1. Introduction
Wearable robotic exoskeletons have been extensively researched in the past decade. They play a vital role in assisting patients with mobility problems [
1]. Robotic exoskeletons are used in various joints of the body. The actuators of the exoskeleton can be designed and modified as per the location and mobility requirement of the body [
2]. The mechanical design of the exoskeleton can have multiple degrees of freedom (DOF) depending on the type of joint and comfort. They are classified based on the type of actuator used [
3]. The friction in the robotic exoskeletons is modeled to extend its use in stiffness applications [
4].
As humans grow older their body loses muscular strength which limits their mobility. To help them regain regular biomechanical functions, exoskeletons have been designed. It consists of a wearable frame, actuators, sensors, and a controller. People with knee joint problems cannot have desired mobility. To help them walk naturally knee orthosis device is used (Shiao et al., 2017) [
5]. It is a kind of exoskeleton with a similar design and used to support the lower limbs. Conventional knee orthosis (CKO) device assists the people facing problems with gait movement (Daniel S Pamungkas et al., 2019) [
6]. However, it cannot completely provide natural free knee movement. Active knee orthosis (AKO) devices help patients to walk more naturally. Beyl et al. [
7] introduced an adaptive knee orthosis device that uses an active electric motor. However, the drawbacks of AKO are its heavy mass, high power consumption, large volume, and high cost. It is used by people only with severe knee problems. Weinberg et al. [
8] proposed an Electrorheological (ER) resistance-based SAKO device. On the other hand, its applications are limited due to the high ER voltage limit and high mass. Recently, Shiao et al. (2021) [
9] introduced a SAKO device that uses a multilayer MR brake with high TVR, low mass, less volume.
MR brakes are promising smart devices in future prosthetic and knee applications. It provides variable torque and can be controlled with simple actuating signals such as pulse width modulation (PWM). The output torque of the MR brake is generally controlled by varying input current [
10]. A controllable fluid which is filled inside an MR brake has a special feature such as changing its rheological behavior in the presence of the magnetic field. Such fluid is called magnetorheological fluid (MRF). It was discovered by J. Rainbow in late 1940′s. The viscosity of MR fluid can be controlled by the applied controllable magnetic field [
11]. It is formed by mixing micron sized ferromagnetic particles with carrier fluid such as hydrocarbon oils and some additives. MR fluid can be operated in four modes: squeeze mode, pinch mode, direct-shear mode and valve mode [
12]. MR brakes are designed to use the third mode. This mode opposes the relative motion between two surfaces. In the presence of a magnetic field, these particles form a chain structure in the direction of magnetic field [
13]. It changes its state from low viscous fluid to a semi-solid substance. On the removal of external magnetic field MR fluid reverts to its original state in a few milliseconds.
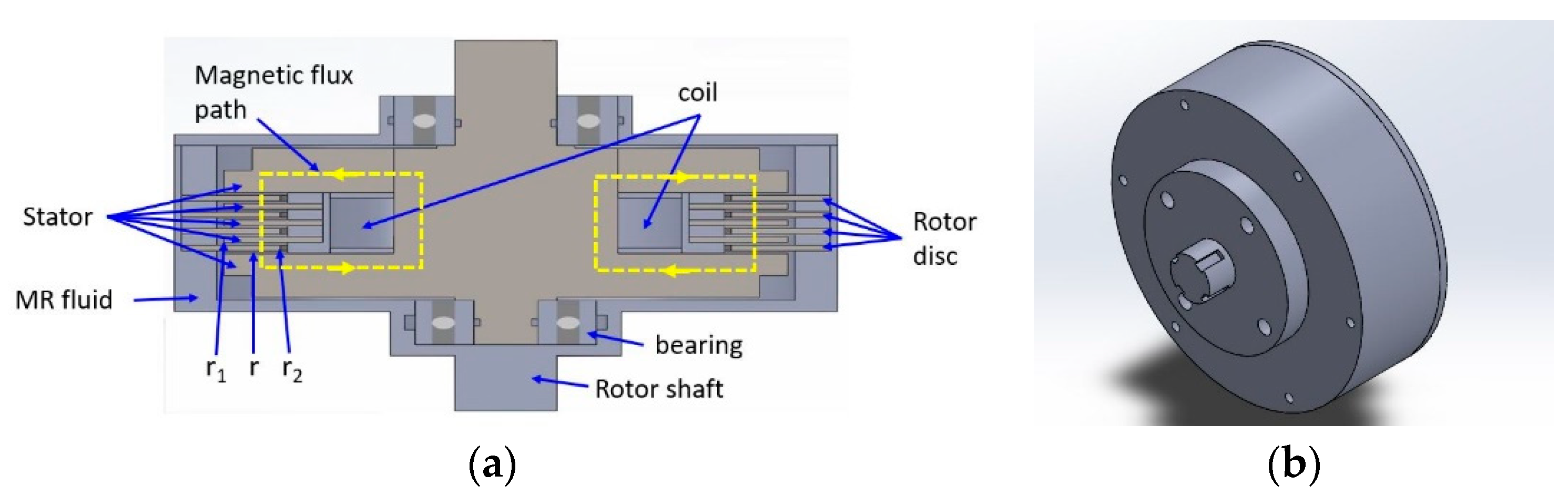
MR brake generally consists of an electromagnetic coil, rotating disc, and MR fluid. Whenever a current passes through the coil, it creates a magnetic field and the MR fluid state changes. This change results in more friction between the fluid and the rotating disc. The first commercial single-pole single-layer MR brake was designed by Lord company [
14]. In later years, Wang improved the torque of the MR brake by developing a single-pole multilayer MR brake [
15]. However, these designs did not improve the torque more effectively. In recent years, Shiao introduced a multipole multilayer MR brake which effectively used the magnetic field to obtain high torque [
16].
