
Using RPA for Performance Monitoring of Dynamic SHM Applications

 ,
,  ,
,  and
and 
Abstract
:1. Introduction
- Executing the Arduino code;
- Making sure the accelerometer is responsive;
- Executing the data acquisition code; and
- Constantly checking the data acquisition process for probable errors.
- Checking the connectivity of all channels connected to the axis of the accelerometers;
- Checking the response and status of every accelerometer;
- Setting the data acquisition process preferences;
- Controlling the flow of information for any possible irregularity; and
- Checking the outputs of every single channel to see if every single accelerometer is still operative or if some of the accelerometers have gone offline due to a lack of electricity, excessive ambient temperature, heavy induced vibrations, or other issues that might have broken the accelerometers.
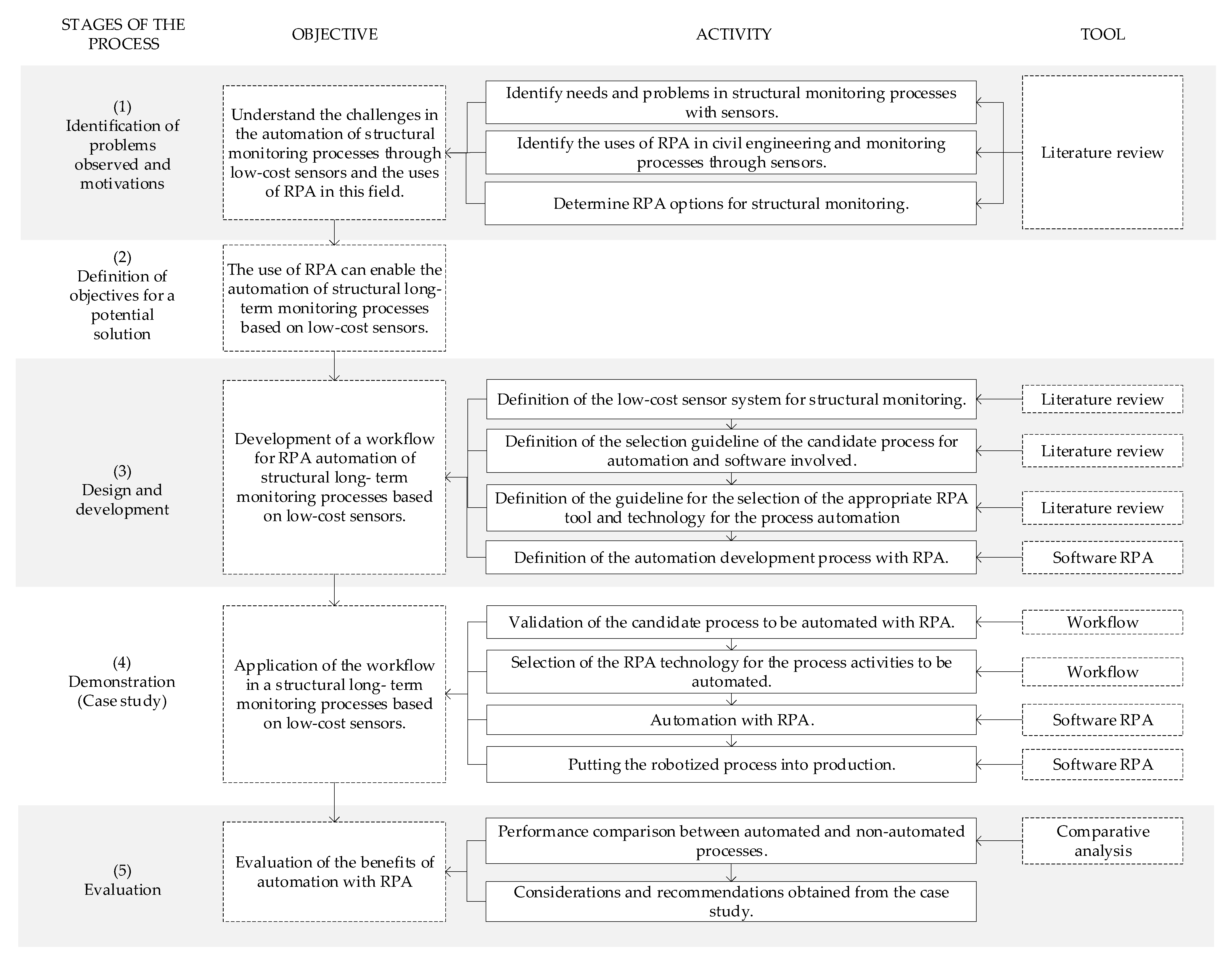
2. Research Methodology
- Identifying problems and needs in structural monitoring processes with low-cost sensors and the manual data processing.
- Identifying the uses of RPA in civil engineering and structural monitoring processes.
- Determining RPA options to apply to the structural monitoring process with low-cost sensors.
