
A Double-Acting Piezoelectric Actuator for Helicopter Active Rotor


Abstract
:1. Introduction
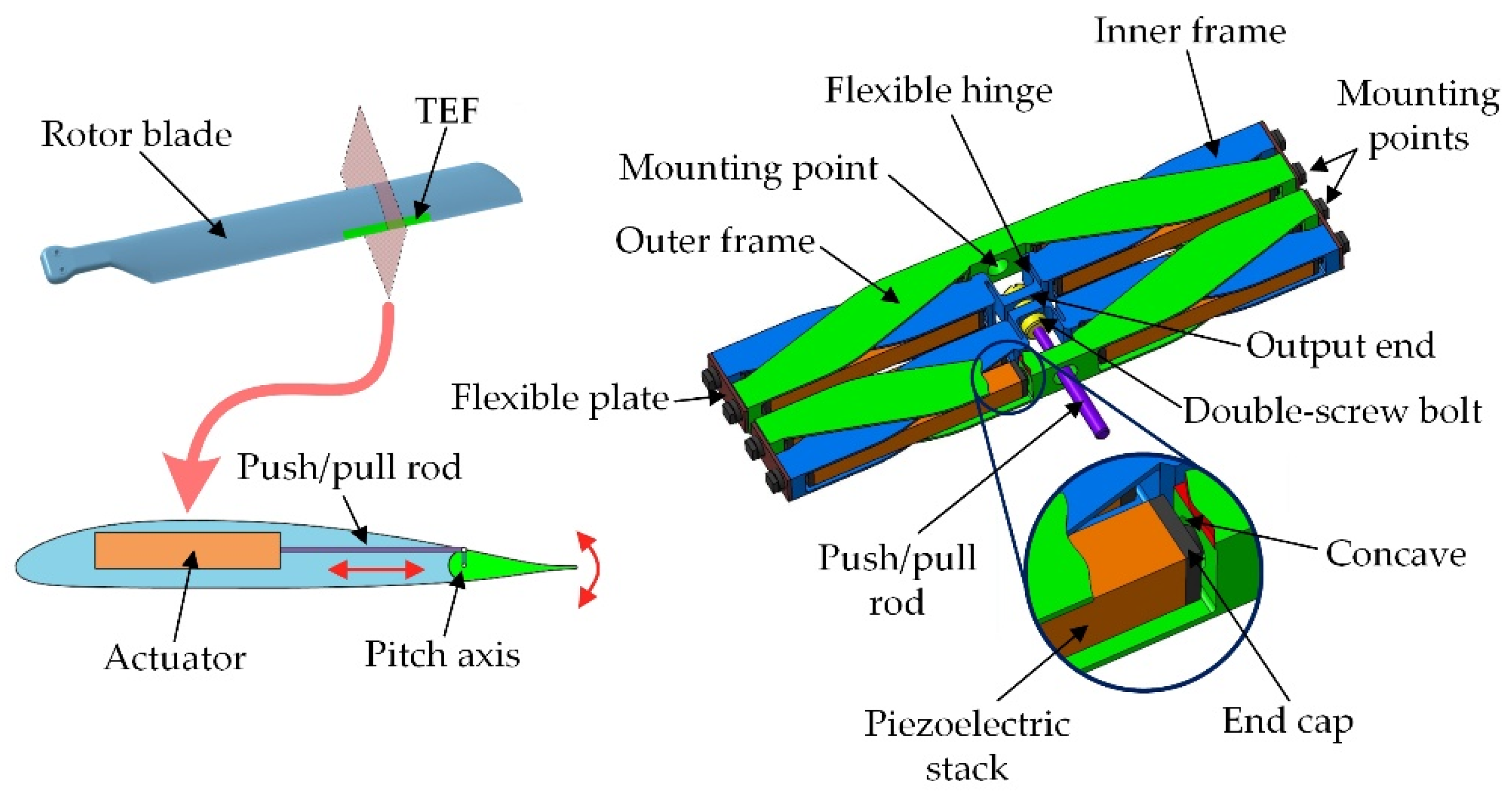
2. Structure and Operating Principle
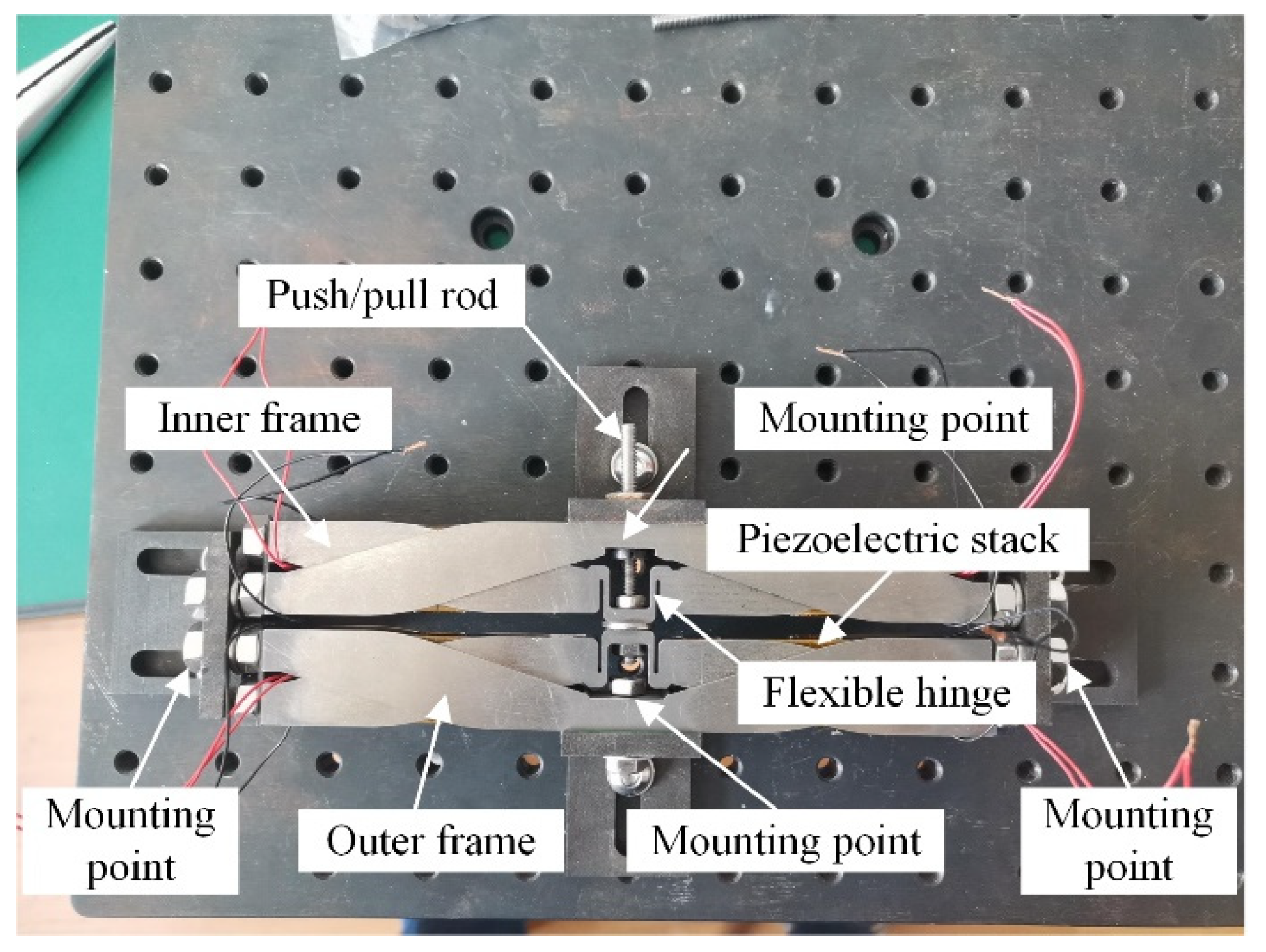
2.1. Structure of the Double-Acting Actuator
