1. Introduction
To maintain civilization, humans require a transformation of their relationship with nature, which has largely been destroyed as a consequence of urbanization. Ironically, the nature conservation movement on the Japanese island of Iriomote, which promotes conservation areas for preservation purposes, resulted in increased demand for tourism in these areas and thus accelerated the speed of environmental destruction [
1].
Nevertheless, a sense of belonging to nature is essential for emotional balance. Japanese Zen Buddhism, for example, encourages deep meditation to achieve a sense of being one with nature [
2]. For many, irrespective of their religious or philosophical beliefs, a reverent attitude toward nature can provide a starting point for finding mental and physical well-being [
3]. Likewise, the sounds of birds, buzzing insects, gently swaying leaves, and the trickling of water convey the beauty of nature. Distancing ourselves from the technologies of modern life and evoking the beauty of nature can help us slow the pace of daily life and feel happier, healthier, and calm. Therefore, we feel it necessary to establish a concept, a method, and an interface—which collectively we call a sustainable interaction with ecosystems—with which we can achieve a feeling of belonging to nature. A crucial component of this idea is that humans and nature coexist without causing environmental destruction.
In this thesis, we propose our vision of human–computer–biosphere interaction (HCBI) by presenting a conceptual overview, related works, a conceptual design, an evaluation of designs, and a discussion. This vision aims to facilitate interactions between people and remote animals and environments by means of computer systems in a manner similar to present-day interactions between people, their pets, and their surrounding environment. We also propose physical and landscape-based approaches that support our view of a future society that incorporates HCBI-based designs and interfaces. We believe that we can achieve intangible but perceivable interactions between nature and the human society in a manner similar to interactions that exsisted in ancient times.
Although we do not intend to propose a solution to any one single problem in this study, we propose new HCBI-based designs and interfaces that we expect will support future societies via ongoing multidisciplinary research.
2. Background
Our relationship with nature constantly evolves as human civilization progresses, but natural environments are suffering ongoing destruction caused primarily by urbanization. Environmental movements that promote conservation and preservation through news and other media have ironically increased tourism in underdeveloped and pristine areas, which then accelerates the speed of environmental destruction.
Shown in
Figure 1, the Iriomote cat (
Felis iriomotensis) is a wild cat about the size of a domestic cat and is only found in Iriomote Island. It was discovered by Imaizumi in 1967 and is considered a “living fossil” because it has not evolved much from its primitive form [
4]. The Iriomote cat is currently the most threatened subspecies of leopard cats, with an estimated population of fewer than 100. These cats have dark brown fur, bushy tails, and are unable to sheathe their claws. In 1997, the Iriomote cat was declared a Japanese national treasure in response to urbanization, which are a very serious threat. Therefore, one-third of the island has been declared a reserve in which trapping of the cat is strictly prohibited. The International Union for the Conservation of Nature and Natural Resources listed the Iriomote cat as a critically endangered species in 2008 [
5].
Figure 1.
The Iriomote cat (
Felis iriomotensis) has been listed as an endangered species by the International Union for the Conservation of Nature and Natural Resources. Photo by Iriomote Wildlife Conservation Center [
4].
Figure 1.
The Iriomote cat (
Felis iriomotensis) has been listed as an endangered species by the International Union for the Conservation of Nature and Natural Resources. Photo by Iriomote Wildlife Conservation Center [
4].
As shown in
Figure 2, one of the most significant threats to the declining cat population is roadkill deaths [
6]. In Taketomi Chou, which is located in the cat habitat, there were fewer than 500 registered cars in 1979; the number of registered cars has increased to more than 3000 as of 2005 [
7]. This increase has been accompanied by a drastic increase in the number of cats struck by motor vehicles. Ironically, the rapid increase in registered vehicles and related cat deaths has been caused by improvements to the local economy owing to tourism [
8]. As the fame of the Iriomote cat spread, it added significant value to the island’s tourism industry. Consequently, numerous tourists visit the island in hopes of seeing the endangered cat before it becomes extinct.
As the number of tourists increased, so did the number of rental cars. This, in turn, caused the number of roadkills to increase. As news media outlets reported the roadkill cat deaths, interest in the cat increased further, thus resulting in even more tourists and hastening the animal’s decline toward extinction.
Figure 2.
A picture of an Iriomote cat killed by an eco-tourist’s car; vehicles driven by eco-tourists have become a significant threat to the species. Photo by Makoto Fukuda, Iriomote Wildlife Conservation Center [
9].
Figure 2.
A picture of an Iriomote cat killed by an eco-tourist’s car; vehicles driven by eco-tourists have become a significant threat to the species. Photo by Makoto Fukuda, Iriomote Wildlife Conservation Center [
9].
This species being on the verge of extinction is just one example of many. If information technology could be used to provide humans with a simulated experience of being close to nature while promoting the necessity of nature conservation, the number of roadkills of the endangered species in world heritage areas by eco-tourists might decrease. Conservation scientists have actively advocated environmental protection by disseminating information on contemporary critical situations through the use of state-of-the-art information technologies, and by reaching out to people through imagery displaying endangered species dying in roadkills (
Figure 2); however, such techniques can never be more than a simple human–computer interaction (HCI), and thus they will be ineffective in preventing further deaths and perhaps extinction.
The key point lacking here is not knowledge or technology but rather an interface through which we can commune with nature. Such an interface is especially necessary to protect endangered areas, wherein the environment is being destroyed through human activities. Therefore, a methodology that separates humans from natural environments that require preservation and simulataneously allows humans to experience those enviroments is necessary, lest we see more destruction and extinctions.
3. Conceptual Design
Illustrated in
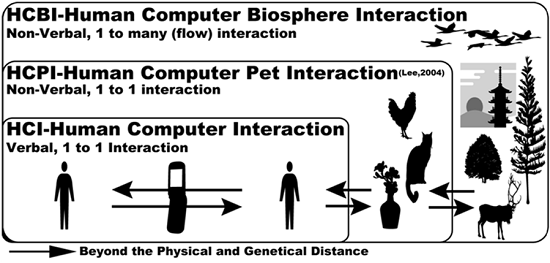
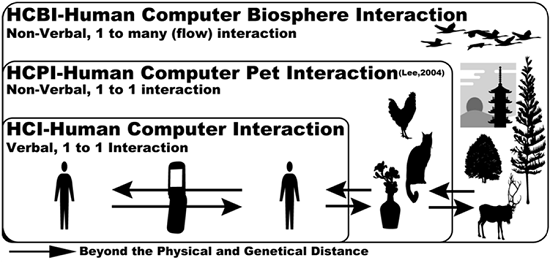
Figure 3, the HCBI concept we propose is an extension of HCI and human–computer–pet interaction (HCPI). HCI is a “discipline concerned with the design, evaluation and implementation of interactive computing systems for human use, and with the study of major phenomena surrounding them” [
10]. In our research, we propose HCBI as an extension of HCI and HCPI from countable objects, pets, and plants to their auditory environments, which are uncountable, complex, and non-linguistic soundscapes.
Figure 3.
Human–computer–biosphere interaction (HCBI) concept [
6], an extension of human–computer interaction (HCI) and human–computer–pet interaction (HCPI). Copyright 2009 Hiroki Kobayashi, with permission from [
11].
Figure 3.
Human–computer–biosphere interaction (HCBI) concept [
6], an extension of human–computer interaction (HCI) and human–computer–pet interaction (HCPI). Copyright 2009 Hiroki Kobayashi, with permission from [
11].
Computer-supported cooperative work uses computer systems to exchange messages that support task-specific activities. For example, we routinely exchange our ideas, thoughts, theories, and other messages by encoding and decoding words via computer media, cell phones, email, and chat systems; however, in our daily social interactions, we also unconsciously exchange and share a significant quantity of non-verbal cues related to emotional and physical states. This information helps us find appropriate contexts during the verbalization process so that the intended message can easily and successfully be received and understood by its intended recipient.
The purpose of “Tsunagari Communication” introduced in [
12], is to foster a feeling of connection between people living apart from one another by exchanging and sharing such cue information. One example of this is the “family planter system” shown in
Figure 4, that uses network and HCI technologies.
Implicit information communication enables a new form of nonlinguistic and nonverbal expression and interaction among different species, which is unrestrained by physical distance. Lee
et al. [
13] presented an HCPI, a novel type of physical interaction and symbiosis between humans and pets, using a computer and the Internet.
Botanicalls [
14] was developed to provide a new method for plants and people to interact in order to develop better relationships that transcend physical and genetic barriers. In this system, computers become an intermedium for different biosphere species in a way that allows non-linguistic expression to be perceived and understood by individuals of different species, something which would appear to violate the rules of linguistic science. The Botanicalls system enables plants to place phone calls when human help is required. For example, when a plant on a Botanicalls network needs water, it calls a person and asks for what it needs. This is achieved via sensors that monitor the moisture content in the soil and initiates a phone call when the moisture level breaches the threshold. Morover, when people phone the plants, the plants apprise callers of their botanical condition.
Figure 4.
A “family planter” terminal on the Botanicalls network; such terminals are connected to each other through a network; the system detects human motion and shares such events with other terminals in real time, the optical fibers at the top of the terminal lighting up to indicate when a human is detected, then rotating to orient to the human’s movements; these exchanges are designed to blend in with the everyday life of its users [
12].
Figure 4.
A “family planter” terminal on the Botanicalls network; such terminals are connected to each other through a network; the system detects human motion and shares such events with other terminals in real time, the optical fibers at the top of the terminal lighting up to indicate when a human is detected, then rotating to orient to the human’s movements; these exchanges are designed to blend in with the everyday life of its users [
12].
Further, HCI technologies can be employed in wildlife monitoring to remotely observe target animal behavior. Such usage allows every element of a target animal, from its movement pattern to excrement disposal, to be monitored by biology researchers over the course of the animal’s life. A normal system incorporates radio tracking and positioning by utilizing a very high frequency (VHF) signal transmitter collar and receiver; a transmitter collar is shown in
Figure 5. In the case of the Iriomote cat, researchers can use triangulation to estimate the current position of a monitored cat from the signal strength of its radio transmitter.
Figure 5.
Very High Frequency (VHF) signal transmitter collar used in the positioning system.
Figure 5.
Very High Frequency (VHF) signal transmitter collar used in the positioning system.
Unfortunately, regardless the level of advancement of technology, these are human-centric interactions. We expect some perceivable feedback from others as a response to our inputs before we end an interaction. In contrast, in our daily lives, there are many important nonhuman-centric interactions, including the sounds of birds, insects, swaying leaves, and trickling water, all of which can implicitly imprint the beauty of nature on our minds. When we are emotionally stressed, recalling the beauty of nature can help us recover a sense of wellbeing. A crucial factor here is not the means of conveyance,
i.e., words or language, but rather the sense that there is “something” hovering around us or an atmosphere that we cannot precisely identify [
2].
In previous studies, as depicted in
Figure 6, we participated in the development of a networked bio-acoustic streaming and recording system with which environmental sounds in a subtropical forest on Iriomote Island were continuously streamed in real time via a networked microphone [
15]. The technology behind this networked bio-acoustic streaming and recording system is also used for AQUASCAPE, the stethoscope for the Earth’s waters [
6], through which Internet users can listen to aquatic sounds in real time. These include, for example, water movements of a pond in Tokyo, living creatures in a garden in Kyoto, and a street in Mumbai, India.
Figure 6.
Live sound from a subtropical forest on Iriomote Island is collected via a pair of networked microphones that are wrapped in a thick black sheet of waterproof sponge and a plastic hard mesh, then tied to a tree trunk; such live sounds have been streamed to users in real time, 24 h a day since 1997. Photo (right) by SoundBum [
6].
