
Experimental and Numerical Study on Incident Shock Wave/Boundary Layer Interaction Control


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Experimental Setup
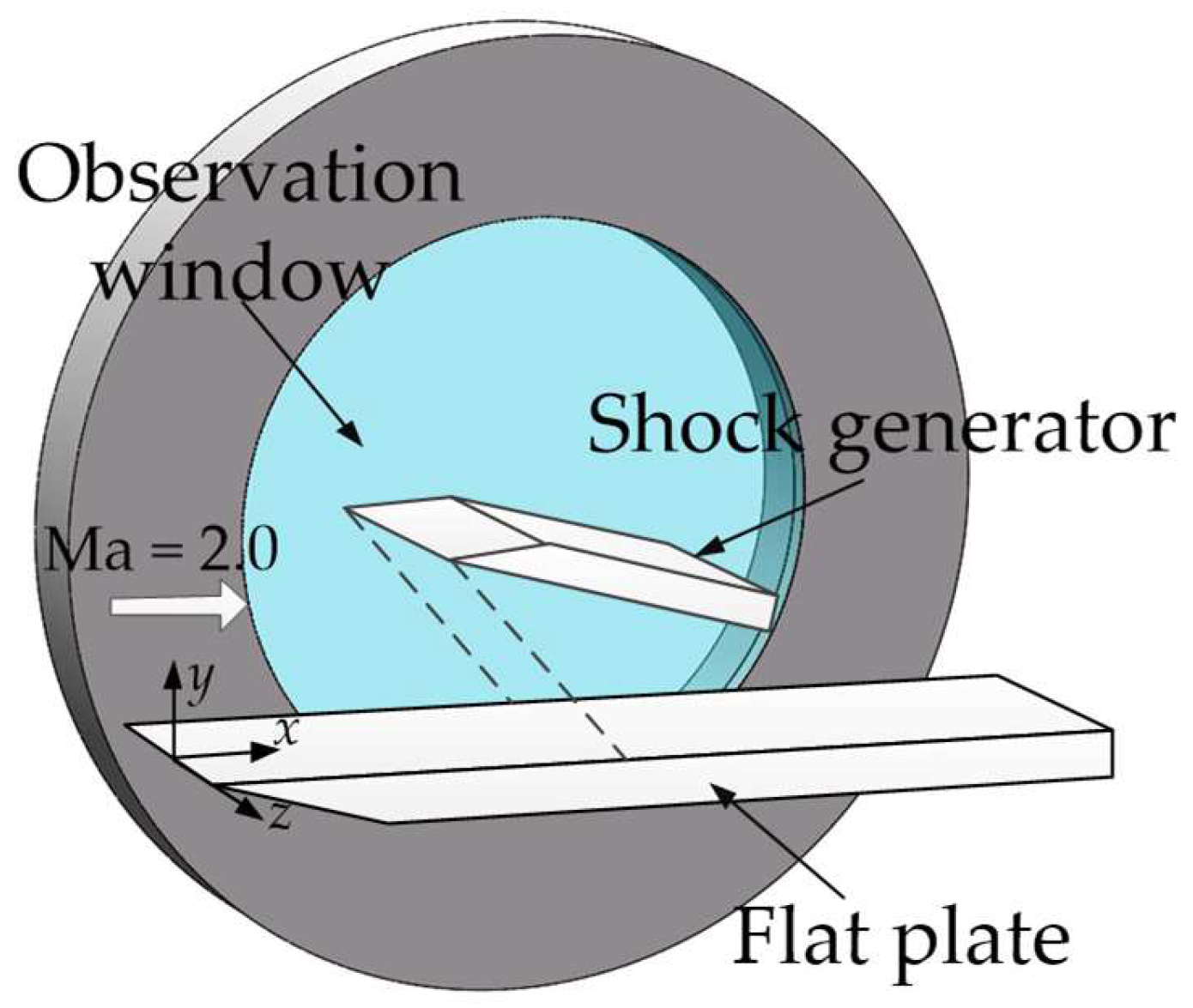
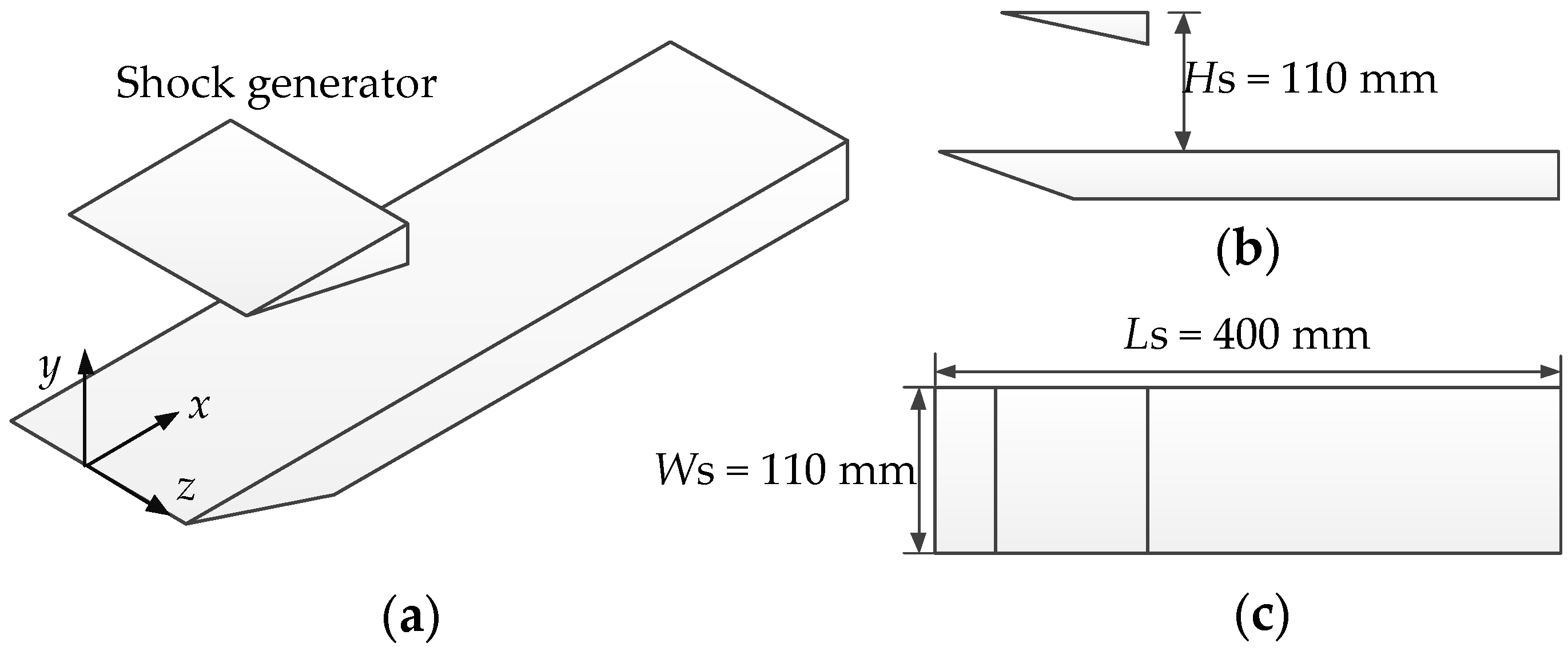
2.1. Wind Tunnel and Experimental Model
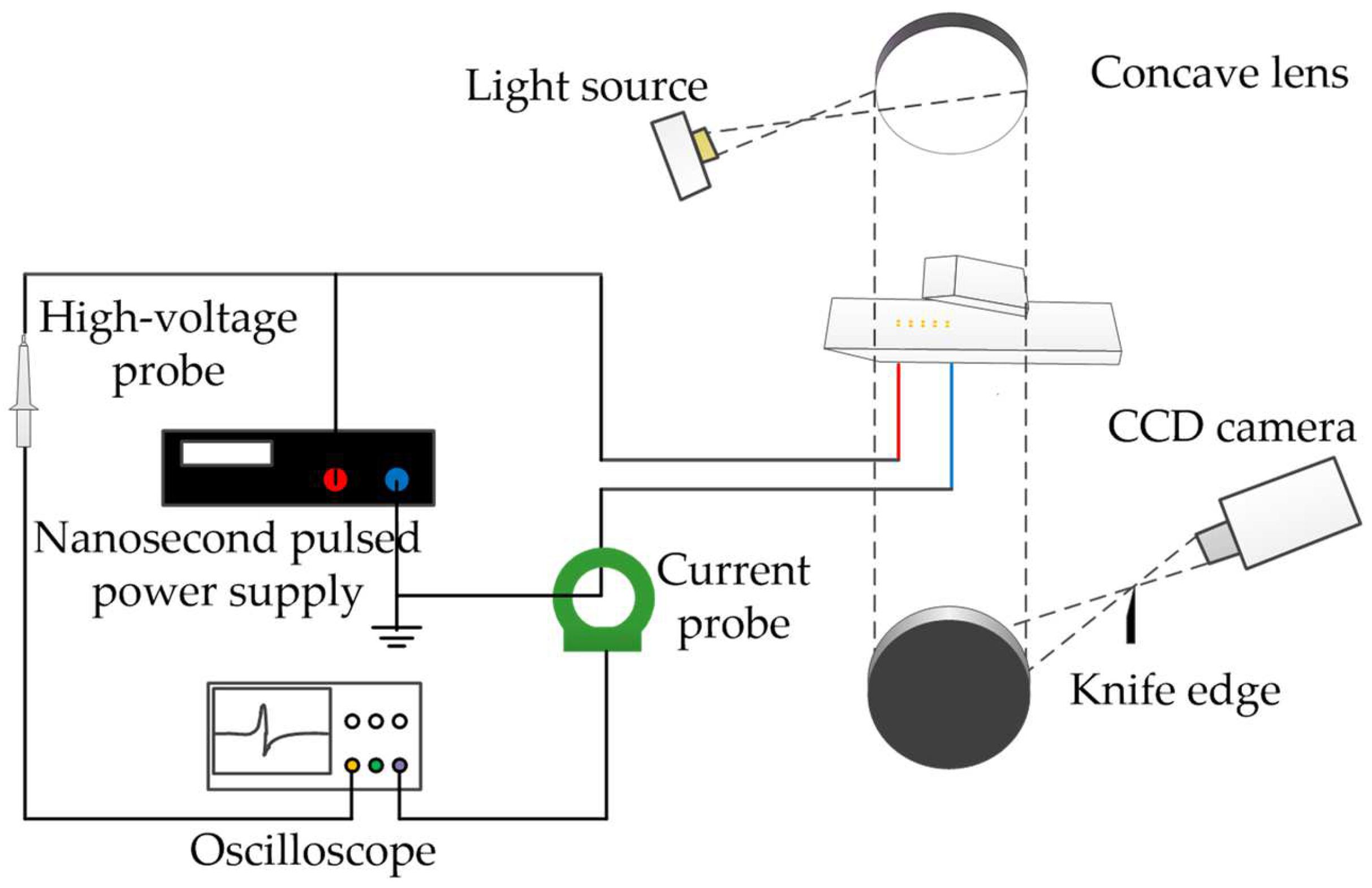
2.2. Plasma Actuation System and High-Speed Schlieren System
3. Experimental Results and Discussion
4. Numerical Results and Discussion
4.1. Calculation Method
4.1.1. Physical Model
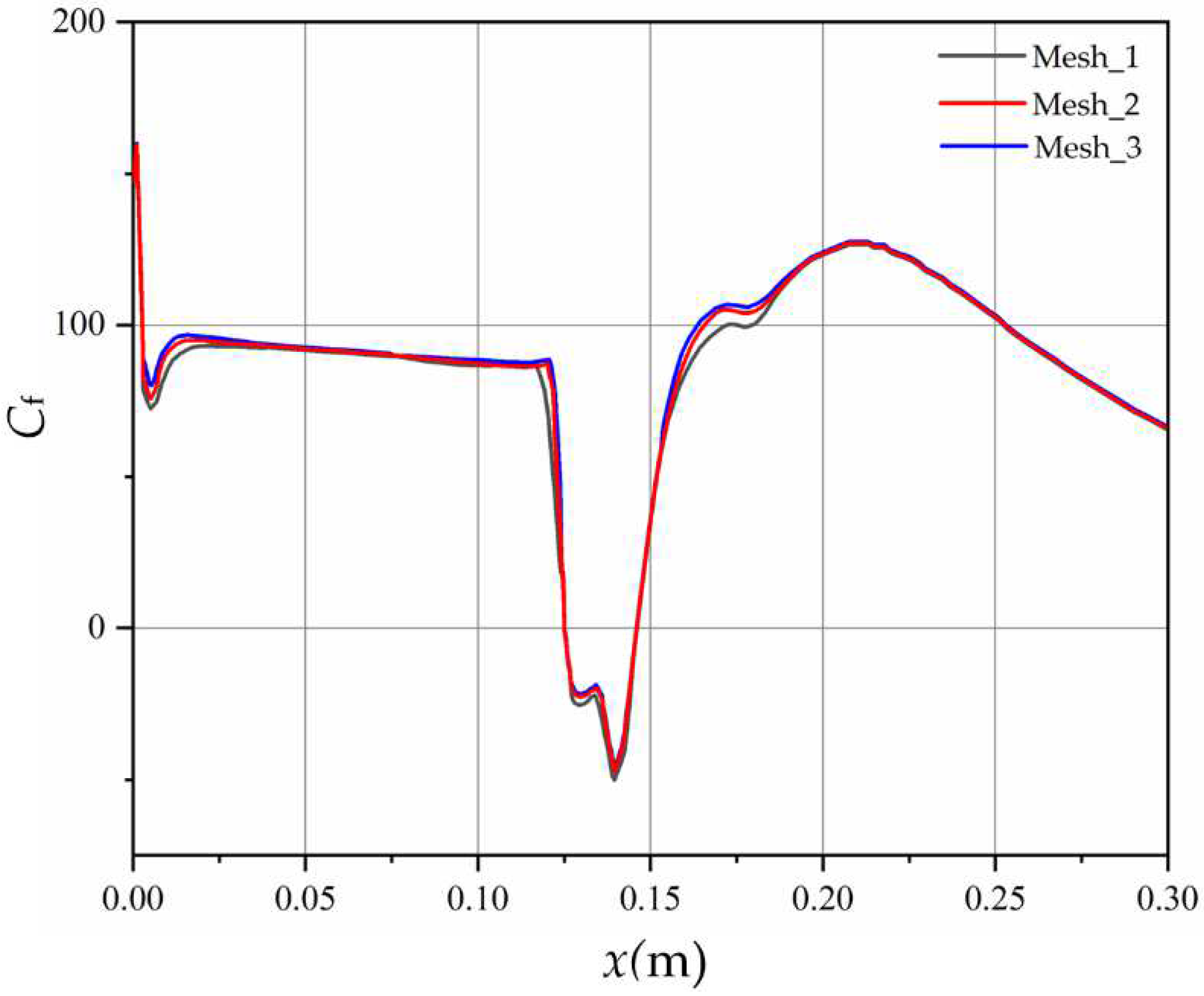
4.1.2. Computational Grid and DES
4.1.3. Phenomenological Model of Plasma Actuation
4.2. Simulation Result and Disscussion
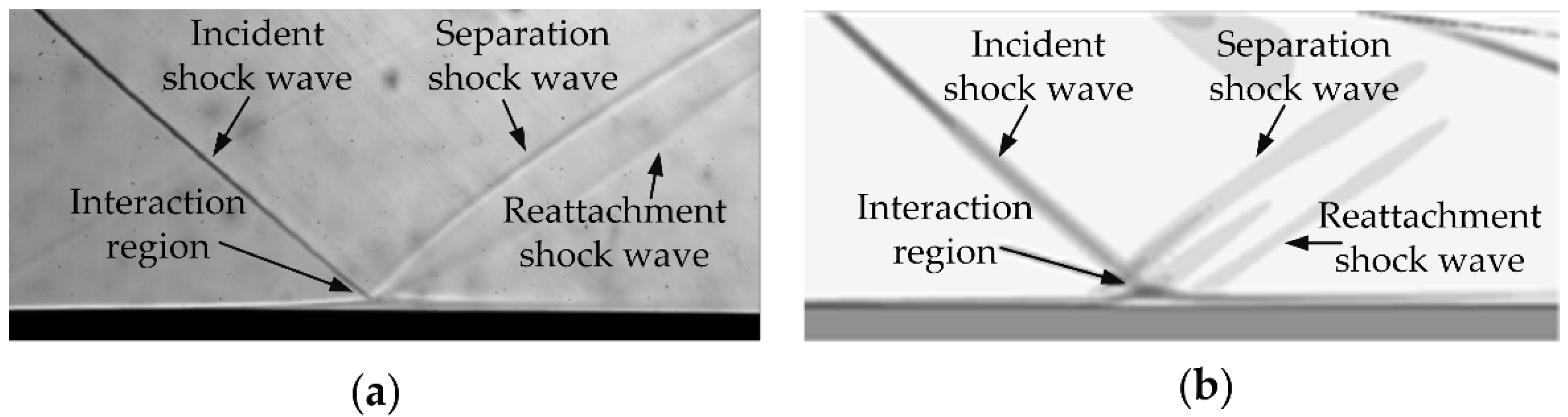
4.2.1. Base Flow Field
4.2.2. Single-Channel Actuation Flow Field
4.2.3. Array Actuation Flow Field
5. Conclusions
- (1)
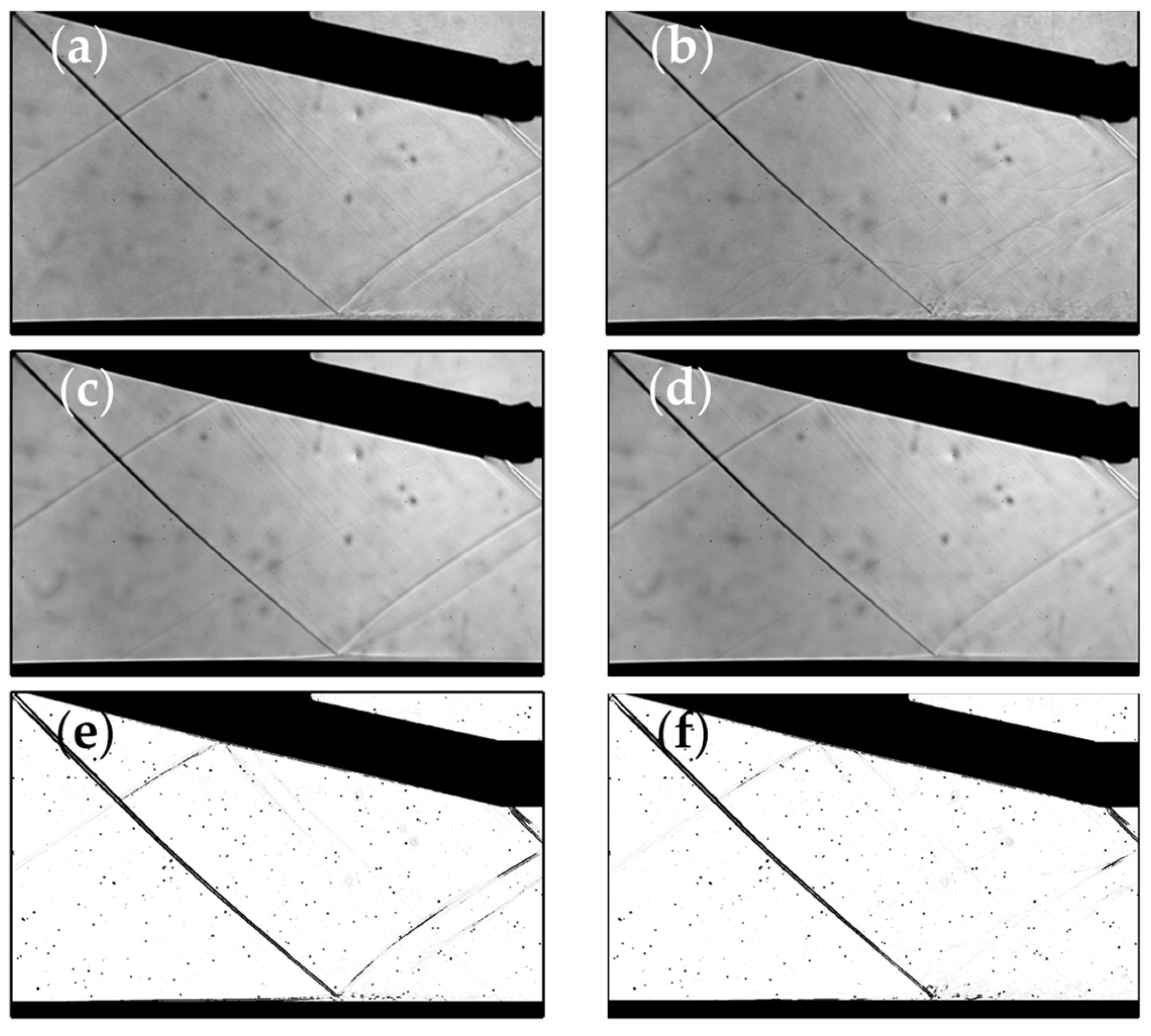
- In the experimental study, the intensity of single-channel actuation was relatively weak. Comparatively, the five-channel array actuation effectively weakened the intensity of the separation shock wave and the reattached shock wave. The incident shock wave did not change significantly under these two forms of actuation;
- (2)