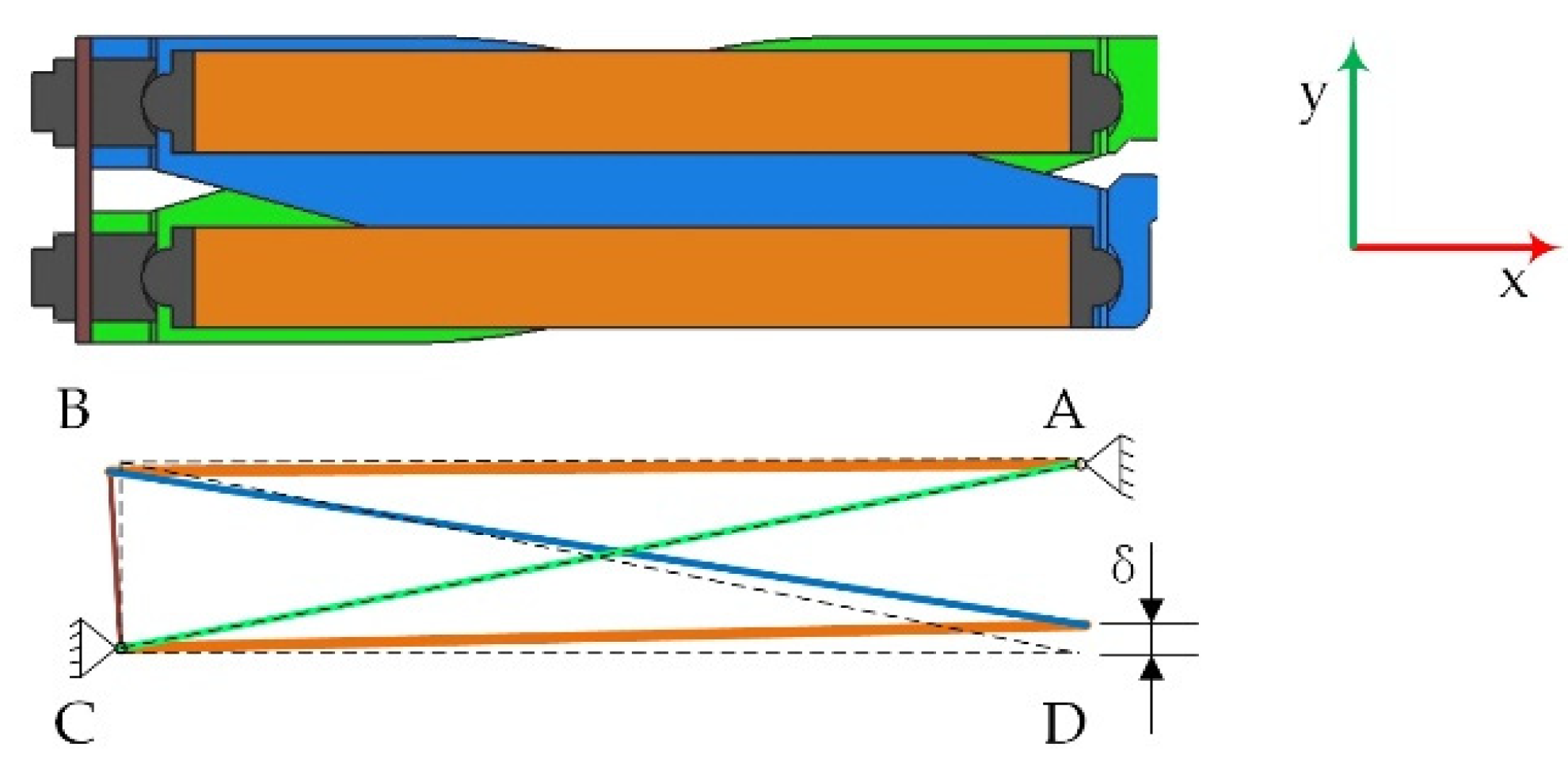
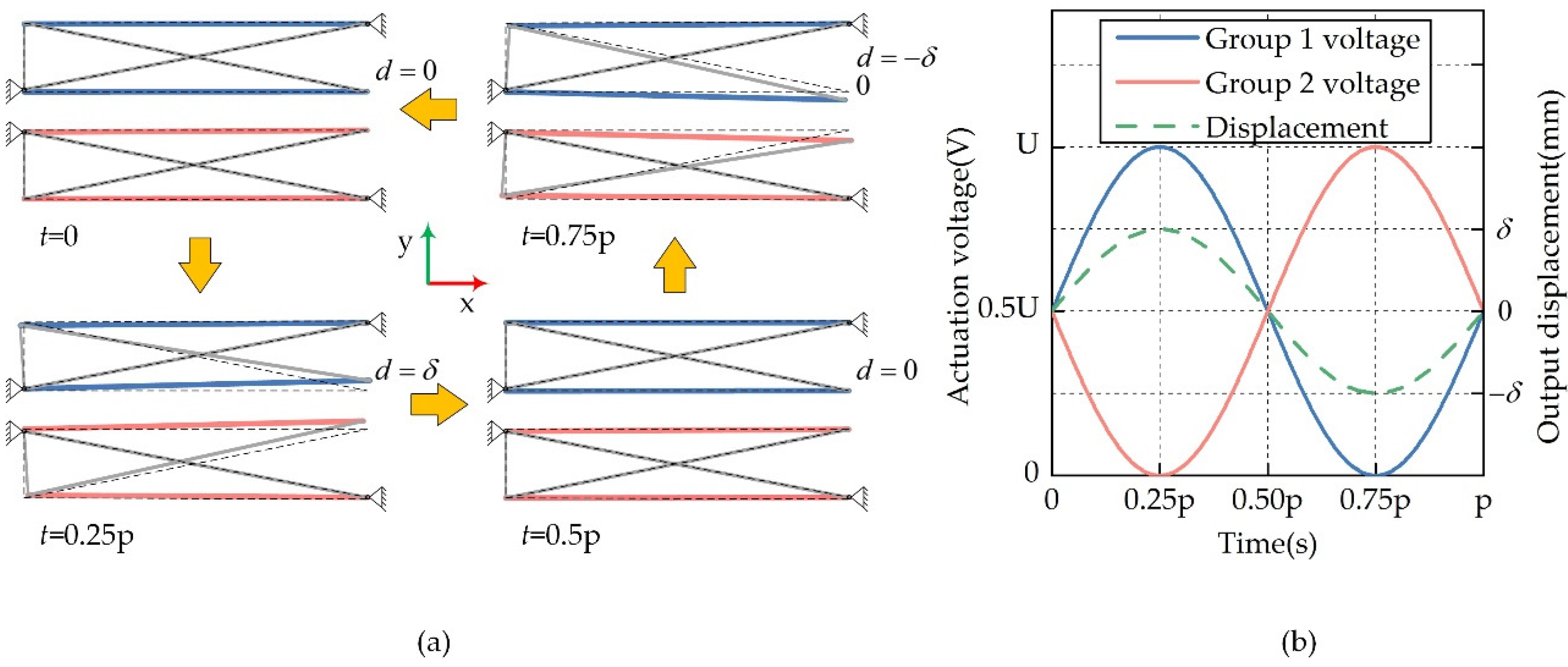
2.2. Operating Principle of the Double-Acting Actuator
3. Simulation Models and Structural Optimization
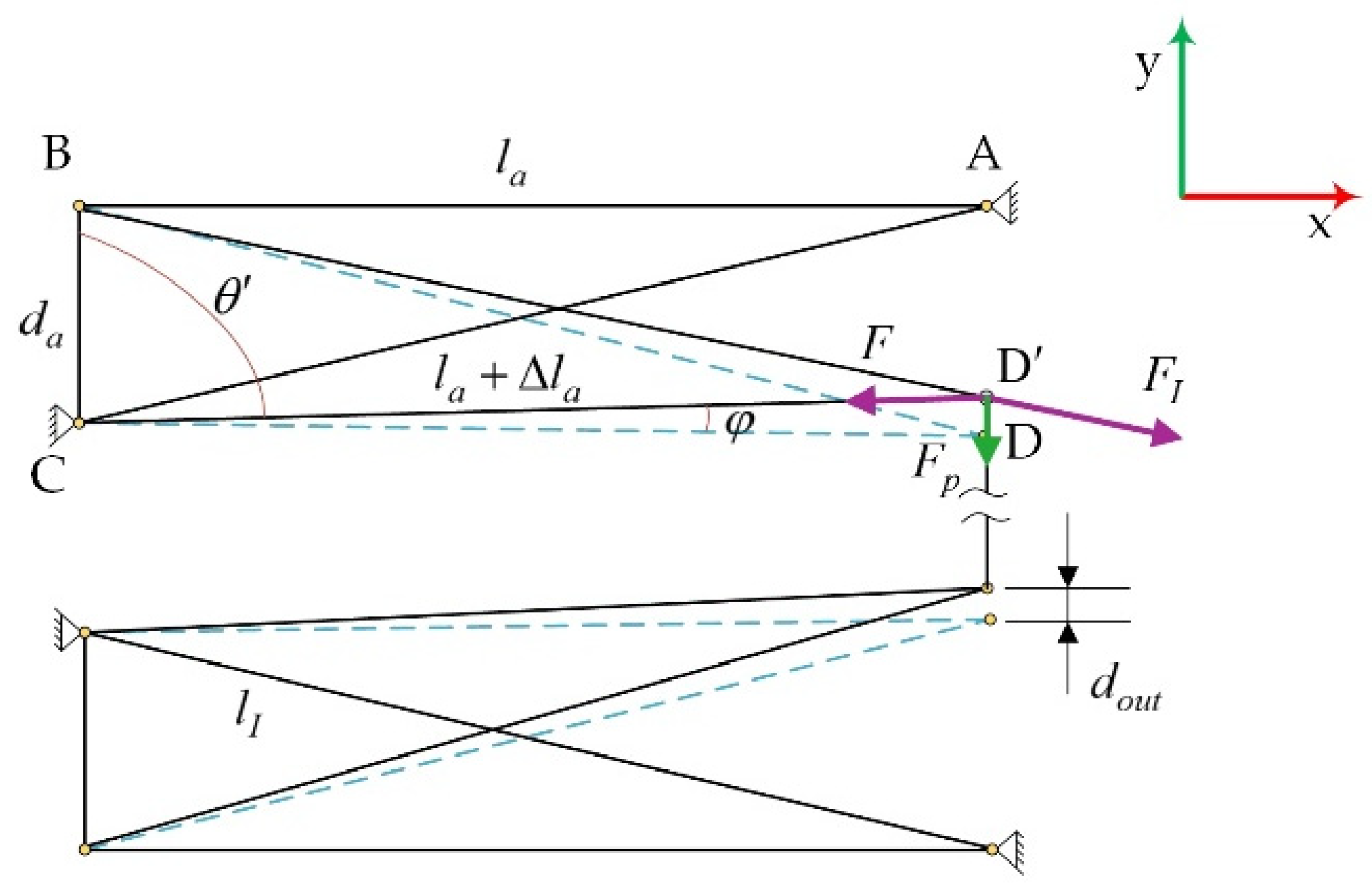
3.1. Theoretical Model of the Actuator
- (1)
- The position of point B does not change with the variation of actuation voltage;
- (2)
- remains constant at 90 degrees;
- (3)
- The lengths of the inner frame BD and the outer frame AC stay the same, and their compliance is neglected.