A challenging problem in this application issue is hysteresis which is one of the major topics investigated in this MR field. The hysteresis effect causes nonlinearity in the system. This problem is usually overcome by modeling hysteresis. From the literature survey, it is known that many theories are proposed in the past to put the hysteresis effect in ferromagnetic materials in dynamic models. In 1986, Jiles and Atherton proposed a model on the hysteresis effect in ferromagnetic materials based on domain wall motion [
17,
18]. It becomes one of the most widely used hysteresis models. The nonlinear behavior in the performance of MR devices is mainly due to the hysteresis effect. Li and Gong numerically simulated the Jiles Atherton model in Matlab/Simulink to describe the nonlinearity between the magnetic field intensity and the input current to the MR brake [
19].
Other studies used different approaches to eliminate the hysteresis in MR devices [
20,
21,
22]. To the best of our knowledge, most of the studies in past focused only on hysteresis elimination and its effect on the torque of MR brake. Most of these studies used the DC voltage control method to vary the corresponding current level and the torque of the MR brake. This method requires a continuous power supply to MR brake. Therefore, it consumes more power. A literature study found that driving the electromagnetic coils with the PWM signal improves the efficiency of coil power consumption [
23]. Thus, optimal design of magnetorheological devices can be achieved by the mechanical structure improvement and the design parameters of electrical and magnetic circuits [
24]. Besides this, none of the studies investigations can turn the hysteresis problem into an advantage in MR brakes. Hysteresis in some cases made useful for the storage of data in the hard disk.
In this paper, the hysteresis effect on torque performance of MR brake is investigated under PWM actuation signal. PWM signal drives an MR brake by chopping the input voltage and current at high frequencies. The coil inside an MR brake has self-inductance and the ferromagnetic core has a hysteresis effect. By making use of these two effects and selecting PWM as an actuation signal, the power consumption of the MR brake can be significantly reduced. In addition to this, the effect of frequency and duty cycle on the torque performance of MR brake is also studied. Investigation in this research revealed that the response time of MR brake depends on parameters such as time constant (T
c) and reluctance (S) in the electrical and magnetic circuit. The MR fluid filled inside this MR brake is MRF 140-CG which was manufactured by Lord company [
25]. The response time of the fluid is very less compared to the RL electrical circuit inside the MR brake.
2. Hysteresis Effect on MR Brake
Hysteresis is a common phenomenon observed in most areas of engineering. Similarly, it also exists in MR devices and causes limitations in applications of MR devices. Hysteresis in MR brakes majorly exists in ferromagnetic material of the core. It causes nonlinearity in torque control of MR brake. In addition, B-H curve of MR fluid demonstrates little to no hysteresis. This effect is due to the use of magnetically soft properties of the iron used as particles in these fluids and the mobility of particles [
26]. This study aimed to investigate this hysteresis effect under the PWM actuation signal.
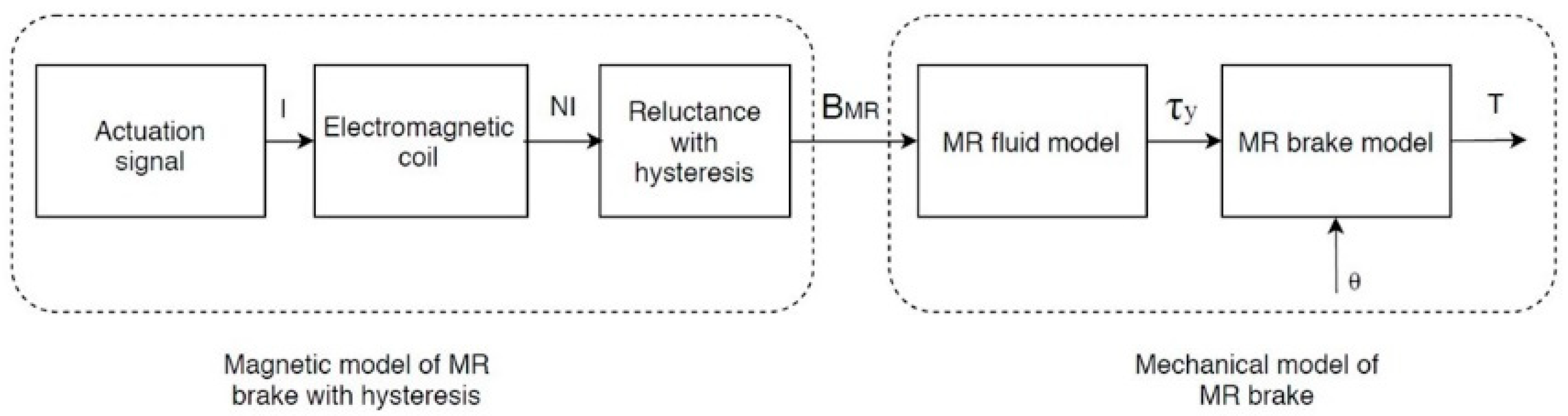
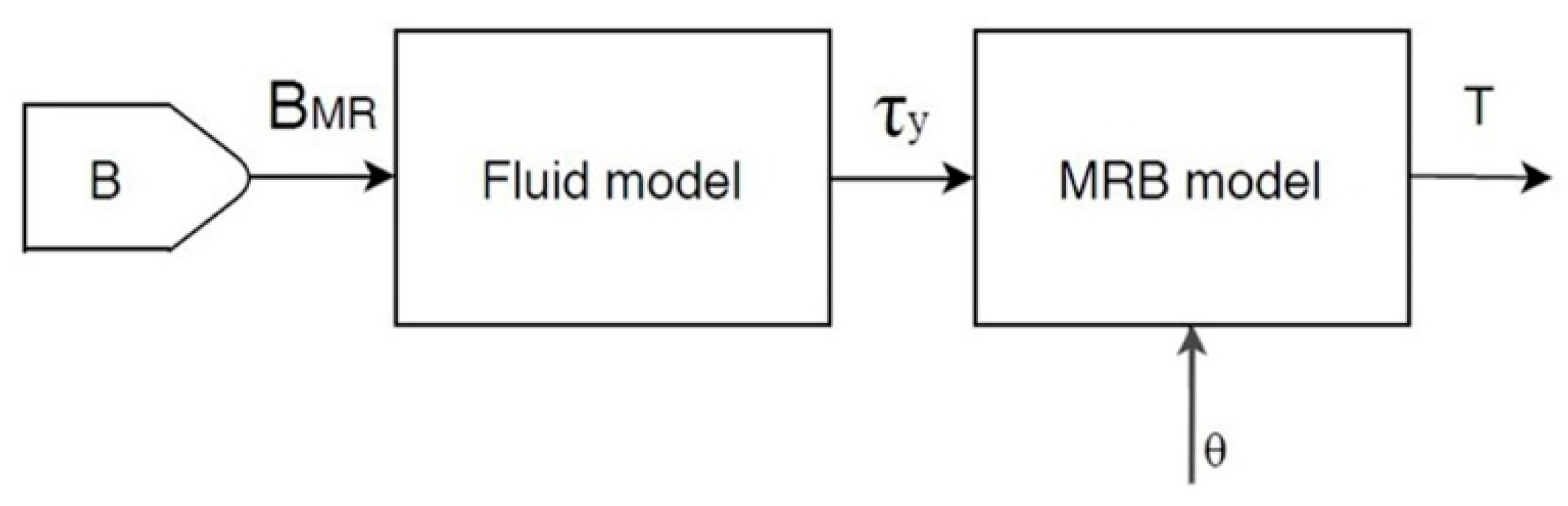
