1. Introduction
Thermoplastic polymers are increasingly used to replace other materials in tribologically loaded components, e.g., in the automotive industry or in mechanical engineering. This development is largely driven by the need to reduce weight in order to obtain more energy efficient products. A profound understanding of the friction and wear mechanisms is a prerequisite for developing reliable tribological systems. While the interaction between polymer and steel already has been studied in detail for non-lubricated tribological systems, only limited information is available on lubricated tribological systems. Polymer transfer [
1] or “temperature hot spots” of the polymer during frictional loading in lubricated systems indicate that the interaction between polymer and its frictional partner for lubricated contacts is complex and includes adhesive interactions. However, in tribological tests in the mixed lubrication regime, the analysis of these effects is often hindered by thermal or mechanical processes (e.g., the “ploughing” of a rough surface through the polymer).
In contrast to the mixed lubrication and the hydrodynamic lubrication regime, the tribology at very low velocities is dominated by the physicochemical interactions [
2] between the polymer surface, lubricant, and the surface of the steel counter-body. Measurements of the tribological behavior of lubricated systems in the static and boundary friction regimes might therefore serve as a method by which one can obtain some insight into the interactions between the polymer, lubricant, and steel frictional partner. The chemical characteristics of the lubricant will influence the wetting behavior of the polymer and steel surface and its tendency to migrate into and partially solve the polymer surface. As a result, the interaction between the lubricant and polymer will alter the adhesive and plastic behavior of the polymer, which in turn will ultimately influence the friction and wear characteristics of the entire system over a wide range of sliding velocities.
An understanding of the influence of the lubricant on the tribology near the transition between static friction and the boundary lubrication regime using “rate-and-state” models can furthermore help to explain the performance of the lubricant at local asperity contacts with higher velocities in the mixed lubrication regime. In addition, tribological experiments at very low velocities are not only interesting from a fundamental perspective; they are also relevant for a variety of technical problems, such as the analysis of initial breakaway torques or the emission of noise due to stick-slip phenomena at low gliding speeds.
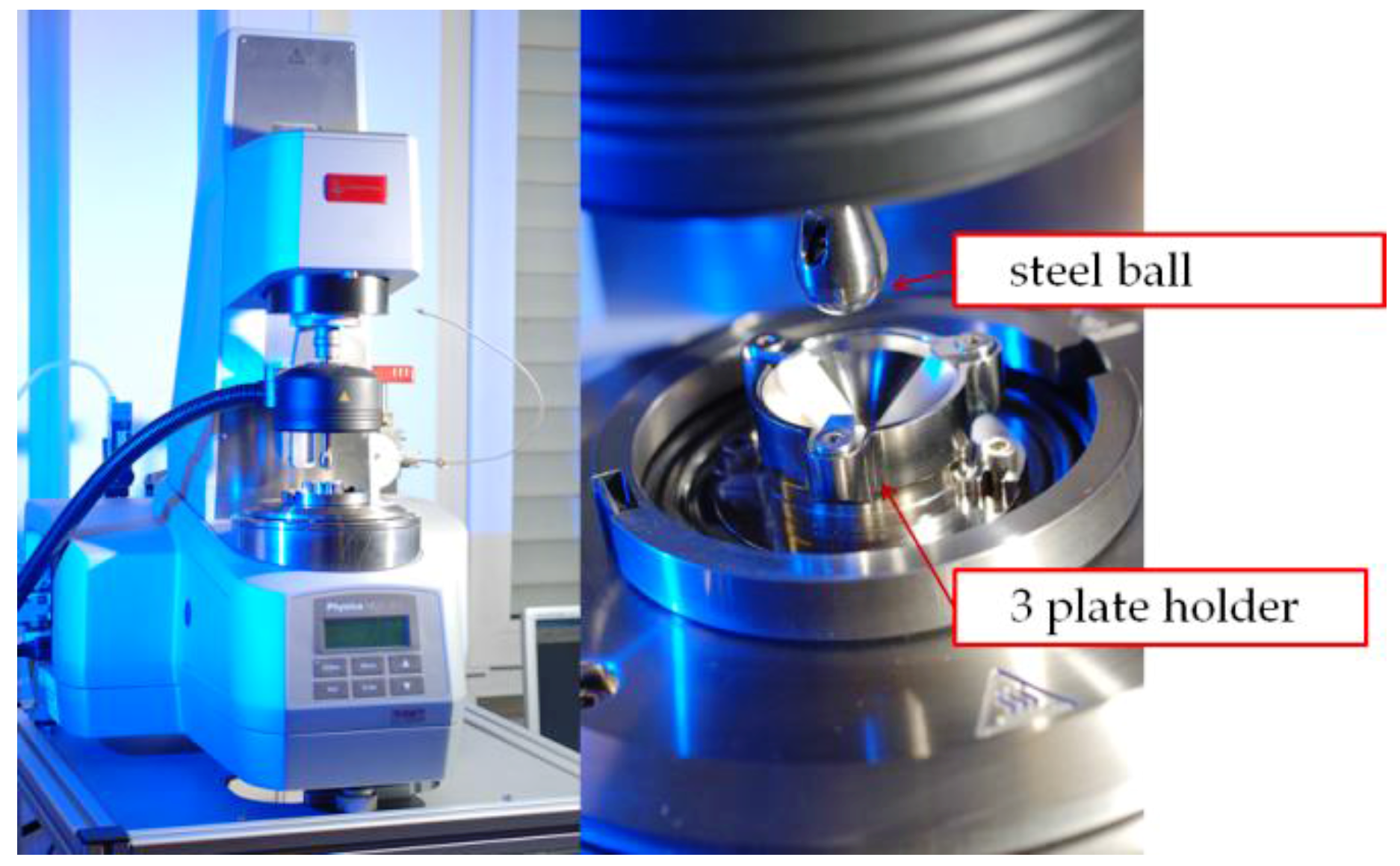
The current study aims to investigate the relationship between tribological phenomena and the surface and interfacial energies of the tribological partners. The latter can be used to understand adhesion and wetting phenomena observed for the lubricants and frictional partners. The tribology of the lubricated polymer-steel-system was investigated with a tribometer which can be used in an “oscillatory” mode to capture the transition between static friction and dynamic friction, and in a conventional mode to record a Stribeck curve of the lubricated system over a wide range of gliding velocities. The study was carried out with a poly(ether ether ketone) (PEEK)-steel tribosystem which was lubricated with two different ester-based lubricants.
