3.1. Theoretical Modeling and Simulation
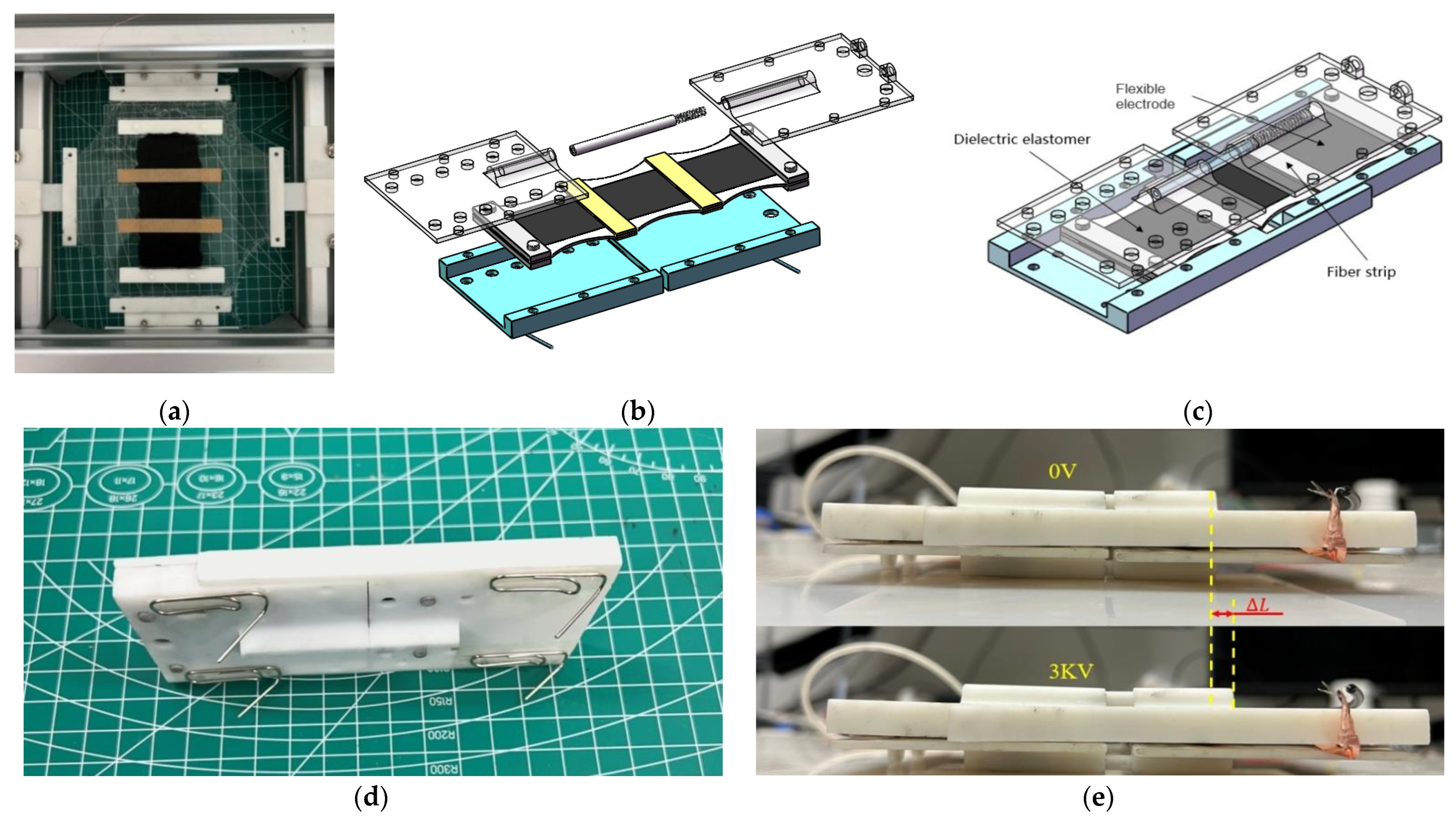
In the process of theoretical modeling, because the individual width of the rigid fibers is one-eighth of that of the dielectric elastomer membrane, the effect on the deformation of the DE membrane is relatively small. The sum of the overall mass of the rigid fibers does not exceed 0.6 g. Therefore, its effect on the deformation of the dielectric elastomer membrane can be ignored in the theoretical model.
