
Identifying Damage in Structures: Definition of Thresholds to Minimize False Alarms in SHM Systems



Abstract
1. Introduction
2. Analysis of the Problem
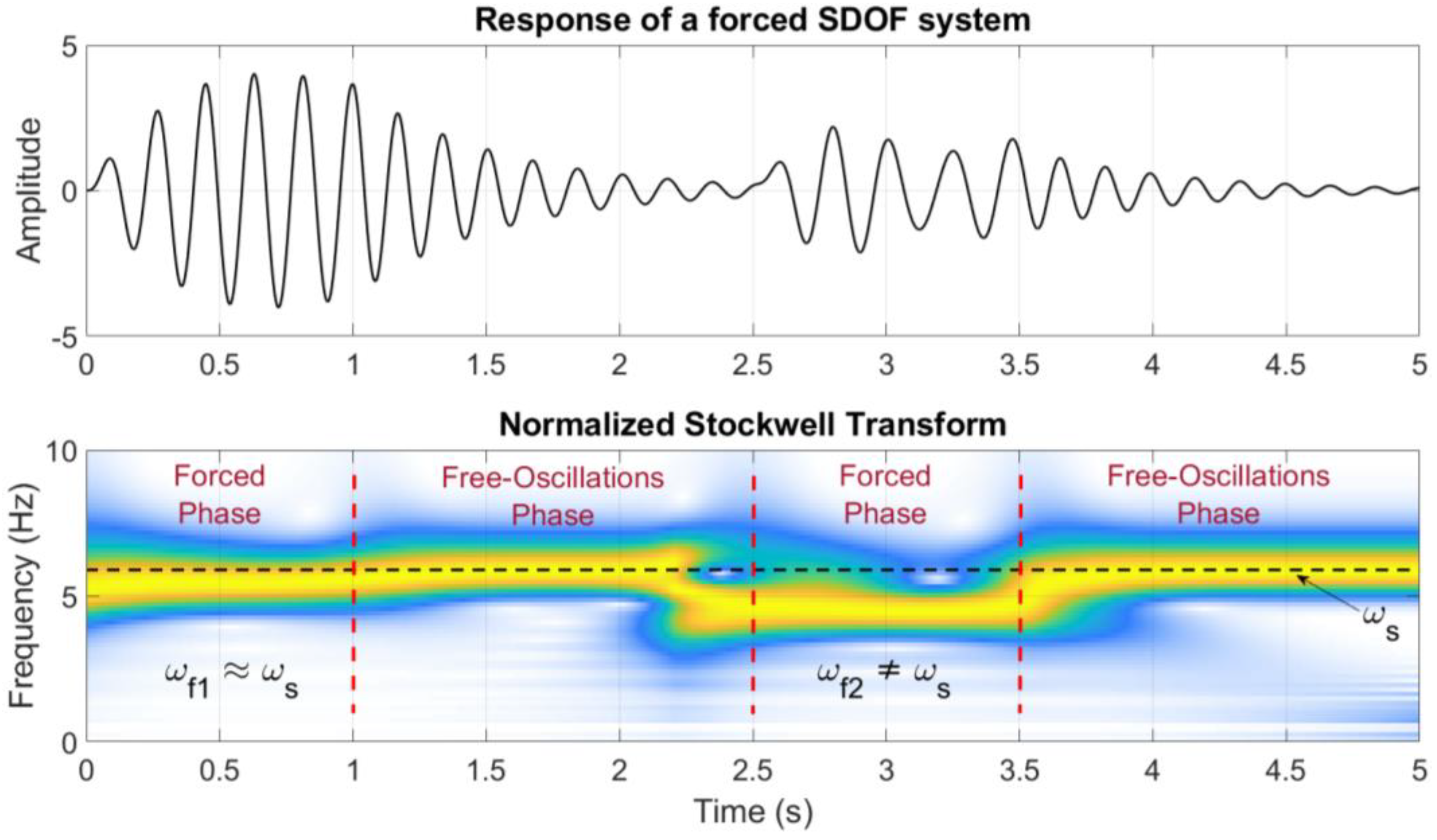
- Transient Response, corresponding to the solution of the associated homogenous solution, dependent on system characteristics and initial conditions (velocity and displacement).
- Steady-state Response, or regime, corresponding to the particular solution of the complete equation and dependant on the external force for which the maximum amplitude depends on the equivalent viscous damping factor and from the ratio between the frequency of the force and the natural frequency of the system .