2. Scientific Background
The friction of polymers on smooth surfaces is caused by a continuous forming and breaking of adhesive junctions between the two sliding partners. Schallamach [
3] described the adhesive friction as a thermally driven rate process best described by a modified Arrhenius equation.
f denotes the rate of bonding and debonding or the “slip-rate”;
f0 indicates the reference frequency,
E represents the activation energy for rearranging polymer chains to form a bond,
W means the work required to break the interfacial contact, and Ω∑ denotes the work done by the applied stress ∑ on the activated volume Ω. Finally,
kB is the Boltzmann constant and
T is the absolute temperature:
With Schallamach’s approach, the temperature and velocity dependence of the coefficient of friction (COF) µ of a polymer gliding on a smooth surface can be explained. The model predicts a monotonous increasing COF with increasing sliding velocity v until a maximum value is reached. With further increasing v, the COF decreases. Experiments frequently showed that Schallamach’s model and refined versions of the model are able to describe the tribology of polymers.
In the range of static friction and very low sliding speeds
v, additional effects can be detected which result in a development of the COF µ(
v) differing from the behavior described above. In particular, an initial decrease of the COF leading to a minimum value followed by an increasing COF can be observed. In this velocity range, the tribology cannot solely be described by a thermally driven rate process; the development of the state of the contact area
φ (i.e., the “aging” of the contact area) has to be taken into account for describing the tribology of the system. Dieterich [
4] and Ruina [
5] formulated general “rate-and-state” friction laws in order to describe the COF µ as a function of the slip velocity
v and the state
φ, where
V* denotes a typical sliding velocity which results in the COF µ* and
L is a characteristic slip distance. Putelat et al. [
6] provided a study on the microphysical foundations of the rate-and-state friction.
Schallamach’s approach is based on an energy-based description of the adhesive processes between the frictional partners. An analysis of the surface and interfacial energies of the frictional partners can give some insight into the influence of the lubricant on the adhesive friction between the polymer and the steel frictional partner. The interactions between the polymer, the lubricant, and the steel counter-body are van-der-Waals interactions which consist of the dispersive London interactions between non-polar molecules and polar interactions arising from dipoles or hydrogen bonds.
The surface and interfacial energies are described in terms of the work of adhesion Wad. The work of adhesion is defined as the amount of free energy required to break the contact interface and separate two surfaces or media to infinity in vacuum. The surface free energy γ corresponds to the free energy change which is associated with increasing the surface area of a medium of a solid by a unit area.
According to Bhushan [
7], the free surface energy affects the adhesion between the mating partners: the higher the free surface energy, the stronger are the adhesive forces between the mating surfaces and the higher is the work of adhesion which is required to separate the two surfaces.
