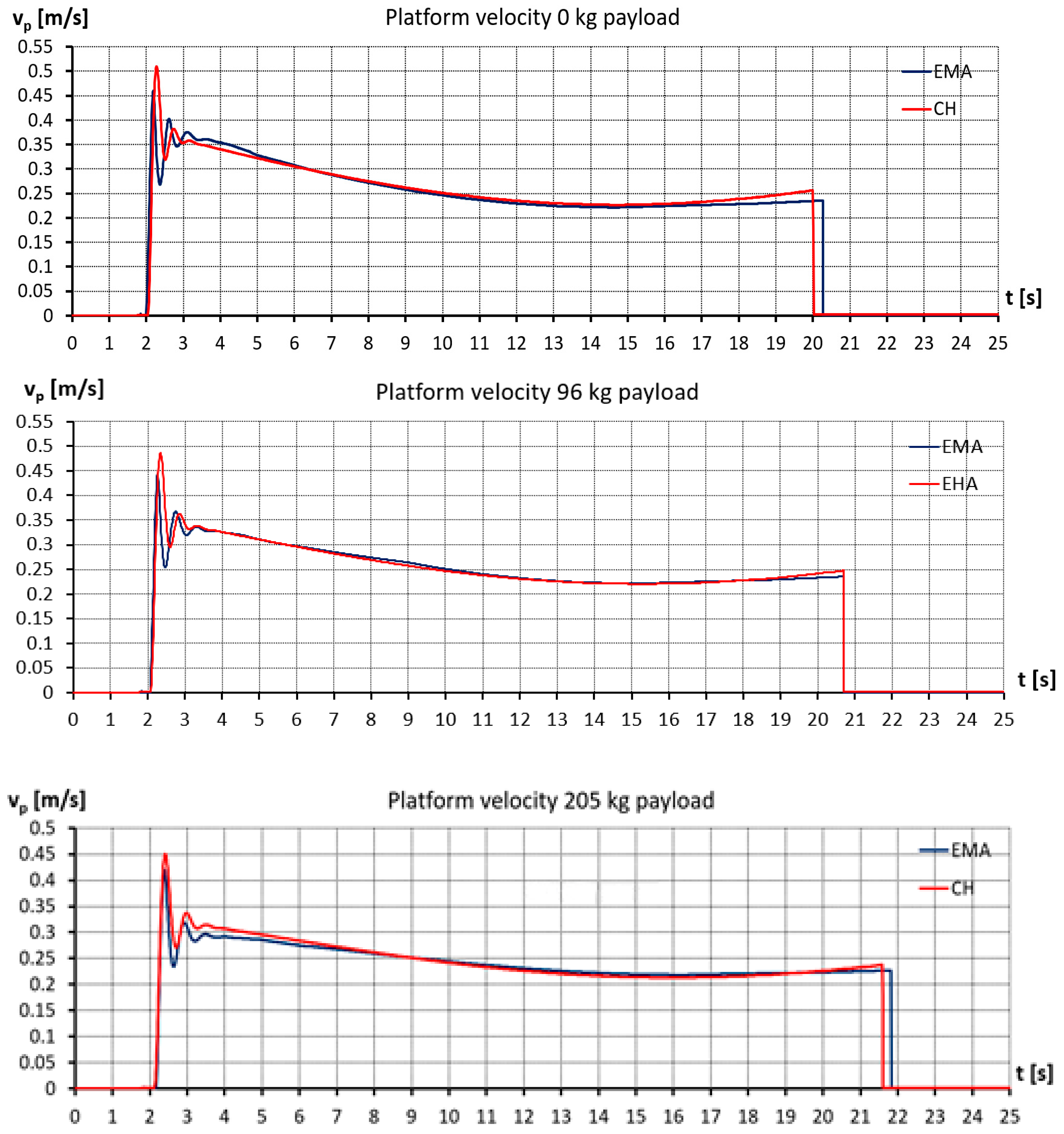
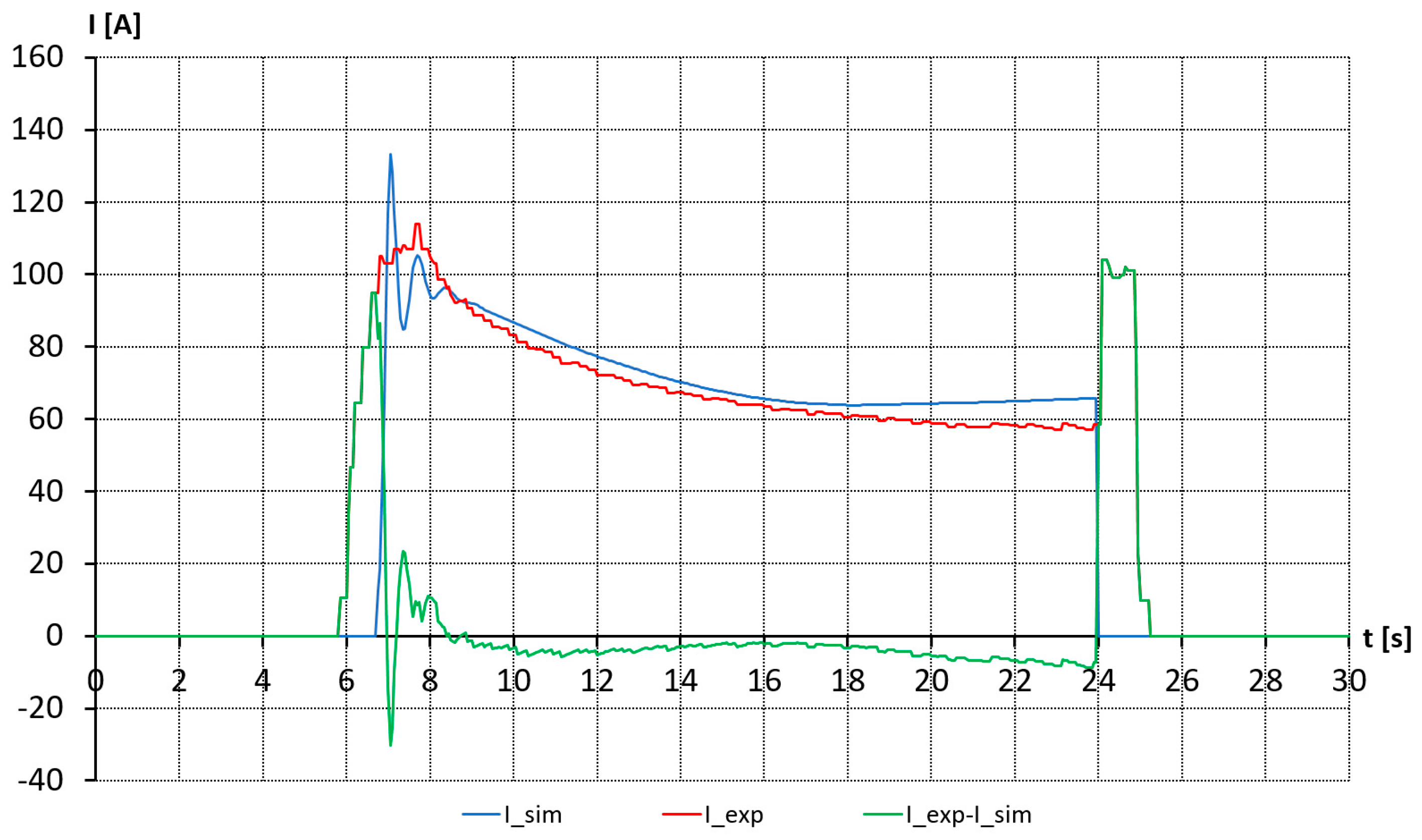
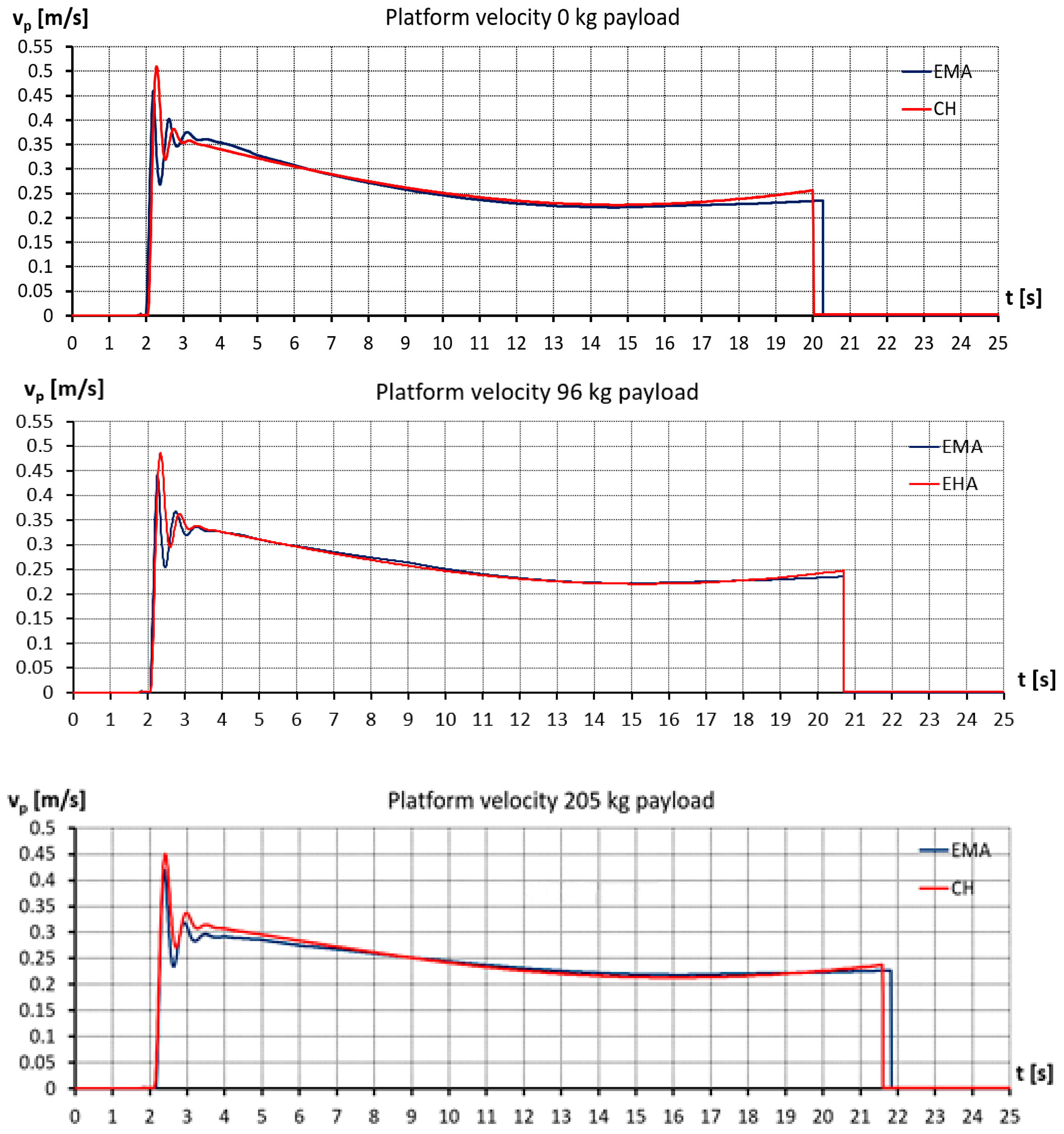
4.3. EMA Model Validation
5. Analysis and Discussion
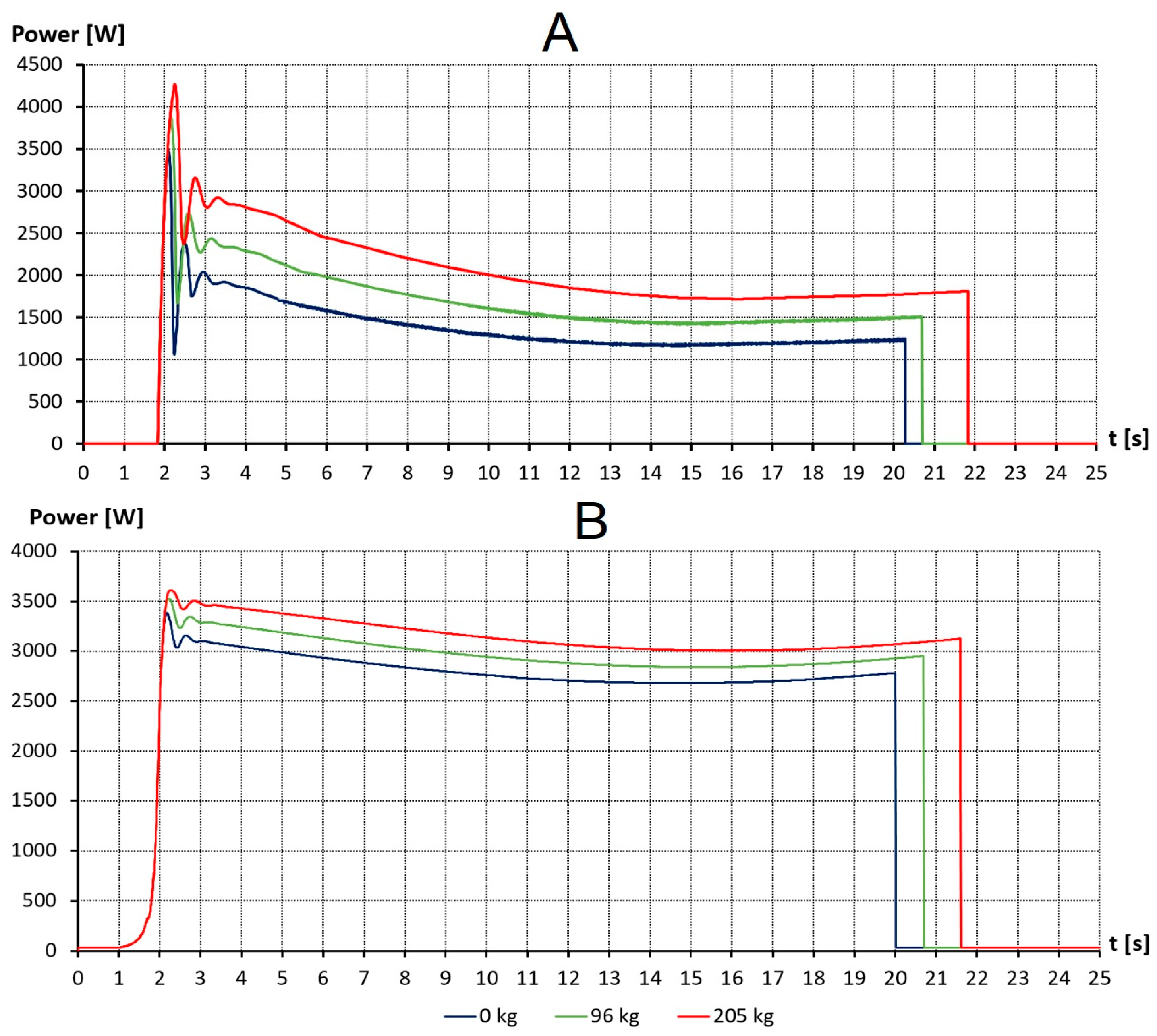
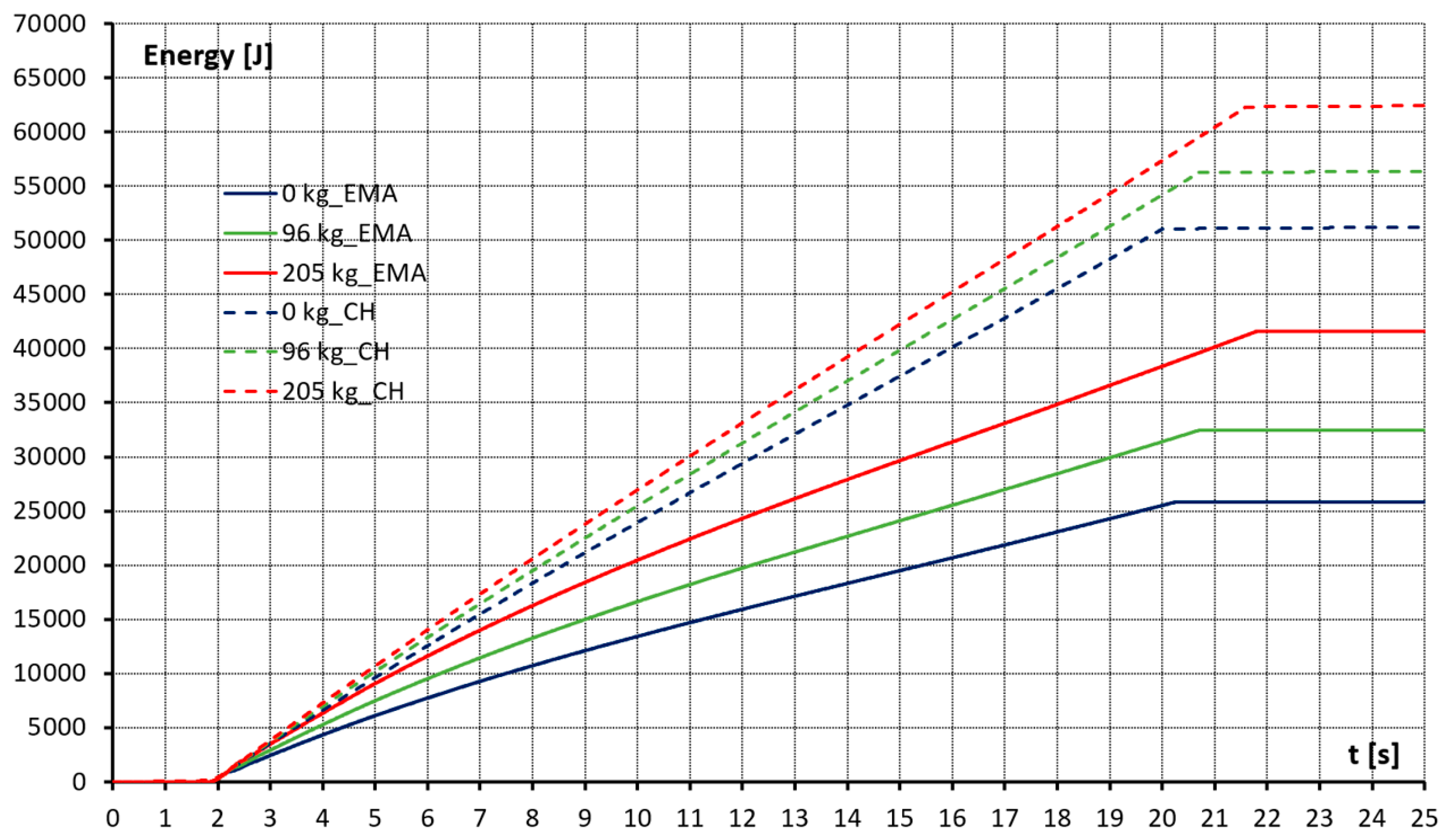
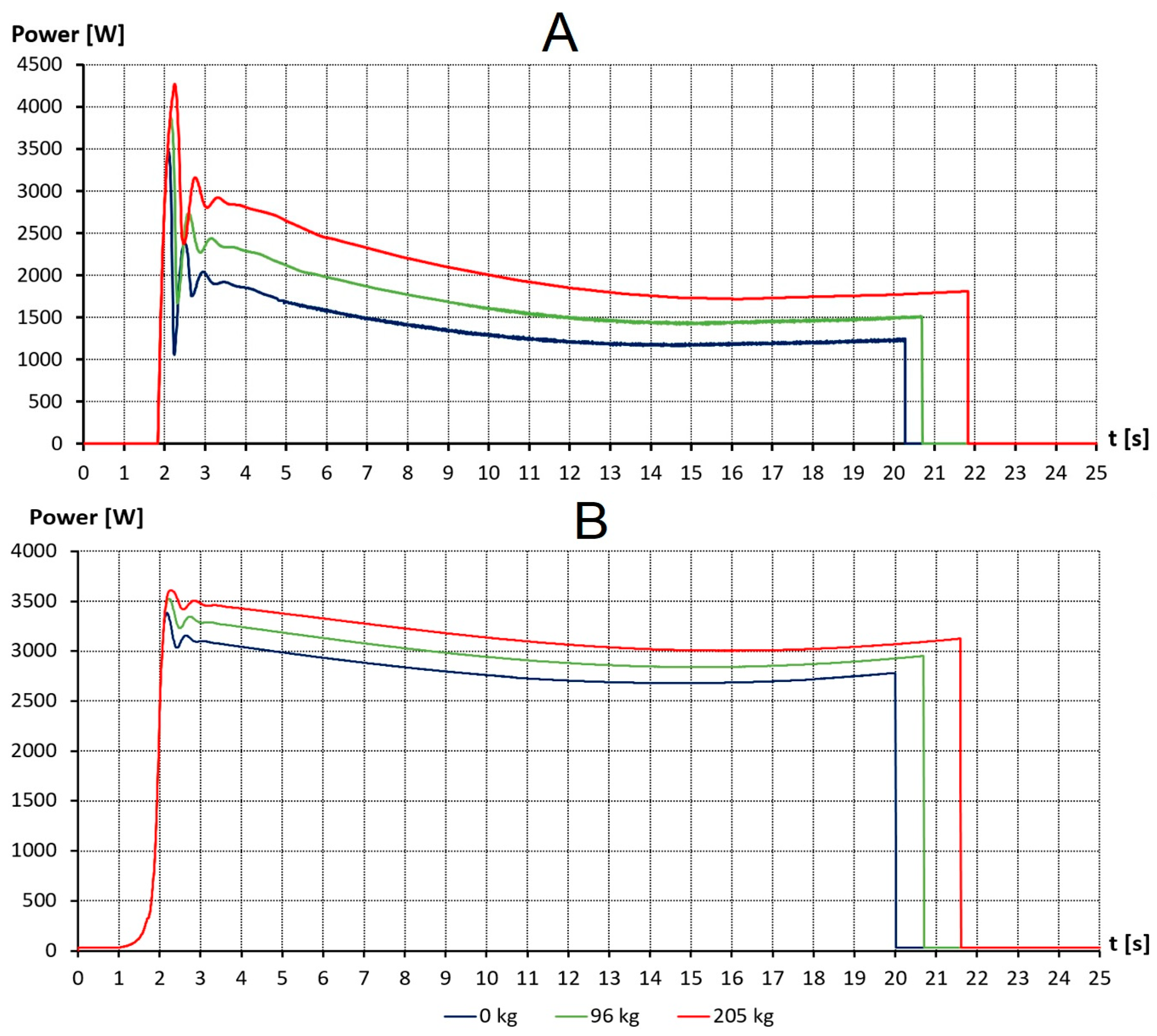
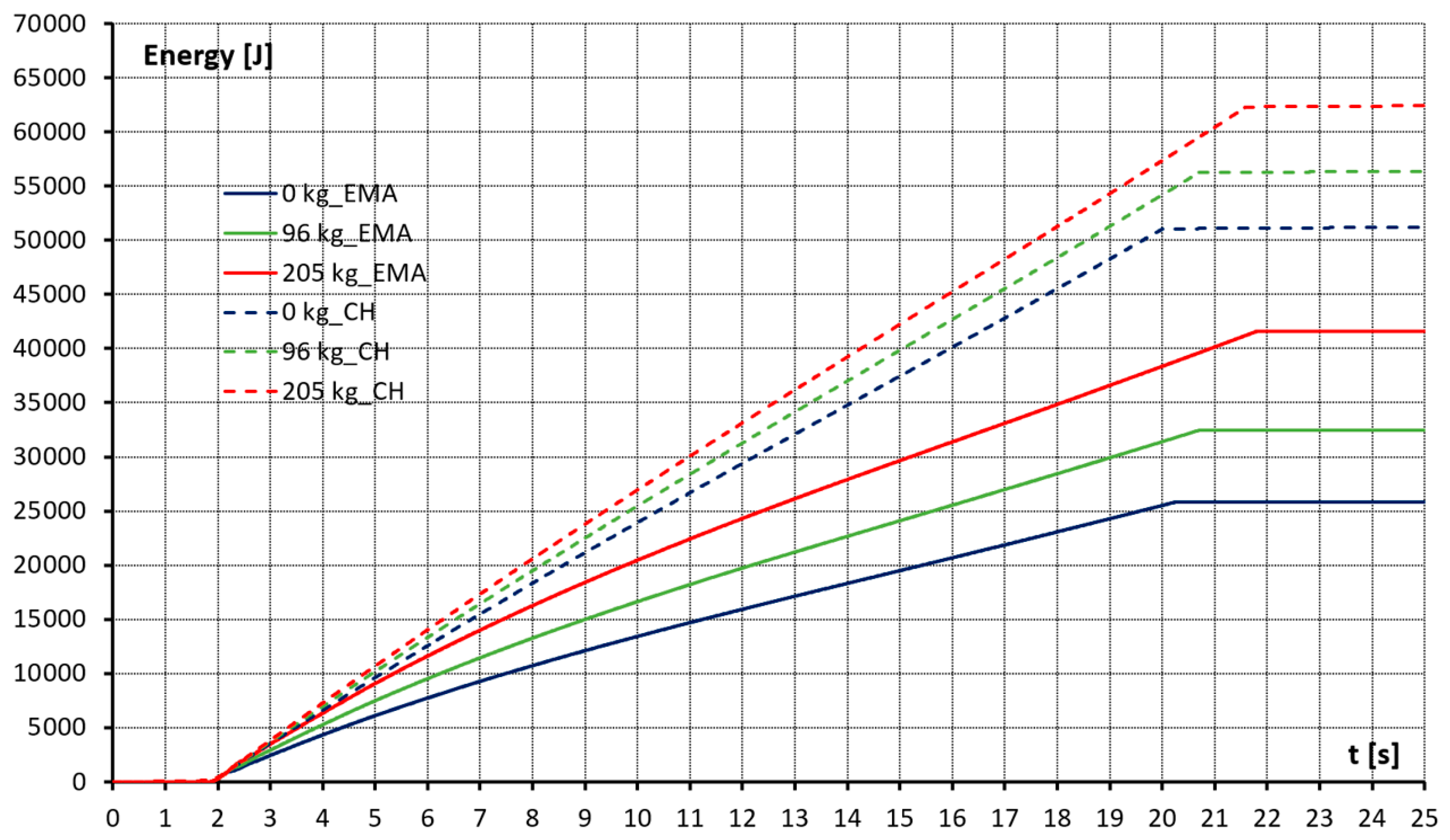