- The numerical simulation results of the base flow field showed that the separation zone of the ISWBLI was crescent shaped, and the length of the separation zone at the middle cross section was longer than that at both sides. The length of the separation zone at the central cross section was about 20 mm; however, the separation zone almost entirely disappeared at the edge of the plate;
- (3)
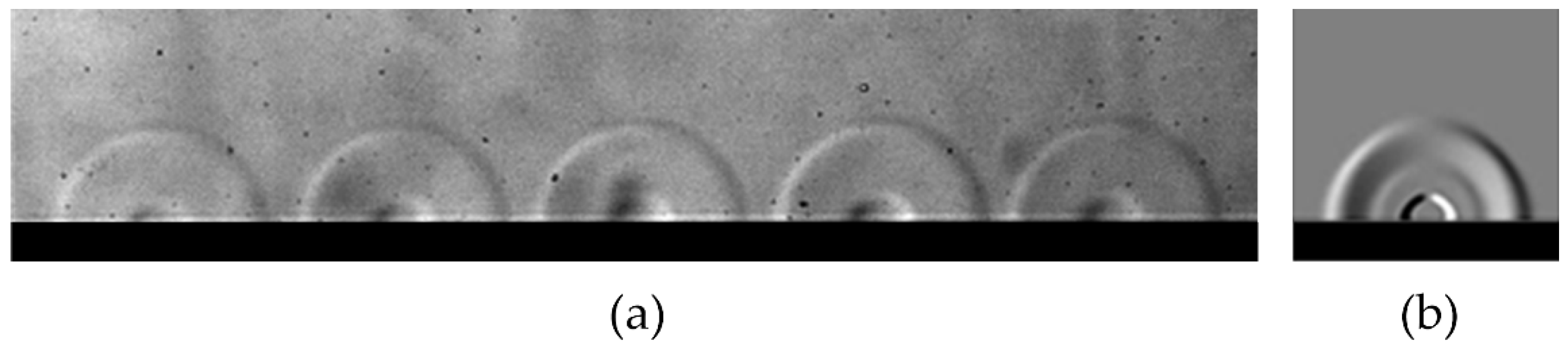
- The transient simulation results of the single-channel actuation showed that the pulsed arc discharge plasma actuation produced two disturbance forms in the supersonic flow field: the precursor blast wave and the thermal gas bulb. The pressure and temperature contours showed that the disturbance of the thermal gas bulb had a significant effect on the ISWBLI;
- (4)
- Single-channel actuation can only just achieve a control effect over ISWBLI, as there was no significant change in the shock wave structure of the ISWBLI flow field with or without actuation. The length of the separation zone at the central cross section of the plate increased by 3 mm, and the start of separation moved forward by about 2 mm. There was no significant change in the separation zone on both sides of the plate;
- (5)
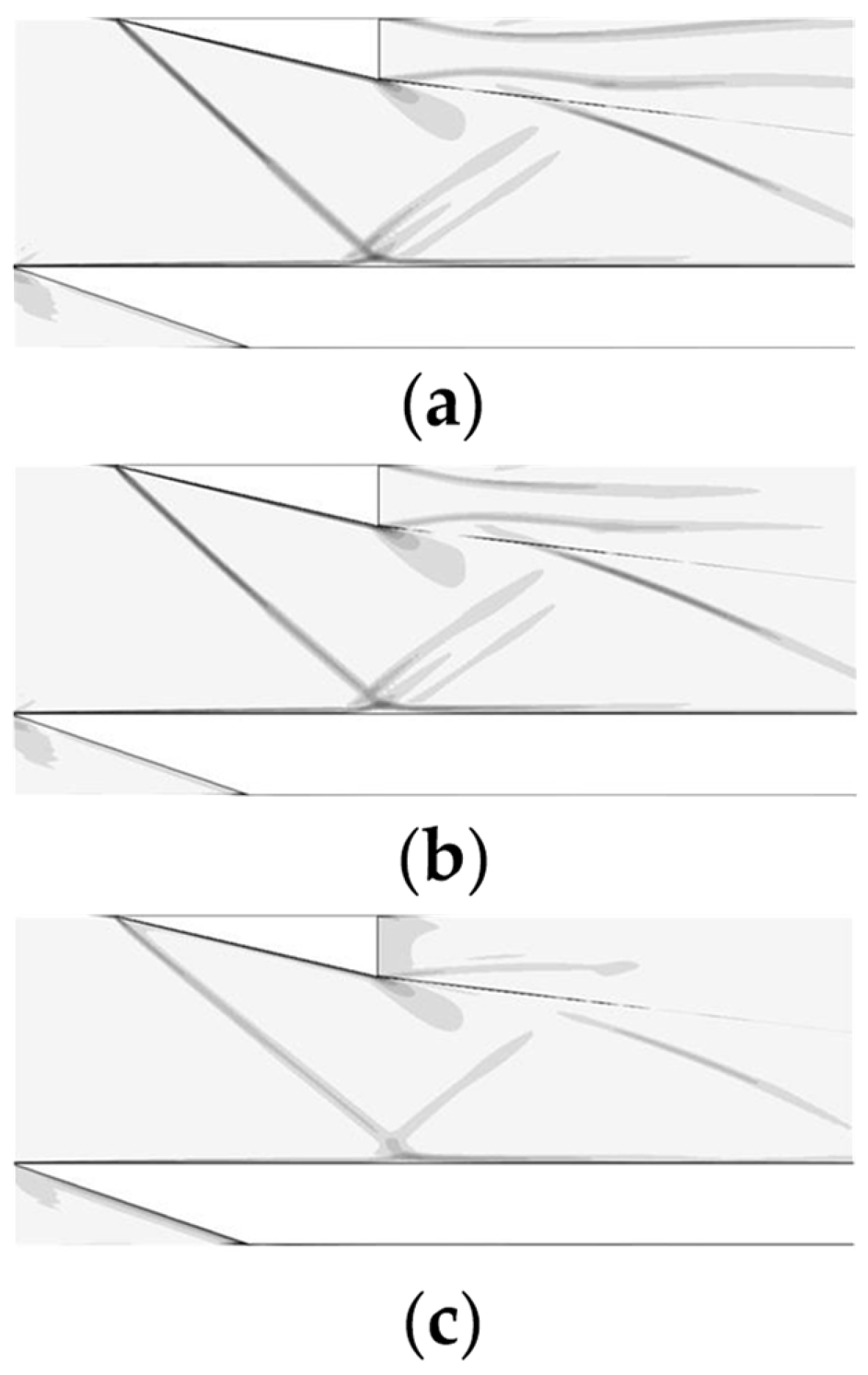
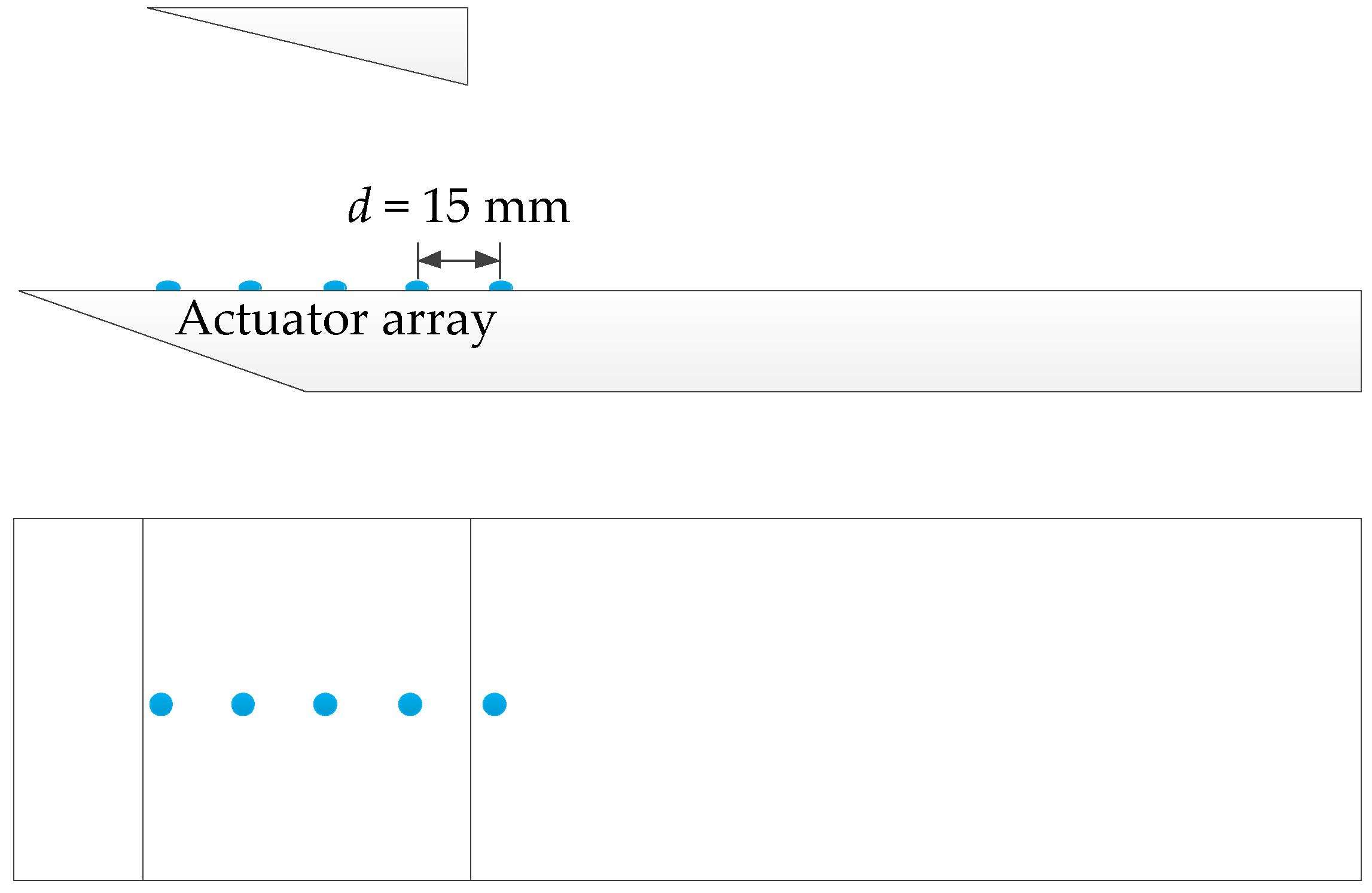