In the context of this work, the indexing convention according to Israelachvili [
8] will be used. That is, index 1 refers to the polymer, index 2 refers to the steel counter-body, and index 3 refers to the lubricating fluid. The work of cohesion
Wii of the frictional partners is related to their surface free energy. For the interfacial energy γ
13 between the polymer and lubricant, the Dupré equation holds, where
W13 denotes the work of adhesion:
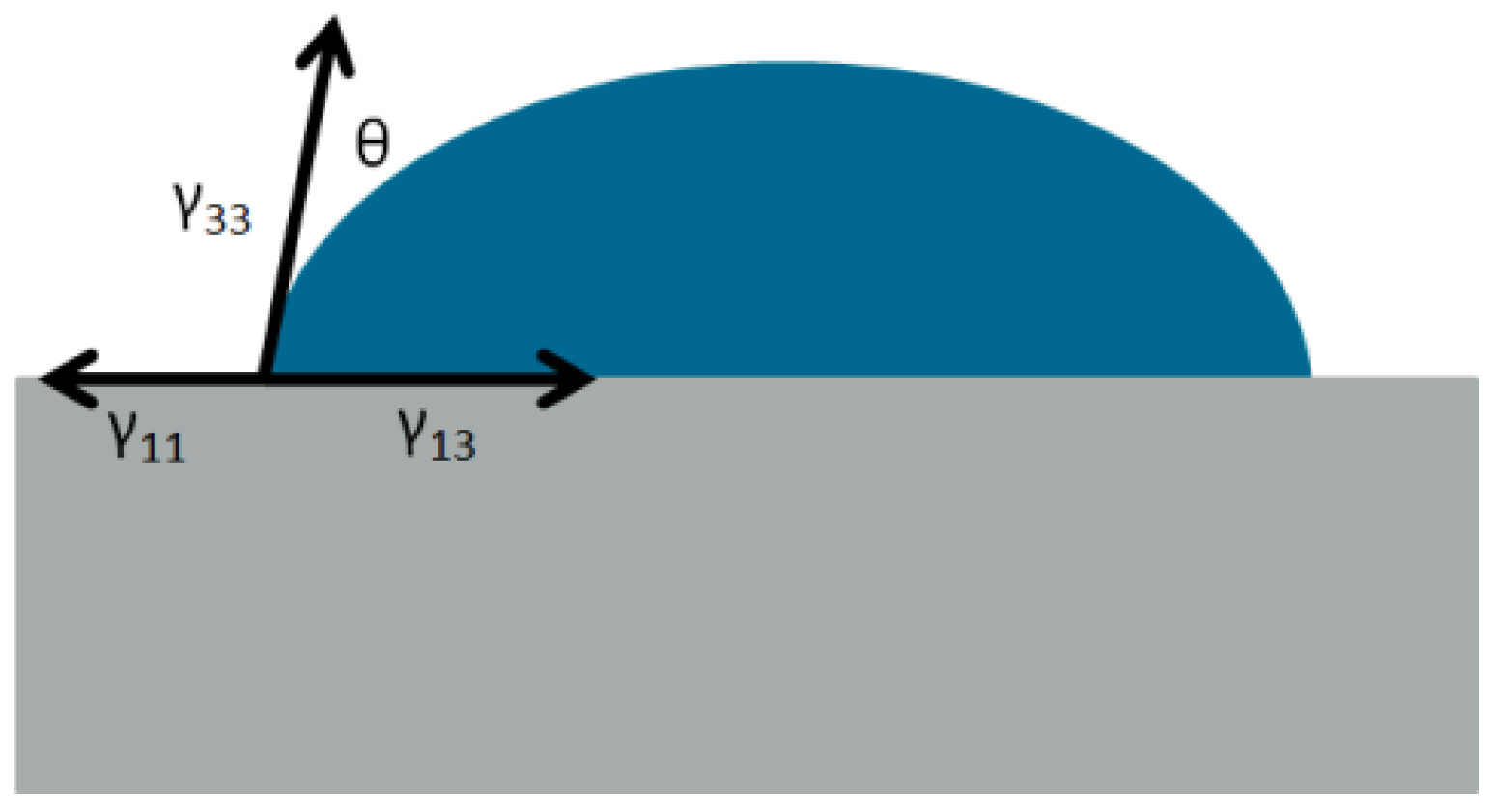
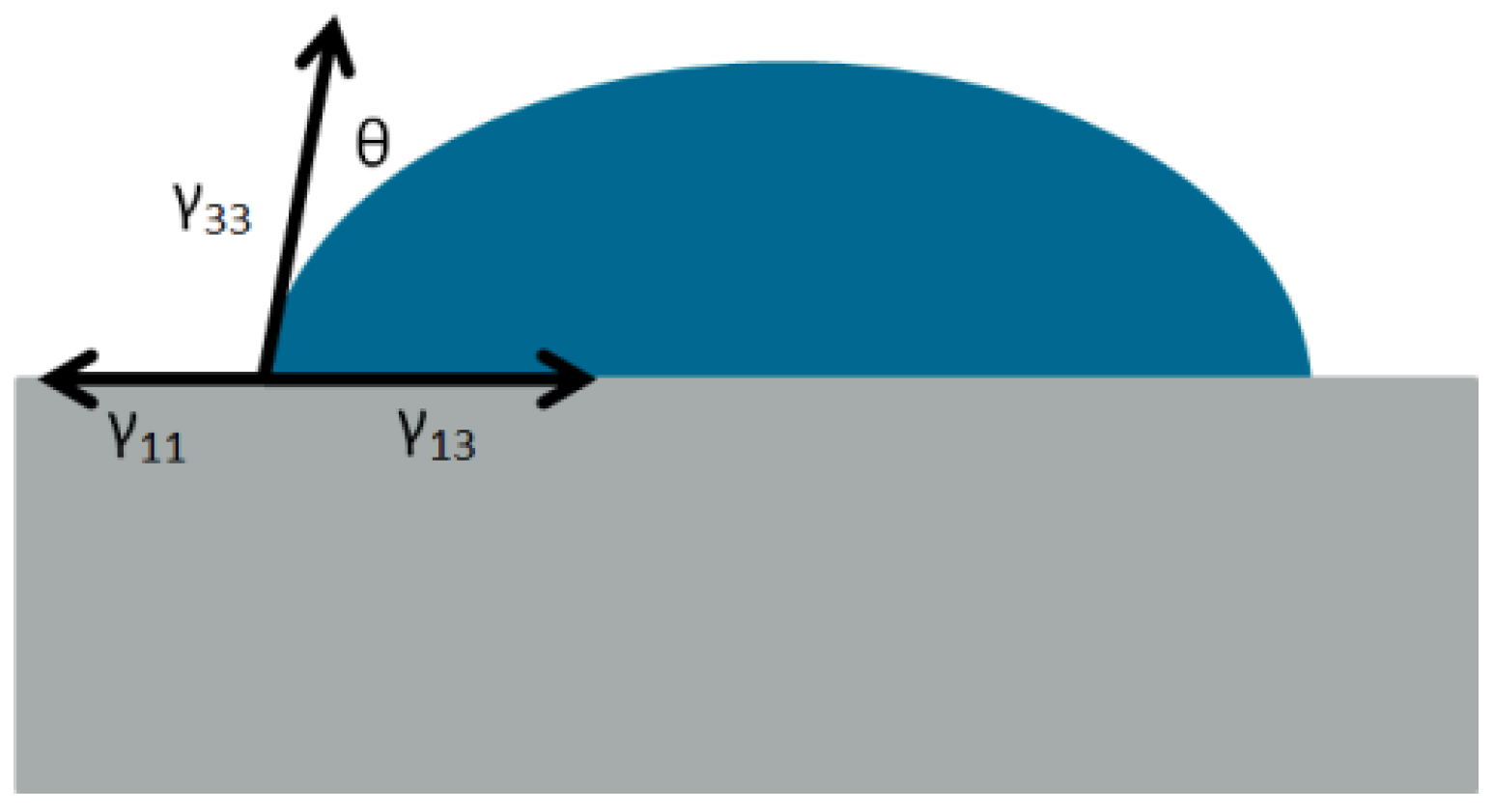
The surface free energies γ and—as a result—the work of adhesion or work of cohesion
W can be determined experimentally by contact angle measurements. When a droplet of a lubricant is placed on a solid body, the droplet forms a contact angle with the solid continuum (see
Figure 1), unless it spreads and completely wets the surface.
The surface free energy or the work of adhesion can be calculated using the Young-Dupré equation:
or the Young equation:
The theory of Owens et al. [
9] provides an additional approach to calculate the work of adhesion. This theory separates the different interactions between two surfaces into two different groups: the polar component γ
p and dispersive component γ
d. The polar component includes the acid-base, London, hydrogen bonding, and induction interactions; the dispersive component corresponds to the dispersion interaction. If it is assumed that only polar-polar and dispersive-dispersive interactions can occur, the work of adhesion between the polymer and the lubricant can be calculated with the geometric means:
The equations above can be used to determine the work of adhesion or one specific surface free energy based on the contact angle and the other surface free energies. Since not all surface free energies which are required are readily available, a range of measurements was carried out which included also fluids and solids with known free surface energies. The required data were obtained by treating the unknown quantities as adjustable parameters and simultaneously varying these parameters to find an optimal solution of a system of equations derived from Equations (5)–(7).
