
Flexible Control Strategy for Upper-Limb Rehabilitation Exoskeleton Based on Virtual Spring Damper Hypothesis


Abstract
:1. Introduction
- (1)
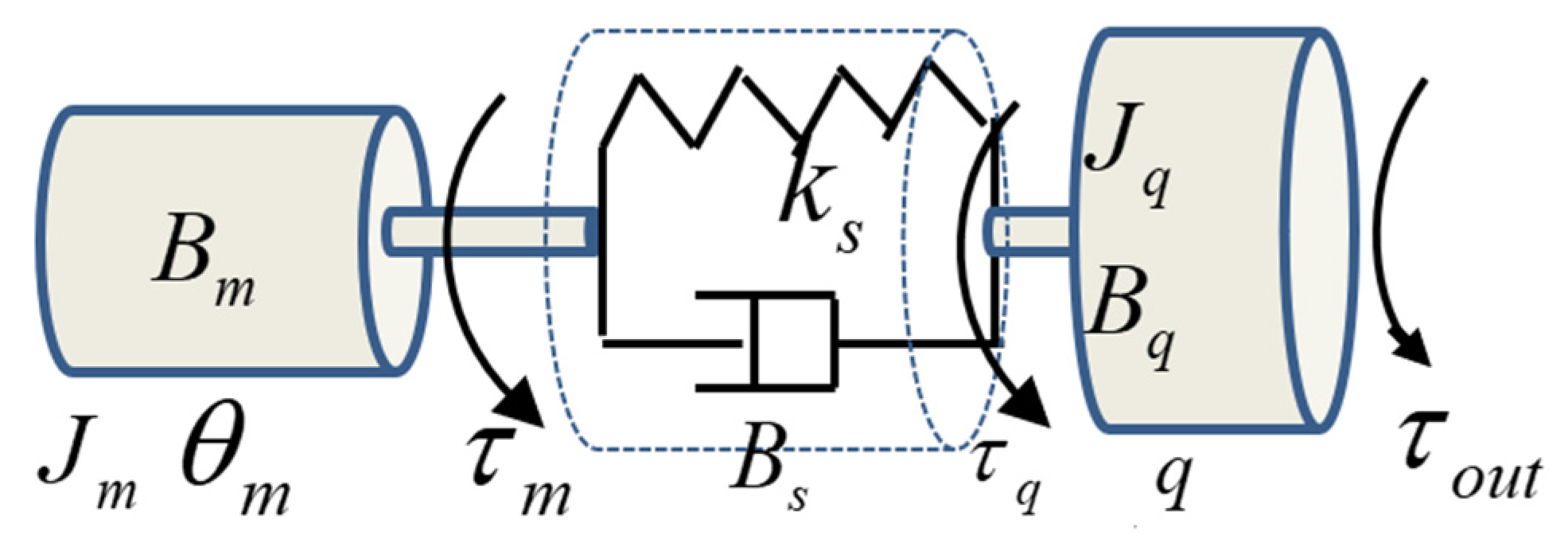
- We propose an innovative concept and method of “virtual softening control strategy” for the rigid joint. It is assumed that a virtual spring damper (VSD) module is installed after the joint motor. By designing the control signal of the motor, the torque output of the joint actuator is softened so that it has the typical characteristics of elasticity and variable stiffness.
- (2)
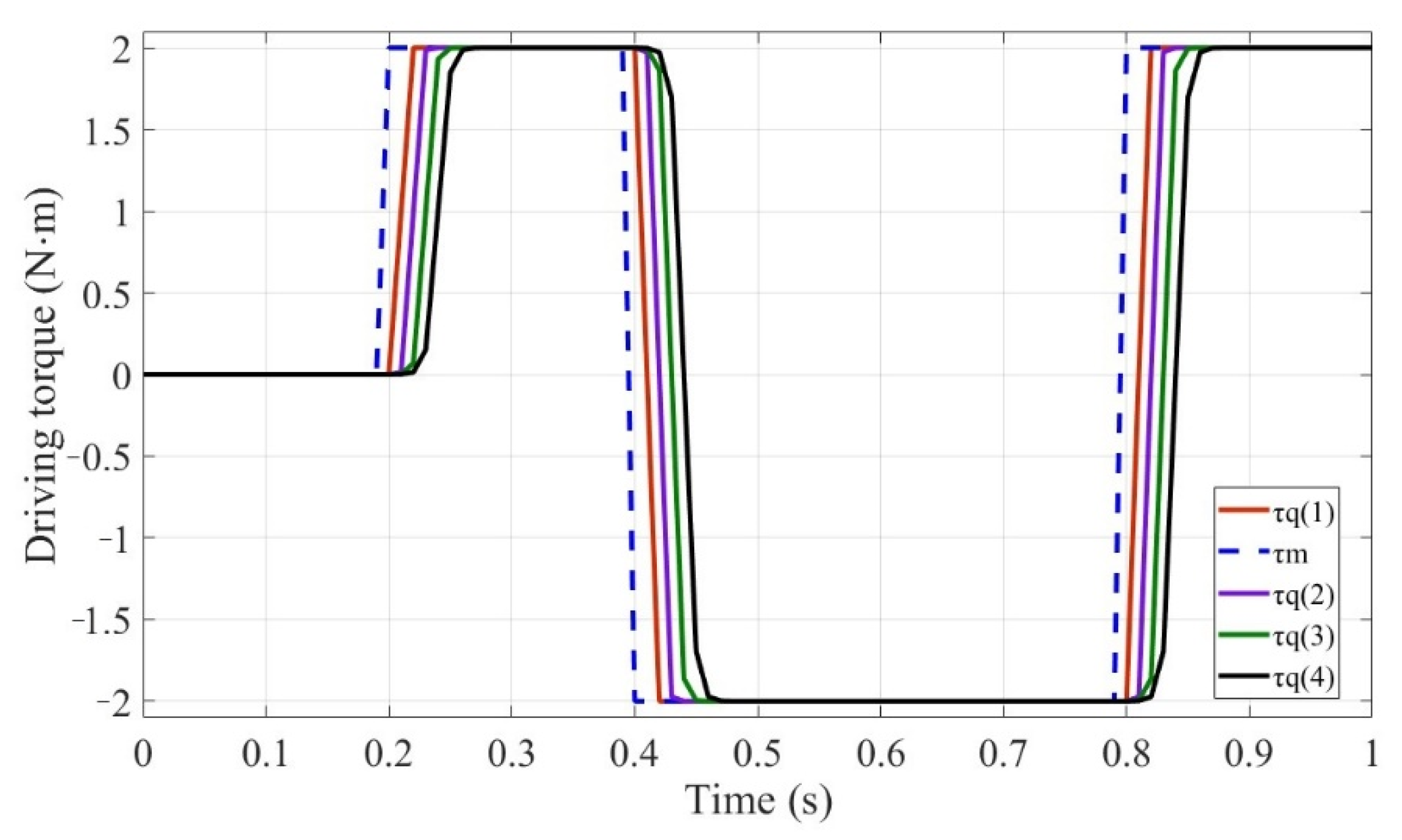
- In this paper, the torque virtual tracking control method based on hyperbolic tangent function (HTF) is applied to deal with the torque control signal so that the output of the motor presents the characteristic of flexibility, avoids mechanical damage to the motor and reducer, and enhances the comfort of human–robot interaction.
