Using A Soft Conformable Foot Sensor to Measure Changes in Foot Strike Angle During Running


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Experimental Protocol
2.3. Data Collection
2.4. Data Processing
2.4.1. Data Synchronization
2.4.2. Foot Strike Determination
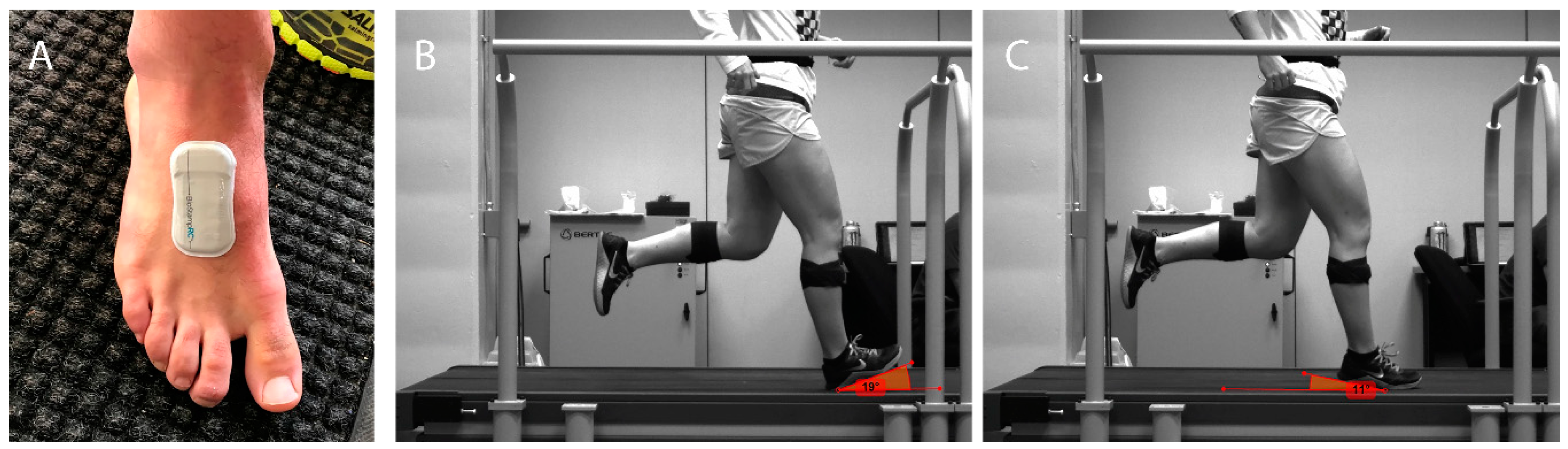
- Video Foot Strike Angle (FSAVIDEO): Using Kinovea software, raters measured the foot angle of each foot strike relative to the treadmill surface. The angle was measured between the top surface of the treadmill belt and the bottom surface of the outsole of the shoe with the vertex at the initial shoe contact point with the treadmill. A positive angle indicated rearfoot and a negative angle indicating forefoot (Figure 1). Final FSAVIDEO was the average across raters.
- Video Foot Strike Classification (FSCVIDEO): Determining an ordinal classification of foot strike pattern based off of Hasegawa et al. (2007) [6], raters were given the following instructions related to whether a footfall was RF, MF, or FF (Figure 1):
- Rearfoot strike (RF)—first foot-ground contact with the heel or rear third part of the sole only. Midfoot or forefoot portion had no contact at foot strike.
- Midfoot strike (MF)—first foot-ground contact with not only the rear third of the sole, but the midfoot or entire part of the sole.
- Forefoot strike (FF)—first foot-ground contact was the forefoot, or front half of the sole, and the heel did not have any contact at foot strike.