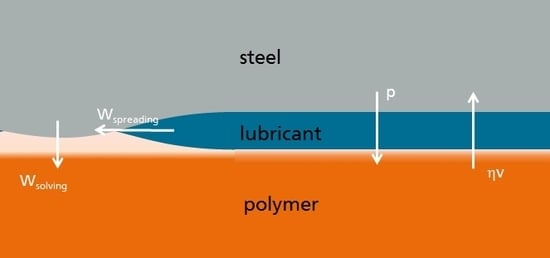
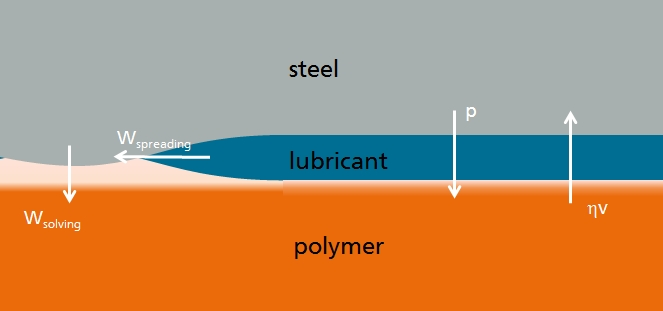
The surface free energy, the work of adhesion, and the work of cohesion of the tribological partners can be used to gain some insight into the energy terms of Equation (1). The work
W required breaking the contact between the polymer and steel corresponds to the work-of-spreading
Wspreading (mN/m) which defines the natural tendency of the lubricant to wet and spread on the solid surface. A negative value of the work-of-spreading indicates that the lubricating fluid can spontaneously invade and break the interface between the tribological partners. The work-of-spreading can be calculated from the work of adhesion
W12 which is required to separate two solid surfaces in contact, the work of cohesion (i.e., the surface free energy) which is required to generate a “free” surface of the lubricating medium
W33, and the interfacial energies
W13 and
W23 which result from the creation of new interfaces between the solid surfaces and the lubricant.
The interfacial energy γ
13 of the polymer and the lubricant corresponds to the energy which is required to increase the interfacial area by a unit area. The tendency of the lubricating fluid to “solve” and mobilize the surface chains and thus increase the interfacial area therefore relates to γ