Figure 6.
Live sound from a subtropical forest on Iriomote Island is collected via a pair of networked microphones that are wrapped in a thick black sheet of waterproof sponge and a plastic hard mesh, then tied to a tree trunk; such live sounds have been streamed to users in real time, 24 h a day since 1997. Photo (right) by SoundBum [
6].
Thus, the goal of HCBI interaction is the employment of multisensory devices to facilitate the exchange of information between humans and wildlife, thereby influencing a target species remotely through the use of multimedia technologies. This study is not merely a passive attempt to monitor, transfer, process, and archive information on remote environments by using multimedia systems; we also aim to facilitate interactions among people, animals, and remote environments in a manner similar to the interactions currently possible between people, their pets, and their daily environment. Our approach here is a novel two-way interaction method that includes physical separation, information connectivity, and ecological neutrality, each of which is described below.
3.1. Physical Separation
Contemporary information technologies enable communication over large distances in real time through various networks without direct contact between callers and receivers.
3.3. Ecological Neutrality
The concepts of physical separation and information connectivity combine to support non-verbal information interactions between humans and the biosphere; however, these are “virtual” interactions, and their environmental impact never exceeds their virtual impact. This allows us to create such virtual impacts on wild animals without physically interacting with them. Therefore, food chain information can be exchanged between humans and animals in a way that eliminates the possibility of damage to the biosphere.
Combining these three aspects, we have HCBI and its potential for reducing the degree of incompatibility between humans and the environment.
4. Interaction Design
Natural communities contain a wide variety of life forms that interact with one another [
16], and it is generally agreed that the essence of ecology is the study of ecological interactions between species in animal communities [
16]. In particular, animal communities in tropical forests have extremely complex interactions involving numerous species [
16,
17], with the structure of natural sound in rainforests convincingly demonstrating the extraordinary relationships that exist between the innumerable insects, birds, mammals, and amphibians that inhabit these environments. If one creature starts vocalizing, others join the chorus [
18]. These bio-acoustic interactions between animals vary depending on the biological diversity of the natural habitat.
In our research, we used bio-acoustical information to develop a wildlife–computer interaction model. More specifically, we propose a novel cybernetic interface that uses mobile technology to create human–wildlife bio-acoustical interactions. To establish interactions with wildlife, the monitoring system artificially creates a “prey field” to control the movements of the target wildlife under the following three conditions: predator–prey relationship; interspecific communication; and interspecific communication in mixed reality. Each of these are discussed below.
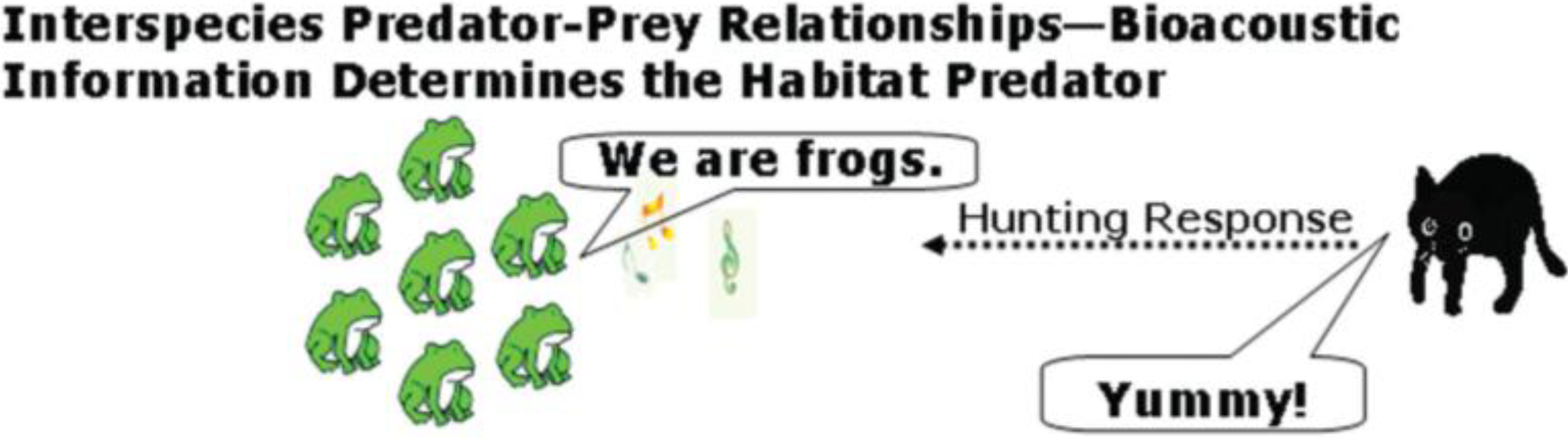
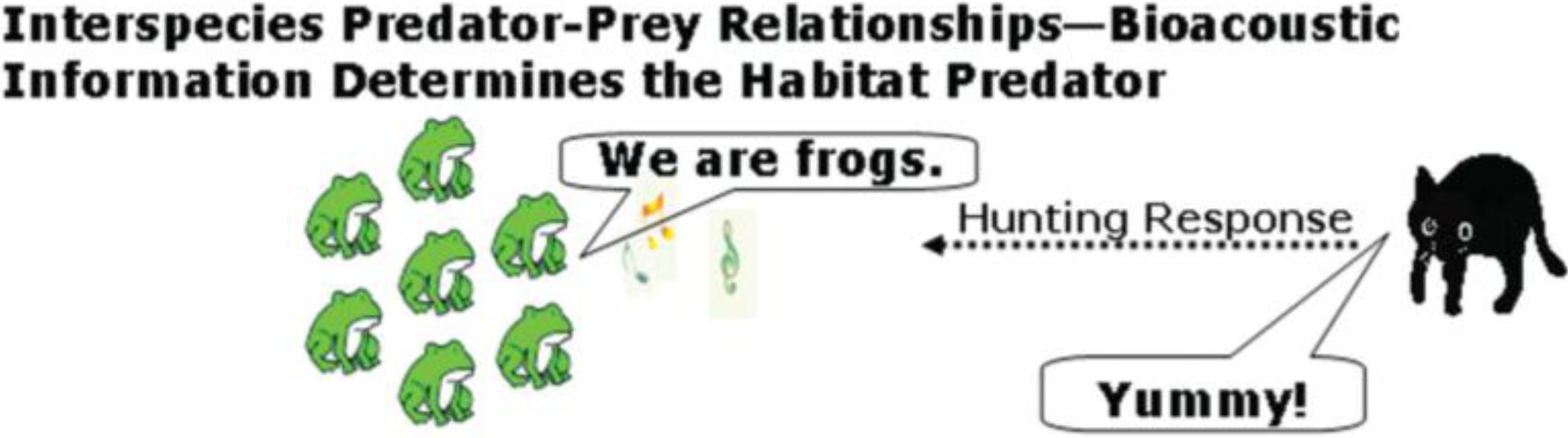
Predators hunt for prey in their native habitat. Bio-acoustical information is one of the signals used by predators to detect the existence of prey. For example, in natural environments, frogs respond to the initial call, resembling that of a real frog, generated vitually and begin singing in chorus, as shown in
Figure 7. The predator then detects the emergence of a prey field using acoustic cues acquired from the frog chorus before approaching and entering the prey field near the system to hunt. Bio-acoustical interaction has thus been established and a predator hunts prey in its habitat, as depicted in
Figure 8. Bio-acoustic information is one of the determining factors by which a predator detects the existence of prey in its habitat [
19]. The absence of predators indicate a lack of prey in the habitat.
Figure 7.
Intraspecies communication. Copyright 2009 Hiroki Kobayashi, with permission from [
11].
Figure 7.
Intraspecies communication. Copyright 2009 Hiroki Kobayashi, with permission from [
11].
Figure 8.
Predator-prey relationship. Copyright 2009 Hiroki Kobayashi, with permission from [
11].
Figure 8.
Predator-prey relationship. Copyright 2009 Hiroki Kobayashi, with permission from [
11].
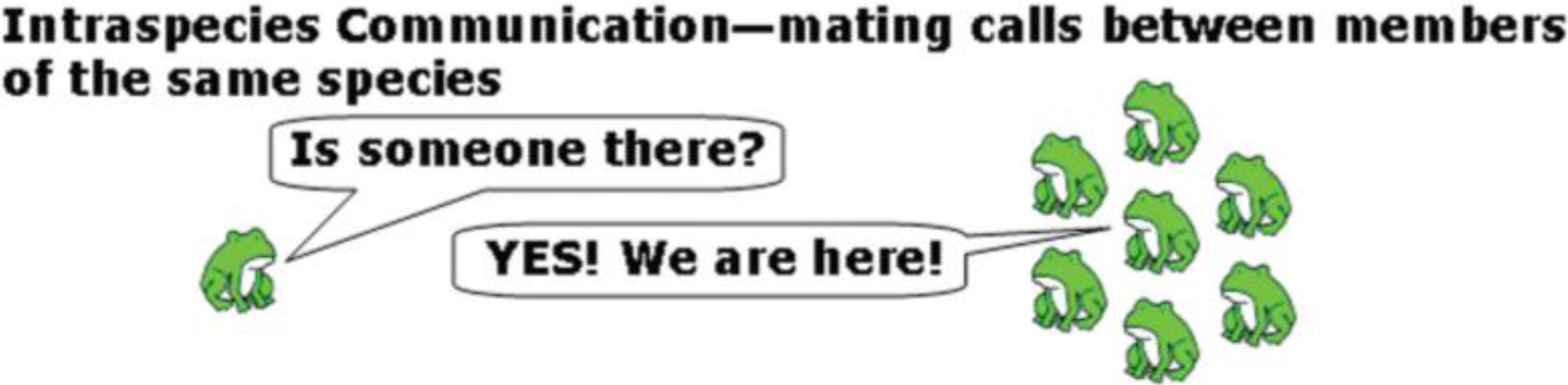
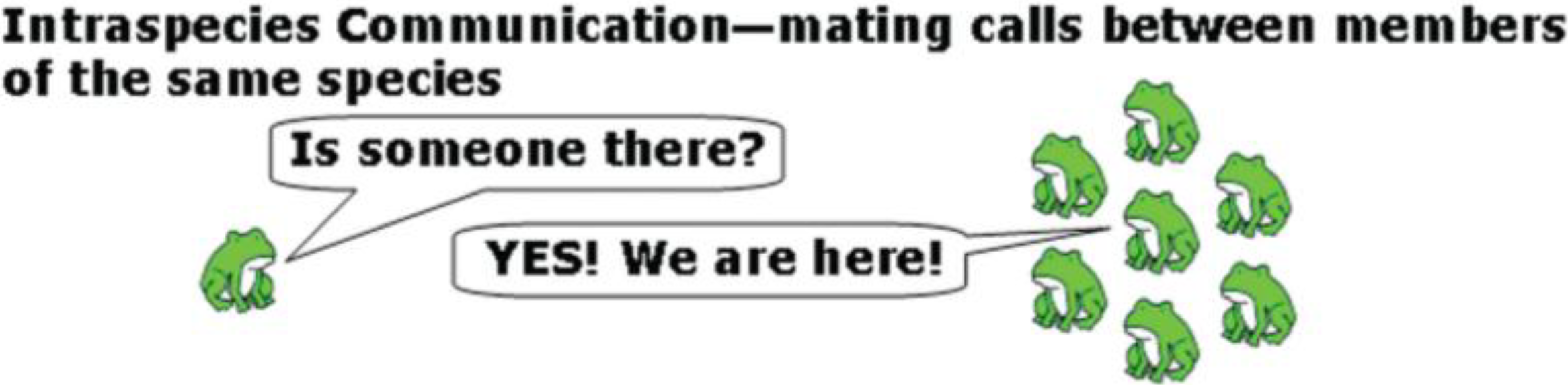
Intraspecies communication is a chorus produced by a group of members of the same species, as depicted in
Figure 9, similar to the packet Internet grouper command within the Internet control message protocol between two computers [
20]. More specifically, a single individual, the caller, begins by calling to other individuals of the same species to confirm their presence [
18]. Other members of the same species then randomly respond to the call and thus report their existence to the caller.
