
Path Tracking Control of an Autonomous Tractor Using Improved Stanley Controller Optimized with Multiple-Population Genetic Algorithm

Abstract
:1. Introduction
2. Materials and Methods
2.1. Tractor and Path Modelling
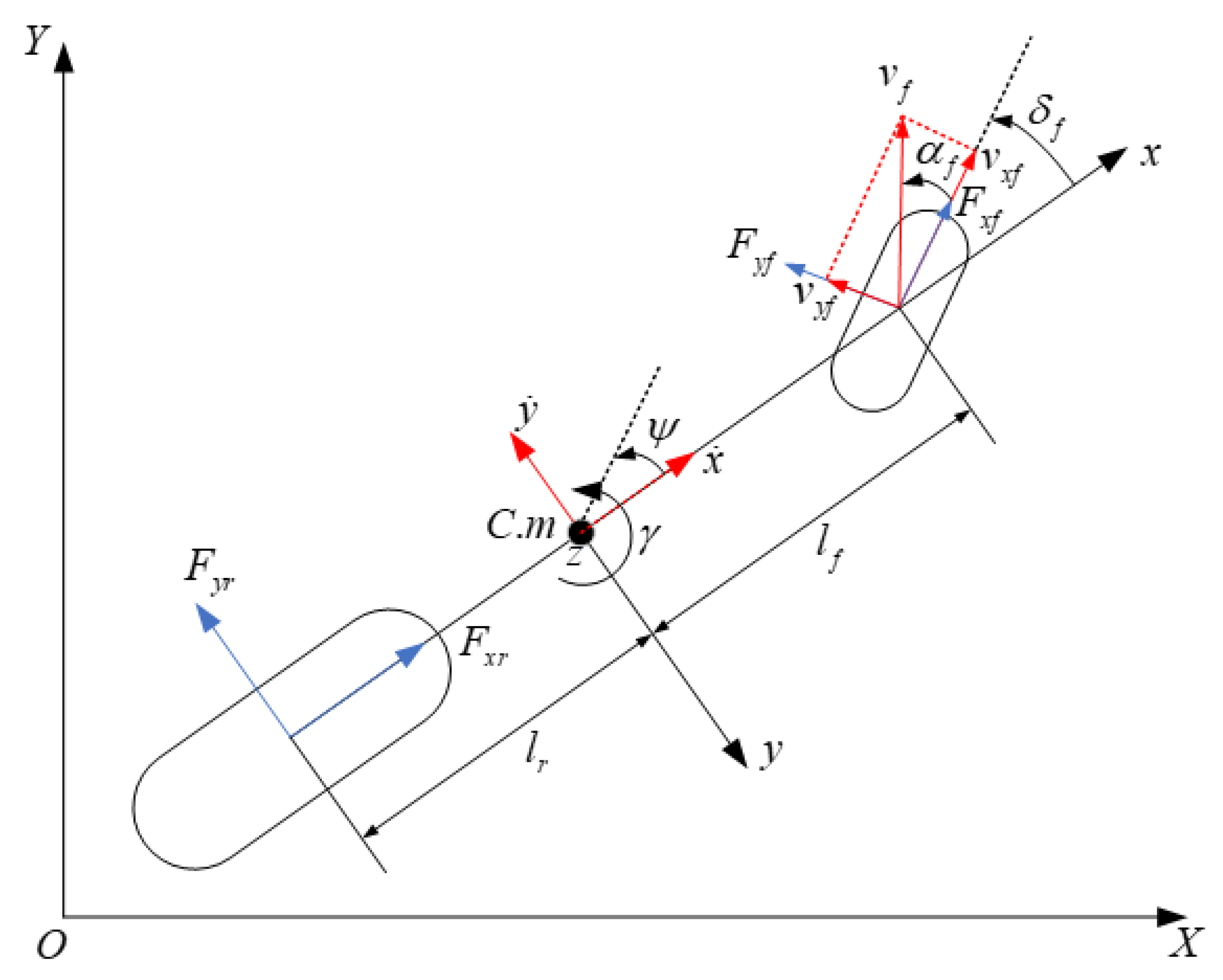
2.1.1. Two-Wheel Tractor Dynamic Model
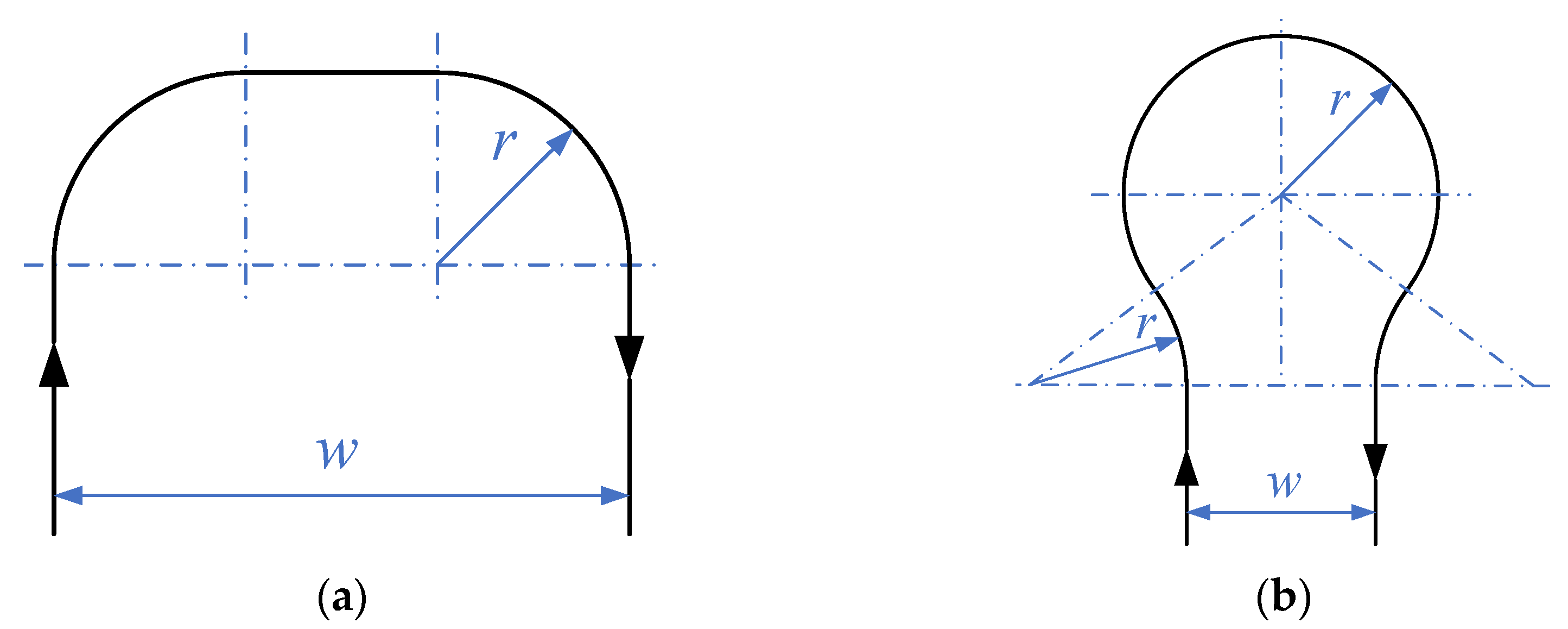
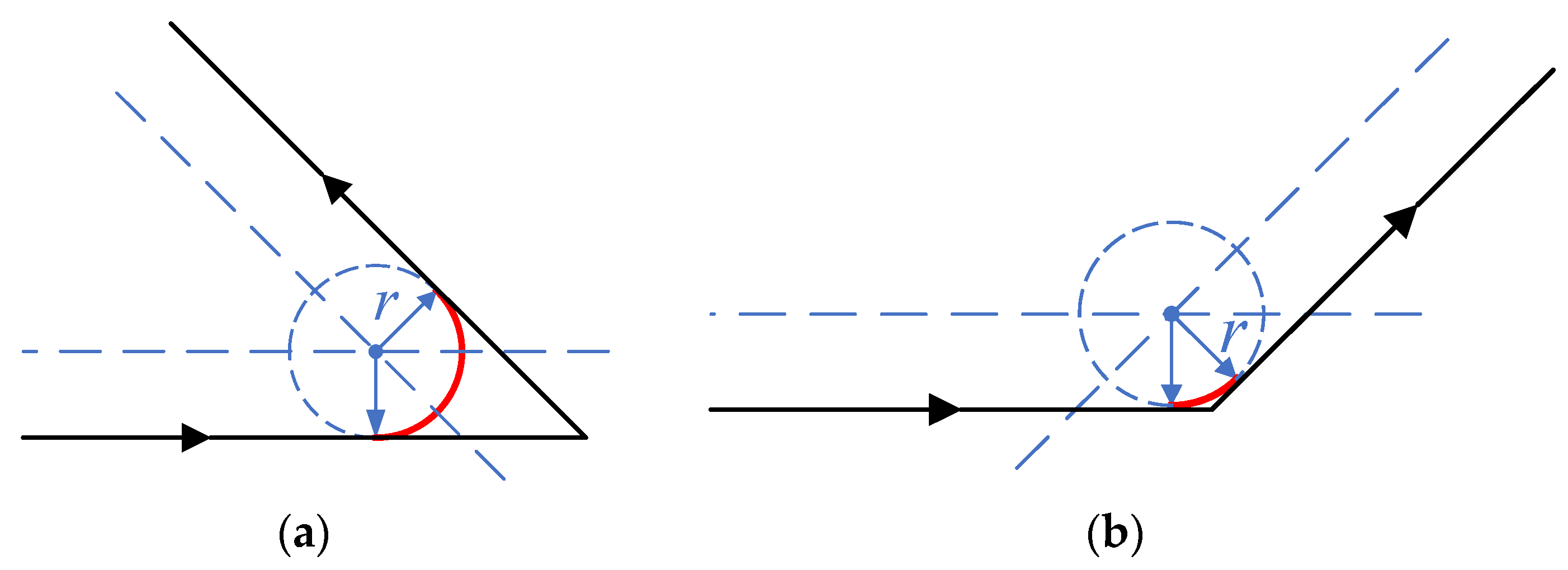
2.1.2. Tractor Turning Strategy
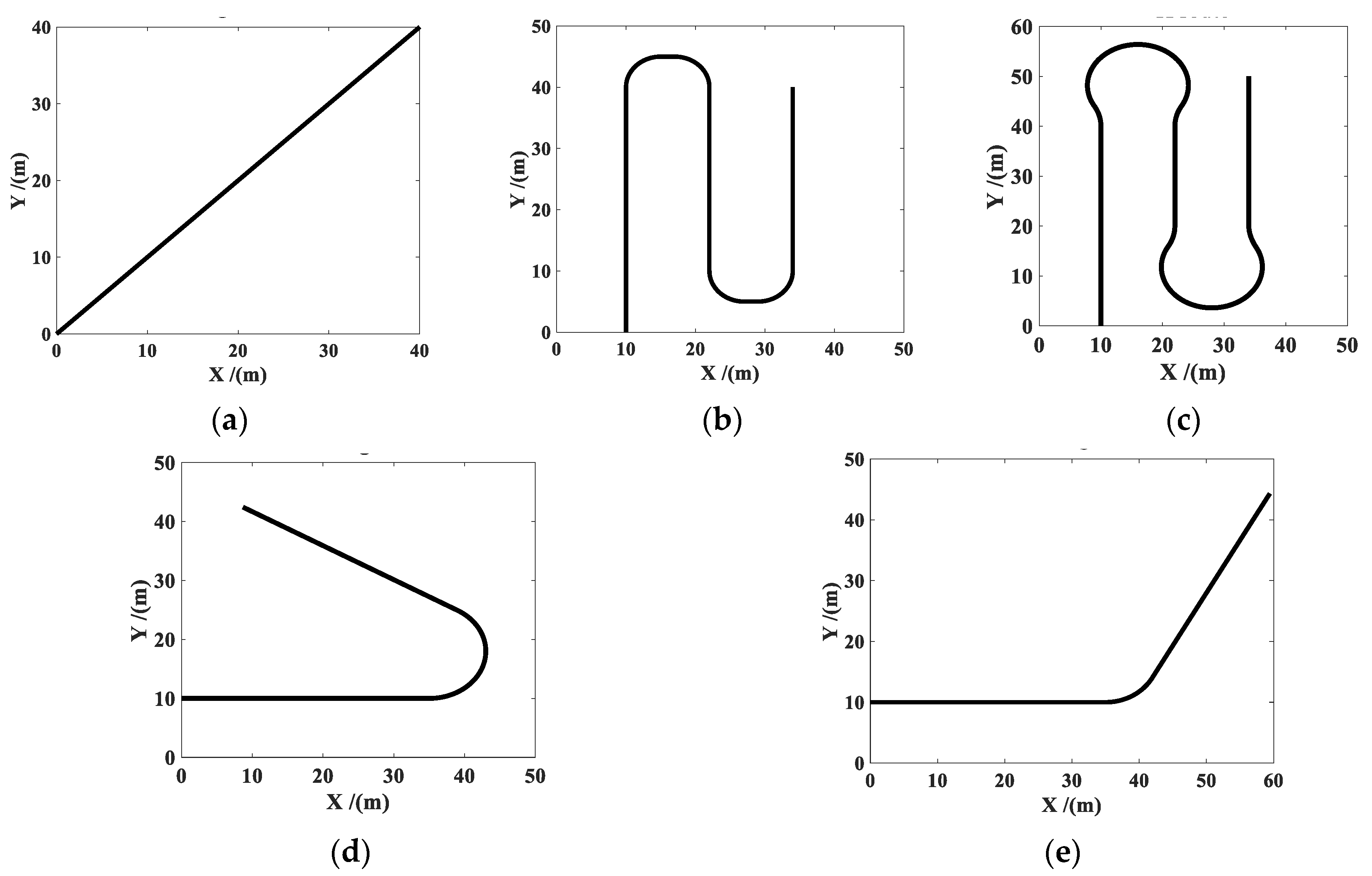
2.1.3. Tractor Working Route Development
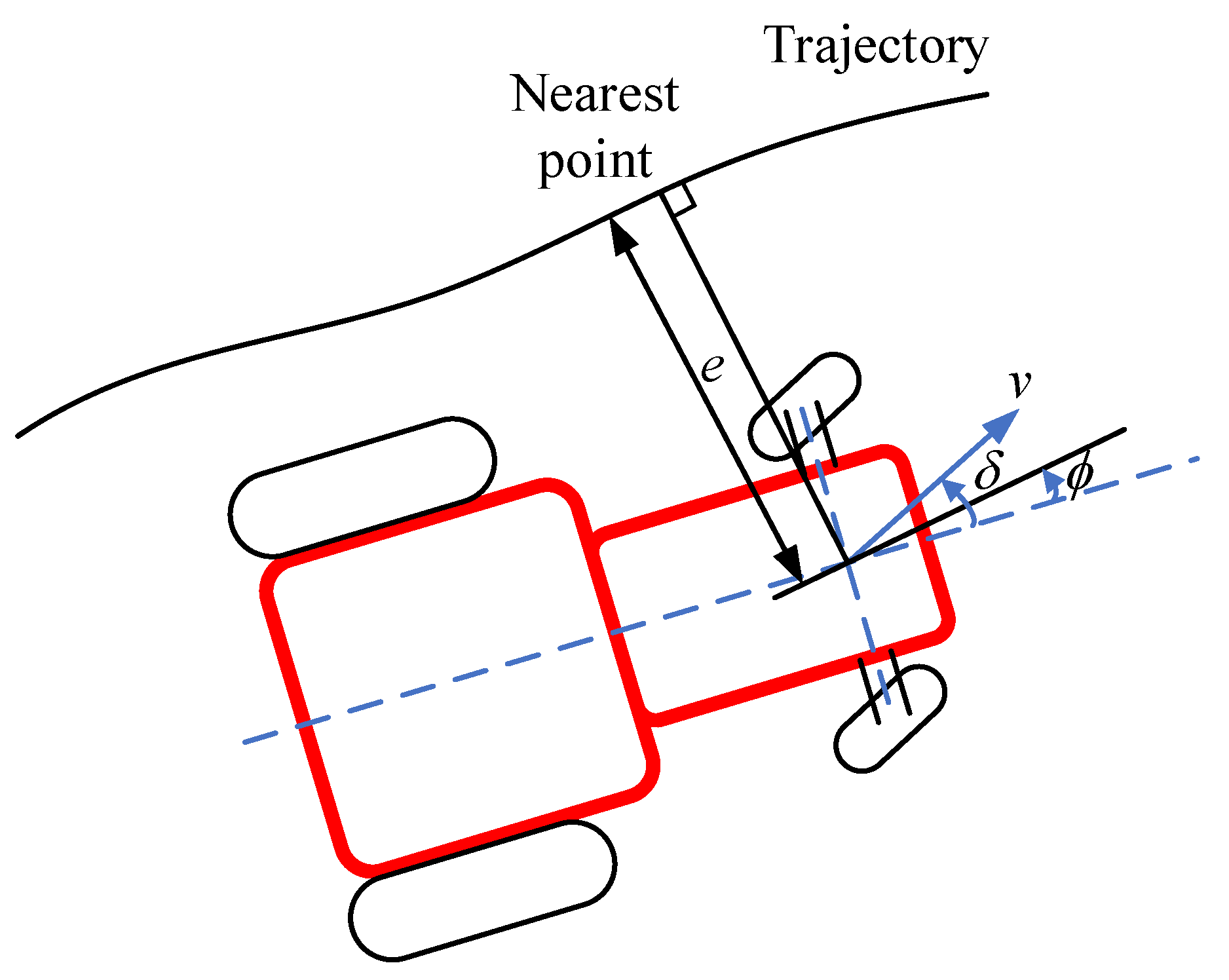
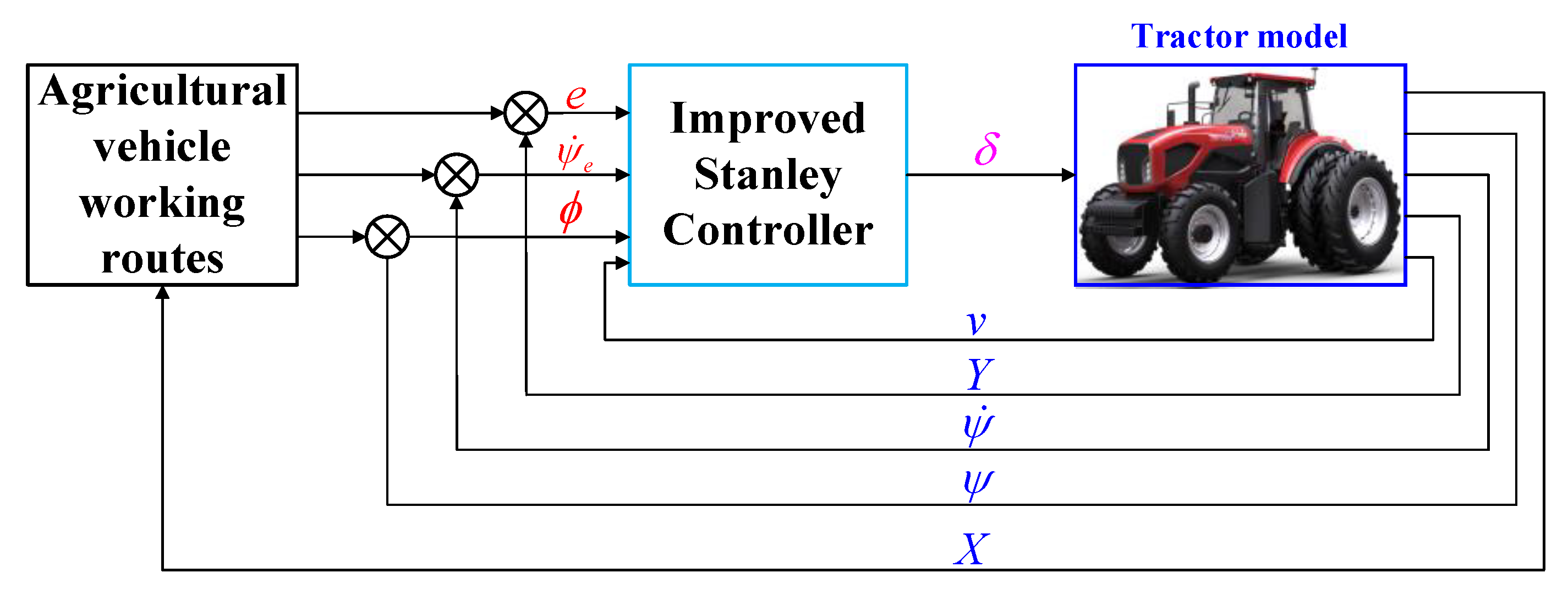
2.2. Path Tracking Control Strategies
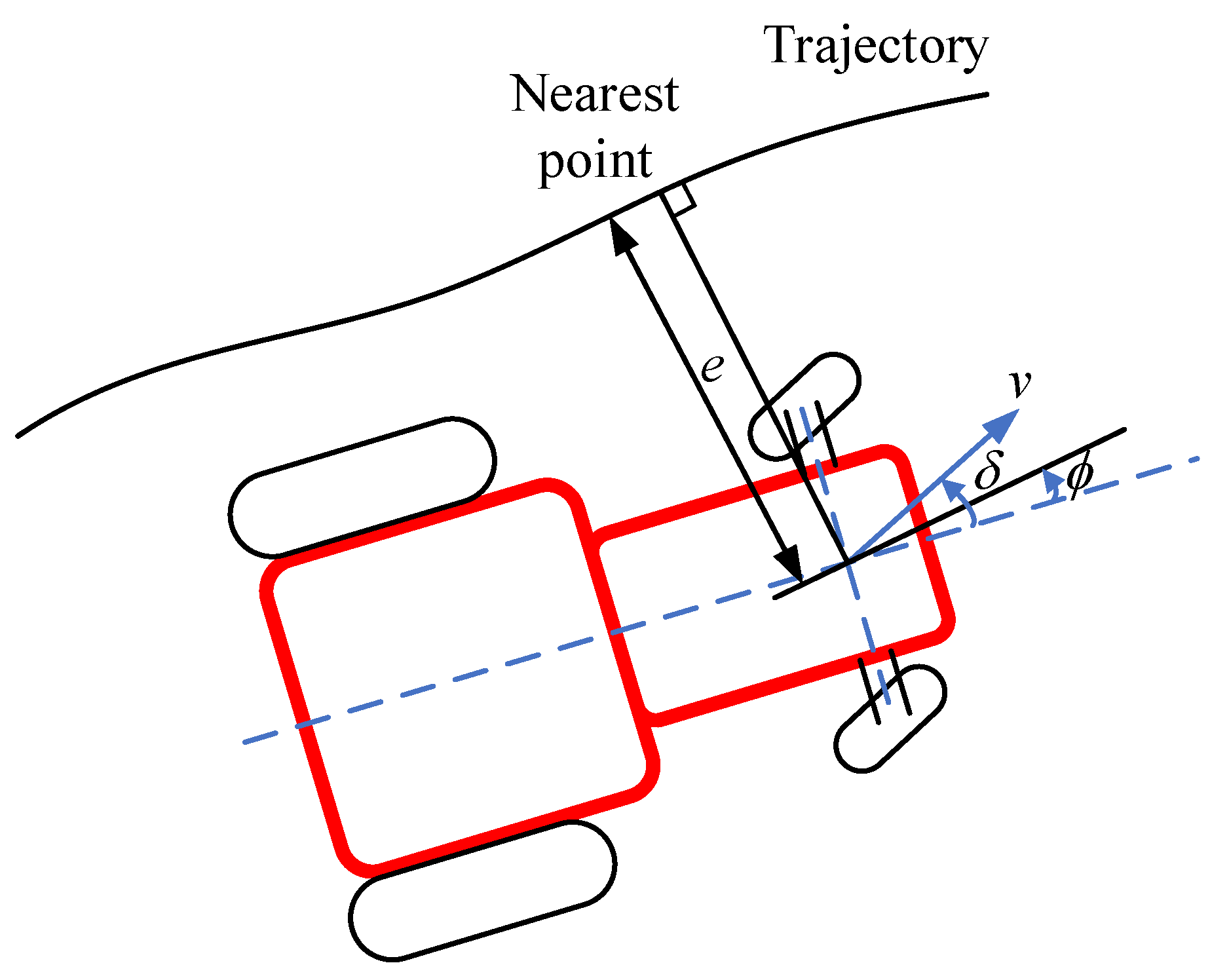
2.2.1. Stanley Controller (ST)
2.2.2. Extended Stanley Controller (EXT-ST)
2.2.3. Improved Stanley Controller (IMP-ST)
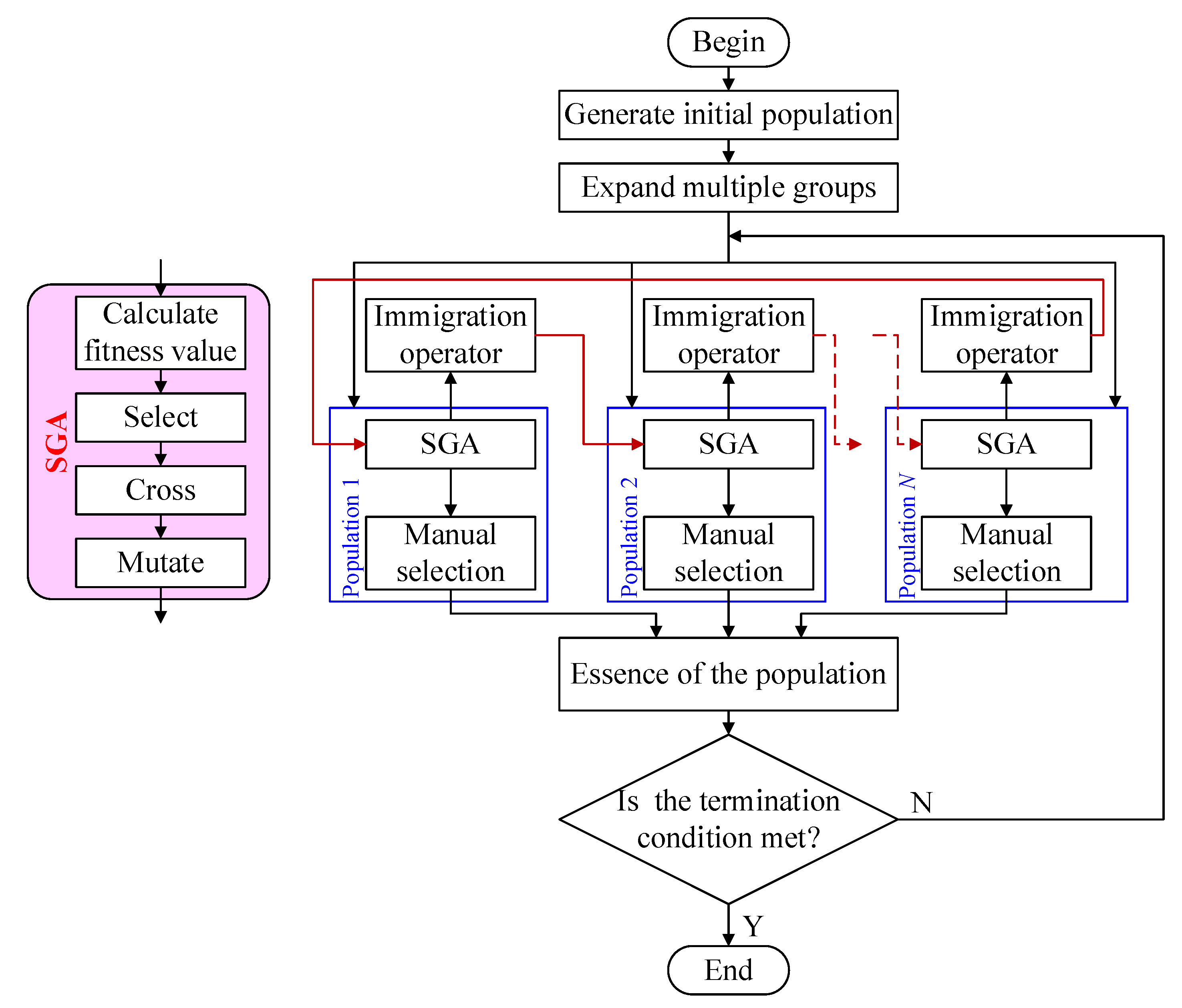
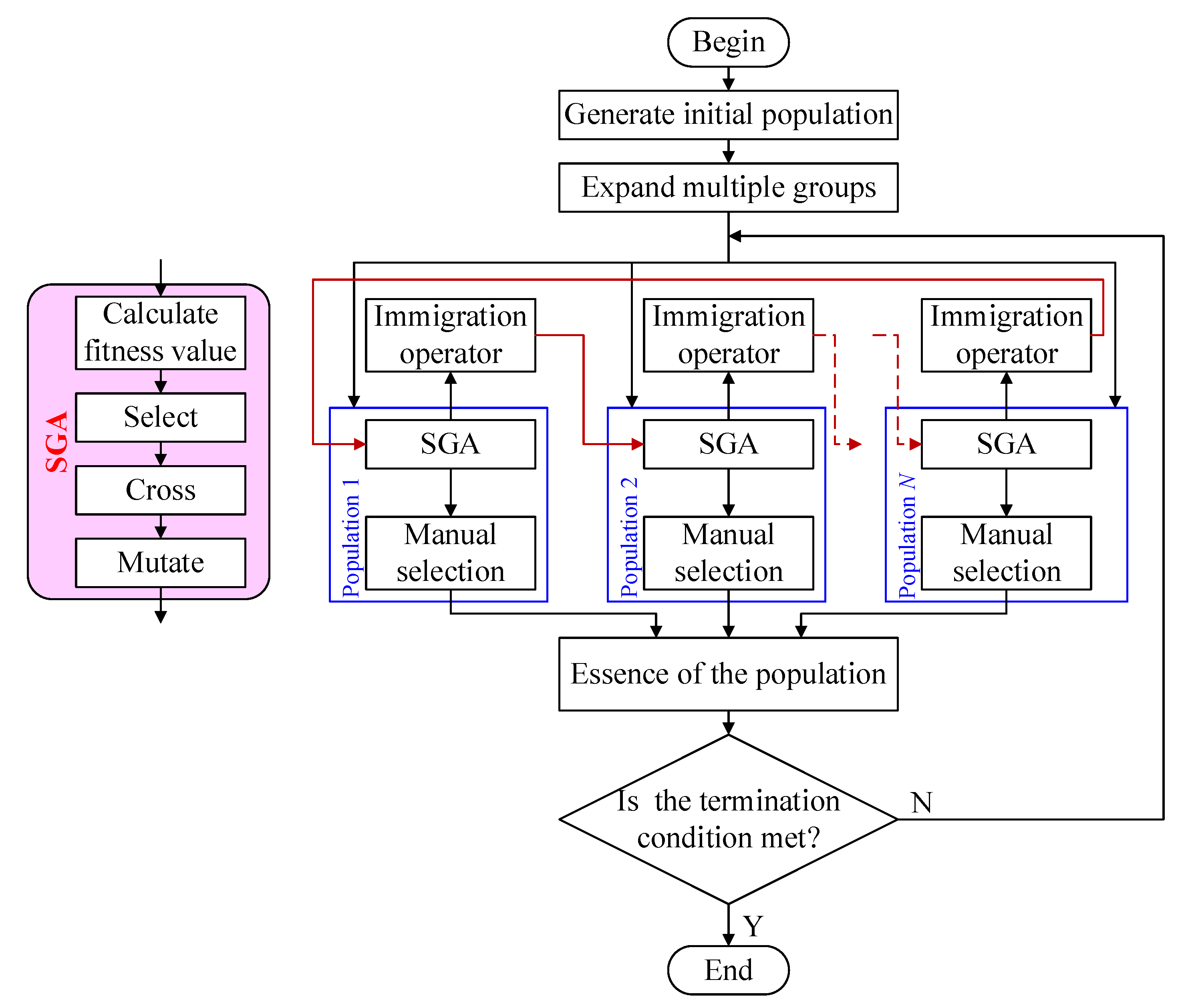
2.3. IMP-ST Parameter Tuning Using the MPGA
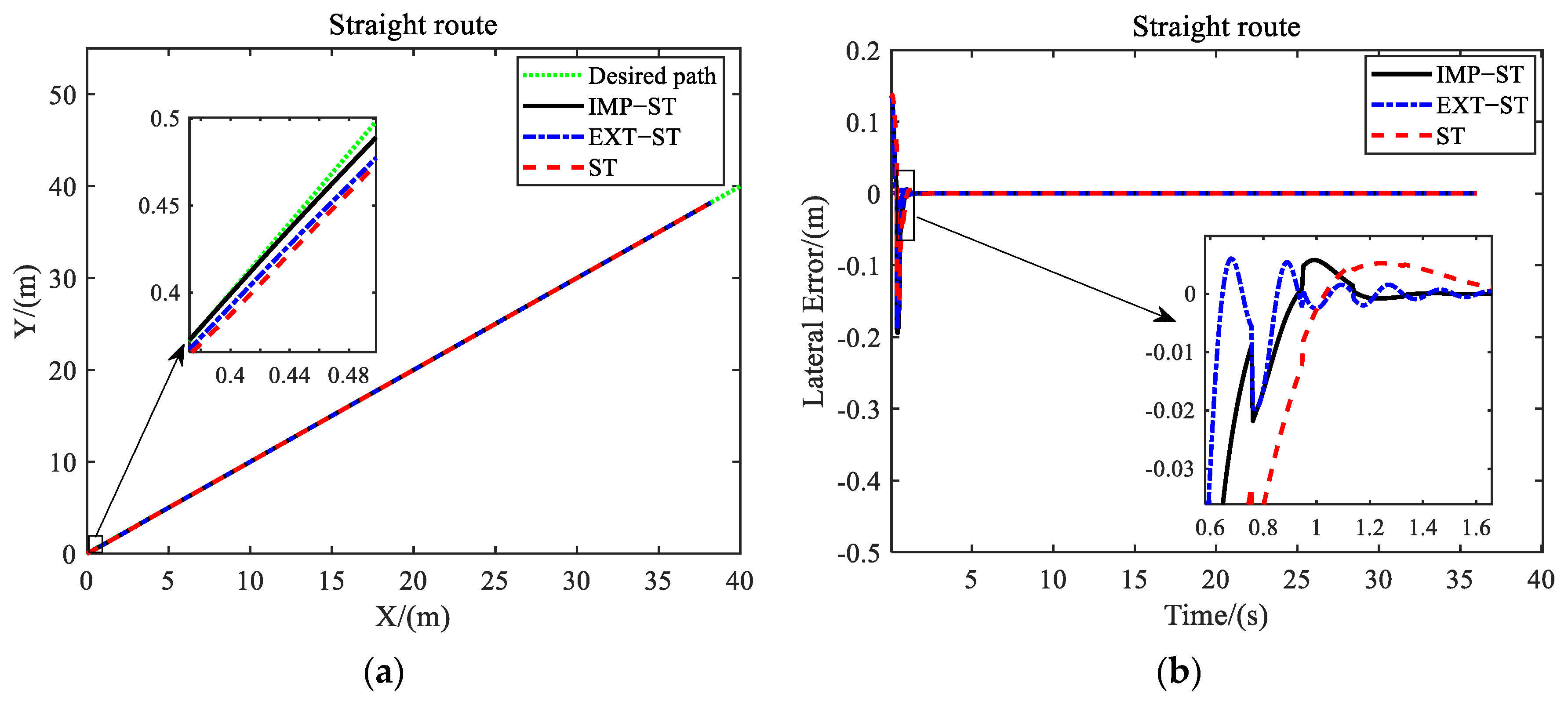
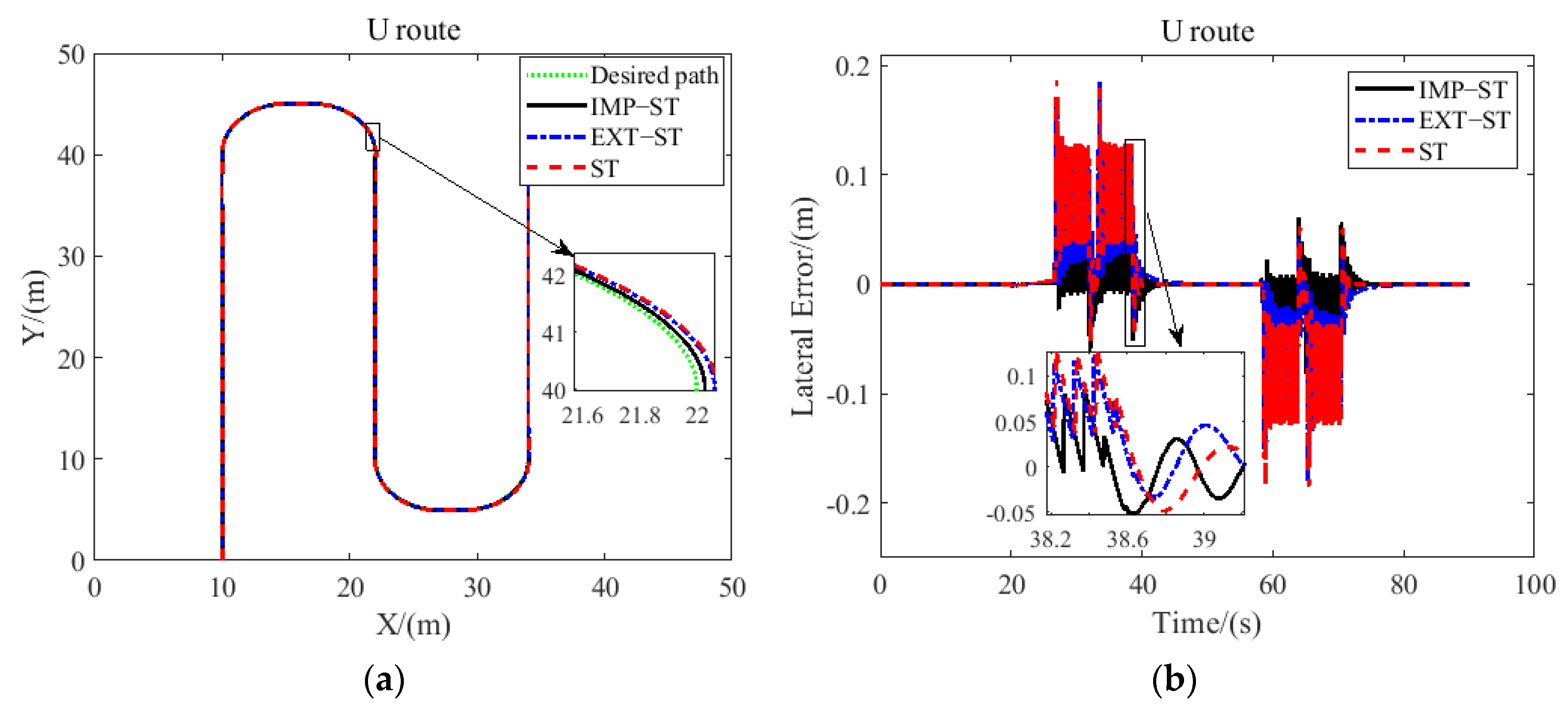
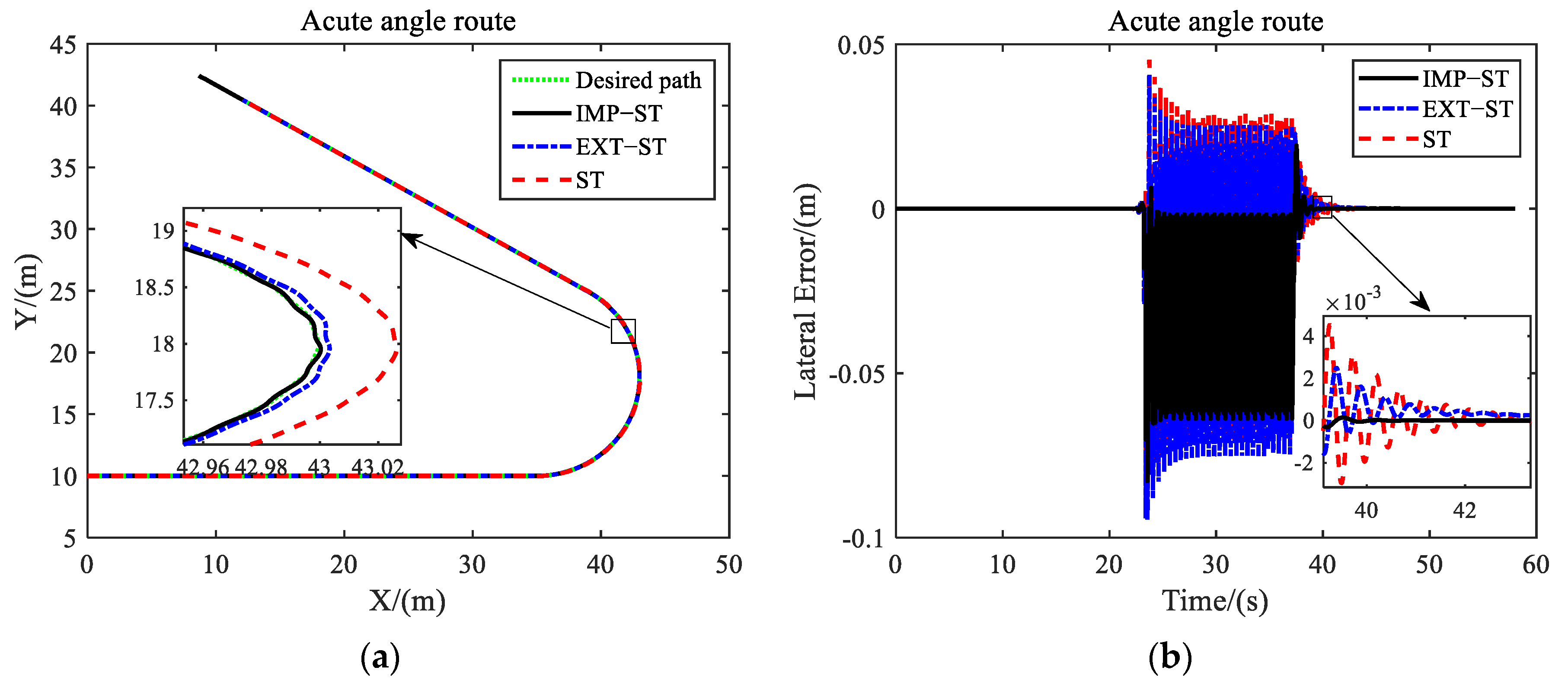
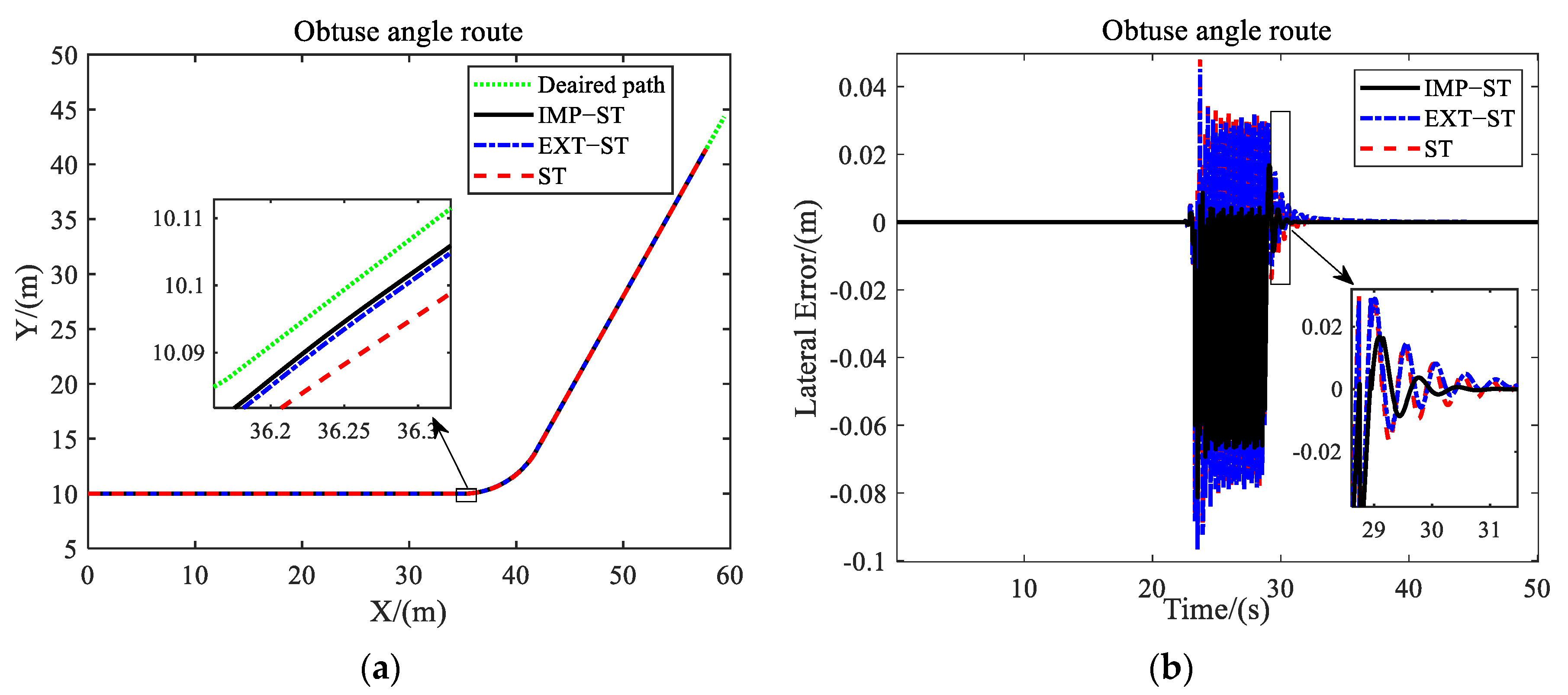
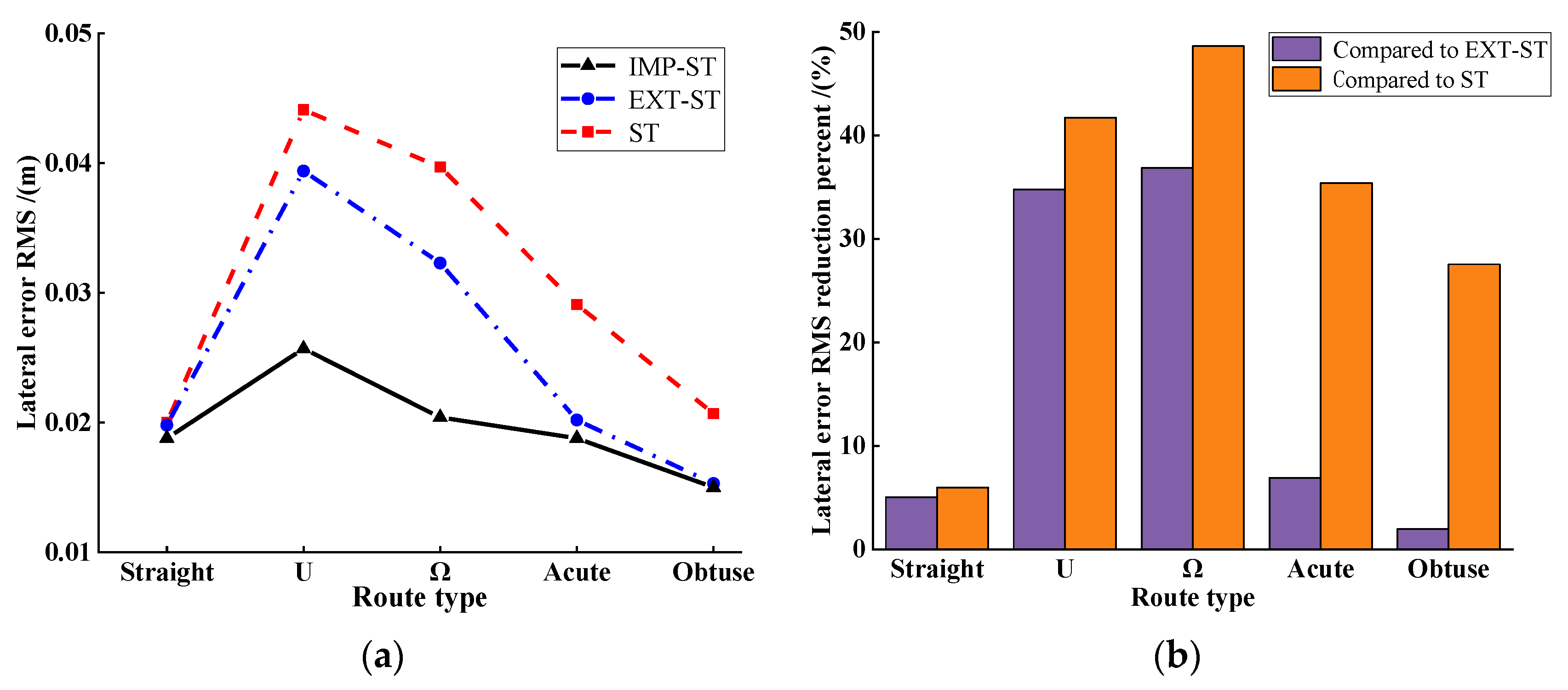
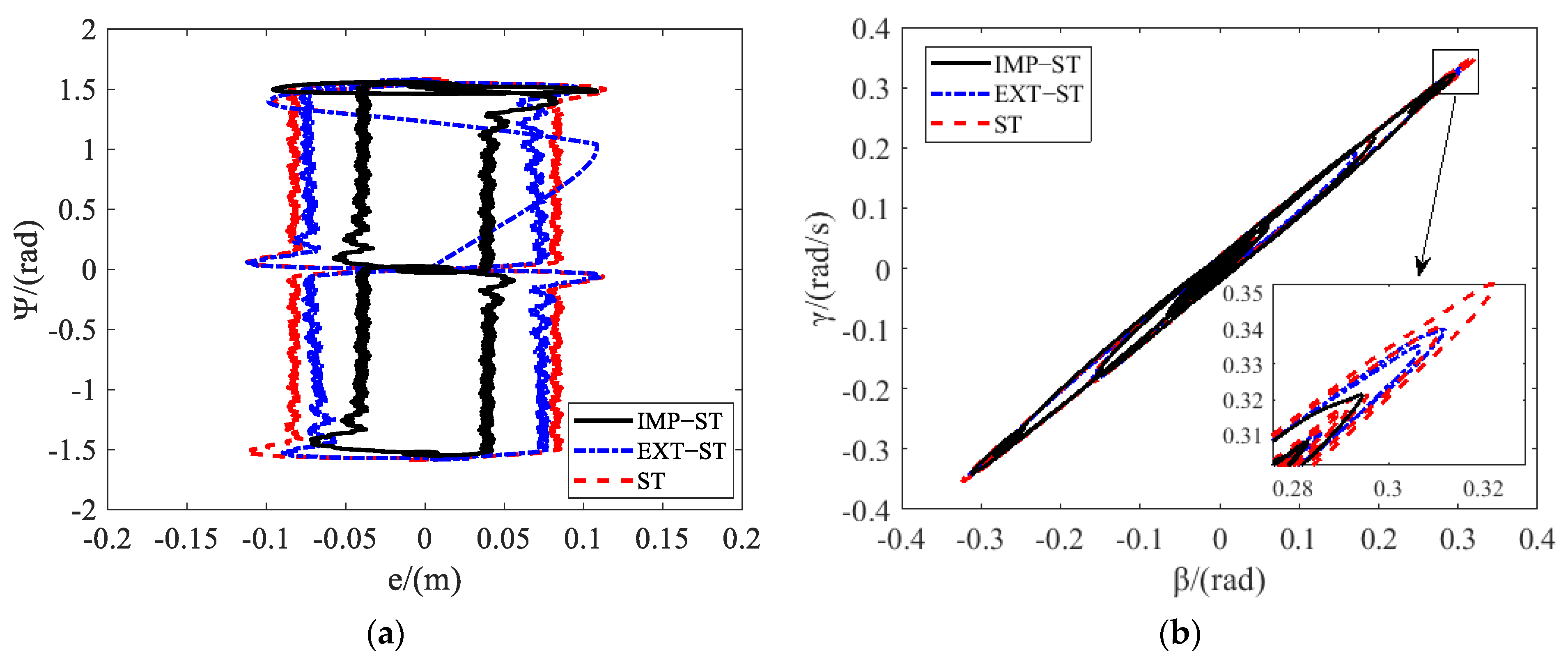
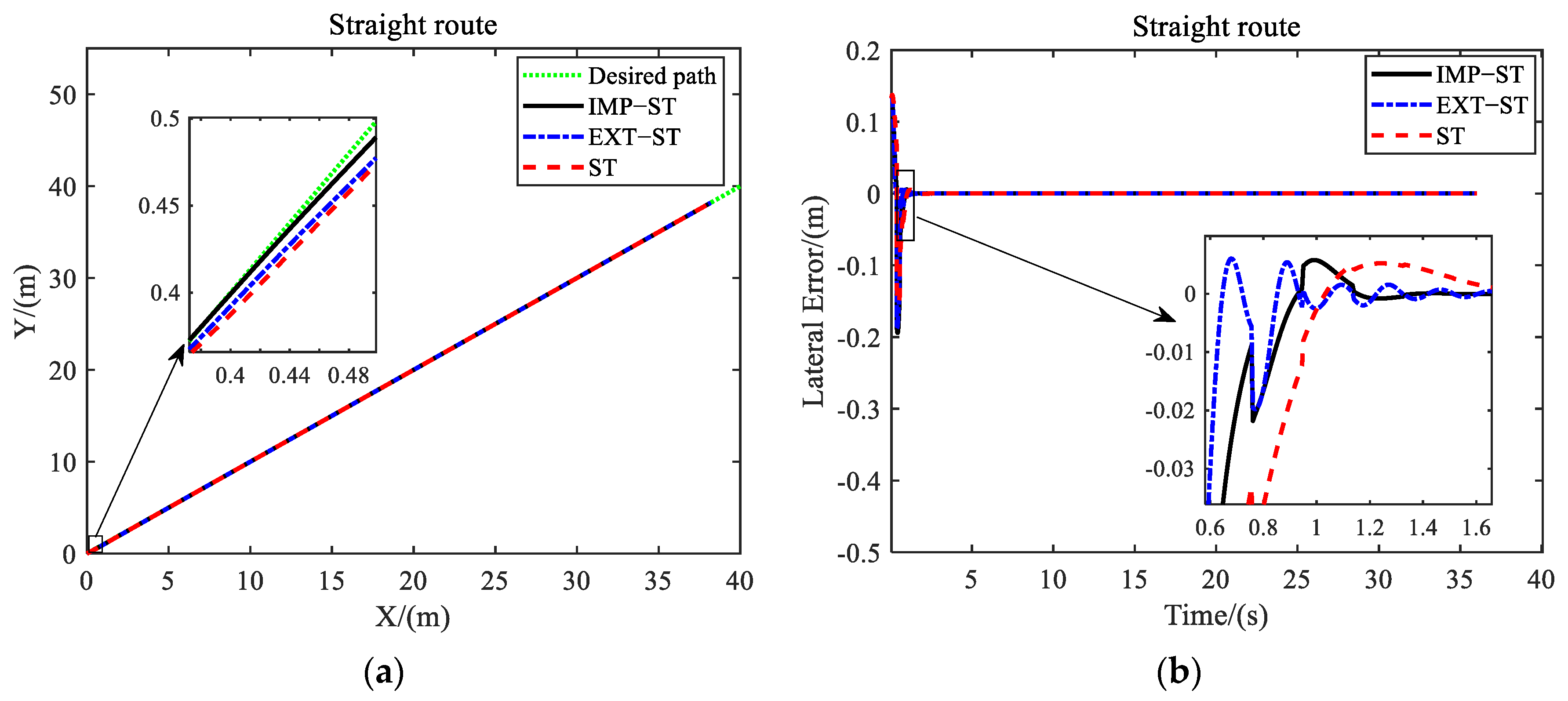
