
Research on Trajectory Tracking of Sliding Mode Control Based on Adaptive Preview Time


Abstract
:1. Introduction
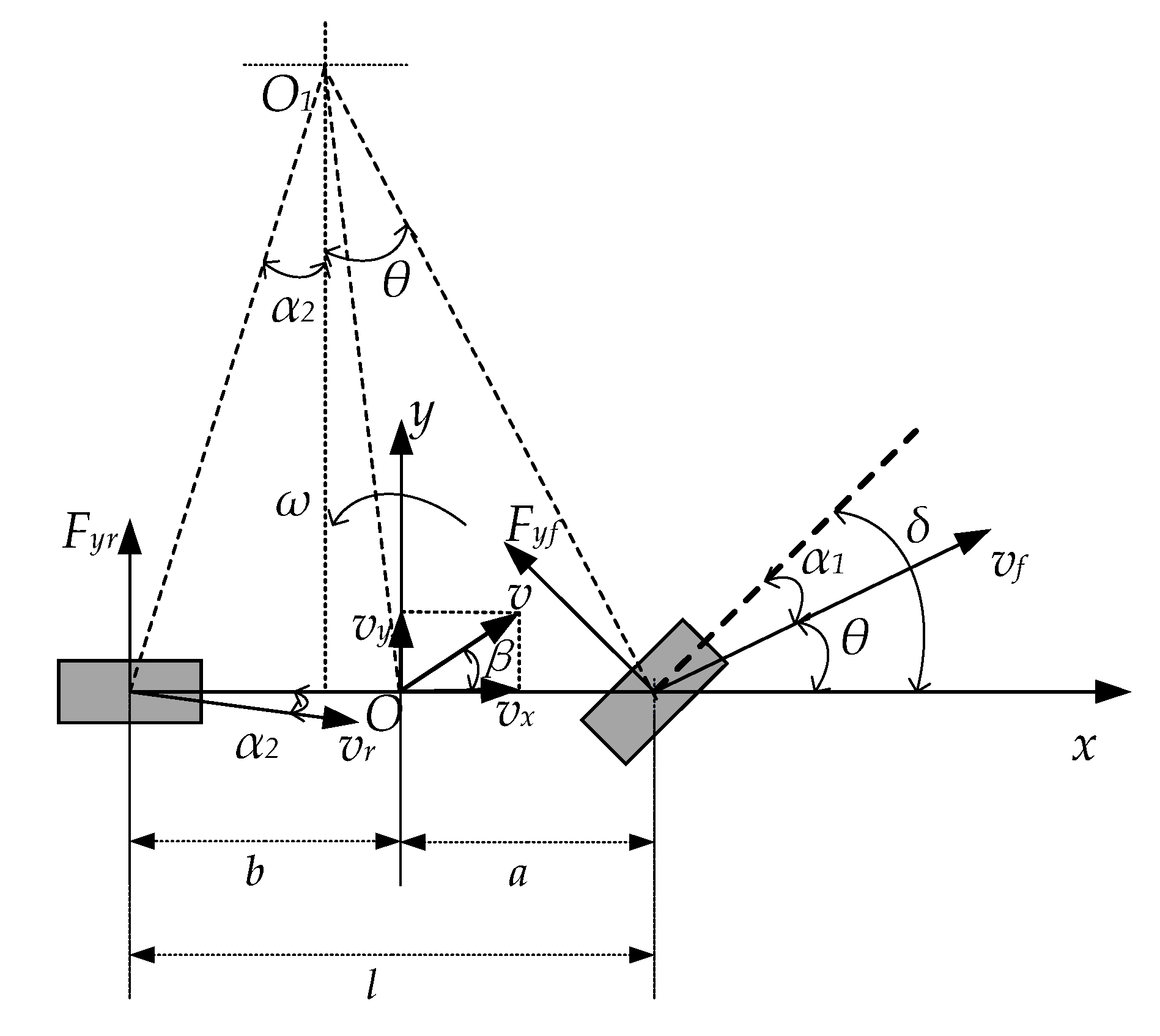
2. Vehicle Dynamics Model
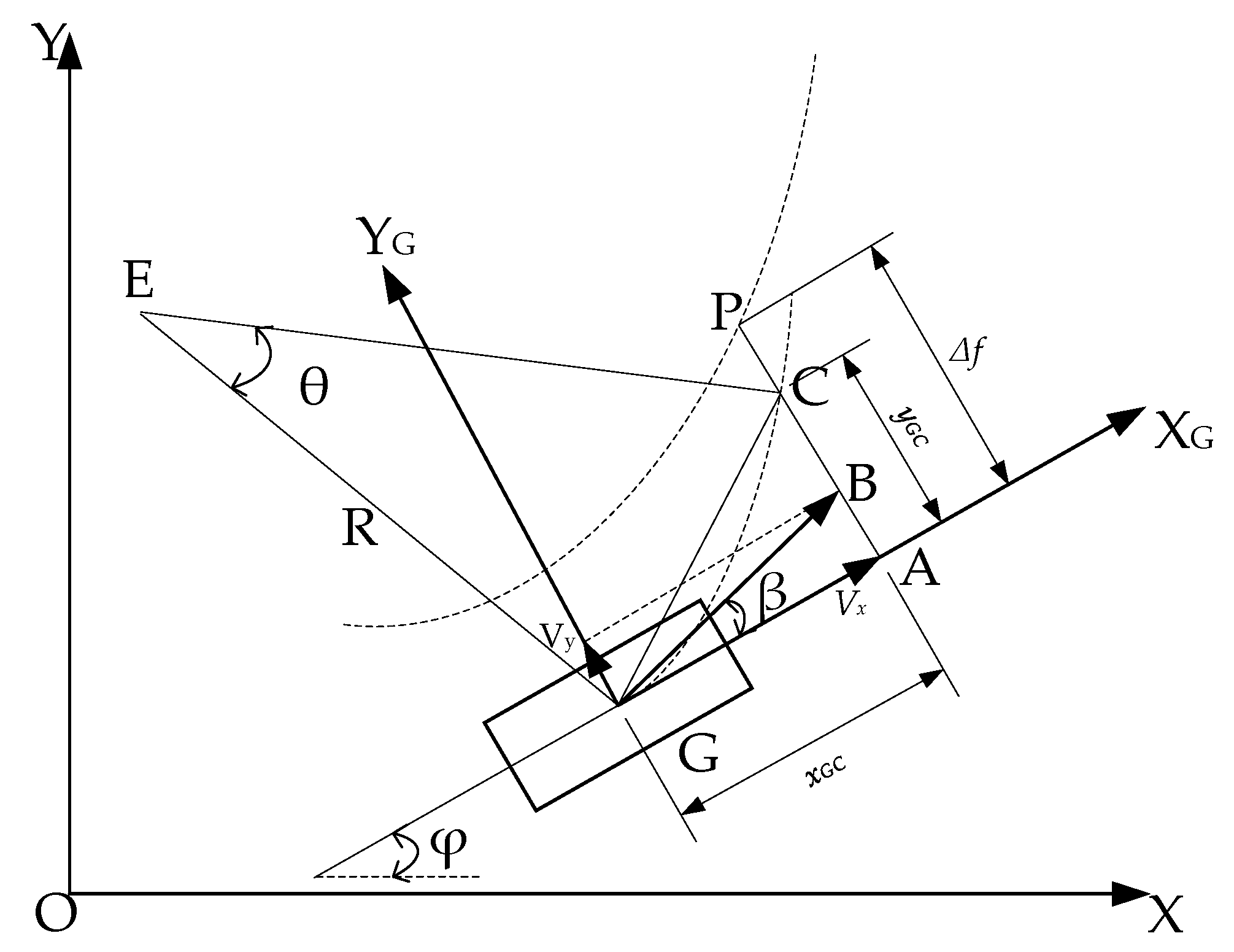
3. Adaptive Preview Model
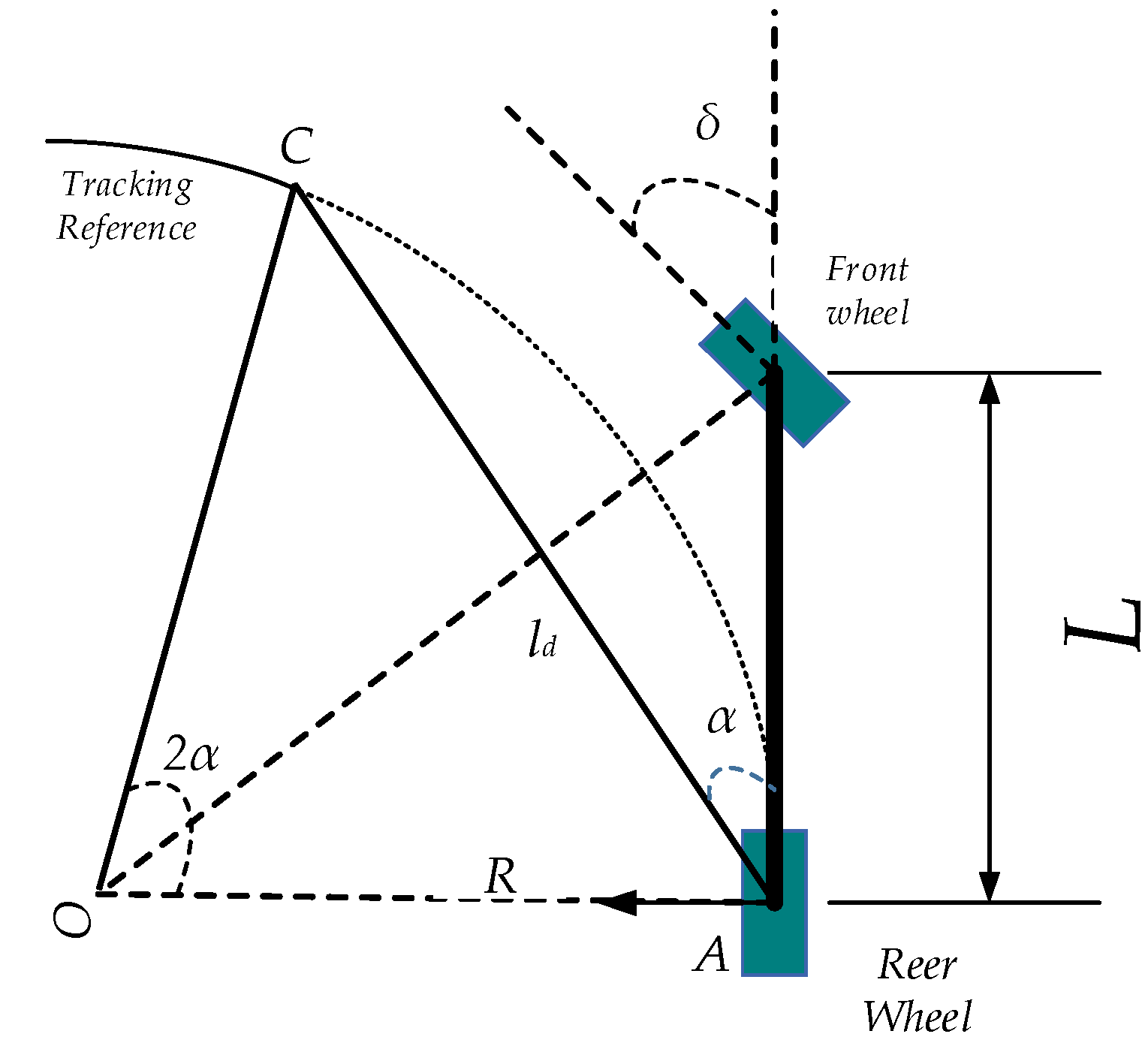
3.1. Optimal Curvature Single Point Preview
3.2. Adaptive Preview Time
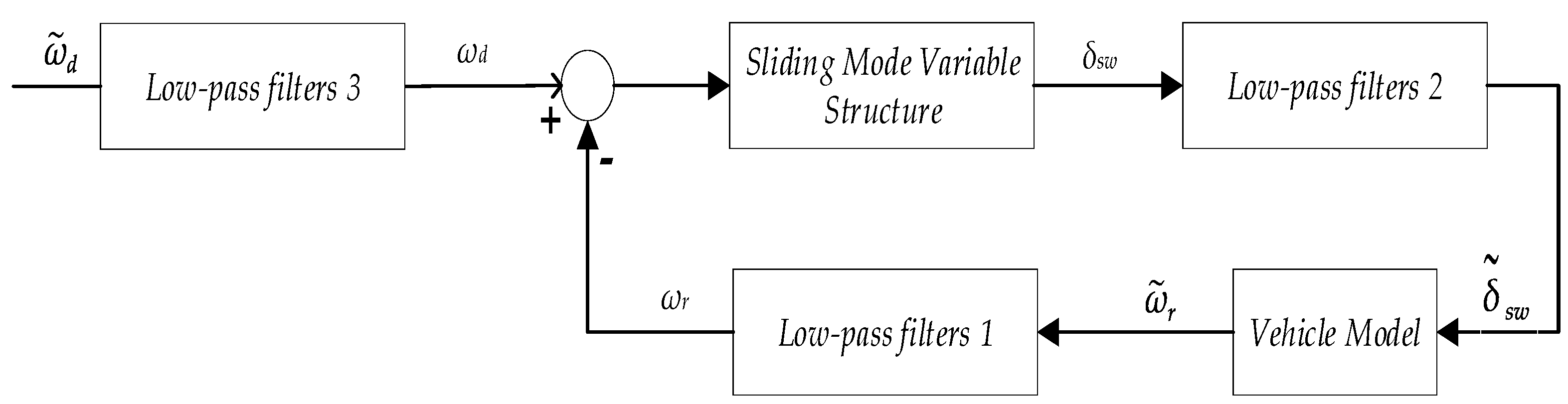
4. Design of Sliding Mode Controller
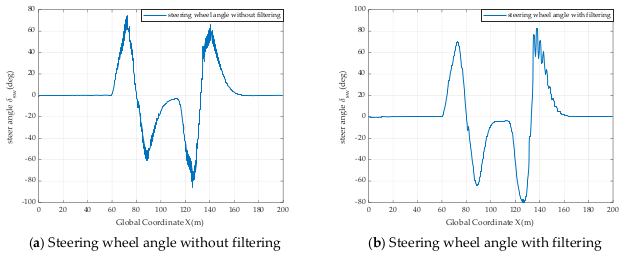
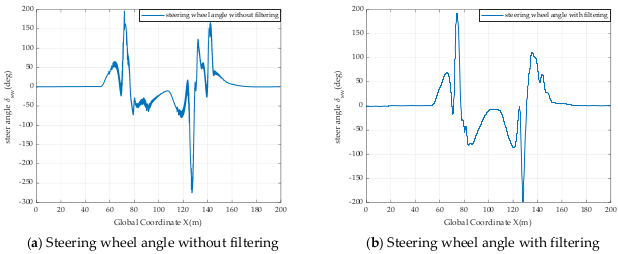
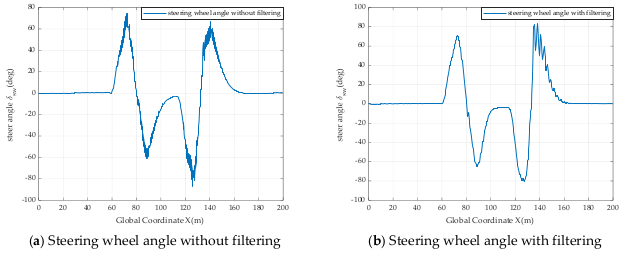
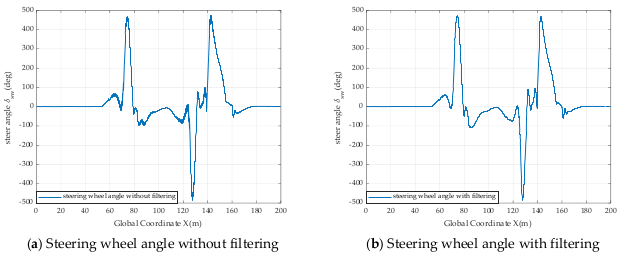
4.1. Design of Low-Pass Filters
4.2. Design of Sliding Mode Control Law
5. Sliding Mode Control System Simulation Verification
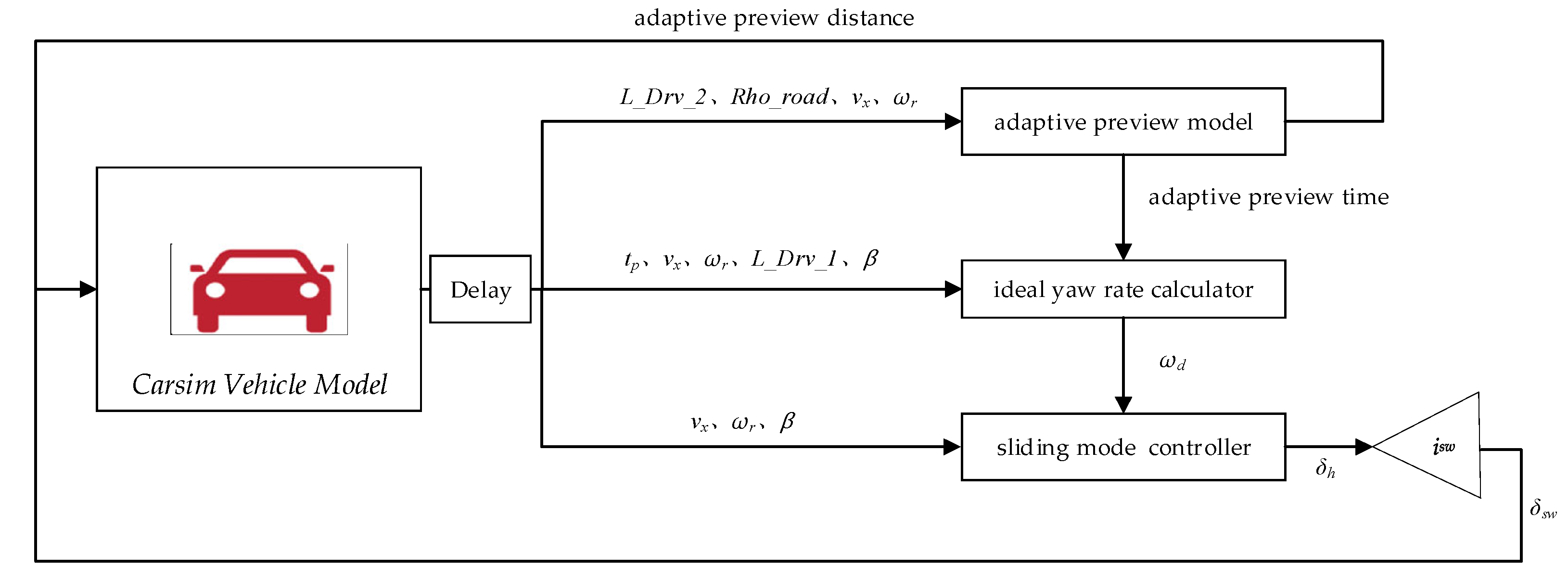
5.1. Construction of Joint Simulation Platform
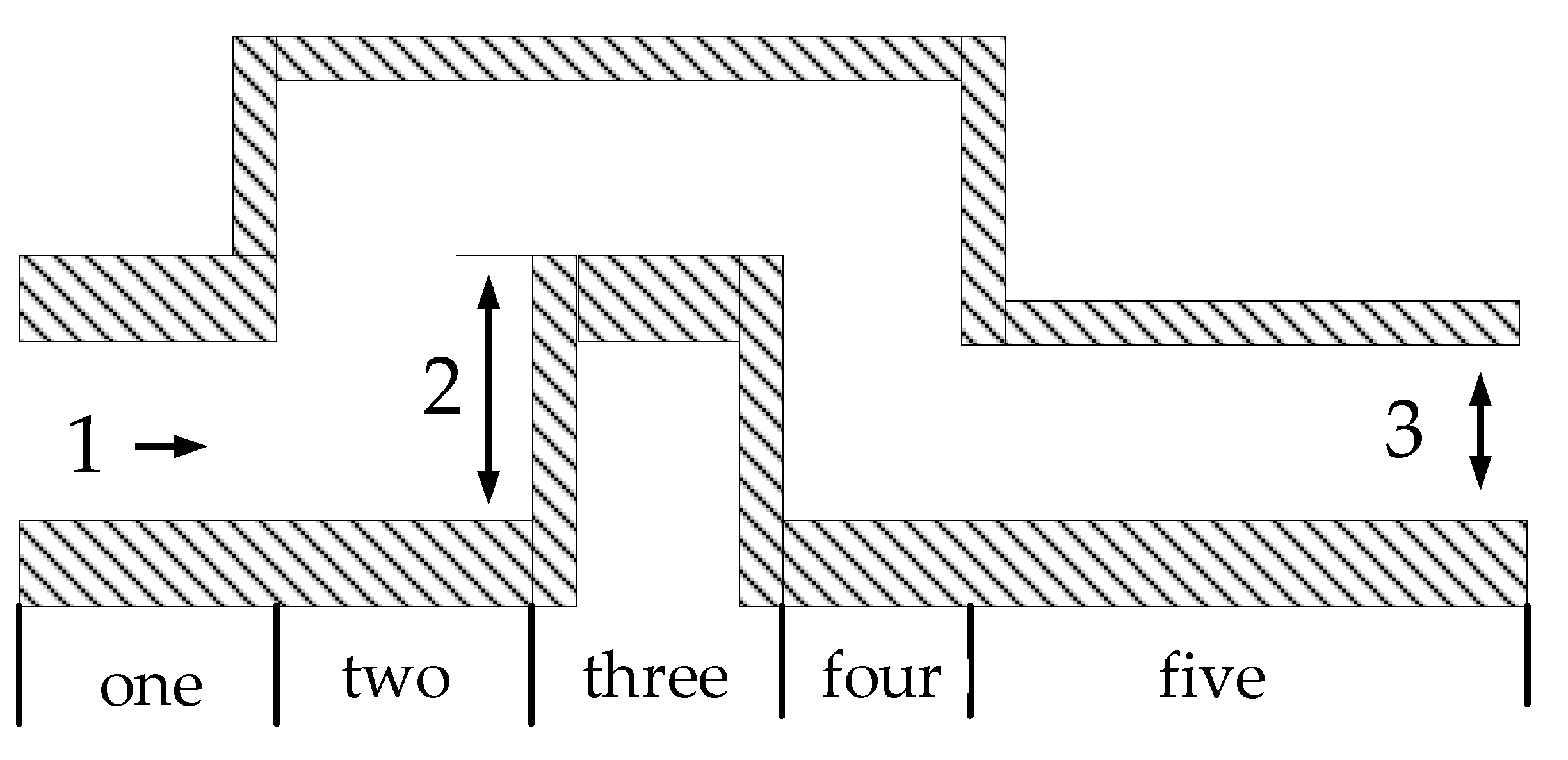
5.2. Double Shift Road Path Planning
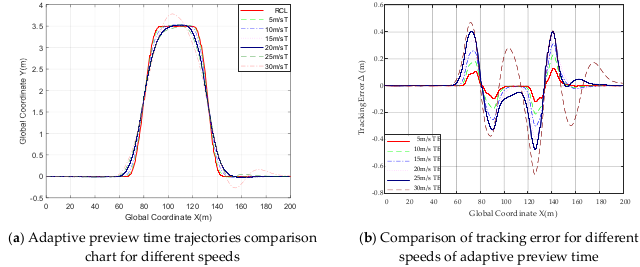
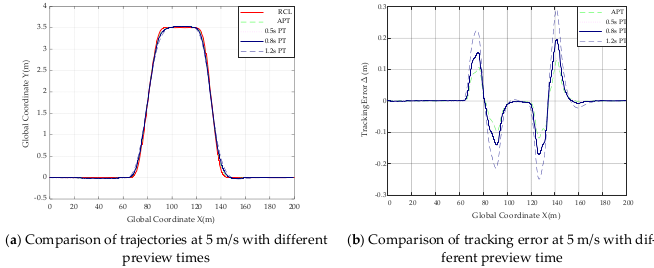
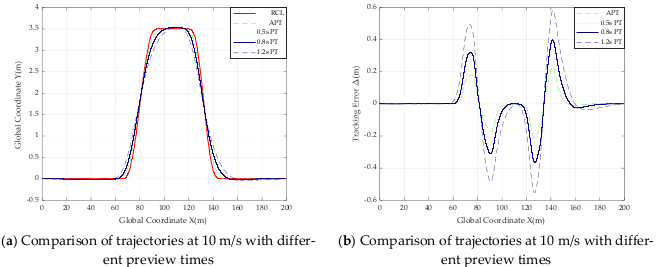
5.3. Simulation Verification of Double-Shifted Line Working Condition
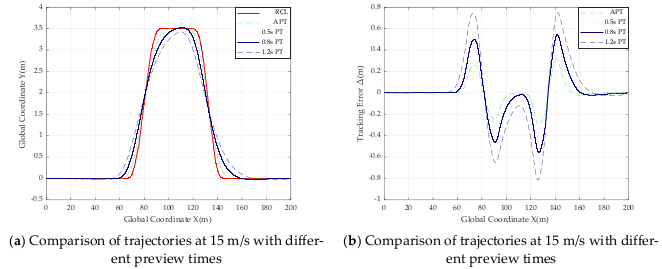
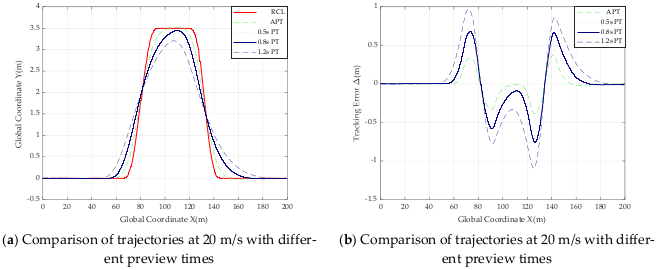
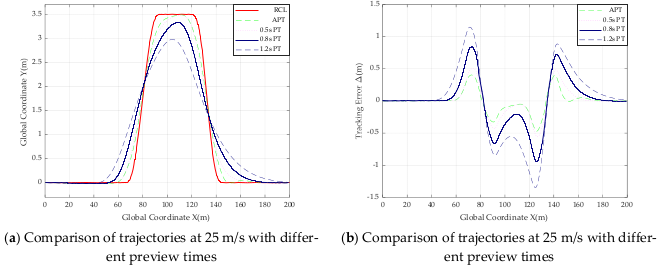
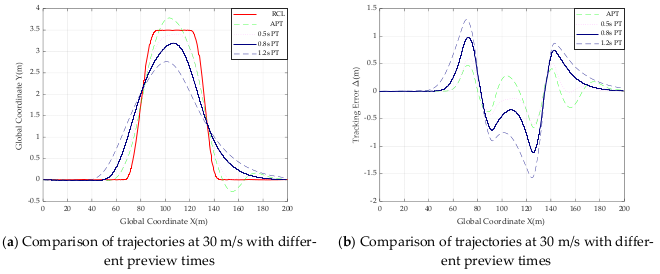
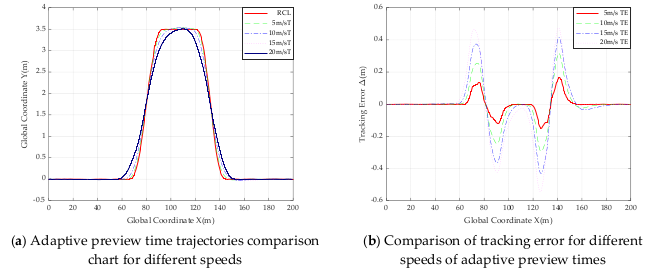