Figure 9.
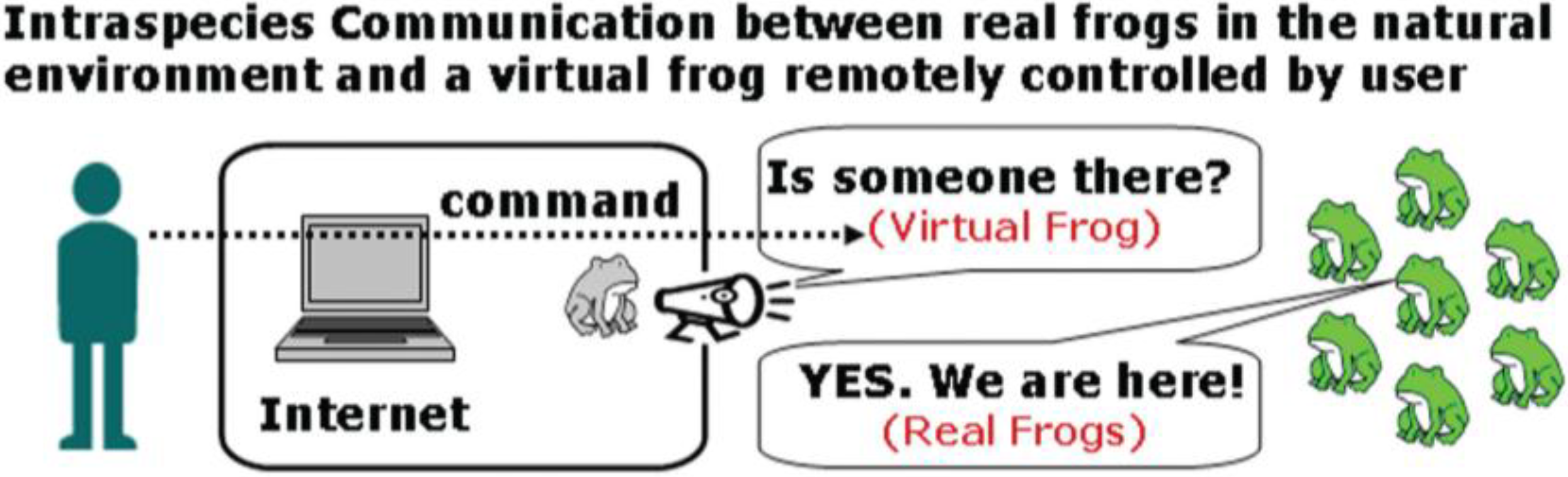
Intraspecies communication in mixed reality. Copyright 2009 Hiroki Kobayashi, with permission from [
11].
Figure 9.
Intraspecies communication in mixed reality. Copyright 2009 Hiroki Kobayashi, with permission from [
11].
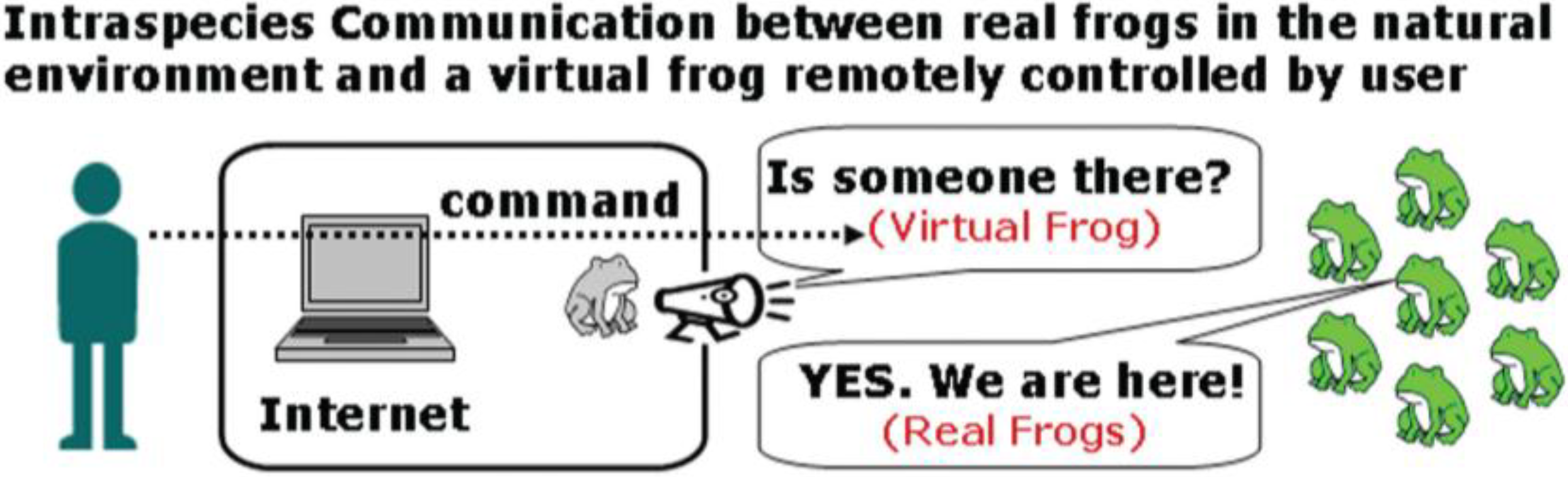
A species can conduct interspecific communication in mixed reality.
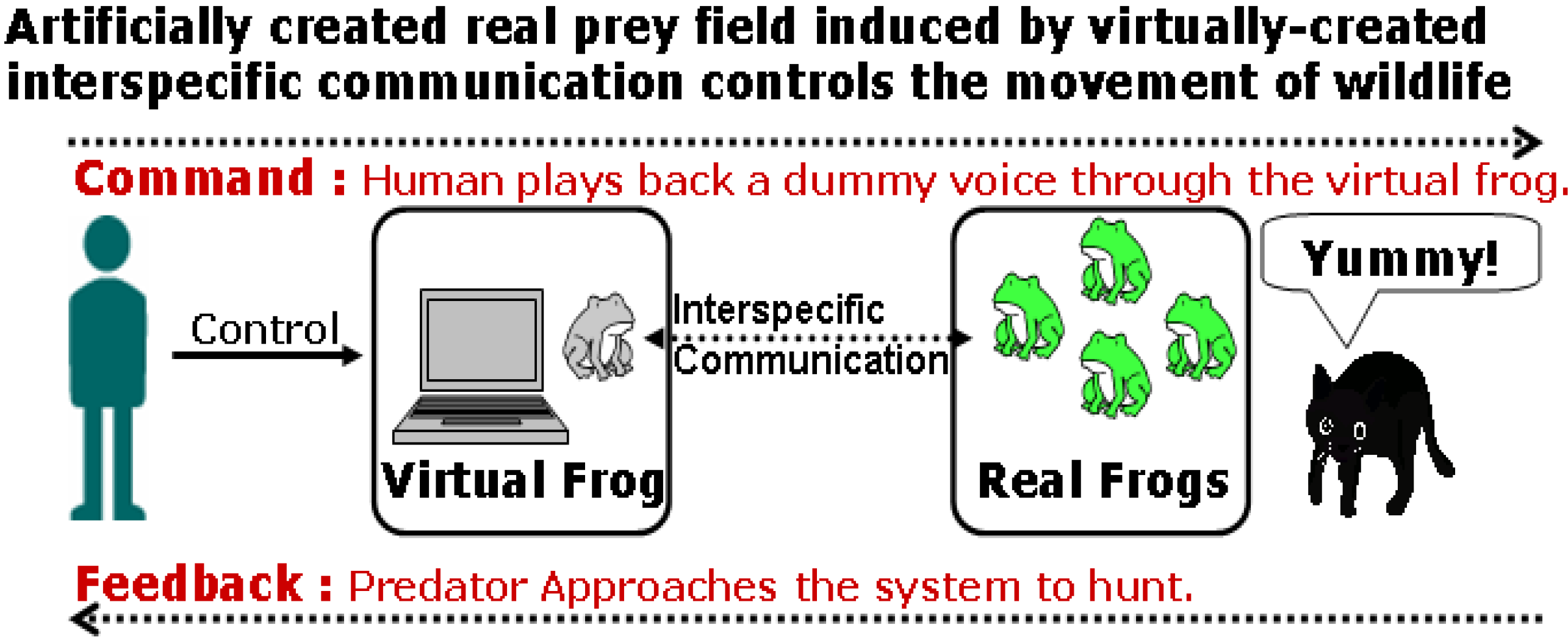
Figure 10 shows a user playing a pre-recorded sound of an initial call from an acoustic speaker. The speaker is placed in the natural environment and remotely controlled over the Internet. Real frogs answer the initial call and report their existence. The initial call, which is a virtual call broadcast from the speaker, can deceive the real frogs into believing the call was made by another real frog in the area.
Figure 10.
Bio-acoustical interaction instigated to control the behavior of a target species.
Figure 10.
Bio-acoustical interaction instigated to control the behavior of a target species.
To establish wildlife computer interaction, we propose an interface that artificially creates an actual prey field to influence the movements of the target wildlife, as shown in
Figure 10, under the three conditions mentioned above. The interaction method is designed to proceed as follows:
A user remotely controls a computer that initiates interspecific communication with real frogs by broadcasting an initial call through a speaker placed in the natural environment;
Real frogs in the natural environment respond to the initial call. The virtual and real frogs start singing in chorus;
The predator acoustically detects the emergence of the prey field through the frog chorus;
The predator enters and stays in the prey field near the system to hunt, thus establishing a bio-acoustical interaction.
To evaluate this hypothesis, we participated in the construction of a system designed to evaluate the bio-acoustic interaction system using a networked remote-sensing embedded system. In the evaluation system, instead of a user controlling the system to initiate interspecific communication, the system monitors the movements of the target wildlife remotely.
The challenge currently faced by conservation managers is the development of behavior control systems for wild animal species whose positions and movement patterns are both unknown and unpredictable in the natural environment. An HCI system of this type needs to be compact enough to be carried in the field by researchers, capable of being controlled remotely by system engineers, and “smart” enough to non-verbally interact with wildlife. Furthermore, such a system must be capable of operating under extreme conditions found in hot and humid subtropical forest environments and until the time the target wildlife species arrives at a monitoring site. This requires the use of weather-resistant, energy-efficient, and highly stable equipment.
5. Evaluation
To evaluate the affects of HCBI, it was first necessary to develop a system that would allow humans to interact with a remote biosphere. In this section, we focus on the development of such a system that allows users to interact with remote wildlife through the use of acoustic ecology aspects. In this manner, it was possible to ascertain whether practical human–biosphere interactions using computers are possible.
Wildlife monitoring is the act of observing animal behaviors. From movement patterns to excrement behaviors, biology researchers observe all elements of an animal’s life by means of various tools. The following three observation tools are most commonly used: radio tracking for estimating locations; an automated analog camera system for visual monitoring; and an automated analog video system for animal movement monitoring.
