
Predefined-Time Control of Full-Scale 4D Model of Permanent-Magnet Synchronous Motor with Deterministic Disturbances and Stochastic Noises


Abstract
:1. Introduction
2. Problem Statement
2.1. Predefined-Time Convergence
- The system (1) is only affected by a deterministic disturbance—that is, . The predefined-time convergence is introduced for a deterministic system.Definition 1. Predefined-time convergence for a deterministic systemThe system (1) is called predefined-time convergent to the origin, if
- (a)
- It is fixed-time convergent to the origin, i.e., for any initial state , there exists a positive constant , independent of , such that .
- (b)
- is independent of any initial conditions and disturbances and can be arbitrarily chosen in advance.
- (c)
- , where is the true convergence time.
- The system (1) is affected by a deterministic disturbance and a stochastic noise—that is, . The predefined-time convergence is introduced for a stochastic system.Definition 2. Predefined-time convergence for a stochastic systemThe system (1) is called predefined-time convergent to the origin in ρ-mean, if
- (a)
- It is fixed-time convergent to the origin in ρ-mean, i.e., for any initial state , there exists a positive constant , independent of , such that , .
- (b)
- is independent of any initial conditions and disturbances and can be arbitrarily chosen in advance.
- (c)
- , where is the true convergence time.
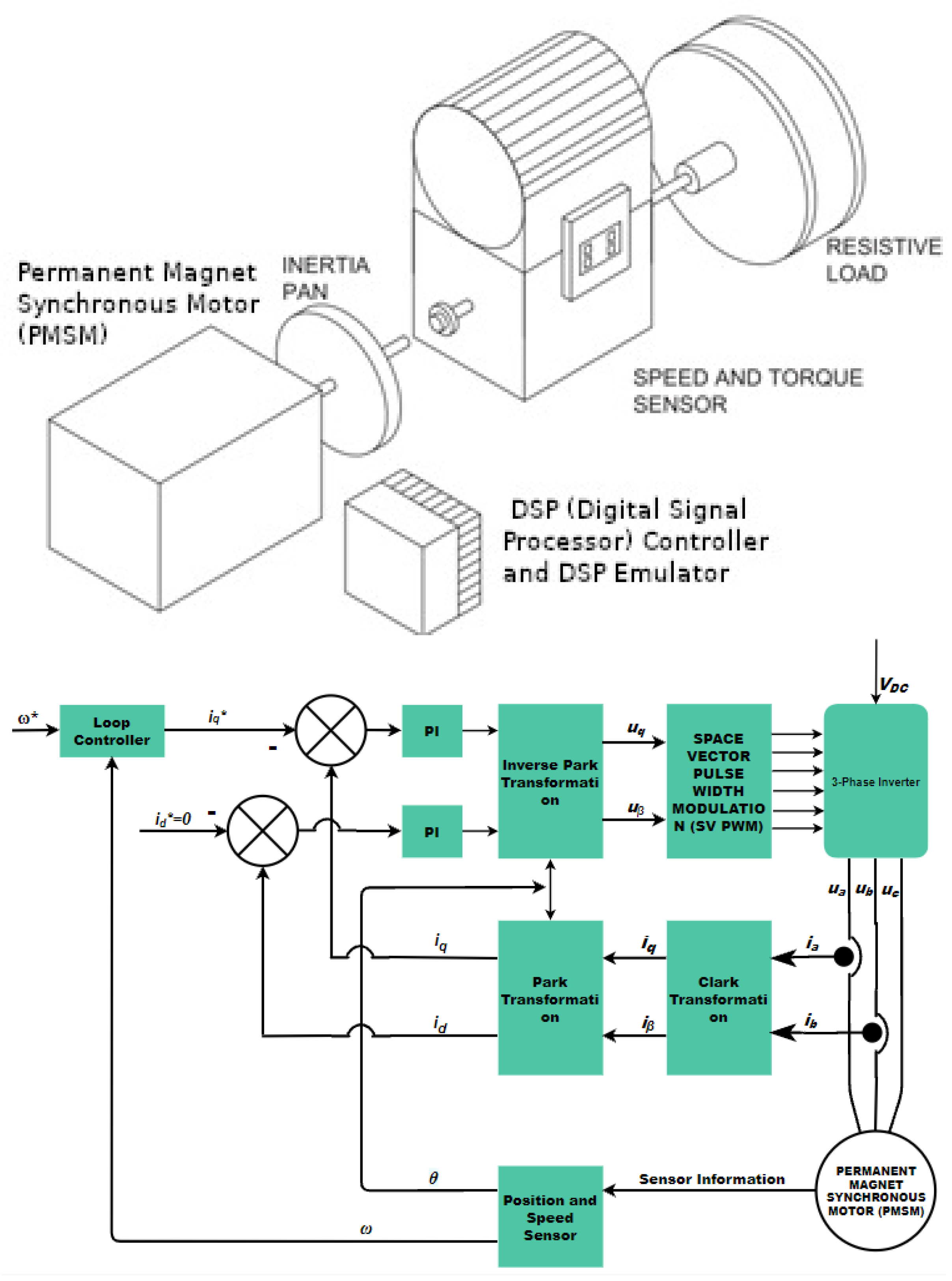
2.2. PMSM Predefined-Time Stabilization Problem
- The system (4) is not affected by any disturbance or noise; however, only the state variable can be measured. In this case, a predefined-time convergent observer must be employed to reconstruct the other three state variables.
