
Reversible Torsional Actuation of Hydrogel Filled Multifilament Fibre Actuator

 , ,
, ,  and
and 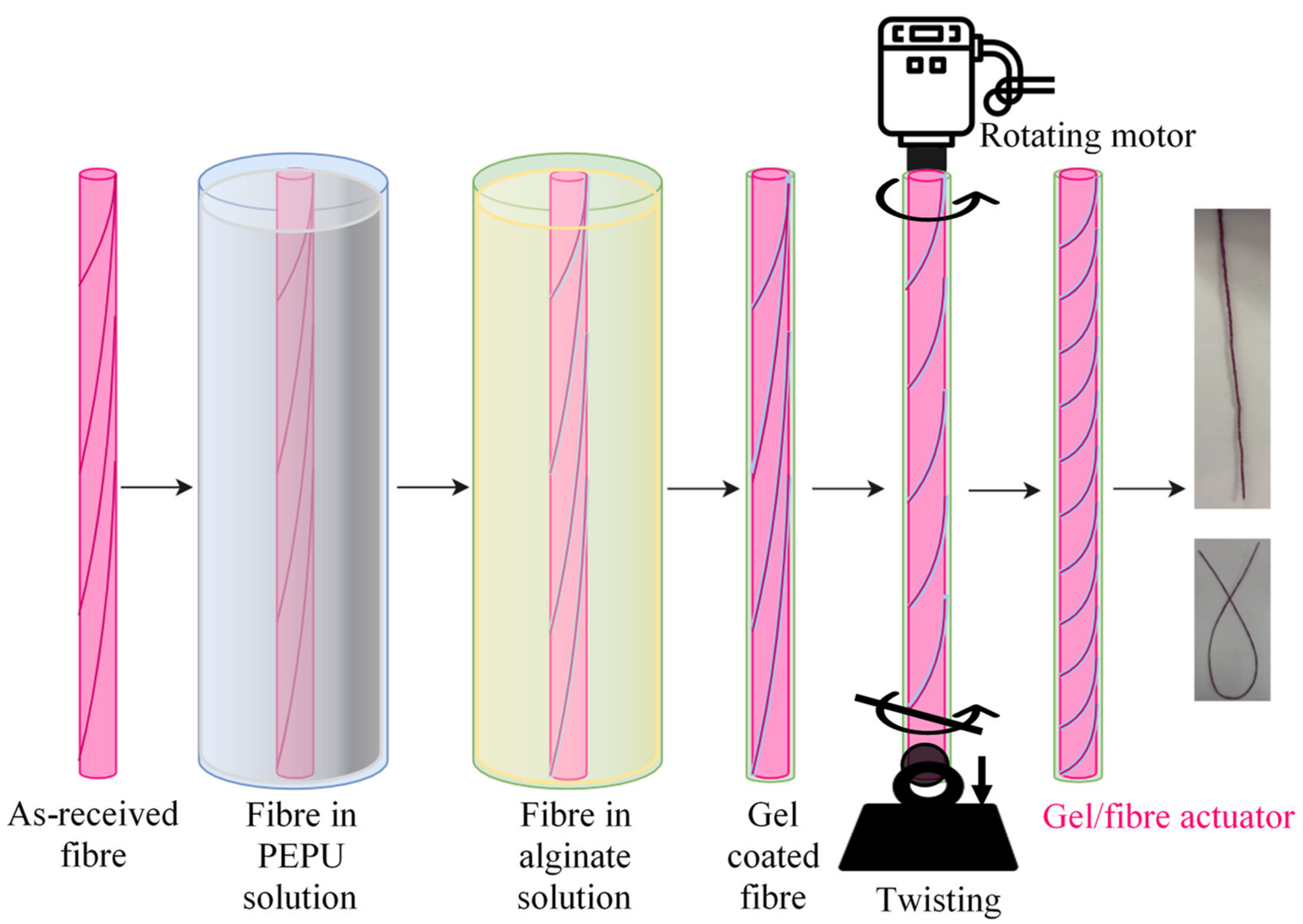{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Preparation of Gel Solutions
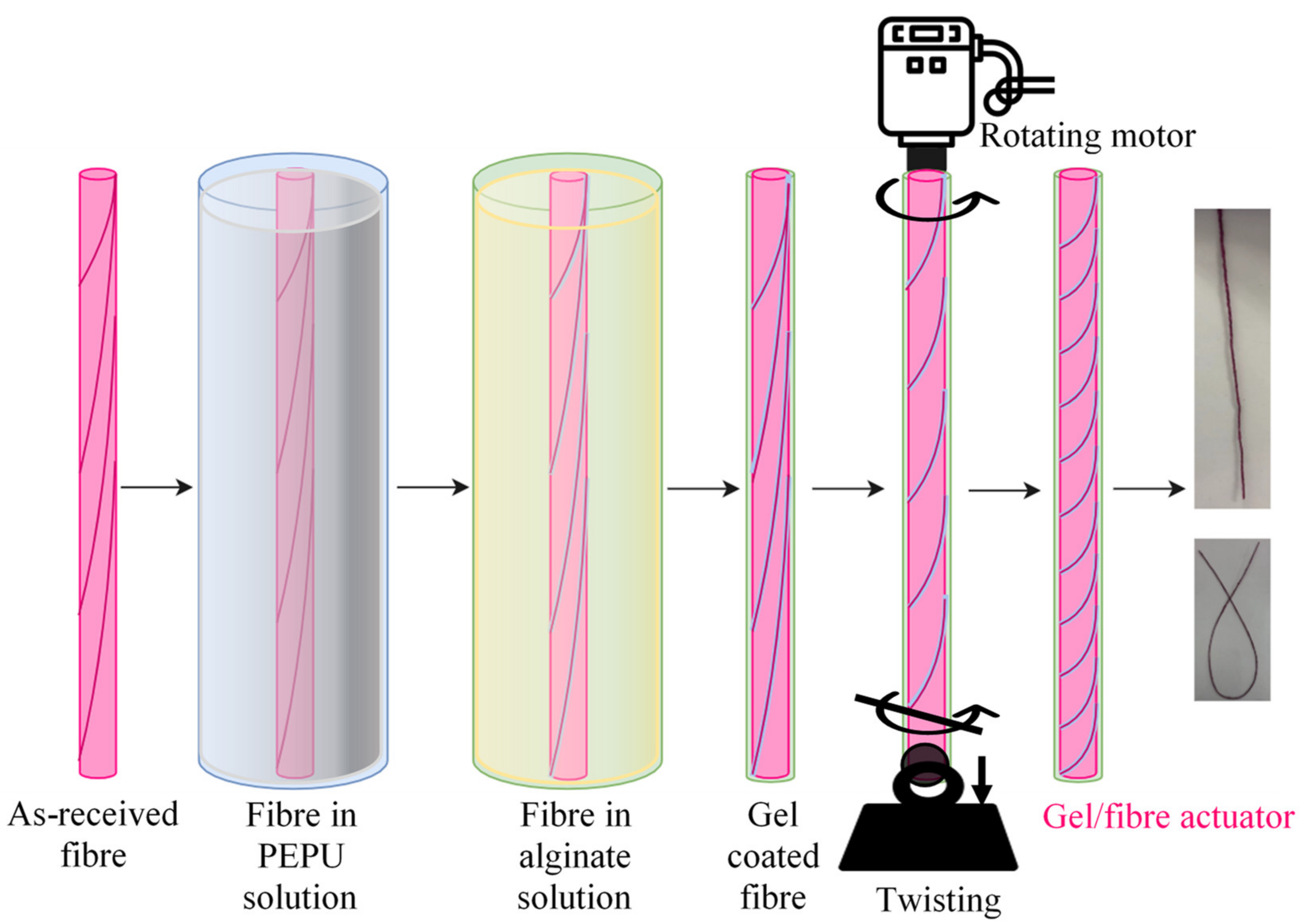
2.3. Fabrication and Characterisation of Gel/Fibre Actuator
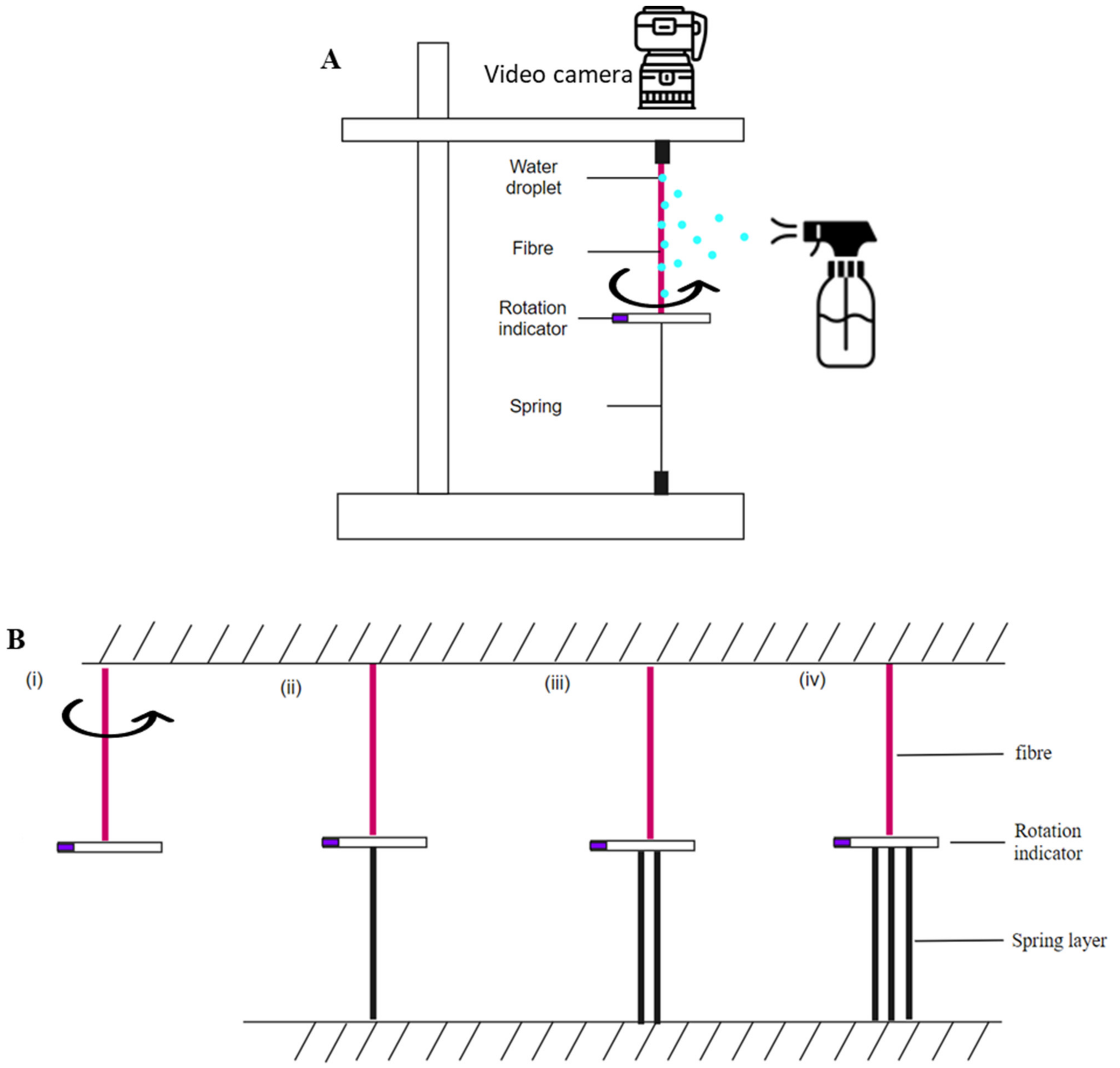
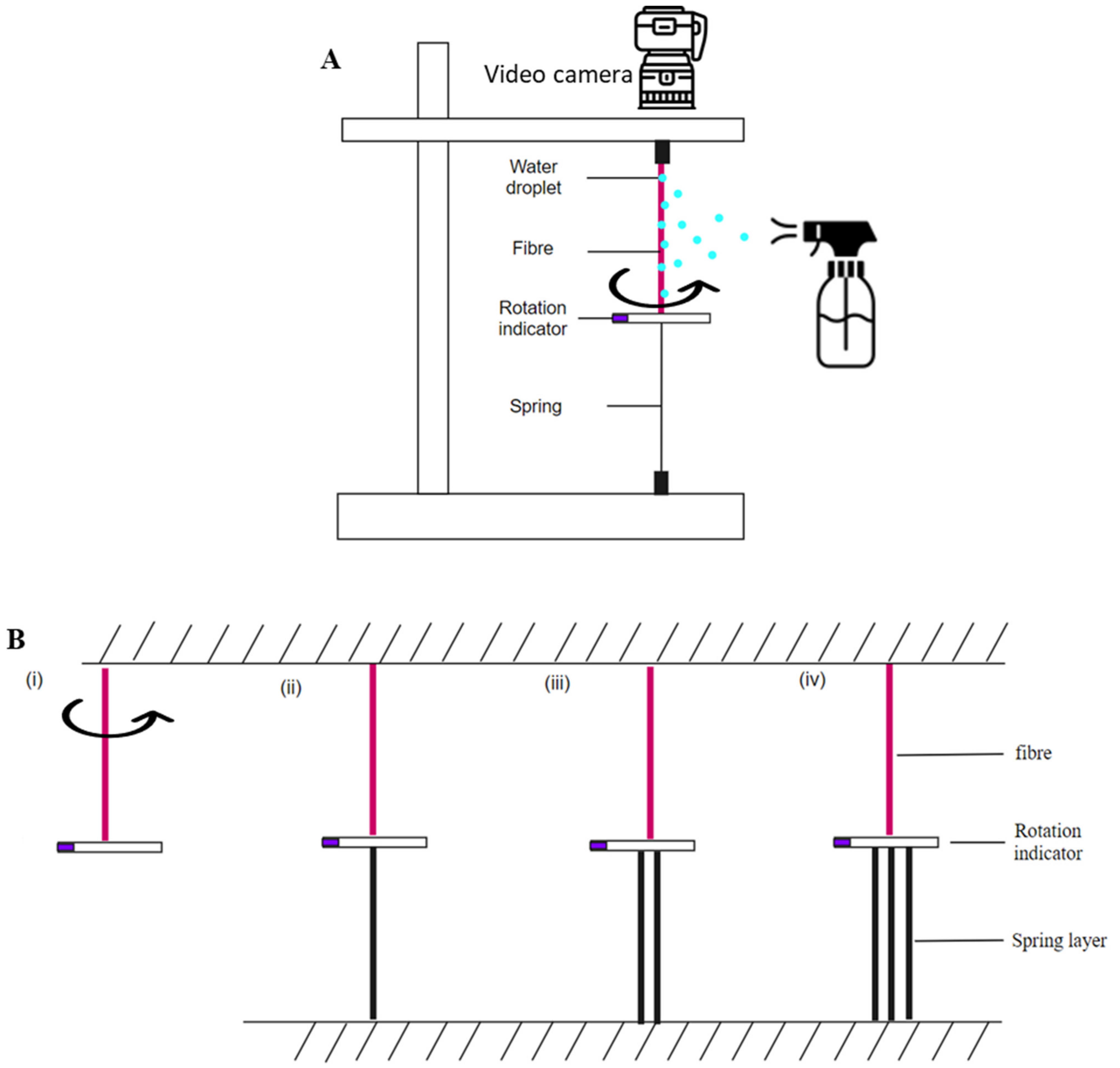
2.4. Actuation Test Method
2.5. Method of Predicting Torsional Actuation
3. Results and Discussion
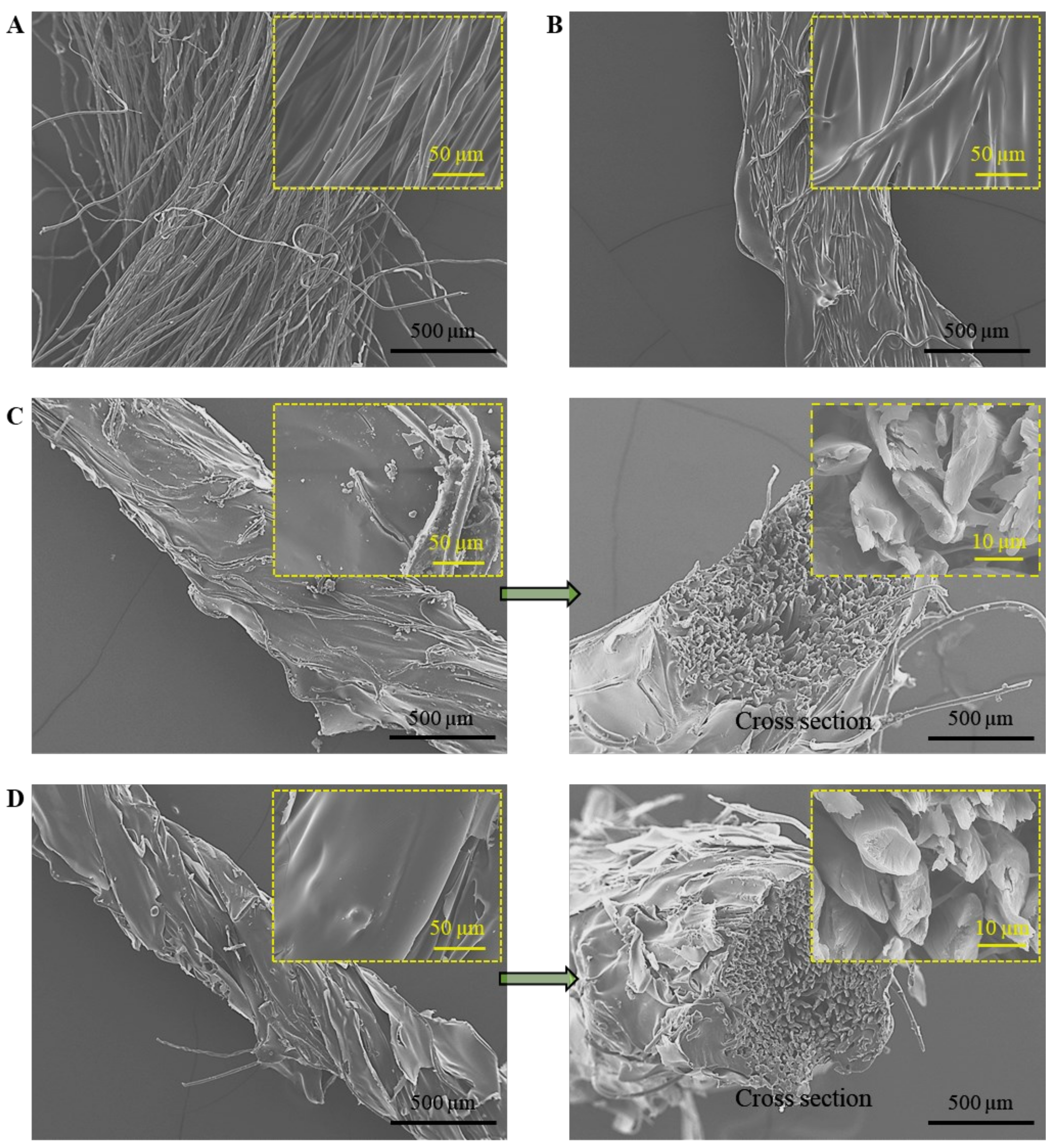
3.1. Morphology of Gel/Fibre Actuator
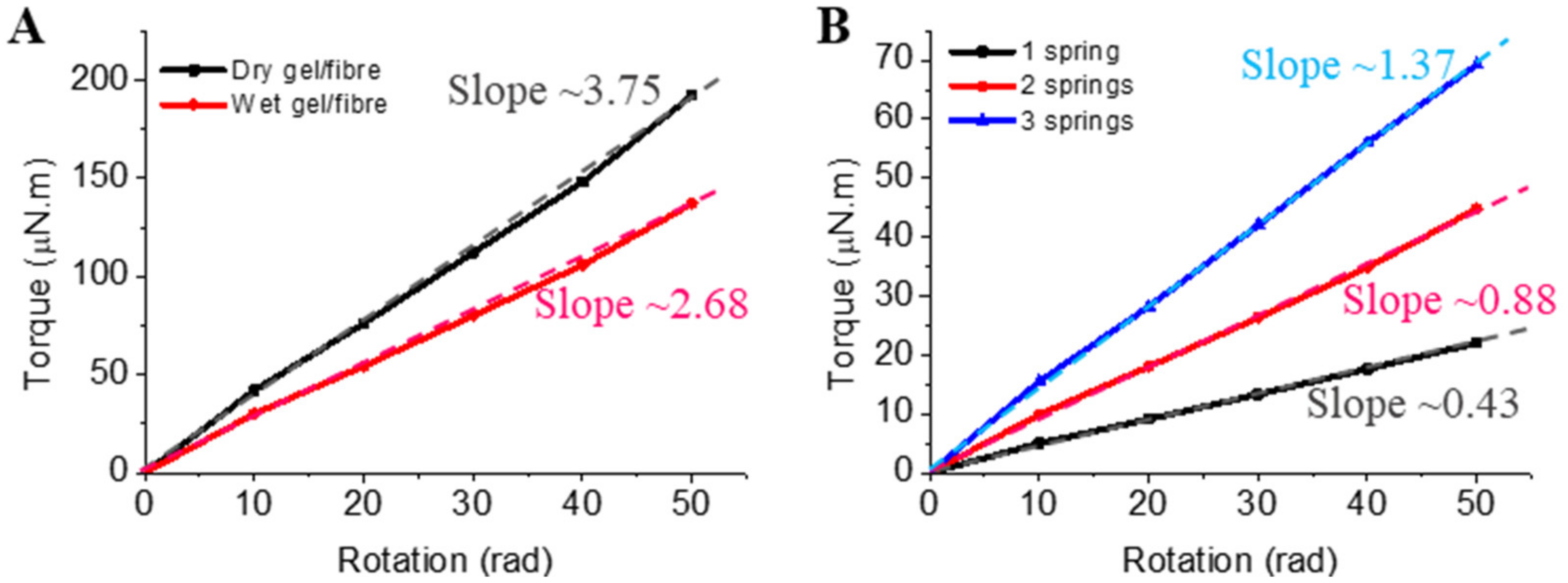
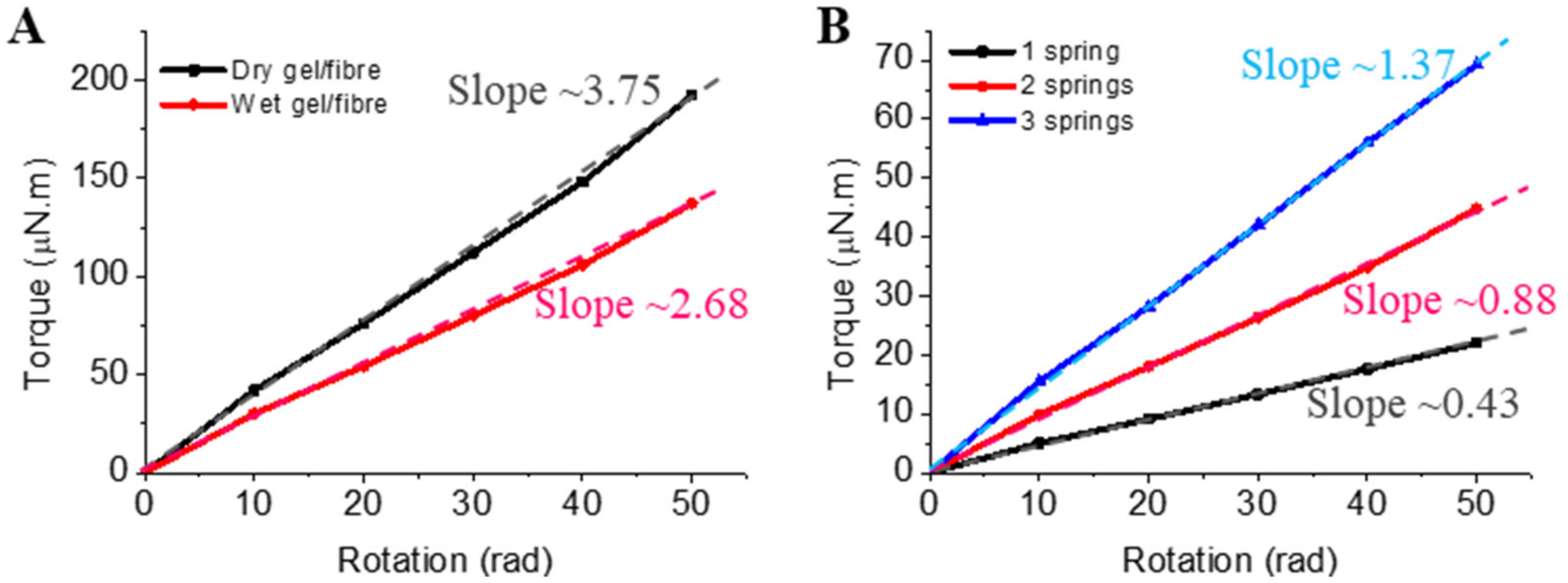
3.2. Torsional Stiffness
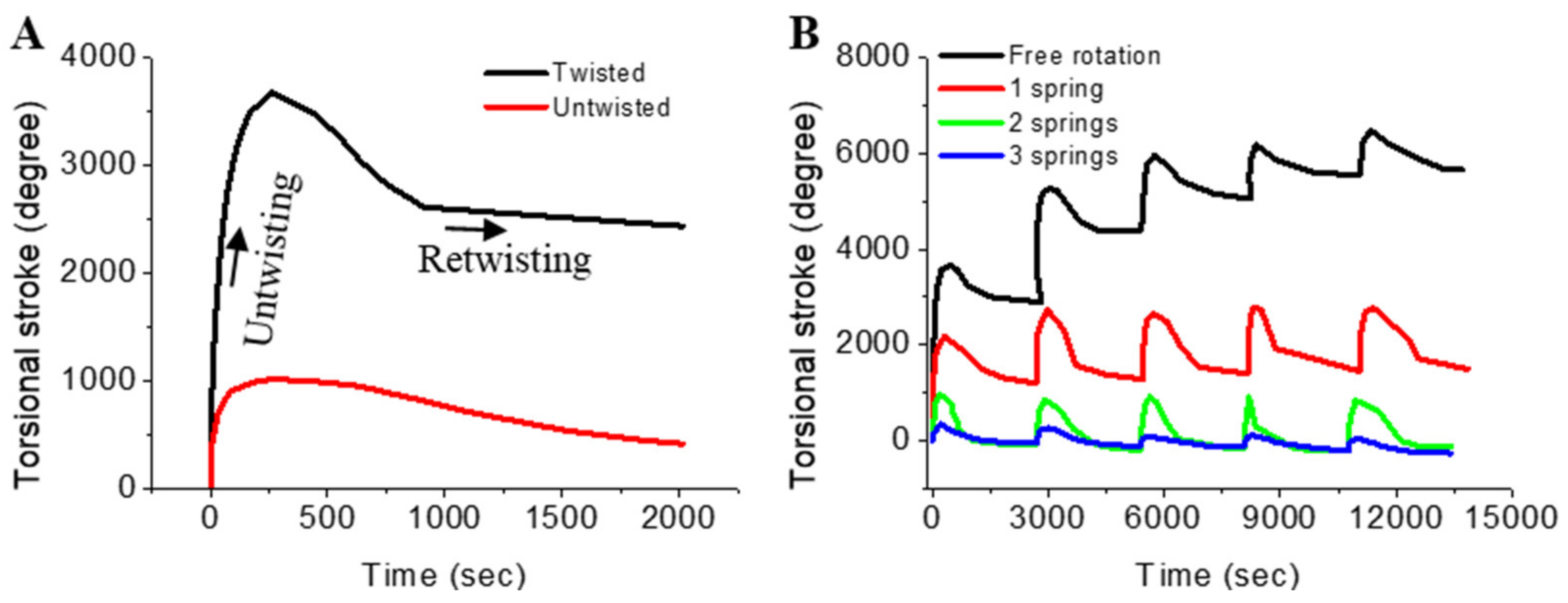
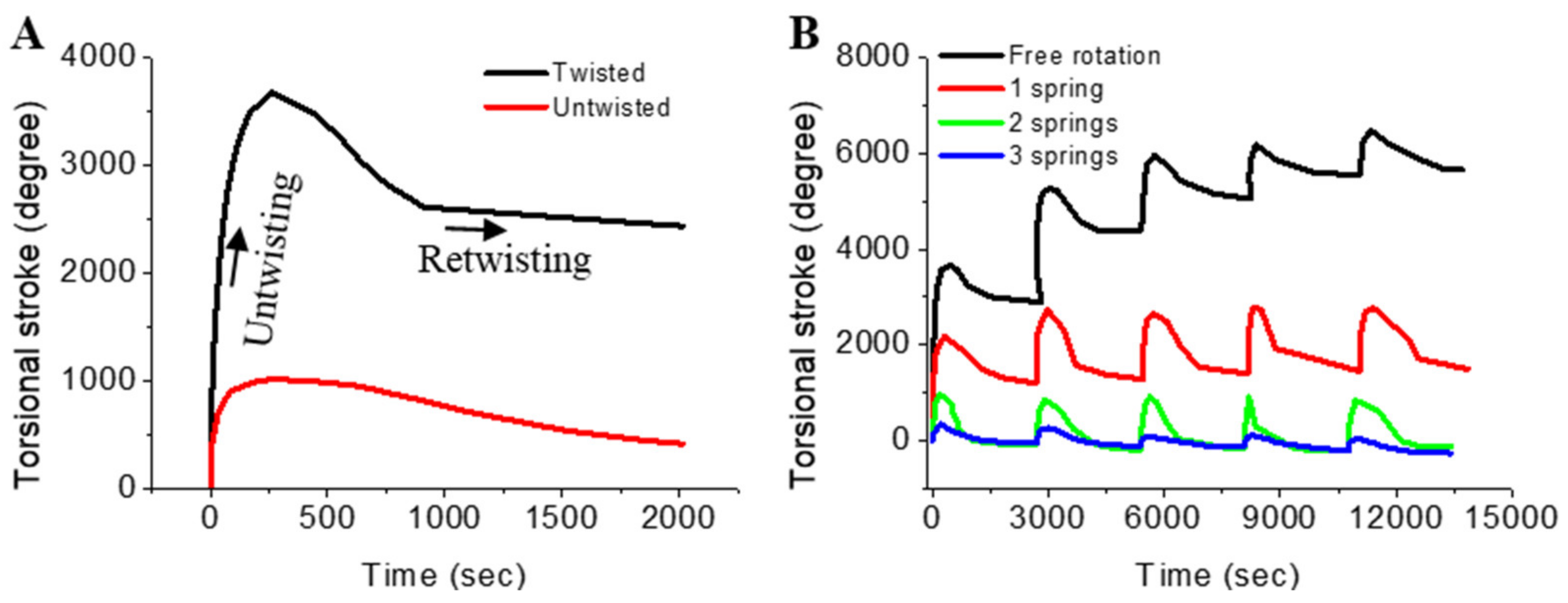
3.3. Torsional Actuation Test Results
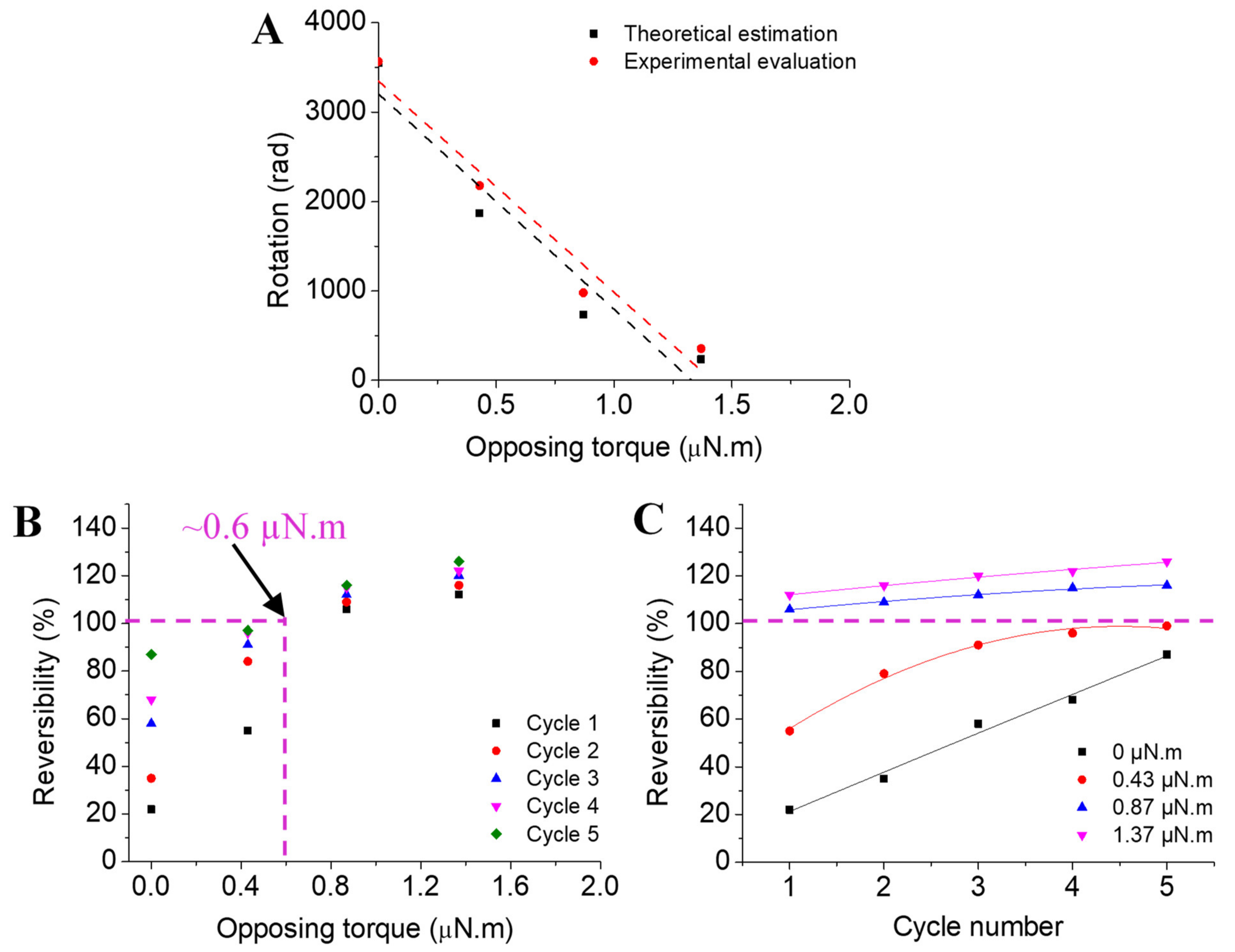
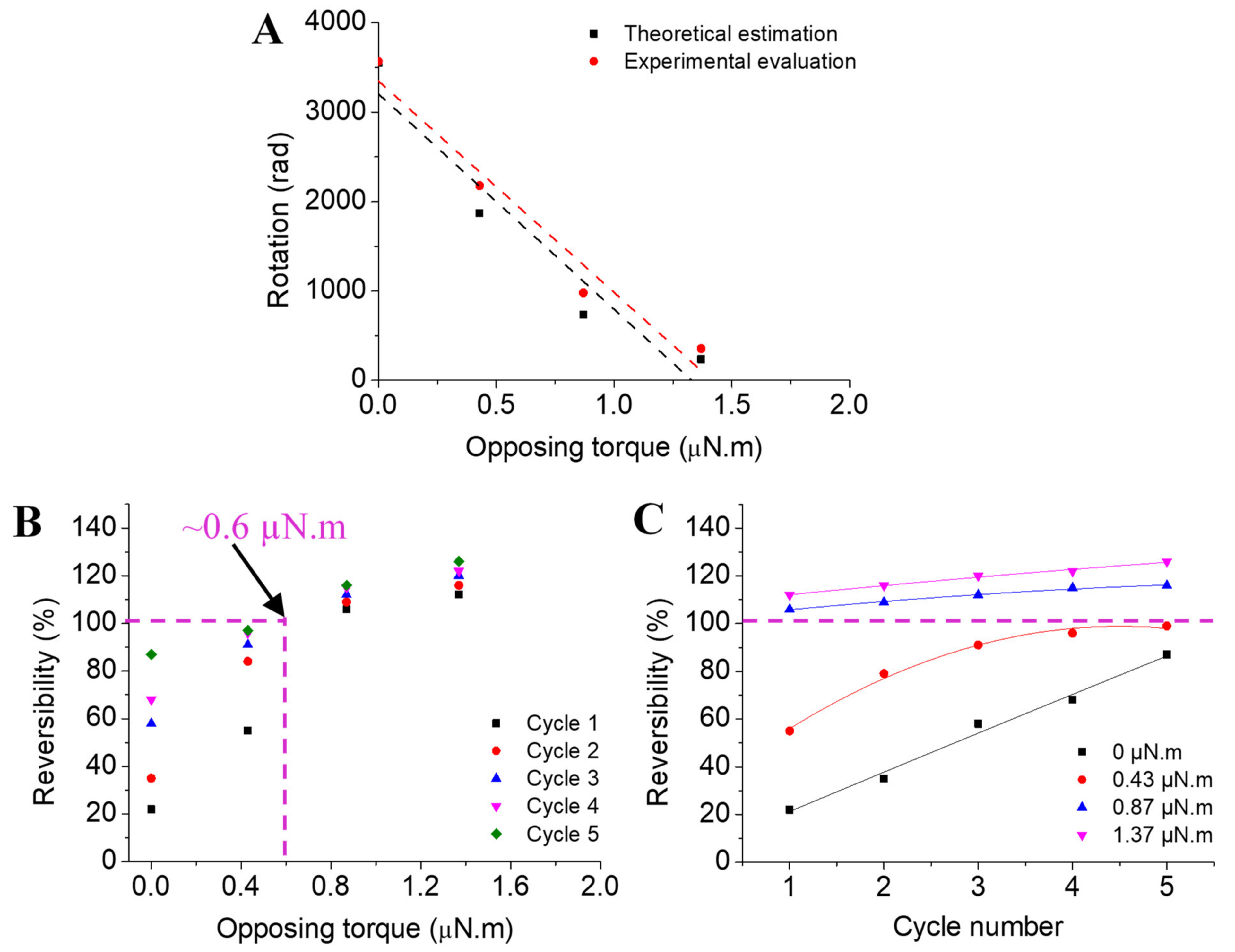
3.4. Theoretical Prediction of Torsional Actuation