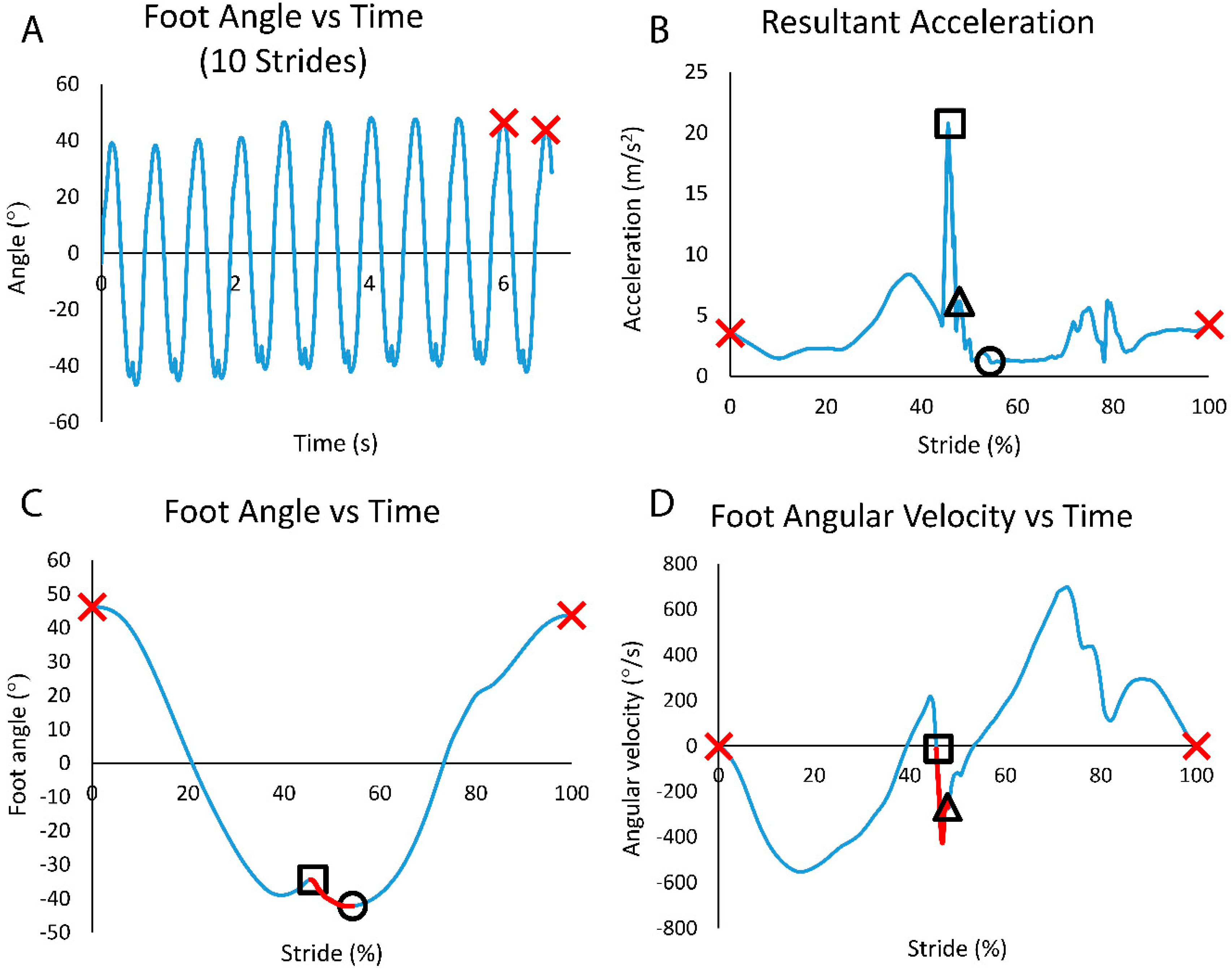
- Sensor Foot Strike Angle (FSASENSOR): After foot strike was determined, the difference in foot angle at foot strike and the angle when the foot was deemed to be stationary on the ground (lowest mean resultant acceleration over a 50 ms interval after foot strike) was used to calculate the change in foot angle (Figure 2C). A more positive angle indicated a more RF strike pattern:FSASENSOR = θSTATIONARY − θFOOTSTRIKE
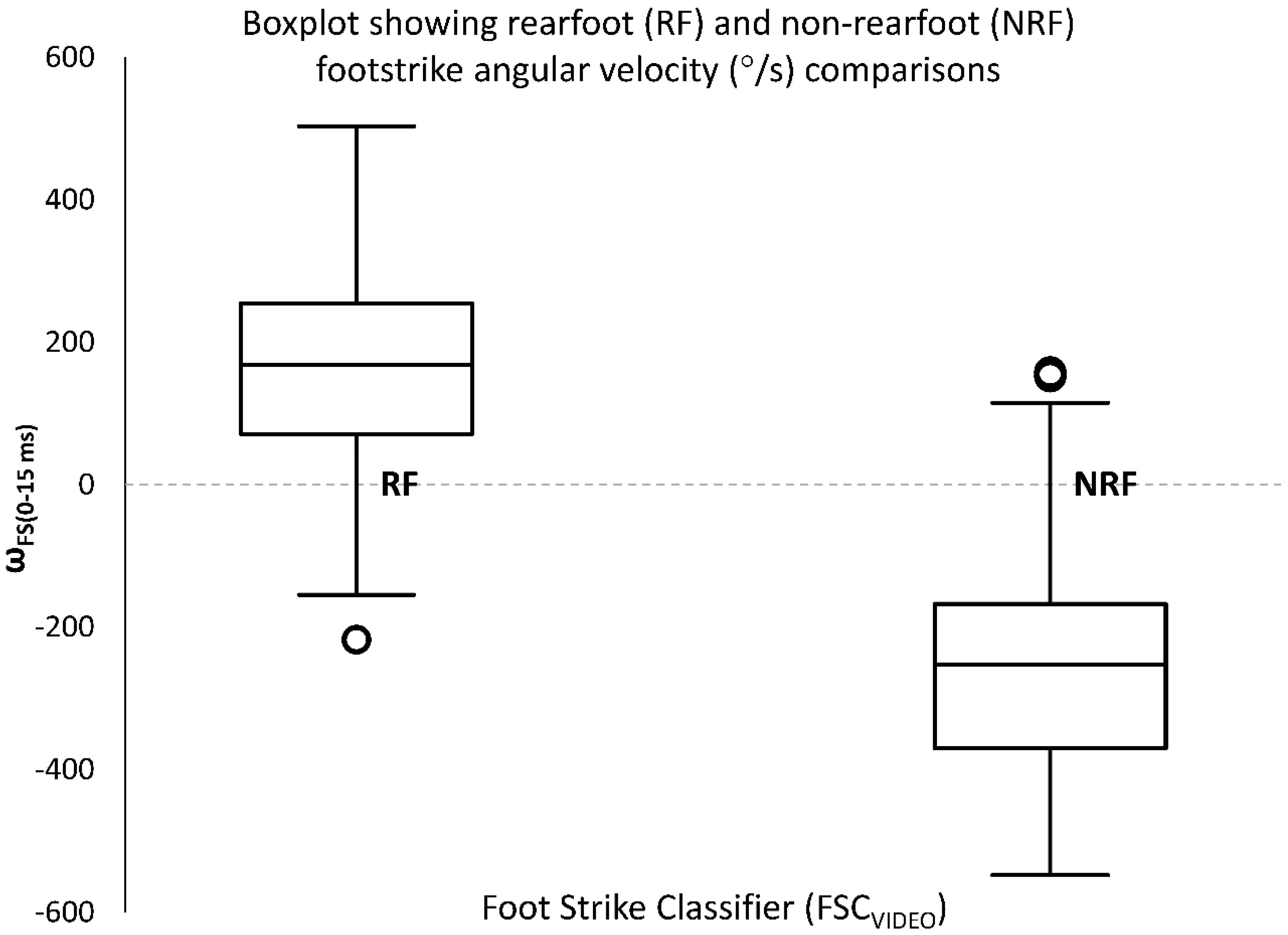
- Sensor Foot Strike Classification (FSCSENSOR): The final rater classification analysis considered only the RF and NRF foot strikes, therefore it was decided to classify FSP using a measure of initial foot strike angular velocity. Sagittal plane gyroscope angular velocity (ωFS) over the first 15 ms after foot strike was averaged to get an indication of the direction of angular rotation directly after foot contact (Figure 2D). It was argued that a positive ωFS would indicate a more RF strike pattern, and that a negative ωFS would indicate a more NRF strike pattern. Therefore, FSCSENSOR is a function of the average angular velocity over the first 15 ms after the initial foot strike:FSCSENSOR = f(ωFS(0–15ms))
2.5. Statistical Analysis
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Adrigo, L.P.; Lafortuna, C.; Minetti, A.E.; Mognoni, P.; Saibene, F. Metabolic and mechanical aspects of foot landing type, forefoot and rearfoot strike, in human running. Acta Physiol. Scand. 1995, 155, 17–22. [Google Scholar]
- Ogueta-Alday, A.; RodríGuez-Marroyo, J.A.; GarcíA-LóPez, J. Rearfoot striking runners are more economical than midfoot strikers. Med. Sci. Sports Exerc. 2014, 46, 580–585. [Google Scholar] [CrossRef] [PubMed]
- Williams, D.S., III; McClay, I.S.; Manal, K.T. Lower extremity mechanics in runners with a converted forefoot strike pattern. J. Appl. Biomech. 2000, 16, 210–218. [Google Scholar] [CrossRef]
- Altman, A.R.; Davis, I.S. A kinematic method for footstrike pattern detection in barefoot and shod runners. Gait Posture 2012, 35, 298–300. [Google Scholar] [CrossRef] [PubMed]
- Cavanagh, P.R.; Lafortune, M.A. Ground reaction forces in distance running. J. Biomech. 1980, 13, 397–406. [Google Scholar] [CrossRef]