- (3)
- We propose a trajectory planning method for a point-to-point position-tracking controller based on a normal distribution function. It is successfully applied to the control of the upper-limb exoskeleton.
- (4)
- A flexible multi-joint cooperative controller based on VSDH is successfully applied to solve the constrained control problem of the exoskeletons and the self-motion problem caused by redundant DoFs.
2. Single-Joint Model Flexible Control
2.1. Single-Joint Flexible Based on VSDH
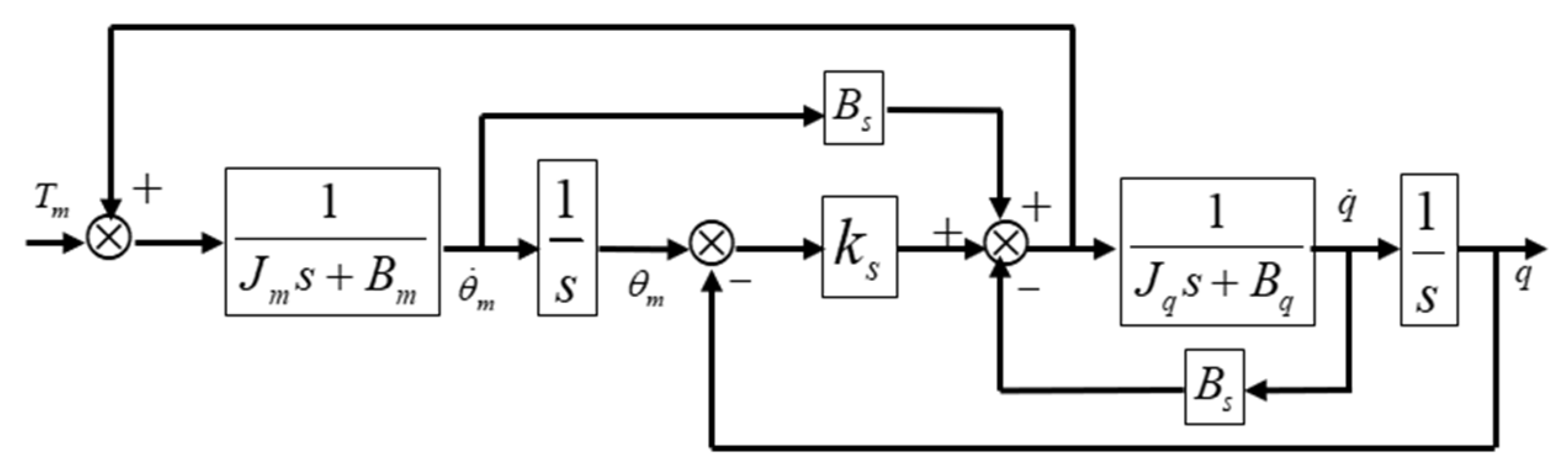
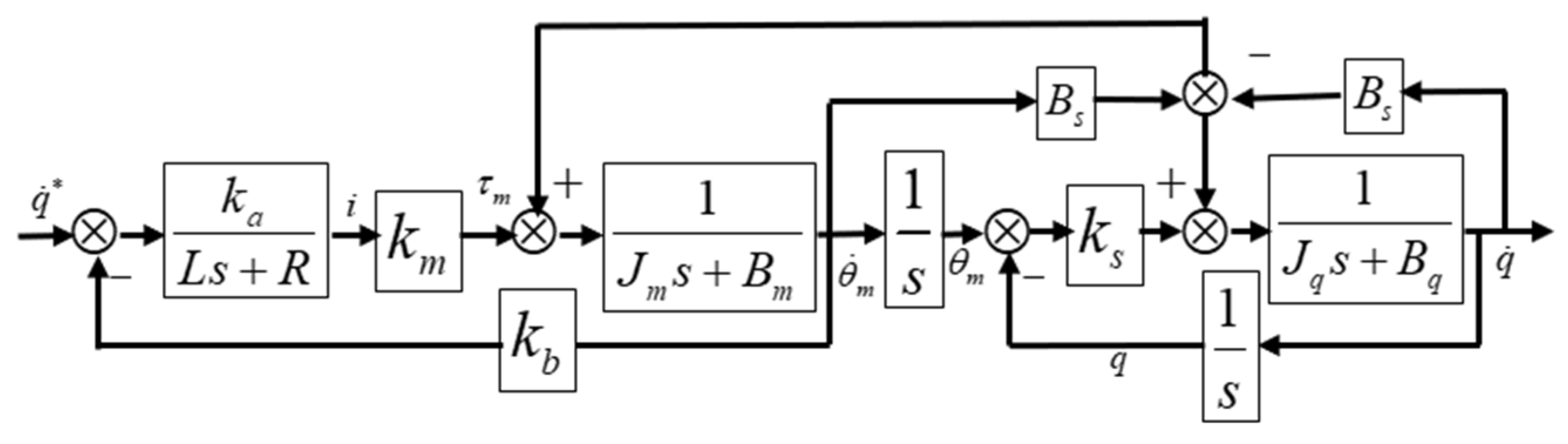
2.2. Velocity Tracking Control of VSD Flexible Joint
2.3. Torque Tracking Control Based on HTF
3. Multi-Joint Cooperative Flexible Control
3.1. Dynamic Equation and Control of Upper-Limb Exoskeleton
- (1)
- It has the dynamic characteristics of “spring and damper”. Equation (19) contains four items. The first item represents the damping moment generated by the virtual damper in joint space, which plays a “braking” role in the system movement. The convergence speed of the system state is changed by designing the value of the damping coefficient matrix C. The second term represents the virtual spring torque. By selecting the stiffness coefficient K, the speed of the endpoint approaching the target position is adjusted.