In the subsections below, we review the technologies, methodologies, and weather issues related to wildlife monitoring; thereafter, we provide details regarding the hardware and software employed, followed by a summary of our results.
5.1. Technical Limitations
A radio-tracking system usually comprises a VHF signal-transmitter collar and receiver, as shown in
Figure 5. For our system, an Iriomote cat, which is desired to be observed in its natural habitat, is first fitted with a VHF signal transmitter. Observers then use triangulation to estimate the cat’s position from the transmitted signal. The VHF transmitter is equipped with an analog circuit that generates a radio signal and a small lithium battery that lasts between two and three years; however, because of the characteristics of the analog circuit, slight frequency changes in the generated signal can occur after several months. Consequently, it can become increasingly difficult to estimate the position of a target animal by triangulation. The observer must first estimate the frequency at which the signal would be detected in order to tune a receiver to the desired signal. This frequcy may have shifted from the one originally specified.
In studies employing this methodology, it was found that positioning accuracy decreased toward the end of the transmitter’s life. Although using a GPS-based tracking collar would appear to be an effective solution to this problem, Iriomote cats are too small and light to carry the high-capacity battery that conventional GPS devices require. Use of small lightweight batteries that only last for a short time would require frequent recaptures of the target animal for battery replacement, which could cause a variety of undesirable anthropogenic effects, such as stress-induced illnesses, and therefore would be contrary to the aims of nature conservation.
Furthermore, employing GPS technology in the monitoring of such a small terrestrial mammal is not practical because of interference with the GPS satellite signal by vegetation before it reaches the collar. Consequently, during this study, analog VHF transmitter collars were used, considering the tradeoff between the difficulties involved in estimating peak frequency signals and the need to avoid disruption of the target species.
As shown in
Figure 11, analog automatic still and movie cameras were set up by researchers in numerous locations to capture images of the cats; however, there are several drawbacks associated with the use of analog equipment, particularly the fact that still cameras only have 36 photographs on a roll of film and analog movie cameras have very high power consumption. These factors required observers to hike to the monitoring sites regularly to replace film or batteries, thus making it difficult to conduct long-term observations in locations that were difficult to visit regularly at that time (2007). Although the use of infrared (IR) sensors and waterproof digital cameras could be considered, the time delays associated with focusing and shutter release is problematic, often having the target move out of the frame before the picture is actually taken.
The advantage of film cameras is that there is virtually no delay between the camera being triggered and the photograph being taken, as the camera is always on. Digital models tend to “sleep” to save battery power when idle; therefore, once a camera is triggered, there is a slight delay as the camera “wakes up”; however, this delay is minimal in modern digital models, particularly among the more expensive models [
21].
Figure 11.
An automated photograph system with an infrared sensor.
Figure 11.
An automated photograph system with an infrared sensor.
Finally, the gradual shift in the transmission frequency over time, which reduces positioning accuracy, is also problematic. Although a newer positioning system would solve the accuracy problem, battery weight and radio disturbance remain critical problems. Likewise, using automatic analog still and video cameras limits recording time because of limited data storage and battery capacity. Thus, it was not possible simply to apply available technologies to the HCBI evaluation of this study, and it will be necessary to develop more efficient systems that combine digital and analog tools in the future.
5.2. Methodological Limitations
In addition to the aforementioned technological problems regarding analog systems, another critical methodological problem existed. The various observation tools mentioned above are all one-way observation systems, and there was no appropriate method for facilitating two-way interactions between a computer and wildlife.
As a result, observations only occurred under the following conditions. First, the monitoring system had to be set up at an observation site, and a researcher had to activate its power supply. The active system then waited until an animal happened to come within range. If the animal moved in front of the system, its body was detected via sensors (e.g., body heat, infrared trigger beam, pressure-sensitive pads, etc.) and the system response was triggered (e.g., the automated analog camera system took a photograph of the animal). Ultimately, the animal left the monitoring site and the system ceased making observations. If the animal subsequently returned to the site, these steps were repeated.
Even if the current methodology is improved by adding additional functions, it remains inefficient. First, there is no guarantee that the sensor will correctly detect the animal. In fact, insolation heat often triggers IR-activated systems, resulting in photographs that show nothing but the location itself. Second, the likelihood of the system taking a “good” photograph of a target animal facing the camera is very low. For example, of the 60 monitoring sites on Iriomote Island fitted with automated analog camera systems, each of which is visited at two-week intervals by researchers to replace batteries and film, the probability that just one of these sites will produce a usable photograph of a single animal averages one “good” image per month.
These problems and limitations necessitated the need to design a methodology that facilitated two-way interactions between computers and animals, as well as a methodology to detect animals more effectively.
5.3. Weather Durability
Excessive humidity was a very important consideration in our system design process. Iriomote Island is too humid to allow a system to be operated continuously. According to data obtained from the Japan Meteorological Agency [
22], the average annual humidity in the Tokyo area from 1961 to 2006 was less than 70%. In comparison, the average annual humidity on Iriomote Island during the same period was approximately 80%. Consequently, any system designed to work at humidity levels typical of the Tokyo area could not be guaranteed to work on Iriomote Island, especially since the island’s humidity often exceeds 90%.
In short, sensitive digital devices do not work well outdoors on the island. An AXIS 2411 video server (Axis Communications, Lund, Sweden) was first used to capture and digitize infrared images. According to the product specifications of the video server, it was designed to operate under humidity conditions of 20%–80%. During the system design process in Tokyo, which was conducted at average humidity levels of less than 80%, the video server worked perfectly; however, during the second stage of development, when we transported the system to the island, the video server often malfunctioned because of the excessively humid environment. Further, there were no tools on the island with which the sensitive digital device could be repaired; therefore, it was not possible to easily or immediately resolve the problem. Therefore, subsequent development efforts undertaken in Tokyo paid careful consideration to the effects of high humidity on devices; however, since fully waterproof equipment is very expensive, we decided to use normal equipment housed in an extra case that provided weatherproofing.
5.4. Hardware Description
After considering the above issues, we developed a networked remote embedded system for evaluating bio-acoustic interactions. The system utilizes a portable networked embedded Linux system with multifunctional sensors designed for efficient observation of endangered species.
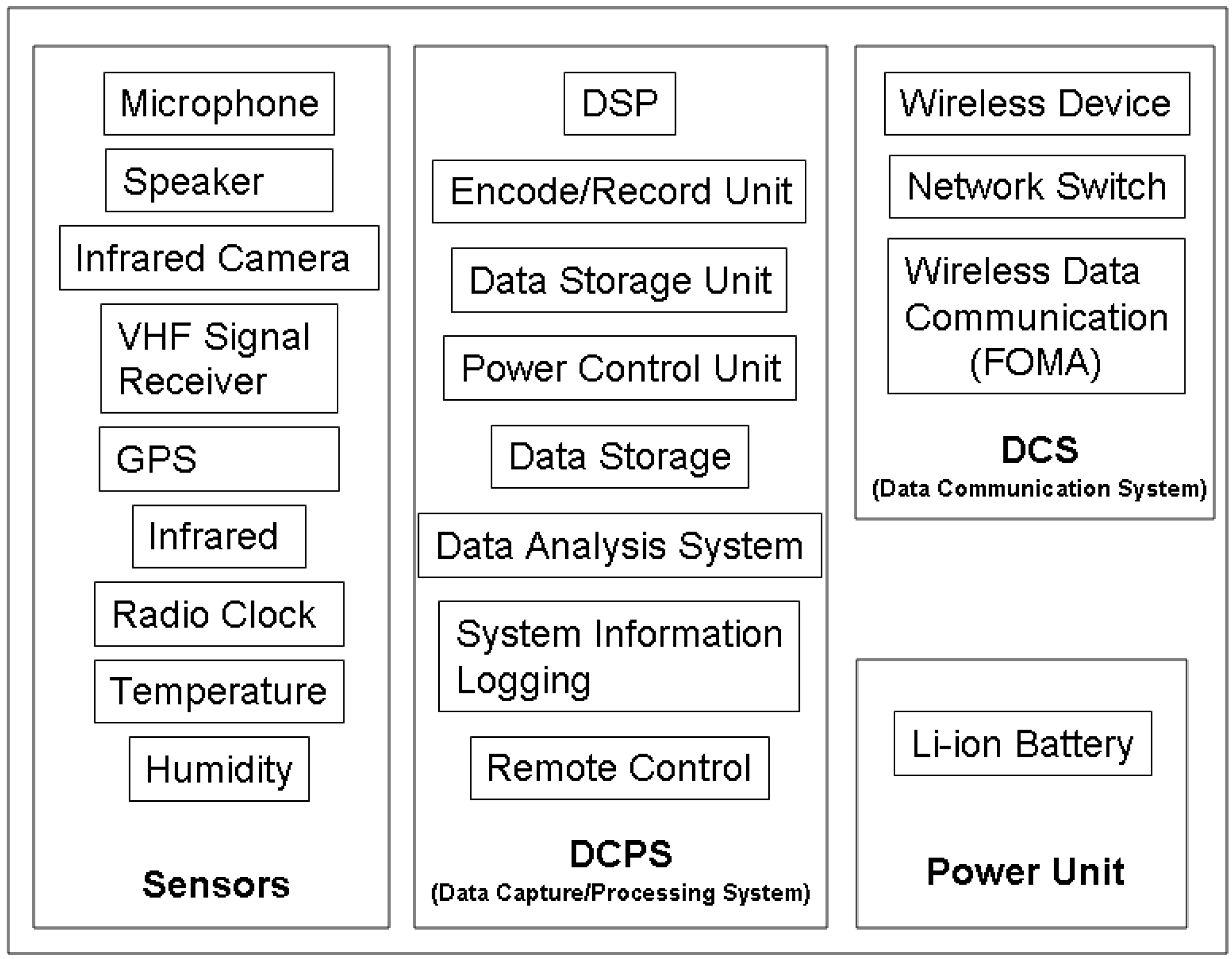
Figure 12 shows a picture of the hardware, while
Figure 13 provides an overview of the system components. Key system components are described in the subsections below; however, we first provide a summary of the devices associated with the system.
The system is equipped with the following eight different devices: a weatherproof microphone; a weatherproof speaker; an infrared camera; a VHF signal receiver; and temperature, humidity, GPS and radio clock, and infrared sensors. The weatherproof microphone is used to record bio-acoustic signals in the field, whereas the speaker is used to play audio recordings. The microphone and speaker combination is designed to act as a sound trap for monitoring biological behavior of wild animals.
Figure 12.
Our system’s main unit (gray box) and battery unit (black box).
Figure 12.
Our system’s main unit (gray box) and battery unit (black box).
Figure 13.
Overview of system components.
Figure 13.
Overview of system components.
The infrared camera controlled by the infrared sensor is designed to capture digital images of animals passing in front of the monitoring system at any time, day or night. The VHF signal receiver monitors signals broadcast from the small transmitters affixed to the neck of target animals. GPS and radio clock sensors were used to calculate the exact location and precise times at which the images of wild animals were recorded. Temperature and humidity sensors continuously measured and logged temperature and humidity in the field. In addition to
Figure 13,
Table 1 summarizes the hardware specifications used in our study.
Table 1.
Hardware specifications.
Table 1.