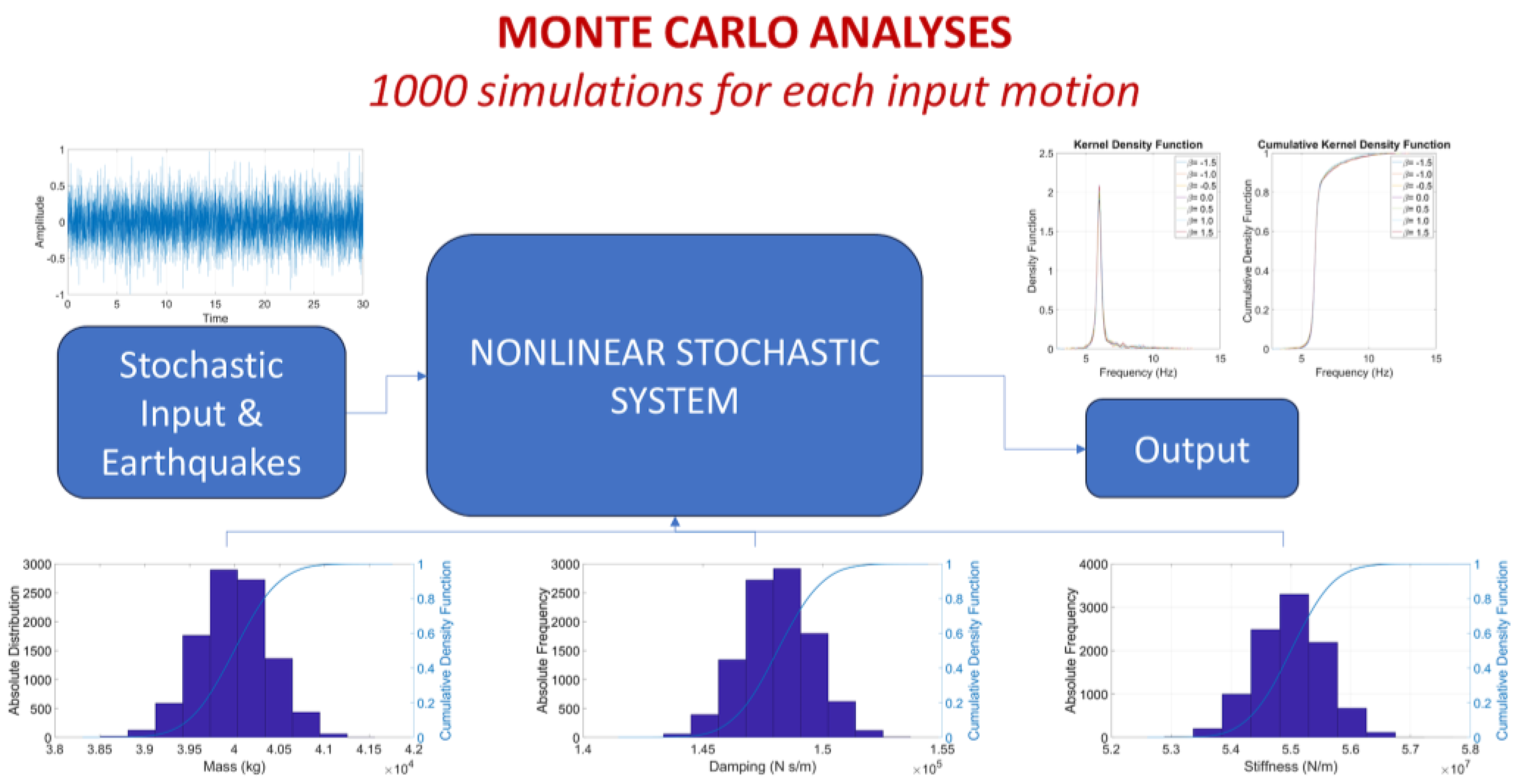
3. Numerical Model and Input Motion
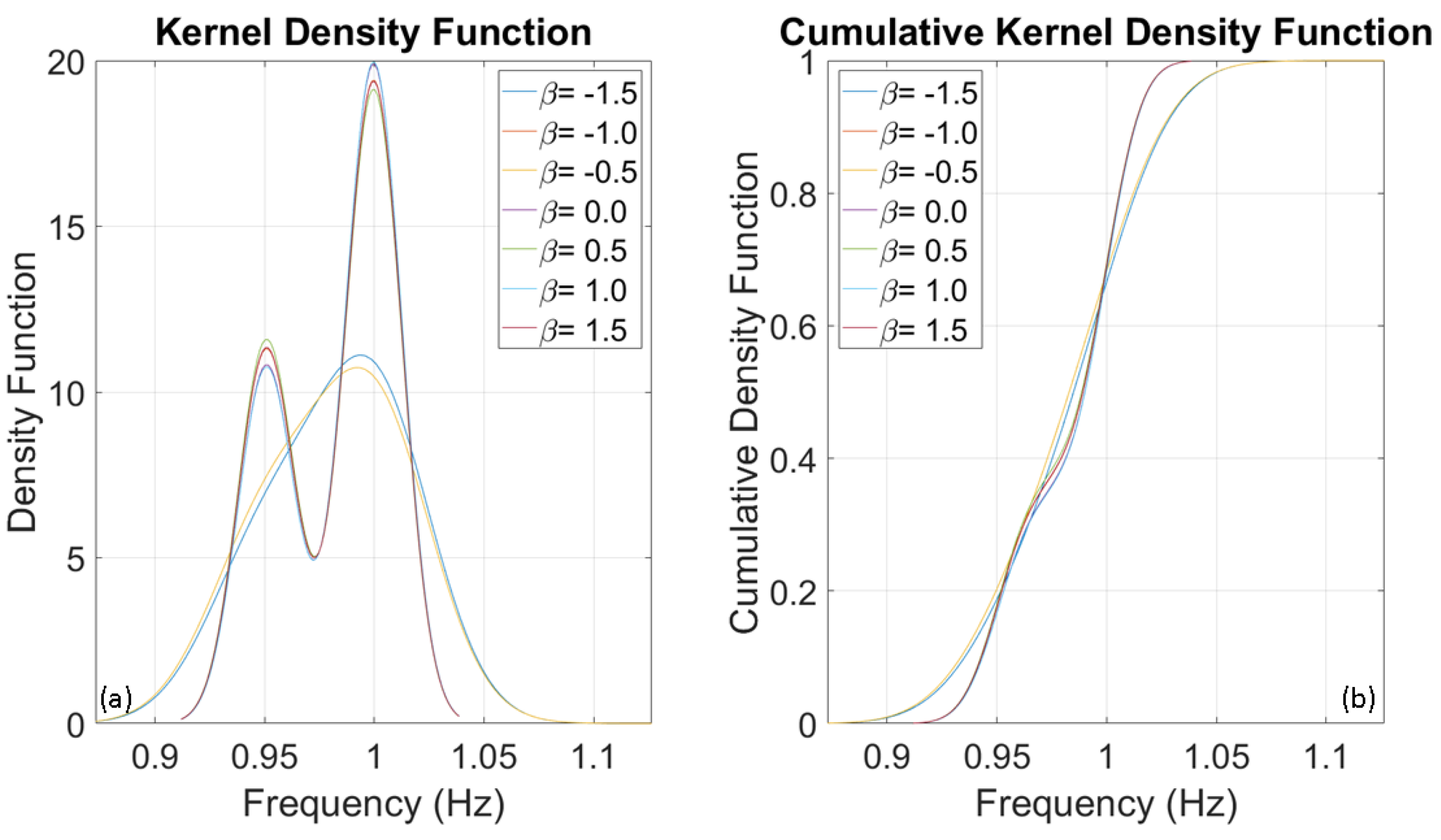
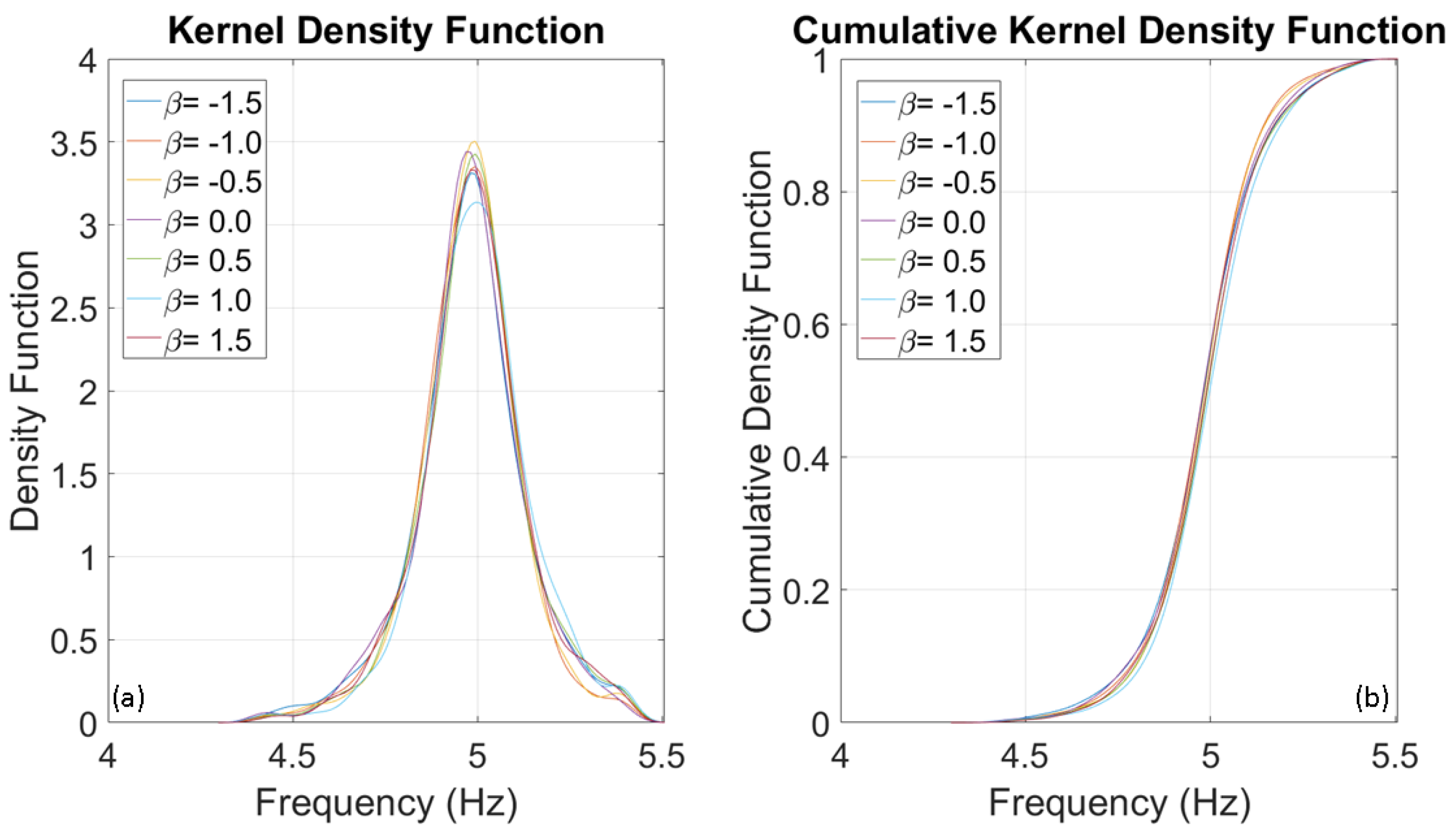
4. Results of Monte Carlo Simulations
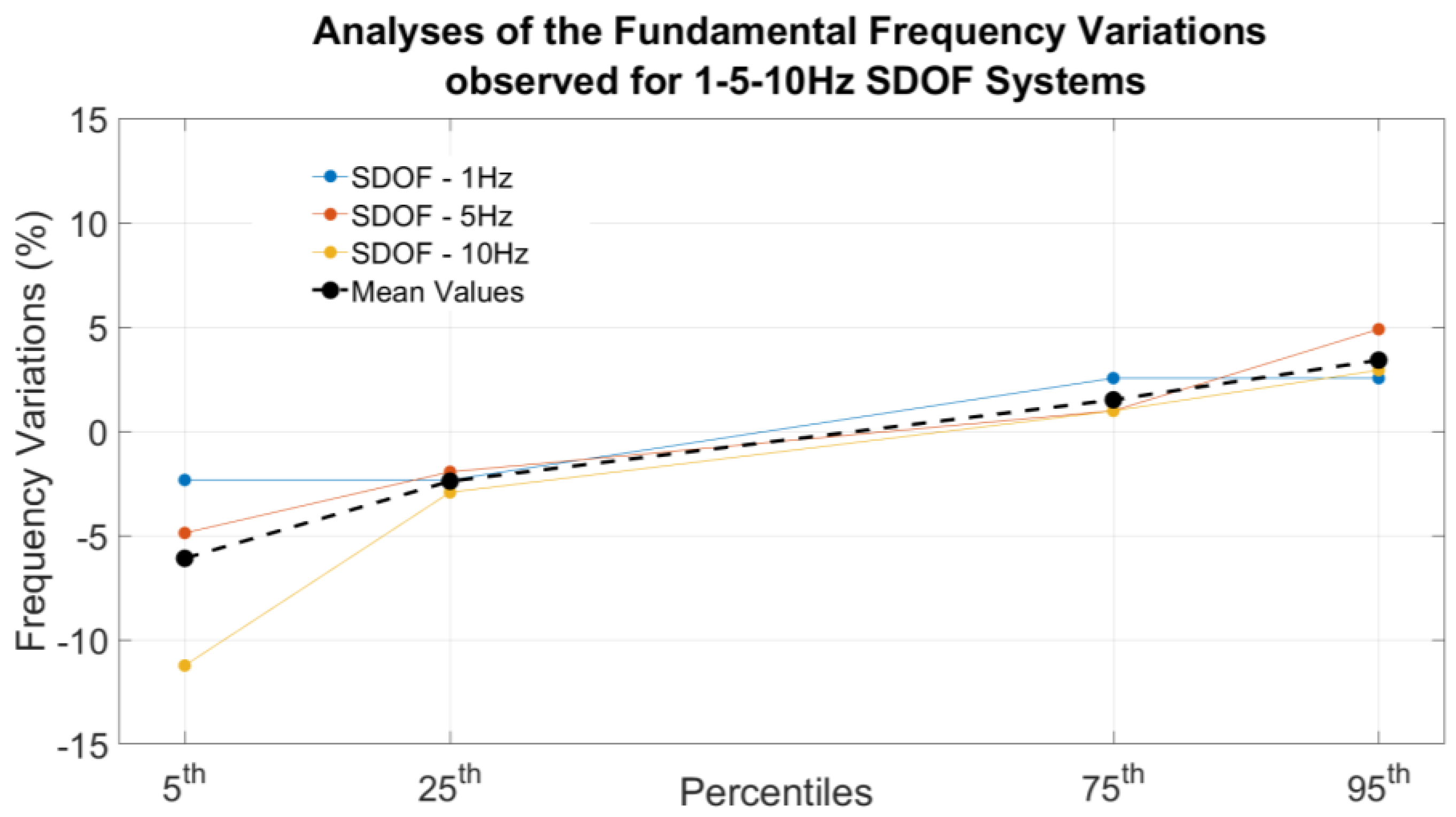
Analyses of Monte Carlo Simulations Carried Out Using Real Earthquakes
5. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Correction Statement
Nomenclature
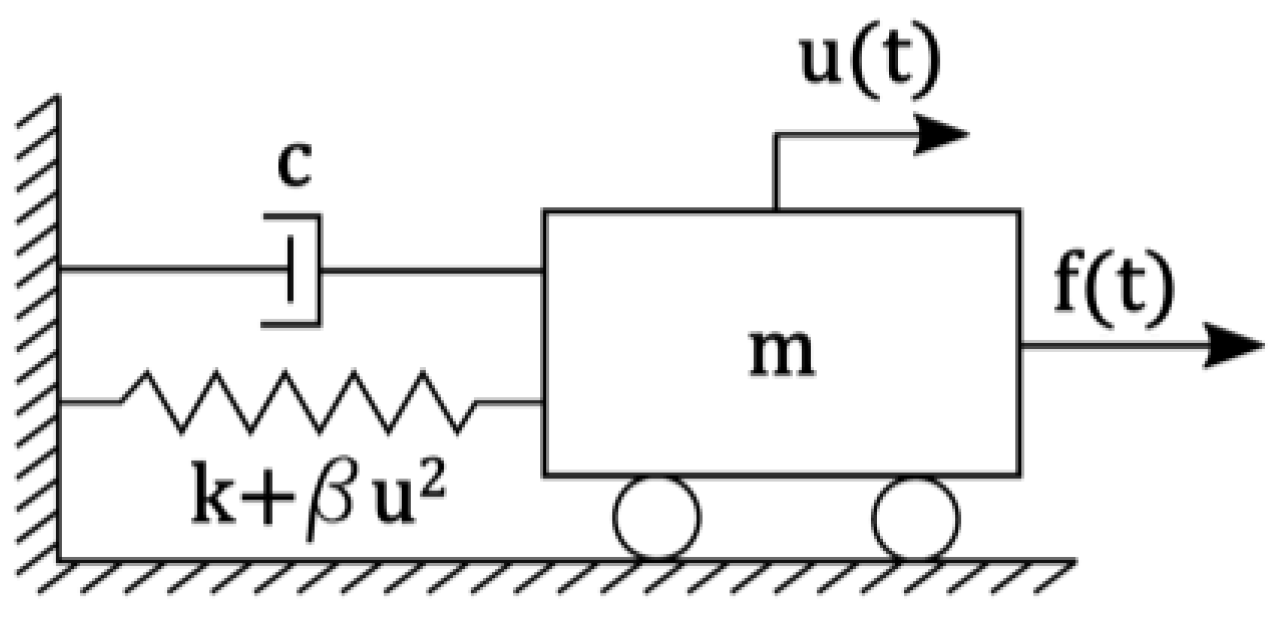
| m | mass of the SDOF system |
| c | damping of the SDOF system |
| k | stiffness of the SDOF system |
| natural circular frequency of the SDOF system | |
| ξ | equivalent viscous damping factor of the SDOF system |
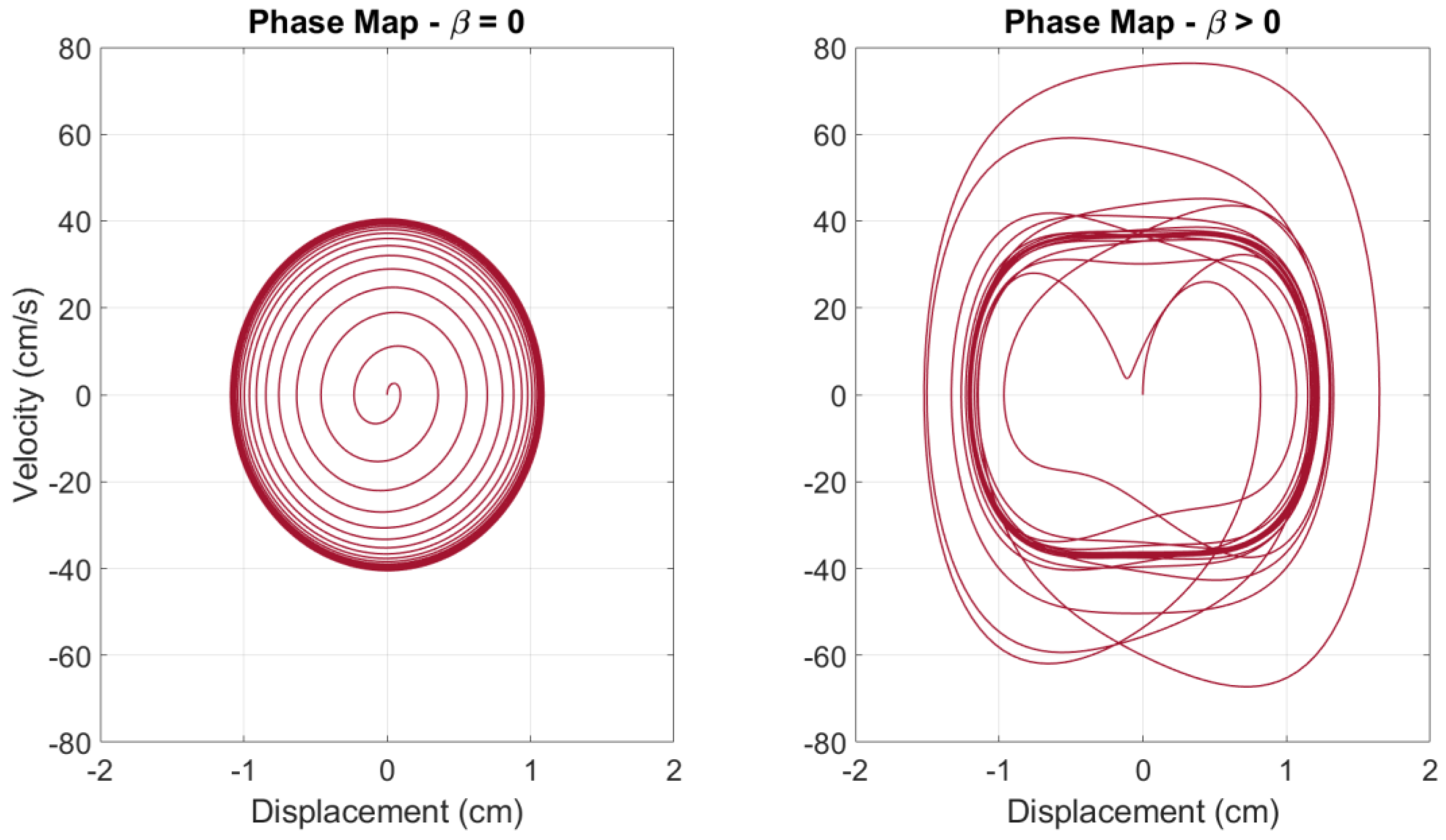
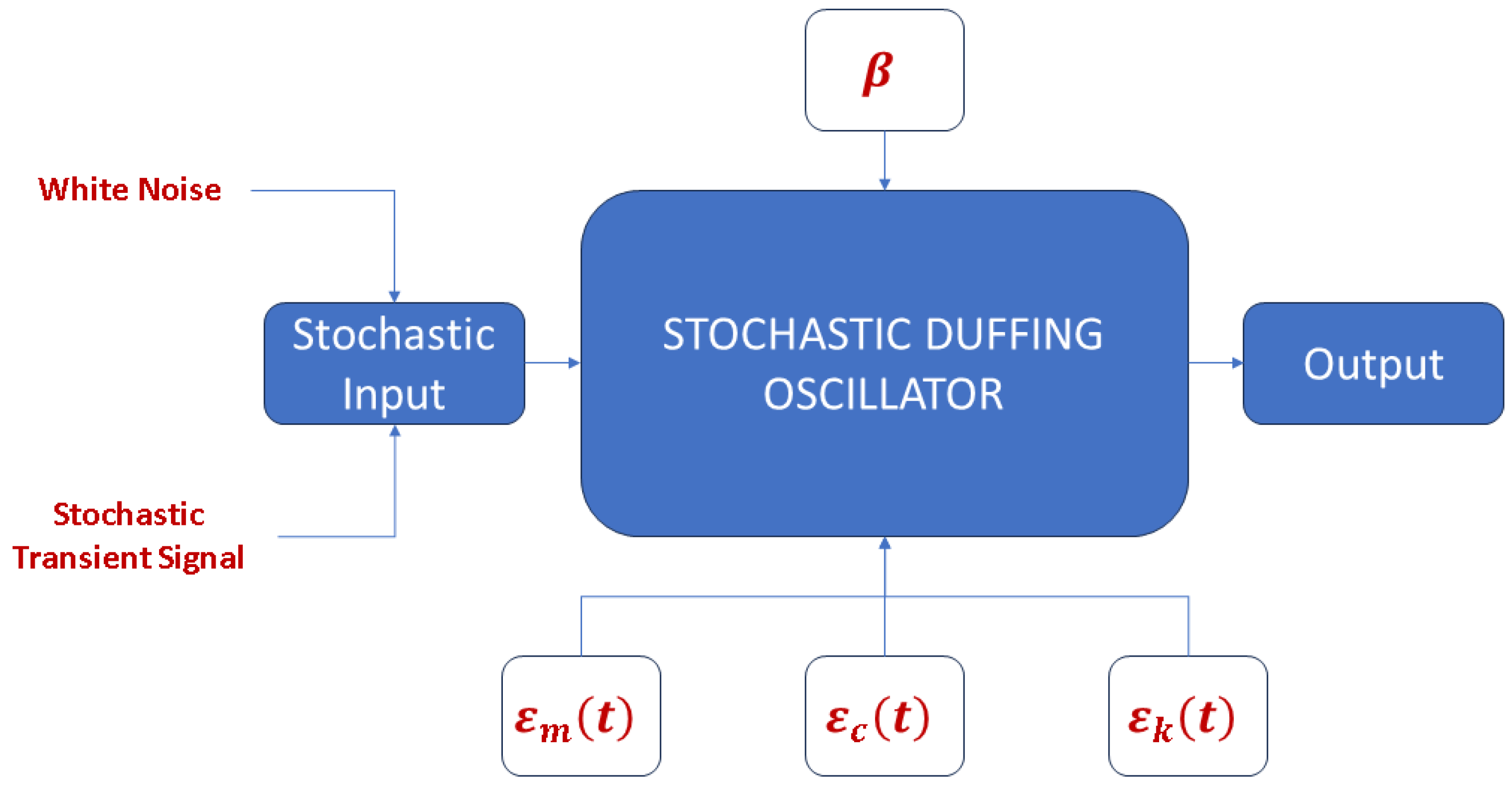
| β | Duffing coefficient |
| random small disturbance of mass | |
| random small disturbance of damping | |
| random small disturbance of stiffness | |
| displacement | |
| velocity | |
| acceleration | |
| external excitation | |
| Non-stationary linear variations threshold |
References
- Sun, X.; Ilanko, S.; Mochida, Y.; Tighe, R.C. A Review on Vibration-Based Damage Detection Methods for Civil Structures. Vibration 2023, 6, 843–875. [Google Scholar] [CrossRef]
- Hellier, C. Handbook of Nondestructive Evaluation, 2nd ed.; McGraw Hill Professional: New York, NY, USA, 2013. [Google Scholar]
- Avci, O.; Abdeljaber, O.; Kiranyaz, S.; Hussein, M.; Gabbouj, M.; Inman, D.J. A review of vibration-based damage detection in civil structures: From traditional methods to Machine Learning and Deep Learning applications. Mech. Syst. Signal Proc. 2021, 147, 107077. [Google Scholar] [CrossRef]