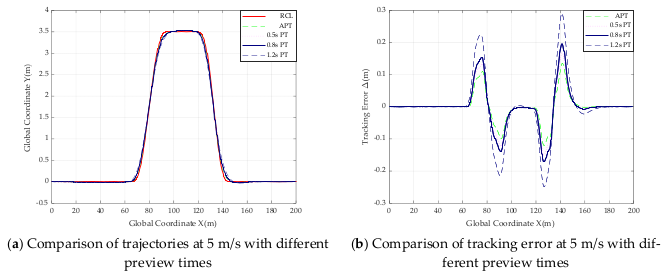
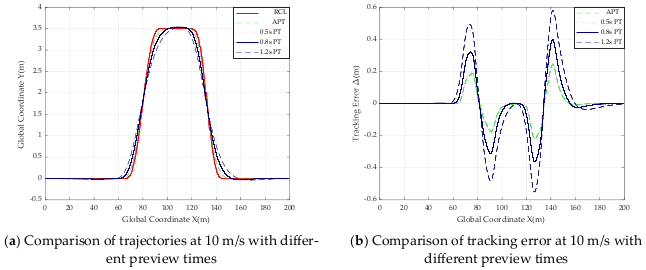
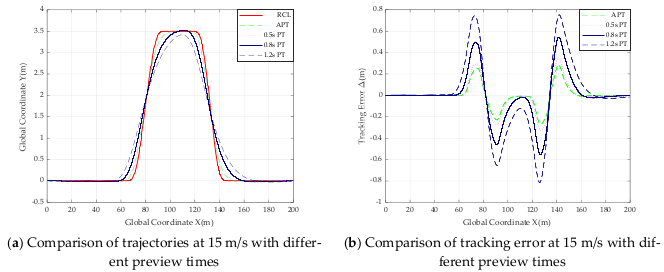
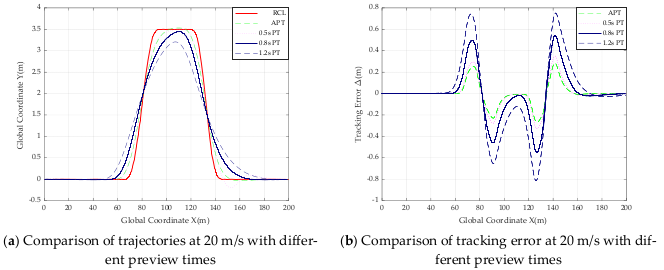
5.3.1. Double-Shifted Working Condition under High Adhesion Coefficient Pavement
5.3.2. Double-Shifted Working Condition under Low Adhesion Coefficient Pavement
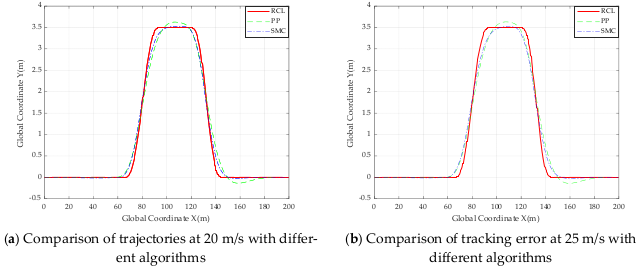
5.3.3. Comparative Simulation Experiments with Another Typical Algorithm
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cai, G.; Liu, H.; Feng, J.; Xu, L.; Yin, G. Review on the research of motion planning and control for intelligent vehicles. J. Automot. Saf. Energy 2021, 12, 279–297. [Google Scholar]
- Xu, Y.; Tang, W.; Chen, B.; Qiu, L.; Yang, R. A Model Predictive Control with Preview-Follower Theory Algorithm for Trajectory Tracking Control in Autonomous Vehicles. Symmetry 2021, 13, 381. [Google Scholar] [CrossRef]
- Li, Z.; Wang, P.; Liu, H.; Hu, Y.; Chen, H. Coordinated Longitudinal and Lateral Vehicle Stability Control Based on the Combined-Slip Tire Model in the MPC Framework. Mech. Syst. Signal Process. 2021, 161, 107947. [Google Scholar] [CrossRef]
- Loof, J.; Besselink, I.; Nijmeijer, H. Automated Lane Changing with a Controlled Steering-Wheel Feedback Torque for Low Lateral Acceleration Purposes. IEEE Trans. Intell. Veh. 2019, 4, 578–587. [Google Scholar] [CrossRef]