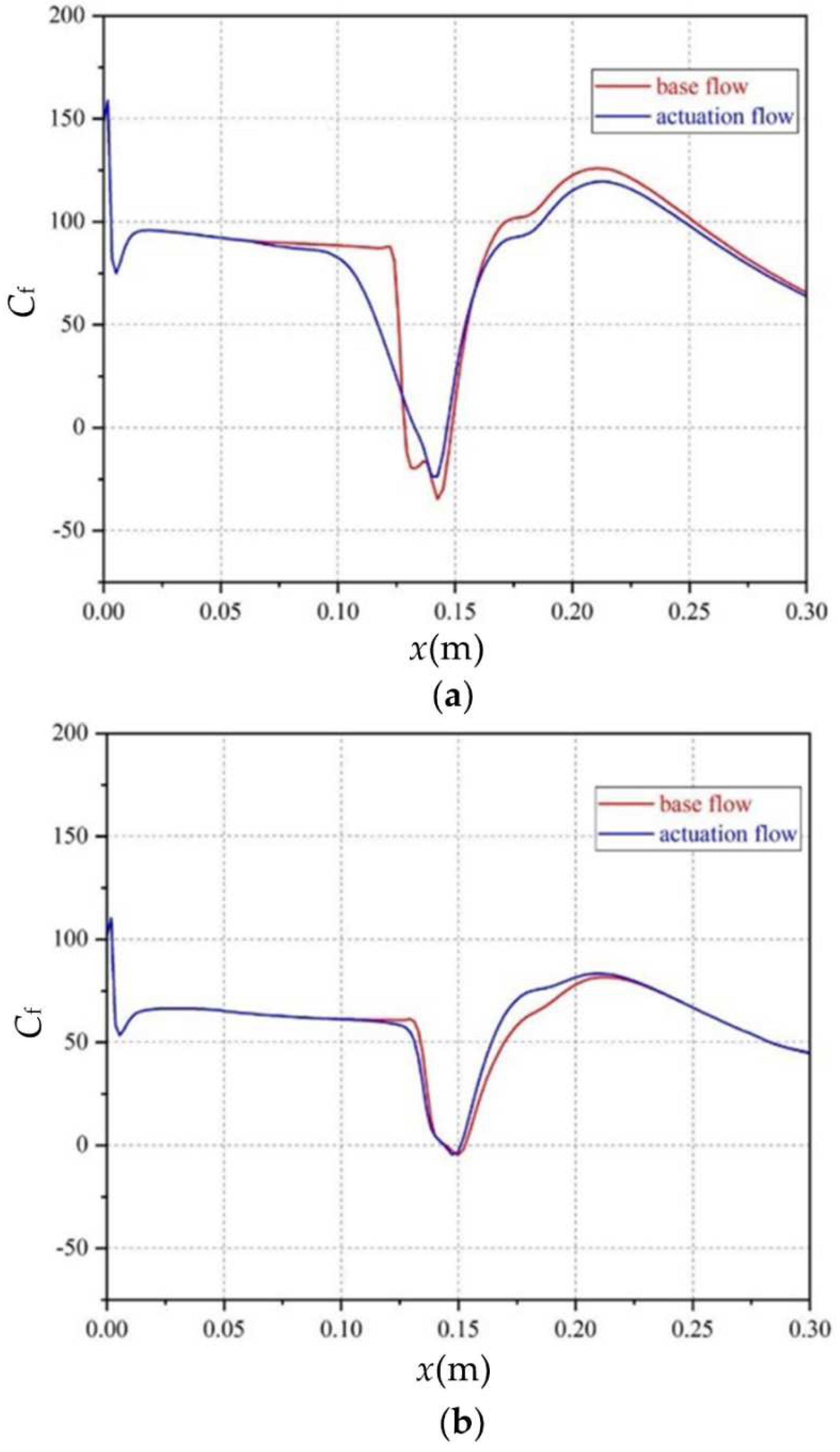
- The five-channel pulsed arc discharge plasma array actuation could effectively weaken the intensity of the separation shock wave. After the application of actuation, the separation shock wave disappeared in the time-average flow field, and the angle of the reattached shock wave decreased from 34.6° to 30.5°. The application of the array actuation could change the shape of the separation zone; the start of separation moved forward by about 19 mm; and the length increased by 30 mm at the central cross section. It was also observed that the length of the separation zone on both sides was reduced. Furthermore, the array actuation could effectively mitigate the spanwise influence zone in the separation zone.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yamamoto, J.; Kojima, Y.; Kameda, M.; Watanabe, Y.; Hashimoto, A.; Aoyama, T. Prediction of the onset of supersonic inlet buzz. Aerosp. Sci. Technol. 2020, 96, 105523. [Google Scholar] [CrossRef]
- Ferrero, A. Control of a Supersonic Inlet in Off-Design Conditions with Plasma Actuators and Bleed. Aerospace 2020, 7, 32. [Google Scholar] [CrossRef] [Green Version]