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stuart, M.A.C.; Huck, W.T.S.; Genzer, J.; Müller, M.; Ober, C.; Stamm, M.; Sukhorukov, G.B.; Szleifer, I.; Tsukruk, V.V.; Urban, M.; et al. Emerging applications of stimuli-responsive polymer materials. Nat. Mater. 2010, 9, 101–113. [Google Scholar] [CrossRef]
- De Espinosa, L.M.; Meesorn, W.; Moatsou, D.; Weder, C. Bioinspired Polymer Systems with Stimuli-Responsive Mechanical Properties. Chem. Rev. 2017, 117, 12851–12892. [Google Scholar] [CrossRef]
- El-Atab, N.; Mishra, R.B.; Al-Modaf, F.; Joharji, L.; Alsharif, A.A.; Alamoudi, H.; Diaz, M.; Qaiser, N.; Hussain, M.M. Soft Actuators for Soft Robotic Applications: A Review. Adv. Intell. Syst. 2020, 2, 2000128. [Google Scholar] [CrossRef]
- Miriyev, A. A Focus on Soft Actuation. Actuators 2019, 8, 74. [Google Scholar] [CrossRef] [Green Version]
- Ariano, P.; Accardo, D.; Lombardi, M.; Bocchini, S.; Draghi, L.; De Nardo, L.; Fino, P. Polymeric materials as artificial muscles: An overview. J. Appl. Biomater. Funct. Mater. 2015, 13, 1–9. [Google Scholar] [CrossRef]