- Yang, T.; Bai, Z.; Li, Z.; Feng, N.; Chen, L. Intelligent Vehicle Lateral Control Method Based on Feedforward+ Predictive LQR Algorithm. Actuators 2021, 10, 228. [Google Scholar] [CrossRef]
- Rao, L.G.; Narayanan, S. Optimal Response of Half Car Vehicle Model with Sky-Hook Damper Based on LQR Control. Int. J. Dyn. Control. 2020, 8, 488–496. [Google Scholar]
- Hang, P.; Xia, X.; Chen, X. Handling Stability Advancement With 4WS and DYC Coordinated Control: A Gain-Scheduled Robust Control Approach. IEEE Trans. Veh. Technol. 2021, 70, 3164–3174. [Google Scholar] [CrossRef]
- Zhang, S.; Zhao, X.; Zhu, G.; Shi, P.; Hao, Y.; Kong, L. Adaptive Trajectory Tracking Control Strategy of Intelligent Vehicle. Int. J. Distrib. Sens. Netw. 2020, 16, 155014772091698. [Google Scholar] [CrossRef]
- Wu, H.; Si, Z.; Li, Z. Trajectory Tracking Control for Four-Wheel Independent Drive Intelligent Vehicle Based on Model Predictive Control. IEEE Access 2020, 8, 73071–73081. [Google Scholar] [CrossRef]
- Shen, C.; Shi, Y. Distributed Implementation of Nonlinear Model Predictive Control for AUV Trajectory Tracking. Automatica 2020, 115, 108863. [Google Scholar] [CrossRef]