- Wang, Z.; Ong, K. Autoregressive coefficients based Hotelling’s T2 control chart for structural health monitoring. Comput. Struct. 2008, 86, 1918–1935. [Google Scholar] [CrossRef]
- Teughels, A.; Maeck, J.; De Roeck, G. Damage assessment by FE model updating using damage functions. Comput. Struct. 2002, 80, 1869–1879. [Google Scholar] [CrossRef]
- Rytter, A. Vibrational Based Inspection of Civil Engineering Structures. Ph.D. Thesis, Department of Building Technology and Structural Engineering, Aalborg University, Aalborg, Denmark, 1993. [Google Scholar]
- Caddemi, S.; Calio, I.; Cannizzaro, F.; Morassi, A. A procedure for the identification of multiple cracks on beams and frames by static measurements. Struct. Control Health Monit. 2018, 25, e2194. [Google Scholar] [CrossRef]
- Buda, G.; Caddemi, S. Identification of concentrated damages in Euler-Bernoulli beams under static loads. J. Eng. Mech. 2007, 133, 942–956. [Google Scholar] [CrossRef]
- Doebling, S.W.; Farrar, C.R.; Prime, M.B. A summary review of vibration-based damage identification methods. Shock. Vib. Dig. 1998, 30, 91–105. [Google Scholar] [CrossRef]
- Sekhar, A.S. Multiple cracks effects and identification. Mech. Syst. Signal Proc. 2008, 22, 845–878. [Google Scholar] [CrossRef]
- Limongelli, M.P.; Siegert, D.; Merliot, E.; Waeytens, J.; Bourquin, F.; Vidal, R.; Le Corvec, V.; Gueguen, I.; Cottineau, L.M. Damage detection in a post tensioned concrete beam—Experimental investigation. Eng. Struct. 2016, 128, 15–25. [Google Scholar] [CrossRef]