Hardware specifications.
| Audio, Storage, and Communication CPU | Intel XScale Processors 400 MHz, 64 MB SDRAM |
| Video Unit CPU | ETRAX 100 LX 100 MHz, 64 MB SDRAM |
| Power Control and Signal Detection Unit CPU | ETRAX MCM 100 MHz, 16 MB SDRAM |
| Storage Unit | Compact Flash Interface |
| Communication Unit | 10/100 Base-T Ethernet |
| FOMA 384 kbps |
| Bluetooth 2.0 |
| Wireless LAN IEEE 802.11/b/g |
| GPS (DGPS, WAAS, EGNOS and MSAS) |
| Radio Clock (JJY, NIST) |
| Sensors Unit | Infrared Camera (4 ch) |
| Microphone |
| Speaker 150–20,000 Hz, 85 dB 1 W/1 m |
| Temperature |
| Humidity 5%–95% ± 5% |
| Radio Tracking (2 ch) 0.1–1299.99995 MHz |
| Heat Sensor |
| Electrical and Environmental Requirements | Line Voltage: DC 12 V |
| Operating Temperature: to 70 °C |
| Relative Humidity: 0%–100% |
| Size and Weight | Main Unit: 51.7 × 39.2 × 22.9 cm, 15 Kg |
| Battery: 34.2 × 29.5 × 15.3 cm, 3.8 Kg |
5.4.1. Data Capture/Processing System (DCPS) Description
From
Figure 13, the data capture/processing system (DCPS) captures and processes signals obtained from the sensors, and saves and transfers data through the data communication system (DCS). The DCPS consists of the following eight subunits: analog-to-digital converter; audio encode/record; data storage; power control; VHF digital signal processor (DSP); system information; remote control; and system-control timer units. The analog-to-digital converter converts analog signals from the microphone, infrared camera, signal receivers, and temperature and humidity sensors into digital-format files. It also converts digital signals and audio data into analog signals that can be played as sound files through the speakers. All captured and preloaded data are stored on a compact flash drive.
To reduce power consumption, the power control units automatically regulate power usage by turning subunits on and off as required. The VHF DSP unit monitors radio-tracking signals from receivers to estimate the location of animals wearing the small radio-signal transmitters. When the animals approach the vicinity of the monitoring system, the VHF DSP unit sends a request to the power control unit to turn on the other units. Data can then be analyzed by open source software running on a Linux-based embedded system.
All units and their subsystems are remotely controllable through a command-line interface (CLI), such as one of various shell programs. A timer equipped with a radio clock and GPS-based correction controls the power circuits through an operation scheduler, which controls the time intervals of the observation period.
5.4.2. Data Communication System (DCS) and Power Unit
Again from
Figure 13, the DCS provides a 100 Mbps Ethernet connection with a network switch for all DCPS units. It also provides an Internet connection to the DCPS units through a wireless freedom of mobile multimedia access (FOMA) data communication card developed by NTT DoCoMo, Inc. (Tokyo, Japan) [
23]. The Internet data communication line runs at 384 kbps and provides monitoring capabilities from remote locations. In the future, an additional wireless data communication device will be built into the DCS such that observed data can be shared with mobile kits at other locations. The power unit is housed in a separate weatherproof case and provides more than one month of electric power. It connects to the system via a weatherproof power cable. The power units are rechargeable Lithium-ion batteries, and recharging takes a maximum of eight hours.
Our hardware system was designed to facilitate bio-acoustic interactions between remote users and wildlife via a computer network. Using prerecorded animal calls, the system produces bio-acoustic feedback that induces reactions from members of the target wildlife species and affects their behavior in remote locations.
The interaction steps are shown in
Figure 10. Our system is unique in that people can observe the reactions of the target wildlife species when the system detects the approach of wildlife by VHR radio-tracking and heat detection. Observers are alerted to the presence of the target wildlife species via email.
5.5. Software Design and Functionality
Our system uses Linux kernel 2.6 in flash and customized software. The advantage of the flash is its simplicity and small size, and that it does not require any specific operating environment for custom software. Since the time spent on software implementation was the most important constraint on our time, we made extensive use of BusyBox commands [
24] to code custom software in the shortest possible time.
Because Linux kernel 2.6 is a standard widely distributed and general-purpose operating system, it was necessary to develop customized software for controlling the entire monitoring system. After an extensive literature review, the software was written with a combination of different programming languages, including C, C++, and BusyBox commands. The final software supports the three management functions described below.
The boot function shown, with pseudocode shown in
Figure 14, is a second-stage program loaded and executed after a call by the onboard power time module. Depending on the detection of a VHF radio-tracking signal from the target wildlife species, this function decides whether the system should employ the observation sequence function or remain in standby mode.
Figure 14.
Pseudocode for the boot function.
Figure 14.
Pseudocode for the boot function.
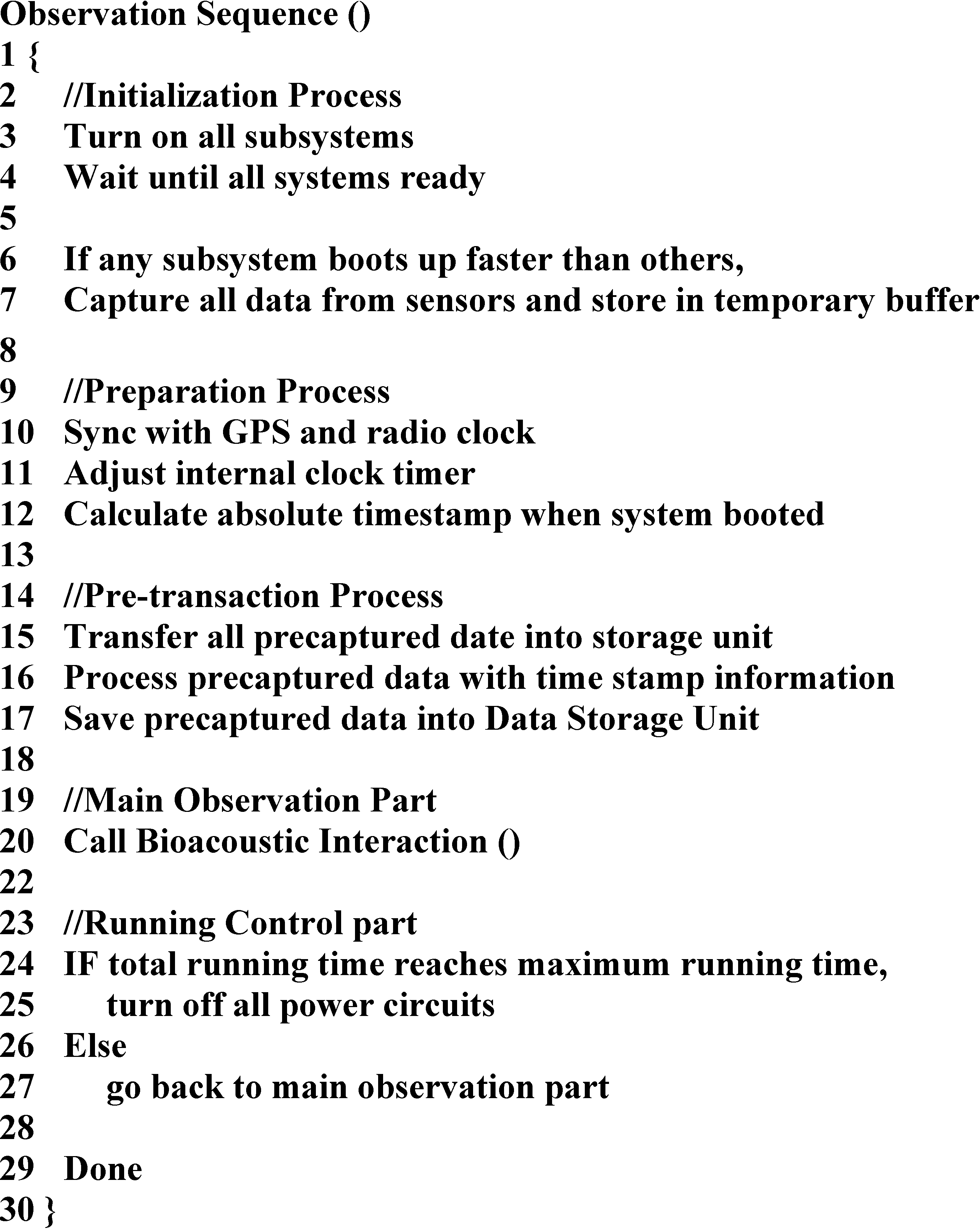
The observation sequence function, with pseudocode shown in
Figure 15, is a second-stage program loaded and executed after a call is received from the boot function. This function turns on the power circuits of all subsystems, performs pre-transactions, calls the main bio-acoustic interaction function, then turns off all power circuits when the interaction is determined to be complete.