- The system (4) is affected by a deterministic disturbance, and only the state variable can be measured. In this case, a predefined-time convergent compensator must be employed to estimate the disturbance.
- The system (4) is affected by a deterministic disturbance and a stochastic noise, and only the state variable can be measured. In this case, a predefined-time convergent control law must be specialized for stochastic systems.
3. PMSM Predefined-Time Stabilization for Completely Measured States
3.1. Control Design
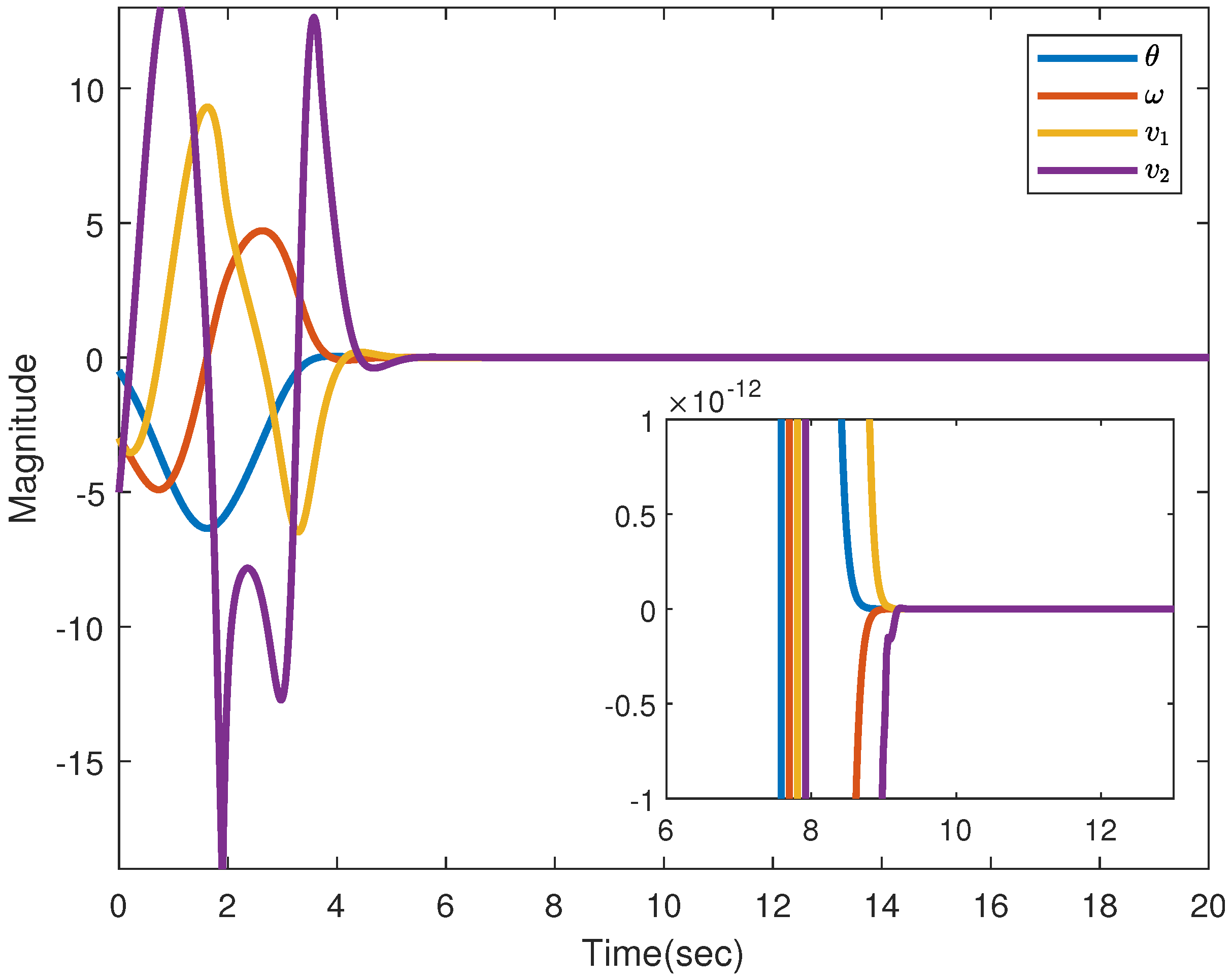
3.2. PMSM Simulations
4. PMSM Predefined-Time Stabilization for Incompletely Measured States
4.1. Observer Design
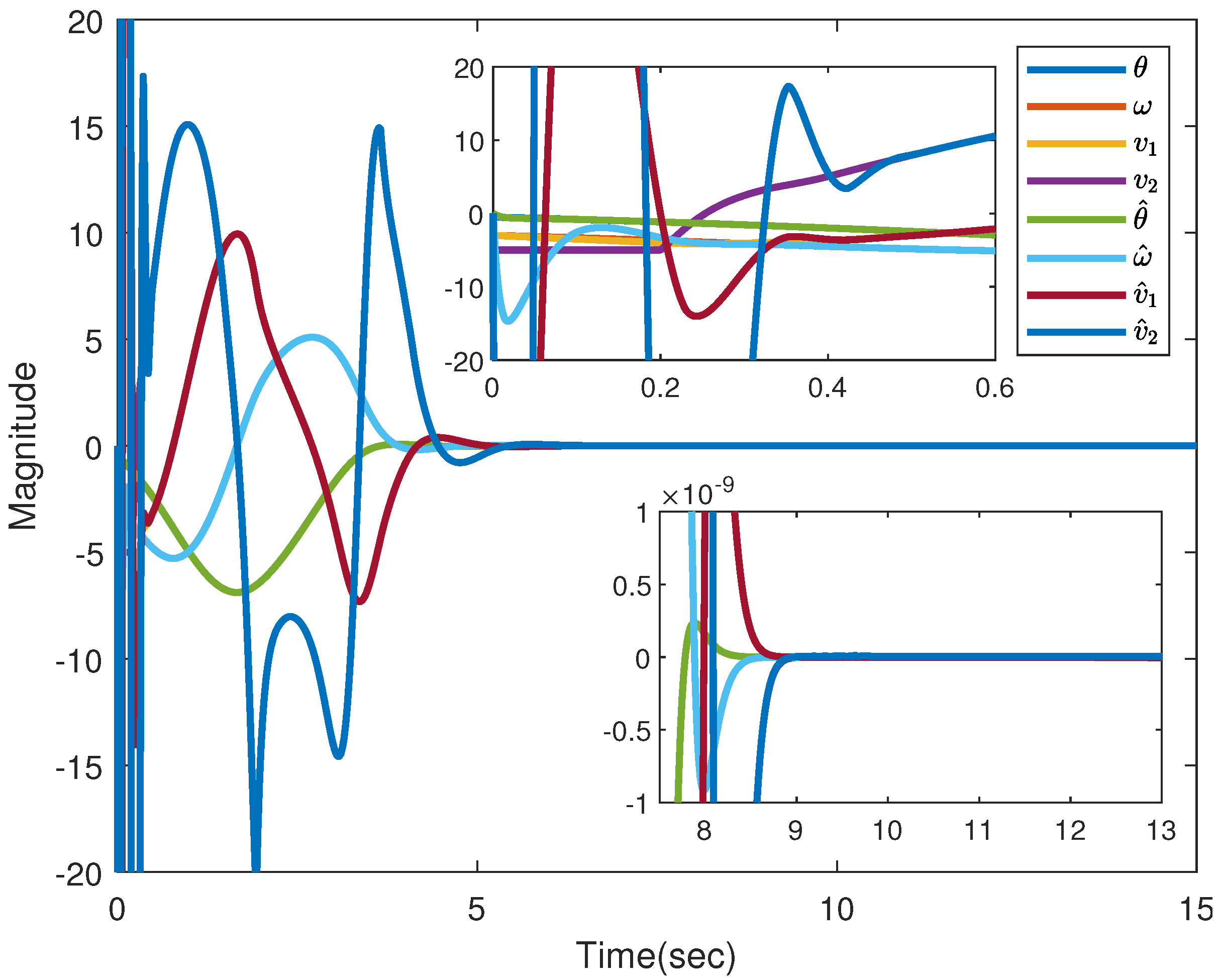
4.2. PMSM Simulations
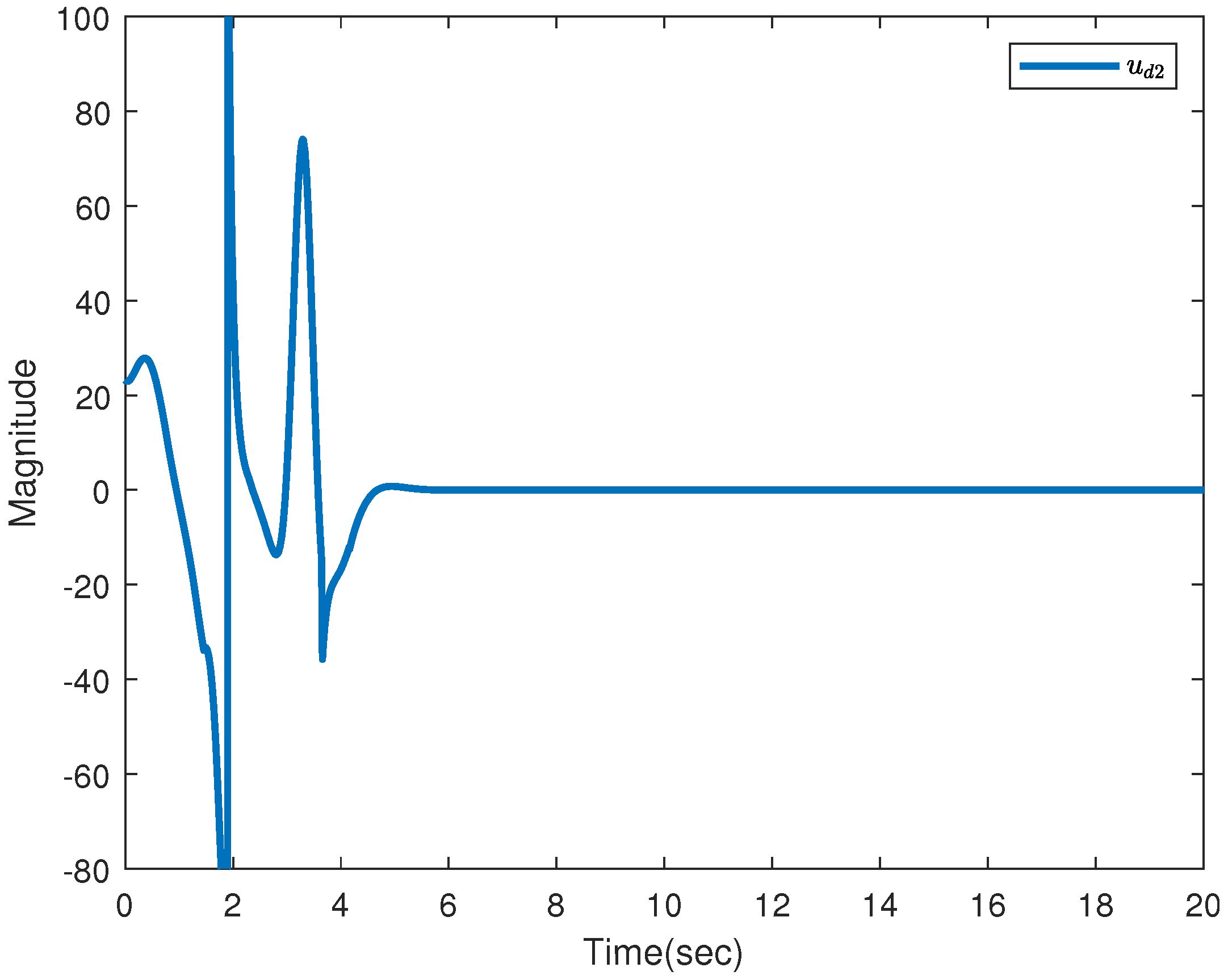
5. PMSM Predefined-Time Stabilization for Incompletely Measured States with Deterministic Disturbances
5.1. Control Design
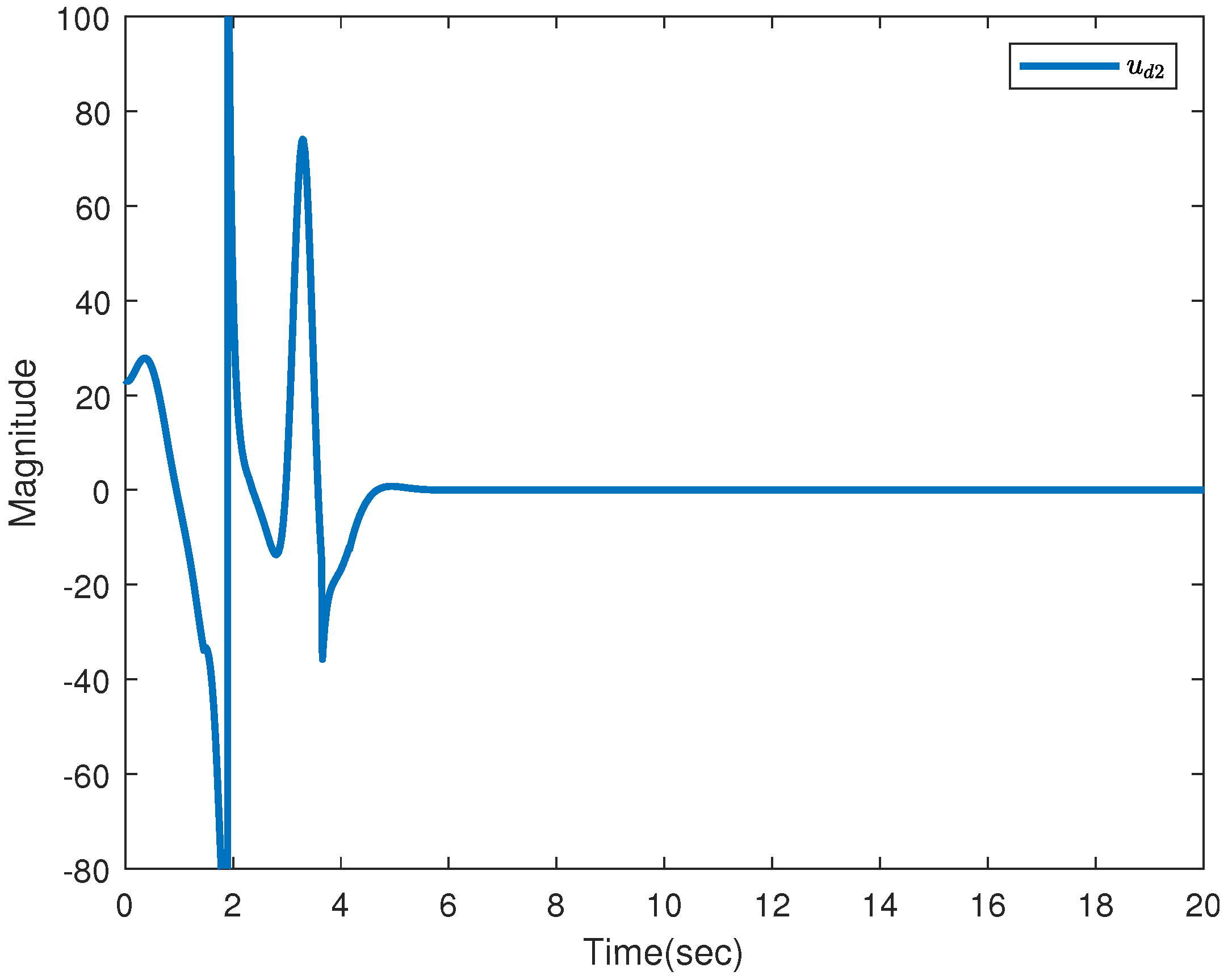
5.2. PMSM Simulations
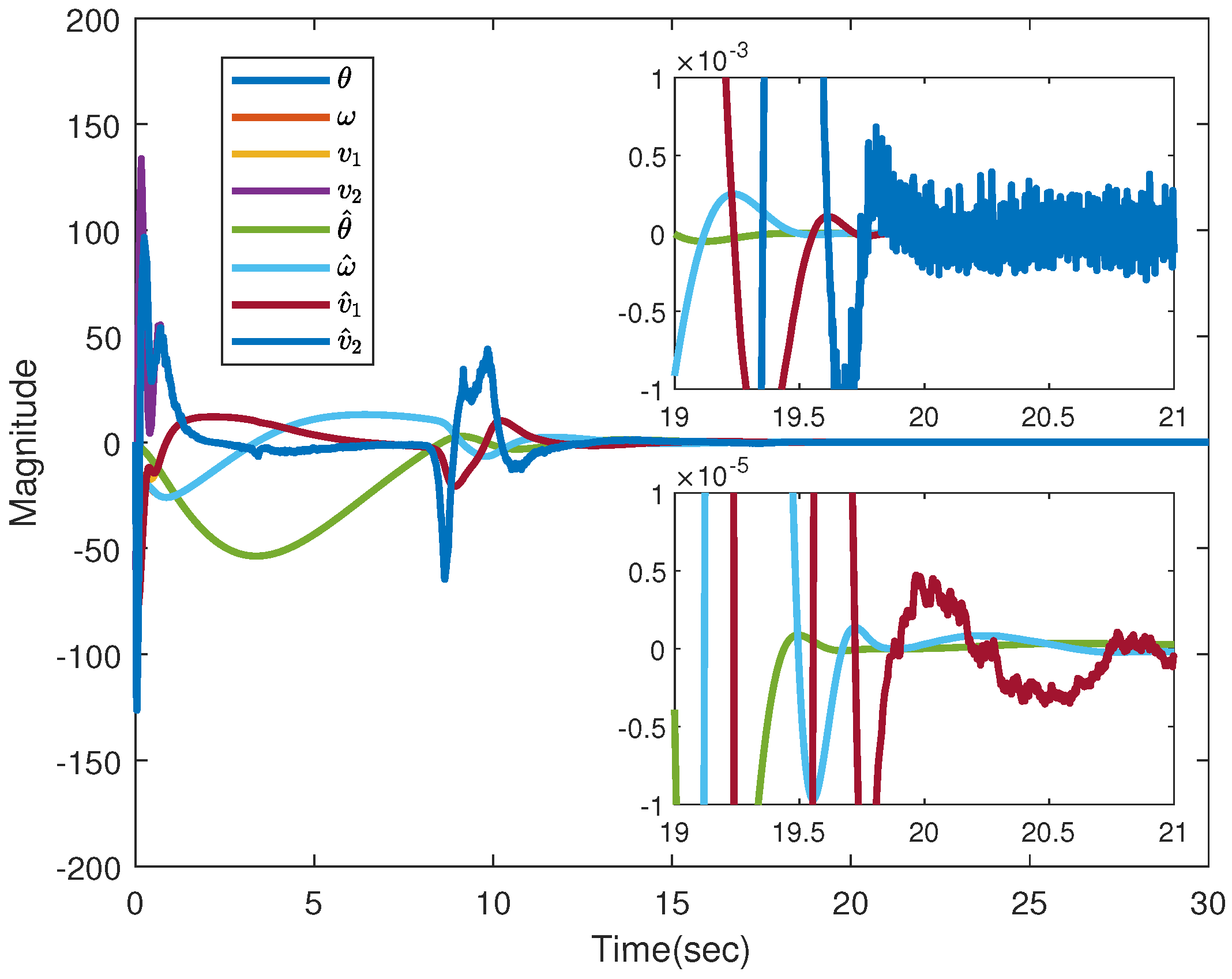
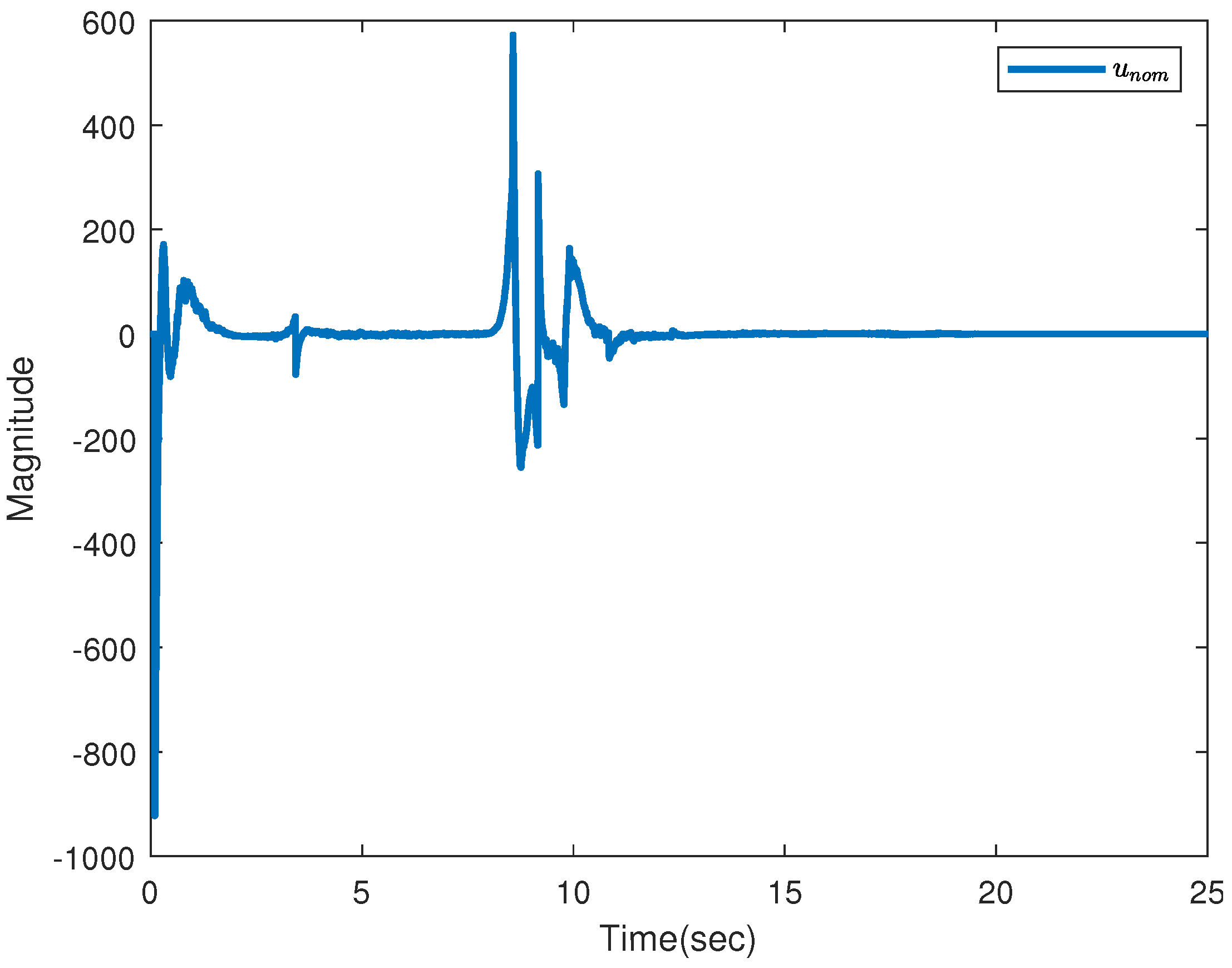
6. PMSM Predefined-Time Stabilization with Incompletely Measured States with Deterministic Disturbances and Stochastic Noises
6.1. Control Design
6.2. PMSM Simulations
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Lu, W.; Liu, X.; Chen, T. A note on finite-time and fixed-time stability. Neural Netw. 2016, 81, 11–15. [Google Scholar] [CrossRef] [Green Version]
