
Fully-Printable Soft Actuator with Variable Stiffness by Phase Transition and Hydraulic Regulations

 ,
, 
Abstract
:1. Introduction
- (1)
- We show a variable stiffness hydraulic actuator fully 3D printed using SMPs with no machining or assembly at low cost and actuated under the influence of varying temperature fluids (20–50 C).
- (2)
- We propose a novel method of stiffness and bending control using hydraulic (water) pressure and temperature, replacing the pneumatic control to achieve large stiffness variation and bending angles.
- (3)
- We demonstrate an average stiffness variation of ≈1150% in the actuator by varying the temperature from 50 C (33 mN/mm) to 20 C (414 mN/mm).
- (4)
- We demonstrate controllable deflection (bending) in the actuator, achieving angles between –80 and 80 by utilizing input fluid at a temperature of 20–50 C and a pressure of 0–0.2 MPa.
- (5)
- We demonstrate the gripping of objects using the actuators based on varying temperature and pressure of input hydraulics.
2. Principle
3. Materials and Methods
3.1. Structure of the System
3.2. Structure of the Actuator
3.3. Fabrication of the Actuator
4. Results
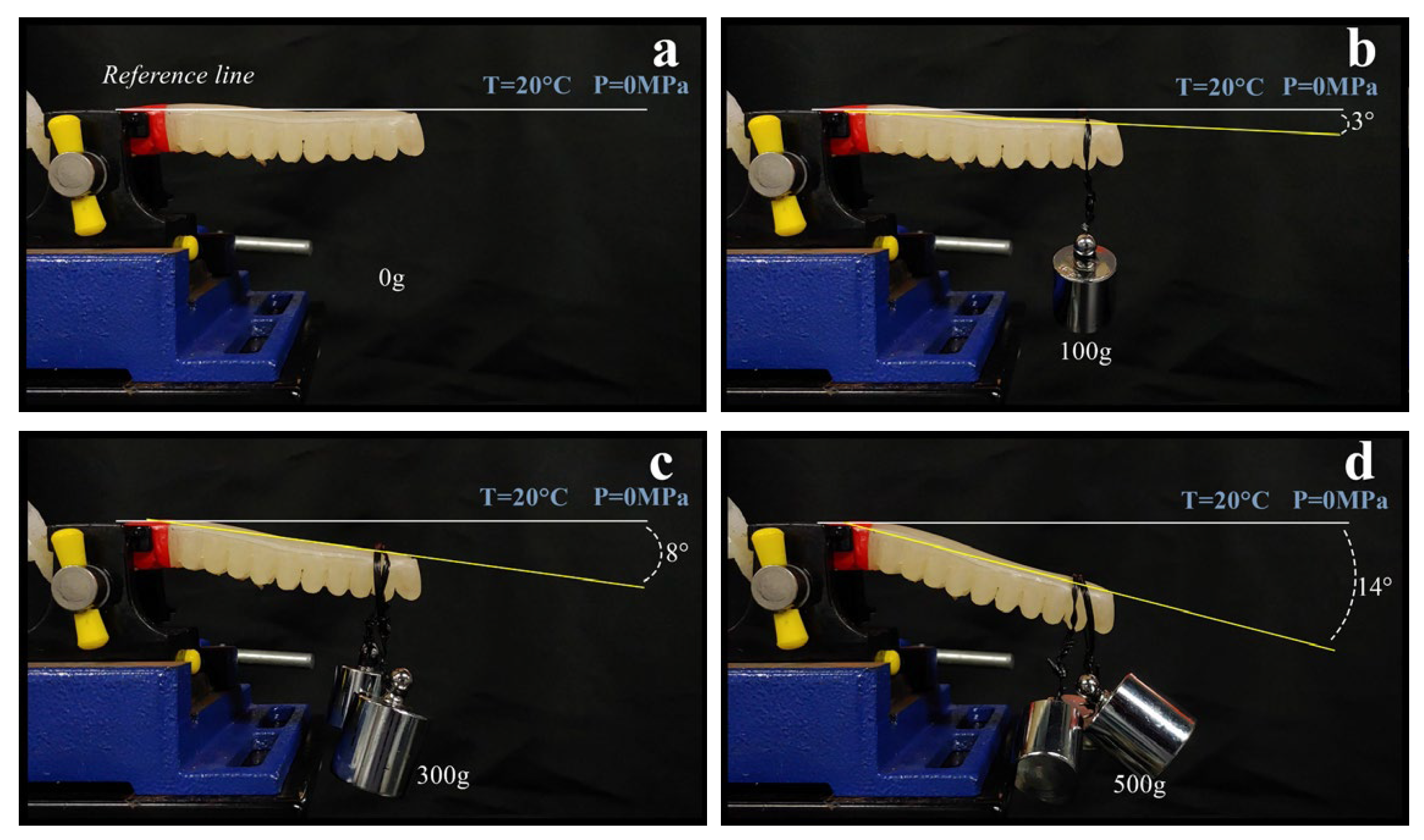
4.1. Testing of Stiffness Variation
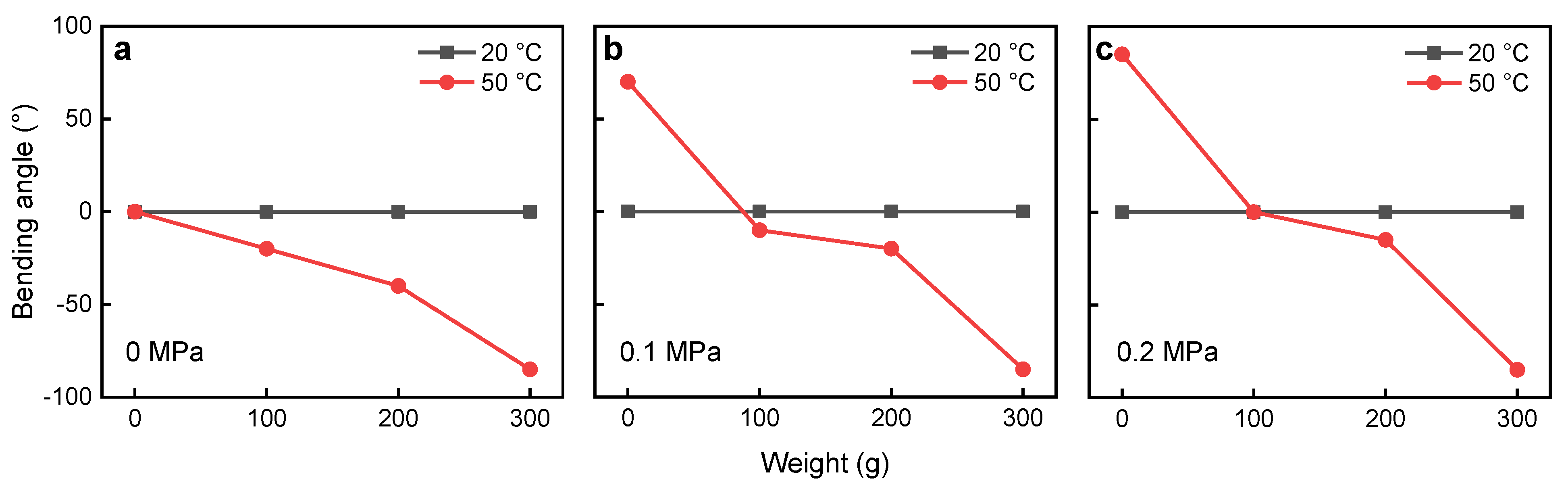
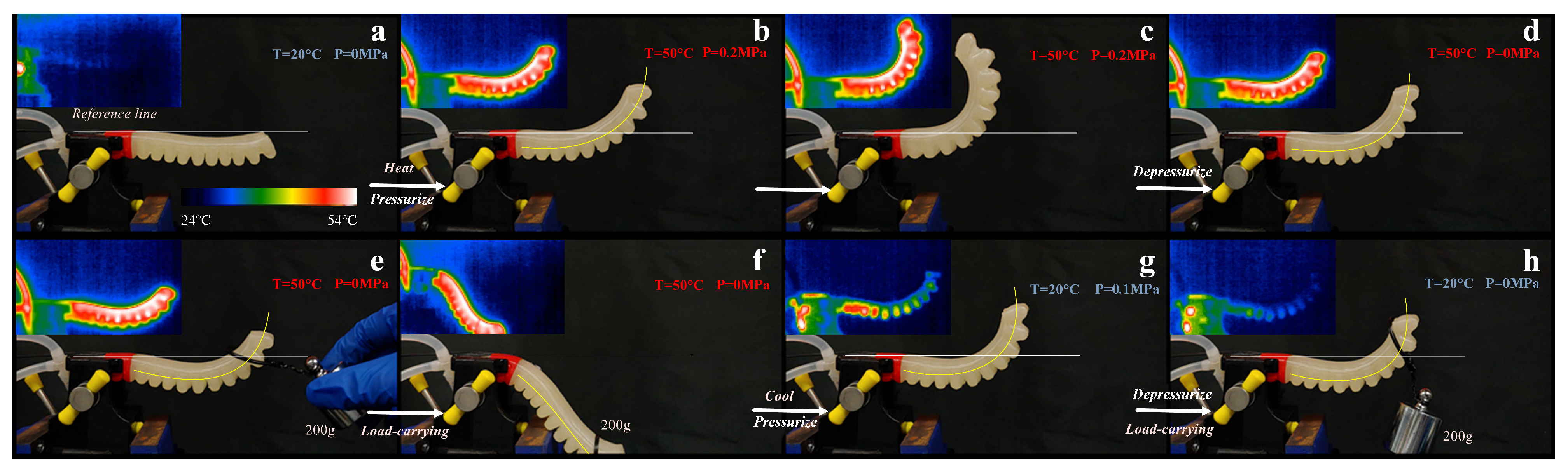
4.2. Factors Affecting the Actuation Mechanism
4.3. Precision of the Actuator
4.4. Output Force
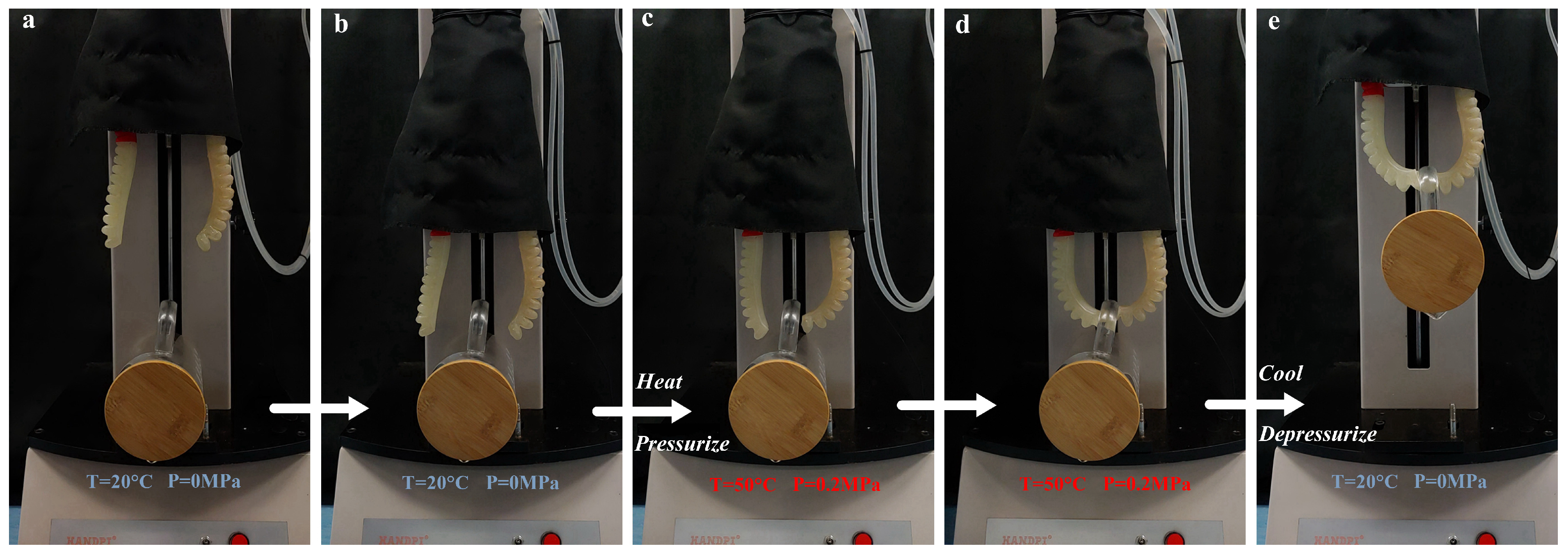
4.5. Application
5. Discussions
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, L.; Godaba, H.; Ren, H.; Zhu, J. Bioinspired Soft Actuators for Eyeball Motions in Humanoid Robots. IEEE/ASME Trans. Mechatron. 2019, 24, 100–108. [Google Scholar] [CrossRef]