- Wang, J.; Gao, D.; Lee, P.S. Recent Progress in Artificial Muscles for Interactive Soft Robotics. Adv. Mater. 2021, 33, 2003088. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.; Ikeda, T. Soft actuators based on liquid-crystalline elastomers. Angew. Chem. Int. Ed. 2006, 45, 5416–5418. [Google Scholar] [CrossRef] [PubMed]
- Aziz, S.; Martinez, J.G.; Salahuddin, B.; Persson, N.K.; Jager, E.W. Fast and High-Strain Electrochemically Driven Yarn Actuators in Twisted and Coiled Configurations. Adv. Funct. Mater. 2020, 31, 2008959. [Google Scholar] [CrossRef]
- Aziz, S.; Martinez, J.G.; Foroughi, J.; Spinks, G.M.; Jager, E.W. Artificial Muscles from Hybrid Carbon Nanotube-Polypyrrole-Coated Twisted and Coiled Yarns. Macromol. Mater. Eng. 2020, 305, 2000421. [Google Scholar] [CrossRef]
- Foroughi, J.; Spinks, G.M.; Aziz, S.; Mirabedini, A.; Jeiranikhameneh, A.; Wallace, G.G.; Kozlov, M.E.; Baughman, R.H. Knitted carbon-nanotube-sheath/spandex-core elastomeric yarns for artificial muscles and strain sensing. ACS Nano 2016, 10, 9129–9135. [Google Scholar] [CrossRef]
- Piao, C.; Jang, H.; Lim, T.; Kim, H.; Choi, H.R.; Hao, Y.; Suk, J.W. Enhanced dynamic performance of twisted and coiled soft actuators using graphene coating. Compos. Part B Eng. 2019, 178, 107499. [Google Scholar] [CrossRef]