- Sánchez-Torres, J.D.; Gómez-Gutiérrez, D.; López, E.; Loukianov, A.G. A class of predefined-time stable dynamical systems. IMA J. Math. Control Inf. 2018, 35, I1–I29. [Google Scholar] [CrossRef] [Green Version]
- Polyakov, A.; Efimov, D.; Perruquetti, W. Finite-time and fixed-time stabilization: Implicit Lyapunov function approach. Automatica 2015, 51, 332–340. [Google Scholar] [CrossRef] [Green Version]
- Polyakov, A. Characterization of finite/fixed-time stability of evolution inclusions. In Proceedings of the 2019 IEEE 58th Conference on Decision and Control (CDC), Nice, France, 11–13 December 2020; pp. 4990–4995. [Google Scholar]
- Matsuoka, K. Development trend of the permanent-magnet synchronous motor for railway traction. IEEJ Trans. Electr. Electron. Eng. 2007, 2, 154–161. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, X. Permanent magnetic synchronous motor and drives applied on a mid-size hybrid electric car. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; pp. 1–5. [Google Scholar]
- Torrent, M.; Perat, J.I.; Jiménez, J.A. Permanent-magnet synchronous motor with different rotor structures for traction motor in high speed trains. Energies 2018, 11, 1549. [Google Scholar] [CrossRef] [Green Version]