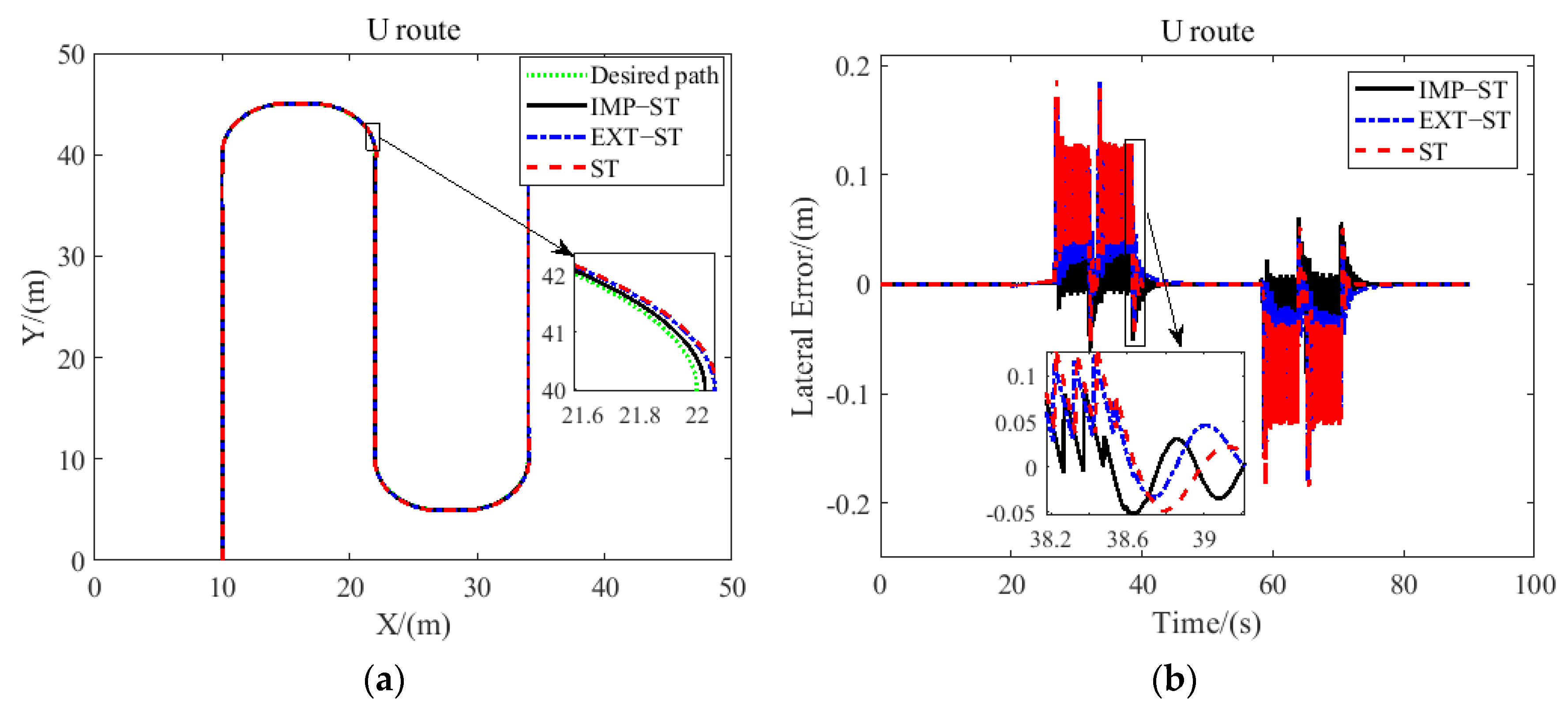
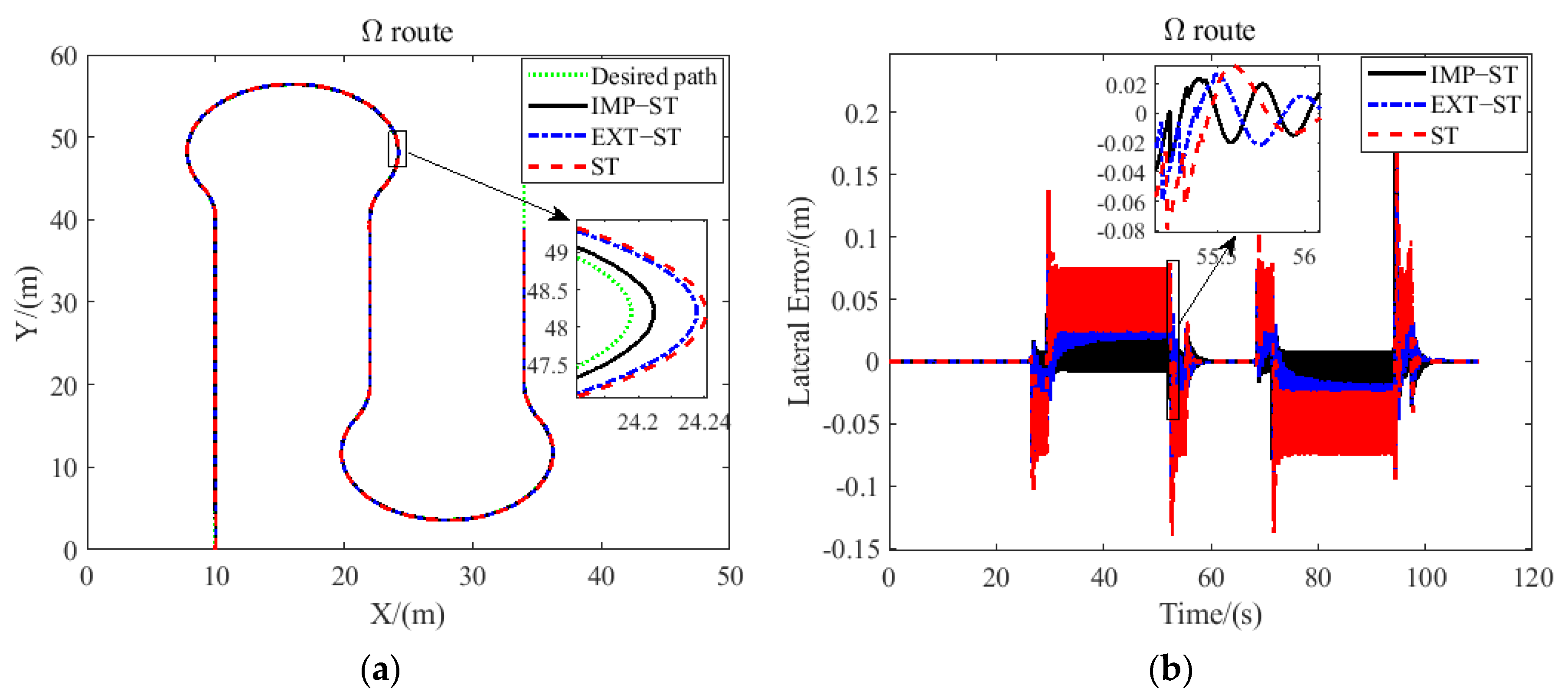
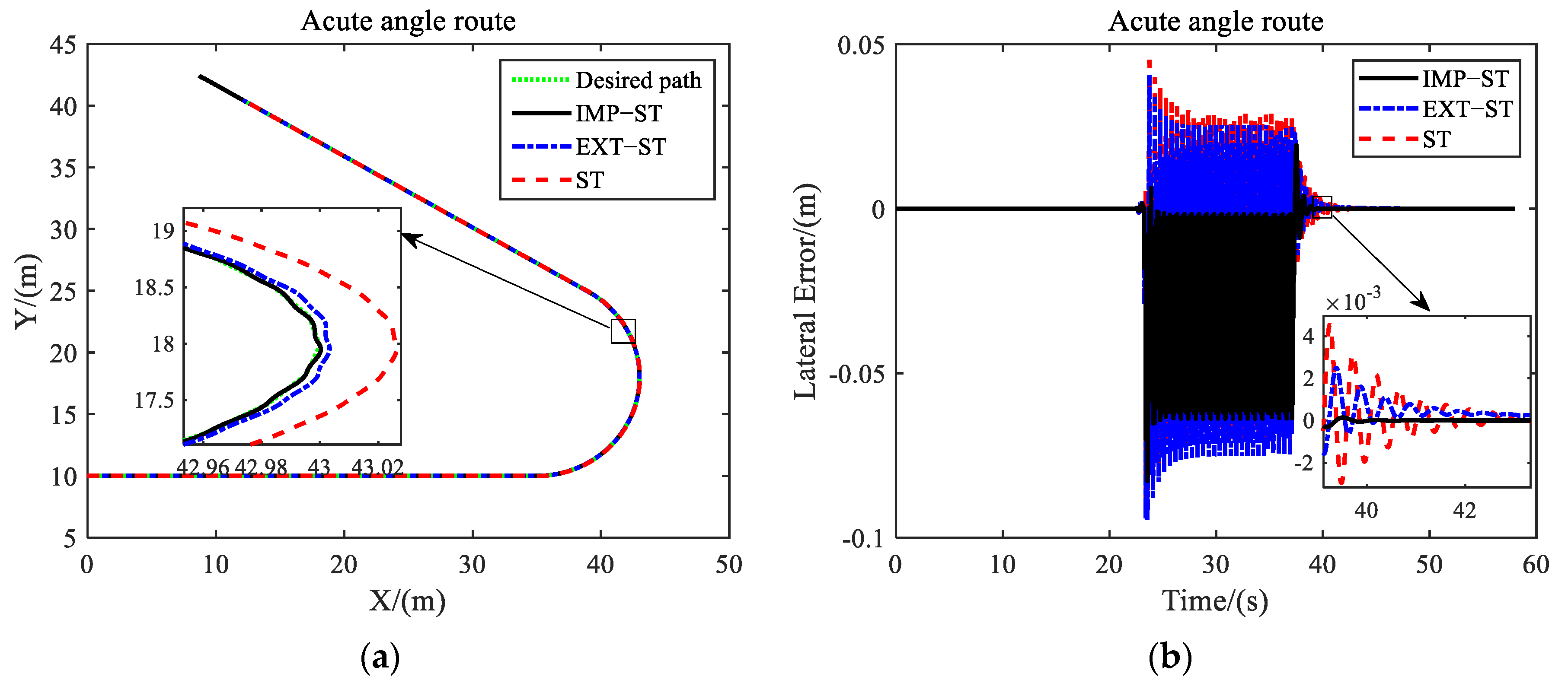
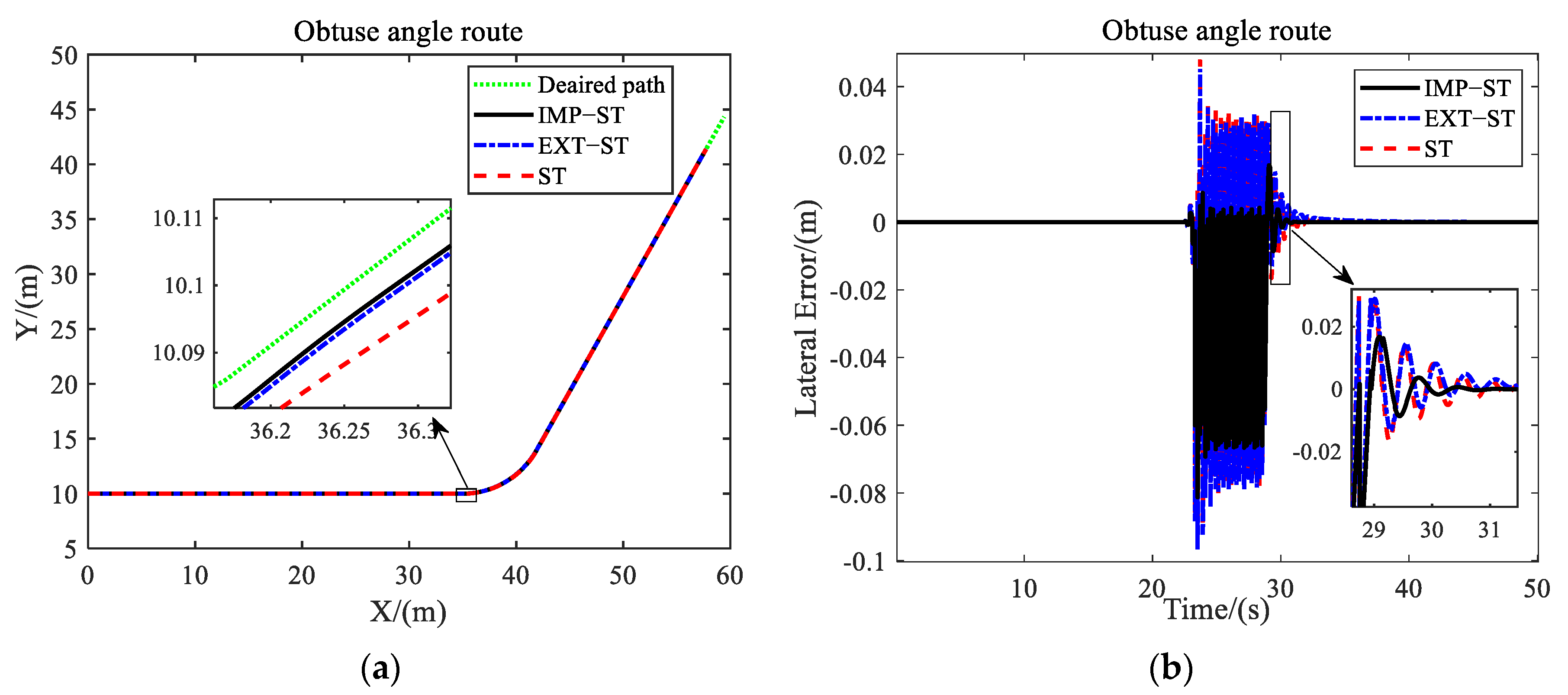
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, Z.; Chen, J.; Yoshida, T.; Torisu, R.; Song, Z.; Mao, E. Path tracking control of autonomous agricultural mobile robots. J. Zhejiang Univ. Sci. A 2007, 8, 1596–1603. [Google Scholar] [CrossRef]
- Bell, T. Automatic tractor guidance using carrier-phase differential GPS. Comput. Electron. Agric. 2000, 25, 53–66. [Google Scholar] [CrossRef]
- Yin, X.; Du, J.; Noguchi, N.; Yang, T.; Jin, C. Development of autonomous navigation system for rice transplanter. Int. J. Agric. Biol. Eng. 2018, 11, 89–94. [Google Scholar] [CrossRef] [Green Version]
- Yin, X.; Noguchi, N.; Choi, J. Development of a target recognition and following system for a field robot. Comput. Electron. Agric. 2013, 98, 17–24. [Google Scholar] [CrossRef]
- Cho, S.I.; Chang, S.J.; Kim, Y.Y.; An, K.J. Development of a three-degrees-of-freedom robot for harvesting lettuce using machine vision and fuzzy logic control. Biosyst. Eng. 2002, 82, 143–149. [Google Scholar] [CrossRef]