- Li, C.; Gu, X.; Xiao, X.; Lim, C.M.; Ren, H. A Robotic System With Multichannel Flexible Parallel Manipulators for Single Port Access Surgery. IEEE Trans. Ind. Inform. 2019, 15, 1678–1687. [Google Scholar] [CrossRef]
- Yufei, H.; Tianmiao, W.; Xi, F.; Kang, Y.; Ling, M.; Juan, G.; Li, W. A variable stiffness soft robotic gripper with low-melting-point alloy. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 6781–6786. [Google Scholar] [CrossRef]
- Hong, S.W.; Yoon, J.Y.; Kim, S.H.; Lee, S.K.; Kim, Y.R.; Park, Y.J.; Kim, G.W.; Choi, S.B. 3D-Printed Soft Structure of Polyurethane and Magnetorheological Fluid: A Proof-of-Concept Investigation of its Stiffness Tunability. Micromachines 2019, 10, 655. [Google Scholar]
- Banerjee, H.; Li, T.; Ponraj, G.; Senthil Kumar, K.; Lim, C.M.; Ren, H. Origami-Layer-Jamming Deployable Retractor with Variable Stiffness and Tactile Sensing. J. Mech. Robot. 2019. [Google Scholar] [CrossRef]
- Abeach, L.A.A.; Nefti-Meziani, S.; Theodoridis, T.; Davis, S. A Variable Stiffness Soft Gripper Using Granular Jamming and Biologically Inspired Pneumatic Muscles. J. Bionic Eng. 2018, 15, 236–246. [Google Scholar]
- Li, C.; Gu, X.; Xiao, X.; Lim, C.M.; Ren, H. Flexible Robot with Variable Stiffness in Transoral Surgery. IEEE/ASME Trans. Mechatron. 2019, 25, 1–10. [Google Scholar] [CrossRef]
- Kalairaj, M.S.; Yeow, B.S.; Lim, C.M.; Ren, H. Needle-Size Bending Actuators Based on Controlled Nitinol Curvatures and Elastic Structures. J. Mech. Robot. 2020, 12, 031015. [Google Scholar] [CrossRef]
- Taylor, A.J.; Slutzky, T.; Feuerman, L.; Ren, H.; Tokuda, J.; Nilsson, K.; Tse, Z.T.H. MR-Conditional SMA-Based Origami Joint. IEEE/ASME Trans. Mechatron. 2019, 24, 883–888. [Google Scholar] [CrossRef]