- Staszak, J.; Ludwinek, K.; Gawecki, Z.; Kurkiewicz, J.; Bekier, T.; Jaskiewicz, M. Utilization of permanent-magnet synchronous motors in industrial robots. In Proceedings of the 2015 International Conference on Information and Digital Technologies, Zilina, Slovakia, 7–9 July 2015; pp. 342–347. [Google Scholar]
- Wu, X.; Zhang, B. Sensorless model reference adaptive control of permanent magnet synchronous motor for industrial robots. In Proceedings of the 2019 8th International Symposium on Next Generation Electronics (ISNE), Zhengzhou, China, 9–10 October 2019; pp. 2019–2021. [Google Scholar]
- Suti, A.; Rito, G.D.; Galatolo, R. Fault-tolerant control of a three-phase permanent magnet synchronous motor for lightweight UAV. Actuators 2021, 10, 253. [Google Scholar] [CrossRef]
- Zhao, Y.; Qiao, W.; Wu, L. Sensorless control for IPMSMs based on a multilayer discrete-time sliding-mode observer. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 1788–1795. [Google Scholar]
- Azzoug, Y.; Sahraoui, M.; Pusca, R.; Ameid, T.; Romary, R.; Cardoso, A.J. A Variable Speed Control of Permanent Magnet Synchronous Motor Without Current Sensors. In Proceedings of the 2020 IEEE 29th International Symposium on Industrial Electronics (ISIE), Delft, The Netherlands, 17–19 June 2020; pp. 1523–1528. [Google Scholar]