- (2)
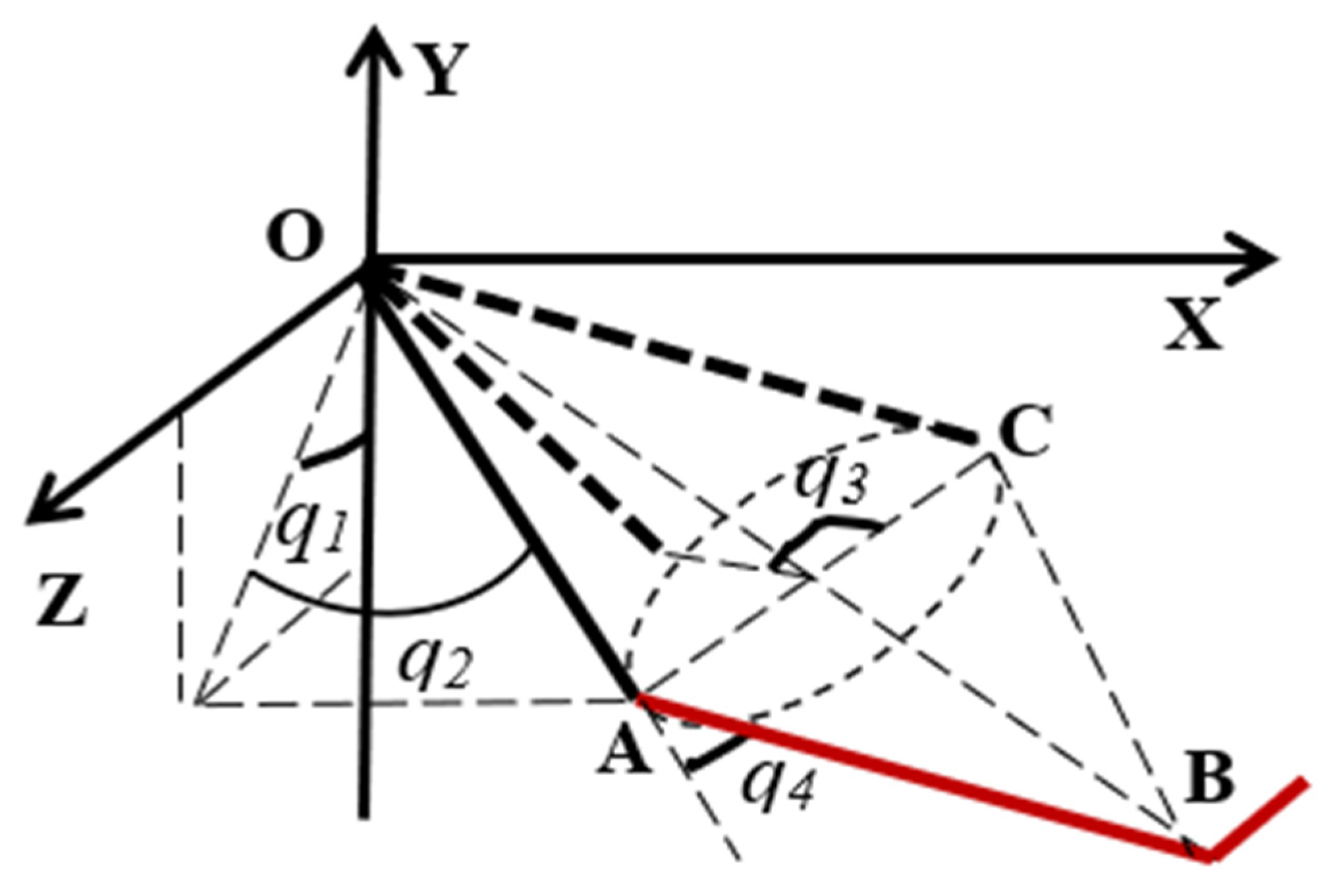
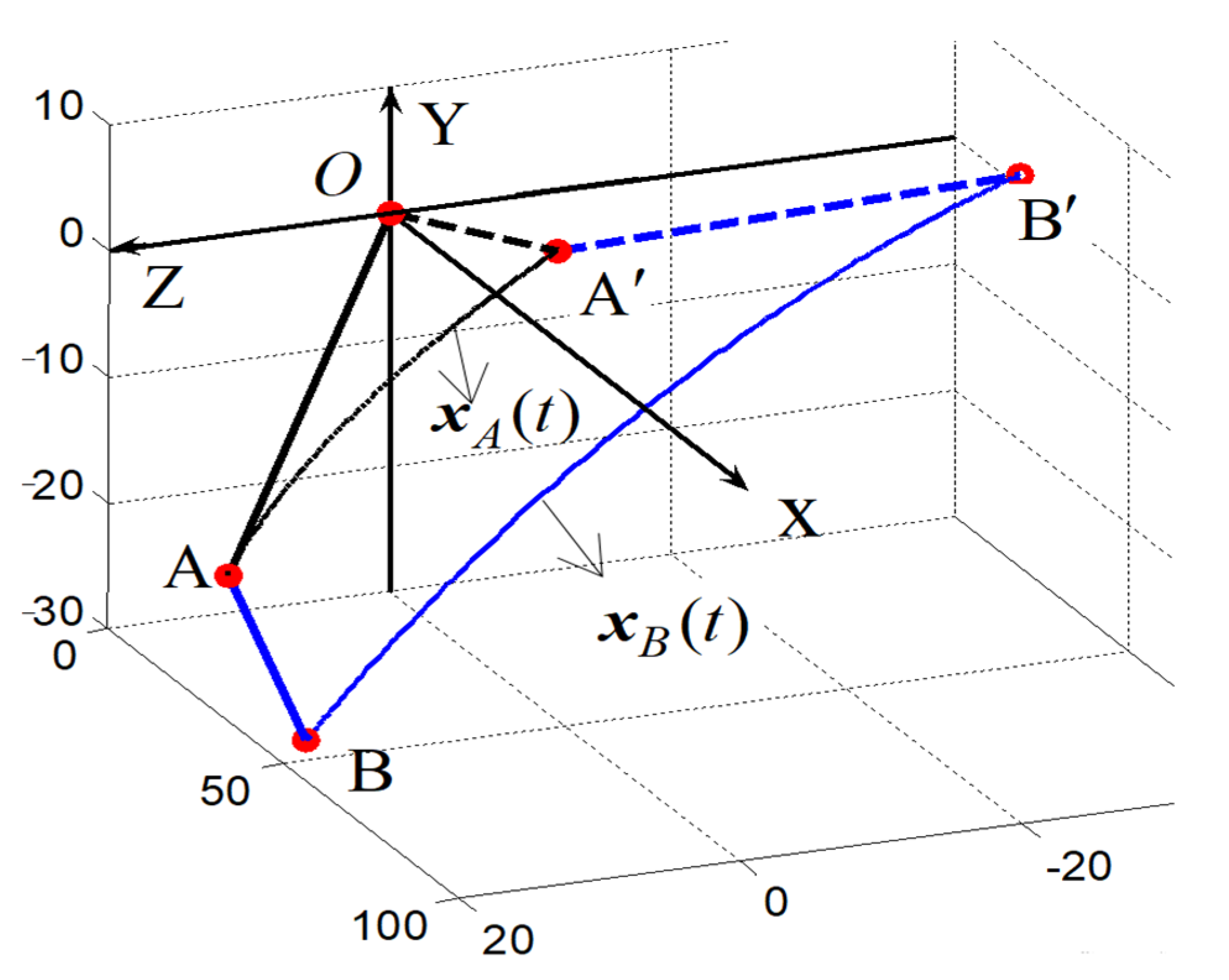
- It has solved the “self-motion problem” [25] caused by redundant DoFs. The dynamic Equation (13) defaults that each joint is a cardan joint, resulting in redundant DoFs, and will produce the “self -motion” shown in Figure 8. Two links OA-AB will rotate freely around the OB axis. The third term is the constraint term. It is added to the controller and can limit the arbitrary self-motion of the exoskeleton.