- Hasegawa, H.; Yamauchi, T.; Kraemer, W.J. Foot strike patterns of runners at the 15-km point during an elite-level half marathon. J. Strength Cond. Res. 2007, 21, 888–893. [Google Scholar] [PubMed]
- Williams, K.R.; Cavanagh, P.R. Relationship between distance running mechanics, running economy, and performance. J. Appl. Physiol. 1987, 63, 1236–1245. [Google Scholar] [CrossRef] [PubMed]
- Nigg, B.M.; De Boer, R.W.; Fisher, V. A kinematic comparison of overground and treadmill running. Med. Sci. Sports Exerc. 1995, 27, 98–105. [Google Scholar] [CrossRef]
- Bötzel, K.; Marti, F.M.; Rodríguez, M.Á.C.; Plate, A.; Vicente, A.O. Gait recording with inertial sensors—How to determine initial and terminal contact. J. Biomech. 2016, 49, 332–337. [Google Scholar]
- Boutaayamou, M.; Schwartz, C.; Stamatakis, J.; Denoël, V.; Maquet, D.; Forthomme, B.; Croisier, J.-L.; Macq, B.; Verly, J.G.; Garraux, G.; et al. Development and validation of an accelerometer-based method for quantifying gait events. Med. Eng. Phys. 2015, 37, 226–232. [Google Scholar] [CrossRef]
- Giandolini, M.; Poupard, T.; Gimenez, P.; Horvais, N.; Millet, G.Y.; Morin, J.-B.; Samozino, P. A simple field method to identify foot strike pattern during running. J. Biomech. 2014, 47, 1588–1593. [Google Scholar] [CrossRef] [PubMed]
- Laughton, C.A.; Davis, I.M.; Hamill, J. Effect of strike pattern and orthotic intervention on tibial shock during running. J. Appl. Biomech. 2003, 19, 153–168. [Google Scholar] [CrossRef]
- Moon, Y.; McGinnis, R.S.; Seagers, K.; Motl, R.W.; Sheth, N.; Wright, J.A.; Ghaffari, R.; Sosnoff, J.J. Monitoring gait in multiple sclerosis with novel wearable motion sensors. PLoS ONE 2017, 12, e0171346. [Google Scholar] [CrossRef] [PubMed]
- Purcell, B.; Channells, J.; James, D.; Barrett, R. Use of accelerometers for detecting foot-ground contact time during running. In Proceedings of the Microelectronics, MEMS, and Nanotechnology, International Society for Optics and Photonics, Brisbane, Australia, 11 December 2005; p. 603615. [Google Scholar]
- Sinclair, J.; Hobbs, S.J.; Protheroe, L.; Edmundson, C.J.; Greenhalgh, A. Determination of gait events using an externally mounted shank accelerometer. J. Appl. Biomech. 2013, 29, 118–122. [Google Scholar] [CrossRef] [PubMed]
