The Effect of a Curved Non-Motorized Treadmill on Running Gait Length, Imbalance and Stride Angle


Abstract
1. Introduction
2. Methods
2.1. Participants
2.2. Procedures
2.3. Gait Variables
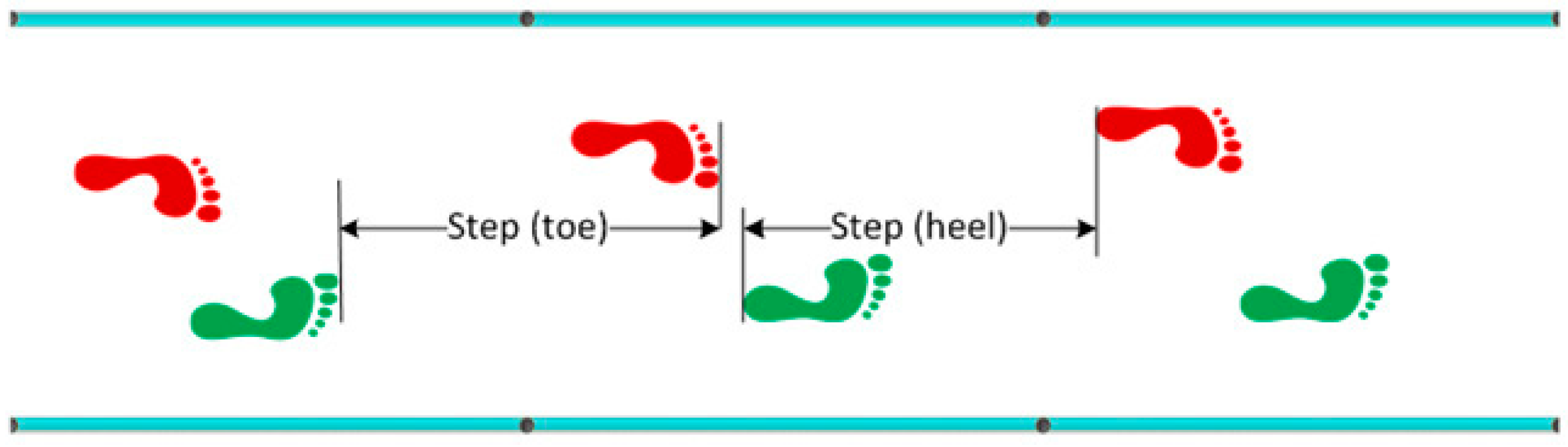
- Step length is the distance between the tip (toe) of two subsequent feet or the distance between the heel of two subsequent feet (measured in meters) (Figure 1).
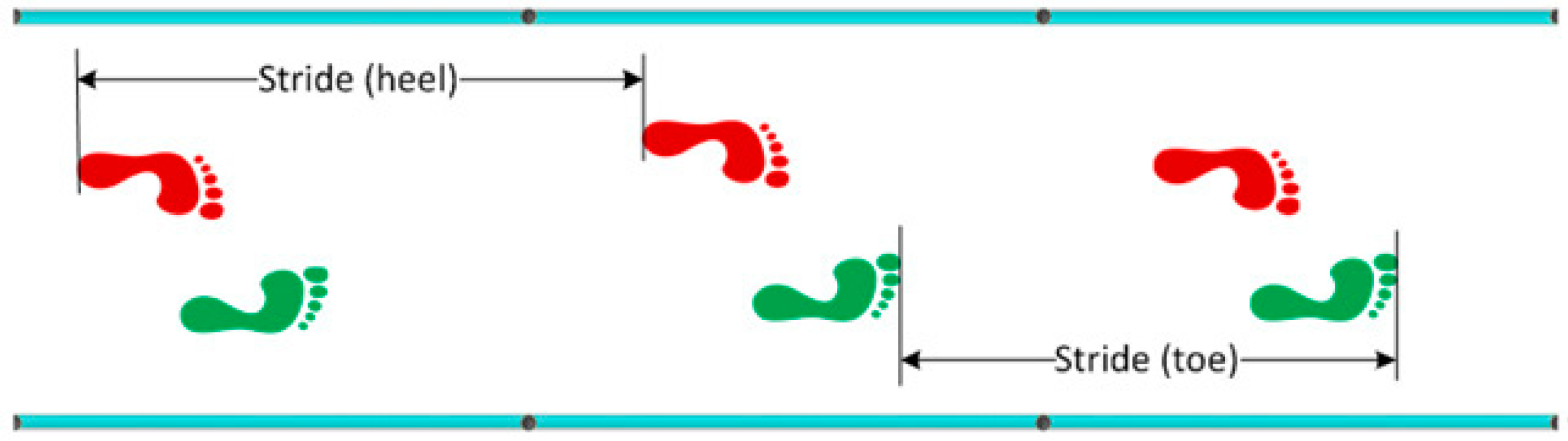
- Stride length is defined as the distance between the tip of two subsequent footprints of the same foot or the distance between the heel of two subsequent footprints of the same foot (measured in meters) (Figure 2).