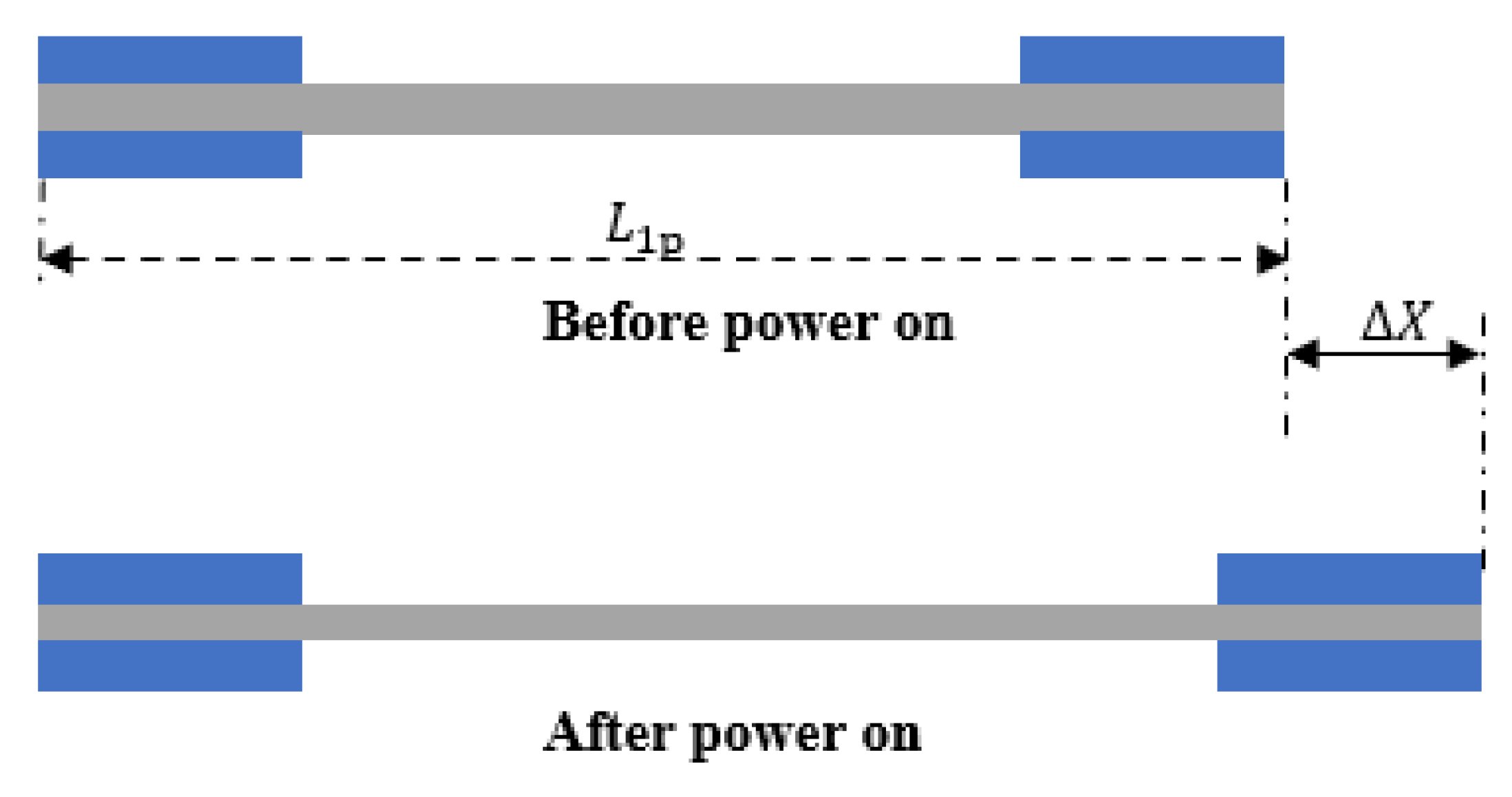
Figure 2 shows a sketch of the dielectric elastomer actuator, where the upper part shows the resting state of the actuator and the lower part shows the actuated state after the actuator is energized. In the stationary state, the overall actuator displacement is nil because the restoring force of the spring for the membrane is equal to the contraction force of the membrane.
After being energized, the top and bottom of the dielectric elastomer membrane undergo deformation due to the voltage. The change in width of the membrane can be simplified to nil because of the support of the PMMA fibers. Due to the incompressibility of the DE membrane, the tensile ratio of the membrane in the length direction
and the displacement
of the film can be expressed by the following function:
. Since the dielectric elastomer membrane is a soft material, the fluid model can be introduced to describe the effect of adhesion on the material. Assuming that the deformation of the membrane conforms to the ideal model, the electrostatic energy of the DE membrane is expressed as follows:
. In the next calculation, the electric field strength
after electrification can be used to replace the potential displacement, and the free energy density of the dielectric elastomer can be expressed as a function of
(
i = 1, 2):
Here, the total volume of the dielectric elastomer is multiplied by the free energy density to obtain the overall potential energy of the membrane
The overall potential energy of the entire membrane includes both the potential energy of the DE membrane and the external spring potential energy, which can be expressed as the spring potential energy with displacement
x in the equation
. The relationship with
can be obtained through the shape variable
x generated by the DE membrane, so
can be expressed as a function about
. Define the Lagrange of the system as:
To simplify the calculation, this paper uses the Rayleigh function to represent the Newtonian fluid damping
, with Equation (1) for three parameters
, respectively, to find the partial derivative. We finally obtain:
Equation (3) is the core equation of the dielectric elastomer actuator, and the relationship between the elongation x of the dielectric elastomer actuator, the voltage U applied to the dielectric elastomer membrane, and the time t can be calculated by software such as CLION.
A new interpolation fit estimation algorithm (IFEA) was constructed, with the focus of the algorithm clustered around a cubic difference fit and the calculation of elongation at suitable voltages. For these two problems, the algorithm in this paper mainly uses two for loops, one of which is applied to perform multiple fitting calculations and the other to estimate the elongation at different voltages in units of 1 V. After the estimation was completed, the predicted data were stored. The stored data were then fitted using the regression function. The final fitting function pseudo-code is shown in Algorithm 1. The results after the operation are shown in
Figure 3a.