5.1. Power and Energy Consumption Analysis
5.2. Techno-Economic Analysis
6. Discussion and Future Outlook
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Viaggi, R. Annual Economic Report; CECE: Brussels, Belgium, 2021; Available online: https://www.cece.eu/stream/cece-annual-economic-report-2021 (accessed on 14 May 2023).
- Emission Standards: Europe: Nonroad Engines. dieselnet.com. Available online: https://dieselnet.com/standards/eu/nonroad.php (accessed on 14 May 2023).
- Fassbender, D.; Zakharov, V.; Minav, T. Utilization of Electric Prime Movers in Hydraulic Heavy-Duty-Mobile-Machine Implement Systems. Autom. Constr. 2021, 132, 103964. [Google Scholar] [CrossRef]
- Abuowda, K.; Okhotnikov, I.; Noroozi, S.; Godfrey, P.; Dupac, M. A Review of Electrohydraulic Independent Metering Technology. ISA Trans. 2020, 98, 364–381. [Google Scholar] [CrossRef] [PubMed]
- Donkov, V.H.; Andersen, T.; Linjama, M.; Ebbesen, M. Digital Hydraulic Technology for Linear Actuation: A State of the Art Review. Int. J. Fluid Power 2020, 21, 263–304. [Google Scholar] [CrossRef]
- Digital Displacement® Pumps. Available online: https://www.danfoss.com/en/products/dps/pumps/digital-displacement-pumps/digital-displacement-single-and-multiple-outlet-pumps/ (accessed on 14 May 2023).
- INNAS—Fluid Power Innovation. Available online: https://www.innas.com/index.html (accessed on 14 May 2023).
- Axial Piston Pumps AX. Bucher Hydraulics. Available online: https://www.bucherhydraulics.com/en/products/pumps-and-motors/pumps/axial-piston-pumps-ax (accessed on 14 May 2023).
- NorrDigi—Energy Saving Motion Control. Available online: https://www.norrhydro.com/en/norrdigi-digital-hydraulic-solution (accessed on 14 May 2023).