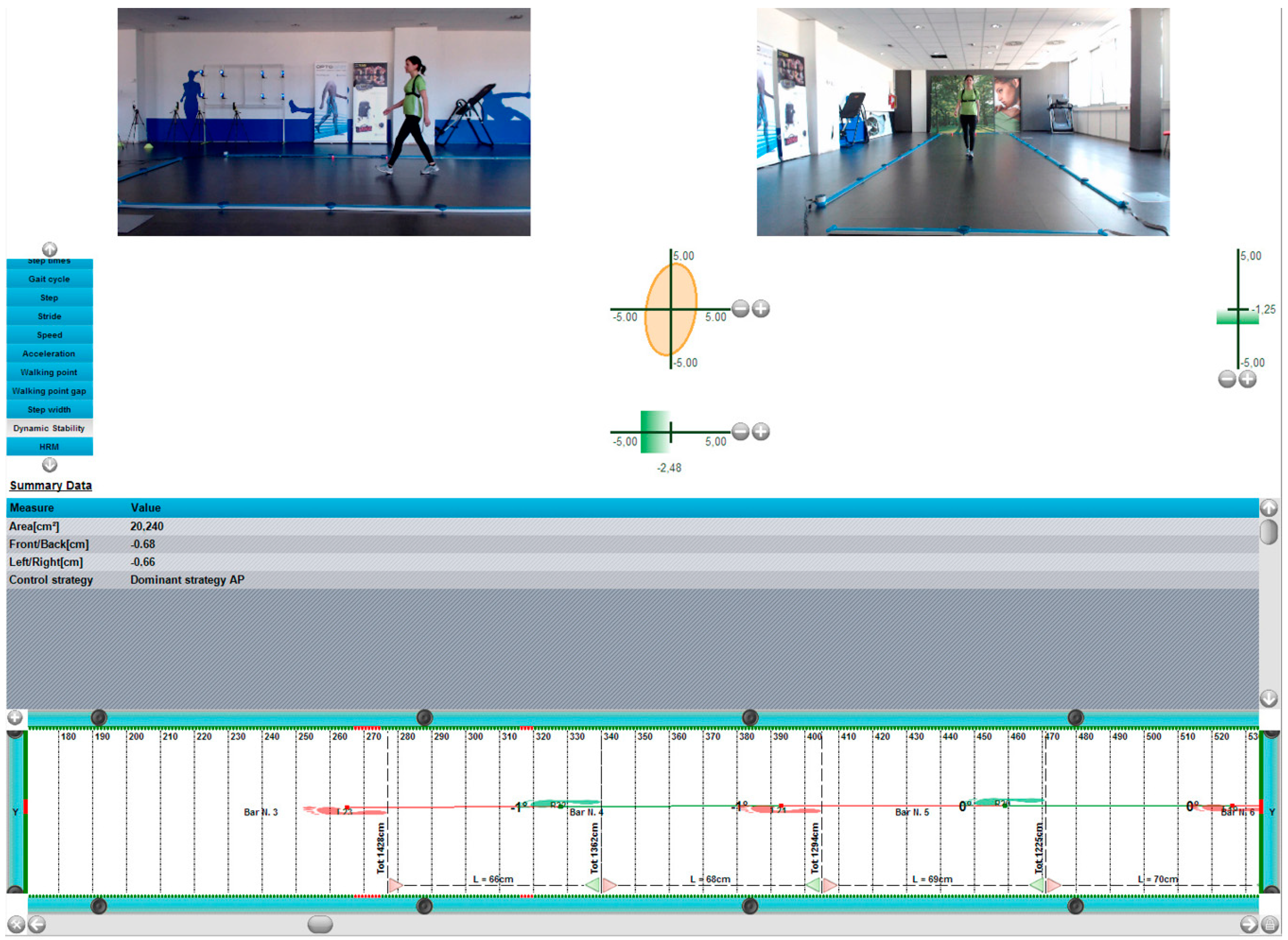
- Imbalance is an indicator of running ‘asymmetry’ between the right and the left legs. The difference between the ideal and real time, and the relation between the difference and the ideal time (expressed as a %), can be defined as imbalance (measured in degrees) (Figure 3).