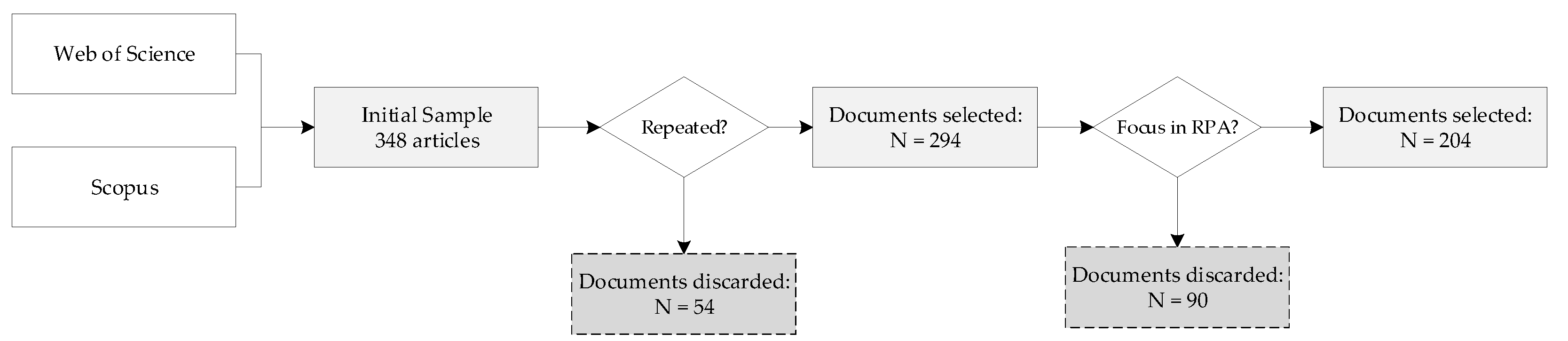
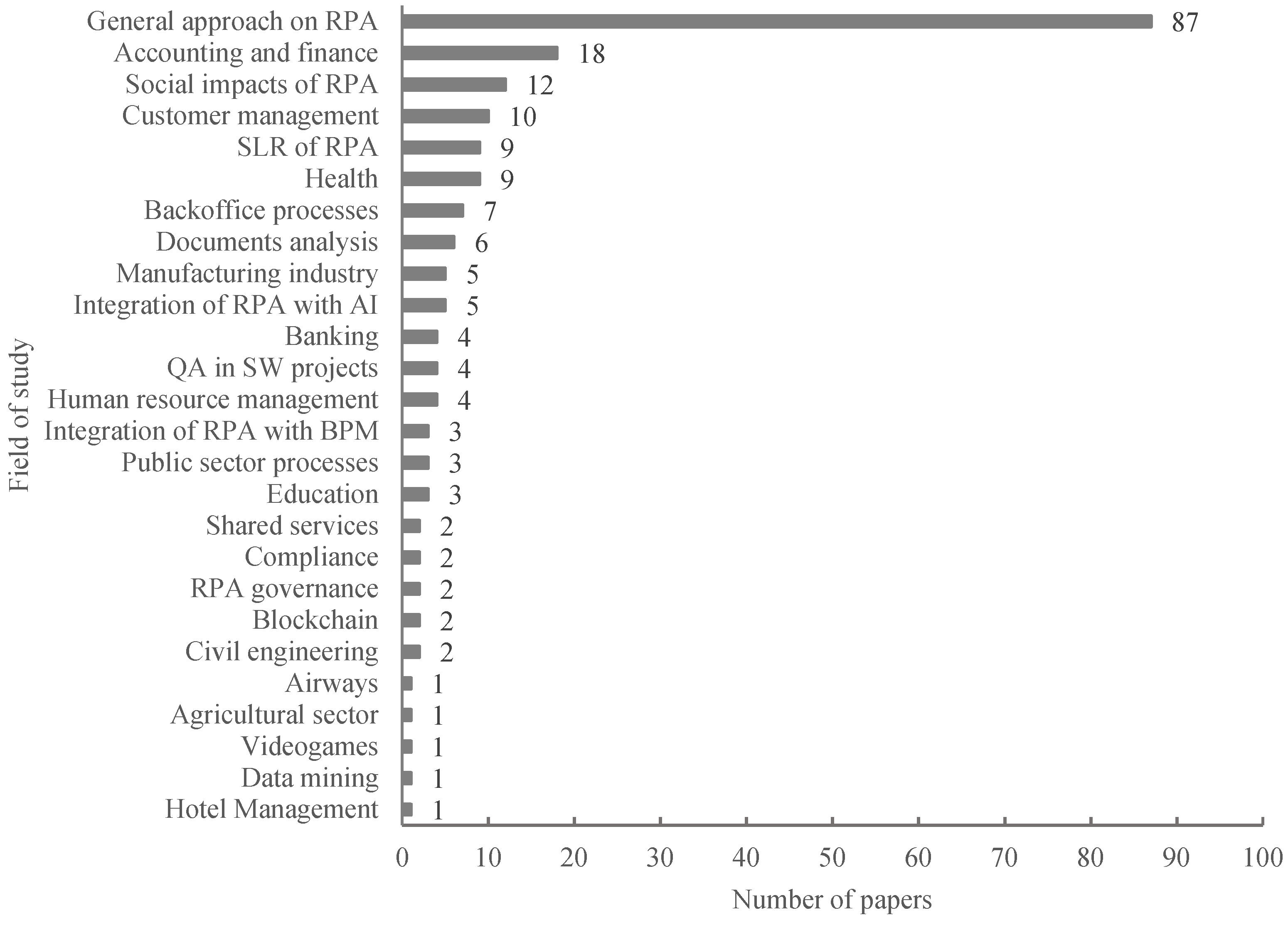
3. Literature Review
3.1. IoT in SHM
3.2. Robotic Process Automation
4. RPA Development Method
4.1. RPA Workflow
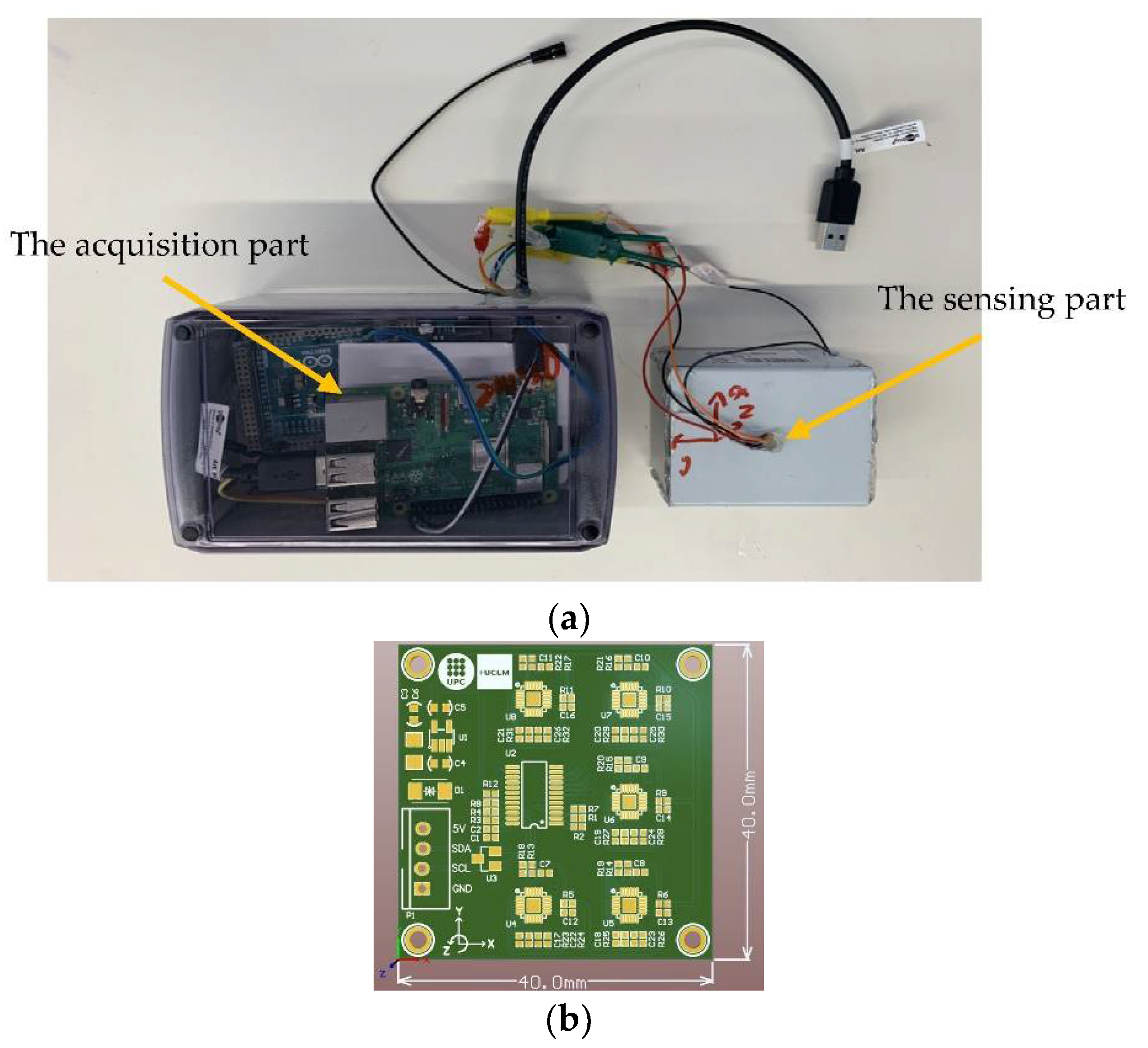
4.2. Representation of the Needed Steps for Data Acquisition Process of a SARA
5. Case Study: Use of RPA to Control Information from SHM Obtained with a SARA
5.1. Process Discovery and RPA Governance Preconditions
5.2. Process To-Be Design
5.3. RPA Deployment and Testing
5.4. Operation and Maintenance
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Proske, D. Fatalities due to bridge collapse. In Proceedings of the Institution of Civil Engineers—Bridge Engineering; Thomas Telford Ltd.: London, UK, 2020; Volume 173, pp. 1–24. [Google Scholar]
- Won, J.; Park, J.-W.; Park, J.; Shin, J.; Park, M. Development of a Reference-Free Indirect Bridge Displacement Sensing System. Sensors 2021, 21, 5647. [Google Scholar] [CrossRef] [PubMed]
- Rizzo, P.; Enshaeian, A. Challenges in Bridge Health Monitoring: A Review. Sensors 2021, 21, 4336. [Google Scholar] [CrossRef] [PubMed]
- Ha, D.W.; Park, H.S.; Choi, S.W.; Kim, Y. A Wireless MEMS-Based Inclinometer Sensor Node for Structural Health Monitoring. Sensors 2013, 13, 16090–16104. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mobaraki, B.; Lozano-Galant, F.; Soriano, R.P.; Pascual, F.J.C. Application of Low-Cost Sensors for Building Monitoring: A Systematic Literature Review. Buildings 2021, 11, 336. [Google Scholar] [CrossRef]
- Farré-Checa, J.; Komarizadehasl, S.; Ma, H.; Lozano-Galant, J.; Turmo, J. Direct simulation of the tensioning process of cable-stayed bridge cantilever construction, Automation in Construction. Autom. Constr. 2022, 137, 104197. [Google Scholar] [CrossRef]
- Kang, J.-S.; Chung, K.; Hong, E.J. Multimedia knowledge-based bridge health monitoring using digital twin. Multimed. Tools Appl. 2021, 80, 34609–34624. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, Y.; Fu, J.; Liu, A.; Gao, W. Measurement of the real-time deflection of cable-stayed bridge based on cable tension variations. Meas. J. Int. Meas. Confederat. 2018, 119, 218–228. [Google Scholar] [CrossRef]
- Komarizadehasl, S.; Khanmohammadi, M. Novel plastic hinge modification factors for damaged RC shear walls with bending performance. Adv. Concr. Constr. 2021, 12, 355–365. [Google Scholar] [CrossRef]
- Komarizadehasl, S.; Mobaraki, B.; Lozano-galant, J.A. A Comprehensive Description of a Low-Cost Wireless Dynamic Real-Time Data Acquisition and Monitoring System. In Proceedings of the 15th Edition of the International Conference on Durability of Building Materials and Components, (DBMC 2020), Barcelona, Catalonia, 20–23 October 2020; pp. 1–6. [Google Scholar]
- Sun, L.; Shang, Z.; Xia, Y.; Bhowmick, S.; Nagarajaiah, S. Review of Bridge Structural Health Monitoring Aided by Big Data and Artificial Intelligence: From Condition Assessment to Damage Detection. J. Struct. Eng 2020, 146, 04020073–04020095. [Google Scholar] [CrossRef]