The coil inside an MR brake generates a magnetic field whenever current passes through it. This magnetic field is enhanced by the ferromagnetic core to which the coil is wounded. The increase of the magnetic flux depends on various parameters such as the number of coil turns, the current passing through the coil, core area, and core material, etc. For the factors affecting the flux of an MR brake, the current has a variable value, and the remaining parameters are constant. In the case of a PWM actuation signal, the current is variable. Therefore, the magnetic field (H) also varies to the input current. However, there is a nonlinearity between the applied magnetic field (H) and the magnetic flux density (B) in the material. Because the torque of an MR brake depends on magnetic flux density (B), there are nonlinear behavior shifts between output torque and input current. The paragraph below explains why and how the hysteresis arises in a material.
Although the current in the coil increases, the ferromagnetic core inside the MR brake is magnetized and reaches its saturation. In other words, the domains in the material are aligned in uni-direction. However, although the level current decreases and reaches zero, the material does not demagnetize itself in the initial path. It means that not all the domains in the material are dealigned. Only a few of them change their orientation back to their original state. This causes the material to retain some magnetic field and is called retentivity or magnetic remanence of the material. It leads to an increase in the off-state torque of the MR brake. To eliminate this effect in the system, an opposite current is usually applied until the magnetic remanence becomes zero. This is called the coercivity of the material. If the current is further increased in the opposite direction, the material reaches saturation in the opposite direction. In other words, the domains in the material are oriented in the opposite direction. Although the value of negative current decreases and reaches zero, the material still retains some magnetic field. To make it zero, a positive current must be applied. This forms a hysteresis loop. The area inside the loop is hysteresis loss. Soft magnetic materials have fewer hysteresis losses and hard magnetic materials have more hysteresis losses.
To use a PWM signal to eliminate nonlinearity in torque control, a hysteresis controller needs to be designed separately. This makes a system complex and expensive. The simulated model aims to operate the MR brake between the saturation and retentivity points of the hysteresis loop. The slope of the hysteresis loop in this region along with the self-inductance of the coil helps the torque of the MR brake not to collapse instantaneously to the input current. By considering this as an advantage the power to the coil can be turned off until the torque drops to an acceptable range. This can be achieved using a PWM actuation signal. At high frequencies, the torque drop is less. This makes to choose a high-frequency actuation signal to reduce the current drop (∆I) in the coil. The duty cycle of the PWM signal is varied for the required output torque. The conventional method uses a DC voltage control method in which current to the coil is supplied continuously to maintain the required torque. This way causes high power consumption. As mentioned above using the PWM actuation signal turns the hysteresis into an advantage and reduces the power consumption of the MR brake.