- Minav, T.A.; Heikkinen, J.E.; Pietola, M. Electric-Driven Zonal Hydraulics in Non-Road Mobile Machinery. In New Applications of Electric Drives; Intechopen: Rijeka, Croatia, 2015. [Google Scholar] [CrossRef]
- Koitto, T.; Kauranne, H.; Calonius, O.; Minav, T.; Pietola, M. Experimental Study on Fast and Energy-Efficient Direct Driven Hydraulic Actuator Unit. Energies 2019, 12, 1538. [Google Scholar] [CrossRef]
- Qu, S.; Fassbender, D.; Vacca, A.; Busquets, E. A High-Efficient Solution for Electro-Hydraulic Actuators With Energy Regeneration Capability. Energy 2021, 216, 119291. [Google Scholar] [CrossRef]
- Qiao, G.; Liu, G.; Shi, Z.; Wang, Y.; Ma, S.; Lim, T.C. A Review of Electromechanical Actuators for More/All Electric Aircraft Systems. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 232, 4128–4151. [Google Scholar] [CrossRef]
- Hagen, D.; Padovani, D.; Choux, M. Guidelines to Select Between Self-Contained Electro-Hydraulic and Electro-Mechanical Cylinders. In Proceedings of the 2020 15th IEEE Conference on Industrial Electronics and Applications (ICIEA), Kristiansand, Norway, 9–13 November 2020. [Google Scholar] [CrossRef]
- EX02—Prototype Electric Excavator. Available online: https://www.volvoce.com/global/en/this-is-volvo-ce/what-we-believe-in/innovation/prototype-electric-excavator/ (accessed on 14 May 2023).
- eFuzion: Innovative Technology for a Sustainable Future. YANMAR. Available online: https://www.yanmar.com/global/about/ymedia/article/efuzion.html (accessed on 14 May 2023).
- DaVinci AE1932 All-Electric Scissor Lift. Available online: https://www.jlg.com/en/equipment/scissor-lifts/electric/davinci-series-scissor-lifts/ae1932 (accessed on 14 May 2023).
- New All-Electric Bobcat Compact Track Loader Breaks Fresh Ground. Industrial Vehicle Technology International. Available online: https://www.ivtinternational.com/news/hybrid-electric-vehicles/new-all-electric-bobcat-compact-track-loader-breaks-fresh-ground.html (accessed on 14 May 2023).
- Inc, Moog Construction Article: Komatsu’s All Electric Wheel Loader Prototype in Partnership with Moog at Bauma 2022. Available online: https://www.moogconstruction.com/News/komatsu-s-all-electric-wheel-loader-prototype-in-partnership-wit.html (accessed on 14 May 2023).
- VÖGELE. Bauma 2022|New Mini Road Pavers from VÖGELE. Available online: https://www.wirtgen-group.com/en-fi/news/voegele/mini-500e-and-mini-502e/ (accessed on 14 May 2023).
- Bao, Z. Study on Simulation of System Dynamic Characteristics of Hydraulic Scissor Lift Based on Load-Sensing Control Technology. IOP Conf. Ser. Mater. Sci. Eng. 2019, 612, 042036. [Google Scholar] [CrossRef]