- Titchener, N.; Babinsky, H. Shock wave/boundary-layer interaction control using a combination of vortex generators and bleed. AIAA J. 2013, 51, 1221–1233. [Google Scholar] [CrossRef]
- Trapier, S.; Duveau, P.; Deck, S. Experimental study of supersonic inlet buzz. AIAA J. 2006, 44, 2354–2365. [Google Scholar] [CrossRef]
- Chen, H.; Tan, H.J.; Zhang, Q.F.; Zhang, Y. Throttling Process and Buzz Mechanism of a Supersonic Inlet at Overspeed Mode. AIAA J. 2018, 56, 1–12. [Google Scholar] [CrossRef]
- Herrmann, C.; Koschel, W. Experimental investigation of the internal compression inside a hypersonic intake. In Proceedings of the 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Indianapolis, IN, USA, 7–10 July 2002; p. 4130. [Google Scholar]
- Zhang, Y.; Tan, H.; Du, M.; Wang, D.P. Control of shock/boundary-layer interaction for hypersonic inlets by highly swept microramps. J. Propuls. Power 2015, 31, 133–143. [Google Scholar] [CrossRef]
- Xie, W.Z.; Wu, Z.M.; Yu, A.Y.; Guo, S. Control of severe shock-wave/boundary-layer interactions in hypersonic inlets. J. Propuls. Power 2018, 34, 614–623. [Google Scholar] [CrossRef]
- Babinsky, H.; Ogawa, H. SBLI control for wings and inlets. Shock Waves 2008, 18, 89–96. [Google Scholar] [CrossRef]
- Gruhn, P.; Gülhan, A. Experimental investigation of a hypersonic inlet with and without sidewall compression. J. Propuls. Power 2011, 27, 718–729. [Google Scholar] [CrossRef]
