1. Introduction
The study and application of intelligent control techniques, such as fuzzy logic and neural networks, have gained widespread recognition in recent years. The basis of these techniques consists of learning in a prescribed manner the input–output behavior of a system to subsequently be controlled [
1]. The importance of these types of techniques is found in nonlinear systems, variants in time, and those that are subjected to different types of disturbances [
2]. Manipulator robots have complex nonlinear dynamics that can make accurate and robust control difficult. In today’s manufacturing environments, velocity and accuracy requirements increase when compared to earlier generations of robots. However, the efficiency of fixed-gain PID controllers often is limited for providing adequate performance in real-time operations of robot motion [
3].
Since there are no adaptive or learning capabilities, control accuracy is significantly affected when a variation due to unknown frictions and disturbing torques is presented during motion control in laser manufacturing applications, such as cutting, welding, marking, and additive 3D printing [
4]. The main purpose of controlling a manipulator robot is to accomplish a specific task, such as payload transport [
5], and motion profile tracking for material processing [
6], among others. To perform the required tasks, the manipulator is commanded for reaching the desired position, velocity, acceleration, or force at a specific time [
7]. The nonlinear nature of manipulator robots makes it difficult to obtain an adequate control law to perform different programmed tasks. There are computational methods that improve the control laws efficiency, such as the artificial neural networks [
8] that are used to online update the control parameters value to improve the robotic system’s closed-loop response. The exhibited adaptive behavior learns from the nonlinear nature of the robot intelligently. So using neural networks for the tuning of the parameters of a controller applied to a nonlinear and strongly coupled system represents a great advantage. The recent renewed interest in neural networks can be attributed to different factors, one of them is that different learning techniques have been developed for sophisticated artificial neural network architectures, which are capable of eliminating the limitations of the past associated with simple neural networks [
9]. Neural networks are parallel computer models that mimic a human’s learning process. The networks process information by adapting their connections and nodes, based on the information they are given [
10]. One important feature is the intrinsic parallel architecture that allows fast computation of the solution. This is achieved when the networks are implemented on digital computers or in specialized hardware [
11].
Artificial neural networks (ANN) have been used for the control of manipulator robots for different applications in recent years. In [
12], a trajectory planning methodology of a manipulator robot is proposed through the design of an adaptive robust controller that uses a neural network activated with radial basis functions; this is done to solve nonlinearity and uncertainty problems and improve the performance during trajectory tracking. In [
13], a fixed-time control algorithm for the trajectory tracking of manipulator robots with uncertainty and input saturation is designed, which combines the non-singular terminal sliding mode control with the reinforcement learning method. To compensate for the saturation of the actuators due to the effect of joint torque overflow, a nonlinear anti-windup compensator is designed. Authors in [
14] introduce a multi-layer neural network with iterative learning for controller design to compensate for the dynamics of an articulated industrial manipulator robot for trajectory tracking tasks. The iterative learning control commands the robot motion, which corresponds to a set of desired joint trajectories. Additionally, the torques of the input/output trajectories are used for training the inner control loop through inverse dynamics. In this scheme, the trajectory is used as the input desired joint of the robot, and the output is related to the commanded robot motion. In [
15], a modified artificial neural network algorithm is suggested to be applied as an adaptive adjustment algorithm. A mathematical modulation is introduced to promote the scanning form, and no initial parameters are set. The suggested algorithm is tested to select the gains, and an appropriate configuration is selected. This algorithm is applied for improving a PID-like joint motion controller for a manipulator robot. In [
16], the output error constraints and input saturation of robot manipulators are considered and presented with a trajectory tracking controller to attend to these requirements simultaneously through an artificial neural network structure with radial basis functions that can approximate the pooled uncertainties. In [
17], a deep convolutional neural network is designed to implement a fractional order sliding mode control strategy for trajectory tracking control in manipulator robots. The neural network compensates for system uncertainty without the need to know the upper bounds, thus the controller switching gain is greatly reduced. The main advantage of the controller used lies in the elimination of chattering, so continuous control signals can be obtained and applied in practical applications. In [
18], a control scheme is proposed to handle the unknown dynamics and the external disturbances in a manipulator robot by combining a self-tuning PID structure with an artificial neural network using radial basis activation functions to handle the different uncertainties. In [
19], to track the trajectory of a robot and supply constant force during contact working conditions, a PID fuzzy neural network controller is developed. For manufacturing applications, changing the contact force during machining operations will affect the quality, so it is crucial to maintain them constantly throughout the process. For the parameters of the PID controller to be adjusted quickly and effectively, a fuzzy algorithm is proposed that includes neural networks in such a way that the controller has two functions: path following and bounded shifting online whilst maintaining the contact force constant. In [
20], an adaptive neural control scheme for manipulator robots that includes actuator dynamics under model uncertainty is proposed based on prescribed performance without measuring input current, acceleration, or velocity. A neural adaptive second-order PID controller is combined with an acceleration velocity observer. The proposed method demonstrates that semi-global bounds are found for tracking and state observation errors, and they eventually converge in a small circle about the origin.