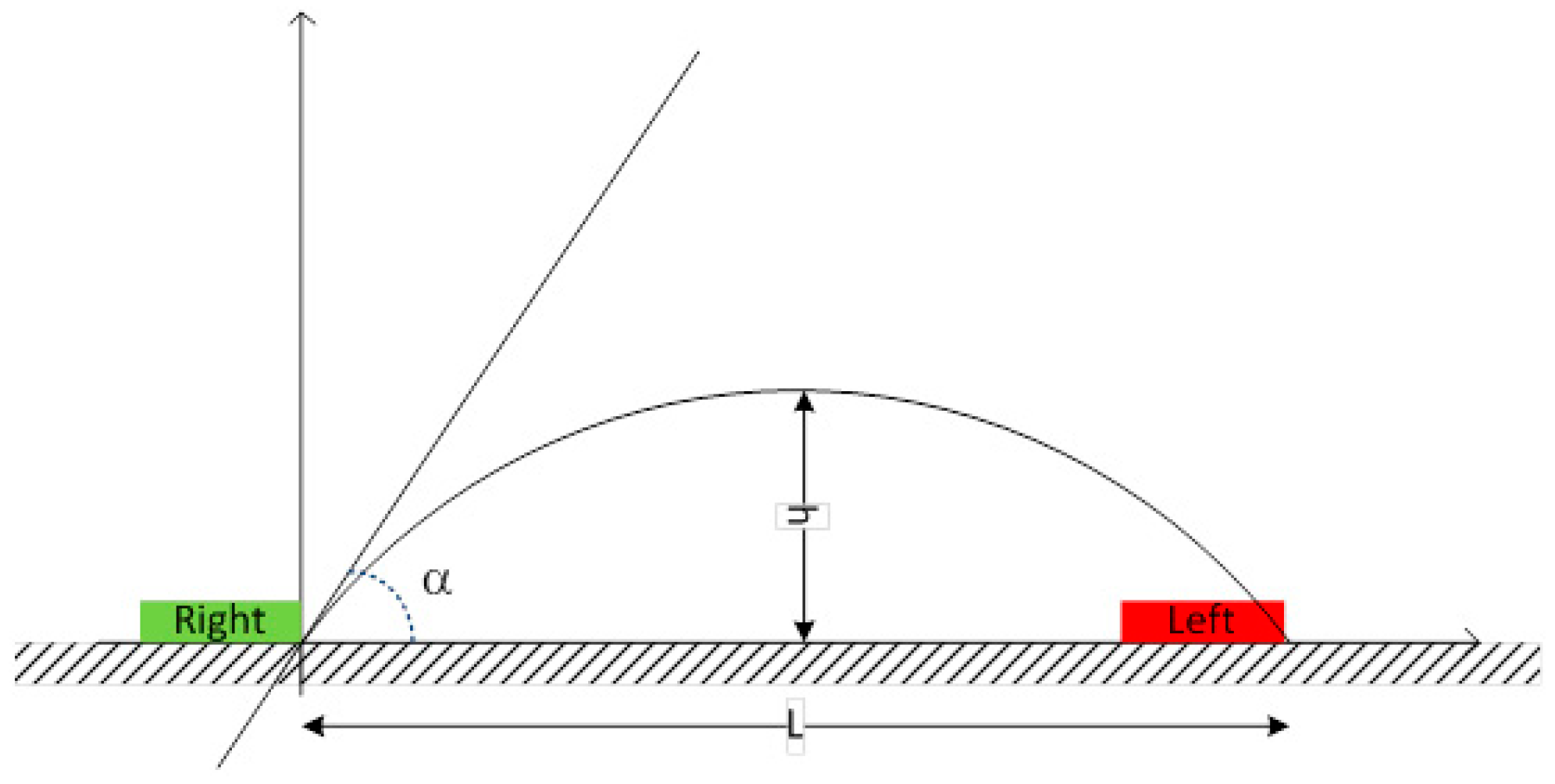
- Stride angle is defined as the angle of the parable tangent derived from the movement of a stride (L = stride length, h = height to which the foot is risen) (measured in degrees) (Figure 4).