- Zhao, Y.; Qiao, W.; Wu, L. Improved Rotor Position and Speed Estimators for Sensorless Control of Interior Permanent-Magnet Synchronous Machines. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 627–639. [Google Scholar] [CrossRef]
- Awan, H.A.A.; Tuovinen, T.; Saarakkala, S.E.; Hinkkanen, M. Discrete-time observer design for sensorless synchronous motor drives. IEEE Trans. Ind. Appl. 2016, 52, 3968–3979. [Google Scholar] [CrossRef]
- Deo, H.V.; Shekokar, R.U. A review of speed control techniques using PMSM. Int. J. Innov. Res. Technol. 2014, 1, 2349–6002. [Google Scholar]
- Ren, Z.; Ma, J.; Qi, Y.; Zhang, D.; Koh, C.S. Managing uncertainties of permanent-magnet synchronous machine by adaptive Kriging assisted weight index Monte-Carlo simulation method. IEEE Trans. Energy Convers. 2020, 35, 2162–2169. [Google Scholar] [CrossRef]
- Basin, M.; Rodriguez-Ramirez, P.; Ramos-Lopez, V. Continuous fixed-time convergent controller for permanent-magnet synchronous motor with unbounded perturbations. J. Frankl. Inst. 2020, 357, 11900–11913. [Google Scholar] [CrossRef]
- Aguilar Mejía, O.; Tapia Olvera, R.; Rivas Cambero, I.; Minor Popocatl, H. Adaptive speed controller for a permanent-magnet synchronous motor. Nov. Sci. 2019, 11, 142–170. [Google Scholar] [CrossRef]