- Aziz, S.; Villacorta, B.; Naficy, S.; Salahuddin, B.; Gao, S.; Baigh, T.A.; Sangian, D.; Zhu, Z. A microwave powered polymeric artificial muscle. Appl. Mater. Today 2021, 23, 101021. [Google Scholar] [CrossRef]
- Salahuddin, B.; Warren, H.; Spinks, G.M. Thermally actuated hydrogel bead based braided artificial muscle. Smart Mater. Struct. 2020, 29, 055042. [Google Scholar] [CrossRef]
- Ding, M.; Jing, L.; Yang, H.; Machnicki, C.E.; Fu, X.; Li, K.; Wong, I.; Chen, P.-Y. Multifunctional soft machines based on stimuli-responsive hydrogels: From freestanding hydrogels to smart integrated systems. Mater. Today Adv. 2020, 8, 100088. [Google Scholar] [CrossRef]
- Park, N.; Kim, J. Hydrogel-Based Artificial Muscles: Overview and Recent Progress. Adv. Intell. Syst. 2020, 2, 1900135. [Google Scholar] [CrossRef] [Green Version]
- Aziz, S.; Spinks, G.M. Torsional artificial muscles. Mater. Horiz. 2019, 7, 667–693. [Google Scholar] [CrossRef]
- Ionov, L. Hydrogel-based actuators: Possibilities and limitations. Mater. Today 2014, 17, 494–503. [Google Scholar] [CrossRef]