4. Simulation and Experimental Results
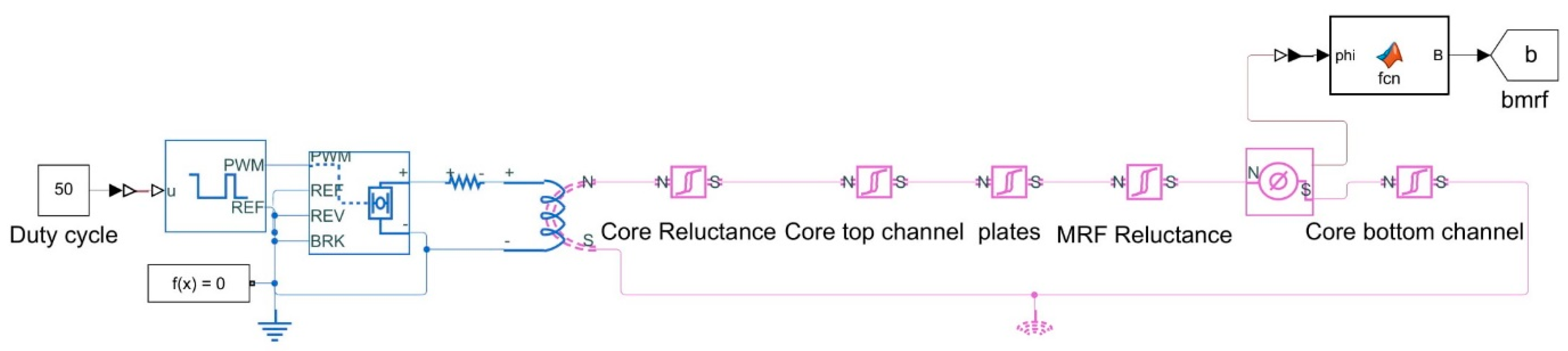
The torque of the MR brake is controlled by the input current to the coil. There are various actuation signals available to activate the electromagnet inside MR brake. Each signal has different effects on hysteresis, the inductance of the coil, and the torque of the MR brake. This paper aims to use the PWM actuation signal. It is interesting to investigate the effect of hysteresis on the torque performance of the MR brake for DC and PWM actuation signals. A physical model of the brake with electrical and magnetic circuits is constructed in Simulink. It helps to study the hysteresis effect on torque and power consumption of the MR brake with desired actuation signals.
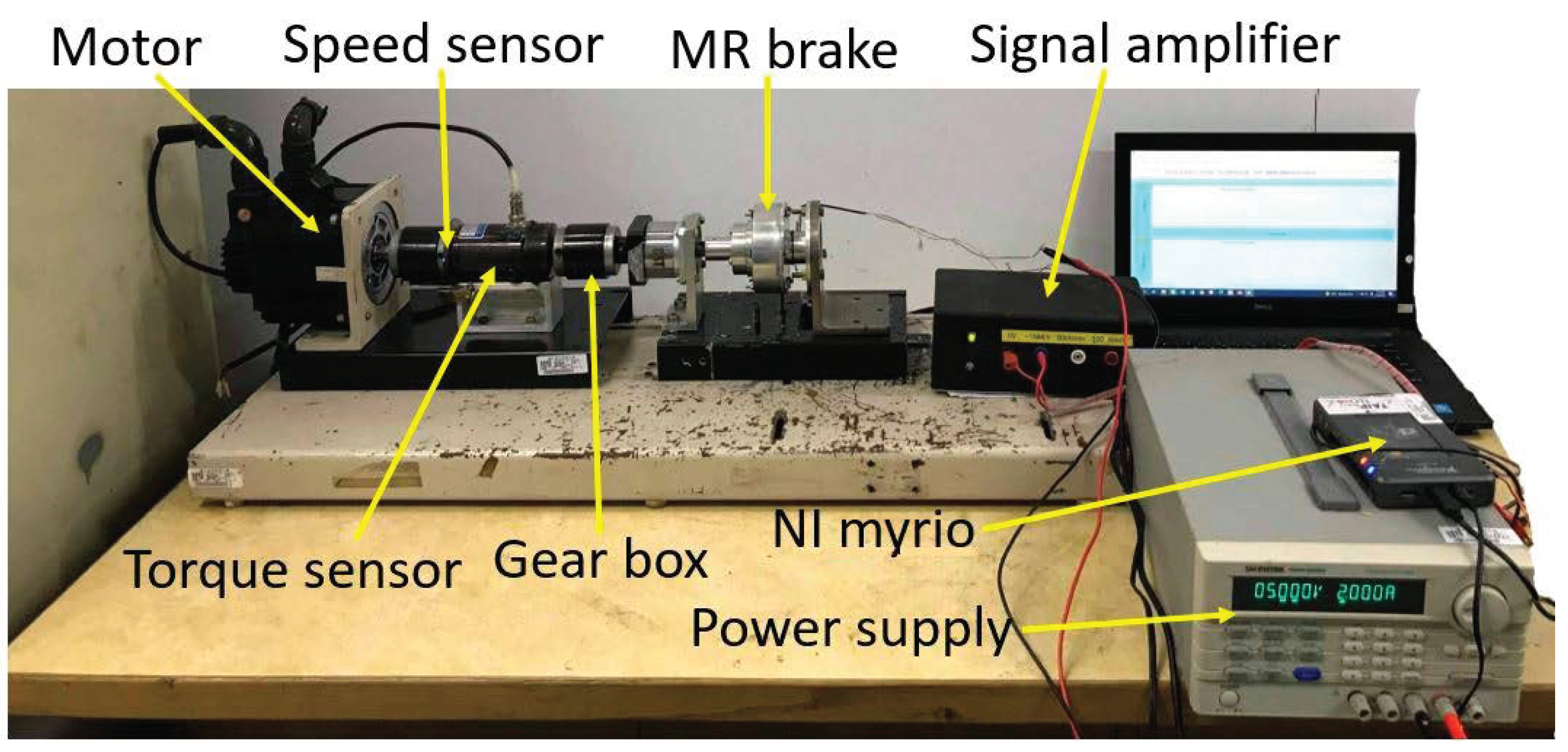
To understand the practical scenario a test bench for MR brake is constructed as shown in
Figure 6. It consists of an MR brake, torque sensor, servo motor, gear box, signal amplifier, NI myrio, power supply and speed sensor. The shaft of the servo motor and the MR brake is coupled to the torque sensor. The servo motor is operated at 300 rpm. The power consumption and performance of the brake torque are tested with DC and PWM signals. The corresponding torque is obtained using NI myrio in labview software. The final validation of the simulated model is accomplished by comparing its results with experimental data.