- Bonopera, M. Stress Evaluation in Axially Loaded Members of Masonry Buildings and Space Structures: From Traditional Methods to Combinations with Artificial Intelligence Approaches. Buildings 2023, 13, 2097. [Google Scholar] [CrossRef]
- Fan, W.; Qiao, P. Vibration-based damage identification methods: A review and comparative study. Struct. Health Monit. 2011, 10, 83–111. [Google Scholar] [CrossRef]
- Katunin, A. Nondestructive damage assessment of composite structures based on wavelet analysis of modal curvatures: State-of-the-art review and description of wavelet-based damage assessment benchmark. Shock Vib. 2015, 2015, 735219. [Google Scholar] [CrossRef]
- Ditommaso, R.; Mucciarelli, M.; Ponzo, F.C. Analysis of non-stationary structural systems by using a band-variable filter. Bull. Earthq. Eng. 2012, 10, 895–911. [Google Scholar] [CrossRef]
- Stockwell, R.G.; Mansinha, L.; Lowe, R.P. Localization of the complex spectrum: The S-transform. IEEE Trans. Signal Process 1996, 44, 998–1001. [Google Scholar] [CrossRef]
- Ditommaso, R.; Ponzo, F.C. Automatic evaluation of the fundamental frequency variations and related damping factor of reinforced concrete framed structures using the Short Time Impulse Response Function (STIRF). Eng. Struct. 2015, 82, 104–112. [Google Scholar] [CrossRef]
- Ditommaso, R.; Ponzo, F.C.; Auletta, G. Damage detection on framed structures: Modal curvature evaluation using Stockwell Transform under seismic excitation. Earthq. Eng. Eng. Vib. 2015, 14, 265–274. [Google Scholar] [CrossRef]