- Stawiński, Ł.; Kosucki, A.; Morawiec, A.; Sikora, M. A New Approach for Control the Velocity of the Hydrostatic System for Scissor Lift with Fixed Displacement Pump. Arch. Civ. Mech. Eng. 2019, 19, 1104–1115. [Google Scholar] [CrossRef]
- Motiomax by Norrhydro. Available online: https://www.norrhydro.com/en/motiomax (accessed on 14 May 2023).
- Electricity Prices. Global Petrol Prices. Available online: https://www.globalpetrolprices.com (accessed on 14 May 2023).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Main Parameters |
|---|---|
| Pump | qp = 3.8 cc/rev; pn = 210 bar |
| Cylinder | D = 80 mm; stroke length = 800 mm |
| DC motor | Voltage: 24 V; Pn = 3 kW; nn = 4500 rpm |
| 96 kg | 205 kg | |||
|---|---|---|---|---|
| Parameter | Average Difference between Simulation and Experimental | Wavg [%] | Average Difference between Simulation and Experimental | Wavg [%] |
| xs [m] | 0.0115 | 1.44 | 0.0083 | 1.04 |
| ps [bar] | 10.82 | 6.01 | 5.32 | 2.96 |
| xp [m] | 0.07 | 1.46 | no exp. data | |
| Pel [W] | 113.24 | 2.83 | 182.45 | 4.56 |
| Parameter | 0 kg | 96 kg | 205 kg |
|---|---|---|---|
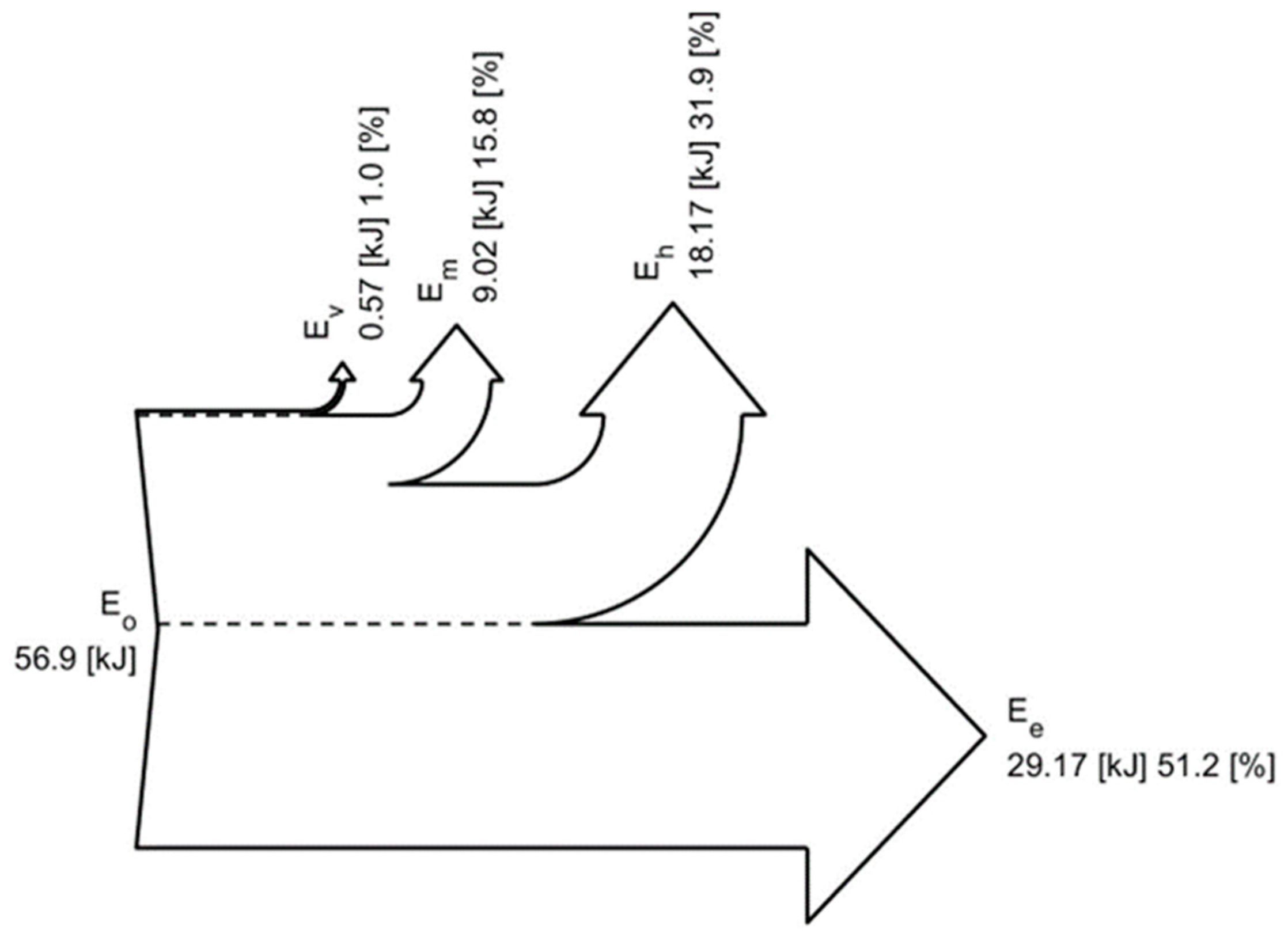
| Eo [kJ] | 52.2 | 56.9 | 63 |
| Ev [kJ] | 0.56 | 0.57 | 0.60 |
| Em [kJ] | 8.25 | 9.02 | 9.98 |
| Eh [kJ] | 18.03 | 18.17 | 18.40 |
| Ee [kJ] | 25.34 | 29.17 | 34.01 |
| η [%] | 48.6 | 51.2 | 54 |
| Component | Main Parameters |
|---|---|
| Mechanical cylinder | Stroke 800 mm Lead 0.64 mm/rev |
| DC motor | Voltage: 24 V; Pn = 4 kW; nn = 3000 rpm |
| Payload, kg | Conv. Sys. Number of Cycles | EMA. Sys. Number of Cycles |
|---|---|---|
| 96 | 344 | 592 |
| 205 | 311 | 462 |
| Country | Electricity Price, C/kWh | Payload, kg | Conv. Sys. Expenses, EUR | EMA. Sys. Expenses, EUR | Economy, % |
|---|---|---|---|---|---|
| Poland | 0.177 | 96 | 146.67 | 85.15 | 41.95 |
| 205 | 162.25 | 109.03 | 32.81 | ||
| Finland | 0.418 | 96 | 346.38 | 201.09 | 41.95 |
| 205 | 383.17 | 257.49 | 32.81 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stawiński, Ł.; Zakharov, V.; Kosucki, A.; Minav, T. Electromechanical Actuator-Based Solution for a Scissor Lift. Actuators 2023, 12, 394. https://doi.org/10.3390/act12100394
Stawiński Ł, Zakharov V, Kosucki A, Minav T. Electromechanical Actuator-Based Solution for a Scissor Lift. Actuators. 2023; 12(10):394. https://doi.org/10.3390/act12100394
Chicago/Turabian StyleStawiński, Łukasz, Viacheslav Zakharov, Andrzej Kosucki, and Tatiana Minav. 2023. "Electromechanical Actuator-Based Solution for a Scissor Lift" Actuators 12, no. 10: 394. https://doi.org/10.3390/act12100394
APA StyleStawiński, Ł., Zakharov, V., Kosucki, A., & Minav, T. (2023). Electromechanical Actuator-Based Solution for a Scissor Lift. Actuators, 12(10), 394. https://doi.org/10.3390/act12100394