- Zhang, Y.; Xia, Y.; Cheng, H.; Huang, L.; Zhao, F.; Lv, L. Research on Lateral Control of Intelligent Vehicle Path Tracking. J. Chongqing Inst. Technol. 2021, 35, 53–61. [Google Scholar]
- Hu, J.; Xiong, S.; Zha, J.; Fu, C. Lane Detection and Trajectory Tracking Control of Autonomous Vehicle Based on Model Predictive Control. Int. J. Automot. Technol. 2020, 21, 285–295. [Google Scholar] [CrossRef]
- Alika, R.; Mellouli, E.M.; Tissir, E.H. Optimization of Higher-Order Sliding Mode Control Parameter Using Particle Swarm Optimization for Lateral Dynamics of Autonomous Vehicles. In Proceedings of the 2020 1st International Conference on Innovative Research in Applied Science, Engineering and Technology (IRASET), Meknes, Morocco, 16–19 April 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Liu, W.; Wang, R.; Xie, C.; Ye, Q. Investigation on Adaptive Preview Distance Path Tracking Control with Directional Error Compensation. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2020, 234, 484–500. [Google Scholar] [CrossRef]
- Zhang, J.; Zhou, S.; Shi, Z.; Zhao, J.; Zhu, B. Path planning and tracking control for corner overtaking of driverless vehicle using sliding mode technique with conditional integrators. Control. Theory Appl. 2021, 38, 197–205. [Google Scholar]