4.1. DC Actuation Signal
It activates MR brake with constant current and magnetic field. The current in the coil is controlled by the amplitude of DC signal. Simulation and experiment is run by incrementing the current value by 0.2 A and the corresponding torque value is noted. In the below
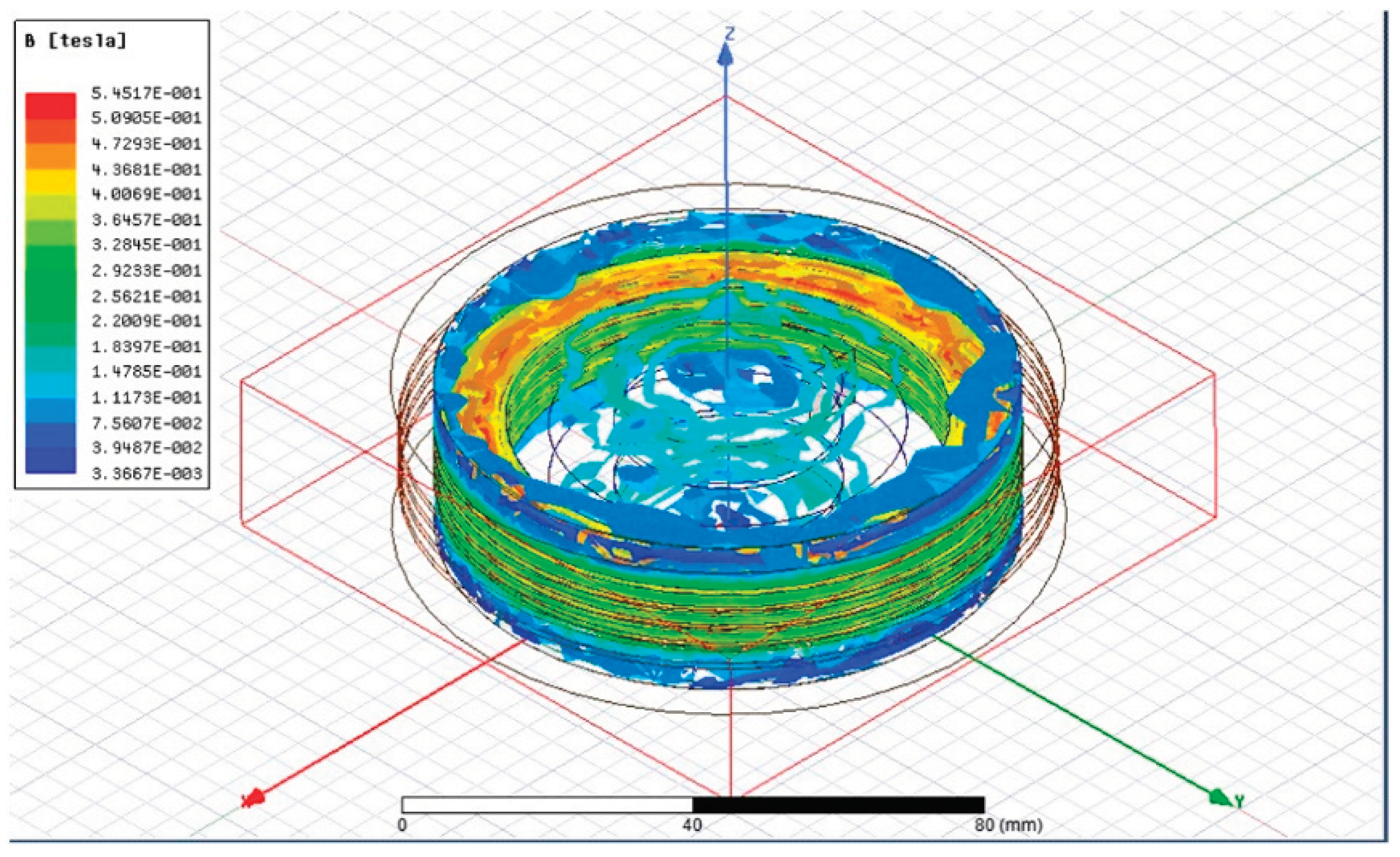
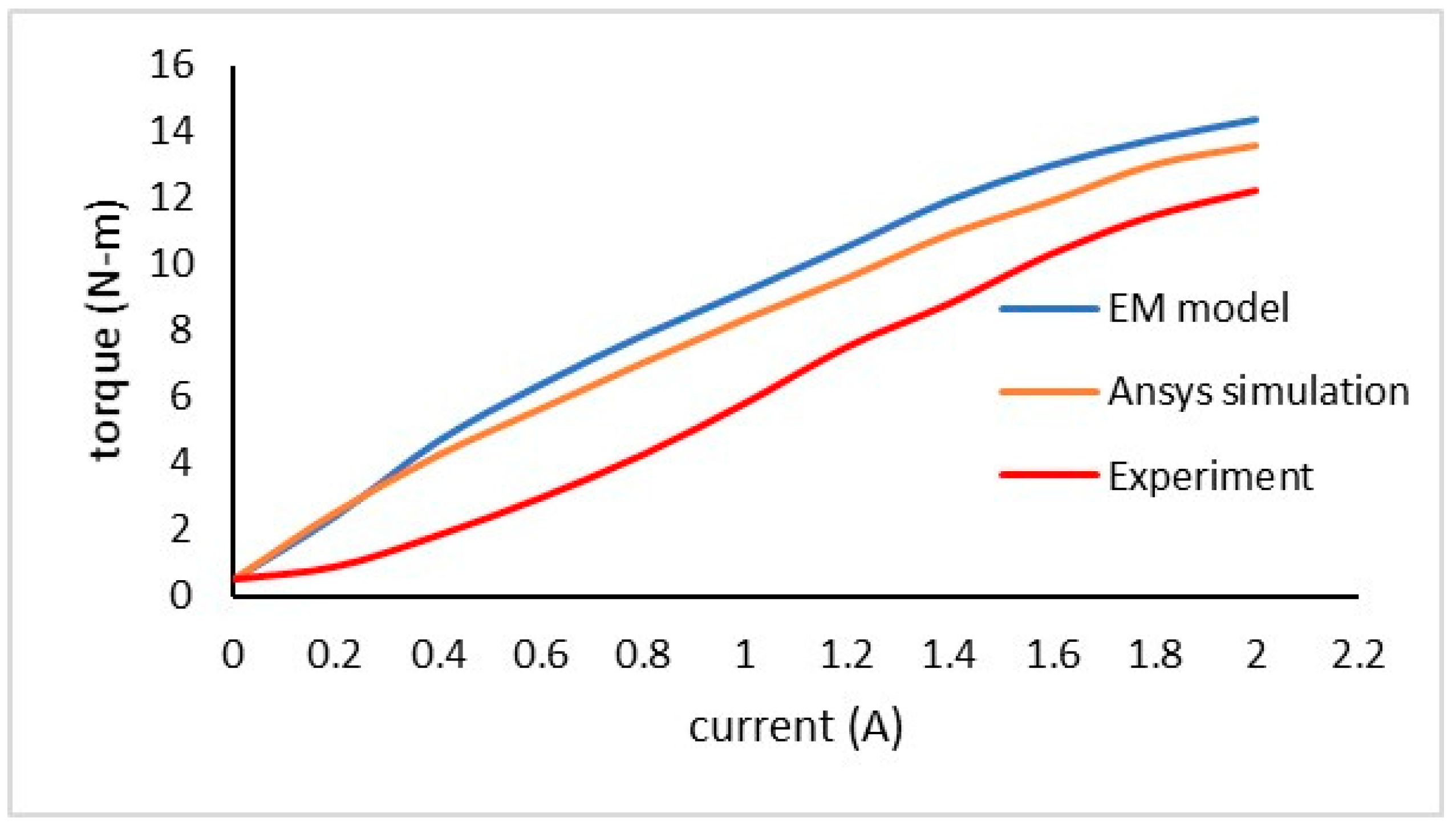
Table 1 we can see that B and T obtained from EM model and ANSYS simulation are nearly close. Simulation results are a little higher and there is a small torque difference of 2 (N-m) between the EM model and experimental results. The torque performance of EM model and ANSYS simulation is shown in
Figure 7. It is observed that torque profile of MR brake obtained from EM model and experiment is similar. A uniform small error can be observed in the torque profile between the EM model and experimental results. The reason for the above differences is because, in the simulation model there is no air gap between the reluctances, coil and core. Therefore, electromagnet generates maximum flux which corresponds to maximum torque of the MR brake. This leads to the higher simulation torque. However, in the practical scenario a coil with the desired number of turns is placed inside the MR brake. Due to the manufacturing tolerances, there were small gaps during the assembly of the components, gap between core and coil, coil windings. These gaps contain air. Permeability of air is very low compared to the core and MR fluid. It reduces the amount of flux flow through the magnetic circuit. This reflects in the reduced torque in the experiment. Hence, our EM model is validated. The advantages of the DC actuating signal are current raises to the maximum and reached the steady state without any ripple. It provides a stable magnetic field and hence stable torque.