- Muttillo, M.; Stornelli, V.; Alaggio, R.; Paolucci, R. Structural Health Monitoring: An IoT Sensor System. Sensors 2020, 20, 4908. [Google Scholar] [CrossRef]
- Aloisio, A.; Di Battista, L.; Alaggio, R.; Fragiacomo, M. Sensitivity analysis of subspace-based damage indicators under changes in ambient excitation covariance, severity and location of damage. Eng. Struct. 2020, 208, 11023. [Google Scholar] [CrossRef]
- Peng, T.; Nogal, M.; Casas, J.R.; Lozano-Galant, J.A.; Turmo, J. Constrained observability techniques for structural system identification using modal analysis. J. Sound Vib. 2020, 479, 115368–115384. [Google Scholar] [CrossRef]
- Peng, T.; Nogal, M.; Casas, J.R.; Turmo, J. Planning low-error SHM strategy by constrained observability method. Autom. Constr. 2021, 127, 103707. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q. Model Updating of Railway Bridge Using in Situ Dynamic Displacement Measurement under Trainloads. J. Bridge Eng. 2015, 20, 04015019–04015031. [Google Scholar] [CrossRef]
- Guo, T.; Frangopol, D.M.; Chen, Y. Fatigue reliability assessment of steel bridge details integrating weigh-in-motion data and probabilistic finite element analysis. Comput. Struct. 2012, 112–113, 245–257. [Google Scholar] [CrossRef]
- Komarizadehasl, S.; Mobaraki, B.; Ma, H.; Lozano-Galant, J.-A.; Turmo, J. Development of a Low-Cost System for the Accurate Measurement of Structural Vibrations. Sensors 2021, 21, 6191. [Google Scholar] [CrossRef]
- Komarizadehasl, S.; Mobaraki, B.; Ma, H.; Lozano-Galant, J.-A.; Turmo, J. Low-Cost Sensors Accuracy Study and Enhancement Strategy. Appl. Sci. 2022, 12, 3186. [Google Scholar] [CrossRef]
- Lei, J.; Nogal, M.; Lozano-Galant, J.A.; Xu, D.; Turmo, J. Constrained observability method in static structural system identification. Struct. Control. Health Monit. 2018, 25, e2040. [Google Scholar] [CrossRef]
- Tomàs, D.; Lozano-Galant, J.A.; Ramos, G.; Turmo, J. Structural system identification of thin web bridges by observability techniques considering shear deformation. Thin-Walled Struct. 2018, 123, 282–293. [Google Scholar] [CrossRef] [Green Version]
- Bhowmik, B.; Tripura, T.; Hazra, B.; Pakrashi, V. Robust linear and nonlinear structural damage detection using recursive canonical correlation analysis. Mech. Syst. Signal Process. 2020, 136, 106499. [Google Scholar] [CrossRef]
- Giordano, P.; Quqa, S.; Limongelli, M. Statistical Approach for Vibration-Based Damage Localization in Civil Infrastructures Using Smart Sensor Networks. Infrastructures 2021, 6, 22. [Google Scholar] [CrossRef]
- Bhowmik, B.; Tripura, T.; Hazra, B.; Pakrashi, V. Real time structural modal identification using recursive canonical correlation analysis and application towards online structural damage detection. J. Sound Vib. 2020, 468, 115101. [Google Scholar] [CrossRef]