With the B-spline artificial neural networks (Bs-ANN), adaptive control and modeling of systems are possible both online and with nonlinearities taken into account [
21]. In the literature, the estimation of harmonics and DC offset component of multi-frequency oscillating electric signals [
22], control of electric power systems [
23], different types of electric motors, such as DC shunt [
24], induction [
25] and permanent magnet synchronous [
9] as well as unmanned aerial vehicles [
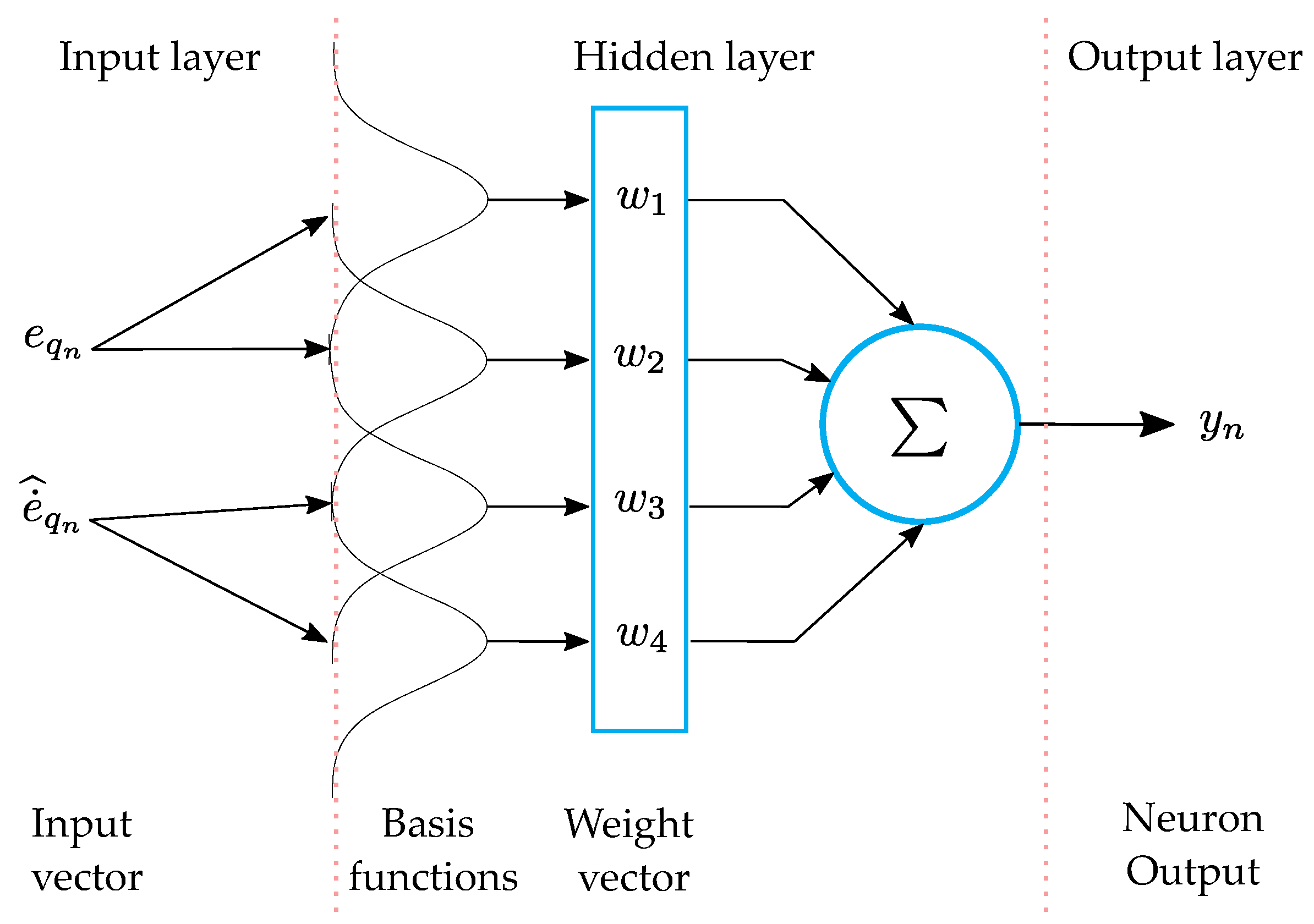
26] are some examples of the successful implementation of B-spline neural networks. Nevertheless, there is no evidence of the previous implementation in anthropomorphic manipulator robots. The main advantage of the B-spline neural network is that it can limit the input to a set of values defined in the base function. This reduces computational effort and time because there are only a limited number of basis functions involved in the output; not all weights need to be calculated every time iterations are performed [
26]. The proposal allows calculating and updating the values of the parameters of the proposed controller through the neural network for each operating condition of the robot. A proper design requires prior information: the maximum and minimum values for the input signal and defining the shape of the basis functions. This information allows for limiting the input space of the B-spline neural networks, which improves their convergence and stability in adaptation. Additionally, this information is used to determine the optimal weights for the neural network [
27]. The B-spline neural networks used in this work are created by third-order uni-variable basis functions considering that the input signal is bounded.
The main contribution of this work is a new neural adaptive robust motion trajectory tracking control technique based on output feedback for a very important class of nonlinear robotic manipulator systems used in applications of laser manufacturing. In this context, advantages and differences with respect to other relevant contributions reported in the literature are as follows. Position measurements are only required. Time derivatives of measured output signals are not requested. Accurate real-time estimation of different types of disturbances is unnecessary. B-spline artificial neural networks are used correctly to prevent high-gain control actions to suppress unknown time-varying disturbances. The number of control parameters that need to be adaptively adjusted is lessened. Dependency on detailed nonlinear mathematical modeling of the manipulator robot system is reduced. Robustness against external disturbances, such as external vibrating torques, is also obtained. Moreover, the introduced output feedback adaptive neural control design approach can be extended for other architectures of complex nonlinear robotic systems.
A summary of the contents of the manuscript is as follows. The robotic system model is described in
Section 2. The robot motion control approach is presented in
Section 3. In
Section 4, the artificial neural networks-based robot motion control is described. Subsequently, some numeric simulation experiments are presented in
Section 5 to highlight the performance of the introduced methodology. Finally, some conclusions and remarks are mentioned in the conclusions section.
3. Robot Motion Control Synthesis
The mathematical model (
7) has been widely used to describe the controlled dynamics of several architectures of complex nonlinear robotic systems [
28,
29].From Equation (
7), the tracking error dynamics on controlled nonlinear robotic system trajectories can be expressed as follows:
with
where
denotes an auxiliary (virtual) control input vector.
The trajectory tracking error vector is with for . Here, stands for angular position reference trajectories planned for the operation of the robotic system.
In the present study, the integral reconstruction approach of velocity state variables is suitably exploited [
31]. In this fashion measurements of velocity signals are unnecessary. Dependence on disturbed nonlinear dynamic system models is also reduced. Furthermore, differentiation of generalized coordinates with respect to time is not requested, avoiding the possible generation of undesirable corrupting noise during the measurement signal processing. Thus, from Equation (
12), the integral reconstructor of the reference trajectory tracking error velocity vector is proposed as follows:
For robust control design purposes,
is considered a completely unknown time-varying disturbance vector to be actively rejected, which can be approximated into a self-adjusting, very small window of time by the Taylor series polynomial expansion
Moreover, parameter vectors of the disturbance signal model (
15),
and
, are assumed to be unknown as well. Small uncertainties in components of the matrix
and dynamic modeling errors could be also considered into the disturbance vector
. In contrast to other active disturbance rejection control approaches, the real-time estimation of disturbances and time derivatives of position output signals is not required in the present contribution.