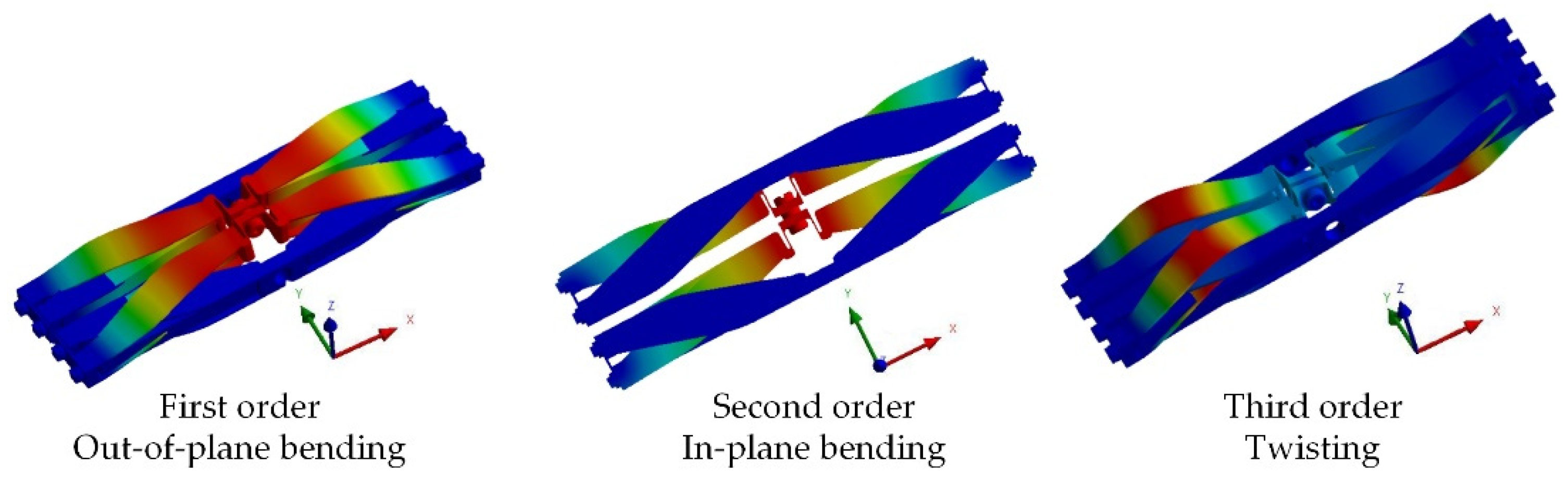
3.2. Finite Element Model of the Actuator
3.3. Structural Optimization for the Actuator
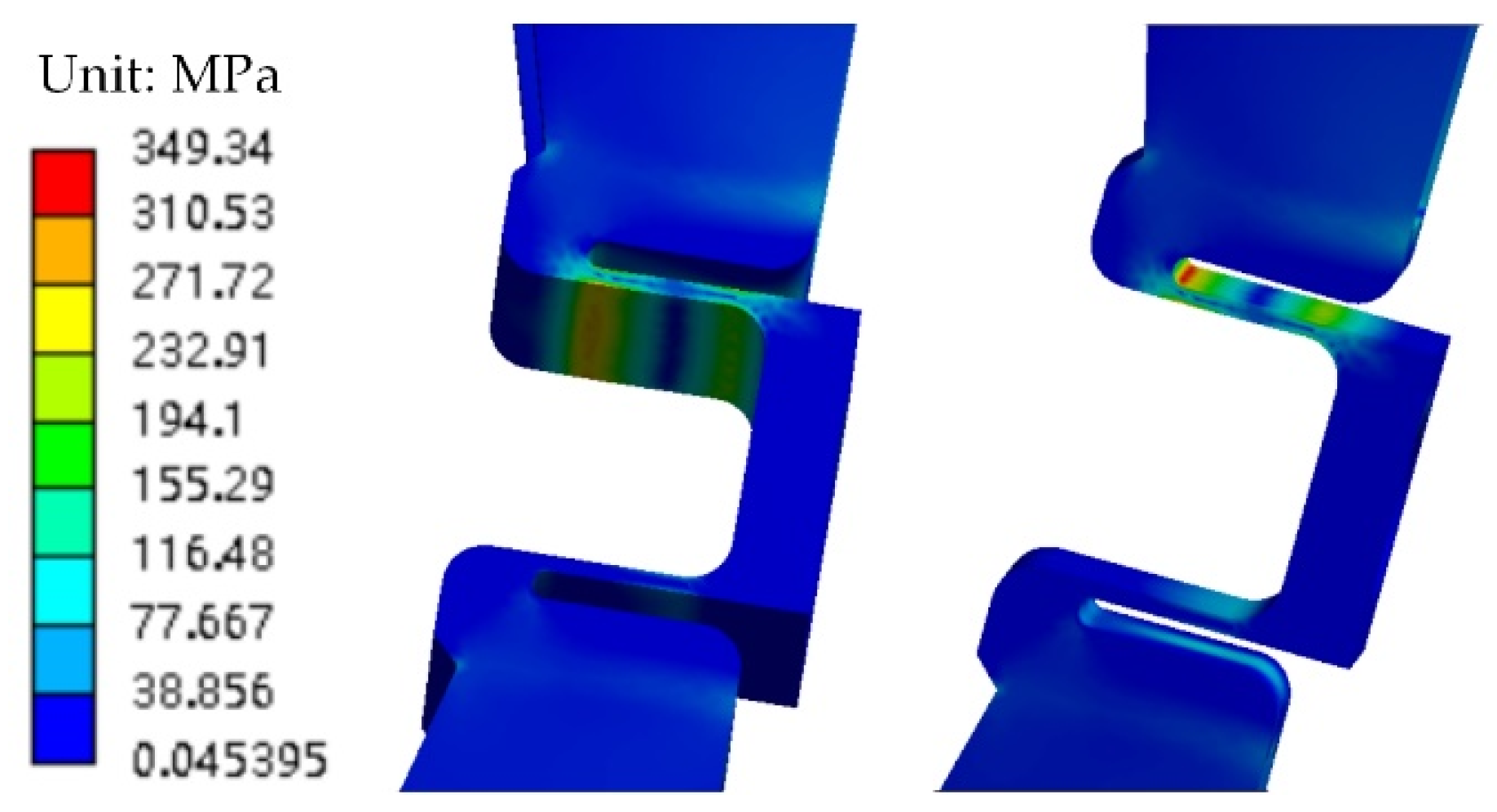
3.3.1. Thickness of Flexible Hinges
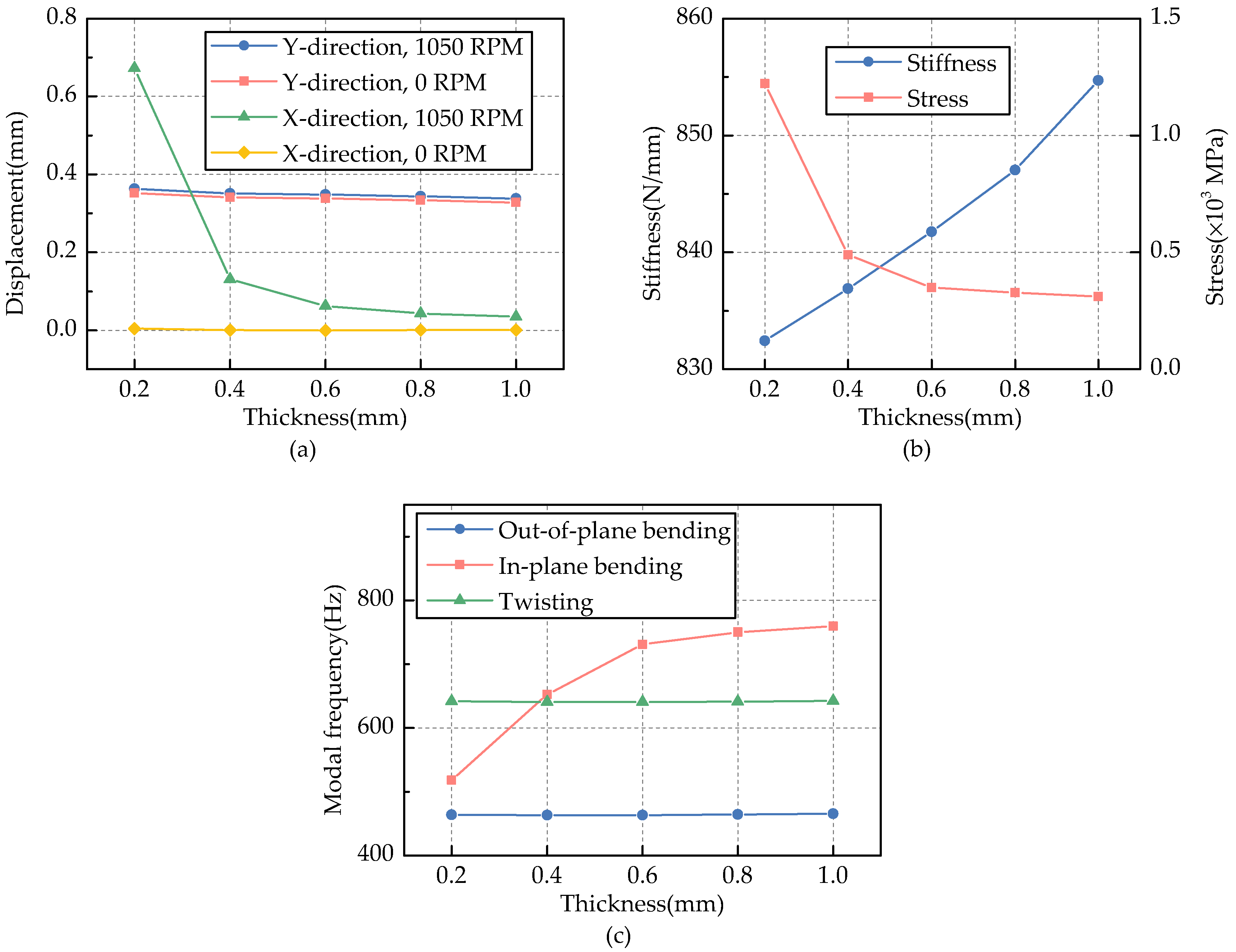
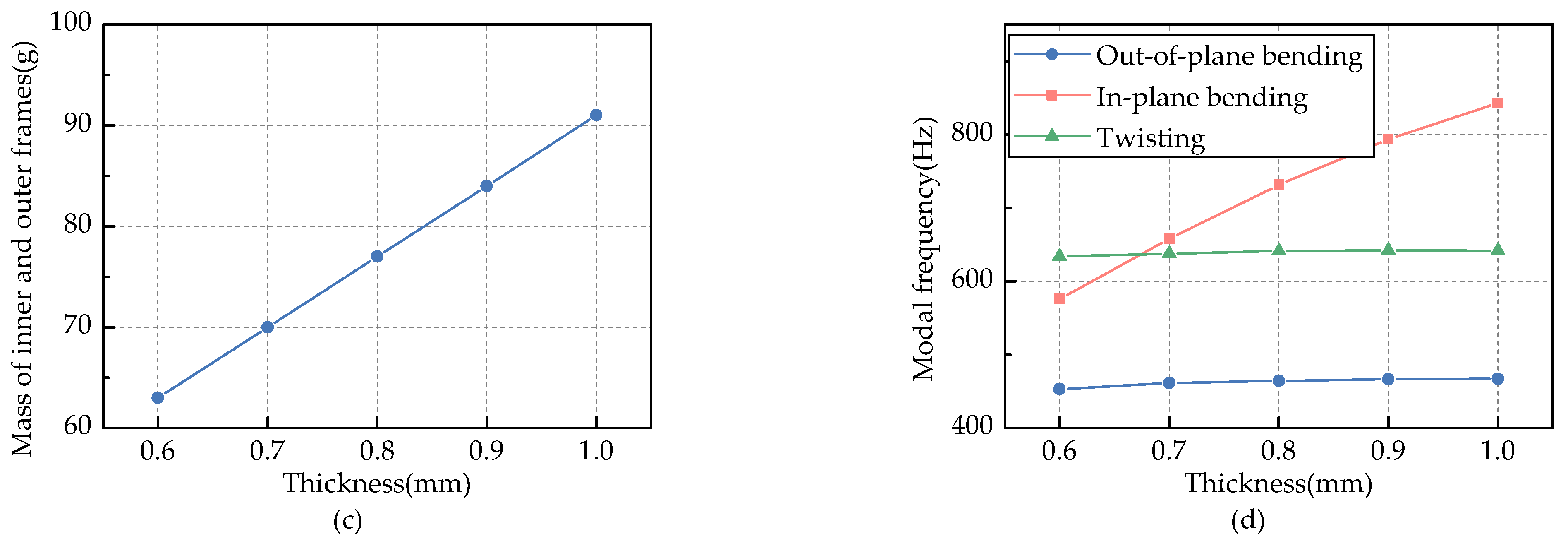
3.3.2. Thickness of Inner/Outer Frames
4. Benchtop Tests of the Actuator Prototype