- Iacovino, C.; Ditommaso, R.; Ponzo, F.; Limongelli, M. The Interpolation Evolution Method for damage localization in structures under seismic excitation. Earthq. Eng. Struct. Dyn. 2018, 47, 2117–2136. [Google Scholar] [CrossRef]
- Ditommaso, R.; Iacovino, C.; Auletta, G.; Parolai, S.; Ponzo, F.C. Damage detection and localization on real structures subjected to strong motion earthquakes using the curvature evolution method: The Navelli (Italy) case Study. Appl. Sci. 2021, 11, 6496. [Google Scholar] [CrossRef]
- Cataldo, A.; Roselli, I.; Fioriti, V.; Saitta, F.; Colucci, A.; Tatì, A.; Ponzo, F.C.; Ditommaso, R.; Mennuti, C.; Marzani, A. Advanced Video-Based Processing for Low-Cost Damage Assessment of Buildings under Seismic Loading in Shaking Table Tests. Sensors 2023, 23, 5303. [Google Scholar] [CrossRef]
- Bovsunovsky, A.; Surace, C. Non-linearities in the vibrations of elastic structures with a closing crack: A state of the art review. Mech. Syst. Signal Proc. 2015, 62–63, 129–148. [Google Scholar] [CrossRef]
- Giannini, O.; Casini, P.; Vestroni, F. Nonlinear harmonic identification of breathing cracks in beams. Comput. Struct. 2013, 129, 166–177. [Google Scholar] [CrossRef]
- Caddemi, S.; Caliò, I.; Marletta, M. The dynamic non-linear behaviour of beams with closing cracks. In Proceedings of the AIMETA 2009 XIX Congresso di Meccanica Teorica ed Applicata, Ancona, Italy, 14–17 September 2009. [Google Scholar]
- Kisa, M.; Brandon, J. The effects of closure of cracks on the dynamics of a cracked cantilever beam. J. Sound Vibr. 2000, 238, 1–18. [Google Scholar] [CrossRef]