- Kang, B.; Kojcev, R.; Sinibaldi, E. The first interlaced continuum robot, devised to intrinsically follow the leader. PLoS ONE 2016, 11, e0150278. [Google Scholar]
- Zhang, J.; Wang, T.; Hong, J.; Wang, Y. Review of Soft-bodied Manipulator. J. Mech. Eng. 2017, 53, 19–28. [Google Scholar]
- Li, J.; Sun, M.; Wu, Z.; Yin, H. Design, Analysis, and Grasping Experiments of a Novel Soft Hand: Hybrid Actuator Using Shape Memory Alloy Actuators, Motors, and Electromagnets. Soft Robot. 2018, 7, 396–407. [Google Scholar] [CrossRef]
- Farimani, F.S.; Mojarradi, M.; Hekman, E.; Misra, S. PneuAct-II: Hybrid Manufactured Electromagnetically Stealth Pneumatic Stepper Actuator. IEEE Robot. Autom. Lett. 2020, 5, 3588–3593. [Google Scholar]
- Zhang, Y.F.; Zhang, N.; Hingorani, H.; Ding, N.; Wang, D.; Yuan, C.; Zhang, B.; Gu, G.; Ge, Q. Fast-Response, Stiffness-Tunable Soft Actuator by Hybrid Multimaterial 3D Printing. Adv. Funct. Mater. 2019, 29, 1806698. [Google Scholar] [CrossRef]
- Santo, L.; Quadrini, F.; Bellisario, D.; Iorio, L. Applications of Shape-Memory Polymers, and Their Blends and Composites. In Shape Memory Polymers, Blends and Composites: Advances and Applications; Parameswaranpillai, J., Siengchin, S., George, J.J., Jose, S., Eds.; Springer: Singapore, 2020; pp. 311–329. [Google Scholar] [CrossRef]
- Haskew, M.J.; Hardy, J.G. A mini-review of shape-memory polymer-based materials. Johns. Matthey Technol. Rev. 2020, 64, 425–442. [Google Scholar]
- Akbari, S.; Sakhaei, A.H.; Panjwani, S.; Kowsari, K.; Serjouei, A.; Ge, Q. Multimaterial 3D printed soft actuators powered by shape memory alloy wires. Sens. Actuators A Phys. 2019, 290, 177–189. [Google Scholar]
