1. Introduction
In recent years, advanced robotic technology has been applied for the rehabilitation of patients with stroke, neural diseases, and traumatic injuries. A recent review of rehabilitation robots and devices is illustrated in [
1,
2].
In rehabilitation therapies, repetitive and progressive functional training exercises are performed to gain motor abilities recovery and reconstruction of neuroplasticity [
3]. Rehabilitation robots have been employed for the delivery of active-assistive, active-resistive, passive, and adaptive exercises of both upper and lower extremities. Comprehensive reviews of the robotic rehabilitation devices classified according to extremities can be found in previous works [
4,
5,
6].
Rehabilitation is an area of robotics in which human–robot collaboration occurs. Actuator adaptability, inherent compliance, comfort, safety, versatility, and adaptability to individuals are the typical issues to be resolved. To bring advancements to the main issues for rehabilitation devices, different approaches have been developed based on actuator technologies and control system design points.
Soft actuators in rehabilitation devices are preferred due to inherent compliance and high force weight ratio, which is illustrated and criticized in [
7]. Soft actuators can be easily integrated with rehabilitation devices. Among the soft actuators, pneumatic artificial muscles are preferred in some rehabilitation devices because of their versatile installation and low maintenance requirements. They could be primarily operated without electrical signals where the applied device becomes electrically safe for human interaction and interference problems [
8].
Pneumatic artificial muscle (PAM) is a mature soft actuator and has been developed for more than three decades and manufactured in mass production for general industrial automation [
9]. The pneumatic artificial muscle (PAM) is a fiber woven rubber actuator that changes its active length when applied pressure changes. PAM could demonstrate similar behavior to the human muscle as compared to common actuators, for instance, motors, hydraulic, and pneumatic actuators. When pneumatic artificial muscles (PAM) are pressurized, they contract and generate force in a nonlinear manner of radial inflation in size and axial contraction that yields pulling forces. It has a little weight and a great power/weight ratio. Moreover, the PAM has built-in compliance that makes it a possible solution for exoskeletons and rehabilitation robots [
10]. However, compliance arises from nonlinear characteristics and generates obstructions in modeling and controlling actions. It is a critical issue limiting the use of PAM. The dynamic characteristics of PAM arenonlinearity, hysteresis, and time-varying responses. Therefore, it becomes very challenging to model the dynamics and to operate with model-based controllers.
PAM is not widely implemented in general robotic applications because of its critical disadvantages, for instance, slow response and inherent nonlinear characteristics. On the contrary, the disadvantages considerable for robotic applications are not crucial for rehabilitation devices where soft actuation behavior is more important. Looking from that perspective, PAM could be a major actuator type for rehabilitation robots and devices.
In the literature, there are many projects which use PAM as the actuator for both upper and lower extremity rehabilitation devices. The reviews discussing recent mechanical structures and control strategies for the rehabilitation robots driven by pneumatic artificial muscles are given in [
11,
12]. Most of the implementations are either exoskeletons or robotic orthotic devices [
13,
14].In the majority of those devices, an antagonistic approach and a double-acting actuation are implemented similar to human musculoskeletal configuration.
In addition, there are also simpler applications such as robotic elbow orthoses, robotic knee orthoses, and continuous passive motion (CPM) exercise machines. Robotic orthoses and CPM devices are used for repetitive 1-DOF cyclic motions and are used for elbow, knee, and ankle rehabilitation to treat spasticity and contractures. In those applications, a single PAM is utilized as the actuator against gravitational forces. The examples are illustrated in [
15,
16,
17,
18,
19]. In these configurations, counteraction is either supported by gravitational forces or opposing springs. In
Figure 1, the simplified mechanism diagrams for the PAM-actuated elbow orthosis and the CPM device for knee rehabilitation are presented.