- Straub, D.; Chatzi, E.; Bismut, E.; Courage, W.; Döhler, M.; Faber, M.H.; Köhler, J.; Lombaert, G.; Omenzetter, P.; Pozzi, M.; et al. Value of information: A roadmap to quantifying the benefit of structural health monitoring. In Proceedings of the 12th International Conference on Structural Safety & Reliability, Vienna, Austria, 6–10 August 2017; pp. 3018–3029. Available online: https://hal.inria.fr/hal-01577257 (accessed on 23 February 2020).
- Panda, S.; Tripura, T.; Hazra, B. First-Order Error-Adapted Eigen Perturbation for Real-Time Modal Identification of Vibrating Structures. J. Vib. Acoust. 2021, 143, 051001. [Google Scholar] [CrossRef]
- Bhowmik, B.; Panda, S.; Hazra, B.; Pakrashi, V. Feedback-driven error-corrected single-sensor analytics for real-time condition monitoring. Int. J. Mech. Sci. 2022, 214, 106898. [Google Scholar] [CrossRef]
- Sekuła, K.; Kołakowski, P. Piezo-based weigh-in-motion system for the railway transport. Struct. Control. Health Monit. 2012, 19, 199–215. [Google Scholar] [CrossRef]
- Pathak, B.; Kumar, P.; Sharma, A.; Kumar, R. Earthquake Detector Using Arduino Uno. 2019. Available online: http://122.252.232.85:8080/jspui/handle/123456789/22911 (accessed on 27 December 2019).
- Ali, A.S.; Zanzinger, Z.; DeBose, D.; Stephens, B. Open Source Building Science Sensors (OSBSS): A low-cost Arduino-based platform for long-term indoor environmental data collection. Build. Environ. 2016, 100, 114–126. [Google Scholar] [CrossRef] [Green Version]
- Ozdagli, A.I.; Liu, B.; Moreu, F. Low-cost, efficient wireless intelligent sensors (LEWIS) measuring real-time reference-free dynamic displacements. Mech. Syst. Signal Process. 2018, 107, 343–356. [Google Scholar] [CrossRef]
- Meng, Q.; Zhu, S. Developing iot sensing system for construction-induced vibration monitoring and impact assessment. Sensors 2020, 20, 6120. [Google Scholar] [CrossRef]
- Grimmelsman, K.A.; Zolghadri, N. Experimental evaluation of low-cost accelerometers for dynamic characterization of bridges. In Conference Proceedings of the Society for Experimental Mechanics Series; Springer: New York, NY, USA, 2020; pp. 145–152. [Google Scholar] [CrossRef]
- Komarizadehasl, S.; Mobaraki, B.; Lozano-Galant, J.A.; Turmo, J. Evaluation of low-cost angular measuring sensors. In Proceedings of the International Conference of Recent Trends in Geotechnical and Geo-Environmental Engineering and Education, Brisbane, Australia, 10–11 September 2020; RTCEE/RTGEE. 2020; pp. 17–21. Available online: https://upcommons.upc.edu/handle/2117/328769 (accessed on 20 September 2020).
- Analog Devices, ADXL 335 Data-Sheet, (n.d.). Available online: https://www.sparkfun.com/datasheets/Components/SMD/adxl335.pdf (accessed on 1 August 2020).
- PCB Piezotronics, 393A03 Data-Sheet. 2008. Available online: https://www.pcb.com/contentstore/docs/PCB_Corporate/Vibration/Products/Manuals/393A03.pdf (accessed on 1 August 2020).