- Kang, M.; Pyo, Y.; Young Jang, J.; Park, Y.; Son, Y.H.; Choi, M.; wan Ha, J.; Chang, Y.W.; Lee, C.S. Design of a shape memory composite (SMC) using 4D printing technology. Sens. Actuators A Phys. 2018, 283, 187–195. [Google Scholar]
- Yang, Y.; Chen, Y.; Wei, Y.; Li, Y. 3D printing of shape memory polymer for functional part fabrication. Int. J. Adv. Manuf. Technol. 2016, 84, 2079–2095. [Google Scholar] [CrossRef]
- Zolfagharian, A.; Kouzani, A.Z.; Khoo, S.Y.; Moghadam, A.A.A.; Gibson, I.; Kaynak, A. Evolution of 3D printed soft actuators. Sens. Actuators A Phys. 2016, 250, 258–272. [Google Scholar]
- Gul, J.Z.; Sajid, M.; Rehman, M.M.; Siddiqui, G.U.; Shah, I.; Kim, K.H.; Lee, J.W.; Choi, K.H. 3D printing for soft robotics—A review. Sci. Technol. Adv. Mater. 2018, 19, 243–262. [Google Scholar]
- MacCurdy, R.; Katzschmann, R.; Kim, Y.; Rus, D. Printable hydraulics: A method for fabricating robots by 3D co-printing solids and liquids. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3878–3885. [Google Scholar]
- Huang, W.M.; Yang, B.; An, L.; Li, C.; Chan, Y.S. Water-driven programmable polyurethane shape memory polymer: Demonstration and mechanism. Appl. Phys. Lett. 2005, 86, 114105. [Google Scholar] [CrossRef]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.F.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, G.M. Pneumatic Networks for Soft Robotics that Actuate Rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170. [Google Scholar] [CrossRef]
- Polygerinos, P.; Lyne, S.; Wang, Z.; Nicolini, L.F.; Mosadegh, B.; Whitesides, G.M.; Walsh, C.J. Towards a Soft Pneumatic Glove for Hand Rehabilitation. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1512–1517. [Google Scholar] [CrossRef]