Many up-to-date, different control approaches have been used for PAM-actuated rehabilitation devices. The classical PID control is the most used method in combination with empirical models which are developed using geometrical and phenomenological models, based on the application design [
20,
21]. Empirical model-based compensators are used to enhance PID in [
22]. PID is also enhanced with other techniques such gain scheduled PID in [
23]. The nonlinear control methods such as the sliding mode are implemented in [
24]. Adaptive control and model reference adaptive control methods (MRAC) are also implemented in [
25]. A combination of fuzzy and neuro-fuzzy methods with PID, sliding mode, and adaptive control are widely used as compensators for nonlinear dynamics of PAM stated in terms of either phenomenological or empirical models. A hybrid adaptive control structure in which a conventional PD controller in the feedforward path combined with a fuzzy controller in the adaptation path is illustrated in [
26]. An enhanced adaptive fuzzy sliding mode control approach, a combination of sliding mode and fuzzy rule-based control, is proposed in [
27] using the Lyapunov stability theorem. An intelligent adaptive control algorithm is proposed in [
28] where the adaptive learning is performed by a neural network that adjusts the gains of a fuzzy sliding mode controller (FSMC). A hybrid structure using a dynamical neural network (DNN) and PID controllers are proposed for position control, where a cost function optimized via a particle swarm optimization (PSO) algorithm is used to obtain controller parameters using a geometrical model [
29].
Although there are plenty of previous applications of PAM in use with rehabilitation devices, there are still many issues to be resolved in controlling PAM. In model-based approaches, such as geometrical, empirical, and phenomenological models, the design is quite sensitive to parameter changes. Control approaches that used model-based methods did not obtain desired compliance due to the parametric errors between the models and actual PAM dynamics. Conversely, model-free approaches are developed as an approximation of PAM dynamics using AI-based techniques. More specifically, the developed approaches have the following drawbacks.
- 1.
In many applications, the controlled range of motion (ROM) is quite limited, for instance −20 to +20 degrees which is not enough for many rehabilitation exercises.
- 2.
Compliance with external forces and load variation is very specific to implementations.
- 3.
PAM behavior is estimated as direct input–output, single-input single-output (SISO) models in terms of pressure and force but muscle contraction length is interpreted in model parameter approximations.
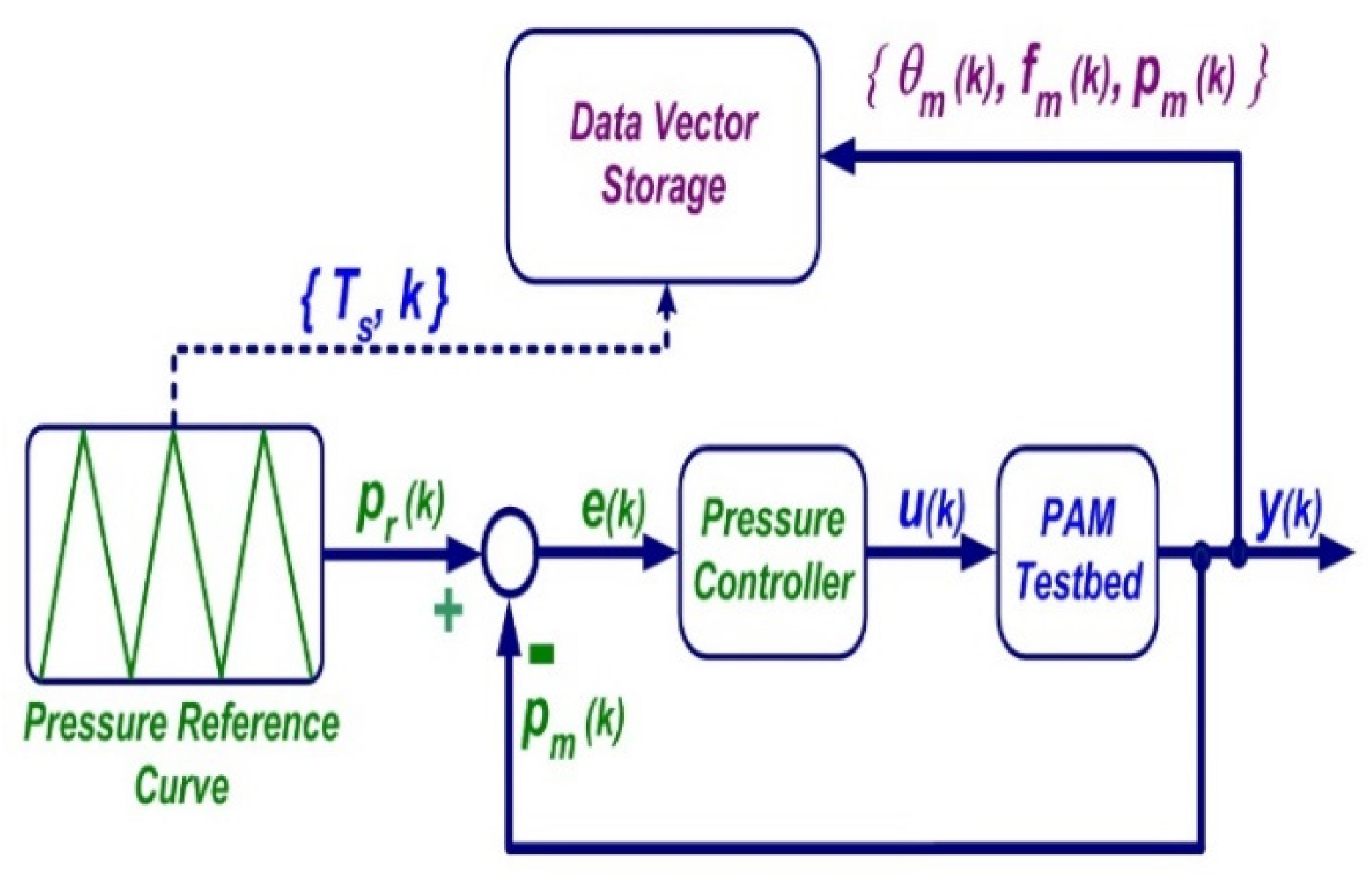
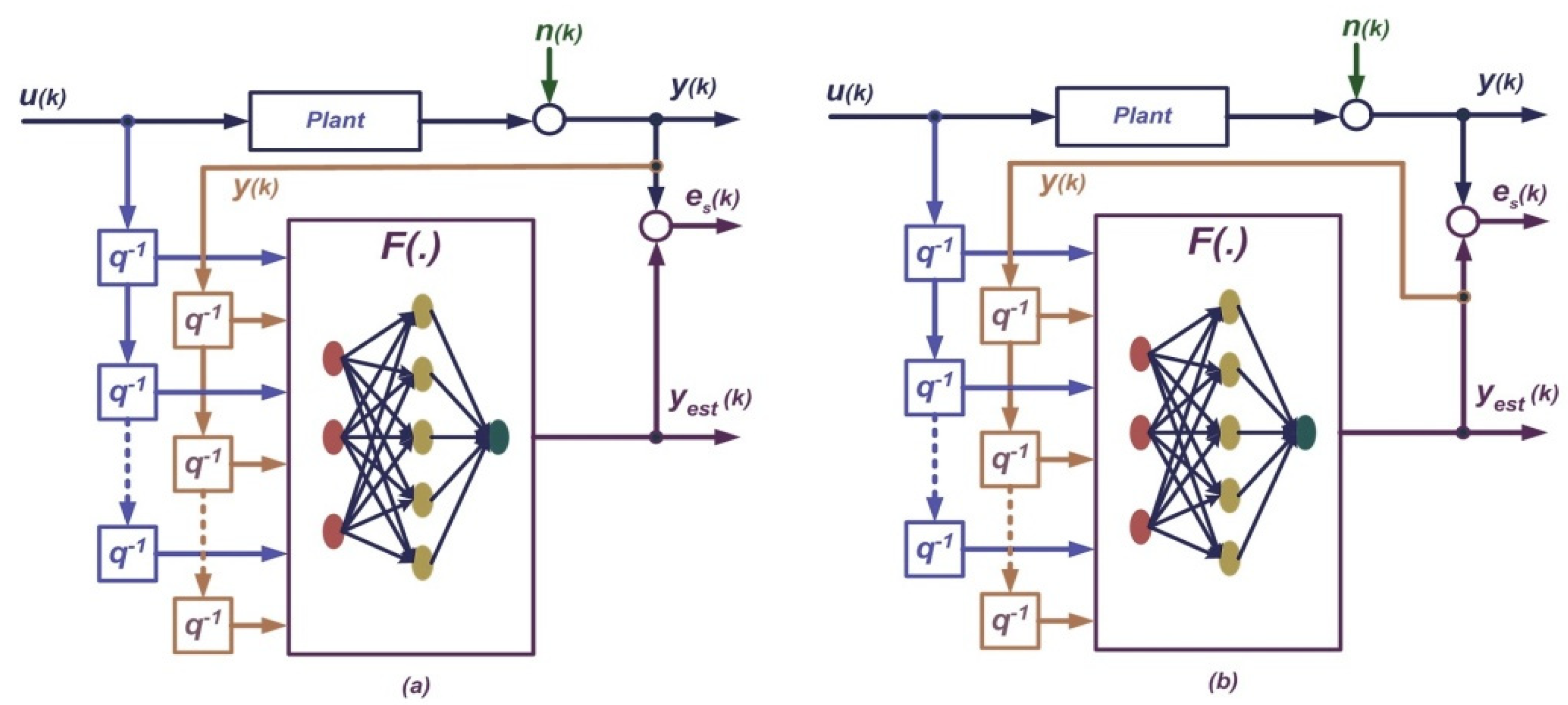
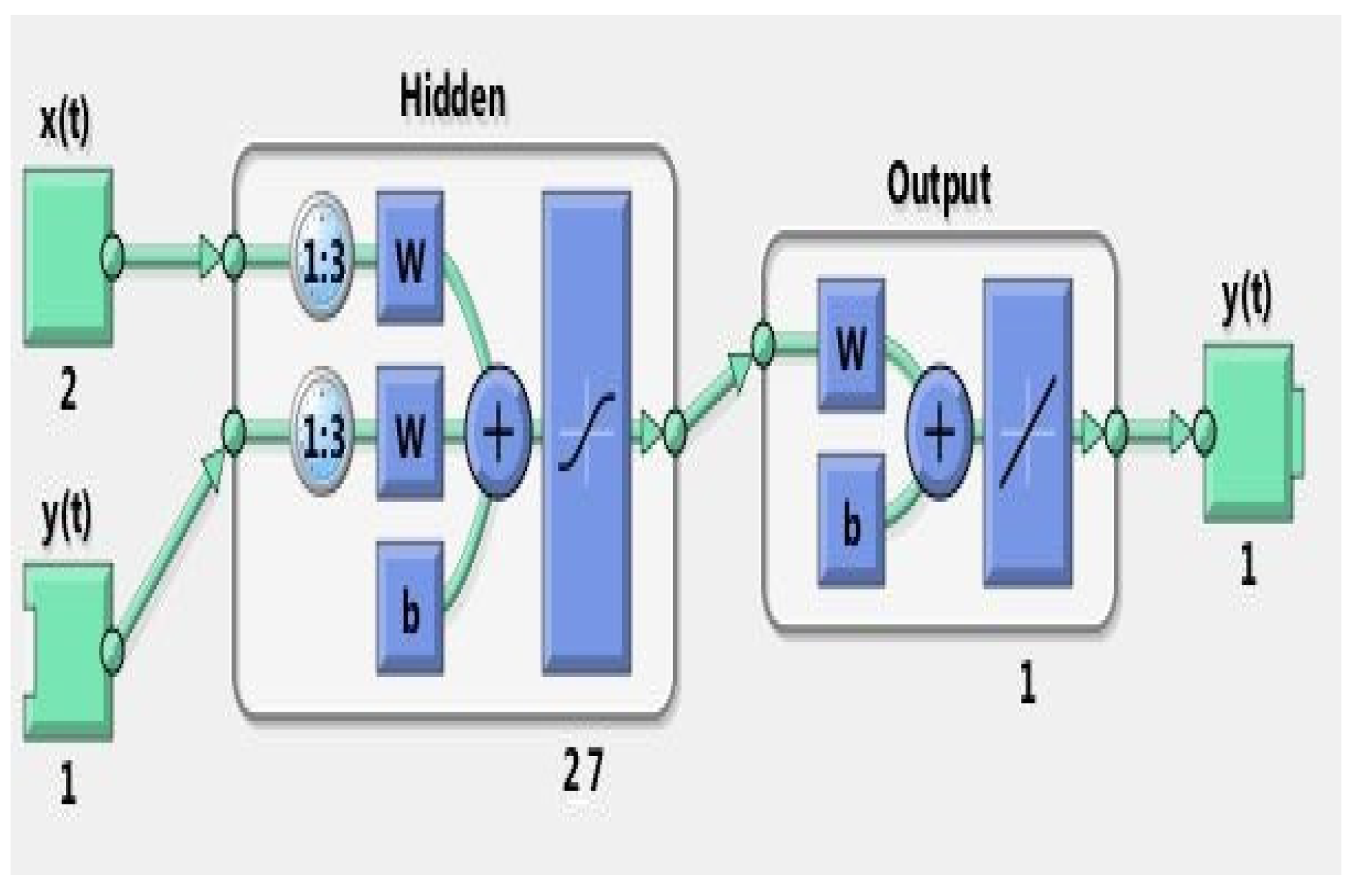
In this work, distinct from existing modeling works, the dynamic behavior of PAM has been estimated as an incorporated response to pressure input, resulting in simultaneous force and muscle length change. Hence, it is decided that standard SISO models with a direct input–output relation are not suitable for representing that behavior. Therefore, a multi-input single-output (MISO) inverse modeling approach given in [
30] is implemented to utilize in control applications, MISO inverse model is developed by using an artificial neural network (ANN) structure utilizing the data produced during the PAM testbed experiments. In the approach, the MISO inverse model combines the desired actuator position with dynamic muscle length and simultaneous force generation demand yielding an output that is used as a low-level pressure set value for the PID pressure control loop. The approach is also distinct from [
31], where a multi-input multi-output (MIMO) NARX-based inverse dynamic modeling of 2-DoF PAM-actuated robot arm is implemented. In that work, NARX-based inverse modeling uses joint angles as the inputs and end effector contact force and valve voltages as outputs, in order to model the complete robotic mechanism. On the contrary, the implemented approach in [
30] is MISO and models the inverse dynamics of PAM solely by taking muscle dynamic length and muscle force as the inputs and muscle pressure as the output, which is being independent of the application mechanism or testbed. By this means, inverse PAM modeling could be transported to the control applications of different mechanisms.
Inverse dynamics model learning is initially proposed by Gomi and Kawato for impedance learning of 2-DoF robotic arm [
32]. This approach is based on feedback error learning used for feedforward control of nonlinear dynamic systems. Further application of feedback error learning for nonlinear adaptive control is presented in [
33] with Lyapunov stability analysis.