Then, the real and reconstructed tracking error velocity vectors holds the following relationship:
where vector parameters
and
are also assumed to be unknown, which depend on initial conditions of the nonlinear robotic system and parameters of the polynomial signal model (
15). The interested reader on integral reconstructors as an alternative to bypass time derivatives of measurement signals and design of asymptotic state observers is referred to the contribution [
31].
The auxiliary control vector
is proposed as follows
where
for
, and
stands for the
integral respect to time. Here, integral error action is properly embedded into auxiliary control to actively compensate disturbances
as well as differences between real and reconstructed velocity vectors as described by Equation (
16).
By considering the torque controllers defined by
the closed-loop tracking error dynamics results in
Then, the gain matrices are suitably selected as matching the following
Hurwitz stable characteristic polynomials:
5. Numeric Simulation Results
The proposed motion control scheme was evaluated through several numeric simulations. During the first scenario, the proposal is implemented for motion control in joint-space mode. Secondly, the approach is used in motion control in the operative space, where the independence of a precise robot dynamical model is exhibited, and control gains are suitably updated online. Finally, the proposed control scheme is compared with a PID-like control scheme when the system is subjected to external disturbance torques. It is important to note that in the different laser manufacturing applications, the precise motion of the robot is required, even in the presence of disturbances, as addressed in the numeric experiments.
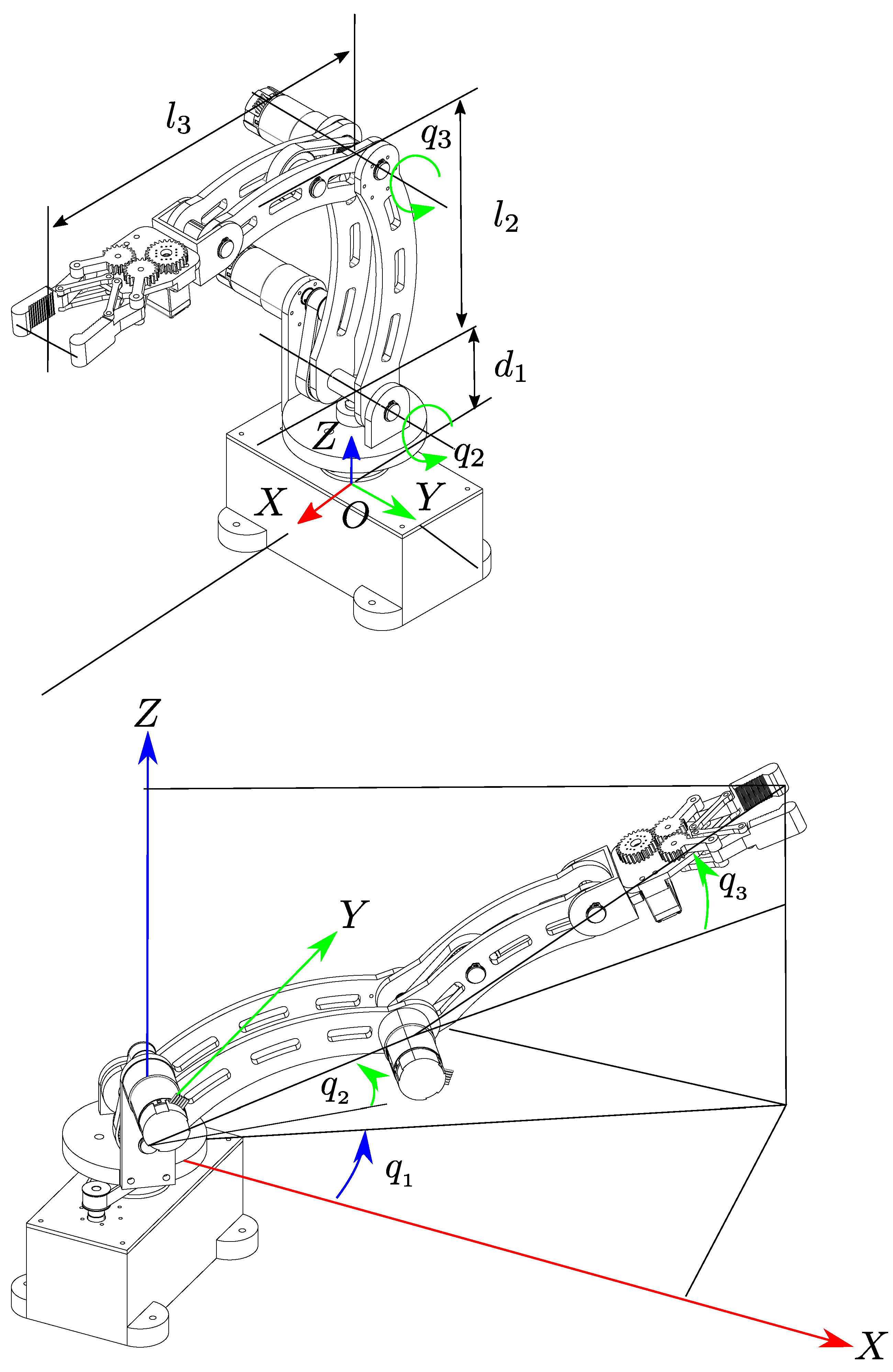
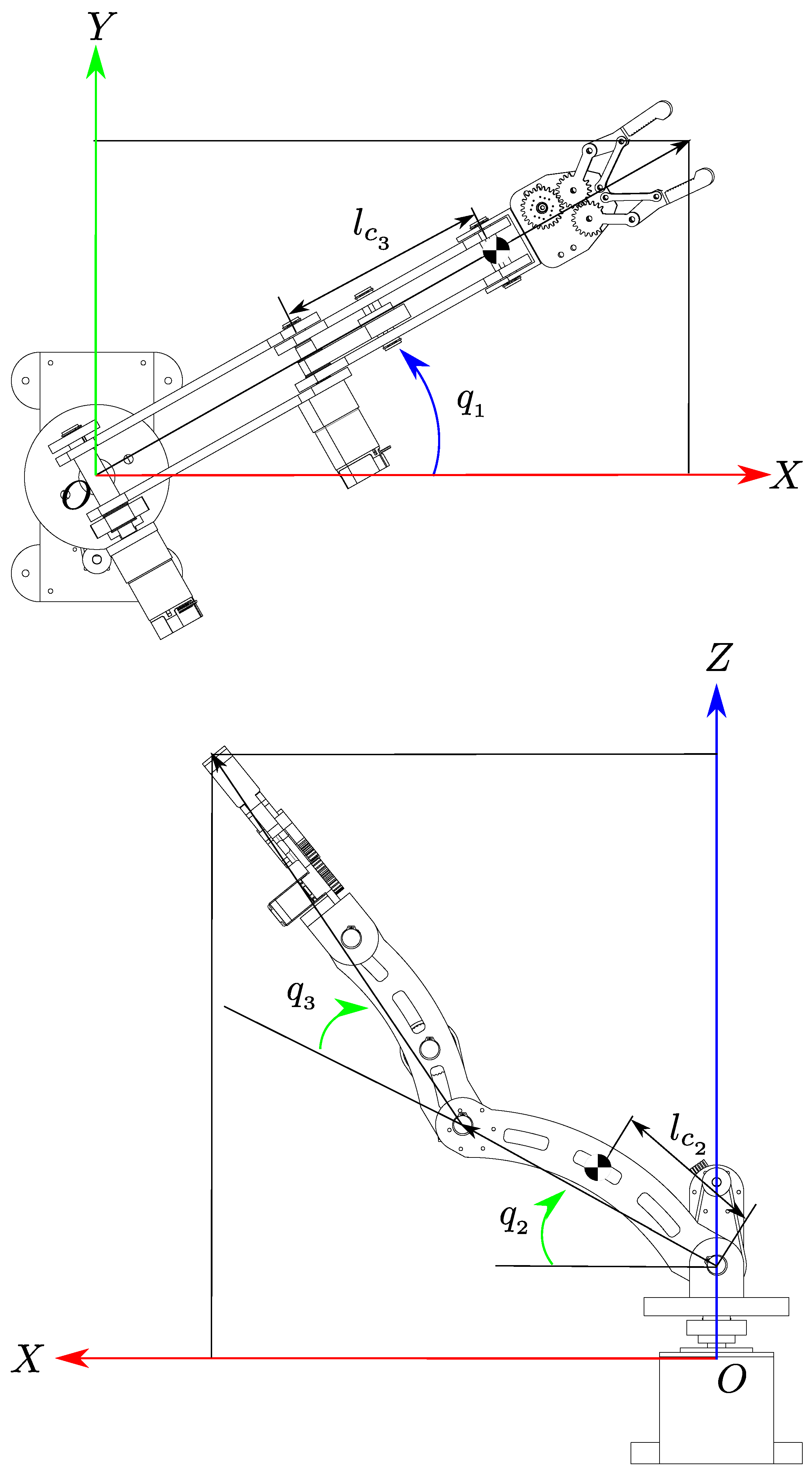
During the simulations, the anthropomorphic manipulator robot with three degrees of freedom previously described is considered, which is characterized by the set of parameters presented in
Table 1.
5.1. Scenario 1: Joint Space Control
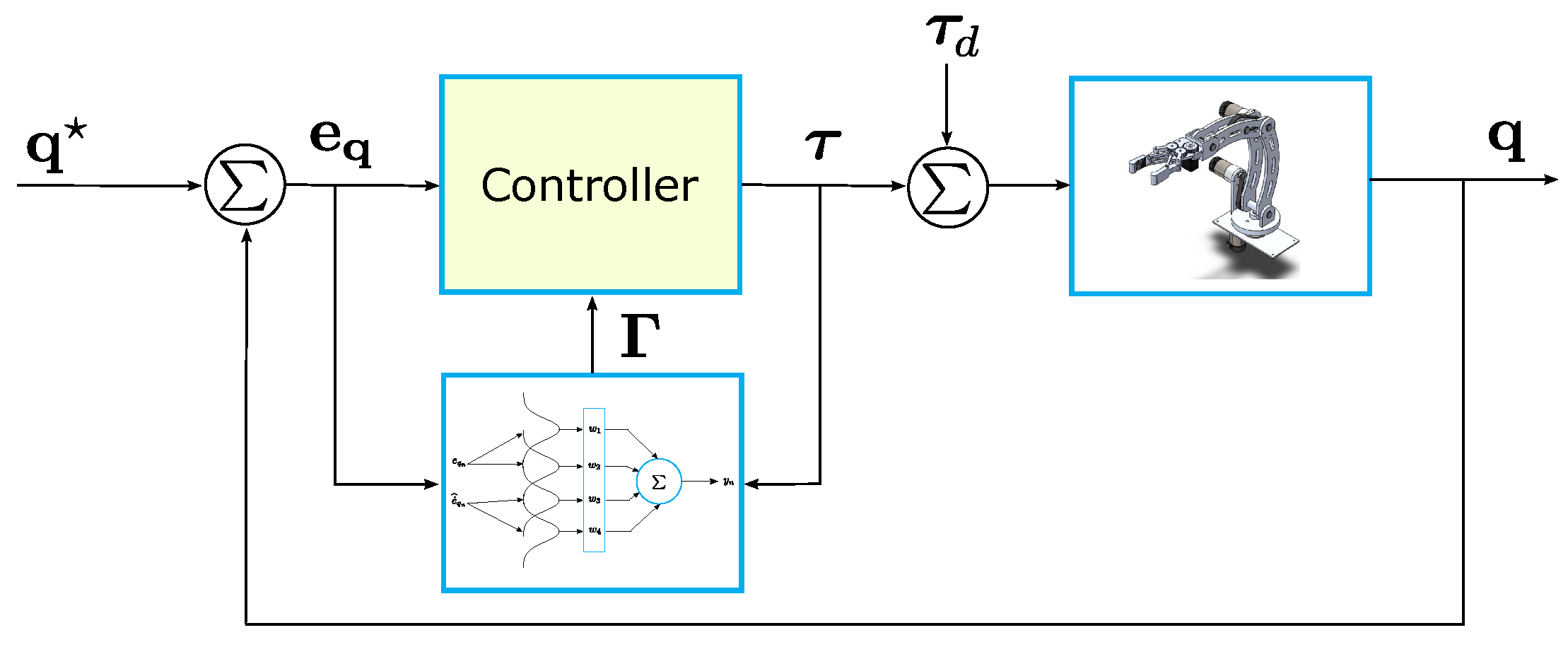
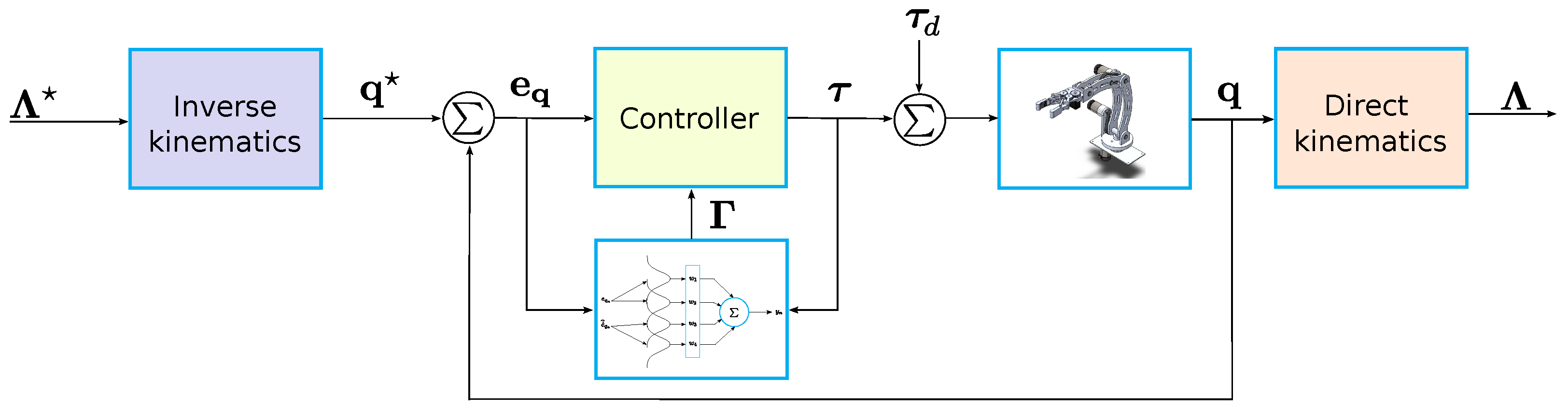
In
Figure 4, it is presented the proposed control scheme for the first scenario. It is evident from this figure that only measurements of the angular positions are required for the adaptive robust controller.
On the other hand, it is relevant to mention that in order to tune a reduced number of control parameters, the following Hurwitz stable polynomial is considered for each degree of freedom:
here
, are the tuning parameters.
Therefore, to ensure closed-loop stability and proper tracking of the planned trajectory, control gains can be selected as follows:
As a result, only three tuning parameters are required instead of six.
During the first simulation scenario, the robot performs motion regulation in the articular space. For smooth transitions between initial and final angular positions, let us introduce the position reference profile in (
26), which is implemented in order to avoid abrupt motion:
where
and
stand for desired initial and final values of angular motion trajectories planned for the manipulator robot. Meantime,
is a Bézier polynomial defined as
with
, and
[
35].
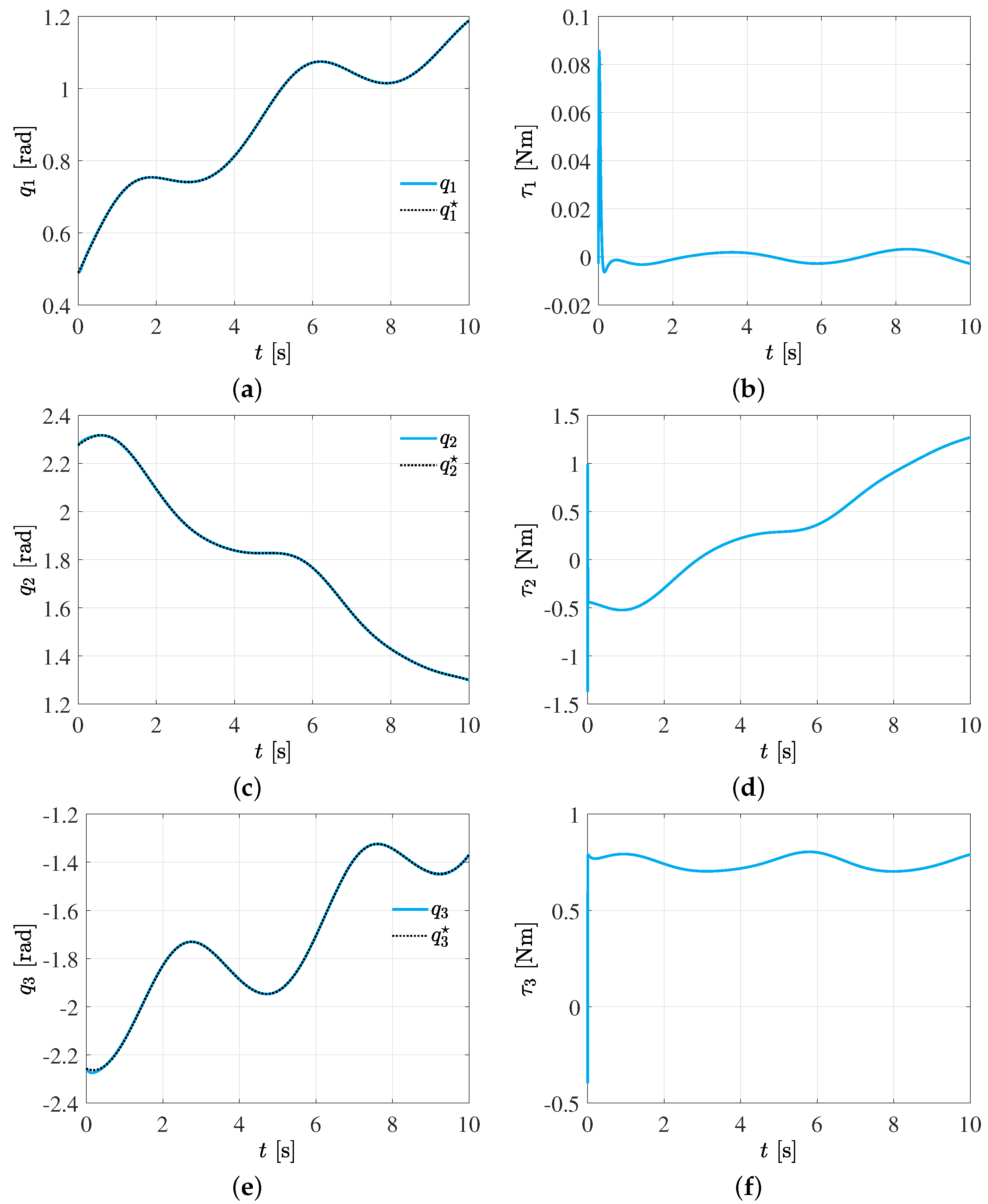
In
Figure 5, it is portrayed the results for the first scenario, where several changes in the trajectory references are commanded for each joint by using the expression in (
27). From the figure, it is evident a suitable tracking of the Bézier motion profiles. The computed driving torques for each joint are soft and reachable. A very common problem in the design of controllers is the saturation of the actuators due to the high magnitude of the required torque signals, something that in this case is solved satisfactorily.