- Meng, Q.; Qiu, R.; Zhang, M.; Liu, G.; Xiang, M. Navigation system of agricultural vehicle based on fuzzy logic controller with improved particle swarm optimization algorithm. Trans. Chin. Soc. Agric. Mach. 2015, 46, 29–36. [Google Scholar]
- Mercorelli, P. Using fuzzy PD controllers for soft motions in a car-like robot. Adv. Sci. Technol. Eng. Syst. J. 2018, 3, 380–390. [Google Scholar] [CrossRef] [Green Version]
- Jiao, J.; Chen, J.; Qiao, Y.; Wang, W.; Li, Z. Adaptive sliding mode control of trajectory tracking based on DC motor drive for agricultural tracked robot. Trans. Chin. Soc. Agric. Eng. 2018, 34, 64–70. [Google Scholar]
- Liu, Z.; Zheng, W.; Wang, N.; Lyu, Z.; Zhang, W. Trajectory tracking control of tractors based on disturbance test. Int. J. Agric. Biol. Eng. 2020, 13, 138–145. [Google Scholar]
- Liu, Z.; Lv, Z.; Zheng, W.; Zhang, W.; Cheng, X. Design of obstacle avoidance controller for agricultural tractor based on ROS. Int. J. Agric. Biol. Eng. 2019, 12, 58–65. [Google Scholar] [CrossRef]
- Vougioukas, S.; Blackmore, S.; Nielsen, J.; Fountas, S. A two-stage optimal motion planner for autonomous agricultural vehicles. Precis. Agric. 2006, 7, 361–377. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, Z.; Torisu, R.; Taketa, J. On-tracking control of tractor running along curved paths. Trans. Chin. Soc. Agric. Eng. 2006, 22, 108–111. [Google Scholar]
- Li, G.; Wang, Y.; Guo, L.; Tong, J.; He, Y. Improved pure pursuit algorithm for rice transplanter path tracking. Trans. Chin. Soc. Agric. Mach. 2018, 49, 21–26. [Google Scholar]
- Tang, X.; Tao, J.; Li, Z.; Li, Y.; Liu, C. Fuzzy control optimization method for stability of path tracking system of automatic transplanter. Trans. Chin. Soc. Agric. Mach. 2018, 49, 29–34. [Google Scholar]
- Li, T.; Hu, J.; Gao, L.; Liu, X.; Bai, X. Agricultural machine path tracking method based on fuzzy adaptive pure pursuit model. Trans. Chin. Soc. Agric. Mach. 2013, 44, 205–210. [Google Scholar]
- Zakaria, M.; Zakaria, A.; Zamzuri, H.; Mazlan, S.A. Dynamic curvature steering control for autonomous vehicle: Performance analysis. IOP Conf. Ser. 2016, 114, 012149. [Google Scholar] [CrossRef] [Green Version]
- Hoffmann, G.M.; Tomlin, C.J.; Montemerlo, M.; Thrun, S. Autonomous automobile trajectory tracking for off-road driving: Controller design, experimental validation and racing. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 11–13 July 2007. [Google Scholar]