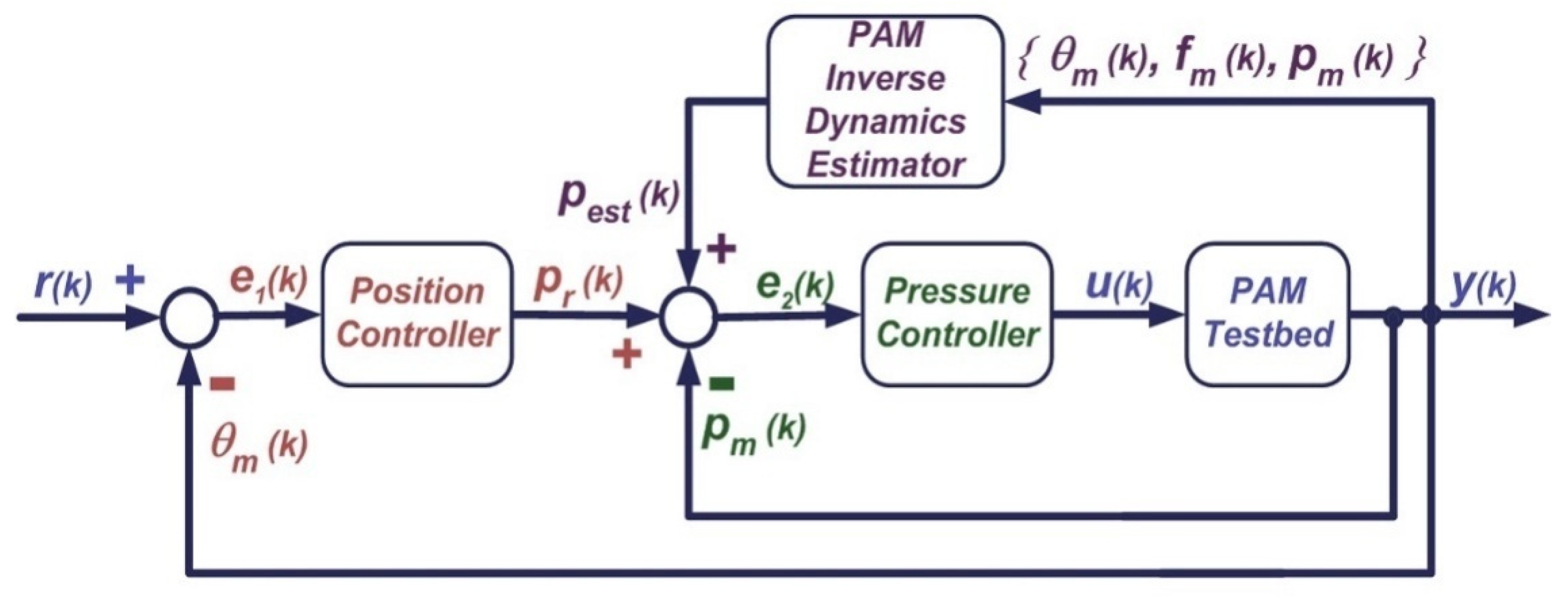
In this work, MISO inverse modeling and inverse dynamics model learning approaches are combined to obtain a novel nonlinear adaptive control scheme for single PAM-actuated rehabilitation devices such as robotic orthoses and CPM, to bring an alternative solution to compensate for the drawbacks of previous works. The MISO inverse dynamics model learning is implemented as an adaptive nonlinear feedback controller.
Employing the proposed approach, it is aimed to obtain:
- 1.
Larger controlled ROM up to 90 degrees.
- 2.
Better compliance to external forces and load variation.
- 3.
Estimation of PAM dynamic behavior, independent of application mechanism.
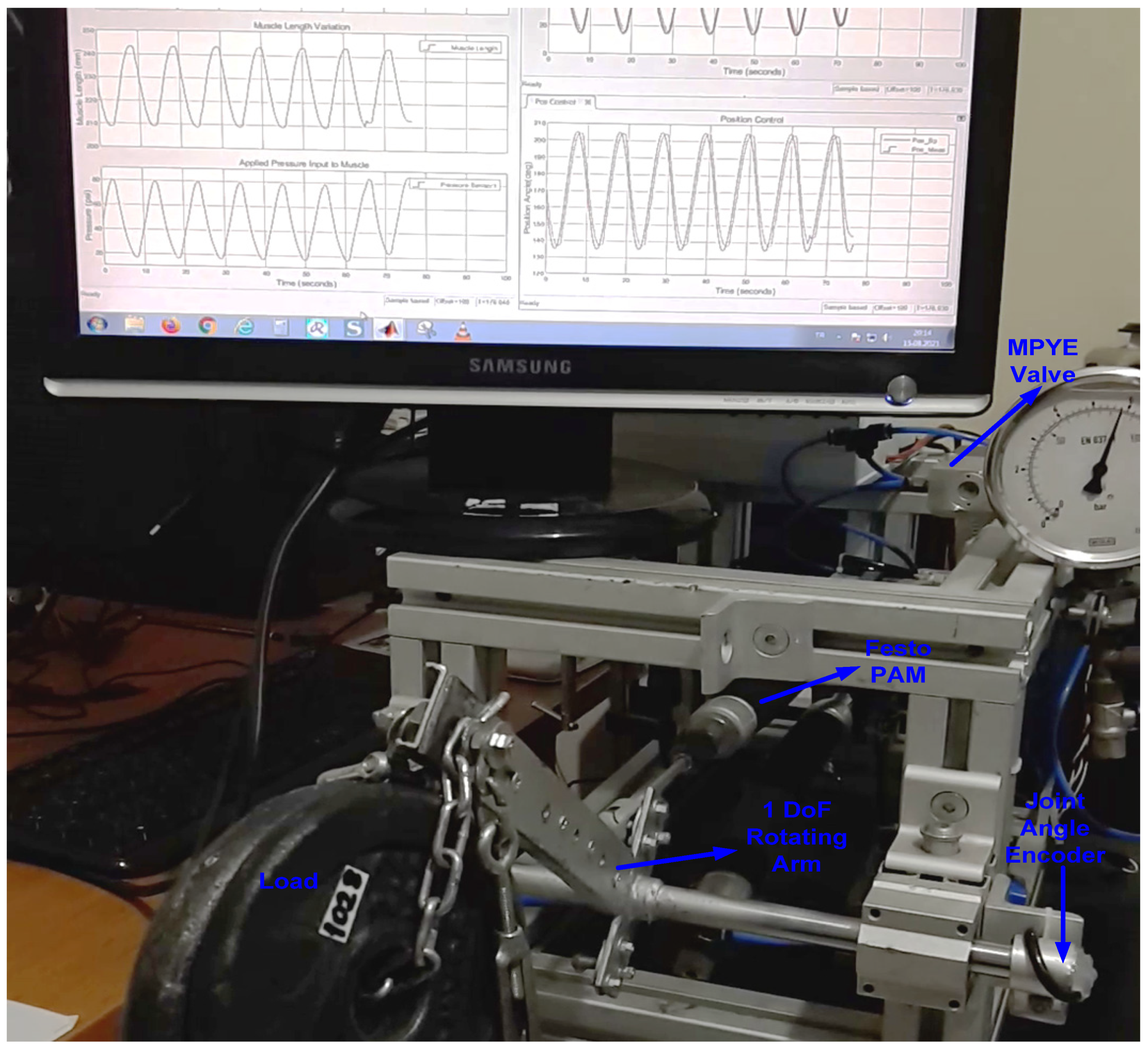
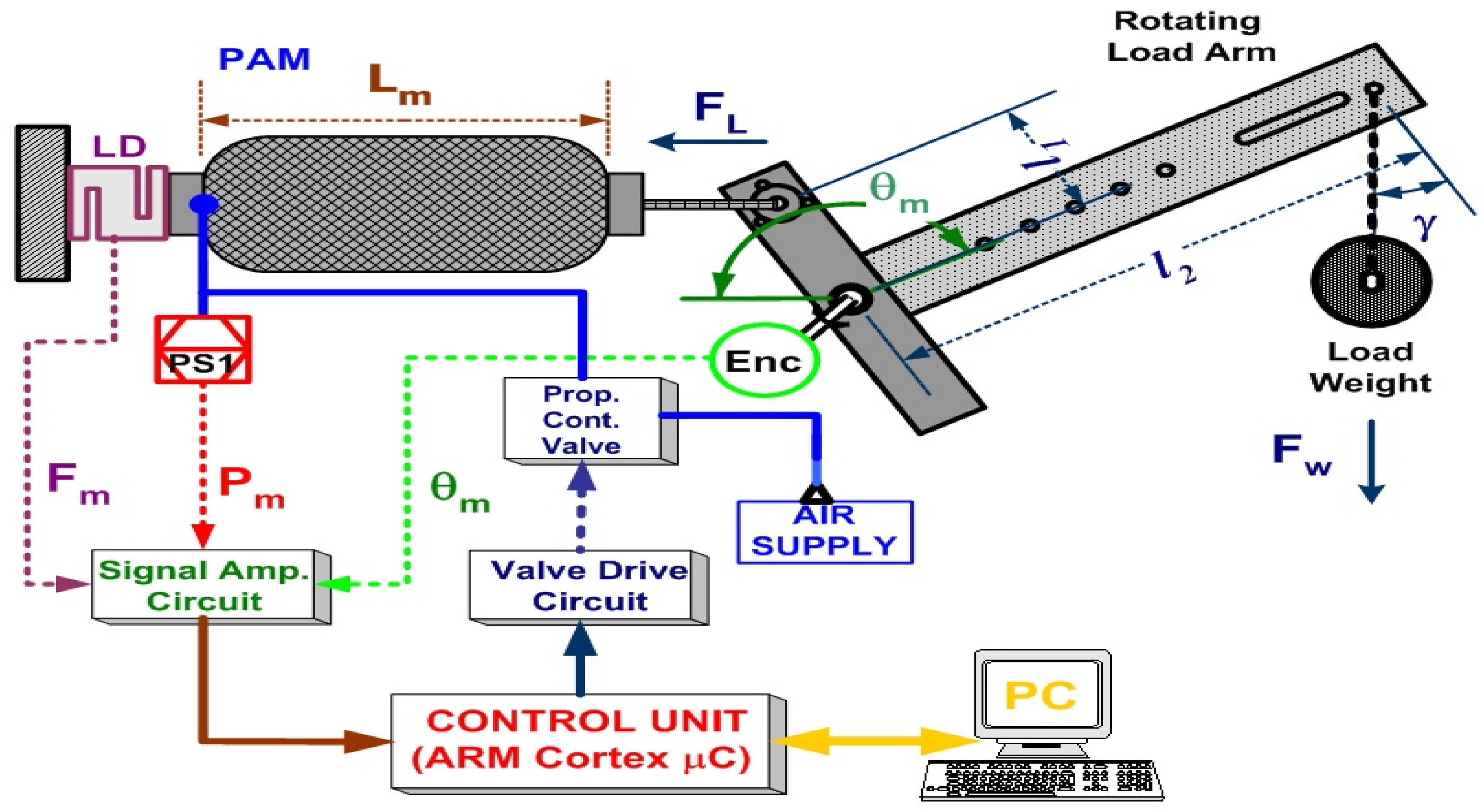
The proposed method is experimentally implemented using the testbed given in
Figure 2, which is a 1-DoF rotary arm actuated by a single PAM. The testbed represents 1 DoF robotic orthoses or CPM devices running against the gravitational forces for repetitive exercise patterns.