- Zhang, P.; Yang, Z.; Zhao, X.; Yao, L.; Zhang, S. Backward Path Tracking for Tractor-Semitrailer System Based on Sliding Model Control. Agric. Eng. 2021, 11, 103–107. [Google Scholar]
- Hui, Y. Research on Neural-Network Adaptive Sliding Mode Control of Longitudinal Dynamic Behavior of Intelligent Vehicle. Master Thesis, Jiangsu University, Zhenjiang, China, 2020. [Google Scholar]
- Du, H.; Man, Z.; Zheng, J.; Cricenti, A.; Zhao, Y.; Xu, Z.; Wang, H. Robust Control for Vehicle Lane-Keeping with Sliding Mode. In Proceedings of the 2017 11th Asian Control Conference (ASCC), Gold Coast, Australia, 17–20 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 84–89. [Google Scholar]
- Lin, F.; Sun, M.; Wu, J.; Qian, C. Path Tracking Control of Autonomous Vehicle Based on Nonlinear Tire Model. Actuators 2021, 10, 242. [Google Scholar] [CrossRef]
- Chen, W.; Tan, D.; Wang, H.; Wang, J.; Xia, G. A class of driver directional control model based on trajectory prediction. J. Mech. Eng. 2016, 52, 106–115. [Google Scholar] [CrossRef]
- Jin, X.; Zhang, J.; Liu, Y.; Wang, Q. Research on adaptive optimal preview model based on Stanley algorithm. Comput. Eng. 2018, 44, 42–46. [Google Scholar]