- PCB Piezotronics Model 3711D1FA20G DC Accelerometer Installation and Operating Manual. Available online: https://www.pcbpiezotronics.fr/wp-content/uploads/3741E122G.pdf (accessed on 19 April 2022).
- Girolami, A.; Zonzini, F.; De Marchi, L.; Brunelli, D.; Benini, L. Modal Analysis of Structures with Low-cost Embedded Systems. In Proceedings of the International Symposium on Circuits and Systems, Florence, Italy, 27–30 May 2018; pp. 1–4. [Google Scholar] [CrossRef]
- ST, LIS344ALH Data-Sheet. 2008. Available online: https://www.st.com/resource/en/datasheet/lis344alh.pdf (accessed on 1 August 2020).
- InvenSense, MPU6050 Data-Sheet. 2013. Available online: https://www.invensense.com/wp-content/uploads/2015/02/MPU-6000-Datasheet1.pdf%0A (accessed on 1 August 2020).
- Aguero, M.; Ozdagli, A.; Moreu, F. Measuring reference-free total displacements of piles and columns using low-cost, battery-powered, efficientwireless intelligent sensors (LEWIS2). Sensors 2019, 19, 1549. [Google Scholar] [CrossRef] [Green Version]
- Huerta, R.C.; Moreu, F.; Galant, J.L. Aerial Tramway Sustainable Monitoring with an Outdoor Low-Cost Efficient Wireless Intelligent Sensor. Sustainability 2021, 13, 6340. [Google Scholar] [CrossRef]
- Komarizadehasl, S.; Lozano, F.; Lozano-Galant, J.-A.; Ramos, G.; Turmo, J. Low-Cost Wireless Structural Health Monitoring of Bridges. Sensors 2022, 22, 5725. [Google Scholar] [CrossRef]
- Elhattab, A.; Uddin, N.; Obrien, E. OBrien, Extraction of Bridge Fundamental Frequencies Utilizing a Smartphone MEMS Accelerometer. Sensors 2019, 19, 3143. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Testoni, N.; Aguzzi, C.; Arditi, V.; Zonzini, F.; De Marchi, L.; Marzani, A.; Cinotti, T.S. A Sensor Network with Embedded Data Processing and Data-to-Cloud Capabilities for Vibration-Based Real-Time SHM. J. Sens. 2018, 2018, 2107679. [Google Scholar] [CrossRef]
- Magdaleno, A.; Villacorta, J.J.; Del-Val, L.; Izquierdo, A.; Lorenzana, A. Measurement of Acceleration Response Functions with Scalable Low-Cost Devices. An Application to the Experimental Modal Analysis. Sensors 2021, 21, 6637. [Google Scholar] [CrossRef]
- Guzman-Acevedo, G.M.; Vazquez, E.; Millan-Almaraz, J.R.; Rodriguez-Lozoya, H.E.; Reyes-Salazar, A.; Gaxiola-Camacho, J.R.; Félix, C.A.M. GPS, Accelerometer, and Smartphone Fused Smart Sensor for SHM on Real-Scale Bridges. Adv. Civ. Eng. 2019, 2019, 6429430. [Google Scholar] [CrossRef]
- Makoond, N.; Pelà, L.; Molins, C.; Roca, P.; Alarcón, D. Automated data analysis for static structural health monitoring of masonry heritage structures. Struct. Control. Health Monit. 2020, 27, e2581. [Google Scholar] [CrossRef]
- Micle, D.; Deiac, F.; Olar, A.; Drența, R.; Florean, C.; Coman, I.; Arion, F. Research on innovative business plan. Smart cattle farming using artificial intelligent robotic process automation. Agriculture 2021, 11, 430. [Google Scholar] [CrossRef]
- Asatiani, A.; Penttinen, E. Turning robotic process automation into commercial success—Case OpusCapita. J. Inf. Technol. Teach. Cases 2016, 6, 67–74. [Google Scholar] [CrossRef]
- IEEE. IEEE Guide for Terms and Concepts in Intelligent Process Automation; IEEE Corporate Advisory Group: Piscataway, NJ, USA, 2017. [Google Scholar]
- Van Chuong, L.; Hung, P.D.; Diep, V.T. Robotic Process Automation and Opportunities for Vietnamese Market. In Proceedings of the 2019 7th International Conference on Computer and Communications Management, Bangkok, Thailand, 27–29 July 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 86–90. [Google Scholar] [CrossRef]
- Syed, R.; Suriadi, S.; Adams, M.; Bandara, W.; Leemans, S.J.; Ouyang, C.; ter Hofstede, A.H.; van de Weerd, I.; Wynn, M.T.; Reijers, H.A. Robotic Process Automation: Contemporary themes and challenges. Comput. Ind. 2020, 115, 103162. [Google Scholar] [CrossRef]
- Kokina, J.; Gilleran, R.; Blanchette, S.; Stoddard, D. Accountant as digital innovator: Roles and competencies in the age of automation. Account. Horiz. 2021, 35, 153–184. [Google Scholar] [CrossRef]
- Madakam, S. The Future Digital Work Force: Robotic Process Automation (Rpa). J. Inf. Syst. Technol.Manag.—Jistem USP 2019, 53, 1689–1699. [Google Scholar] [CrossRef]
- Geyer-klingeberg, J.; Nakladal, J.; Baldauf, F.; Veit, F. Process Mining and Robotic Process Automation: A Perfect Match Process Mining as Enabler for RPA Implementation. In Proceedings of the 16th International Conference on Business Process, Management 2018, Industry Track Session, Sydney, Australia, 10 September 2018. [Google Scholar]
- Blue Prism Software Robots. The Art of Possibility. Available online: https://www.blueprism.com/uploads/resources/white-papers/Blue-Prism-Product-Overview-Enterprise-Edition.pdf (accessed on 19 April 2022).