Implementation details of our proposed method are presented in the next sections.
The rest of the paper is as follows: In
Section 2, the implementation of the proposed MISO inverse modeling and nonlinear adaptive control method is given. Experimental testbed setup and data acquisition are also explained in detail. In
Section 3, experimental results for different situations are presented. In
Section 4, discussions are presented with future possibilities.
4. Discussion
In this work, a novel control system is designed and experimentally implemented to bring an alternative solution to the compliant operation of PAM while performing exercise trajectories, to satisfy requirements such as larger ROM and adaptability to external load impedance variations. MISO inverse modelling and inverse dynamics model learning approaches are combined to obtain a novel nonlinear adaptive control scheme for single PAM-actuated 1-DOF rehabilitation devices, such as robotic knee orthoses, robotic elbow orthoses, and other continuous passive motion (CPM) devices. The control system combines the operation of a NARX-based inverse dynamics estimator used as a global range controller and cascade PIDs for local position and pressure control loops.
The control system is also distinct from other NARX-based inverse dynamic modeling approaches found in the literature. In [
31,
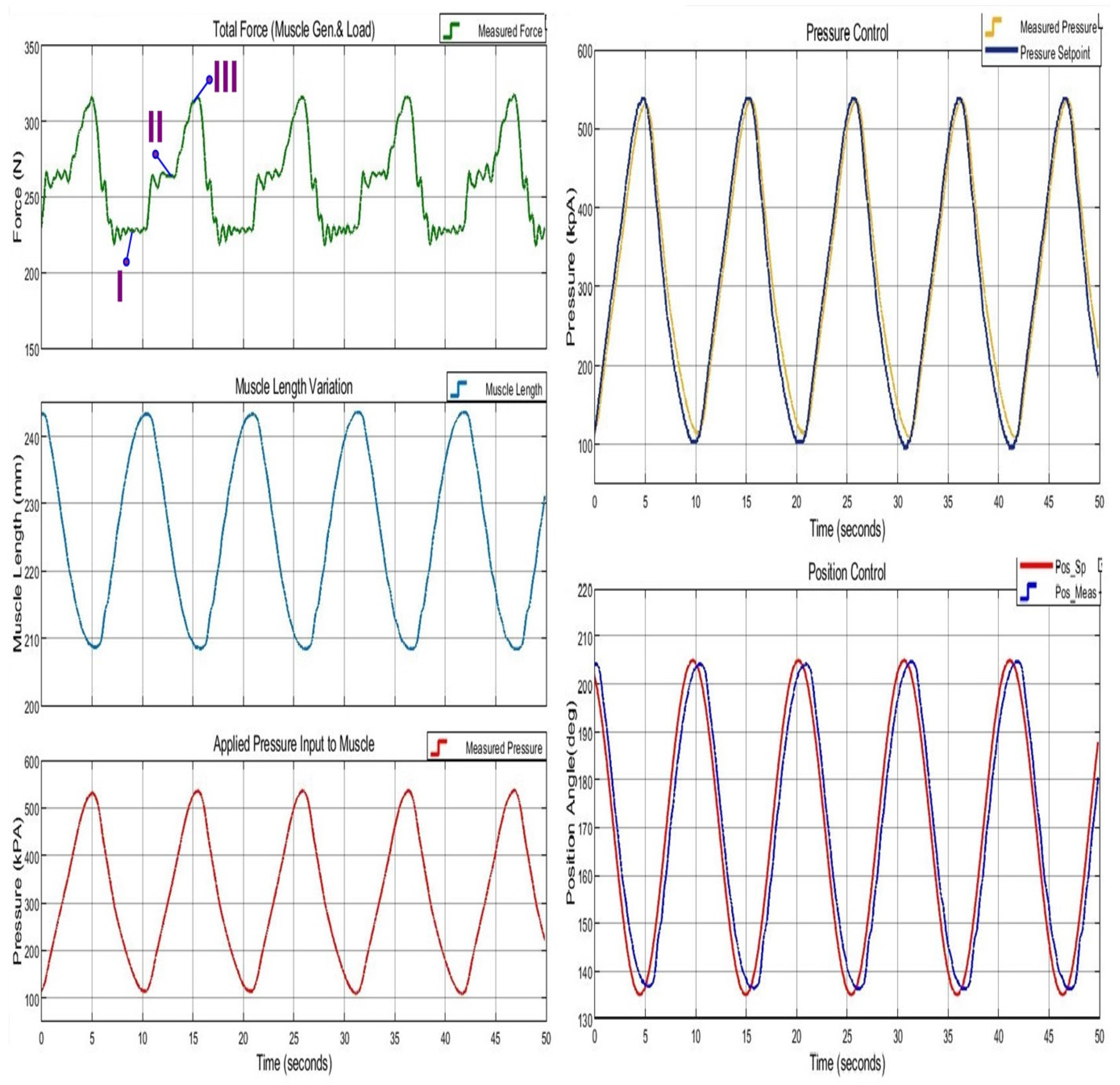
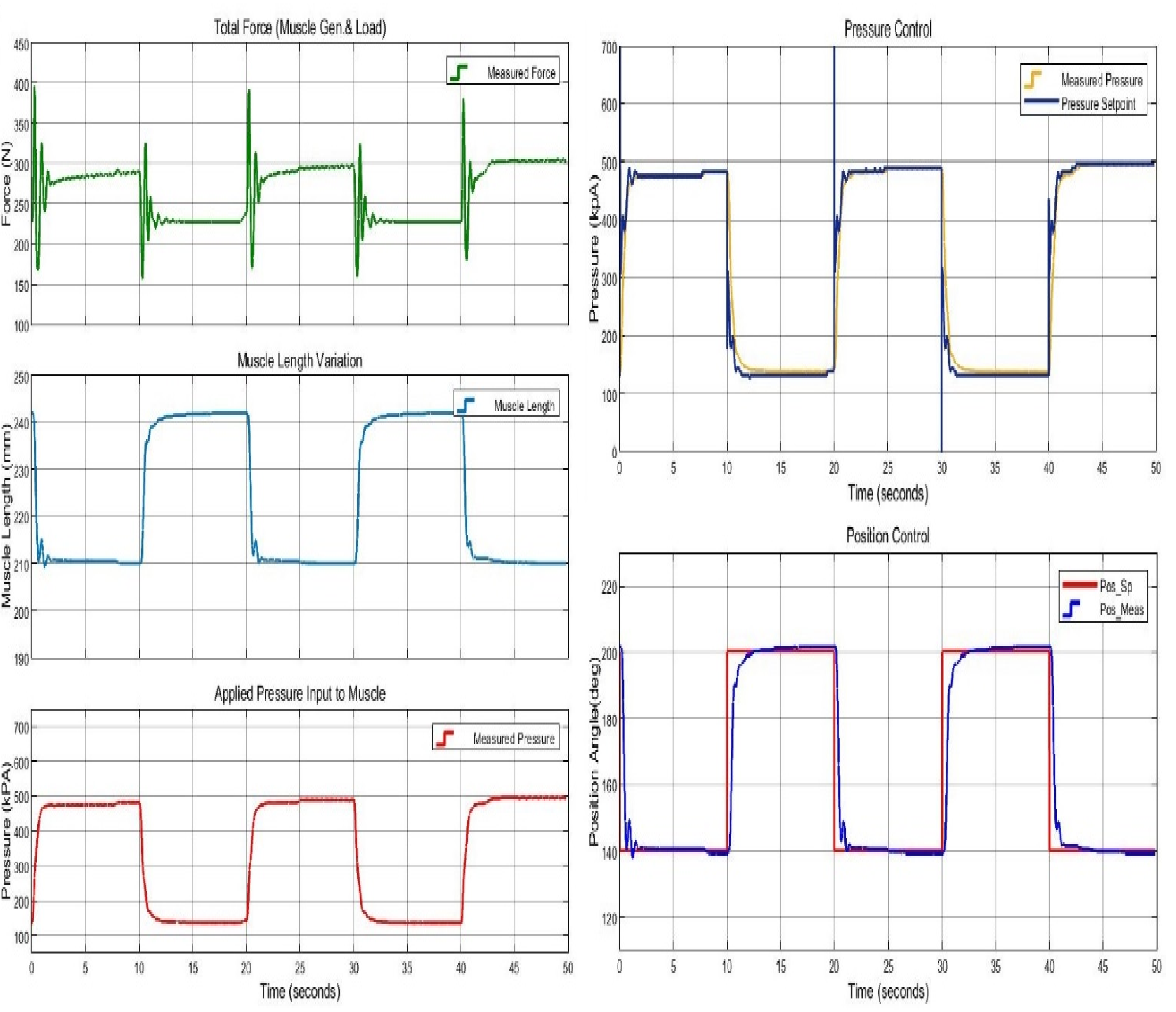
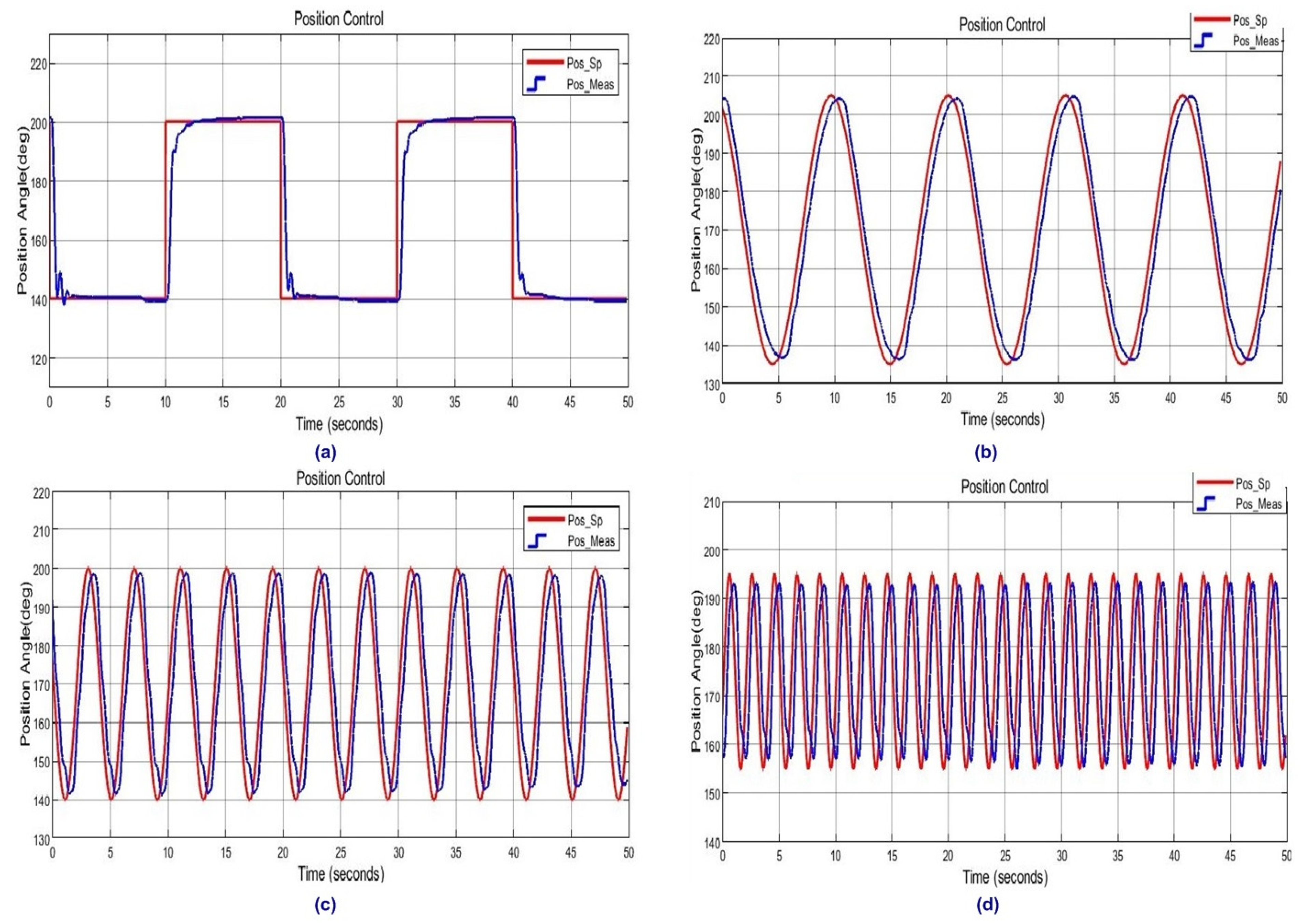
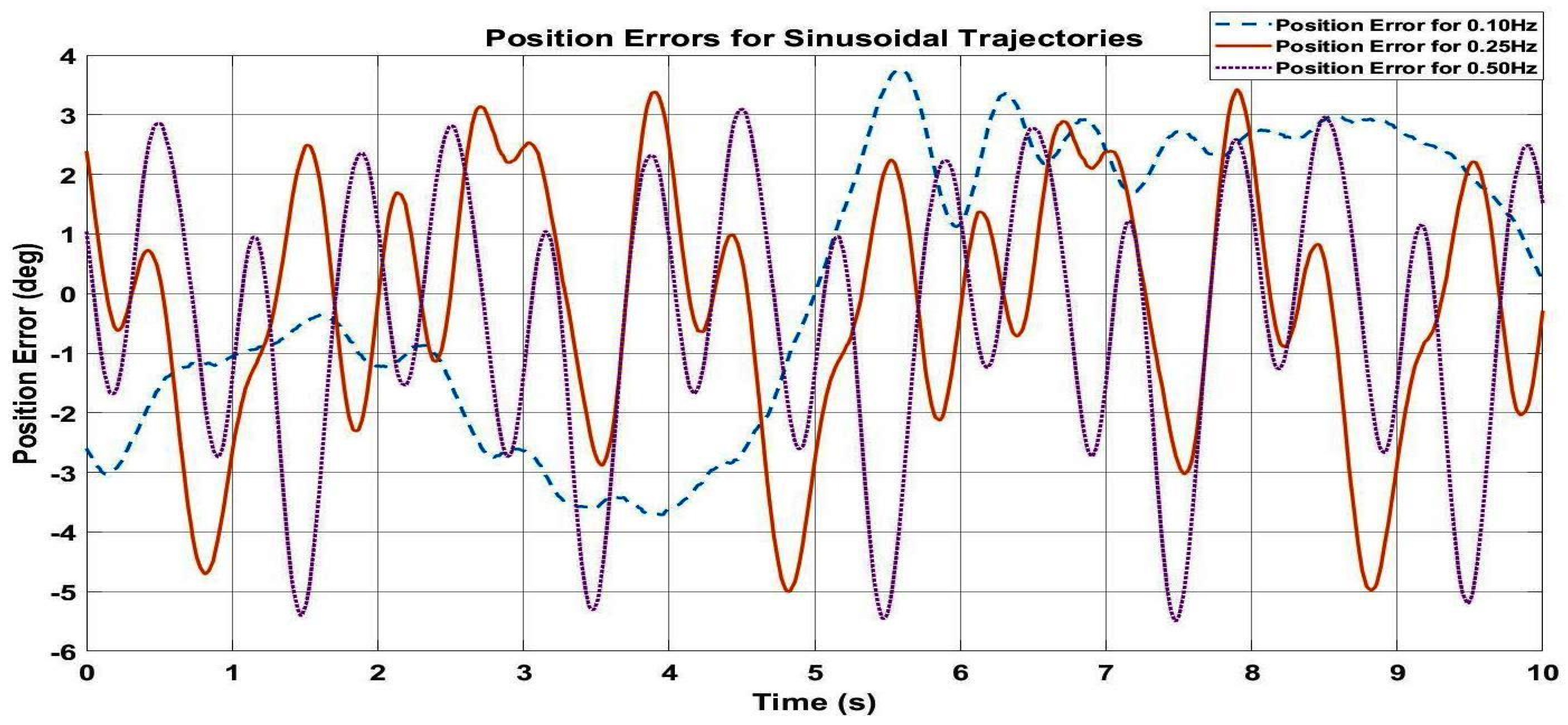