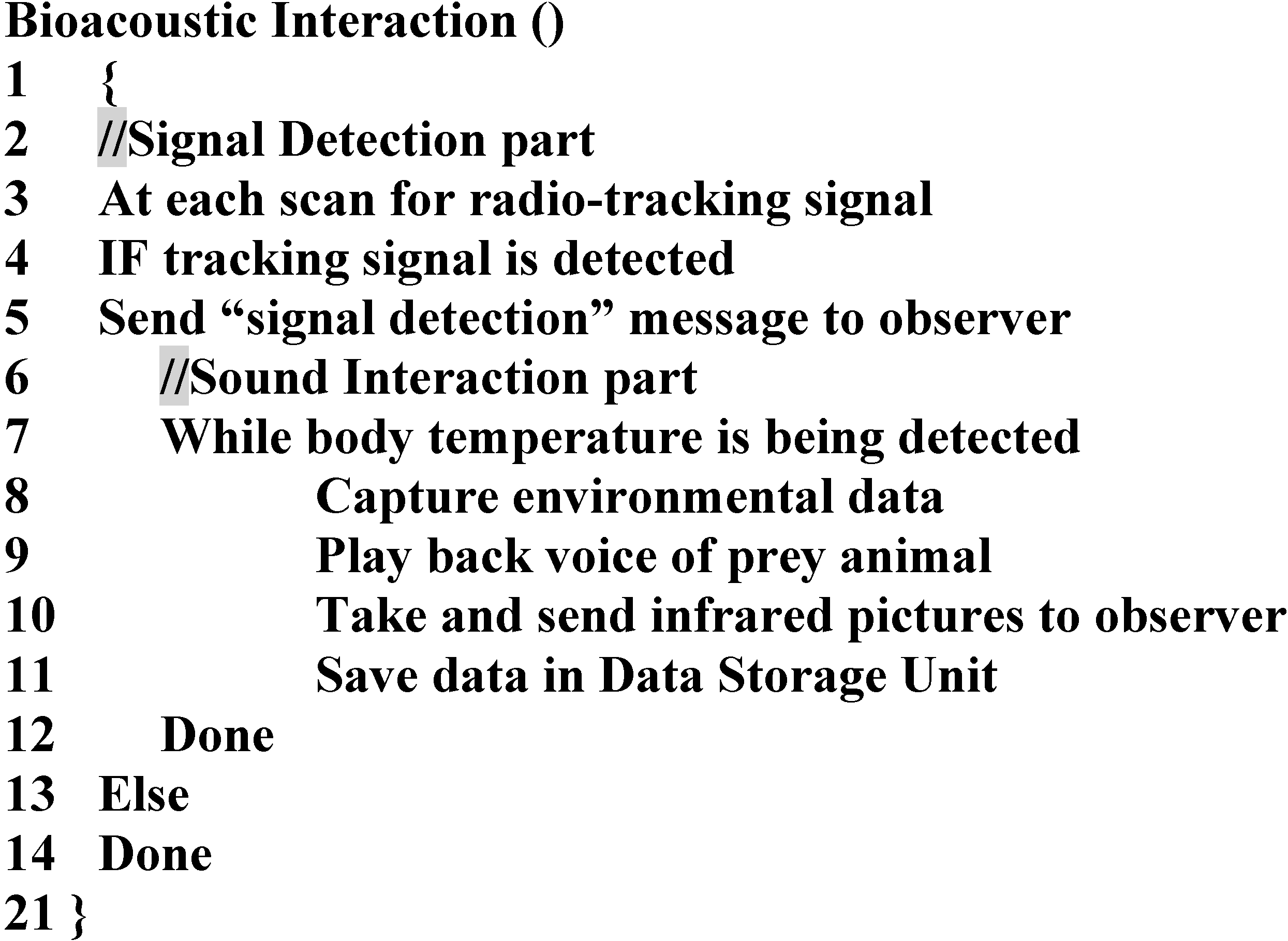
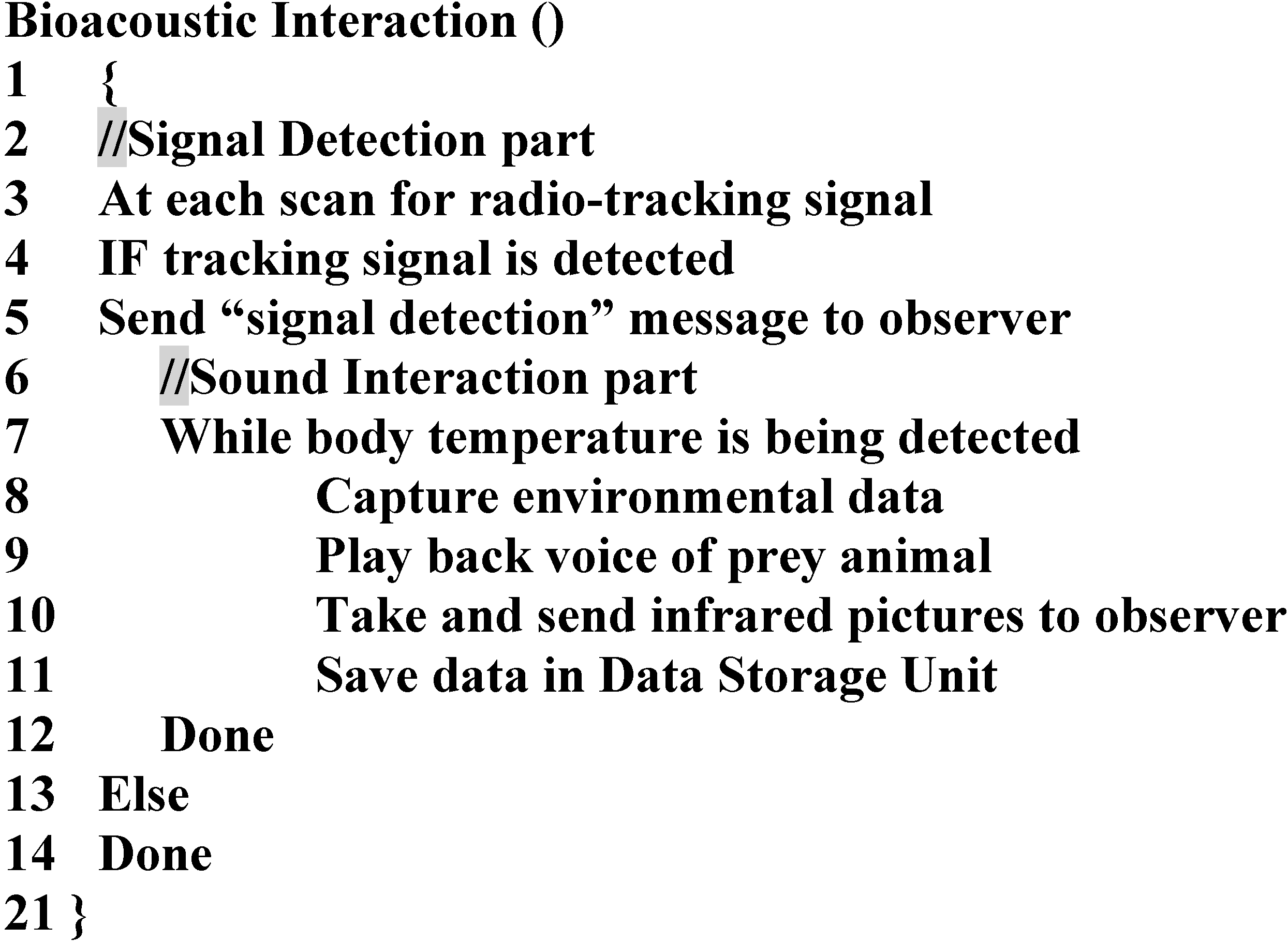
The bio-acoustic interaction function, with pseudocode shown in
Figure 16, is responsible for initiating the sound interaction following VHF signal detection. The signal detection module then performs another scan to detect the radio signal one final time before executing sound interaction. This is done to ensure that an animal equipped with a radio collar is still within 20 m of the system when the interaction takes place.
Figure 15.
Pseudocode for the observation sequence function.
Figure 15.
Pseudocode for the observation sequence function.
Figure 16.
Pseudocode for the bioacoustic interaction function, producing the sound interaction after VHF signal detection.
Figure 16.
Pseudocode for the bioacoustic interaction function, producing the sound interaction after VHF signal detection.
5.6. Results
In February 2007, a two-week evaluation was conducted in the northern part of Iriomote Island (24°20'N, 123°55'E). During the evaluation period, the system was set up in the northern part of the island with all functions fully operational. The evaluation began at 16:30 on 16 February 2007. A VHF signal receiver was set to monitor signals from an Iriomote cat fitted with a radio transmitter collar. The pre-recorded call of a white-breasted waterhen (Amaurornis phoenicurus) was used for the interaction lure to obtain feedback from the target. At 18:36:11, the IR sensor detected a heat source. The DCPS then generated and sent a notification email to the observer, which was received at 18:36:40, 30 s after heat source detection; however, it is possible that the infrared image digitizing system was still in the process of booting at that time as no image was captured for this event.
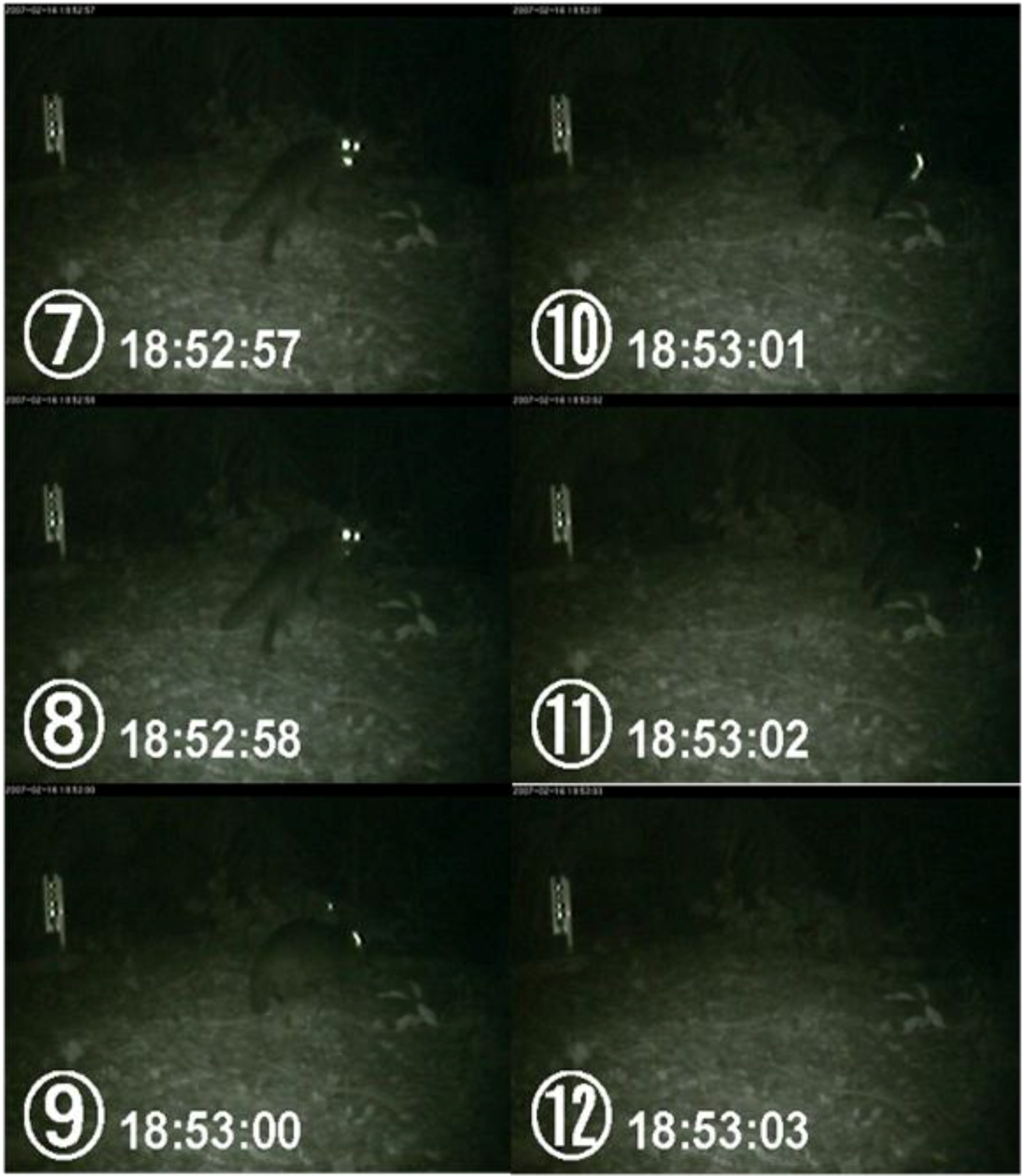
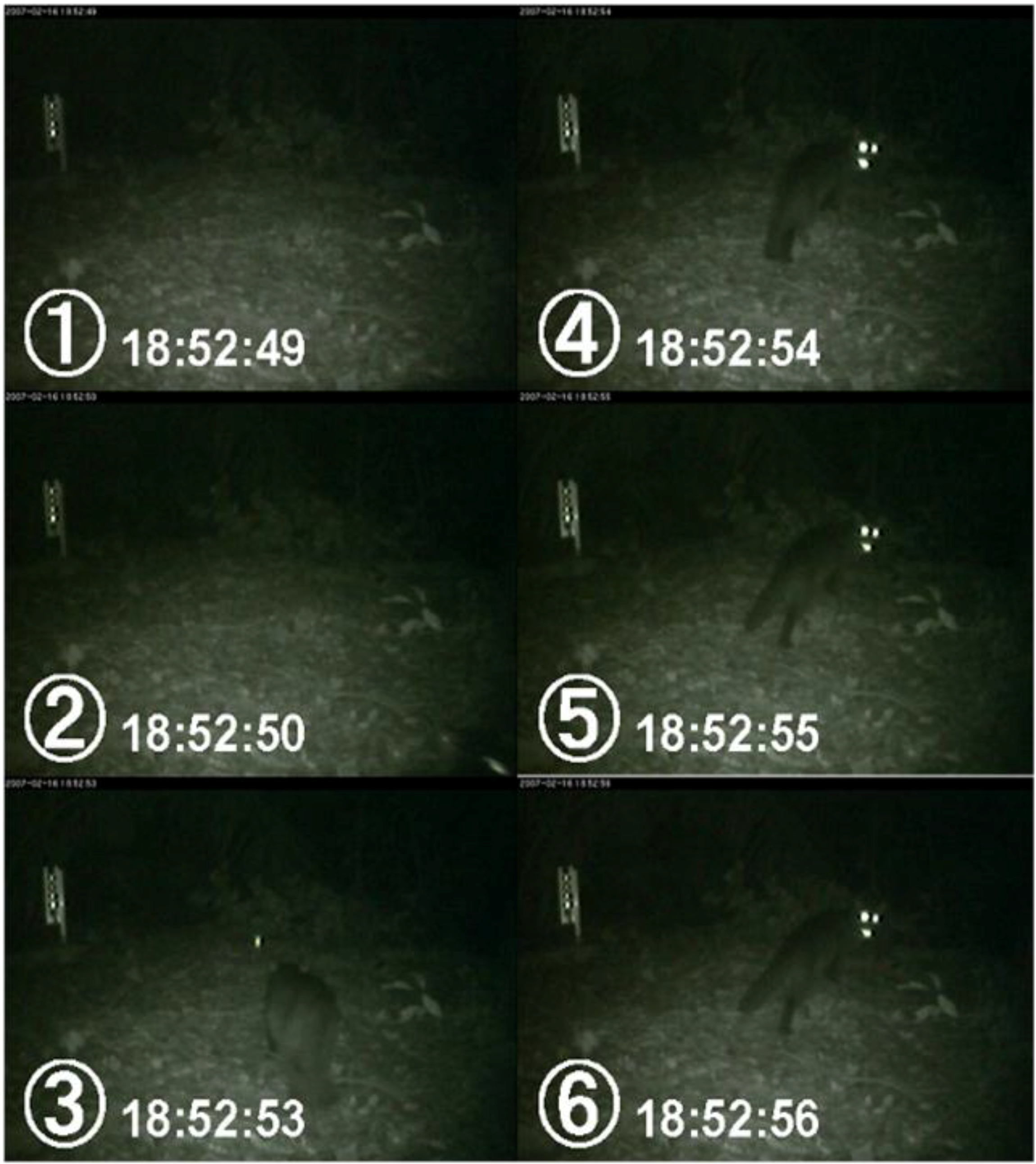
At 18:52:49, the system simultaneously detected the VHF signal and body heat. An infrared image was successfully captured and is shown as image ➀ one of
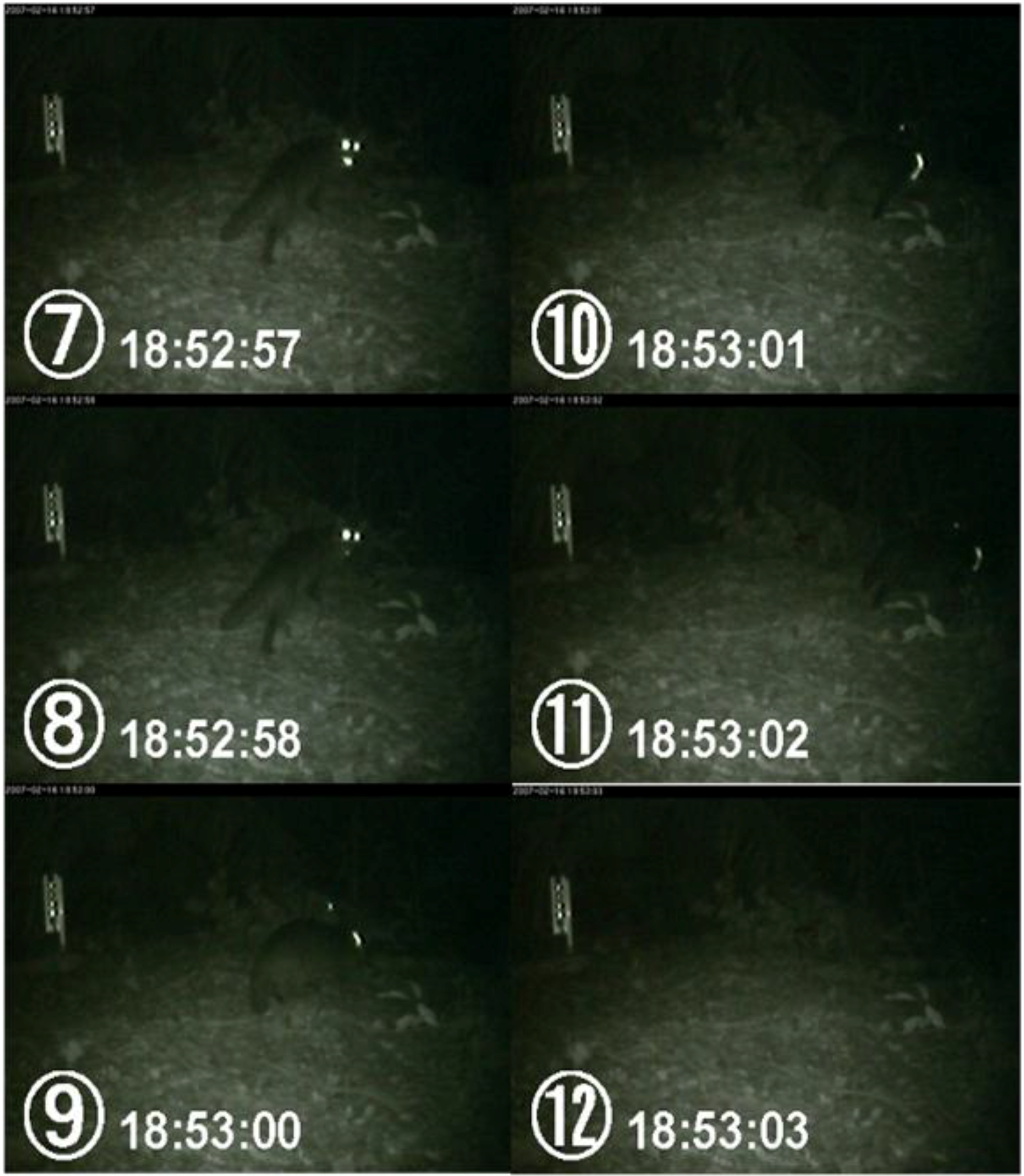
Figure 17. At 18:52:50, the speaker started to play the prerecorded sound when the target appeared at the bottom right of image ➁. At 18:52:54, as shown in image ➃, the target reacted to the sound, which was the call of the white-breasted waterhen, by looking back toward the system. The target kept looking at the system until 18:52:58, as seen in image ➇ of
Figure 18.
Figure 17.
Infrared pictures taken by our system.
Figure 17.
Infrared pictures taken by our system.
Figure 18.
Infrared pictures taken by our system.
Figure 18.
Infrared pictures taken by our system.
6. Discussion
In this section, we discuss how HCBI can facilitate ecological two-way interactions by examining current environmental preservation activities and reviewing work related to our proposed method.
As shown in
Figure 1 and described above, the Iriomote cat (
Felis iriomotensis) is a wild cat approximately the size of a domestic cat that only lives on Iriomote Island. One of the most significant threats to the declining cat population is roadkill deaths [
6]. Ironically, the reason behind the rapid increase in registered vehicles and related cat deaths is improvements to the local economy thanks to tourism. More specifically, as the fame of the Iriomote cat spread, it added significant value to the island’s tourism industry and numerous tourists now visit the island in hopes of seeing the endangered cat before it becomes extinct. As the number of tourists has increased, so has the number of rental cars, which, in turn, has increased the number of roadkills.
Aside from a decreasing Iriomote cat population, the net effects of these phenomena include increased conflict among local people, administrative officers, and academic researchers. This has been exacerbated as news media outlets have reported cat deaths by roadkill, which then further increased the popularity of the cat, thus resulting in even more tourists and thus hastening the animal’s decline toward extinction. As noted above, our thesis is that if information technology could provide us with simulated experiences of being close to nature while promoting the necessity of nature conservation, the number of roadkills of endangered species in world heritage areas by eco-tourists might decrease; however, even though conservation scientists have actively advocated environmental protection by disseminating information on contemporary critical situations through the use of state-of-the-art information technologies, and by reaching out to people through imagery displaying endangered species dying in roadkills (
Figure 2); however, such techniques can never be more than a simple HCI, and thus they will be ineffective in preventing further deaths and perhaps extinction.
There are many historical and current examples of people peacefully coexisting with nature [