- Viloria, A.; Zelaya, N.; Varela, N. Design and simulation of vehicle controllers through genetic algorithms. Procedia Comput. Sci. 2020, 175, 453–458. [Google Scholar] [CrossRef]
- Qian, Y.; Ou, G.; Maghareh, A.; Dyke, S.J. Parametric identification of a servo-hydraulic actuator for real-time hybrid simulation. Mech. Syst. Signal Process. 2014, 48, 260–273. [Google Scholar] [CrossRef]
- Receveur, J.; Victor, S.; Melchior, P. Robust longitudinal motion planning using vehicle model inversion. IFAC-PapersOnLine 2019, 52, 103–108. [Google Scholar] [CrossRef]
- Shen, C.; Song, R.; Li, J.; Zhang, X.; Tang, J.; Shi, Y.; Liu, J.; Cao, H. Temperature drift modeling of MEMS gyroscope based on genetic-Elman neural network. Mech. Syst. Signal Proc. 2016, 72–73, 897–905. [Google Scholar]
- Feng, H.; Yin, C.; Weng, W.; Ma, W.; Zhou, J. Robotic excavator trajectory control using an improved GA based PID controller. Mech. Syst. Signal Proc. 2018, 105, 153–168. [Google Scholar] [CrossRef]
- Meng, Y.; Gan, X.; Wang, Y.; Gu, Q. LQR-GA controller for articulated dump truck path tracking system. J. Shanghai Jiaotong Univ. 2019, 24, 78–85. [Google Scholar] [CrossRef]