- Karn, S.; Kotecha, R. RPA-based Implementation of IoT. In Proceedings of the 4th International Conference on Advances in Science & Technology (ICAST2021), Mumbai, India, 9 May 2021. [Google Scholar] [CrossRef]
- Mishra, M.; Lourenço, P.B.; Ramana, G.V. Structural health monitoring of civil engineering structures by using the internet of things: A review. J. Build. Eng. 2022, 48, 103954. [Google Scholar] [CrossRef]
- Van Aken, J.E.; Romme, G.L. A Design Science Approach to Evidence-Based Management; Oxford University Press: Oxford, UK, 2012; pp. 140–184. [Google Scholar]
- Peffers, K.; Tuunanen, T.; Rothenberger, M.A.; Chatterjee, S. A Design Science Research Methodology for Information Systems Research A Design Science Research Methodology for Information Systems Research. J. Manag. Inf. Syst. 2007, 24, 45–77. [Google Scholar] [CrossRef]
- Romero-Chambi, E.; Villarroel-Quezada, S.; Atencio, E.; Rivera, F.M.-L. Analysis of Optimal Flight Parameters of Unmanned Aerial Vehicles (UAVs) for Detecting Potholes in Pavements. Appl. Sci. 2020, 10, 4157. [Google Scholar] [CrossRef]
- Prosser-Contreras, M.; Atencio, E.; La Rivera, F.M.; Herrera, R.F. Use of unmanned aerial vehicles (Uavs) and photogrammetry to obtain the international roughness index (iri) on roads. Appl. Sci. 2020, 10, 8788. [Google Scholar] [CrossRef]
- Jacob-Loyola, N.; Rivera, F.M.-L.; Herrera, R.; Atencio, E. Unmanned aerial vehicles (Uavs) for physical progress monitoring of construction. Sensors 2021, 21, 4227. [Google Scholar] [CrossRef] [PubMed]
- Díaz, G.; Herrera, R.F.; Rivera, F.M.-L.; Atencio, E. Generative design for dimensioning of retaining walls. Mathematics 2021, 9, 1918. [Google Scholar] [CrossRef]
- Lee, J.-L.; Tyan, Y.-Y.; Wen, M.-H.; Wu, Y.-W. Development of an ioT-based bridge safety monitoring system. In Proceedings of the 2017 IEEE International Conference on Applied System Innovation: Applied System Innovation for Modern Technology, Sapporo, Japan, 13–17 May 2017; pp. 84–86. [Google Scholar] [CrossRef]
- Raposo, D.; Rodrigues, A.; Sinche, S.; Silva, J.S.; Boavida, F. Industrial IoT monitoring: Technologies and architecture proposal. Sensors 2018, 18, 3568. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Varma, A.; Prabhakar, S.; Jayavel, K. Gas Leakage Detection and Smart Alerting and prediction using IoT. In Proceedings of the 2017 2nd International Conference on Computing and Communications Technologies (ICCCT), Chennai, India, 23–24 February 2017; pp. 327–333. [Google Scholar] [CrossRef]
- Kanawaday, A.; Sane, A. Machine learning for predictive maintenance of industrial machines using IoT sensor data. In Proceedings of the IEEE International Conference on Software Engineering and Service Sciences (ICSESS), Beijing, China, 24–26 November 2017; pp. 87–90. [Google Scholar] [CrossRef]
- Nagajayanthi, B. Decades of Internet of Things Towards Twenty-first Century: A Research-Based Introspective. Wirel. Pers. Commun. 2021, 123, 3661–3697. [Google Scholar] [CrossRef]
- Huo, J.; Lee, C.K. Intelligent workload balance control of the assembly process considering condition-based maintenance. Adv. Eng. Inform. 2021, 49, 101341. [Google Scholar] [CrossRef]
- Chmielarz, G. Present state and future application of smart technologies in manufacturing processes. Prod. Eng. Arch. 2019, 24, 14–19. [Google Scholar] [CrossRef] [Green Version]
- Santor, E. The Impact of Digitalization on the Economy: A Review Article on the NBER Volume Economics of Artificial Intelligence: An Agenda. Int. Product. Monit. 2020, 39, 81–90. [Google Scholar]
- Pillay, C.P.; Njenga, J.K. Opportunities for Reducing Expenses through Digital Innovation: The Case of an Insurance Company. Afr. J. Inf. Syst. 2021, 13, 99–112. [Google Scholar]
- Rane, S.B.; Narvel, Y.A.M. Leveraging the industry 4.0 technologies for improving agility of project procurement management processes. Int. J. Syst. Assur. Eng. Manag. 2021, 12, 1146–1172. [Google Scholar] [CrossRef]
- Finance, I. The Role of Business Leaders in Information Technology Innovation in the New Era of Disruptive Technology. Asian J. Account. Gov. 2019, 12, 133–142. [Google Scholar] [CrossRef]
- Kumar, V.S.; Krishnamoorthi, C. Development of electrical transduction based wearable tactile sensors for human vital signs monitor: Fundamentals, methodologies and applications. Sens. Actuators A Phys. 2021, 321, 112582. [Google Scholar] [CrossRef]
- Patel, M.; Shukla, A.; Porwal, R.; Kotecha, R. Customized Automated Email Response Bot using Machine Learning and Robotic Process Automation. In Proceedings of the 2nd International Conference on Advances in Science & Technology (ICAST) 2019, Mumbai, India, 8–9 April 2019; Somaiya, K.J., Ed.; Institute of Engineering & Information Technology: Mumbai, India, 2019. [Google Scholar]
- Wojciechowska-Filipek, S. Automation of the process of handling enquiries concerning information constituting a bank secret. Banks Bank Syst. 2019, 14, 175–186. [Google Scholar] [CrossRef]
- Souto, F.V.; Coello, R.P.; Olguín Barrón, F.C. COSMIC sizing of RPA software: A case study from a proof of concept implementation in a banking organization. CEUR Workshop Proc. 2020, 2725, 1–15. [Google Scholar]
- Wellmann, C.; Stierle, M.; Dunzer, S.; Matzner, M. A Framework to Evaluate the Viability of Robotic Process Automation for Business Process Activities. Lect. Notes Bus. Inf. Process. 2020, 393, 200–214. [Google Scholar] [CrossRef]
- Axmann, B.; Harmoko, H. Robotic Process Automation: An Overview and Comparison to Other Technology in Industry 4.0. In Proceedings of the 2020 10th International Conference on Advanced Computer Information Technologies (ACIT), Deggendorf, Germany, 16–18 September 2020; pp. 559–562. [Google Scholar] [CrossRef]
