Analysis of Unbalance Response and Vibration Reduction of an Aeroengine Gas Generator Rotor System




Abstract
1. Introduction
2. Dynamic Model of the Complex Variable Cross-Section Discontinuous Rotor Support System
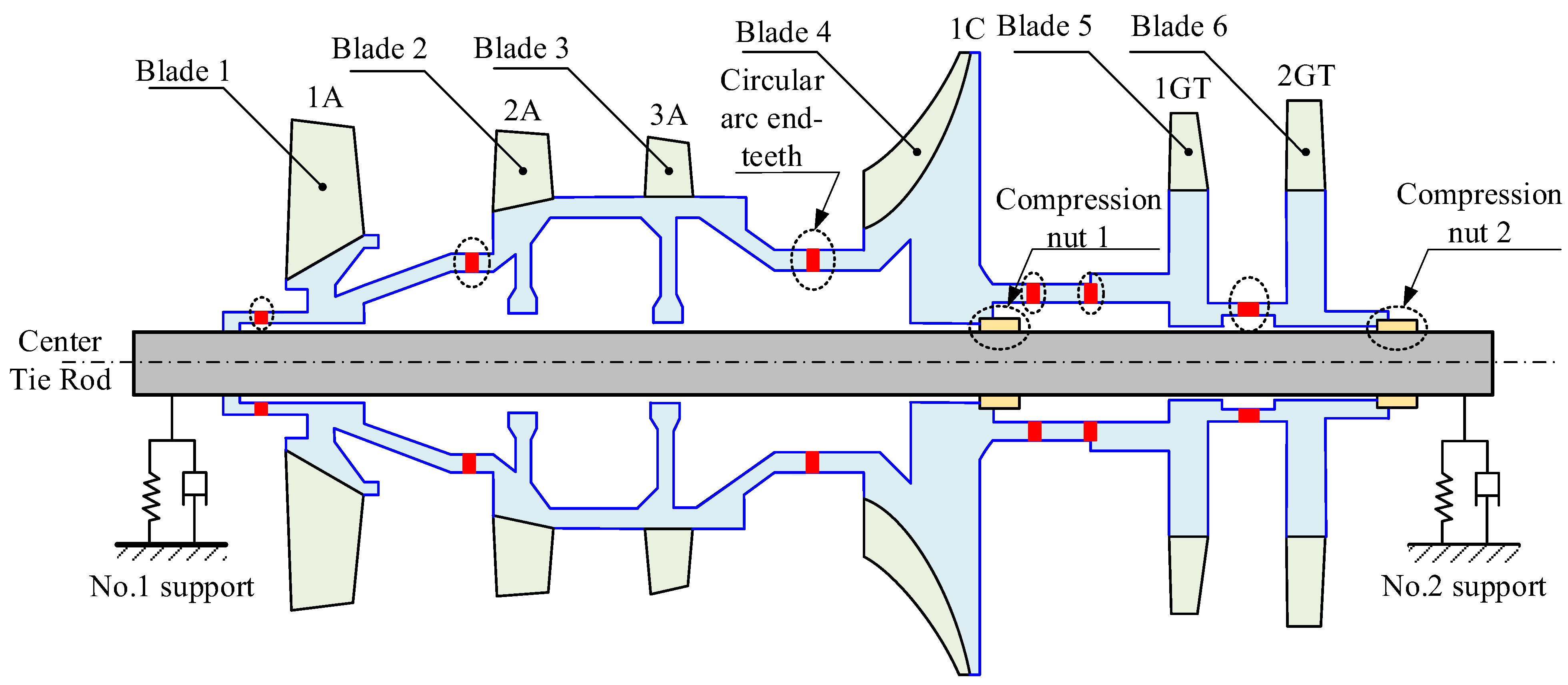