- Deng, Z.; Huang, M.; Wan, N.; Zhang, J. The Current Development of Structural Health Monitoring for Bridges: A Review. Buildings 2023, 13, 1360. [Google Scholar] [CrossRef]
- Luo, J.; Huang, M.; Lei, Y. Temperature Effect on Vibration Properties and Vibration-Based Damage Identification of Bridge Structures: A Literature Review. Buildings 2022, 12, 1209. [Google Scholar] [CrossRef]
- Liu, C.; DeWolf, J.T. Effect of temperature on modal variability of a curved concrete bridge under ambient loads. J. Struct. Eng. 2007, 133, 1742–1751. [Google Scholar] [CrossRef]
- Xia, Y.; Hao, H.; Zanardo, G.; Deeks, A. Long term vibration monitoring of an RC slab: Temperature and humidity effect. Eng. Struct. 2006, 28, 441–452. [Google Scholar] [CrossRef]
- Sohn, H. Effects of environmental and operational variability on structural health monitoring. Philos. Trans. A Math. Phys. Eng. Sci. 2007, 365, 539–560. [Google Scholar] [CrossRef]
- Peeters, B.; De Roeck, G. One-year monitoring of the Z24-Bridge: Environmental effects versus damage events. Earthq. Eng. Struct. Dyn. 2001, 30, 149–171. [Google Scholar] [CrossRef]
- Limongelli, M.P. Frequency response function interpolation for damage detection under changing environment. Mech. Syst. Signal Process. 2010, 24, 2898–2913. [Google Scholar] [CrossRef]
- Karakostas, C.; Quaranta, G.; Chatzi, E.; Zülfikar, A.C.; Çetindemir, O.; De Roeck, G.; Döhler, M.; Limongelli, M.P.; Lombaert, G.; Apaydın, N.M.; et al. Seismic assessment of bridges through structural health monitoring: A state-of-the-art review. Bull. Earthq. Eng. 2023, 22, 1309–1357. [Google Scholar] [CrossRef] [PubMed]