- Gupta, S.; Rani, S.; Dixit, A. Recent Trends in Automation-A study of RPA Development Tools. In Proceedings of the 2019 3rd International Conference on Recent Developments in Control, Automation and Power Engineering (RDCAPE), Noida, India, 10–11 October 2019; pp. 159–163. [Google Scholar] [CrossRef]
- Dey, S.; Das, A. Robotic process automation: Assessment of the technology for transformation of business processes. Int. J. Bus. Process Integr. Manag. 2019, 9, 220–230. [Google Scholar] [CrossRef]
- Huang, F.; Vasarhelyi, M.A. Applying robotic process automation (RPA) in auditing: A framework. Int. J. Account. Inf. Syst. 2019, 35, 100433. [Google Scholar] [CrossRef]
- Zhang, C. Intelligent Process Automation in Audit. J. Emerg. Technol. Account. 2019, 16, 69–88. [Google Scholar] [CrossRef]
- Cooper, L.A.; Holderness, D.K.; Sorensen, T.L.; Wood, D.A. Robotic process automation in public accounting. Account. Horiz. 2019, 33, 15–35. [Google Scholar] [CrossRef]
- Hattingh, M.; Matthee, M.; Smuts, H.; Pappas, I.; Dwivedi, Y.K.; Mäntymäki, M. Correction to: Responsible Design, Implementation and Use of Information and Communication Technology. In Conference on e-Business, e-Services and e-Society; Springer: Cham, Switzerland, 2021. [Google Scholar] [CrossRef]
- Oshri, I.; Plugge, A. What Do You See in Your Bot? Lessons from KAS Bank. In International Workshop on Global Sourcing of Information Technology and Business Processes; Springer: Cham, Switzerland, 2020; pp. 145–161. [Google Scholar] [CrossRef]
- Di-Francescomarino, C.; Dijkman, R.; Zdun, U. Business Process Management Workshops: Lecture Notes in Business Information Processing Series. In Proceedings of the BPM 2019 International Workshops, Vienna, Austria, 1–6 September 2019; Revised Selected Papers. Springer: Berlin/Heidelberg, Germany, 2019; Volume 17, pp. 523–534. [Google Scholar]
- Noppen, P.; Beerepoot, I.; van de Weerd, I.; Jonker, M.; Reijers, H.A. How to keep RPA maintainable? In International Conference on Business Process Management; Springer: Cham, Switzerland, 2020; pp. 453–470. [Google Scholar] [CrossRef]
- Snapp, S. Gartner and the Magic Quadrant: A Guide for Buyers; Vendors and Investors, SCM Focus Press: Phoenix, AZ, USA, 2013. [Google Scholar]
- UiPath Gartner’s Magic Quadrant RPA. Available online: https://www.uipath.com/es/company/rpa-analyst-reports/gartner-magic-quadrant-robotic-process-automation (accessed on 10 June 2021).
- UiPath RPA Technologies. Available online: https://www.uipath.com/es/soluciones/segun-tecnologia (accessed on 10 June 2021).
- Axmann, B.; Harmoko, H. The Five Dimensions of Digital Technology Assessment with the Focus on Robotic Process Automation (RPA). Teh. Glas. 2021, 15, 267–274. [Google Scholar] [CrossRef]
- Hwang, M.-H.; Na, U.-K.; Lee, S.; Cho, B.; Kim, Y.; Lee, D.; Shin, J. MIORPA: Middleware System for open-source robotic process automation. J. Comput. Sci. Eng. 2020, 14, 19–25. [Google Scholar] [CrossRef]
- Anagnoste, S. Robotic Automation Process—The operating system for the digital enterprise. In Proceedings of the International Conference on Business Excellence, Bucharest, Romania, 22–23 March 2018; Volume 12, pp. 54–69. [Google Scholar] [CrossRef] [Green Version]
- Martins, C. Robotic Process Automation: A Lean Approach to RPA; Instituto Superior Técnico: Lisboa, Portugal, 2018. [Google Scholar]
- Jimenez-Ramirez, A.; Reijers, H.A.; Barba, I.; Del Valle, C. A Method to Improve the Early Stages of the Robotic Process Automation Lifecycle. In Advanced Information Systems Engineering; CAiSE 2019; Lecture Notes in Computer Science; Giorgini, P., Weber, B., Eds.; Springer: Cham, Switzerland, 2019; Volume 11483. [Google Scholar] [CrossRef]
- Kokina, J.; Blanchette, S. Early evidence of digital labor in accounting: Innovation with Robotic Process Automation. Int. J. Account. Inf. Syst. 2019, 35, 100431. [Google Scholar] [CrossRef]
- Sönmez, E.; Börekçi, D.Y. A conceptual study on RPAs as of intelligent automation. Adv. Intell. Syst. Comput. 2020, 1029, 65–72. [Google Scholar] [CrossRef]
- Willcocks, L.; Hindle, J.; Lacity, M. Keys to RPA Sucess—How Blue Prism Clients Are Gaining Superior Long-Term Business Value. Available online: https://www.blueprism.com/resources/white-papers/keys-to-rpa-success-how-blue-prism-clients-are-gaining-superior-long-term-business-value/ (accessed on 19 April 2022).
- Saxena, S.; Tripathi, S.; Tsb, S. Deep robot-human interaction with facial emotion recognition using gated recurrent units & robotic process automation. Front. Artif. Intell. Appl. 2020, 332, 115–126. [Google Scholar] [CrossRef]
- Shah, K.; Prabhakar, T.V.; Sarweshkumar, C.R.; Abhishek, S.V. Construction of a Digital Twin Framework using Free and Open-Source Software Programs. IEEE Int. Comput. 2021, 7801, 1–8. [Google Scholar] [CrossRef]
- Yamamoto, T.; Hayama, H.; Hayashi, T.; Mori, T. Automatic energy-saving operations system using robotic process automation. Energies 2020, 13, 2342. [Google Scholar] [CrossRef]
- Zuhaira, B.; Ahmad, N.; Saba, T.; Haseeb, J.; Malik, S.U.R.; Manzoor, U.; Balubaid, M.A.; Anjum, A. Identifying Deviations in Software Processes. IEEE Access 2017, 5, 20319–20332. [Google Scholar] [CrossRef]
- Bakker, S.; Haq, G.; Peet, K.; Gota, S.; Medimorec, N.; Yiu, A.; Jennings, G.; Rogers, J. Low-carbon quick wins: Integrating short-term sustainable transport options in climate policy in low-income countries. Sustainability 2019, 11, 4369. [Google Scholar] [CrossRef] [Green Version]
- Solution, R.H.T. Salary Guide—Robert Half Talent Solutions. Available online: https://www.roberthalf.cl/guia-salarial/details/operaciones-jefe-de-operaciones/chile (accessed on 19 April 2022).