2.4. Instrumentation
2.5. Statistical Analysis
3. Results
3.1. Physical Characteristics
3.2. Gait Performance Variables
3.3. Statistical Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- United States Running Event Finishers 1990–2015. Running USA, 2016. Available online: http://www.runningusa.org/statistics (accessed on 12 May 2018).
- Bramble, D.M.; Lieberman, D.E. Endurance running and the evolution of Homo. Nature 2004, 432, 345–352. [Google Scholar] [CrossRef] [PubMed]
- Franklin, S.; Grey, M.; Heneghan, N.; Bowen, L.; Li, F.X. Barefoot vs common footwear: A systematic review of the kinematic, kinetic and muscle activity differences during walking. Gait Posture 2015, 42, 230–239. [Google Scholar] [CrossRef] [PubMed]
- Theodore, D. Anatomy of the Moving Body: A Basic Course in Bones, Muscles, and Joints, 2nd ed.; North Atlantic Books: Berkeley, CA, USA, 2015. [Google Scholar]
- McKeon, P.; Hertel, J.; Bramble, D.; Davis, I. The foot core system: A new paradigm for understanding intrinsic foot muscle function. Br. J. Sports Med. 2015, 49, 290. [Google Scholar] [CrossRef] [PubMed]
- Altman, A.R.; Davis, I.S. Barefoot Running: Biomechanics and Implications for Running Injuries. Curr. Sports Med. Rep. 2015, 11, 244–250. [Google Scholar] [CrossRef] [PubMed]
- Van Gent, R.N.; Siem, D.; van Middelkoop, M.; van Os, A.G.; Bierma-Zeinstra, S.M.A.; Koes, B.W. Incidence and determinants of lower extremity running injuries in long distance runners: A systematic review. Br. J. Sports Med. 2007, 4, 469–480. [Google Scholar] [CrossRef] [PubMed]
- Hamill, J.; Russell, E.M.; Gruber, A.H.; Miller, R. Impact characteristics in shod and barefoot running. Footwear Sci. 2011, 3, 33–40. [Google Scholar] [CrossRef]
- Norton, N. Comparing Caloric Expenditure and Rate of Perceived Exertion between the Curve and a Motorized Treadmill. Master’s Thesis, Eastern Washington University, Cheney, WA, USA, 2014. [Google Scholar]
- Lee, S.; DeWitt, J.K.; Smith, C.; Hagan, R.D.; Laughlin, M.S.; Lober, J.A.; Nocross, J. Physiologic Responses and Biomechanical Aspects of Motorized and Nonmotorized Treadmill Exercise: A Ground-Based Evaluation of Treadmills for Use on the International Space Station; NASA Technical Paper, NASA/TP2006213734; National Aeronautics and Space Administration: Washington, DC, USA, 2008. [Google Scholar]
- Ardigò, L.P.; Lafortuna, C.; Minetti, A.E.; Mognoni, P.; Saibene, F. Metabolic and mechanical aspects of foot landing type, forefoot and rearfoot strike, in human running. Acta Physiol. Scand. 1995, 155, 17–22. [Google Scholar] [CrossRef] [PubMed]
- Ogueta-Alday, A.; Rodríguez-Marroyo, J.A.; García-López, J. Rearfoot striking runners are more economical than midfoot strikers. Med. Sci. Sports Exerc. 2014, 46, 580–585. [Google Scholar] [CrossRef] [PubMed]
- Perl, D.P.; Daoud, A.I.; Lieberman, D.E. Effects of footwear and strike type on running economy. Med. Sci. Sports Exerc. 2012, 44, 1335–1343. [Google Scholar] [CrossRef] [PubMed]
- Crowell, H.P.; Davis, I.S. Gait Retraining to Reduce Lower Extremity Loading in Runners. Clin. Biomech. 2011, 26, 78–83. [Google Scholar] [CrossRef] [PubMed]
- Davis, I.S.; Futrell, E. Gait Retraining: Altering the Fingerprint of Gait. Phys. Med. Rehabil. Clin. N. Am. 2016, 27, 339–355. [Google Scholar] [CrossRef] [PubMed]
- Wannstedt, G.T.; Herman, R.M. Use of augmented sensory feedback to achieve symmetrical standing. Phys. Ther. 1978, 58, 553–559. [Google Scholar] [CrossRef] [PubMed]