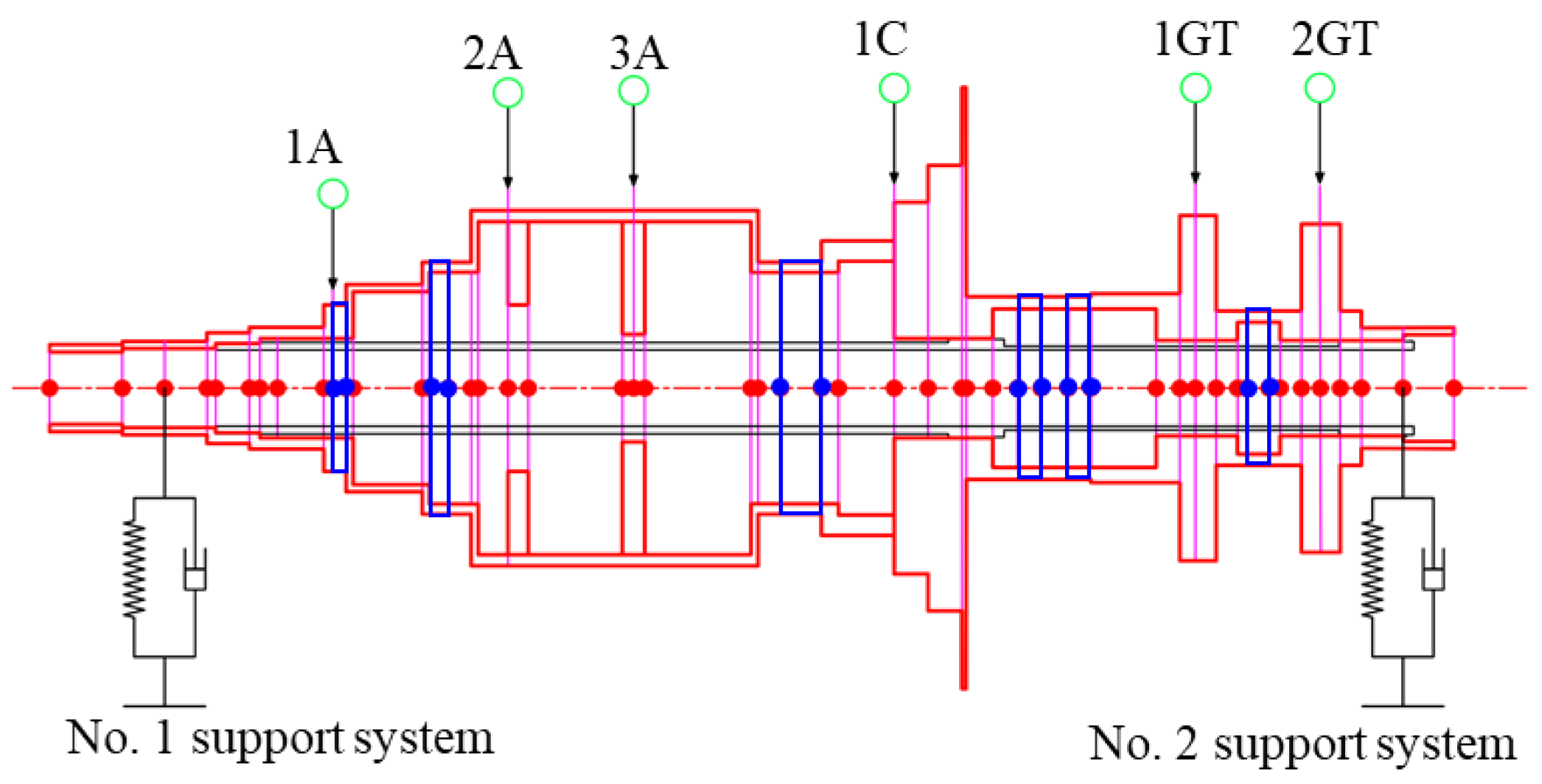
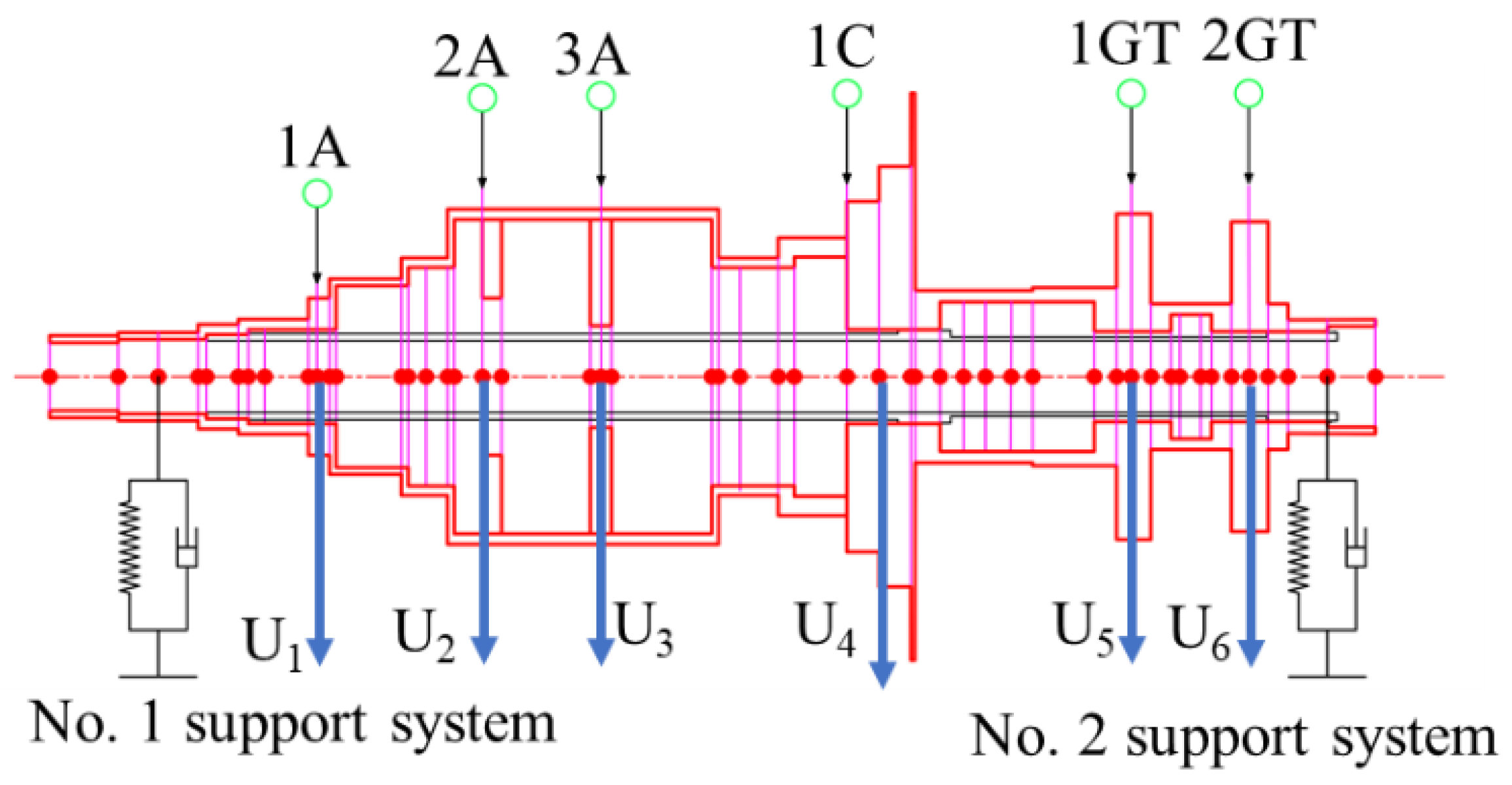
2.1. Description of the Model
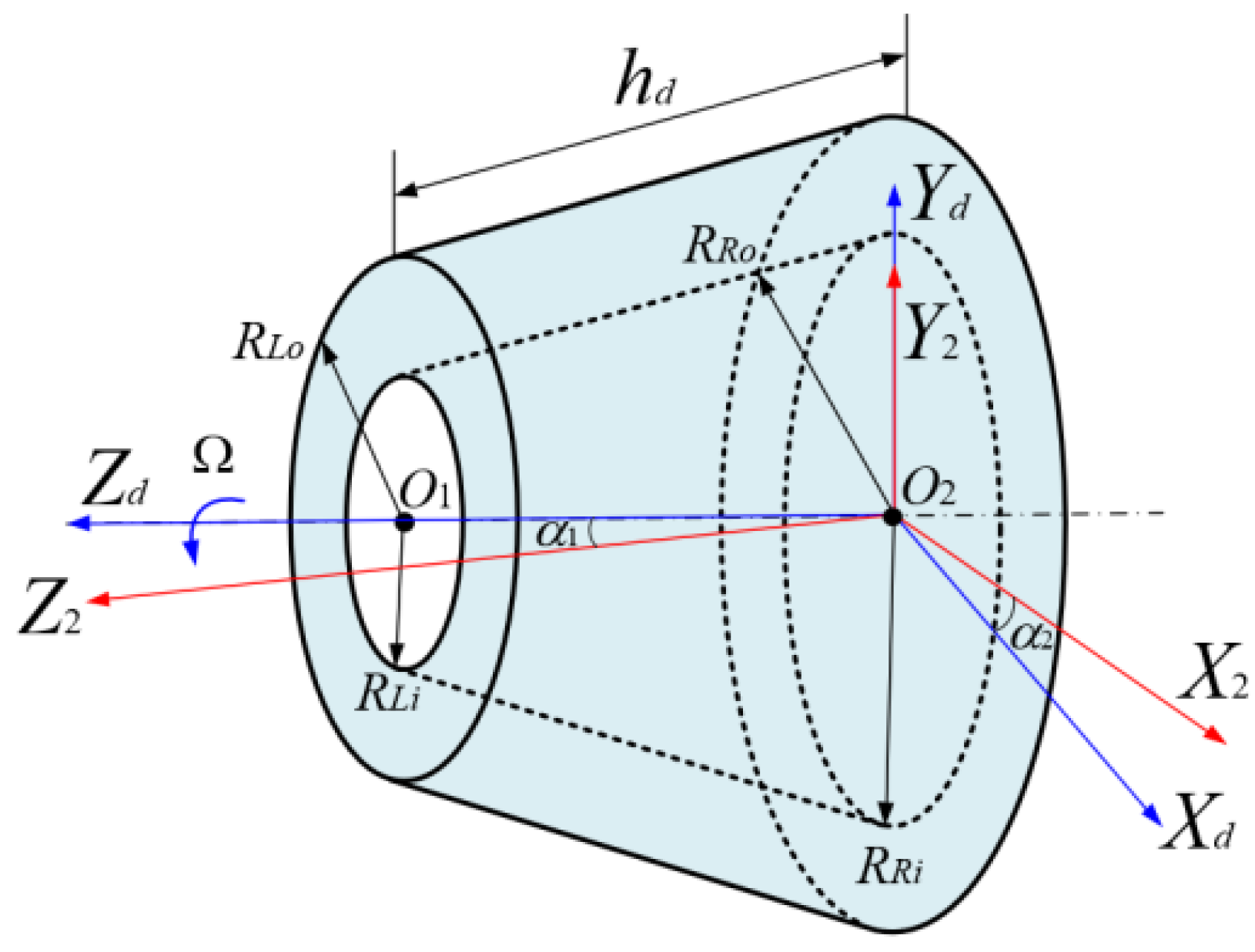
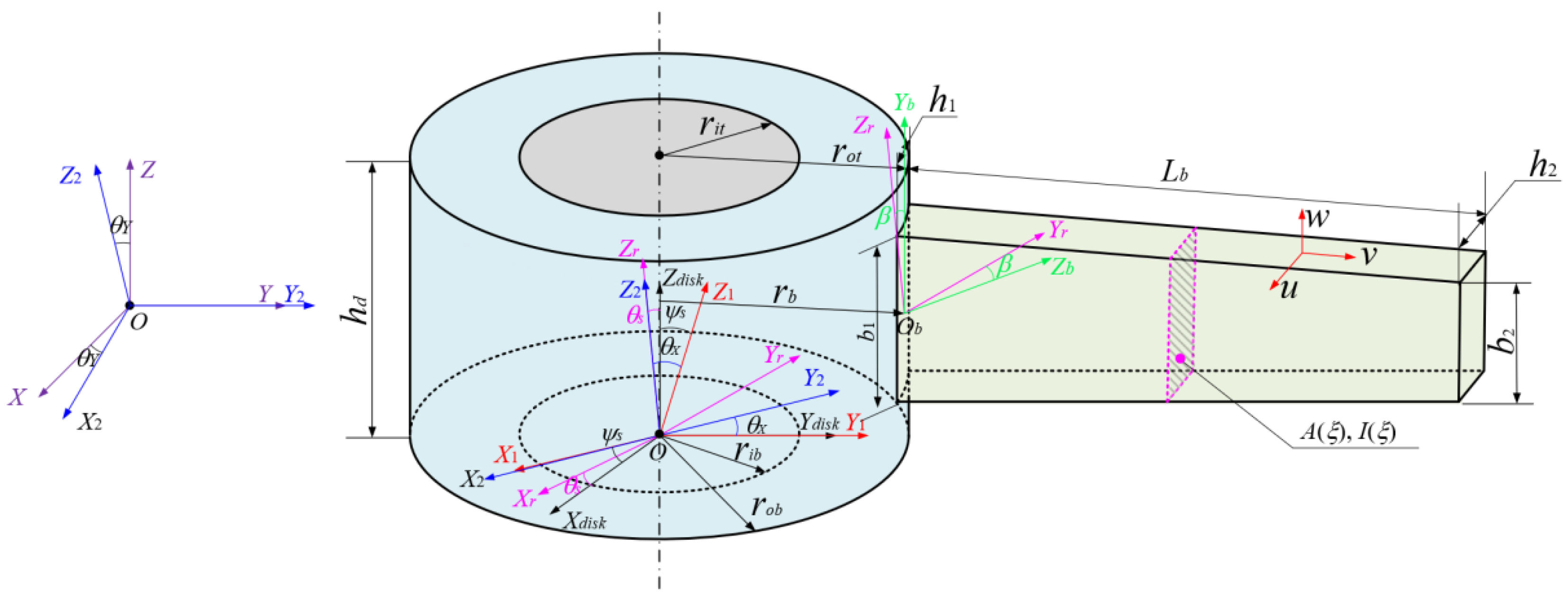
2.2. Model of Rotating Disk–Blade System
- (1)
- The disk is treated as a rigid body, and its elastic deformation is disregarded;
- (2)
- The blade and disk are assumed to be rigidly connected, and nonlinear effects such as contact surface slip and clearance are ignored;
- (3)
- Load transfer occurs exclusively through the connection nodes, and local stress concentration or fatigue damage is not considered;
- (4)
- The influence of external excitations, such as aerodynamic loads and temperature gradients, is neglected.