- Li, H. Optimal Preview Control Driver Model with Adaptive Preview Time. JME 2010, 46, 106. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Li, Z.; Cai, J.; Fu, Y. Sliding Mode Control for Digital Hydraulic Cylinder Servo Systems Based on Low Pass Filter. Chin. Hydraul. Pneum. 2014, 12, 72–74. [Google Scholar]
- Zhao, L.; Wang, S.; Wang, H. LDF-based sliding mode control for robots. Comput. Eng. Appl. 2009, 45, 236–238. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Unit |
|---|---|---|
| T | 0.5 (coefficient road adhesion is 0.9) | s |
| 0.7 (coefficient road adhesion is 0.5) | s | |
| λ | 60 | - |
| η | 10 | - |
| Φ1 | 300 | - |
| Φ2 | 200 | - |
| ξ | 1800 | - |
| Parameters | Import/Export Channels | Unit |
|---|---|---|
| Lead distance to drive model path | IMP_LX_SEN_1 | m |
| Steering wheel angle | IMP_STEER_SW | deg |
| Lateral distance to target preview point 2 | L_Drv_2 | m |
| Longitudinal speed | Vx_SM | km/h |
| Yaw rate of vehicle | AV_Y | deg/s |
| Slip angle of vehicle | Beta | deg |
| Lateral distance to target preview point 1 | L_Drv_1 | m |
| Parameters | Value | Unit |
|---|---|---|
| m | 1820 | kg |
| Iz | 1523 | kg·m−2 |
| Cf | 108,861 | N·rad−1 |
| Cr | 108,861 | N·rad−1 |
| isw | 19.562 | - |
| X (m) | Y (m) | Station (m) | X (m) | Y (m) | Station (m) |
|---|---|---|---|---|---|
| 0 | 0 | 0 | 95 | 3.4 | 90.291 |
| 65 | 0 | 65 | 120 | 3.4 | 95.292 |
| 70 | 0.1 | 70.001 | 125 | 3.3 | 125.296 |