- (3)
- To directly solve the control problem from task space to joint space, it is not necessary to solve the pseudo-inverse matrix and inverse kinematics. By selecting the appropriate controller parameters C and K, the state of the system can be driven to converge gradually. That is, when , not only , but also , where represents the most comfortable nominal position of the joint angle when the endpoint reaches the target position in the task space.
3.2. Stability Analysis
4. Simulation Results
4.1. Simulation Conditions
4.2. A Velocity Driving Control Method Base on SNDF
- Step 1:
- Determine the initial posture and target posture ;
- Step 2:
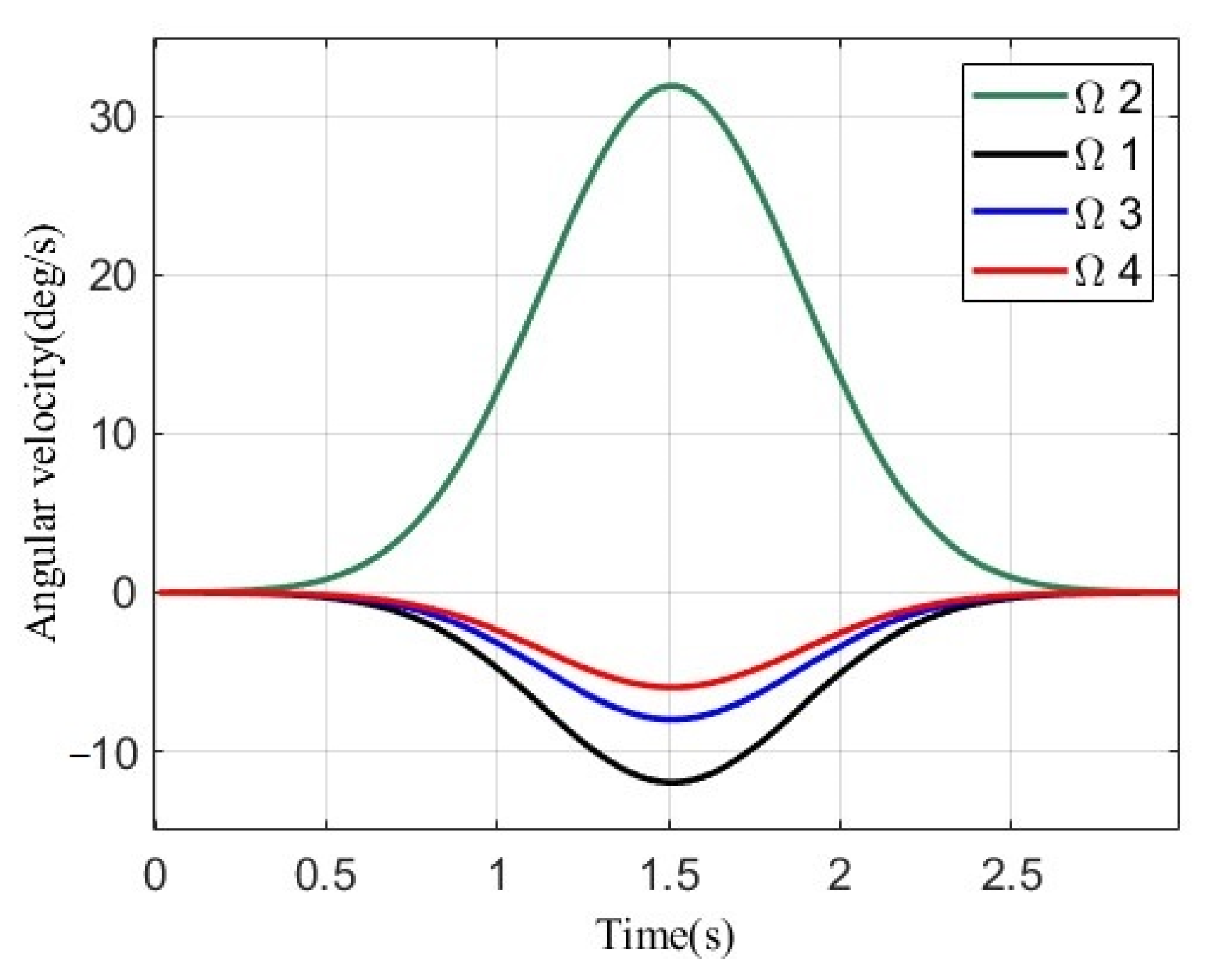
- Map the interval [, q()] to the independent variable interval [-4, +4] of SNDF, and construct the angular velocity as follows:
- Step 3:
- The angular velocity Equation (47) is used as the driving angular velocity of the joint motor. According to the properties of the SNDF, the area enclosed by the function curve and the independent variable coordinate axis is equal to 1. Thus, we can get:
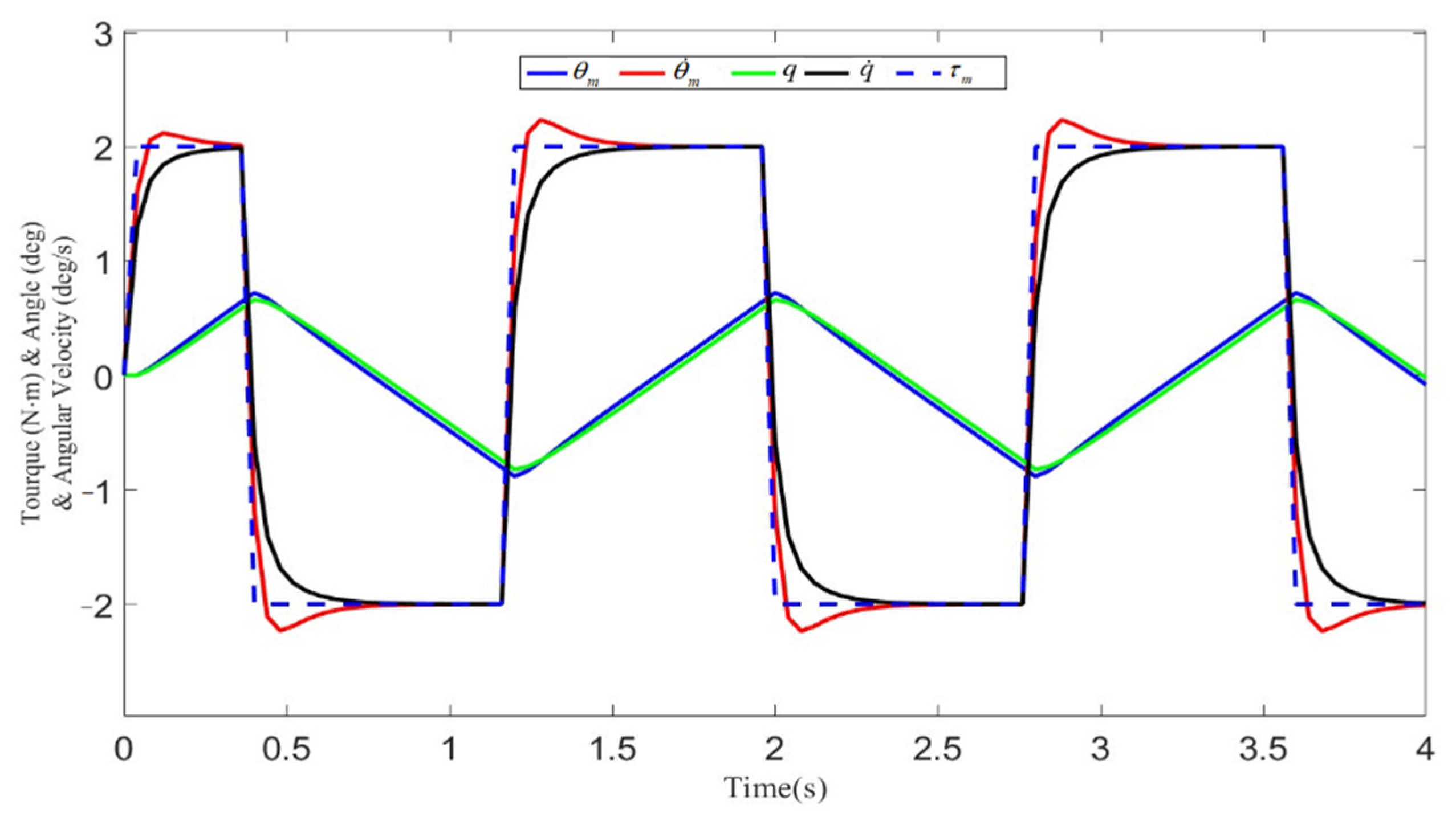
4.3. Simulation Results
4.4. Comparative Analysis
- (1)
- The system in Equation (20) is controllable. The control in Equation (51) can realize that as ., and . That is to say that and can both be controlled by .
- (2)
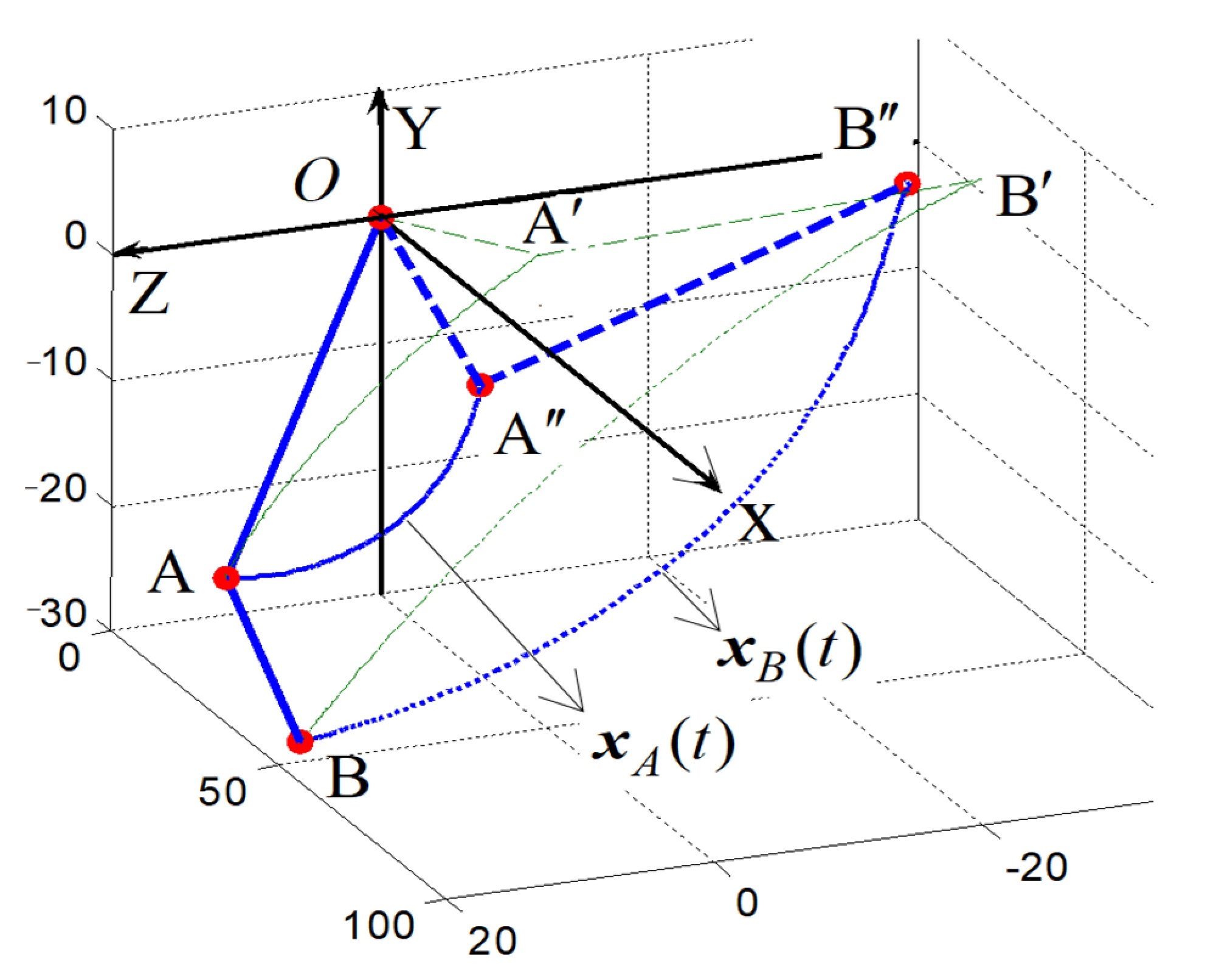
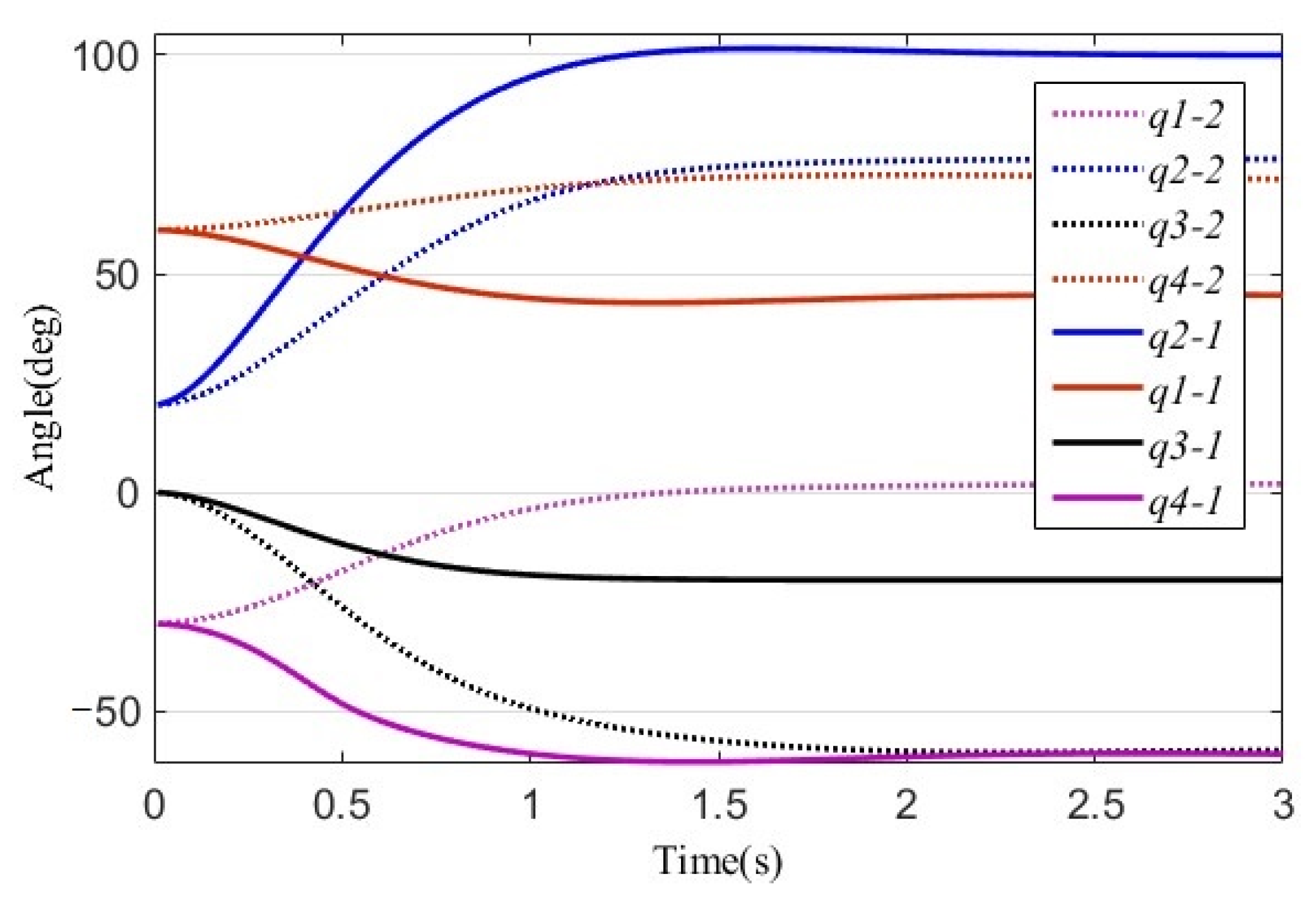
- The “self-motion problem” caused by redundant DoFs will lead to the uncertainty of the posture paths. Two control methods in Equations (50) and (51), achieved completely different posture change paths and endpoint trajectories for the same control target . It can be seen from Figure 14 that the trend of solid and dotted lines of the same color is completely different. The joint angle changes monotonically from to under the control of Equation (50). However, the joint angle under the control of Equation (51) varies according to an uncertain law and finally reaches an uncertain angle position, although the control objectives of and have been achieved already. Compared with the two trajectories and of endpoint B in Figure 13, it can be seen that the trajectories are completely different.
- (3)
- The constraint term added to the controller limits the arbitrary self-motion of the exoskeleton manipulator. It can be seen from Figure 16 that the posture paths of controlled by Equation (19) are completely correct; this trend is the same as that of Equation (50) and completely different from that of Equation (51). Comparative analysis of the three endpoint trajectories is shown in Figure 17. The trajectory of controlled by Equation (19) is closely rectilinear, and the accuracy is the highest.