- Seeger, B.R.; Caudrey, D.J. Biofeedback therapy to achieve symmetrical gait in children with hemiplegic cerebral palsy: Long-term efficacy. Arch. Phys. Med. Rehabil. 1983, 64, 160–162. [Google Scholar] [PubMed]
- Seeger, B.R.; Caudrey, D.J.; Scholes, J.R. Biofeedback therapy to achieve symmetrical gait in hemiplegic cerebral palsied children. Arch. Phys. Med. Rehabil. 1981, 62, 364–368. [Google Scholar] [PubMed]
- Lienhard, K.; Schneider, D.; Maffiuletti, N. Validity of the Optogait Photoelectric system for the assessment of spatiotemporal gait parameters. Med. Eng. Phys. 2013, 35, 500–504. [Google Scholar] [CrossRef] [PubMed]
- Lesinski, M.; Muehlbauer, T.; Granacher, U. Concurrent validity of the Gyko inertial sensor system for the assessment of vertical jump height in female sub-elite youth soccer players. BMC Sports Sci. Med. Rehabil. 2016, 8, 35. [Google Scholar] [CrossRef] [PubMed]
- Novacheck, T.F. Review paper: The biomechanics of running. Gait Posture 1998, 7, 77–95. [Google Scholar] [CrossRef]
- Kerr, B.A.; Beauchamp, L.; Fisher, V.; Neil, R. Footstrike Patterns in Distance Running. In Biomechanical Aspects of Sport Shoes and Playing Surfaces; Nigg, B.M., Kerr, B.A., Eds.; University Printing: Calgary, Canada, 1983; pp. 135–142. [Google Scholar]
- Mercer, J.A.; Vance, J.; Hreljac, A.; Hamill, J. Relationship between shock attenuation and stride length during running at different velocities. Eur. J. Appl. Physiol. 2002, 87, 403–408. [Google Scholar]
- Mercer, J.A.; Bezodis, N.E.; Russell, M.; Purdy, A.; DeLion, D. Kinetic consequences of constraining running behavior. J. Sports Sci. Med. 2005, 4, 144–152. [Google Scholar] [PubMed]
- Mercer, J.A.; DeVita, P.; Derrick, T.R.; Bates, B.T. The individual effects of stride length and stride frequency changes on shock attenuation during running. Med. Sci. Sports Exerc. 2003, 35, 307–313. [Google Scholar] [CrossRef] [PubMed]
- Thompson, M.; Lee, S.; Seegmiller, J.; McGowan, C.P. Kinematic and kinetic comparison of barefoot and shod running in mid/forefoot and rearfoot strike runners. Gait Posture 2015, 41, 957–959. [Google Scholar] [CrossRef] [PubMed]
- Hall, J.P.; Barton, C.; Jones, P.R.; Morrissey, D. The biomechanical differences between barefoot and shod distance running: A systematic review and preliminary meta-analysis. Sports Med. 2013, 43, 1335–1353. [Google Scholar] [CrossRef] [PubMed]
- Heiderscheit, B.C.; Chumanov, E.S.; Michalski, M.P.; Wille, C.M.; Ryan, M.B. Effects of step rate manipulation on joint mechanics during running. Med. Sci. Sports Exerc. 2011, 43, 296–302. [Google Scholar] [CrossRef] [PubMed]
- Squadrone, R.; Gallozzi, C. Biomechanical and physiological comparison of barefoot and two shod conditions in experienced barefoot runners. J. Sports Med. Phys. Fit. 2009, 49, 6–13. [Google Scholar]
- Cavanagh, P.R.; Lafortune, M.A. Ground reaction forces in distance running. J. Biomech. 1980, 13, 397–406. [Google Scholar] [CrossRef]
- Schubert, A.G.; Kempf, J.; Heiderscheit, B.C. Influence of Stride Frequency and Length on Running Mechanics: A Systematic Review. Sports Health 2014, 6, 210–217. [Google Scholar] [CrossRef] [PubMed]
- The Effect of Asymmetry on Running Performance and Injury Prevention. Competitor Running, 2016. Available online: http://running.competitor.com/2016/01/injury-prevention/symmetry-and-running_144007#f44klTSzv0XmbYTx.99 (accessed on 14 May 2018).