- Ponzo, F.C.; Auletta, G.; Ielpo, P.; Ditommaso, R. DInSAR–SBAS satellite monitoring of infrastructures: How temperature affects the “Ponte della Musica” case study. J. Civ. Struct. Health Monit. 2024. [Google Scholar] [CrossRef]
- Mucciarelli, M.; Gallipoli, M.R. Non-parametric analysis of a single seismometric recording to obtain building dynamic parameters. Ann. Geophys. 2007. [Google Scholar] [CrossRef]
- Duffing, G. Erzwungene Schwingungen bei veränderlicher Eigenfrequenz und ihre Technische Bedeutung; [Forced oscillations with variable natural frequency and their technical relevance]; Vieweg: Braunschweig, Germany, 1918; Volume Heft 41/42, p. vi+134, OCLC 12003652. (In German) [Google Scholar]
- Gabos, Z.; Barton, D.A.W.; Dombovari, Z. Equation-free bifurcation analysis of a stochastically excited Duffing oscillator. J. Sound Vib. 2023, 547, 117536. [Google Scholar] [CrossRef]
- Lobo, D.M.; Ritto, T.G.; Castello, D.A.; Cataldo, E. Dynamics of a Duffing oscillator with the stiffness modeled as a stochastic process. Int. J. Non-Linear Mech. 2019, 116, 273–280. [Google Scholar] [CrossRef]
- Cui, J.; Jiang, W.A.; Xia, Z.W.; Chen, L.Q. Non-stationary response of variable-mass Duffing oscillator with mass disturbance modeled as Gaussian white noise. Physica A 2019, 526, 121018. [Google Scholar] [CrossRef]
- MATLAB R2023b Software 1994–2024; The MathWorks, Inc.: Natick, MA, USA, 2023.