- Häberle, J.; Gülhan, A. Experimental investigation of a two-dimensional and a three-dimensional scramjet inlet at Mach 7. J. Propuls. Power 2008, 24, 1023–1034. [Google Scholar] [CrossRef]
- Zhang, Y.; Tan, H.; Sun, S.; Rao, C.Y. Control of cowl shock/boundary-layer interaction in hypersonic inlets by bump. AIAA J. 2015, 53, 3492–3496. [Google Scholar] [CrossRef]
- Vignesh Ram, P.S.; Das, S.; Kim, H.D. Influence of vortex generator on cylindrical protrusion aerodynamics at various Mach numbers. Aerosp. Sci. Technol. 2016, 58, 267–274. [Google Scholar]
- Titchener, N.; Babinsky, H.; Loth, E. The effects of various vortex generator configurations on a normal shock wave/boundary layer interaction. In Proceedings of the 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Grapevine, TX, USA, 7–10 January 2013; p. 18. [Google Scholar]
- Huang, J.B.; Xiao, Z.X.; Fu, S.; Zhang, M. Study of control effects of vortex generators on a supercritical wing. Sci. China Technol. Sci. 2010, 53, 2038–2048. [Google Scholar] [CrossRef]
- Yan, Y.; Chen, L.; Li, Q.; Liu, C. Numerical study of micro-ramp vortex generator for supersonic ramp flow control at Mach 2.5. Shock. Waves 2017, 27, 79–96. [Google Scholar] [CrossRef]