| Algorithm 1: IFEA algorithm based on cyclic domain adaptation |
| Input | The voltage value U in the target, the length, width, and height data of the membrane , |
| Output | Estimated value of displacement |
| For | Calculate the volume V and free energy W of the membrane |
| | |
| | |
| | Calculate damping |
| | |
| | Calculate the l function |
| | |
| | Estimation of the output of the displacement x |
| | Add random factor |
| |
|
| End for | |
| For | Multiple difference fitting of the calculated parameters
|
| If | The square root of is not equal to the smallest |
| | Continue |
| End if | |
| End for | |
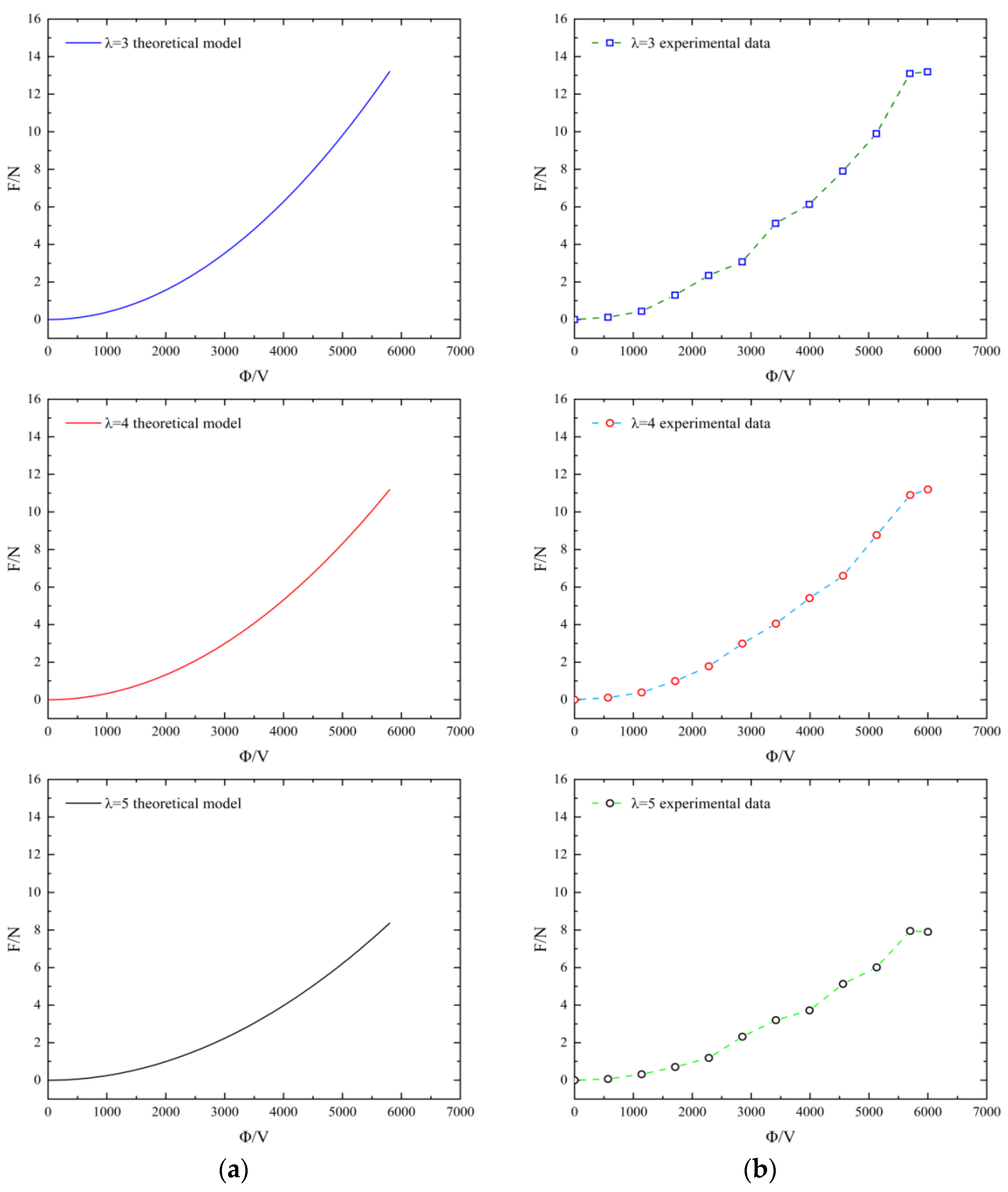
In order to determine the effect of different longitudinal (direction of DE membrane motion) pre-stretching on elongation, this paper designed several experiments under different pre-stretching conditions, with the experimental group using a pre-stretching rate of λ = 3 and the control group using stretching rates of λ = 4 and 5.
Figure 3 shows the predicted and experimental results compared under different longitudinal stretching and voltages. The data show that the experimental results and the simulated results basically match, and from
Figure 3b it can be seen that the smaller the stretching rate, the better was its elongation performance under the same voltage. Therefore, we choose the tensile rate λ = 3 for the subsequent experiments.