5. Conclusions
- (1)
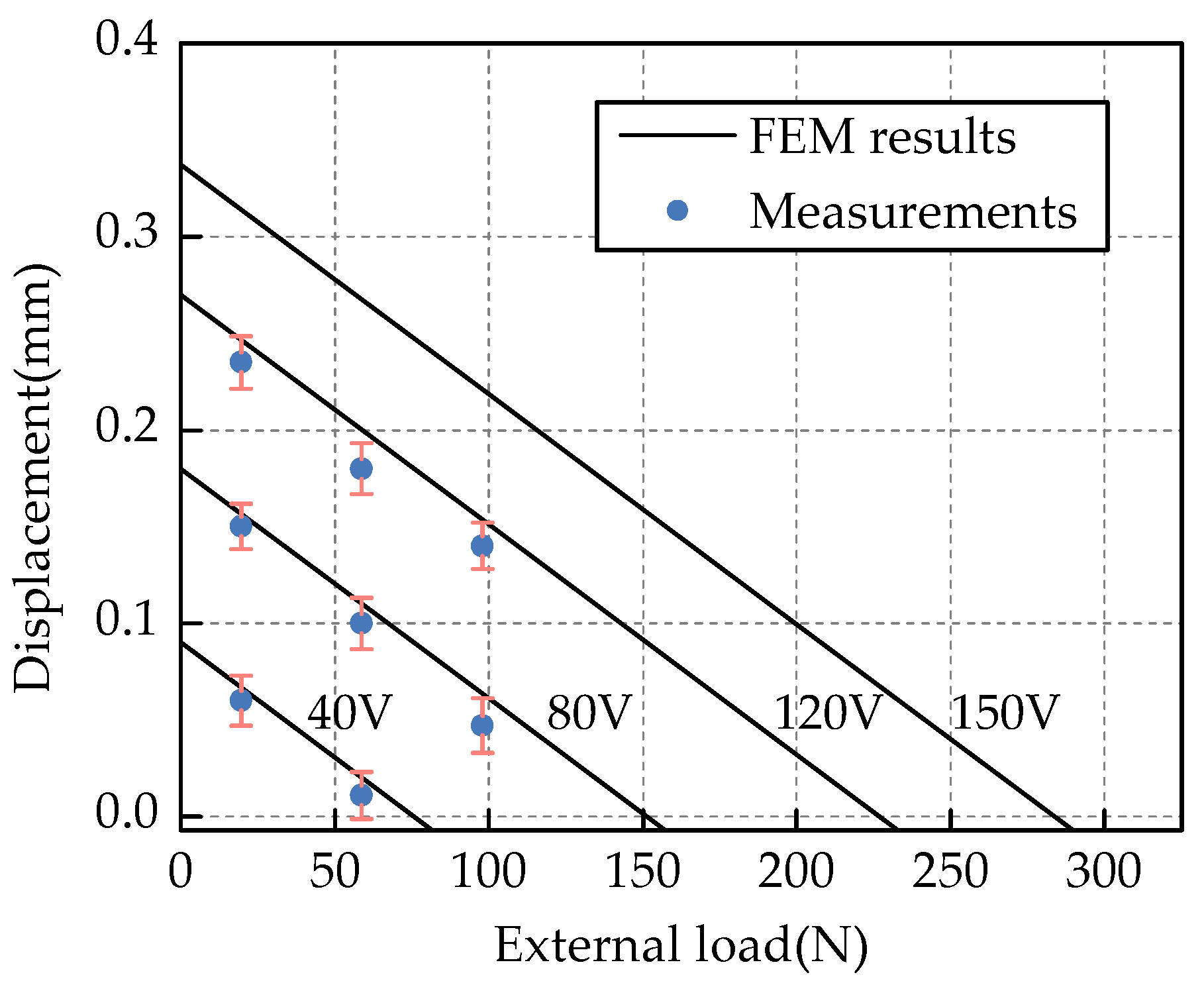
- The theoretical model and the FEM model established in this study could precisely predict the output stroke of the actuator. The maximum error between the theoretical model outputs and the experimental measurements was 0.016 mm, while it was 0.019 mm for the FEM model. The theoretical model was capable of determining the primary parameters of this actuator, while the FEM model could be utilized to perform structural optimization.
- (2)
- The output stroke of this actuator reached ±0.27 mm when subjected to actuation voltages of 120 V and a high stiffness of 801 N/mm was achieved, which is important to alleviate the negative deflection of TEFs resulting from external loads.