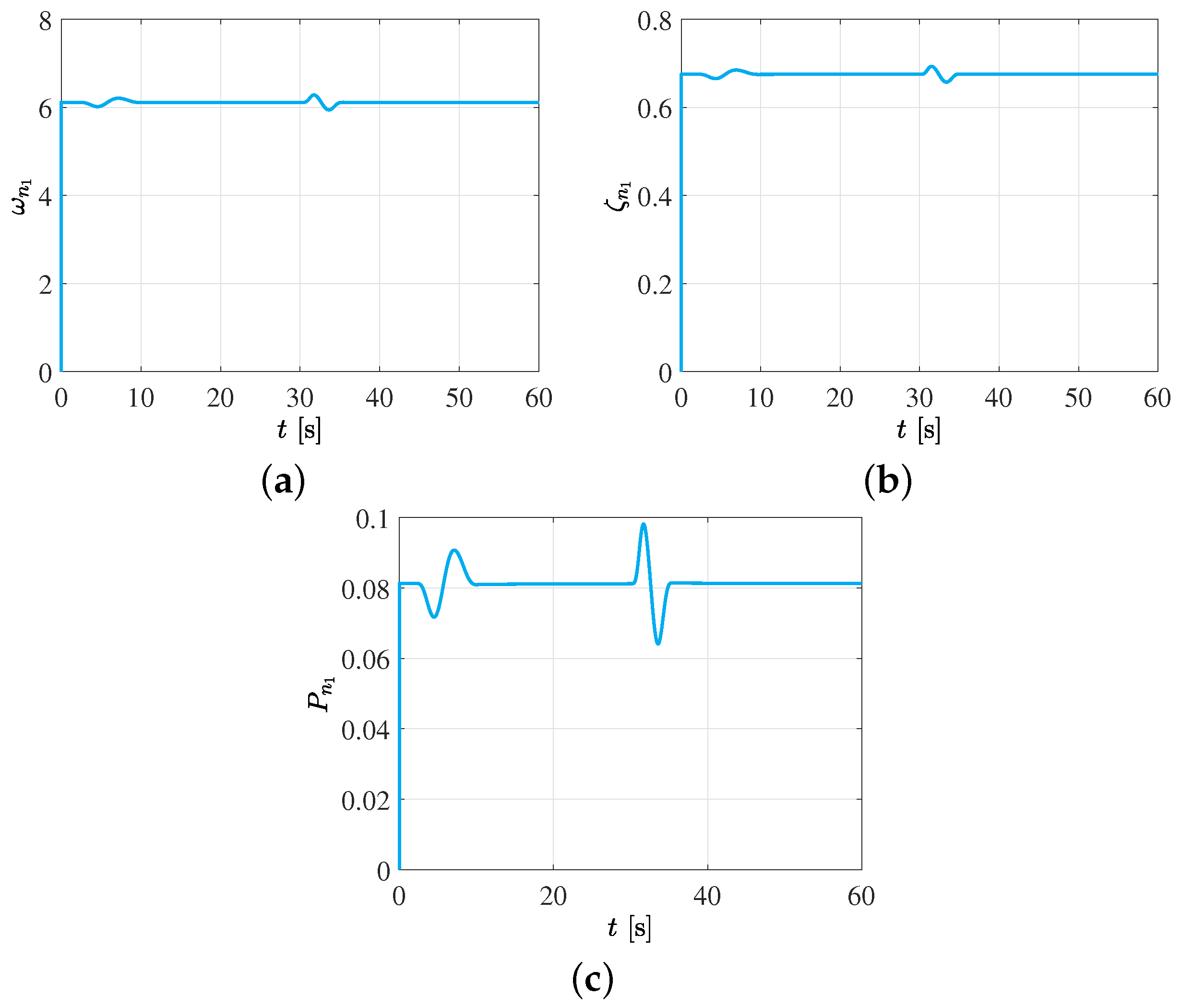
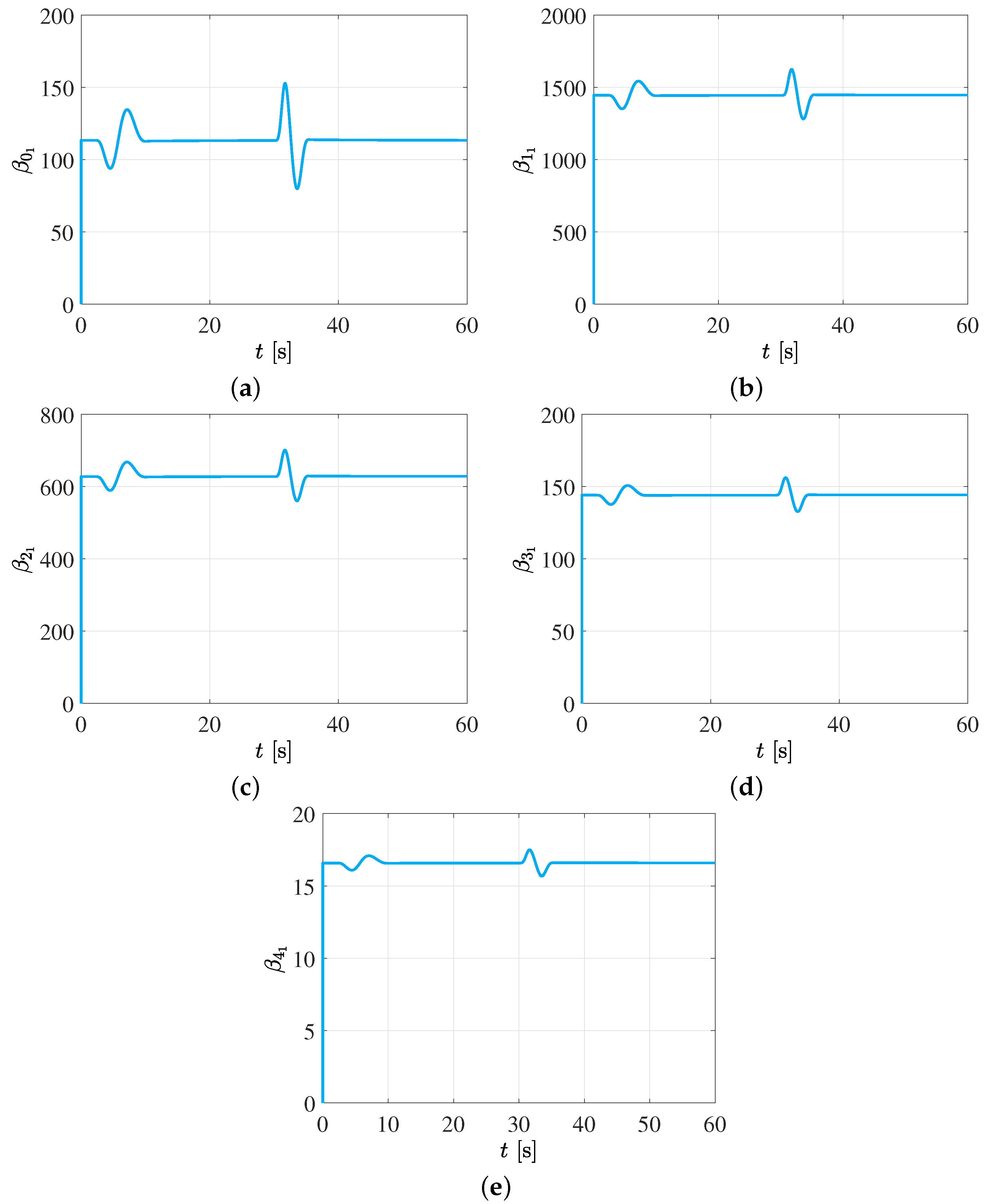
Notwithstanding, the gain values are based on the computation of the
parameters, as shown in
Figure 6 and
Figure 7. In this case of joint movement control, the evolution of the control parameters in the first joint is presented. This is because it is the joint that bears the full weight of the robot, so it would be expected to require a greater magnitude of torque to perform the required movements. However, due to the proposed control scheme, it should be noted that the demanded torque has a very small magnitude, and an excellent follow-up of the programmed joint trajectory is obtained.
Notice from figures that the control gains are dynamic, updated online by the adaptive scheme based on the information of the tracking error dynamics, as shown in
Figure 3.
5.2. Scenario 2: Cartesian Space Control
In the second scenario, the Cartesian space control is considered. Here, the inverse kinematics of the robot is used for computing the joint tracking references. In this experiment, a Cartesian reference trajectory is selected that is typically used in laser applications. The Cartesian position references
are as follows:
where
s, with initial values of
and
are zero and updated each iteration as
.
In the same way as in the previous case, it is only necessary to know the desired angular positions of the robot in order to carry out the trajectory tracking satisfactorily.
Figure 8 presents the block diagram of the proposed control scheme in the Cartesian space.
Figure 9 presents the results of the robot motion control scheme in Cartesian space. It is highlighted that the proposed scheme presents excellent tracking results without the need to provide the speeds and accelerations of the reference to be followed.
Finally,
Figure 10 presents the tracking of the system in the joint space. It can be noted that the system demands very small torque magnitudes to execute the movement of the system. This is a very important aspect to prevent the actuators from saturation due to very high magnitudes of torque.
In scenarios where non-modeled dynamics and/or disturbances occur, the proposed control scheme can present excellent results, so it would be an excellent alternative to be implemented in high-precision manufacturing systems, such as laser cutting and welding robots. This aspect can be better appreciated in the following scenario.