25]; however, such examples are not easily applicable to the case of the Iriomote cat. Owing to the dependence of the local economy on tourism, including taxation for the conservation budget, the number of tourists has never been restricted. Therefore, the administrative officers and conservation specialists have vehemently asked drivers to drive below posted speed limits to avoid killing Iriomote cats; unfortunately, the situation has not improved.
Nonetheless, there are many information technologies available in urban areas today that could help. Smartphones [
26] are technically capable of detecting and reporting, in real time, the arrival of wildlife on or near roads. While this may help avoid roadkill accidents, this information also may help illegal hunters capture Iriomote cats. Indeed, there have been uncomfirmed rumors that illegally captured Iriomote cats were for sale in Tokyo at one time.While lighting the road at night may also be helpful, it would possibly further help illegal hunting. Consequently, this example of direct use of information technology is not applicable to the Iriomote cat case for conservation reasons. We therefore feel it is best to ask drivers to drive under the speed limit but not provide them current positioning information of any Iriomote cats.
Wildlife crossings such as “wildlife underpasses” are widely used to avoid accidents on the road. Such underpasses are constructed to allow wildlife to cross under such artificial constructions as roads, which cut across their habitat. When biologists discover a new trail of the Iromote cat, an underpass is requested; however, the underpass must be monitored for at least three years after construction in order to monitor its use, because it may take over 2 years for wildlife to adapt, especially if they use the area only for seasonal migration. HCBI might help impact this migration at an early stage of migration by attracting animals to specific locations; however, it is evident that the impact of virtual bio-acoustics on natural environments is not negligible [
27]. More specifically, over time, the Iriomote cat will learn that when a call from a prey species comes from that location, there is never a prey species there and therefore ignore the call, a process called habituation. A large set of different prey species calls, each produced randomly, might overcome this problem, at least until the Iriomote cat realized that calls from that location never led to finding prey, which might take a long time or never occur, depending on the frequency of visits. These techniques are often used to control harmful bird and mammal populations and protect farmland from such creatures. Further studies need to investigate how to overcome the learning problem.
HCBI provides an alternate approach for achieving a sustainable society between humans and the biosphere through information technologies. By physically separating our human society from the habitat of the Iriomote cat, we can substantially decrease the number of cars on the road, thus reducing or eliminating roadkill accidents altogether. This is certainly the most effective method for preventing further roadkill; however, the local economy historically has depended on the island’s tourism industry and the fame of the Iriomote cat. The reduction or removal of the human society from the habitat would have a devastating effect on the current tourism industry, requiring an alternative activity to sustain and advance the local economy. To this end, information technology takes responsibility for sustaining and advancing the local economy. In other words, if information technology could be used to provide eco-tourists with the simulated experience of being close to nature, the number of roadkills of the Iriomote cat would decrease without promoting the necessity of nature conservation.
It is evident that the impact of HCBI on natural environments is not negligible. While there is no right or wrong answer, moderation is key, just as it is key to a sustainable society. Any activity, if conducted too often, can be destructive. One example of a behavior that is only eco-friendly in moderation is co-tourism, which is defined as “responsible travel to natural areas that conserves the environment and improves the well-being of local people” [
28]; however, it is estimated that more than 3000 eco-tourists visit Iriomote Island every day. Such visitors come from urban areas to experience the island’s magnificent ecosystem. Three thousand people walk in the jungles and trample on innumerable plants every day. Further, rental cars driven by tourists accidentally kill endangered species in areas that have been set aside for their protection. No matter how calmly and non-intrusively tourists attempt to behave, their presence inevitably disturbs wildlife and nature conservation efforts.