- Shiang, T.-Y.; Hsieh, T.-Y.; Lee, Y.-S.; Wu, C.-C.; Yu, M.-C.; Mei, C.-H.; Tai, I.-H. Determine the foot strike pattern using inertial sensors. J. Sens. 2016, 2016, 1–6. [Google Scholar] [CrossRef]
- Franz, J.; Wierzbinski, C.; Kram, R. Metabolic cost of running barefoot versus shod: Is lighter better? Med. Sci. Sports Exerc. 2012, 44, 1519–1525. [Google Scholar] [CrossRef]
- Larson, P.M.; Higgins, E.; Kaminski, J.; Decker, T.; Preble, J.M.; Lyons, D.; McIntyre, K.P.; Normile, A. Foot strike patterns of recreational and sub-elite runners in a long-distance road race. J. Sports Sci. 2011, 29, 1665–1673. [Google Scholar] [CrossRef]
- Bertelsen, M.L.; Jensen, J.F.; Nielsen, M.H.; Nielsen, R.O.; Rasmussen, S. Footstrike patterns among novice runners wearing a conventional, neutral running shoe. Gait Posture 2013, 38, 354–356. [Google Scholar] [CrossRef]
- Mitschke, C.; Zaumseil, F.; Milani, T.L. The influence of inertial sensor sampling frequency on the accuracy of measurement parameters in rearfoot running. Comput. Methods Biomech. Biomed. Engin. 2017, 20, 1502–1511. [Google Scholar] [CrossRef]
- Youden, W.J. Index for rating diagnostic tests. Cancer 1950, 3, 32–35. [Google Scholar] [CrossRef]
- Schisterman, E.F.; Perkins, N.J.; Liu, A.; Bondell, H. Optimal cut-point and its corresponding Youden Index to discriminate individuals using pooled blood samples. Epidemiol. Camb. Mass 2005, 16, 73–81. [Google Scholar] [CrossRef]
- Koo, T.K.; Li, M.Y. A guideline of selecting and reporting Intraclass Correlation Coefficients for reliability research. J. Chiropr. Med. 2016, 15, 155–163. [Google Scholar] [CrossRef]
- Fleiss, J.L.; Levin, B.; Paik, M.C. Statistical Methods for Rates and Proportions; Wiley Series in Probability and Statistics; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2003; ISBN 978-0-471-52629-2. [Google Scholar]
- Gaudel, J.; Oriwol, D.; Maiwald, C.; Dannemann, A. Classification of foot strike pattern using single accelerometers. Footwear Sci. 2015, 7, S132–S133. [Google Scholar] [CrossRef]
- Falbriard, M.; Meyer, F.; Mariani, B.; Millet, G.P. Contact time and foot strike angles estimation usinf foot worn intertial sesnors in running. In Proceedings of the 35th of the International Society of Biomechanics in Sports, Cologne, Germany, 14–18 June 2017; pp. 504–507. [Google Scholar]