4.2. PWM Actuation Signal
It is an efficient method to control the MR brake with the PWM signal over the DC voltage control method. MR brake has a hysteresis effect on the torque performance. In this study, this effect is investigated to reduce the power consumption of the MR brake by turning the hysteresis into an advantage. MR brake with the hysteresis effect is simulated using the PWM actuation signal. PWM signal does not control current or voltage. It only switches the input power ON and OFF. The frequency of the PWM defines how fast it is switching and the duty cycle defines how long the power is ON for each cycle. The switching input creates a ripple in the coil current (∆I) which further creates a ripple in torque (∆T1) of the MR brake. The ripple in the current (∆I) must be minimized to obtain a stable magnetic field and torque. This is achieved in two steps. First, the frequency of the PWM signal is increased up to 5 kHz which reduced ∆I and ∆T1 to considerably low 3.3% and 0.2% respectively. Before we tune the second step, we need to know ∆T2 is the difference between torque obtained from the DC signal and PWM signal.
Figure 8 shows that ripple in current and torque is reducing with the increase in frequency. It is observed that ∆I and ∆T
1 is high at low frequencies (1–100 Hz) and low at high frequencies (500 Hz–5 kHz). This phenomenon is because of the self-inductance and hysteresis effect in the MR brake. They oppose the rate of change in the current and magnetic field. At low frequencies, the current has enough time to rise to the maximum level and decay to the minimum level. This causes a high ripple in the current leading to the ripple in the magnetic field and the torque. In such cases, the back emf generated by the inductor is also high to oppose the change in the current. At high frequencies, the current does not have enough time to rise and decay to peak levels. Therefore, the rising and decaying levels of the current reduces which gives less ripple and low back emf. It leads to a stable magnetic field and torque.
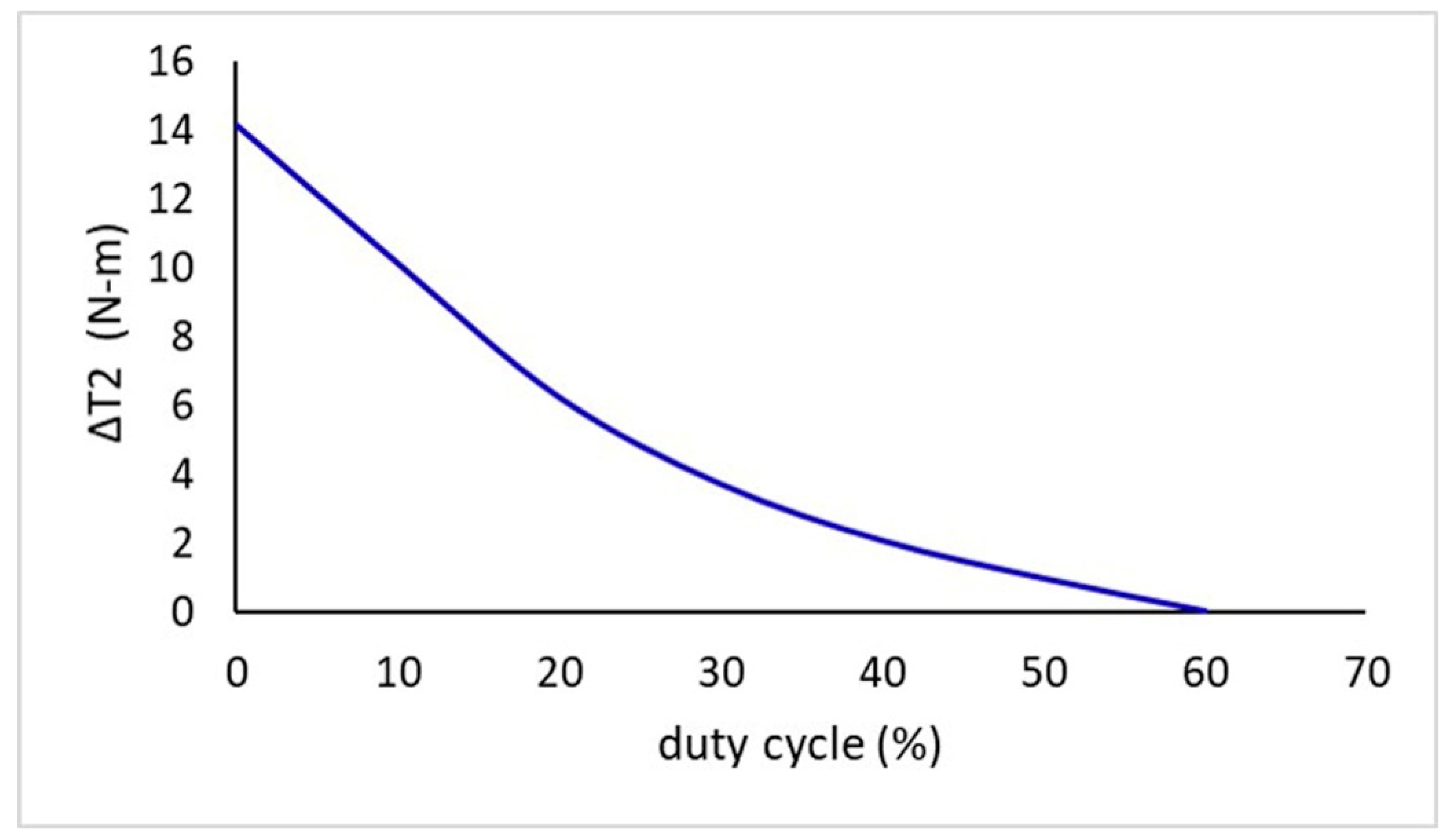
It is now interesting to investigate how ∆T
2 varies with the duty cycle at optimal frequency. During pulse switching voltage rises and drops instantly but the current does not. This is because of back emf, the coil does not allow the current to change instantly. It instead takes one time constant to change the current through it. If the ON time is greater than the time constant of the circuit, current reaches the steady state maintains it until the OFF pulse. To save more power ON time is reduced to less than the time constant such that current immediately falls when it reaches steady state.