- Mirabedini, A.; Aziz, S.; Spinks, G.M.; Foroughi, J. Wet-spun biofiber for torsional artificial muscles. Soft Robot. 2017, 4, 421–430. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, H.; Hu, Y.; Zhao, F.; Dong, Z.; Wang, Y.; Chen, N.; Zhang, Z.; Qu, L. Moisture-activated torsional graphene-fiber motor. Adv. Mater. 2014, 26, 2909–2913. [Google Scholar] [CrossRef] [PubMed]
- An, Y.; Gao, L.; Wang, T. Graphene Oxide/Alginate Hydrogel Fibers with Hierarchically Arranged Helical Structures for Soft Actuator Application. ACS Appl. Nano Mater. 2020, 3, 5079–5087. [Google Scholar] [CrossRef]
- Foroughi, J.; Spinks, G.M.; Wallace, G.G.; Oh, J.; Kozlov, M.E.; Fang, S.; Mirfakhrai, T.; Madden, J.D.W.; Shin, M.K.; Kim, S.J.; et al. Torsional carbon nanotube artificial muscles. Science 2011, 334, 494–497. [Google Scholar] [CrossRef] [PubMed]
- Voo, W.-P.; Ooi, C.-W.; Islam, A.; Tey, B.-T.; Chan, E.-S. Calcium alginate hydrogel beads with high stiffness and extended dissolution behaviour. Eur. Polym. J. 2016, 75, 343–353. [Google Scholar] [CrossRef]