- (3)
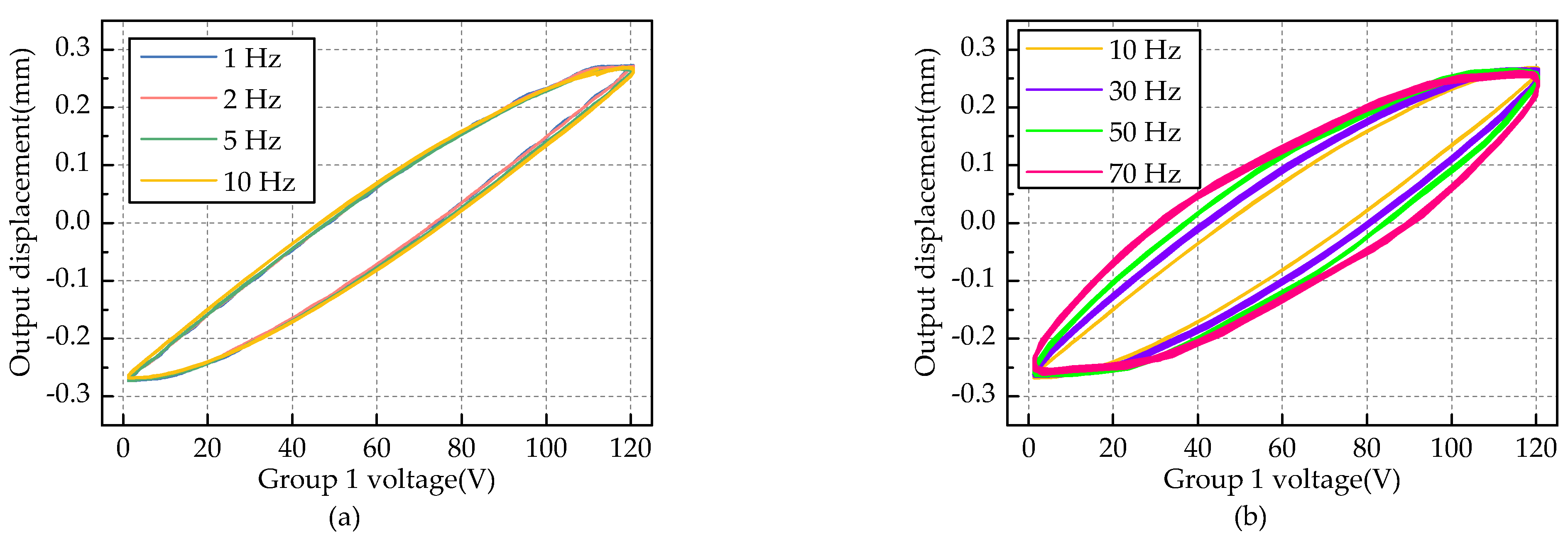
- Even though the hysteresis of this piezoelectric actuator increased with the increase of actuation frequency, the degradation in the output stroke was minor. The actuator could still generate a free stroke of about ±0.25 mm at the frequency of 70 Hz, demonstrating a wide operating bandwidth of this actuator and its capability to drive an active rotor with high rotational speed.
- (4)
- The actuator could still produce an acceptable output when some piezoelectric stacks failed, and the initial position of the output ends remained unchanged in this condition, consequently, the aerodynamic balance of the helicopter rotor was not influenced in presence of piezoelectric stack failure.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Friedmann, P.P. On-blade control of rotor vibration, noise, and performance: Just around the corner? J. Am. Helicopter Soc. 2014, 59, 1–37. [Google Scholar] [CrossRef]
- Enenkl, B.; Klöppel, V.; Preißler, D.; Jänker, P. Full scale rotor with piezoelectric actuated blade flaps. In Proceedings of the 28th Annual Forum of the European Rotorcraft Forum, Bristol, UK, 17–19 September 2002; Royal Aeronautical Society: London, UK, 2002. [Google Scholar]
- Dieterich, O.; Enenkl, B.; Roth, D. Trailing edge flaps for active rotor control aeroelastic characteristics of the ADASYS rotor system. In Proceedings of the 62nd Annual Forum of the American Helicopter Society, Phoenix, AZ, USA, 9–11 May 2006; AHS International: Fairfax, VA, USA, 2006; pp. 964–985. [Google Scholar]
- Padthe, A.K.; Friedmann, P.P. Simultaneous BVI noise and vibration reduction in rotorcraft using microflaps including the effect of actuator saturation. In Proceedings of the 68th Annual Forum of the American Helicopter Society, Fort Worth, TX, USA, 1–3 May 2012; AHS International: Fairfax, VA, USA, 2012; pp. 1316–1338. [Google Scholar]
- Hall, S.R.; Prechtl, E.F. Development of a piezoelectric servoflap for helicopter rotor control. Smart Mater. Struct. 1996, 5, 26–34. [Google Scholar] [CrossRef]
- Woods, B.K.S.; Kothera, C.S.; Wereley, N.M. Whirl testing of a pneumatic artificial muscle actuation system for a full-scale active rotor. J. Am. Helicopter Soc. 2014, 59, 1–11. [Google Scholar] [CrossRef]
- Jänker, P.; Christmann, M.; Hermle, F.; Lorkowski, T.; Storm, S. Mechatronics using piezoelectric actuators. J. Eur. Ceram. Soc. 1999, 19, 1127–1131. [Google Scholar] [CrossRef]
- Lorber, P.; Neill, J.J.; Isabella, B.; Wake, B.E.; Jonsson, U.; Sun, F. Whirl test of a large scale high authority active flap rotor. In Proceedings of the 66th Annual Forum of the American Helicopter Society, Phoenix, AZ, USA, 11–13 May 2010; AHS International: Fairfax, VA, USA, 2010; pp. 2572–2858. [Google Scholar]
- Lorber, P.; Neill, J.J.; Hein, B.; Isabella, B.; Andrews, J.; Brigley, M.; Wong, J.; LeMasurier, P.; Wake, B. Whirl and wind tunnel testing of the Sikorsky active flap demonstration rotor. In Proceedings of the 67th Annual Forum of the American Helicopter Society, Virginia Beach, VA, USA, 3–5 May 2011; AHS International: Fairfax, VA, USA, 2011; pp. 3138–3156. [Google Scholar]
- Myasnikov, M.I.; Esaulov, S.Y.; Filenkov, E.V.; IIyin, I.R. Actively controlled trailing edge flaps with electromechanical actuation. In Proceedings of the 44th Annual Forum of European Rotorcraft Forum, Delft, The Netherlands, 19–20 September 2018; Netherlands Association of Aeronautical Engineers: Amsterdam, The Netherlands, 2018; pp. 1334–1341. [Google Scholar]
- Li, J.F.; Zhang, X.B. Active flow control for supersonic aircraft: A novel hybrid synthetic jet actuator. Sens. Actuator A Phys. 2020, 302, 111770. [Google Scholar] [CrossRef]
- Vo, T.V.K.; Lubecki, T.M.; Chow, W.T.; Gupta, A.; Li, K.H.H. Large-scale piezoelectric-based systems for more electric aircraft applications. Micromachines 2021, 12, 140. [Google Scholar] [CrossRef]
- Hu, K.M.; Li, H. Multi-parameter optimization of piezoelectric actuators for multi-mode active vibration control of cylindrical shells. J. Sound Vib. 2018, 426, 166–185. [Google Scholar] [CrossRef]
- Selim, S.; Fevzi, C.B.; Ercan, E. Active vibration control of a blade element with uncertainty modeling in PZT actuator force. J. Vib. Control. 2019, 25, 2721–2732. [Google Scholar] [CrossRef]
- Koratkar, N.A.; Chopra, I. Analysis and testing of a Froude scaled helicopter rotor with piezoelectric bender actuated trailing edge flaps. J. Intell. Mater. Syst. Struct. 1997, 8, 555–570. [Google Scholar] [CrossRef]