4.5. Experimental Verification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
Appendix C
References
- Tucan, P.; Vaida, C.; Plitea, N.; Pisla, A.; Carbone, G.; Pisla, D. Risk-Based Assessment Engineering of a Parallel Robot Used in Post-Stroke Upper Limb Rehabilitation. Sustainability 2019, 11, 2893. [Google Scholar] [CrossRef] [Green Version]
- Maciejasz, P.; Eschweiler, J.; Gerlach-Hahn, K.; Jansen-Troy, A.; Leonhardt, S. A survey on robotic devices for upper limb rehabilitation. J. Neuroeng. Rehabil. 2014, 11, 1–29. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, J.; Barry, O.R. Inverse Optimal Robust Adaptive Controller for Upper Limb Rehabilitation Exoskeletons With Inertia and Load Uncertainties. IEEE Robot. Autom. Lett. 2021, 6, 2171–2178. [Google Scholar] [CrossRef]
- Toxiri, S.; Koopman, A.S.; Lazzaroni, M.; Ortiz, J.; Power, V.; de Looze, M.P.; O’Sullivan, L.; Caldwell, D.G. Rationale, implementation and evaluation of assistive strategies for an active back-support exoskeleton. Front. Robot. AI 2018, 5, 53. [Google Scholar] [CrossRef] [Green Version]
- Hull, R.; Turner, A.; Simon, A.; Asbeck, A.T. A Novel Method and Exoskeletons for Whole-Arm Gravity Compensation. IEEE Access 2020, 8, 143144–143159. [Google Scholar] [CrossRef]
- Bauer, G.; Pan, Y.-J. Review of Control Methods for Upper Limb Telerehabilitation With Robotic Exoskeletons. IEEE Access 2020, 8, 203382–203397. [Google Scholar] [CrossRef]
- Rahmani, M.; Rahman, M.H.; Ghommam, J. A 7-DoF Upper Limb Exoskeleton Robot Control Using a New Robust Hybrid Controller International. J. Control. Autom. Syst. 2019, 17, 1–9. [Google Scholar]
- Chen, C.-T.; Lien, W.-Y.; Chen, C.-T.; Wu, Y.-C. Implementation of an upper-limb exoskeleton robot driven by pneumatic muscle actuators for rehabilitation. Actuators 2020, 9, 106. [Google Scholar] [CrossRef]
- Kapsalyamov SHussain, P.; Jamwal, K. State-of-the-Art Assistive Powered Upper Limb Exoskeletons for Elderly. IEEE Access 2020, 8, 178991–179001. [Google Scholar] [CrossRef]
- Bouteraa, Y.; Abdallah, I.B.; Elmogy, A.M. Training of Hand Rehabilitation Using Low Cost Exoskeleton and Vision-Based Game Interface. J. Intell. Robot. Syst. 2019, 96, 31–34. [Google Scholar] [CrossRef]
- Wu, Q.C.; Wang, X.; Du, F.; Zhang, X. Design and control of a powered hip exoskeleton for walking assistance. Int. J. Adv. Robot. Syst. 2015, 12, 18. [Google Scholar] [CrossRef] [Green Version]
- Hu, B.; Zhang, F.; Lu, H.; Zou, H.; Yang, J.; Yu, H. Design and assist-as-needed control of flexible elbow exoskeleton actuated by nonlinear series elastic cable driven mechanism. Actuators 2021, 10, 290. [Google Scholar] [CrossRef]
- Liu, Q.; Liu, Y.; Zhu, C.; Guo, X.; Meng, W.; Ai, Q.; Hu, J. Design and Control of a Reconfigurable Upper Limb Rehabilitation Exoskeleton with Soft Modular Joints. IEEE Access 2021, 9, 166815–166824. [Google Scholar] [CrossRef]
- Xue, J.M. Development of medical exoskeleton rehabilitation robot. Med. Inf. 2019, 32, 19–21. [Google Scholar]
- Xing, L.; Wang, M.; Zhang, J.; Chen, X.; Ye, X. A Survey on Flexible Exoskeleton Robot. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020; pp. 170–174. [Google Scholar]
- Li, Y.; Tong, S.; Li, T. Fuzzy adaptive dynamic surface control for a single-link flexible-joint robot. Nonlinear Dyn. 2012, 70, 2035–2048. [Google Scholar] [CrossRef]
- Lester, L.; Bevins, J.W.; Hughes, C.; Rai, A.; Whalley, H.; Arafa, M.; Shepherd, D.E.T.; Hukins, D.W.L. Range of motion of the metacarpophalangeal joint in rheumatoid patients, with and without a flexible joint replacement prosthesis, compared with normal subjects. Clin. Biomech. 2012, 27, 449–452. [Google Scholar] [CrossRef]
- Ning, Y.; Liu, Y.; Xi, F.; Huang, K.; Li, B. Human-Robot Interaction Control for Robot Driven by Variable Stiffness Actuator with Force Self-Sensing. IEEE Access 2021, 9, 6696–6705. [Google Scholar] [CrossRef]