2.3. The Model of the Circular Arc End-Teeth Connection Structures
- (1)
- Variation in contact area at the contact interface of the circular end-teeth
- (2)
- Variation in contact properties at the contact interface of the circular end-teeth
- (3)
- Bending deformation of preloaded combined rotors
2.4. The Model of Support Systems with Squeezed Film Dampers
- (1)
- Negligible film inertia effects, excluding fluid acceleration terms from the momentum equations;
- (2)
- Incompressible Newtonian lubricant satisfying mass conservation;
- (3)
- Constant dynamic viscosity coefficient μ within operational temperature ranges;
- (4)
- Dominant circumferential pressure gradient over radial direction, establishing quasi-steady pressure distribution.
2.5. Solution Procedure
3. Numerical Example and Discussion
3.1. Analysis of Unbalance Response Characteristics of the Aeroengine Rotor Support System
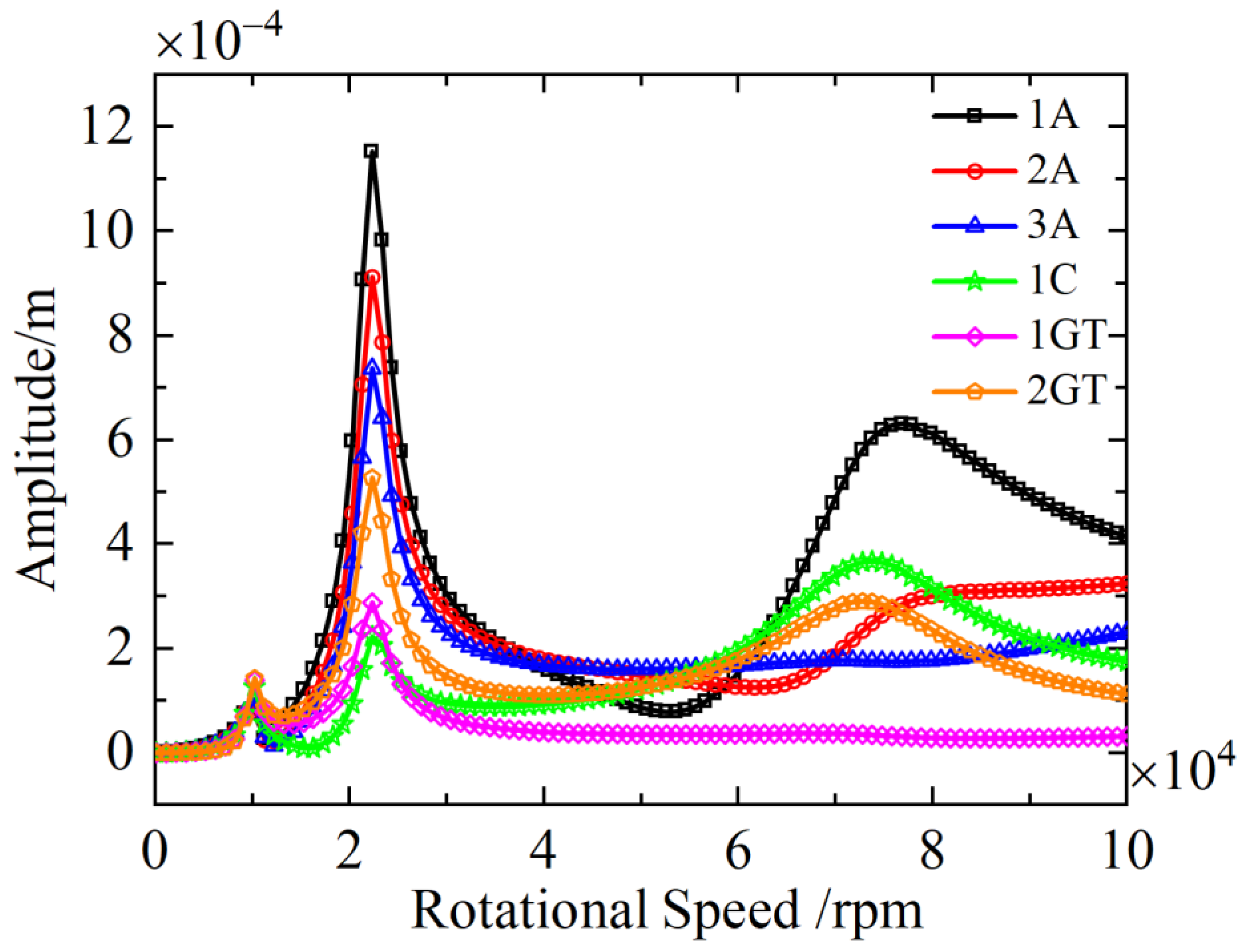
3.1.1. The Influence of Unbalance Mass at Different Axial Distributions on the Unbalance Response
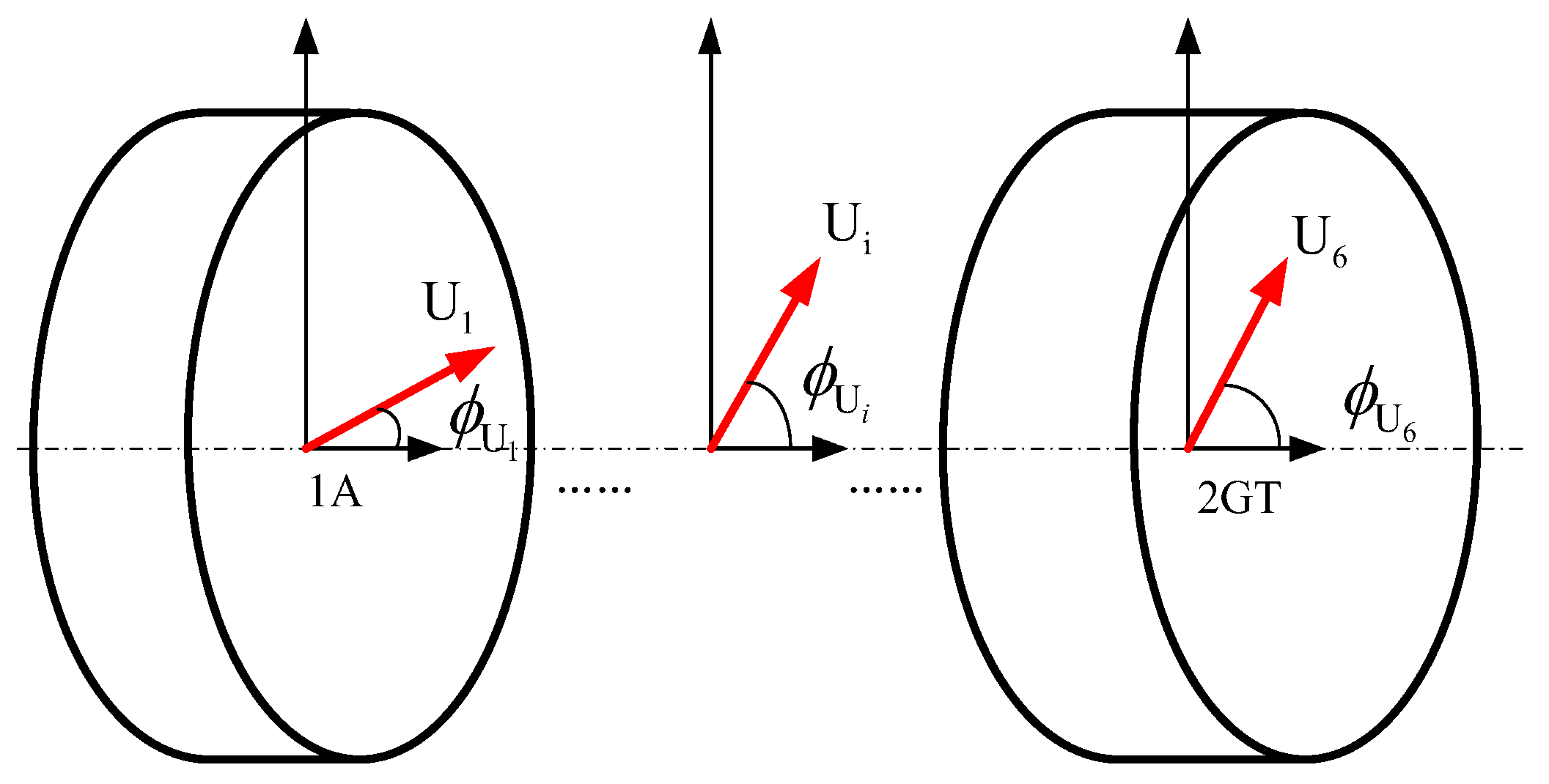
3.1.2. The Influence of Unbalance Mass at Different Circumferential Positions on the Unbalance Response
3.2. Analysis of Vibration Reduction of the Aeroengine Rotor Support System
3.2.1. Vibration Reduction of Rotor Support Systems Based on the Unbalance Response Characteristics
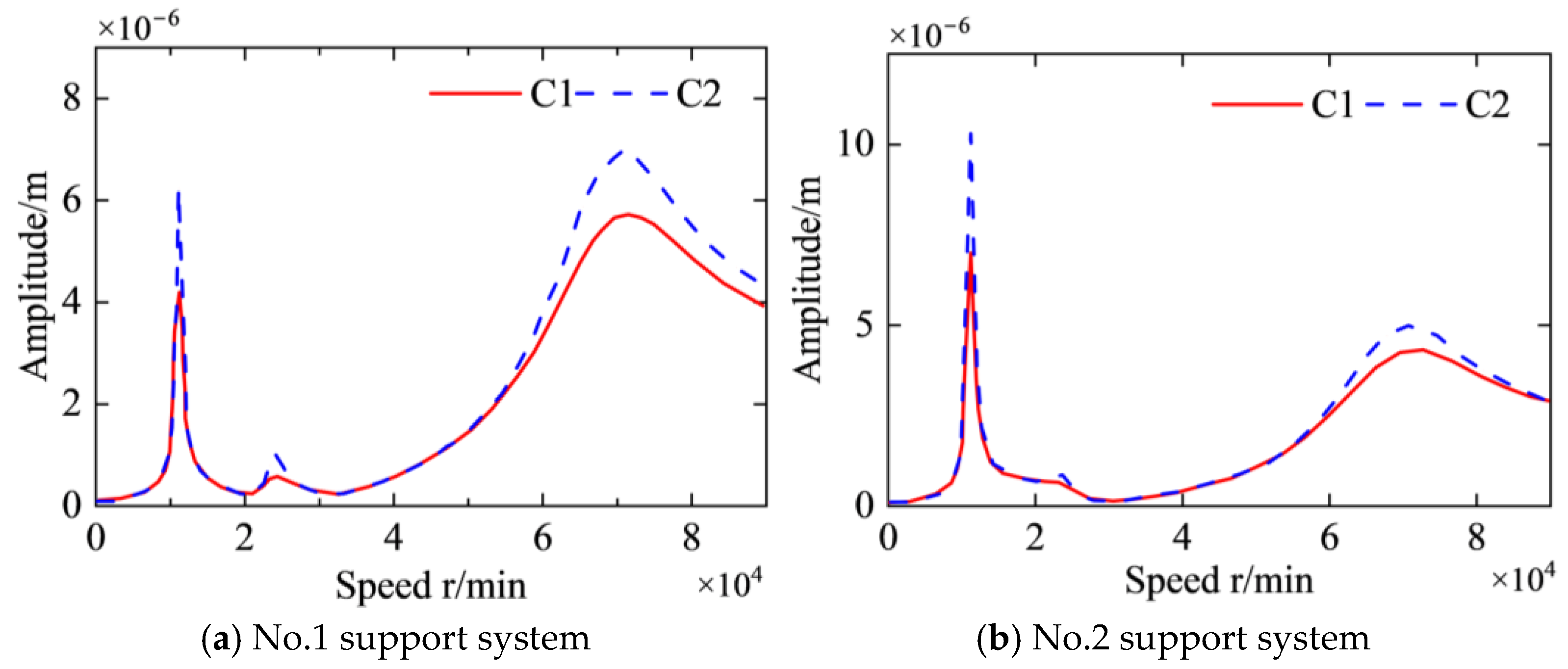
3.2.2. Vibration Reduction of Rotor Support Systems Based on the Characteristics of Combined Support Systems
3.3. Experimental Validation
3.3.1. Experimental 1: Validation of the Vibration Reduction Method Based on the Unbalance Response Characteristics
- (1)
- Install the test rotor on the test bench and deploy sensors: Acceleration sensors are installed at the positions of the left and right supports, an eddy current displacement sensor is installed at the centroid of the rotor and a photoelectric sensor is installed on the right side of the shaft. Then, open the testing software, configure the sensor information and set the test conditions;
- (2)
- Inspect and debug the equipment. The drive motor is connected to the right end of the rotor through a coupling to drive the rotor to rotate. The rotational speed of the rotor system is controlled by changing the voltage through the motor speed controller. The magnetic hydraulic control switch is used to fill the inside of the support structure with hydraulic oil. After low-speed trial operation is safe and error-free, turn off the relevant equipment;
- (3)
- Turn on the oil pump and start the motor to collect the vibration signals of the rotor support system at different rotational speeds;
- (4)
- Complete data collection work, disassemble and tidy up the test bench.