- Saad, M.R.; Zare-Behtash, H.; Che-Idris, A.; Kontis, K. Micro-ramps for hypersonic flow control. Micromachines 2012, 3, 364–378. [Google Scholar] [CrossRef]
- Grébert, A.; Bodart, J.; Jamme, S.; Joly, L. Simulations of shock wave/turbulent boundary layer interaction with upstream micro vortex generators. Int. J. Heat Fluid Flow 2018, 72, 73–85. [Google Scholar] [CrossRef] [Green Version]
- Bagheri, H.; Mirjalily, S.A.A.; Oloomi, S.A.A.; Salimpour, M.R. Effects of micro-vortex generators on shock wave structure in a low aspect ratio duct, numerical investigation. Acta. Astronaut. 2021, 178, 616–624. [Google Scholar] [CrossRef]
- Panaras, A.G.; Lu, F.K. Micro-vortex generators for shock wave/boundary layer interactions. Prog. Aerosp. Sci. 2015, 74, 16–47. [Google Scholar] [CrossRef]
- Oorebeek, J.; Nolan, W.; Babinsky, H. Comparison of bleed and micro-vortex generator effects on supersonic boundary-layers. In Proceedings of the 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012; p. 45. [Google Scholar]
- Wang, J.J.; Choi, K.S.; Feng, L.H.; Jukes, T.N.; Whalley, R.D. Recent developments in DBD plasma flow control. Prog. Aerosp. Sci. 2013, 62, 52–78. [Google Scholar] [CrossRef]