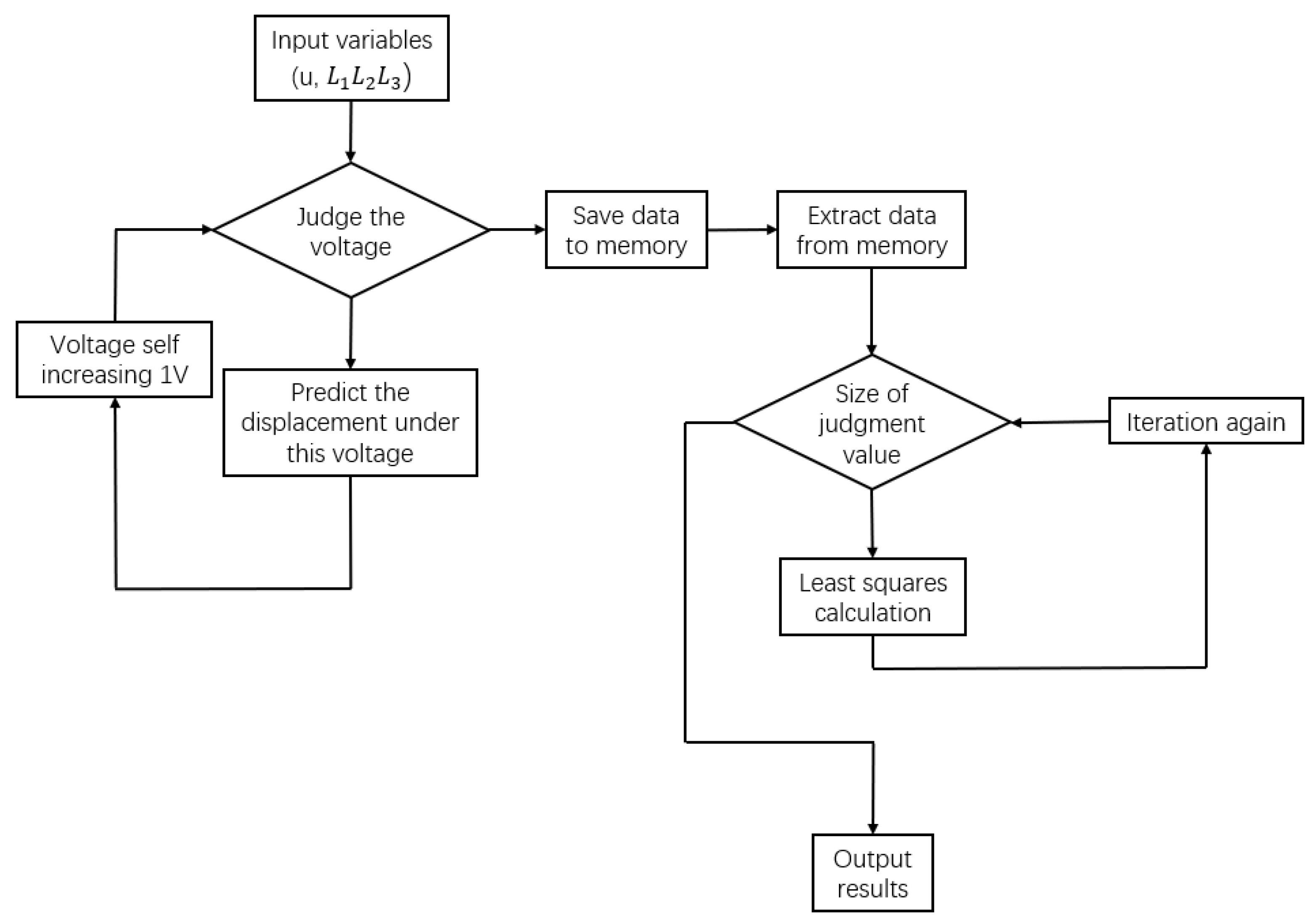
As shown in
Figure 4, the algorithm uses the loop twice to solve the function. The first calculation was carried out by converting the DE membrane formulae derived in the article into computer language and then predicting the elongation of the membrane. First, data were input for the length, width, height, and voltage of the film. The volume of the film and the corresponding free energy were calculated. The displacement under the corresponding voltage was obtained by substituting the above data into Formula (3). Because the DE membrane was handmade, interferencefrom uncertain factors was likely, so the IFEA introduces the concept of random factors. The expression of random factors can more accurately simulate the elongation of the film under the interference of external factors. During the calculation, the program opens up a memory space in which the calculated data is temporarily stored.
The second loop is for solving the first result using least squares. The least squares method is a mathematical optimization technique. The theoretical formula adopted by the function is:
By sorting the equations, we can obtain the least square fitting polynomial:
The min in formula (4) is the value that the program needs to judge. If the calculated value is less than or equal to min, the program will judge that the calculation result is correct, and the judged value is the value output by the program. When the second loop starts to calculate, the data stored in the memory space is accessed.
From
Figure 3a, we can see that the result predicted by the program is a quadratic fitting curve. The simulation indicates that the actuator will have better performance when the film pre-stretching ratio is 3.
3.2. Crawling Performance
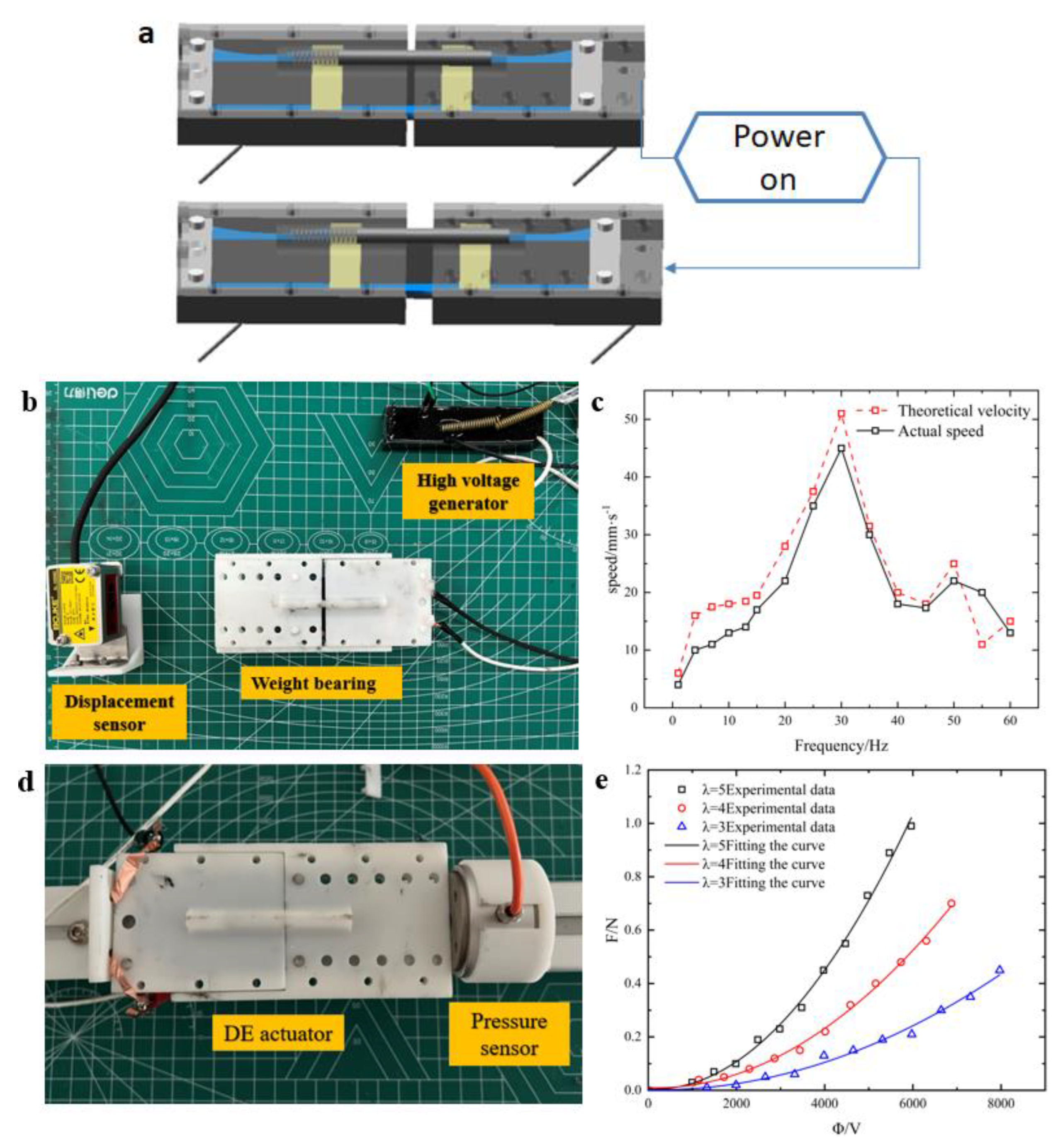
For the crawling actuator, its displacement within the specified time is an important indicator to measure the crawl performance. There are many factors that affect the moving speed of the actuator, principally the size, frequency, and duty cycle of the voltage. Therefore, this section tests the impact of these three factors on the performance of the crawling actuator. As shown in
Figure 5a, the DE membrane of the crawling actuator produces regular stretching deformation under the action of periodic voltage, and its deformation is transmitted to the ground through one-way friction feet, so that the crawling actuator can travel along the direction of stretching.
In this part of the study, the square wave was used as the input voltage, with the duty cycle selected as 50%. In order to prevent the breakdown of the DE membrane caused by high voltage, which can lead to significant deformation of the membrane, the voltage selected for this experiment was 4 kv. After applying periodic square wave voltage to the crawling actuator, due to the existence of unidirectional friction feet, the elongation of the DE membrane is converted into the driving force of the actuator. After displacement in a time period is completed, the theoretical crawling speed of the actuator is the displacement that the actuator advances multiplied by the voltage frequency in the period.