- Salimon, A.; Senatov, F.; Kalyaev, V.; Korsunsky, A. Chapter 6—Shape memory polymer blends and composites for 3D and 4D printing applications. In 3D and 4D Printing of Polymer Nanocomposite Materials; Sadasivuni, K.K., Deshmukh, K., Almaadeed, M.A., Eds.; Elsevier: Amsterdam, The Netherlands, 2020; pp. 161–189. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, Y. Novel design and 3D printing of variable stiffness robotic fingers based on shape memory polymer. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 195–200. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Printing Parameter | Value |
|---|---|
| Layer Height (mm) | 0.05 |
| First Layer Height (mm) | 0.2 |
| Print Speed (mm/s) | 50 |
| Extruder Temperature (C) | 220 |
| Plate Temperature (C) | 0 |
| Print Infill | 100% |
| Support | No |
| Cooling | No |
| Properties | Average Ratio |
|---|---|
| Stiffness (T = 20 C: T = 50 C) | 13.1:1 |
| Heating Time (T = 50 C: T = 65 C: T = 80 C) | 2.4:1.2:1 |
| Cooling Time (T = 24 C: T = 18 C) | 1.5:1 |
| The Maximum Output Force (T = 50 C: T = 20 C) | 5.9:1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, T.; Kalairaj, M.S.; Cai, C.J.; Tse, Z.T.H.; Ren, H. Fully-Printable Soft Actuator with Variable Stiffness by Phase Transition and Hydraulic Regulations. Actuators 2021, 10, 269. https://doi.org/10.3390/act10100269
Liao T, Kalairaj MS, Cai CJ, Tse ZTH, Ren H. Fully-Printable Soft Actuator with Variable Stiffness by Phase Transition and Hydraulic Regulations. Actuators. 2021; 10(10):269. https://doi.org/10.3390/act10100269
Chicago/Turabian StyleLiao, Tingchen, Manivannan Sivaperuman Kalairaj, Catherine Jiayi Cai, Zion Tsz Ho Tse, and Hongliang Ren. 2021. "Fully-Printable Soft Actuator with Variable Stiffness by Phase Transition and Hydraulic Regulations" Actuators 10, no. 10: 269. https://doi.org/10.3390/act10100269