- Mitschke, C.; Kiesewetter, P.; Milani, T.L. The effect of the accelerometer operating range on biomechanical parameters: Stride length, velocity, and peak tibial acceleration during running. Sensors 2018, 18, 130. [Google Scholar] [CrossRef]
- Puig-Diví, A.; Escalona-Marfil, C.; Padullés-Riu, J.M.; Busquets, A.; Padullés-Chando, X.; Marcos-Ruiz, D. Validity and reliability of the Kinovea program in obtaining angles and distances using coordinates in 4 perspectives. PLoS ONE 2019, 14, e0216448. [Google Scholar] [CrossRef]
- Damsted, C.; Nielsen, R.O.; Larsen, L.H. Reliability of video-based quantification of the knee- and hip angle at foot strike during running. Int. J. Sports Phys. Ther. 2015, 10, 147–154. [Google Scholar]
- Maiwald, C.; Dannemann, A.; Gaudel, J.; Oriwol, D. A simple method to detect stride intervals in continuous acceleration and gyroscope data recorded during treadmill running. Footwear Sci. 2015, 7, S143–S144. [Google Scholar] [CrossRef]
- Mitschke, C.; Heß, T.; Milani, T.L. Which method detects foot strike in rearfoot and forefoot runners accurately when using an inertial measurement unit? Appl. Sci. 2017, 7, 959. [Google Scholar] [CrossRef]
- McGinnis, R.S.; Patel, S.; Silva, I.; Mahadevan, N.; DiCristofaro, S.; Jortberg, E.; Ceruolo, M.; Aranyosi, A.J. Skin mounted accelerometer system for measuring knee range of motion. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 17–20 August 2016; pp. 5298–5302. [Google Scholar]




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
van Werkhoven, H.; Farina, K.A.; Langley, M.H. Using A Soft Conformable Foot Sensor to Measure Changes in Foot Strike Angle During Running. Sports 2019, 7, 184. https://doi.org/10.3390/sports7080184
van Werkhoven H, Farina KA, Langley MH. Using A Soft Conformable Foot Sensor to Measure Changes in Foot Strike Angle During Running. Sports. 2019; 7(8):184. https://doi.org/10.3390/sports7080184
Chicago/Turabian Stylevan Werkhoven, Herman, Kathryn A. Farina, and Mark H. Langley. 2019. "Using A Soft Conformable Foot Sensor to Measure Changes in Foot Strike Angle During Running" Sports 7, no. 8: 184. https://doi.org/10.3390/sports7080184
APA Stylevan Werkhoven, H., Farina, K. A., & Langley, M. H. (2019). Using A Soft Conformable Foot Sensor to Measure Changes in Foot Strike Angle During Running. Sports, 7(8), 184. https://doi.org/10.3390/sports7080184