13, which can be interpreted in this context as an experimental estimated work-of-solving
Wsolving for an intermigrative lubricated surface contact. Its absolute value can be higher than that for the interfacial energy that was obtained by indirect calculation using several nonmigrative lubricated contacts (e.g., of the lubricant with glass, steel, and ceramics). The ratio
Wsolving/γ
13 is therefore referred to in the literature as an “interaction parameter”.
A lubricant which tends to mobilize surface chains will increase the energy E which is gained after the formation of an increased number of adhesive bonds per real contact area. In addition, the higher mobility of the polymer surface layer will result in a larger effective contact area between the polymer and steel surface.
5. Discussion
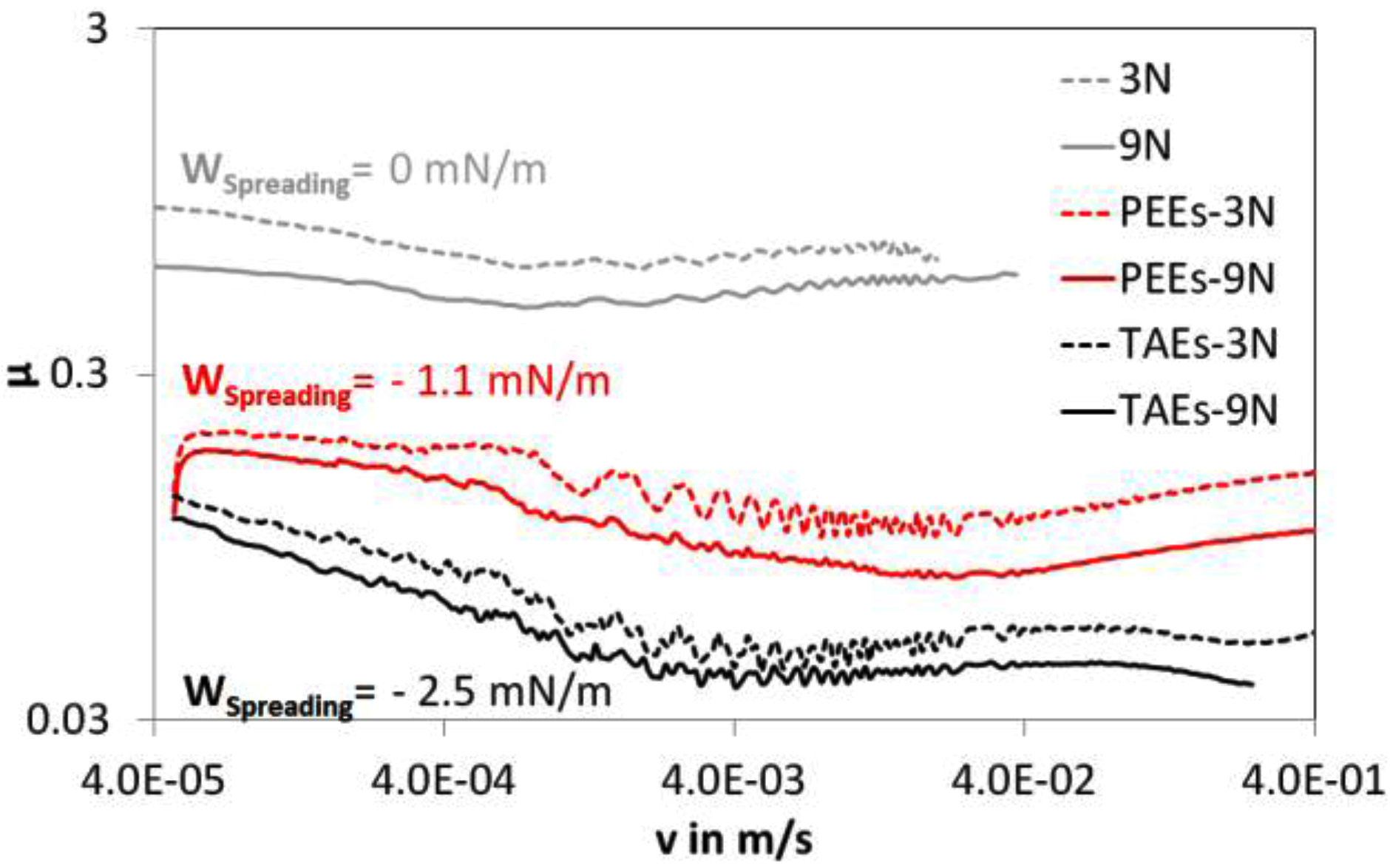
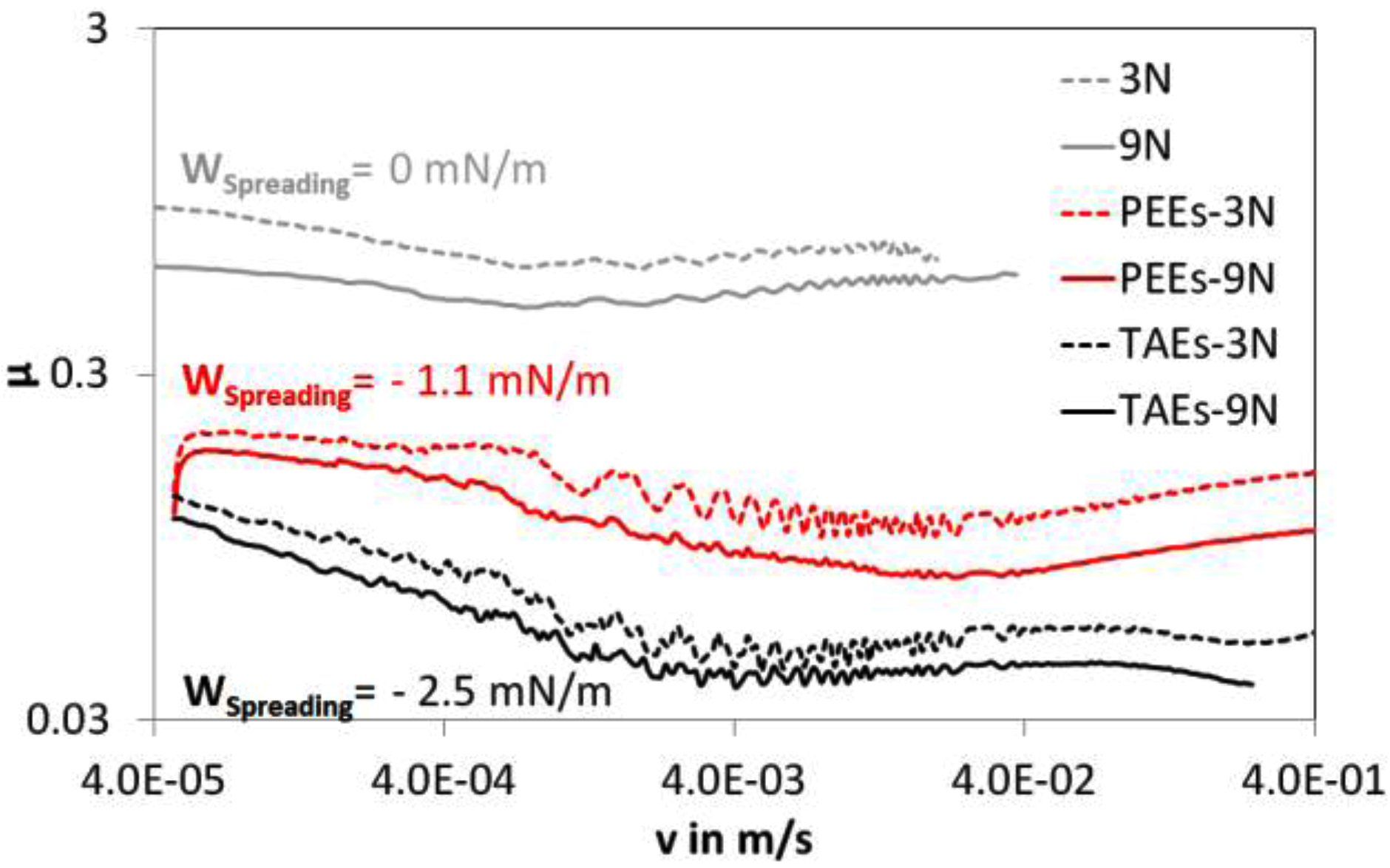
The negative values for work-of-spreading
Wspreading indicate that—from a purely energetic point of view—both lubricants will spontaneously move into the interface between the frictional partners. The wetting of the two frictional partners PEEK and