- Lu, K.; An, X.; Li, J.; He, H. Efficient deep network for vision-based object detection in robotic applications. Neurocomputing 2017, 245, 31–45. [Google Scholar] [CrossRef]
- Reina, D.G.; Tawfik, H.M.; Toral, S.L. Multi-subpopulation evolutionary algorithms for coverage deployment of UAV-networks. Ad Hoc Netw. 2018, 68, 16–32. [Google Scholar] [CrossRef]
- Yu, Z. Vehicle Theory, 5th ed.; China Machine Press: Beijing, China, 1990; pp. 144–146. [Google Scholar]
- Joop, P.P. Essentials of Vehicle Dynamics, 5th ed.; Elsevier: Amsterdam, The Netherlands, 2015; pp. 131–138. [Google Scholar]
- Amer, N.H.; Zamzuri, H.; Hudha, K.; Aparow, V.R.; Kadir, Z.A. Path tracking controller of an autonomous armoured vehicle using modified Stanley controller optimized with particle swarm optimization. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 104. [Google Scholar] [CrossRef]
- Rao, C.S.; Santosh, S.; Ram, D. Tuning optimal PID controllers for open loop unstable first order plus time delay systems by minimizing ITAE criterion. IFAC-PapersOnLine 2020, 53, 123–128. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Symbol Name |
|---|---|