The experimental platform is shown in
Figure 5b. The crawling actuator was placed on a smooth board with a laser displacement sensor on the left side of the board to measure the displacement of the actuator within the specified time. The time was divided the time by the speed of the actuator, and the average value was calculated.
As shown in
Figure 5d, indicating the actual crawling speed of the actuator, the actual crawling speed was lower than the theoretical speed, the reason being that crawling involved friction loss and friction contact of the foot with the plate, and failed to convert fully the power provided by the actuator into forward force. In addition, the deviation between the theoretical speed and the actual speed of the actuator was larger at these points than when the frequency is high. The reason may be that in the larger frequency the elongation of the actuator was relatively small, so the performance of the one-way friction foot better played its role. When the elongation of the actuator at low frequency is large, the one-way friction foot may slip, so the difference between the theoretical and actual values at low frequency is greater than that at high frequencies.
In addition to the elongation at different voltages, the size of the driving force generated by the DE actuator is also an important indicator of a good or bad actuator.
Figure 5e shows the relationship between voltage and driving force for different lateral pre-stretch cases. After processing the data, it was found that the relationship between voltage and driving force is similar to that between voltage and displacement, where the driving force increases as the voltage loaded on the DE membrane increases, until after the voltage exceeds a certain limit value, the membrane is broken down and the driving force drops to zero. The experiment shows that the driving force of the actuator is the maximum resistance that the actuator can accept when moving forward. When the resistance of the actuator is less than its driving force, the actuator can move forward smoothly.
Unlike in the displacement test, the direction of the folds appearing in the driving force test was perpendicular to direction of movement of the DE membrane. The experimental data show that when the transverse pre-stretching rate became larger in the appropriate range, the performance of the actuator force not only improved, but we can see from the table below that a larger pre-stretching rate can increase the DE membrane resistance value and the membrane withstood higher voltage without being broken through. The membrane can withstand higher voltages without breakdown, but accordingly, the actuator force generated at the same voltage will be smaller.