- Van, M.; Mavrovouniotis, M.; Ge, S.S. An adaptive backstepping nonsingular fast terminal sliding mode control for robust fault tolerant control of robot manipulators. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1448–1458. [Google Scholar] [CrossRef] [Green Version]
- Gao, S.; Wei, Y.; Zhang, D.; Qi, H.; Wei, Y. A modified model predictive torque control with parameters robustness improvement for PMSM of electric vehicles. Actuators 2021, 10, 132. [Google Scholar] [CrossRef]
- Lakhe, R.K.; Chaoui, H.; Alzayed, M.; Liu, S. Universal control of permanent magnet synchronous motors with uncertain dynamics. Actuators 2021, 10, 49. [Google Scholar] [CrossRef]
- Van, M.; Ge, S.S.; Ren, H. Finite-time fault tolerant control for robot manipulators using time delay estimation and continuous nonsingular fast terminal sliding mode control. IEEE Trans. Cybern. 2017, 47, 1681–1693. [Google Scholar] [CrossRef]
- Van, M. An enhanced robust fault tolerant control based on an adaptive fuzzy PID-nonsingular fast terminal sliding mode control for uncertain nonlinear systems. IEEE/ASME Trans. Mechatron. 2018, 23, 1362–1371. [Google Scholar] [CrossRef] [Green Version]
- Basin, M. Finite- and fixed-time convergent algorithms: Design and convergence time estimation. Annu. Rev. Control 2019, 48, 209–221. [Google Scholar] [CrossRef]
- Jiménez-Rodríguez, E.; Muñoz-Vázquez, A.J.; Sánchez-Torres, J.D.; Loukianov, A.G. A note on predefined-time stability. IFAC-PapersOnLine 2018, 51, 520–525. [Google Scholar] [CrossRef]