Figure 9 shows that ∆T
2 at 60% duty cycle is nearly zero. It means the PWM signal consumed only 60% of the input power to obtain the equivalent torque of DC signal with 0.2% ripple. Variable torque can be obtained by changing the duty cycle between 0–60%. It is clear from the simulation results that at 5 kHz frequency and 60% duty cycle are the optimal values for the selected MR brake with PWM actuation signal. At these optimal values, MR brake can obtain 99.8% steady torque by consuming 6 W of power. As explained earlier hysteresis in the core, the current and magnetic field in the coil does not collapse instantly. This maintains steady torque of the MR brake during the off pulse of the input signal due to the hysteresis effect which was explained previously. This effect is turned into an advantage by choosing PWM as an actuation signal which saves 40% power consumption of MR brake. Therefore, choosing a PWM signal is advantageous over a DC signal.
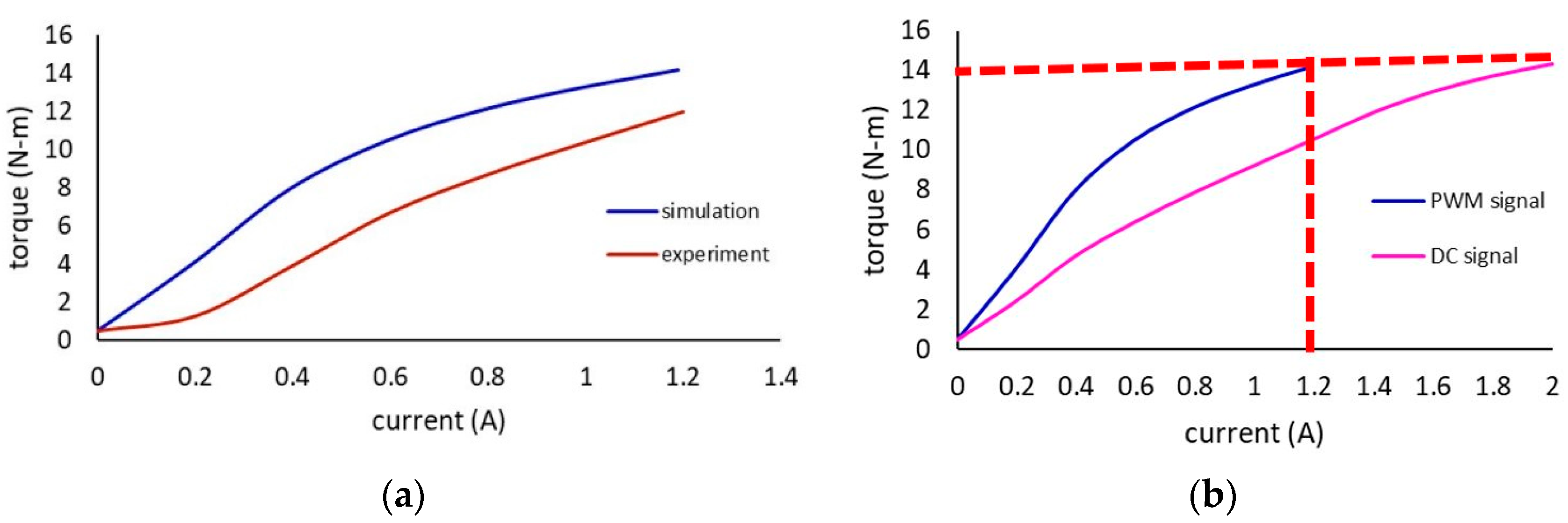
To understand the practical scenario and for the final validation of simulated model, MR brake is tested with PWM actuating signal at an optimal frequency and duty cycle. From the results, in
Figure 10a it can be observed that torque profile of the simulation and experiment is similar. The reason for a uniform error between the simulation and experiment torque is discussed earlier in
Section 4.1. MR brake produced required steady torque of 12 (N-m) by consuming 6 W power. Hence, it is proved that PWM signal provides a steady torque as a DC signal. It is observed from
Figure 10b that there is not much difference in the torque profile of MR brake with the DC and PWM actuation signal. It is obvious that by choosing PWM as an actuation signal the torque performance of the MR brake is not affected. The red dashed line explains that the DC signal obtained 14 (N-m) torque at 2 A of current whereas PWM obtained the same torque level at 1.2 A.
Table 2 shows that flux density and torque obtained by EM model across the rotor disc with PWM signal at 60% duty cycle is nearly same as the simulation torque with DC signal. It means flux density across the rotor disc is enough to maintain the required torque. In this way, the optimal frequency and duty cycle are chosen for the PWM signal. With the DC actuation signal power consumption of MRB is calculated as 10 W. the average power consumed by MRB with PWM actuation signal for 1 cycle at 5 kHz frequency and 60% duty cycle is 6 W. Therefore 40% power can be saved for 1 cycle using the PWM actuating signal compared to the DC signal.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}