| 75 | 0.7 | 75.037 | 130 | 2.4 | 130.377 |
| 80 | 1.8 | 80.156 | 135 | 1.1 | 135.543 |
| 85 | 2.8 | 85.255 | 140 | 0.2 | 145.627 |
| 90 | 3.4 | 90.291 | 200 | 0 | 200.627 |
| Speed (m/s) | Adaptive Preview Time (m) | 0.5 s Preview Time (m) | 0.8 s Preview Time (m) | 1.2 s Preview Time (m) | ||||
|---|---|---|---|---|---|---|---|---|
| Maximum Offset | Minimum Offset | Maximum Offset | Minimum Offset | Maximum Offset | Minimum Offset | Maximum Offset | Minimum Offset | |
| 5 | 0.0307 | −0.0186 | 0.0307 | −0.0191 | 0.0302 | −0.0298 | 0.0354 | −0.0570 |
| 10 | 0.0296 | −0.0470 | 0.0296 | −0.0309 | 0.0350 | −0.1281 | 0.0310 | −0.2718 |
| 15 | 0.0294 | −0.0942 | 0.0278 | −0.1182 | 0.0170 | −0.2640 | −0.0815 | −0.4975 |
| 20 | 0.0242 | −0.1570 | 0.0152 | −0.2028 | −0.0540 | −0.4232 | −0.2942 | −0.8555 |
| 25 | −0.0154 | −0.2517 | −0.0172 | −0.2769 | −0.1719 | −0.6516 | −0.5247 | −1.1763 |
| 30 | 0.2825 | −0.4226 | −0.0937 | −0.4095 | −0.3068 | −0.8712 | −0.7394 | −1.4423 |
| Speed (m/s) | Adaptive Preview Time (m) | 0.5 s Preview Time (m) | 0.8 s Preview Time (m) | 1.2 s Preview Time (m) | ||||
|---|---|---|---|---|---|---|---|---|
| Maximum Offset | Minimum Offset | Maximum Offset | Minimum Offset | Maximum Offset | Minimum Offset | Maximum Offset | Minimum Offset | |