- Ortiz, F.C.M.; Costa, C.J. RPA in Finance: Supporting portfolio management: Software robot in a portfolio optimization problem. In Proceedings of the Iberian Conference on Information Systems and Technologies (CISTI), Sevilla, Spain, 24–27 June 2020; pp. 24–27. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Accelerometer | Range (g) | Bandwidth (Hz) | Noise Density (µg/√Hz) | Price | Synchronization | Internet Access |
|---|---|---|---|---|---|---|---|
| [33] | ADXL335 | ±3 g | 50 | 300 | $530 | No | No |
| [38] | STAMP | ±2 g | 50 | 50 | No data | Yes | Yes |
| [31] | LEWIS 1 | ±2 g | 50 | 400 | $73 | No | No |
| [41] | LEWIS 2 | ±2 g | 250 | 300 | $91 | No | No |
| [18] | CHEAP | ±2 g | 42.5 | 162 | 84 € | No | No |
| [43] | SARA | ±2 g | 166.5 | 51 | 140 € | Yes | Yes |
| Technology | Capacity | Advantage | Disadvantage |
|---|---|---|---|
| Desktop Automation | RPA understands the user interface of the application and does not depend on the position of the screen elements for capture and consumption during the process. | Reliable automation independent of screen resolution and size. | Automation option not available for all cases. |
| Web automation | Screen scraping, data extraction, data filling and interaction with elements such as buttons. | Compatibility with languages such as HTML, Flash and Java. | Only accessible directly with the web. Interactions via remote control (for example, VNC) do not allow integration with RPA. |
| Interface Automation | Interaction of RPA such as PDF, Chrome and Firefox. | Recognition of controls in most Graphical User Interface (GUI) as well as OCR (Optical Character Recognition) | There could be controls that RPA is not able to detect, and it is necessary to opt for a less stable technology, such as image recognition. |
| Screen Scraping | Obtaining text from the screens of software. | Compatibility with documents format, such as PDF. | Automation option not available for all cases. |
| Image Automation | Interaction with screenshots of applications running live on a remote controller or virtual machine. | Recognise items in an app’s screenshot (image). | Of all the automation options, this is the least stable, since it depends on the resolution and size of the screen, as well as the relative position of the controls a user interacts with (e.g., a button). |
| Automation of core systems | Interaction with mainframe systems. | Compatibility with T3700, terminals, Java. | Automation option not available for all cases. |
| SAP Automation | Native interaction with SAP ERP. | Compatibility with some SAP functionalities. | Automation option not available for all SAP functionalities. |
| Excel Automation | Native interaction with Excel | Execution of Excel controls natively integrated into RPA applications. Some of these commands operate without having to open Excel. | Automation option not available for all Excel functionalities. |
| Reference | Location | Year | Field of Study | Use of RPA | Applications Automated | RPA Software Used | RPA Sub-Technology Used |
|---|---|---|---|---|---|---|---|
| Saxena et al. [103] | India | 2020 | Integration of RPA with Artificial Intelligence | Integrating software activities in Facial Emotion Recognition training process using Raspberry Pi 3 | Python | Uipath | Python activity pack with Desktop Automation |
| Yamamoto et al. [104] | Japan | 2020 | Civil Engineering | Developing a building automation system (BAS) for energy saving | Excel | Not specified | Image Automation |
| Shah et al. [105] | India | 2021 | Civil Engineering | Integrating software activities for temperature monitoring in a building | FreeCAD Eclipse Ditto OpenFlow SimFlow ParaView | Uipath | Image Automation |
| No | Name | Price | Acceleration Range | Sampling Frequency | Resolution | Sensitivity | |
|---|---|---|---|---|---|---|---|
| € | g | Hz | mg | V/g | |||
| 1 | SARA | 140 | ±2.0 | 333 | 0.92 | 0.625 | Triaxial |
| 2 | IMI 604B31 | 613 | ±50 | 5000 | 0.35 | 0.100 | Triaxial |
| 3 | IMI 607A61 | 324 | ±50 | 10000 | 0.35 | 0.100 | Uniaxial |
| Day 1 (Cumulative Minutes) | Day 2 (Cumulative Minutes) | |
|---|---|---|
| SHM without RPA | 120 | 240 |
| SHM with RPA | 5 | 10 |
| Total savings of required man-hours | 230 (95.8%) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Atencio, E.; Komarizadehasl, S.; Lozano-Galant, J.A.; Aguilera, M. Using RPA for Performance Monitoring of Dynamic SHM Applications. Buildings 2022, 12, 1140. https://doi.org/10.3390/buildings12081140
Atencio E, Komarizadehasl S, Lozano-Galant JA, Aguilera M. Using RPA for Performance Monitoring of Dynamic SHM Applications. Buildings. 2022; 12(8):1140. https://doi.org/10.3390/buildings12081140
Chicago/Turabian StyleAtencio, Edison, Sayedmilad Komarizadehasl, José Antonio Lozano-Galant, and Matías Aguilera. 2022. "Using RPA for Performance Monitoring of Dynamic SHM Applications" Buildings 12, no. 8: 1140. https://doi.org/10.3390/buildings12081140
APA StyleAtencio, E., Komarizadehasl, S., Lozano-Galant, J. A., & Aguilera, M. (2022). Using RPA for Performance Monitoring of Dynamic SHM Applications. Buildings, 12(8), 1140. https://doi.org/10.3390/buildings12081140