steel does not need to be forced by e.g., applying a suitable sliding speed. Although the energetic point of view neglects the effect of the normal force, we observe for trimellitic acid ester a higher
ηv/
p factor and an increased film thickness of the lubricant which agrees well with the higher energetic benefit of spreading for TAEs. However, at the applied normal pressures of 33 and 47 MPa, a partial “squeeze out” [
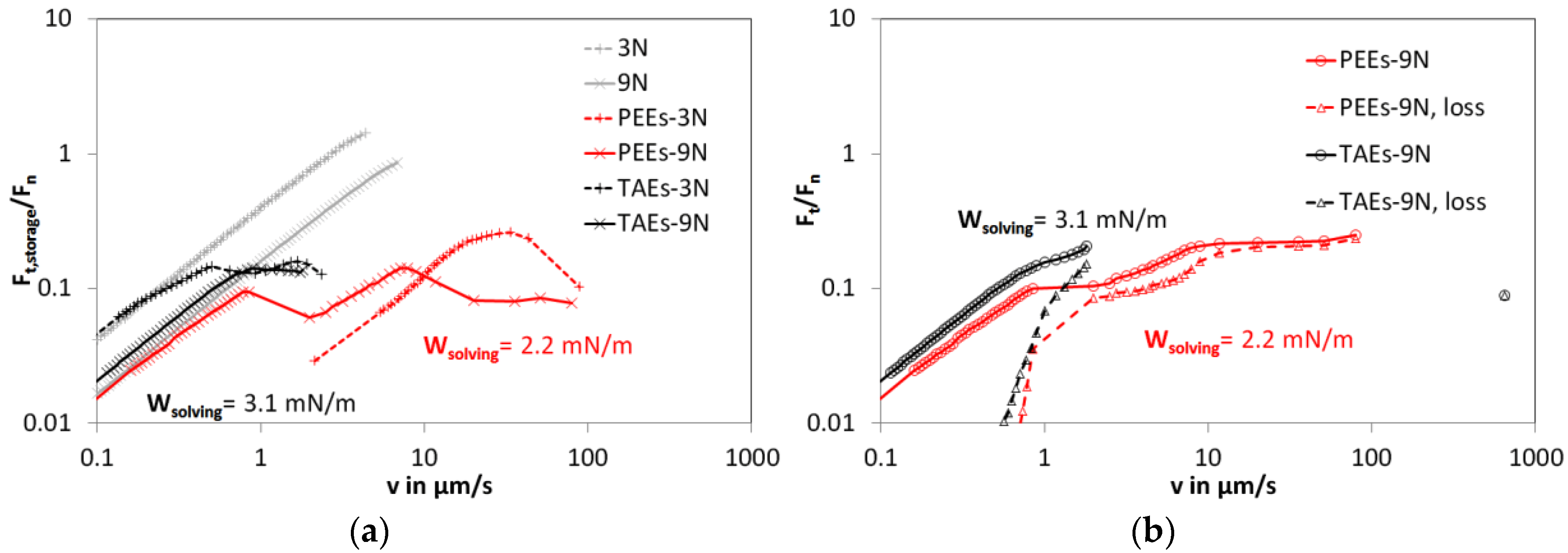
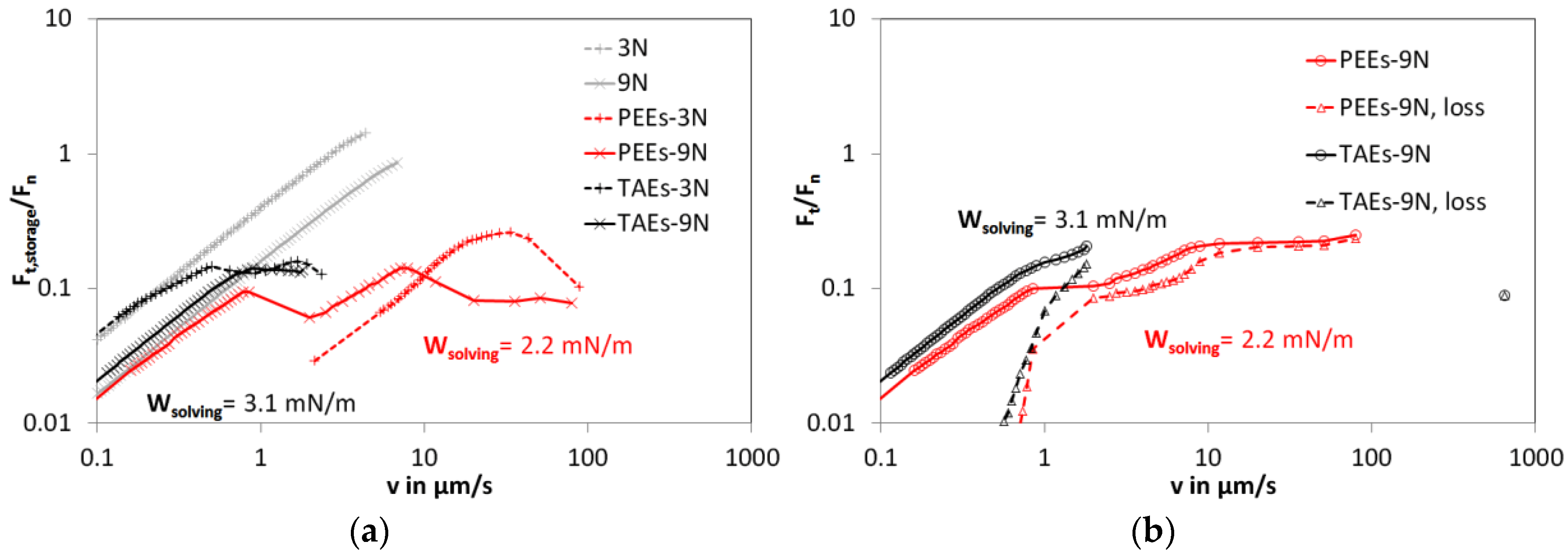
12] of the lubricant is likely to occur. The “squeeze out” at higher contact pressure is the origin of an adhesion-driven static friction phenomenon that was observed prior to the breakaway torque in the oscillatory experiments. Since the breakaway torque is substantially higher for the dry contact, only a partial “squeeze out” occurred. After the breakaway point, the adhesion energy which has been stored as elastic energy is dissipated by the sliding processes which can be seen in
Ft,loss.
The peak value of the curves measured in the oscillatory mode represents the maximum value of adhesion force which is reached by the tribosystem just prior to the onset of gliding at the end of the static friction regime. At a normal force of Fn = 9 N, both lubricated systems exhibit almost the same maximum value of adhesion force. However, the PEEs-lubricated tribosystem shows a prolonged static friction phase prior to gliding which results in a larger adhesion energy.
The analysis of the surface and interfacial energies supports the results of the tribological findings: a lower positive value of the work-of-solving Wsolving of the PEEs-lubricated system indicates that the PEEK surface chains could possess a higher mobility in a solved-like state. This results in a higher real surface area and thus in a higher total adhesion energy of the PEEK-steel interface, and therefore a higher static and dynamic friction coefficient.
In summary, at velocities beyond the adhesive stiction, both lubricants show a spontaneous wetting and spreading of the frictional partners, where TAEs shows a stronger tendency to invade the interface and thus to reduce the COF. In addition, the higher tendency of PEEs to mobilize the surface polymer chains possibly increases the adhesive interaction between the steel surface and PEEK, thus decreasing the slip-rate υ and by this increasing the COF in the dynamic region.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}