- Lopez-Ramirez, F.; Efimov, D.; Polyakov, A.; Perruquetti, W. On necessary and sufficient conditions for fixed-time stability of continuous autonomous systems. In Proceedings of the 2018 European Control Conference (ECC), Limassol, Cyprus, 12–15 June 2018; pp. 197–200. [Google Scholar]
- Pal, A.K.; Kamal, S.; Nagar, S.K.; Bandyopadhyay, B.; Fridman, L. Design of controllers with arbitrary convergence time. Automatica 2020, 112, 108710. [Google Scholar] [CrossRef]
- Jimenez-Rodriguez, E.; Sanchez-Torres, J.D.; Loukianov, A.G. Backstepping design for the predefined-time stabilization of second-order systems. In Proceedings of the 2019 16th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico, 11–13 September 2019; pp. 1–6. [Google Scholar]
- Garza-Alonso, A.; Basin, M.; Rodriguez-Ramirez, P. Predefined-time stabilization of permanent-magnet synchronous motor. Trans. Inst. Meas. Control 2021, 43, 3044–3054. [Google Scholar] [CrossRef]
- Wang, G.; Zhang, G.; Xu, D. Position Sensorless Control Techniques for Permanent Magnet Synchronous Machine Drives; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Levant, A. Homogeneity approach to high-order sliding mode design. Automatica 2005, 41, 823–830. [Google Scholar] [CrossRef]