- Koratkar, N.A.; Chopra, I. Analysis and testing of Mach-scaled rotor with trailing-edge flaps. AIAA. J. 2000, 38, 1113–1124. [Google Scholar] [CrossRef]
- Koratkar, N.A.; Chopra, I. Wind tunnel testing of a smart rotor model with trailing-edge flaps. J. Am. Helicopter Soc. 2002, 47, 263–272. [Google Scholar] [CrossRef]
- Fulton, M.V.; Ormiston, R.A. Hover testing of a small-scale rotor with on-blade elevons. J. Am. Helicopter Soc. 2001, 46, 96–106. [Google Scholar] [CrossRef]
- Fulton, M.V.; Ormiston, R.A. Small-scale rotor experiments with on-blade elevons to reduce blade vibratory loads in forward flight. In Proceedings of the 54th Annual Forum of the American Helicopter Society, Washington, DC, USA, 20–22 May 1998; AHS International: Fairfax, VA, USA, 1998; pp. 1348–1365. [Google Scholar]
- Roth, D.; Enenkl, B.; Dieterich, O. Active rotor control by flaps for vibration reduction-full scale demonstrator and first flight test results. In Proceedings of the 32nd Annual Forum of the European Rotorcraft Forum, Maastricht, The Netherlands, 12–14 September 2006; National Aerospace Laboratory: Amsterdam, The Netherlands, 2006; pp. 801–813. [Google Scholar]
- Rabourdin, A.; Maurice, J.B.; Dieterich, O.; Konstanzer, P. Blue Pulse active rotor control at Airbus Helicopters—New EC145 demonstrator and flight test results. In Proceedings of the 70th Annual Forum of the American Helicopter Society, Montreal, QC, Canada, 20–22 May 2014; AHS International: Fairfax, VA, USA, 2014; pp. 679–802. [Google Scholar]
- Lee, T.; Chopra, I. Design of piezostack-driven trailing-edge flap actuator for helicopter rotors. Smart Mater. Struct. 2001, 10, 15–24. [Google Scholar] [CrossRef]
- Crozier, P.; Leconte, P.; Delrieux, Y.; Gimonet, B.; Pape, A.L.; Rochettes, H.M. Wind-tunnel tests of a helicopter rotor with active flaps. In Proceedings of the 32nd Annual Forum of the European Rotorcraft Forum, Maastricht, The Netherlands, 12–14 September 2006; National Aerospace Laboratory: Amsterdam, The Netherlands, 2006; pp. 235–250. [Google Scholar]
- Tzianetopoulou, T. Design of an Improved Piezoelectric Actuator for Helicopter Rotor Control. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2001. [Google Scholar]
- Straub, F.K.; Kennedy, D.K.; Stemple, A.D.; Anand, V.R.; Birchette, T.S. Development and whirl tower test of the SMART active flap rotor. In Proceedings of the SPIE-The International Society for Optical Engineering, San Diego, CA, USA, 14–18 March 2004; SPIE: Washington, DC, USA, 2004; pp. 1–11. [Google Scholar] [CrossRef]
- Straub, F.K.; Anand, V.R.; Birchette, T.S.; Lau, B.H. Smart rotor development and wind tunnel test. In Proceedings of the 35th Annual Forum of the European Rotorcraft Forum, Hamburg, Germany, 22–25 September 2009; DGLR: Berlin, Germany, 2009; pp. 413–434. [Google Scholar]
- Stacey, S.; Connolly, N.; Court, P.; Allen, J.; Monteggia, C.; Oliveros, J.M. Leonardo helicopters active rotor programmes to improve helicopter comfort & performance. In Proceedings of the 74th Annual Forum of the American Helicopter Society, Phoenix, AZ, USA, 14–17 May 2018; Vertical Flight Society: Fairfax, VA, USA, 2018; pp. 2866–2882. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Young’s Modulus (GPa) | Poisson’s Ratio | Density (g/cm3) |
|---|---|---|---|
| TC4 | 109 | 0.34 | 4.44 |
| 30CrMnSiA | 196 | 0.30 | 7.75 |
| Parameter | Nominal Value | FEM Result | Error (%) |
|---|---|---|---|
| Dimensions (mm) | 7 × 7 × 60 | / | / |
| Mass (g) | 24 | 24.11 | 0.46 |
| Blocking force (N) | 1800 | 1702.65 | 5.41 |
| Maximum stroke (mm) | 68 | 67.97 | 0.04 |
| Stiffness (N/μm) | 25 | 25.05 | 0.2 |
| Actuation Voltage (V) | Theoretical Model (mm) | FEM Model (mm) | Measurements (mm) |
|---|---|---|---|
| 0 | −0.2762 | −0.2682 | −0.2749 |
| 40 | −0.0921 | −0.0887 | −0.1079 |
| 80 | 0.0921 | 0.0908 | 0.0980 |
| 120 | 0.2762 | 0.2704 | 0.2721 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Dong, L.; Yang, W. A Double-Acting Piezoelectric Actuator for Helicopter Active Rotor. Actuators 2021, 10, 247. https://doi.org/10.3390/act10100247
Zhou J, Dong L, Yang W. A Double-Acting Piezoelectric Actuator for Helicopter Active Rotor. Actuators. 2021; 10(10):247. https://doi.org/10.3390/act10100247
Chicago/Turabian StyleZhou, Jinlong, Linghua Dong, and Weidong Yang. 2021. "A Double-Acting Piezoelectric Actuator for Helicopter Active Rotor" Actuators 10, no. 10: 247. https://doi.org/10.3390/act10100247
APA StyleZhou, J., Dong, L., & Yang, W. (2021). A Double-Acting Piezoelectric Actuator for Helicopter Active Rotor. Actuators, 10(10), 247. https://doi.org/10.3390/act10100247