- Nasirzade, A.; Sadeghi, H.; Mokhtarinia, H.R.; Rahimi, A. A Review of Selected Factors Affecting Gait Symmetry. Phys. Treat. 2017, 7, 3–12. [Google Scholar] [CrossRef]
- Goble, D.; Marino, G.; Potvin, J. The influence of horizontal velocity on interlimb symmetry in normal walking. Hum. Mov. Sci. 2003, 22, 271–283. [Google Scholar] [CrossRef]
- Santos-Concejero, J.; Granados, C.; Irazusta, J.; Bidaurrazaga-Letona, I.; Zabala-Lili, J.; Tam, N.; Gil, S.M. Differences in ground contact time explain the less efficient running economy in North African runners. Biol. Sport 2014, 30, 181–187. [Google Scholar] [CrossRef] [PubMed]
- Santos-Concejero, J.; Tam, N.; Granados, C.; Irazusta, J.; Bidaurrazaga-Letona, I.; Zabala-Lili, J.; Gil, S.M. Interaction effects of stride angle and strike pattern on running economy. Int. J. Sports Med. 2014, 35, 1118–1123. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Pooled (N = 16) | Female (n = 10) | Male (n = 6) |
|---|---|---|---|
| Age (y) | 20.46 ± 1.69 | 20.06 ± 1.78 | 21.01 ± 1.67 |
| Height (cm) | 172.33 ± 7.17 | 167.28 ± 5.17 | 178.22 ± 3.74 |
| Body Mass (kg) | 69.08 ± 11.14 | 64.93 ± 9.38 | 75.99 ± 11.05 |
| Variable | TMT-1 | TMT-2 | TMT-3 |
|---|---|---|---|
| Step length (m) | 0.86 ± 0.08 | 0.75 ± 0.11 | 0.68 ± 0.08 |
| Stride length (m) | 1.89 ± 0.55 | 1.65 ± 0.19 | 1.52 ± 0.14 |
| Imbalance (°) | −1.37 ± 2.65 | −0.36 ± 2.13 | −1.13 ± 1.75 |
| Stride angle (°) | 3.55 ± 4.39 | 1.23 ± 0.83 | 0.47 ± 0.17 |
| Variable | TMT-1 vs. TMT-2 | TMT-1 vs. TMT-3 |
|---|---|---|
| Step length (m) | p = 0.039 * | p = 0.026 * |
| Stride length (m) | p = 0.033 * | p = 0.042 * |
| Imbalance (°) | p = 0.001 * | p = 0.007 * |
| Stride angle (°) | p = 0.001 * | p = 0.001 * |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hatchett, A.; Armstrong, K.; Parr, B.; Crews, M.; Tant, C. The Effect of a Curved Non-Motorized Treadmill on Running Gait Length, Imbalance and Stride Angle. Sports 2018, 6, 58. https://doi.org/10.3390/sports6030058
Hatchett A, Armstrong K, Parr B, Crews M, Tant C. The Effect of a Curved Non-Motorized Treadmill on Running Gait Length, Imbalance and Stride Angle. Sports. 2018; 6(3):58. https://doi.org/10.3390/sports6030058
Chicago/Turabian StyleHatchett, Andrew, Kaitlyn Armstrong, Brian Parr, Mallory Crews, and Charlie Tant. 2018. "The Effect of a Curved Non-Motorized Treadmill on Running Gait Length, Imbalance and Stride Angle" Sports 6, no. 3: 58. https://doi.org/10.3390/sports6030058
APA StyleHatchett, A., Armstrong, K., Parr, B., Crews, M., & Tant, C. (2018). The Effect of a Curved Non-Motorized Treadmill on Running Gait Length, Imbalance and Stride Angle. Sports, 6(3), 58. https://doi.org/10.3390/sports6030058