- Ménard, T.; Moulay, E.; Perruquetti, W. Fixed-time observer with simple gains for uncertain systems. Automatica 2017, 81, 438–446. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value | Unit |
|---|---|---|
| 4 | ||
| J | ||
| 1 | ||
| 10 | ||
| Variable | Value | Unit |
|---|---|---|
| 20 | ||
| K | ||
| 10 | ||
| 50 | ||
| 1 | ||
| 445 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
de la Cruz, N.; Basin, M. Predefined-Time Control of Full-Scale 4D Model of Permanent-Magnet Synchronous Motor with Deterministic Disturbances and Stochastic Noises. Actuators 2021, 10, 306. https://doi.org/10.3390/act10110306
de la Cruz N, Basin M. Predefined-Time Control of Full-Scale 4D Model of Permanent-Magnet Synchronous Motor with Deterministic Disturbances and Stochastic Noises. Actuators. 2021; 10(11):306. https://doi.org/10.3390/act10110306
Chicago/Turabian Stylede la Cruz, Nain, and Michael Basin. 2021. "Predefined-Time Control of Full-Scale 4D Model of Permanent-Magnet Synchronous Motor with Deterministic Disturbances and Stochastic Noises" Actuators 10, no. 11: 306. https://doi.org/10.3390/act10110306
APA Stylede la Cruz, N., & Basin, M. (2021). Predefined-Time Control of Full-Scale 4D Model of Permanent-Magnet Synchronous Motor with Deterministic Disturbances and Stochastic Noises. Actuators, 10(11), 306. https://doi.org/10.3390/act10110306