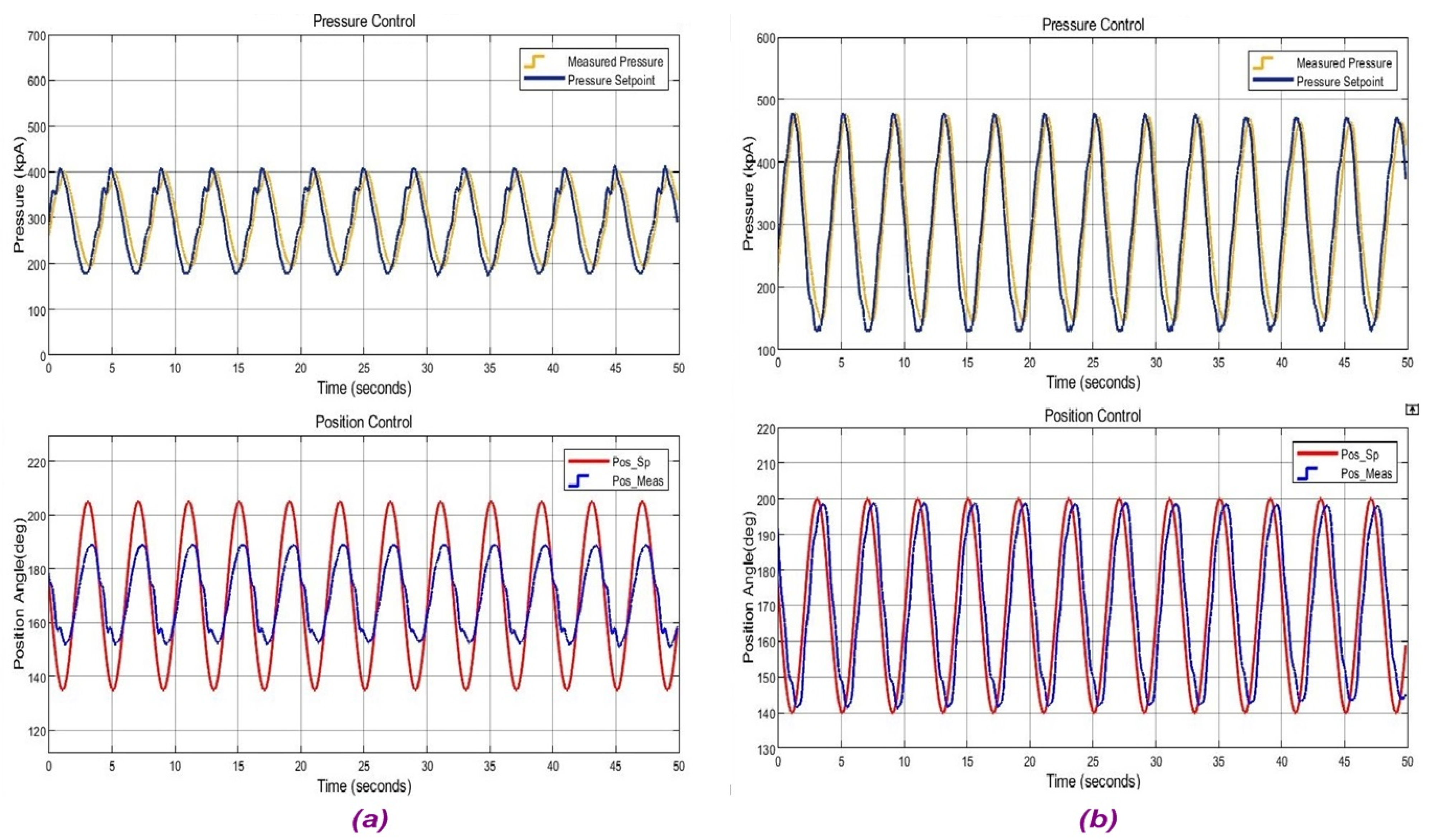
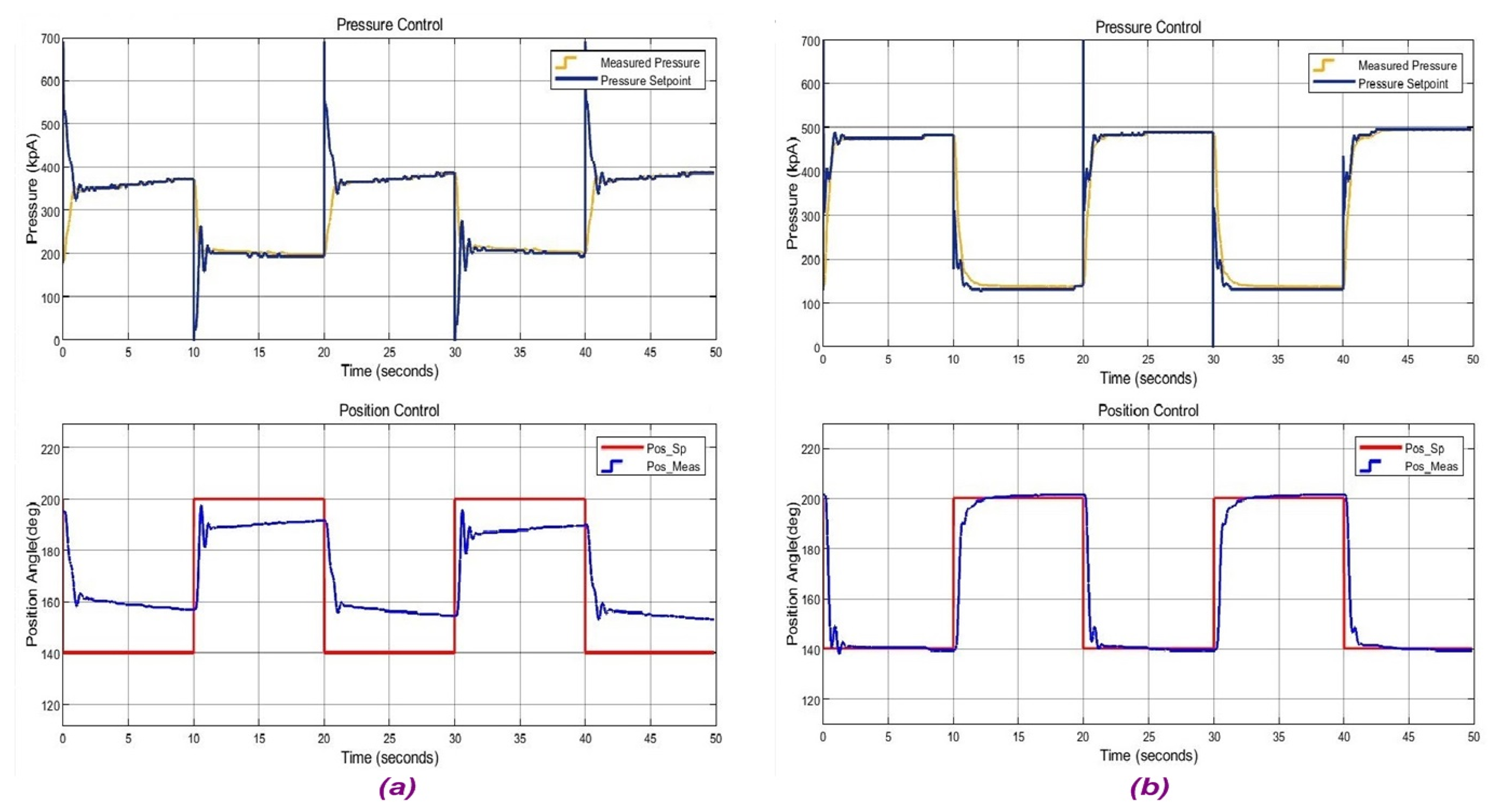
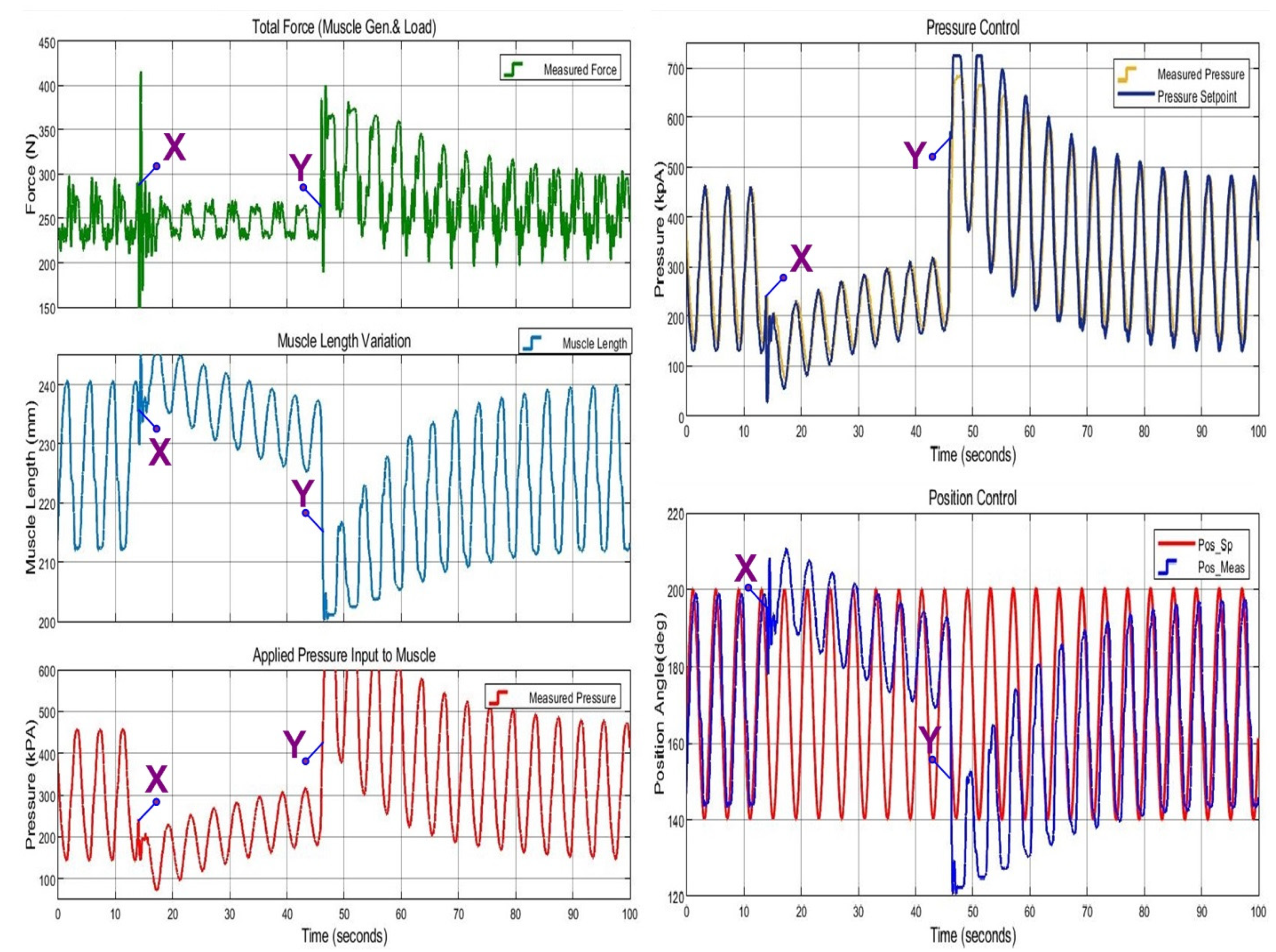
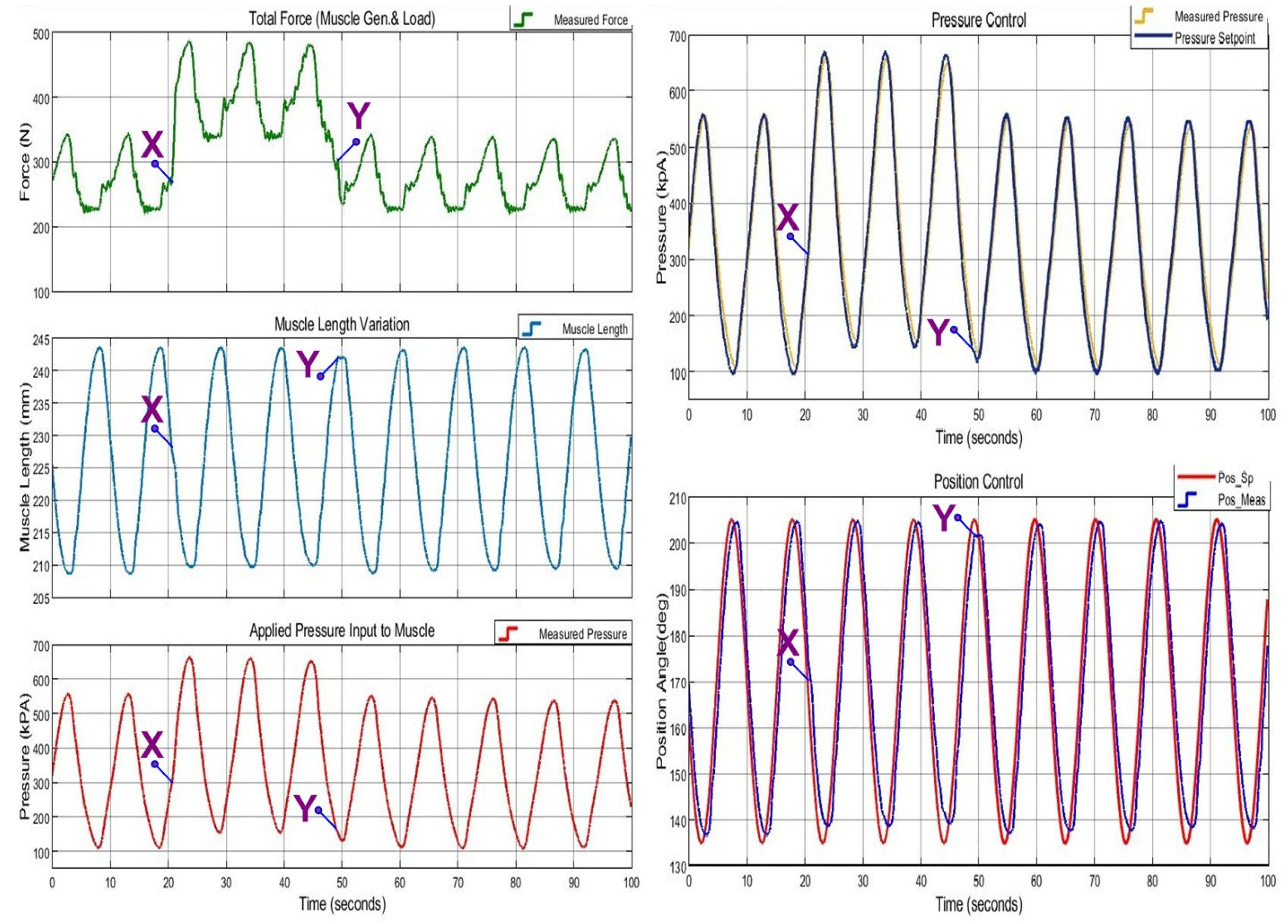
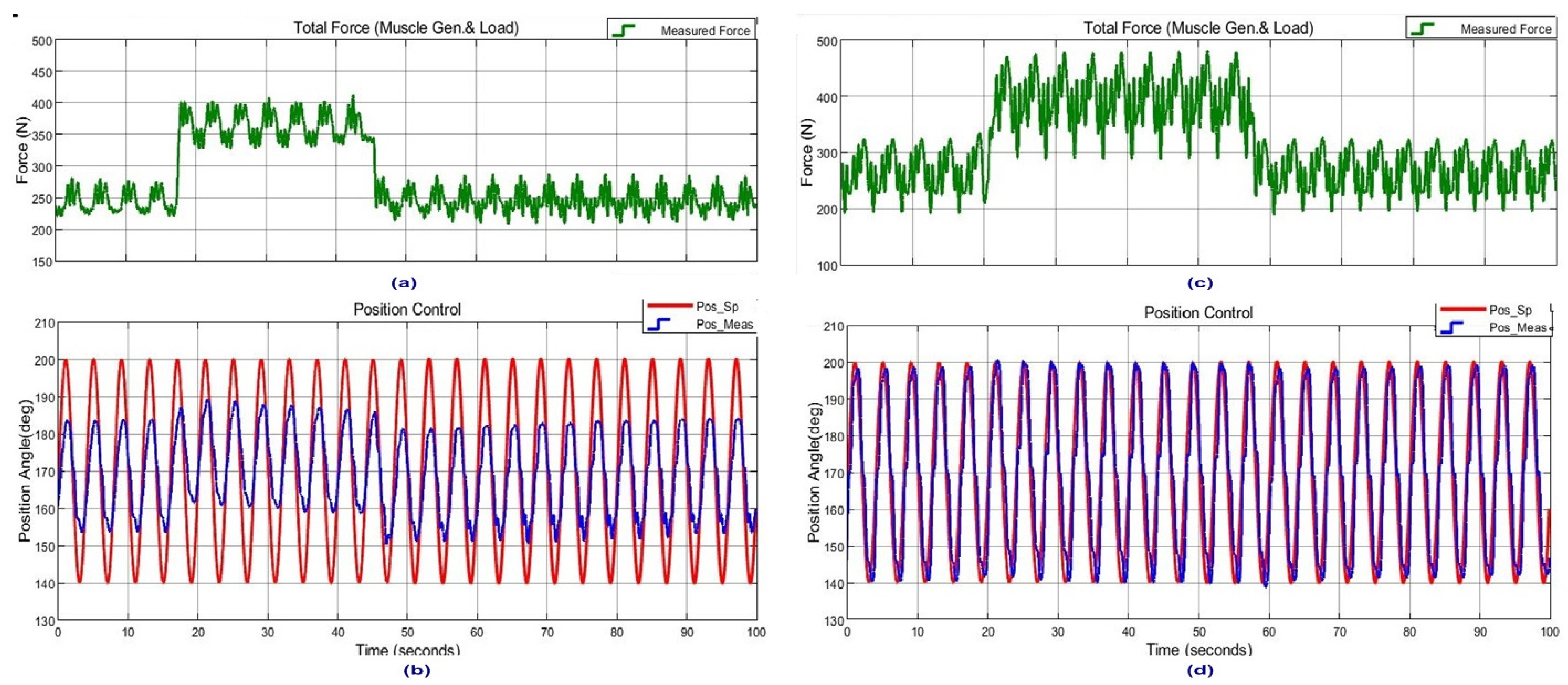
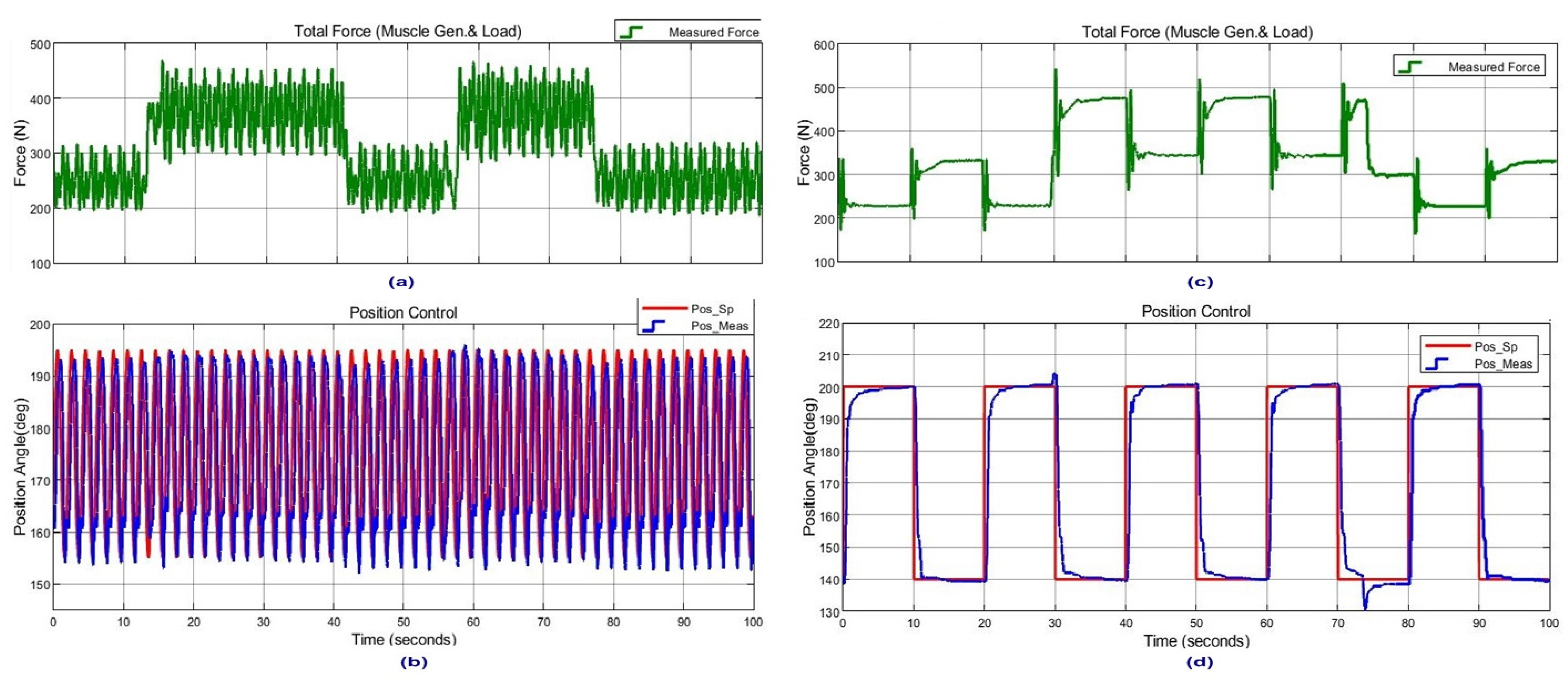
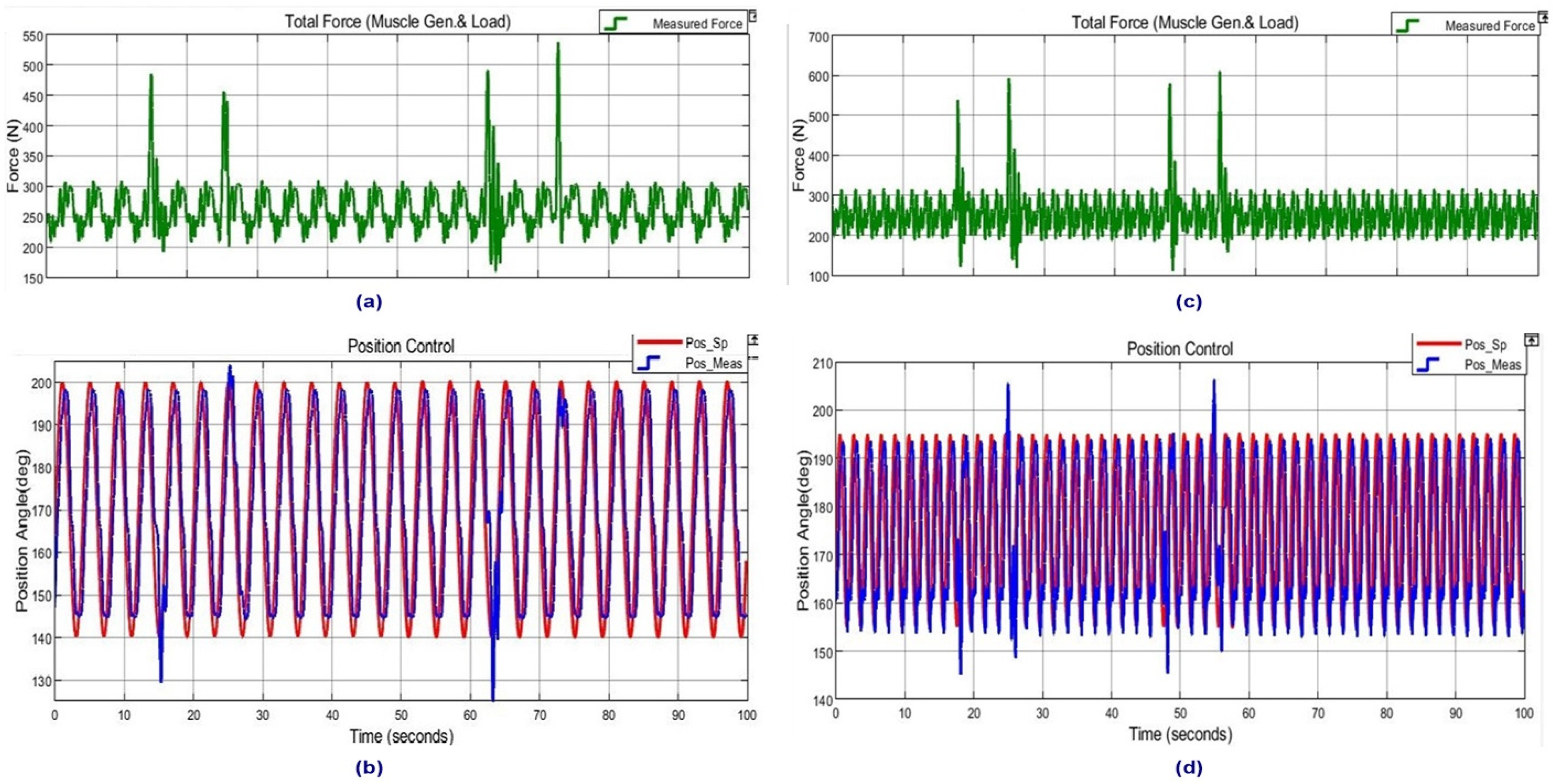
39], NARX-based inverse modeling uses joint angles and end effector contact force as the inputs, valve voltages as outputs, in order to model the complete robotic mechanism. However, this work models the inverse dynamics of PAM itself by taking muscle dynamic length and muscle force as the inputs and muscle pressure as the output, which is independent of the application mechanism. By this means, inverse PAM modeling could be transported to the control