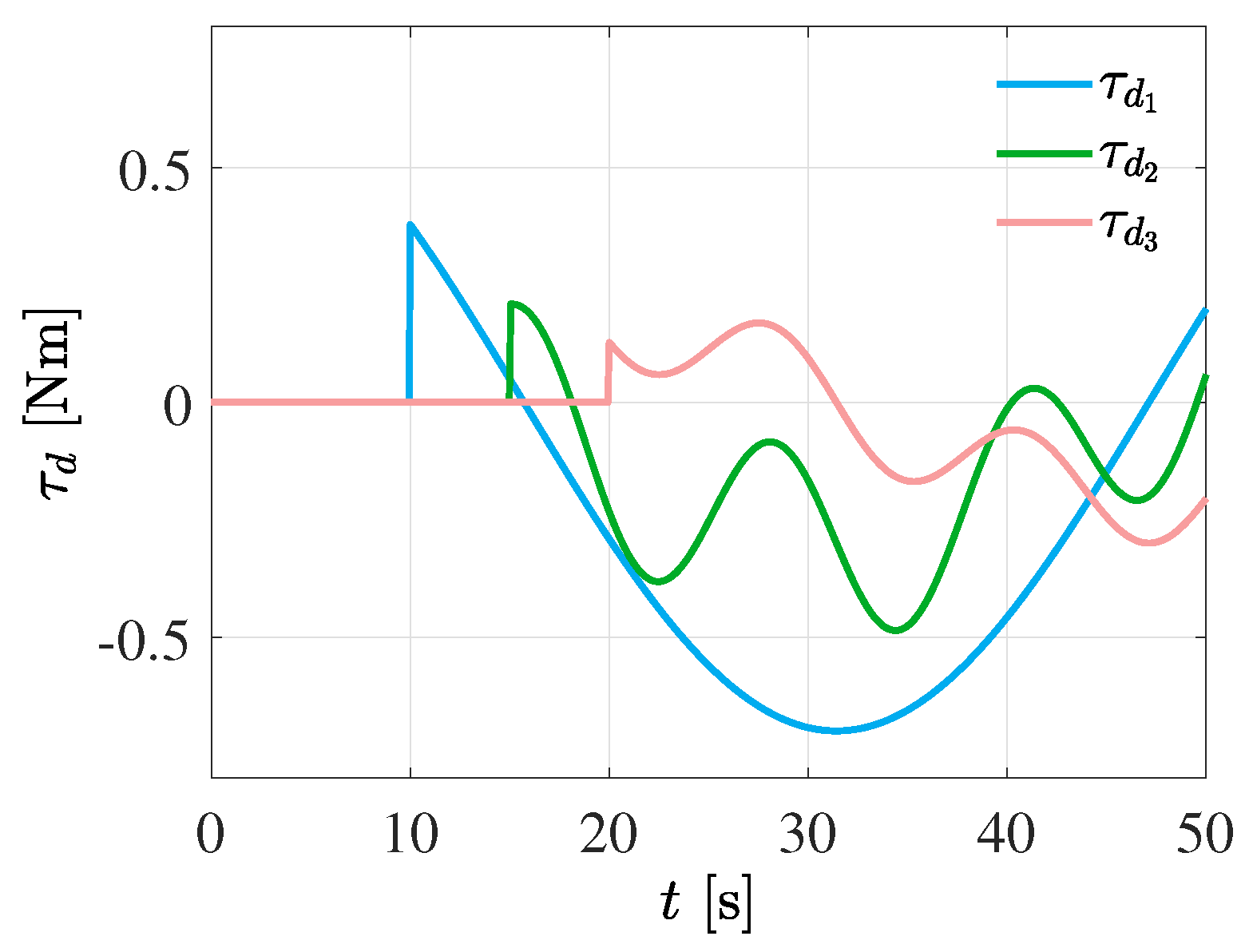
5.3. Scenario 3: Joint Space Robot Motion Subjected to External Vibrating Torques
To demonstrate the effectiveness of the proposed control strategy, the joint space motion control of the manipulator robot subjected to disturbance torques
is presented. Here, the robotic system is intentionally suddenly perturbed with unknown and undesired vibrating torques, portrayed in
Figure 11, which are given as follows:
On the other hand, the model-based PID-like plus a dynamic inversion controller introduced in Equation (
32) is presented for contrasting the capabilities of the introduced motion controller.
where
is a PID-like controller vector given by
and
. Notice from the equations that there exists a high dependence of the mathematical model, which is not desirable in manufacturing applications due to the parameter uncertainty of both the robot and the objects it must manipulate and the presence of the non-modeled dynamics and unknown perturbations, which is the case of frictions and vibrations that can occur during the operation of the system.
In
Figure 12, the unperturbed responses are portrayed for both controllers. It is evident that an acceptable performance is achieved. Notwithstanding, in the presence of undesired and unknown vibration torques, the PID-like controller is unable to stabilize the system or to track the reference, as observed in
Figure 13. Here, it is observed that the motion controller performance is significantly deteriorated when external disturbances are present. Notice that in the proposed motion control scheme, the suitable integration of the Bézier polynomials as the reference motion profiles allows to achieve a superior robot motion performance.
Figure 12 shows the comparison in the robot motion control between a PID-like controller dependent on the mathematical model of the system and the proposed robust adaptive controller without considering external disturbances. In the trajectory tracking with the PID-like controller, it is clearly observed that the system does not reach the desired reference with the requirements that are being demanded, but instead presents a delay, which is not desirable in high-precision manufacturing applications. In contrast, the proposed control strategy reaches the references with smooth and controlled movements, which allows to avoid collisions and damages in cases of application in real environments both for the robot and also for what it is going to manipulate. A system with a PID-like controller in most cases can only work under pre-established conditions.
It is also true that the tuning of the PID controller gains could be improved, but this does not make it less dependent on the model and due to the non-modeled dynamics existing in the robot environment, it would still not work properly if subjected to external disturbances. In addition, a greater number of control parameters than those calculated with the proposed controller would have to be considered.
Figure 13 shows that when the system with the PID controller is subjected to external disturbances, it has a very low performance, so the robot does not have the ability to perform the required trajectory tracking, unlike the proposed control scheme in which it can be seen that no deviation is generated from the paths that the robot is required to follow despite the disturbances that are being input.
Finally, it is considered a last experiment, where parametric uncertainty in matrix
is presented, which might affect considerably the system performance since the controllers introduced in Equations (
19) and (
32) depend on the matrix values. In this fashion, let us consider additional variations of
in the matrix value used for control purposes under the previous scenario conditions. A quantitative comparison of the controllers performance is carried out by using the integral time absolute error (ITAE) and the integral squared control input (ISCI) indexes, which are associated with the tracking error and control input efforts for each joint as follows:
where
e and
u stand for the tracking errors and control inputs for each degree of freedom. From
Table 2, it is corroborated a better performance of the proposed control scheme for the robotic manipulator systems, even when less information is required from the physical system in contrast with the PID-like controller. Moreover, in
Table 3 and
Table 4, it is summarized the performance indexes when there exist variations in the matrix values used by the control schemes, which are
of the nominal real matrix value. Furthermore, from Equations (
19) and (
32), it is evident that when uncertainty is also considered in the Coriolis and centripetal forces matrix
, the performance of the PID-like controller is further deteriorated. On the other hand, the low system model information dependence of the proposed adaptive robust motion tracking controller allows the system to portray a better performance when the system is subjected to parametric uncertainty, non-modeled dynamics and unknown disturbing vibrating load torques. Overall, the presented results demonstrate that the proposal is a feasible and robust alternative to achieve an acceptable performance in motion tracking control for robotic manipulator systems.


 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}