- Liu, C.; Liu, Y.-C.; Kao, Y.-C.; Shiang, T.-Y. Effects of training with a dynamic moment of inertia bat on swing performance. J. Strength Cond. Res. 2011, 25, 2999–3005. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aziz, S.; Naficy, S.; Foroughi, J.; Brown, H.R.; Spinks, G.M. Twist-coil coupling fibres for high stroke tensile artificial muscles. Sens. Actuators A Phys. 2018, 283, 98–106. [Google Scholar] [CrossRef]
- Buckner, T.L.; Kramer-Bottiglio, R. Functional fibers for robotic fabrics. Multifunct. Mater. 2018, 1, 012001. [Google Scholar] [CrossRef]
- Haines, C.S.; Li, N.; Spinks, G.M.; Aliev, A.E.; Di, J.; Baughman, R.H. New twist on artificial muscles. Proc. Natl. Acad. Sci. USA 2016, 113, 11709–11716. [Google Scholar] [CrossRef] [Green Version]
- Aziz, S.; Naficy, S.; Foroughi, J.; Brown, H.R.; Spinks, G.M. Characterisation of torsional actuation in highly twisted yarns and fibres. Polym. Test. 2015, 46, 88–97. [Google Scholar] [CrossRef] [Green Version]
- Aziz, S.; Naficy, S.; Foroughi, J.; Brown, H.R.; Spinks, G.M. Controlled and scalable torsional actuation of twisted nylon 6 fiber. J. Polym. Sci. B Polym. Phys. 2016, 54, 1278–1286. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Xia, Y.; Zhang, X.; Lin, X.; Wang, L. Design of mechanically strong and tough alginate hydrogels based on a soft-brittle transition. Int. J. Biol. Macromol. 2019, 139, 850–857. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Zhu, Z. Flexible actuators. In Handbook of Smart Textiles; Springer: Singapore, 2015; pp. 381–410. [Google Scholar]
- Maziz, A.; Concas, A.; Khaldi, A.; Stålhand, J.; Persson, N.-K.; Jager, E.W.H. Knitting and weaving artificial muscles. Sci. Adv. 2017, 3, e1600327. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Wu, Y.; Li, C.; Yang, X.; Chen, W. Flexible actuators for soft robotics. Adv. Intell. Syst. 2019, 2, 1900077. [Google Scholar] [CrossRef] [Green Version]
- Walker, J.; Zidek, T.; Harbel, C.; Yoon, S.; Strickland, F.S.; Kumar, S.; Shin, M. Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators. Actuators 2020, 9, 3. [Google Scholar] [CrossRef] [Green Version]