applications of different mechanisms. The ROM performance of previous works was limited to approximately 20°.Conversely, this work reached up to 70° ROM with compliance to external disturbances. In addition, the steady-state position error for step response is in the range of −0.52–+1.62°, which is quite acceptable in 60–70° ROM. On the other hand, for sinusoidal trajectories, a higher values of position errors are observed for 0.1 Hz, 0.25 Hz and 0.5 Hz, in the range of−5.5–+3.5°, which is also quite acceptable in 60–70° ROM.
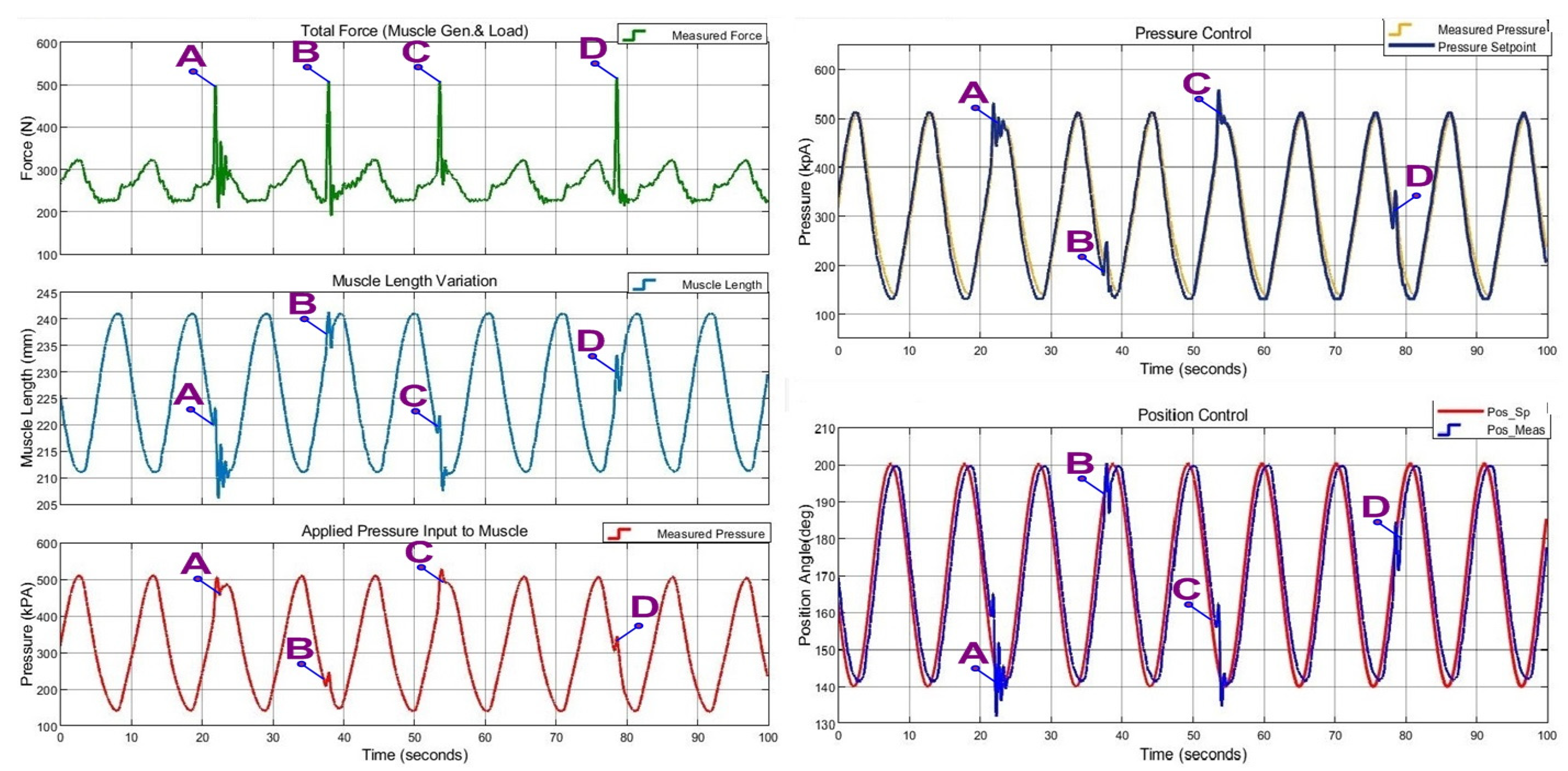
Implementation results demonstrated the efficacy of the novel control system in terms of compliant operation for dynamic external load variations as well as stable operation in case of impulsive disturbances. BIBO-type stable performances of the designed system are also observed. The aims for better compliance to external forces’ variations and estimation of PAM dynamic behavior being independent of application mechanism have been reached. The controller performance videos for compliant operation are presented in
supplementary materials.
On the other hand, it could not reach larger ROM higher than 70° due to limitations from the testbed hardware structure. This issue could be resolved in the actual rehabilitation device mechanism design stage.
To conclude, a simple but efficient control method is illustrated to facilitate the common use of PAM in low-cost rehabilitation devices.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}