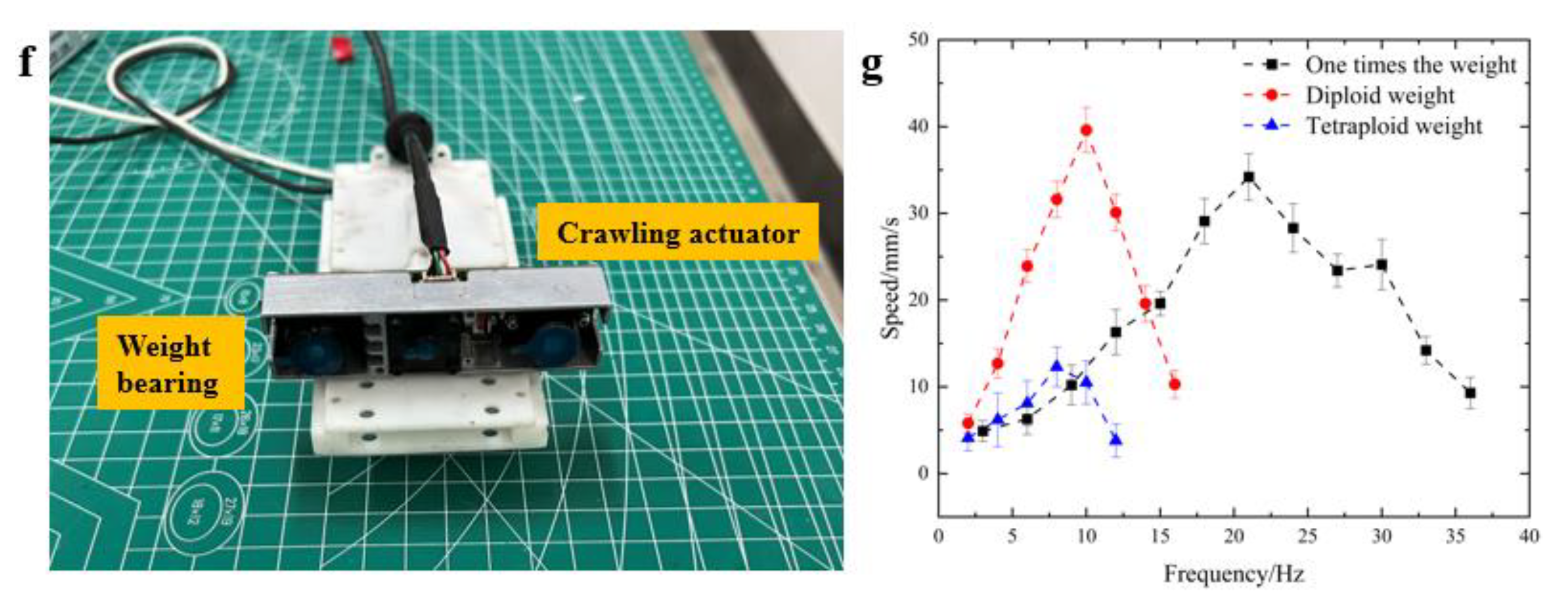
An important task of the actuator is to withstand the load, which is one of the important conditions to verify whether the actuator can meet the tasks of engineering. Therefore, the load experiment is also an important test. We added objects of different weights on top of the actuator, as shown in
Figure 5f. The objects were designed to simulate the usage scenarios that the actuator may be used in, and brought the total weight of the objects to about once, twice, and four times the overall weight of the actuator, respectively. Sensors were then employed to measure the distance travelled by the crawling actuator under each load. A graph was plotted from the data, as shown in
Figure 5g, for the different loads of the crawling actuator versus frequency.
The figure indicates the frequency corresponding to the maximum speed of the crawling actuator was different when the load was different, and the change rule is that the greater the load of the actuator, the smaller the frequency corresponding to the maximum speed. It also shows that the maximum crawl speed of the actuator under different loads was different; with the increase in load, the maximum speed of the actuator first increased and then decreased. The reason may be that when the load was small, the friction force on the friction foot was not fully converted into driving power to move forward, so when the load increased the grip of the friction foot was enhanced, and the actuator moved with a corresponding increase in speed; but when the load of the actuator exceeded the optimal value, the friction force between the friction foot and the contact surface increased to affect the forward motion, and the speed of the actuator dropped accordingly. In addition, the actuator described in this paper used a simple one-way friction foot made of a paper clip. When the total weight exceeded the stiffness of the paper clip itself, the paper clip was likely to bend, affecting the overall crawling performance of the actuator. A new one-way friction foot was fabricated by 3D printing, but this friction foot increased the contact area on the bottom compared with the paper-clip friction foot. Therefore, the crawling performance of the actuator was reduced, so the experiment finally used a one-way friction foot made of a paper clip as the support foot of the actuator.