| δf | front wheel angle |
| vf | midpoint speed of front axle |
| vxf | longitudinal speed of front wheel |
| vyf | lateral speed of front wheel |
| αf | front tire sideslip angle |
| Fxf | front wheel longitudinal force |
| Fyf | front wheel lateral force |
| Fxr | rear wheel longitudinal force |
| Fyr | rear wheel lateral force |
| lf | distance between front axle and center of tractor mass |
| lr | distance between rear axle and center of tractor mass |
| tractor yaw angle | |
| tractor longitudinal speed | |
| tractor lateral speed | |
| tractor yaw rate |
| ST | EXT-ST | IMP-ST | |||||||
|---|---|---|---|---|---|---|---|---|---|
| k | kϕ | k | kψ | kϕ | k1 | k | k2 | kψ | |
| Straight | 6.0957 | 1.8698 | 19.9998 | 1.6329 | 4.6185 | 15.7678 | 6.1812 | 0.0762 | 7.3743 |
| U | 20 | 10.6532 | 19.9999 | −0.1335 | −19.0676 | −3.8958 | −16.5742 | 0.0147 | 0.3219 |
| Ω | 20 | 20 | 20 | 0.063 | −19.9993 | 17.2829 | 5.0357 | −0.012 | 1.075 |
| Acute angle | 20 | 20 | 20 | −0.1069 | 8.6726 | −5.9782 | −5.8169 | −0.0225 | −0.0891 |
| Obtuse angle | 20 | 16.8435 | 19.9999 | −0.1006 | 5.8624 | −3.0214 | −10.6447 | 0.0196 | −0.0687 |
| Symbol | Unit | Value |
|---|---|---|
| mass | kg | 10,017 |