In contrast to the current situation, we have been operating a networked bio-acoustic streaming and recording system since 1997 as a basis for this study [
6]. To maintain the remote system, we enter the tropical forest to replace system components only once a year, thus allowing users to listen to live sounds of the ecosystem over the Internet without physically going to the island. The environmental destruction caused by one person in one day once a year is orders of magnitude less than that caused by 6000 people every day for 365 days a year. Thus, we suggest that people who visit the island for eco-tourism become “ego-eco-tourists”, even though that is not their intention. Applying electronic technology in natural areas to serve as a rather conventional wildlife monitoring system that uses widely accepted hardware is moderately eco-friendly. Although it is not the ideal solution, it is better than the alternative.
In this study, we also focus on ecological neutrality. HCBI is essentially virtual reality, meaning that if power to remote devices is turned off, all interactions terminate. As an example in which this is applicable, consider Amami Island, Japan. In 1979, 30 individuals of the small Indian mongoose (
Herpestes javanicus) were released on Amami Island to control the venomous habu snake (
Trimeresurus flavoviridis) and black rat (
Rattus rattus) populations; however, instead of controlling snakes, the mongoose has since had major negative effects on agriculture and the native animals in mountainous areas. A total of 3886 mongooses were trapped by pest control measures of the local government and an eradication project of the Environment Agency in the first year of the project, fiscal year 2000 [
29]. The mongoose population and annual growth rate were estimated to be 10,000 individuals and 30%, respectively, before the eradication project. What if HCBI was able to control the behavior of the snake and rat populations? We could control the effect until any negative impact on native animals is detected. Further, the operational costs of implementing such an HCBI solution are much smaller than that of the eradication project in Amami Island (our estimates here exclude the raw materials and energy costs for making such technologies). Thus, in this study, our aim is not to replace current practical and realistic conservation technologies on the conservation field, but rather provide other solutions in the future. Again, the impact of virtual bio-acoustics on natural environments is not negligible, as it is merely a virtual presence, which would never exceed the real presence of humans.
Information connectivity with a remote ecosystem under physically disconnected conditions enables us to control the degree of impact HCBI has on an environment. By simply turning off the power source of the computer system, we can prevent further virtual impact on the remote ecosystem. This is the concept of ecological neutrality, which would certainly minimize any side-effects if incorrect or inefficient solutions are applied. To this end, HCBI achieves the following:
Physical separation: information technology enables remote communication;
Information connectivity: the use of non-verbal interfaces with food chain information allows two-way information flow between humans and remote biospheres;
Ecological neutrality: HCBI is virtual reality, so by simply turning off power to the remote devices, all interactions are terminated.
In our HCBI vision, computer systems are able to mimic species in a food chain system and stimulate behaviors within ecosystems. These capabilities not only give researchers opportunities to interact with members of the ecosystem, but also enable them to control the degree of the interactions when necessary.
7. Conclusions
In this study, we presented a vision of a human–computer–biosphere interaction (HCBI) that facilitates nonhuman-centric interactions in order to move societies toward environmental sustainability. HCBI extends the concept of HCI from countable people, objects, pets, and plants to an auditory biosphere that is uncountable, complex, and non-linguistic. In this paper, we described the development and integration of nonhuman-centric design protocols, requirements, methods, and context evaluation.
We developed a networked remote-sensing Linux-based embedded system for evaluating bio-acoustic interactions between wildlife and humans in a remote location. The monitoring system was capable of generating virtual bio-acoustic interactions between the system and target animal species using a tracking collar, microphone, speaker, infrared camera, infrared heat sensor, microclimate sensor, radio-tracking, GPS, radio clock, high capacity battery, and high-speed wireless communication device. The system captured and stored environmental data from the wildlife habitat and transferred the data via a high-speed wireless connection to an observer.
Virtual bio-acoustic interaction is a two-way interactive process used to influence the behavior of wildlife. In this study, pre-recorded calls of a prey animal were played to establish desired responses in target species. To ensure such interactions took place, the choice of pre-recorded calls required careful consideration of the prey species or interspecific social interactions of the target wildlife species in its natural habitat. An incorrect choice would result in no feedback from the target wildlife species. Our experimentation successfully demonstrated bio-acoustic interaction between the endangered Iriomote cat and humans via a computer system, thus validating the HCBI concept. We believe that the full-scale implementation of such a system could make a significant contribution to nature conservation. Development of the system involved the combination of a variety of technologies and opens up a range of possible applications for engineers and researchers around the world.
Acknowledgments
We sincerely thank Nishimura, Kawasaki, Nishimura, Murata, Fujita, Takaya, Kihara, Kawasaki, Migita, Tanaka, Takemura, Okada, Murata, Okamura, Matsumoto, Matsumoto, Watanabe, Yamane, and Izawa for the time they spent on Iriomote Island.
This research was supported by SoundExplorer participants, SoundBum participants, NTT-WEST Inc. Okinawa branch, IMS.JP Co. Ltd., International Academic Research Grant Program of the University of Tokyo, University of Ryukyus, Japan Forestry Agency, Conservation Breeding Specialist Group, Amazon Future Association, NTT-DoCoMo Inc., Tamagawa Seiki Co. Ltd., and Mikasa Engineering Ltd.
Author Contributions
Study conception and design: Kobayashi and Matsushima; Acquisition of data: Kobayashi; Analysis and interpretation of data: Kobayashi and Matsushima; Drafting of manuscript: Kobayashi; Critical revision: Kobayashi.
Conflicts of Interest
The authors have no conflict of interest directly relevant to the content of this article.
References
- McNicol, T. Rare Japanese Wildcat Edging Closer to Extinction; National Geographic News: Tokyo, Japan, 2007. [Google Scholar]
- Suzuki, D.T. Zen and Japanese Culture, 2nd ed.; Pantheon Books: New York, NY, USA, 1959; Volume xxiii, p. 478. [Google Scholar]
- Williams, K.; Harvey, D. Transcendent experience in forest environments. J. Environ. Psychol. 2001, 21, 249–260. [Google Scholar]
- Yoshinori, I. A new genus and species of cat from Iriomote, Ryukyu Island. J. Mammal Soc. Jpn. 1967, 3, 74–105. [Google Scholar]
- International Union for Conservation of Nature and Natural Resources. Prionailurus bengalensis ssp. iriomotensis. Available online: http://www.iucnredlist.org/details/18151/0 (accessed on 25 September 2014).
- Kobayashi, H.; Ueoka, R.; Hirose, M. Human Computer Biosphere Interaction: Towards a Sustainable Society. In CHI ’09 Extended Abstracts on Human Factors in Computing Systems; Association for Computing Machinery (ACM): Boston, MA, USA, 2009; pp. 2509–2518. [Google Scholar]
- Okinawa Prefectural Government. Number of Retained Motor Vehicles. Available online: http://www.pref.okinawa.jp/toukeika/index.html (accessed on 25 September 2014).
- McNicol, T. Rare Japanese Wildcat Edging Closer to Extinction. Available online: http://news.nationalgeographic.com/news/2007/08/070829-rarest-cat.html (accessed on 25 September 2014).
- Kobayashi, H. Research in human–computer–biosphere interaction. Leonardo 2014. accepted for publication. [Google Scholar]
- Hewett, B. Card, Carey, Gasen, Mantei, Perlman, Strong and Verplank Definition of Human Computer Interaction. Available online: http://old.sigchi.org/cdg/cdg2.html (accessed on 25 September 2014).
- Kobayashi, H.; Ueoka, R.; Hirose, M. Wearable forest clothing system: Beyond human–computer interaction. Leonardo 2009, 42, 300–306. [Google Scholar]
- Itoh, Y.; Miyajima, A.; Watanabe, T. ‘TSUNAGARI’ Communication: Fostering a Feeling of Connection between Family Members. In CHI ’02 Extended Abstracts on Human Factors in Computing Systems; Association for Computing Machinery: Minneapolis, MN, USA, 2002; pp. 810–811. [Google Scholar]
- Lee, P.; Cheok, D.; James, S.; Debra, L.; Jie, W.; Chuang, W.; Farbiz, F. A mobile pet wearable computer and mixed reality system for human poultry interaction through the internet. Person. Ubiquitous Comput. 2006, 10, 301–317. [Google Scholar] [CrossRef]
- Bray, R.; Faludi, R.; Hartman, K.; London, K. Botanicalls. Available online: http://www.botanicalls.com/ (accessed on 25 September 2014).
- Kobayashi, H.; Nishimura, Y.; Kawasaki, Y. Live sound from Iriomote Island. Available online: http://www.soundbum.org (accessed on 1 April 2010).
- Begon, M.; Harper, J.L.; Townsend, C.R. Ecology: Individuals, Populations, and Communities, 3rd ed.; Blackwell Science: Oxford, UK & Cambridge, MA, USA, 1996; Volume xii, p. 1068. [Google Scholar]
- Ricklefs, R.E.; Schluter, D. Species Diversity in Ecological Communities: Historical and Geographical Perspectives; University of Chicago Press: Chicago, IL, USA, 1993; p. 414. [Google Scholar]
- Krause, B.L. Bioacoustics, habitat ambience in ecological balance. Whole Earth Rev. 1987, 57, 14–18. [Google Scholar]
- Searcy, W.A.; Nowicki, S. The Evolution of Animal Communication: Reliability and Deception in Signaling Systems; Princeton University Press: Princeton, NJ, USA, 2005; Volume xii, p. 270. [Google Scholar]
- Muuss, M. The Story of the PING Program. Available online: http://ftp.arl.mil/~mike/ping.html (accessed on 25 September 2014).
- Marc, A.; Andrew, J.H.; Joanna, R.; Rahel, S.; Andreas, W. Handbook for Wildlife Monitoring Using Camera-Traps; BBEC II Secretariat: Sabah, Malaysia, 2012. [Google Scholar]
- Agency, J.M. Japan Meteorological Agency. Available online: http://www.jma.go.jp (accessed on 25 September 2014).
- Tashiro, Y.; Yashima, Y.; Fuju, H. NTT’s technologies for next-generation video services. Comput. Entertain. 2006, 4. Article 9. [Google Scholar]
- Wells, N. BusyBox: A Swiss army knife for Linux. Linux J. 2000, 79. Article 10. [Google Scholar]
- Millennium Ecosystem Assessment (Program). Ecosystems and Human Well-Being: Synthesis; Island Press: Washington, DC, USA, 2005; Volume x, p. 137. [Google Scholar]
- Olson, D.D.; Bissonette, J.A.; Cramer, P.C.; Green, A.D.; Davis, S.T.; Jackson, P.J.; Coster, D.C. Monitoring wildlife-vehicle collisions in the information age: How smartphones can improve data collection. PLoS One 2014, 9, e98613. [Google Scholar]
- Cramer, P.C.; Bissonette, J.A. Wildlife Crossings in North America: The State of the Science and Practice. In Proceedings of the 2005 International Conference on Ecology and Transportation, San Diego, CA, USA, 28 August–2 September 2005.
- The International Ecotourism Society. Ecotourism Definition. Available online: https://www.ecotourism.org/book/ecotourism-definition (accessed on 25 September 2014).
- Watari, Y.; Nishijima, S.; Fukasawa, M.; Yamada, F.; Abe, S.; Miyashita, T. Evaluating the “recovery level” of endangered species without prior information before alien invasion. Ecol. Evol. 2013, 3, 4711–4721. [Google Scholar] [PubMed]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}