- Moreau, E. Airflow control by non-thermal plasma actuators. J. Phys. D Appl. Phys. 2007, 40, 605. [Google Scholar] [CrossRef]
- Choi, K.S.; Jukes, T.; Whalley, R. Turbulent boundary-layer control with plasma actuators. Philos. Trans. Royal Soc. A 2011, 369, 1443–1458. [Google Scholar] [CrossRef] [PubMed]
- Zong, H.; Chiatto, M.; Kotsonis, M.; De Luca, L. Plasma synthetic jet actuators for active flow control. Actuators 2018, 7, 77. [Google Scholar] [CrossRef] [Green Version]
- Narayanaswamy, V.; Raja, L.L.; Clemens, N.T. Control of a shock/boundary-layer interaction by using a pulsed-plasma jet actuator. AIAA J. 2012, 50, 246–249. [Google Scholar] [CrossRef]
- Narayanaswamy, V.; Raja, L.L.; Clemens, N.T. Control of unsteadiness of a shock wave/turbulent boundary layer interaction by using a pulsed-plasma-jet actuator. Phys. Fluids 2012, 24, 076101. [Google Scholar] [CrossRef] [Green Version]
- Kara, K.; Kim, D.; Morris, P.J. Flow-separation control using sweeping jet actuator. AIAA J. 2018, 56, 4604–4613. [Google Scholar] [CrossRef]
- Kinefuchi, K.; Starikovskiy, A.Y.; Miles, R.B. Numerical investigation of nanosecond pulsed plasma actuators for control of shock-wave/boundary-layer separation. Phys. Fluids 2018, 30, 106105. [Google Scholar] [CrossRef] [Green Version]