| Iz | kg·m2 | 15,000 |
| length | m | 6.28 |
| width | m | 2.49 |
| height | m | 3.4 |
| wheelbase | m | 3 |
| lf | m | 1.84 |
| lr | m | 1.44 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Zhai, Z.; Zhu, Z.; Mao, E. Path Tracking Control of an Autonomous Tractor Using Improved Stanley Controller Optimized with Multiple-Population Genetic Algorithm. Actuators 2022, 11, 22. https://doi.org/10.3390/act11010022
Wang L, Zhai Z, Zhu Z, Mao E. Path Tracking Control of an Autonomous Tractor Using Improved Stanley Controller Optimized with Multiple-Population Genetic Algorithm. Actuators. 2022; 11(1):22. https://doi.org/10.3390/act11010022
Chicago/Turabian StyleWang, Liang, Zhiqiang Zhai, Zhongxiang Zhu, and Enrong Mao. 2022. "Path Tracking Control of an Autonomous Tractor Using Improved Stanley Controller Optimized with Multiple-Population Genetic Algorithm" Actuators 11, no. 1: 22. https://doi.org/10.3390/act11010022
APA StyleWang, L., Zhai, Z., Zhu, Z., & Mao, E. (2022). Path Tracking Control of an Autonomous Tractor Using Improved Stanley Controller Optimized with Multiple-Population Genetic Algorithm. Actuators, 11(1), 22. https://doi.org/10.3390/act11010022