- Kevin, P. MacKeown Stochastic Simulation in Physics; Springer: Berlin/Heidelberg, Germany, 1997; ISBN 981-3083-26-3. [Google Scholar]
- Bernd, A. Berg Markov Chain Monte Carlo Simulations and Their Statistical Analysis (with Web-Based Fortran Code); World Scientific: Singapore, 2004; ISBN 981-238-935-0. [Google Scholar]
- Villani, L.G.G.; Da Silva, S.; Cunha, A., Jr. Identification of a nonlinear beam through a stochastic model based on a duffing oscillator. In Proceedings of the 6th International Conference on Nonlinear Science and Complexity, São José dos Campos, Brazil, 16–20 May 2017. [Google Scholar] [CrossRef]
- Villani, L.G.; Silva, S.D.; Cunha, A. Application of a stochastic version of the restoring force surface method to identify a Duffing oscillator. In Proceedings of the First International Nonlinear Dynamics Conference, NODYCON 2019, Rome, Italy, 17–20 February 2019; pp. 1–3. [Google Scholar]
- Newmark, N.M. A method of computation for structural dynamics. J. Eng. Mech. Div. 1959, 85, 67–94. [Google Scholar] [CrossRef]
- Felicetta, C.; Russo, E.; D’Amico, M.; Sgobba, S.; Lanzano, G.; Mascandola, C.; Pacor, F.; Luzi, L. Italian Accelerometric Archive v4.0—Istituto Nazionale di Geofisica e Vulcanologia, Dipartimento della Protezione Civile Nazionale. 2023. Available online: https://itaca.mi.ingv.it/ItacaNet_40/#/home (accessed on 27 February 2024).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Event Name | Event Date | Magnitude W | Epicentral Distance (km) | Component | PGA (m/s2) |
|---|---|---|---|---|---|
| Central Italy | 21 January 2017 | 3.7 | 3.7 | E-W | −0.547 |
| Central Italy | 21 January 2017 | 3.7 | 3.7 | N-S | −0.619 |
| Central Italy | 31 August 2016 | 3.5 | 4.5 | E-W | 0.753 |
| Central Italy | 31 August 2016 | 3.5 | 4.5 | N-S | −0.504 |
| Central Italy | 23 April 2009 | 3.9 | 3.2 | E-W | 0.623 |
| Central Italy | 23 April 2009 | 3.9 | 3.2 | N-S | −0.321 |
| 5th Percentage | 25th Percentage | 75th Percentage | 95th Percentage | |
|---|---|---|---|---|
| 1 Hz System | −2.3% | −2.3% | 2.5% | 2.5% |
| 5 Hz System | −4.9% | −1.9% | 1.0% | 4.9% |
| 10 Hz System | −11.2% | −2.9% | 1.0% | 2.9% |
| MEAN | −6.1% | −2.4% | 1.5% | 3.4% |
| 5th Percentage | 25th Percentage | 75th Percentage | 95th Percentage | |
|---|---|---|---|---|
| 1 Hz System | −2.3% | −2.3% | 2.5% | 2.5% |
| 5 Hz System | −1.0% | −1.0% | 1.0% | 1.0% |
| 10 Hz System | −0.0% | −0.0% | 0.8% | 0.8% |
| MEAN | −1.1% | −1.1% | 1.4% | 1.4% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ditommaso, R.; Ponzo, F.C. Identifying Damage in Structures: Definition of Thresholds to Minimize False Alarms in SHM Systems. Buildings 2024, 14, 821. https://doi.org/10.3390/buildings14030821
Ditommaso R, Ponzo FC. Identifying Damage in Structures: Definition of Thresholds to Minimize False Alarms in SHM Systems. Buildings. 2024; 14(3):821. https://doi.org/10.3390/buildings14030821
Chicago/Turabian StyleDitommaso, Rocco, and Felice Carlo Ponzo. 2024. "Identifying Damage in Structures: Definition of Thresholds to Minimize False Alarms in SHM Systems" Buildings 14, no. 3: 821. https://doi.org/10.3390/buildings14030821
APA StyleDitommaso, R., & Ponzo, F. C. (2024). Identifying Damage in Structures: Definition of Thresholds to Minimize False Alarms in SHM Systems. Buildings, 14(3), 821. https://doi.org/10.3390/buildings14030821