| 5 | 0.0307 | −0.0186 | 0.0307 | −0.0191 | 0.0302 | −0.0298 | 0.0354 | −0.0570 |
| 10 | 0.0296 | −0.0470 | 0.0296 | −0.0309 | 0.0350 | −0.1281 | 0.0310 | −0.2718 |
| 15 | 0.0294 | −0.0942 | 0.0278 | −0.1182 | 0.0170 | −0.2640 | −0.0815 | −0.4975 |
| 20 | 0.0242 | −0.1570 | 0.0152 | −0.2028 | −0.0540 | −0.4232 | −0.2942 | −0.8555 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, H.; Bei, S.; Zhao, Q.; Han, X.; Zhou, D.; Zhou, X.; Li, B. Research on Trajectory Tracking of Sliding Mode Control Based on Adaptive Preview Time. Actuators 2022, 11, 34. https://doi.org/10.3390/act11020034
Hu H, Bei S, Zhao Q, Han X, Zhou D, Zhou X, Li B. Research on Trajectory Tracking of Sliding Mode Control Based on Adaptive Preview Time. Actuators. 2022; 11(2):34. https://doi.org/10.3390/act11020034
Chicago/Turabian StyleHu, Hongzhen, Shaoyi Bei, Qixian Zhao, Xiao Han, Dan Zhou, Xinye Zhou, and Bo Li. 2022. "Research on Trajectory Tracking of Sliding Mode Control Based on Adaptive Preview Time" Actuators 11, no. 2: 34. https://doi.org/10.3390/act11020034
APA StyleHu, H., Bei, S., Zhao, Q., Han, X., Zhou, D., Zhou, X., & Li, B. (2022). Research on Trajectory Tracking of Sliding Mode Control Based on Adaptive Preview Time. Actuators, 11(2), 34. https://doi.org/10.3390/act11020034