- Yan, H.; Liu, F.; Xu, J.; Xue, Y. Study of oblique shock wave control by surface arc discharge plasma. AIAA J. 2018, 56, 532–541. [Google Scholar] [CrossRef]
- Tang, M.; Wu, Y.; Guo, S.; Sun, Z.; Luo, Z. Effect of the streamwise pulsed arc discharge array on shock wave/boundary layer interaction control. Phys. Fluids 2020, 32, 076104. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Luo, Y.; Liang, H.; Guo, S.; Yang, H. Experimental and Numerical Study on Incident Shock Wave/Boundary Layer Interaction Control. Actuators 2022, 11, 148. https://doi.org/10.3390/act11060148
Zhang C, Luo Y, Liang H, Guo S, Yang H. Experimental and Numerical Study on Incident Shock Wave/Boundary Layer Interaction Control. Actuators. 2022; 11(6):148. https://doi.org/10.3390/act11060148
Chicago/Turabian StyleZhang, Chuanbiao, Yanhao Luo, Hua Liang, Shanguang Guo, and Hesen Yang. 2022. "Experimental and Numerical Study on Incident Shock Wave/Boundary Layer Interaction Control" Actuators 11, no. 6: 148. https://doi.org/10.3390/act11060148
APA StyleZhang, C., Luo, Y., Liang, H., Guo, S., & Yang, H. (2022). Experimental and Numerical Study on Incident Shock Wave/Boundary Layer Interaction Control. Actuators, 11(6), 148. https://doi.org/10.3390/act11060148