- Lee, S.H.; Lee, H.J.; Lee, K.H.; Nam, K.T.; Koo, J.C. A novel variable stiffness scotch yoke series elastic actuator for enhanced functional stiffness. Microsyst. Technol. 2020, 26, 3395–3402. [Google Scholar] [CrossRef]
- Narayan, J.; Abbas, M.; Dwivedy, S.K. Transpose Jacobian Control of Flexible Joint Upper Limb Exoskeleton System. In Machines, Mechanism and Robotics; Lecture Notes in Mechanical Engineering; Springer: Singapore, 2022. [Google Scholar]
- Bae, J.; Kim, K.; Huh, J.; Hong, D. Variable Admittance Control with Virtual Stiffness Guidance for Human-Robot Collaboration. IEEE Access 2020, 8, 117335–117346. [Google Scholar] [CrossRef]
- Wiech, J.; Eremeyev, V.A.; Giorgio, I. Virtual spring damper method for nonholonomic robotic swarm self-organization and leader following. Contin. Mech. Thermodyn. 2018, 30, 1091–1102. [Google Scholar] [CrossRef] [Green Version]
- Piemngam, K.; Nilkhamhang, I.; Bunnun, P. A Virtual Spring Damper Method for Formation Control of the Multi Omni-Directional Robots in Cooperative Transportation. In Proceedings of the 2019 11th International Conference on Information Technology and Electrical Engineering (ICITEE), Bangkok, Thailand, 10–11 October 2019; pp. 1–6. [Google Scholar]
- Wang, W.D.; Zhang, J.B.; Wang, X.; Yuan, X.Q.; Zhang, P. Motion intensity modeling and trajectory control of upper limb rehabilitation exoskeleton robot based on multi-modal information. Complex Intell. Syst. 2022. [Google Scholar] [CrossRef]
- Seraji, H. Configuration Control of Redundant manipulators: Theory and implementation. IEEE Trans. Robot. Autom. 1989, 5, 472–490. [Google Scholar] [CrossRef]
- Arimoto, S.; Sekimoto, M.; Hashiguchi, H.; Ozawa, R. Natural resolution of illposedness of inverse kinematics for redundant robots: A challenge to Bernstein’ s degrees-of-freedom problem. Adv. Robot. 2005, 19, 401–434. [Google Scholar] [CrossRef]
- Hollerbach, J.M.; Suh, K.C. Redundancy Resolution of Manipulation through Torque Optimization. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), St. Louis, MO, USA, 25–28 March 1985; pp. 234–249. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| k | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| N = 2 | −5 | 0 | 5 | \ | \ | \ | \ | \ | \ | \ | \ |
| N = 4 | −5 | −2.5 | 0 | 2.5 | 5 | \ | \ | \ | \ | \ | \ |
| N = 6 | −5 | −10/3 | −5/3 | 0 | 5/3 | 10/3 | 5 | \ | \ | \ | \ |
| N = 8 | −5 | −15/4 | −10/4 | −5/4 | 0 | 5/4 | 10/4 | 15/4 | 5 | \ | \ |
| N = 10 | −5 | −4 | −3 | −2 | −1 | 0 | 1 | 2 | 3 | 4 | 5 |
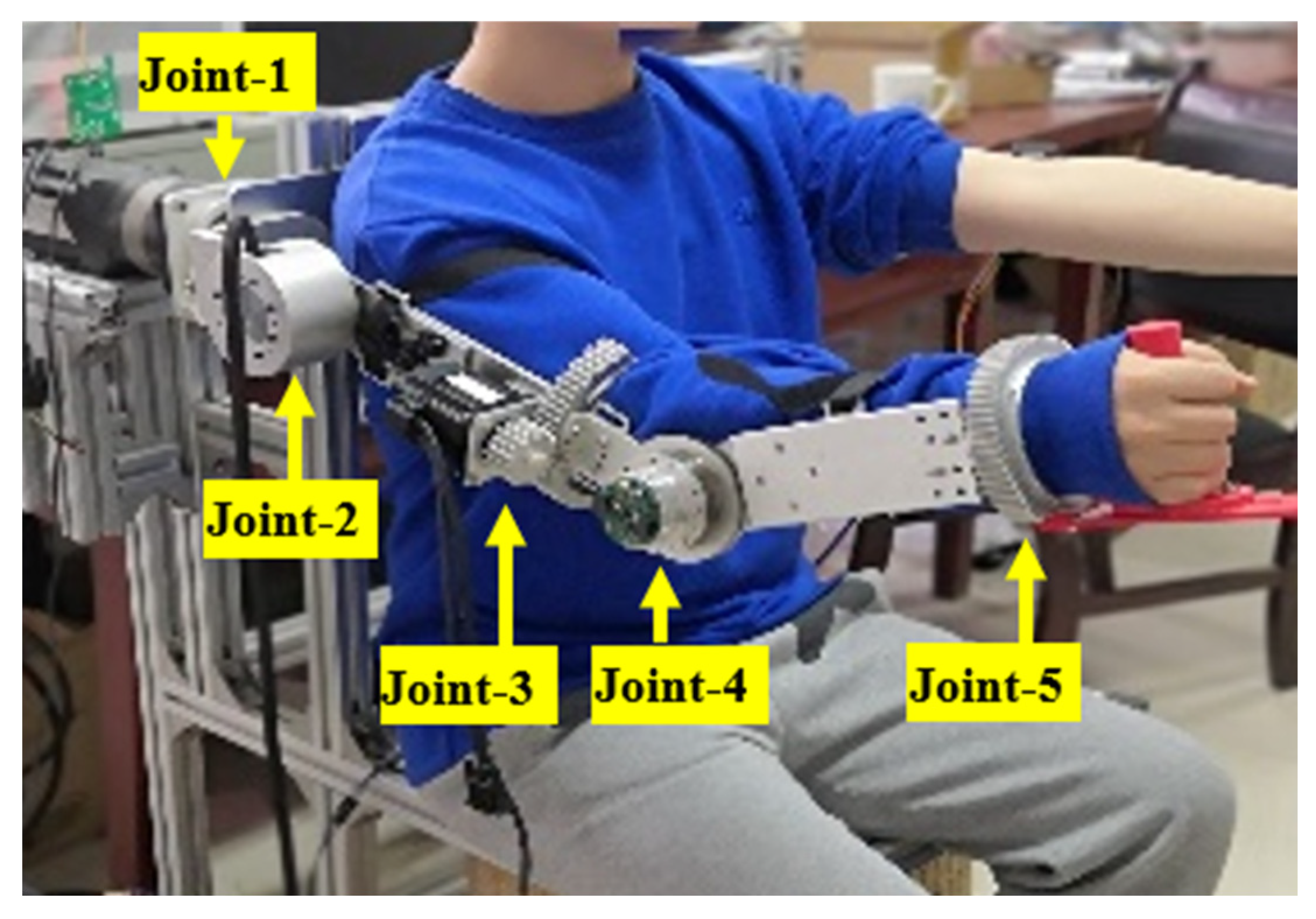
| Joint | Action | Joint Code | Angle Range |
|---|---|---|---|
| Shoulder-1 | abduction/adduction | Joint-1 | 0–100°/0–20° |
| Shoulder-2 | flexion/extension | Joint-2 | 0–150°/0–20° |
| Shoulder-3 | external/internal rotation | Joint-3 | 0–75°/0–45° |
| Elbow | flexion/extension | Joint-4 | 0–135°/0° |
| Wrist | external/internal rotation | Joint-5 | 0–90°/0–90° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, D.; Wang, W.; Shi, Y.; Kong, L. Flexible Control Strategy for Upper-Limb Rehabilitation Exoskeleton Based on Virtual Spring Damper Hypothesis. Actuators 2022, 11, 138. https://doi.org/10.3390/act11050138
Kong D, Wang W, Shi Y, Kong L. Flexible Control Strategy for Upper-Limb Rehabilitation Exoskeleton Based on Virtual Spring Damper Hypothesis. Actuators. 2022; 11(5):138. https://doi.org/10.3390/act11050138
Chicago/Turabian StyleKong, Dezhi, Wendong Wang, Yikai Shi, and Lingyun Kong. 2022. "Flexible Control Strategy for Upper-Limb Rehabilitation Exoskeleton Based on Virtual Spring Damper Hypothesis" Actuators 11, no. 5: 138. https://doi.org/10.3390/act11050138
APA StyleKong, D., Wang, W., Shi, Y., & Kong, L. (2022). Flexible Control Strategy for Upper-Limb Rehabilitation Exoskeleton Based on Virtual Spring Damper Hypothesis. Actuators, 11(5), 138. https://doi.org/10.3390/act11050138