3.3. Actuator Motion Improvement
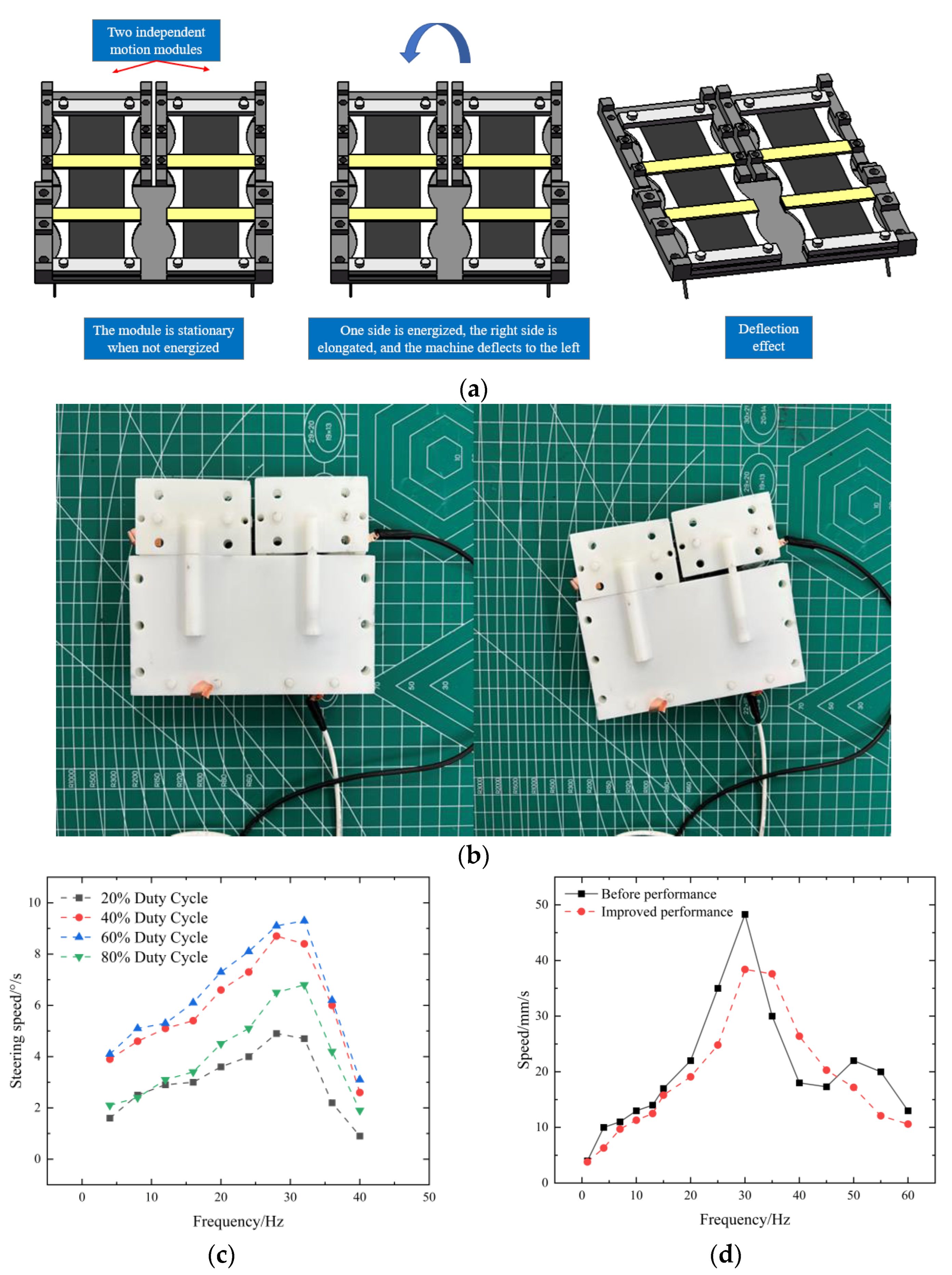
The soft-body actuator was designed in combination, as shown in
Figure 6a, the left and right side of the device is a DE actuator. When crawling, drive power on one side of actuator to produce the reciprocating motion does not occur on the other side, so that speed difference is generated between the left and right side of the actuator, and the actuator is deflected back to the non-energized side.
Figure 6b shows the actuator turning diagram; for measurement of the crawling actuator’s turning performance, the principal means is to pass a quantitative square-wave voltage and measure the angle of the crawling actuator turning in a specified time. Therefore, in this experiment, a 4 kv square wave was applied, where the high-value voltage was 4 kv, the low-value voltage 0, and the duration of both high and low values was 2 s. The actuator was allowed to turn 90°, and the time required for that turn was measured. Four sets of data were collected and averaged, and the turning speed was finally calculated.
After improving the crawling actuator and adding the steering function, the two independent actuators had a certain impact on the crawling ability of the actuator, so it was necessary to test the crawling performance of the actuator. The experimental results are shown in
Figure 6c. It can be seen from the figure that the influence of increasing duty cycle on cornering performance was nonlinear within the effective frequency range, where 60% of the duty cycle had a better effect.
It was necessary to test the crawling performance of the actuator in an experiment, the results of which are shown in
Figure 6d. This research showed that the frequency relative to the maximum speed of the improved actuator changed because the dielectric elastomer membrane changed, thus driving the overall change of the device, and the corresponding frequency also changed. At the same time, because the two sides of the DE membrane were handmade, slight differences are inevitable. Despite the parallel wire design, because of the difference in the tutor DE membrane under the same voltage to produce the elongation, the actuator does not crawl along a perfectly straight line, leading to a slight reduction in crawl performance. Because of the existence of the steering function, the actuator is much more flexible, so the slight decrease in performance is acceptable.