- Spinks, G.M.; Campbell, T.E.; Wallace, G.G. Force generation from polypyrrole actuators. Smart Mater. Struct. 2005, 14, 406–412. [Google Scholar] [CrossRef] [Green Version]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Zhang, J.; Salahuddin, B.; Gao, S.; Aziz, S.; Zhu, Z. Reversible Torsional Actuation of Hydrogel Filled Multifilament Fibre Actuator. Actuators 2021, 10, 244. https://doi.org/10.3390/act10090244
Zhang X, Zhang J, Salahuddin B, Gao S, Aziz S, Zhu Z. Reversible Torsional Actuation of Hydrogel Filled Multifilament Fibre Actuator. Actuators. 2021; 10(9):244. https://doi.org/10.3390/act10090244
Chicago/Turabian StyleZhang, Xi, Jinxuan Zhang, Bidita Salahuddin, Shuai Gao, Shazed Aziz, and Zhonghua Zhu. 2021. "Reversible Torsional Actuation of Hydrogel Filled Multifilament Fibre Actuator" Actuators 10, no. 9: 244. https://doi.org/10.3390/act10090244
APA StyleZhang, X., Zhang, J., Salahuddin, B., Gao, S., Aziz, S., & Zhu, Z. (2021). Reversible Torsional Actuation of Hydrogel Filled Multifilament Fibre Actuator. Actuators, 10(9), 244. https://doi.org/10.3390/act10090244