3.4. Fatigue Test of DE Membrane
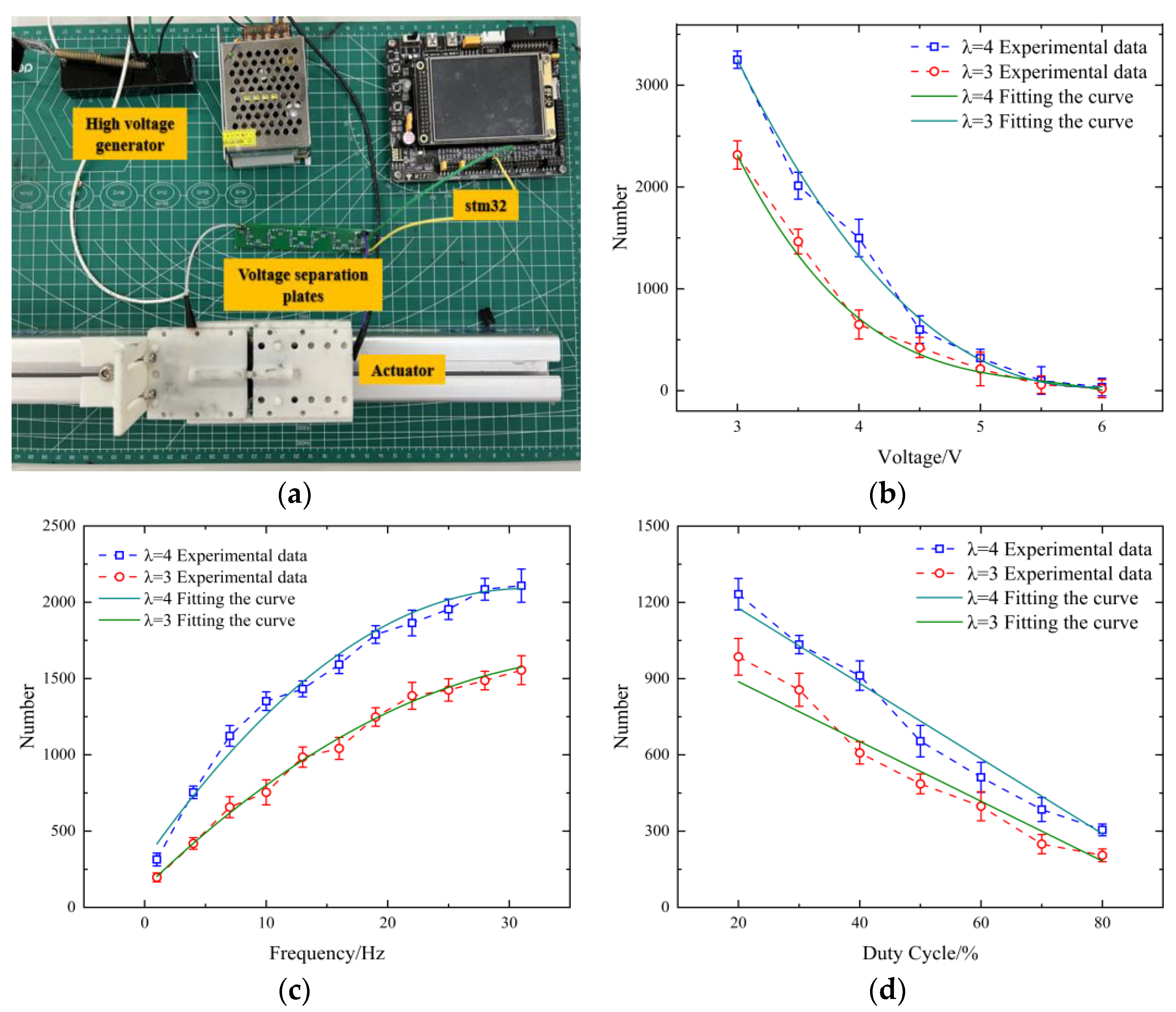
When making DE actuators or researching DE materials, it has often been observed that dielectric elastomer materials fail under the action of external forces or when high voltage is applied. The crawling actuator presented in this paper mainly relies on the expansion and contraction of the DE membrane to realize the movement of the robot, so it is imperative to study the cycle times of the DE membrane. The fatigue failure of the DE membrane is dynamic. Different waveforms of voltage in the experiment affected the deformation of DE membrane, thus directly affecting the number of actuators. The experimental apparatus is shown in
Figure 7a; one end of the drive can be fixed and the other end can be retracted. When the DE membrane is broken down, the high-voltage generator short-circuits and the current stops automatically. Using this characteristic, this paper provides a method to detect the voltage and count it with a single-chip computer. First, a sub plate was designed in which the resistance string is ten 20 M resistors and one 200 K resistor in series. The 200 K resistor in the dividing plate is connected in parallel with a capacitor. One end of the 10 M resistor is connected in series with the positive end of the high-voltage power supply, and the 200 K resistor and the capacitor in parallel with the negative end of the high-voltage power supply. The output voltage value was measured by means of resistance voltage division, so that the voltage measured by the microcontroller was controlled at 0–5 v. The sub plate and the actuator were connected in parallel, and finally stm32 connected to both ends of the 200 K resistor. The microcontroller ADC module starts timing at the moment when it detects the voltage. When the DE membrane is broken down, the microcontroller stops timing when the voltage is 0. Finally, the time recorded by the microcontroller was divided by the frequency of the square wave to obtain the number of cycles.
It can be seen from
Figure 7b that with the increase of voltage, the cycle times of the DE membrane gradually decreased. It was shown in a previous article that with the increase of voltage, the Maxwell force on the DE membrane is constantly increasing. The number of cycles that the film can cycle before failure is reduced due to the increase of stress. It can be seen from Formula
that Maxwell stress is proportional to the square of the voltage, so this function shows a relationship similar to the inverse quadratic function image. This view can also be confirmed from the fitting curve in the figure.
As shown in
Figure 7c, indicating the relationship between the voltage frequency and the number of cycles of the DE membrane, when the voltage was a square wave the number of cycles of the DE membrane was proportional to the frequency of the voltage. The specific reason is that the Maxwell stress of DE membrane changes slowly at low frequency, with a certain hysteresis compared with high frequency, so the deformation amplitude at low frequency is smaller, and the field strength at low frequency is higher, so the cycle times at high frequency are greater than that at low frequency.
It can be seen from
Figure 7d that with the increase of duty cycle, the number of fatigue failures gradually decreased, finally to a relatively small value. When the voltage exceeded its bearing range, the fatigue damage included breakdown damage due to the high voltage. The reason for this is that as the duty cycle increases, the high-voltage time takes more time in the power-on cycle, and the Maxwell force on the DE membrane takes more time. After increasing the force duration, the fatigue failure of the DE membrane occurs in advance, and the corresponding cycle times are correspondingly reduced. Because its duty cycle increased linearly, the reduction of fatigue failure times also presented a linear relationship. The possible errors in the figure may be caused by manual production, in which even the same steps may lead to different results due to small errors that we can only try to avoid through more elaborate production and multiple experiments.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}