- (1)
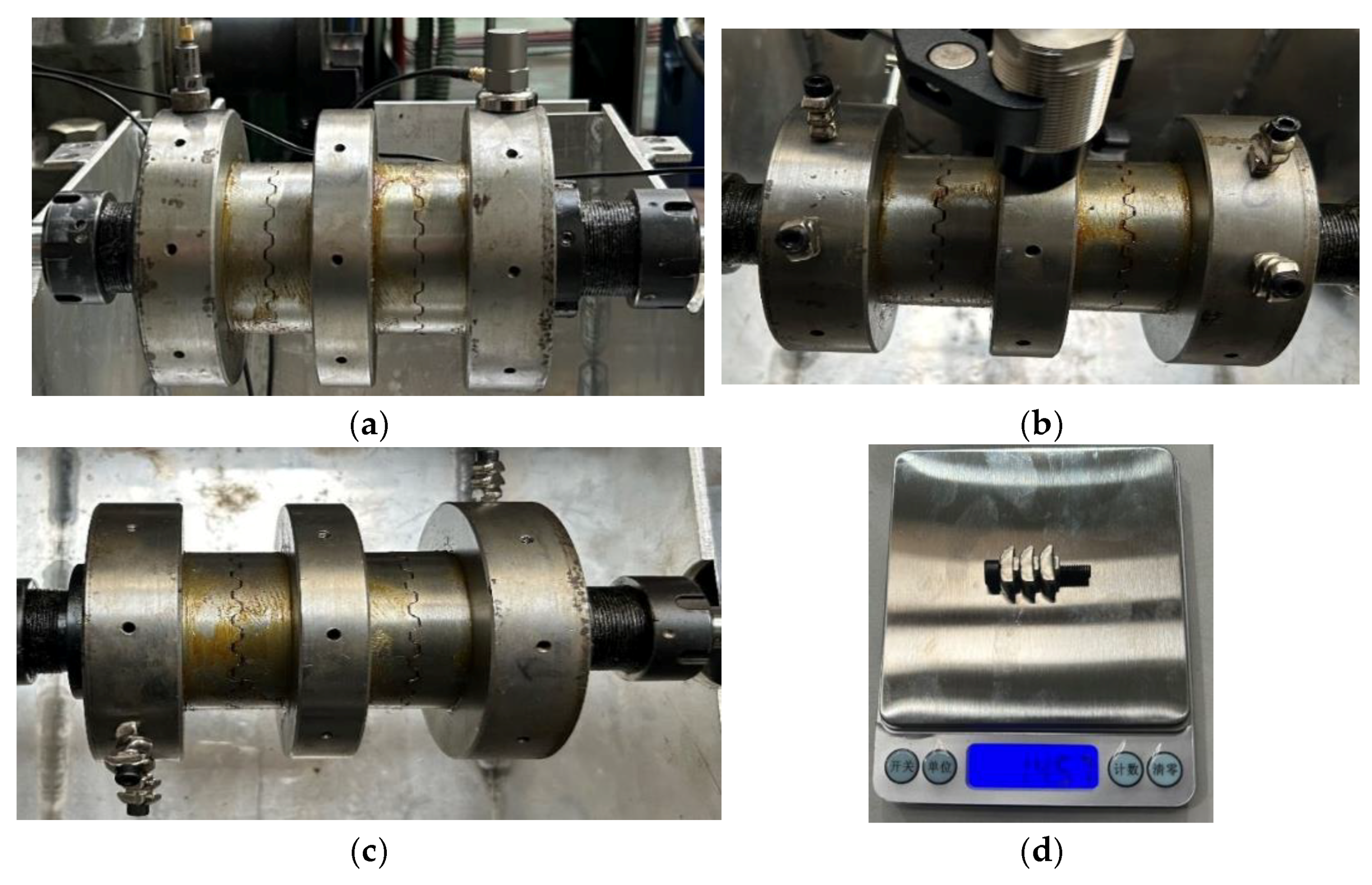
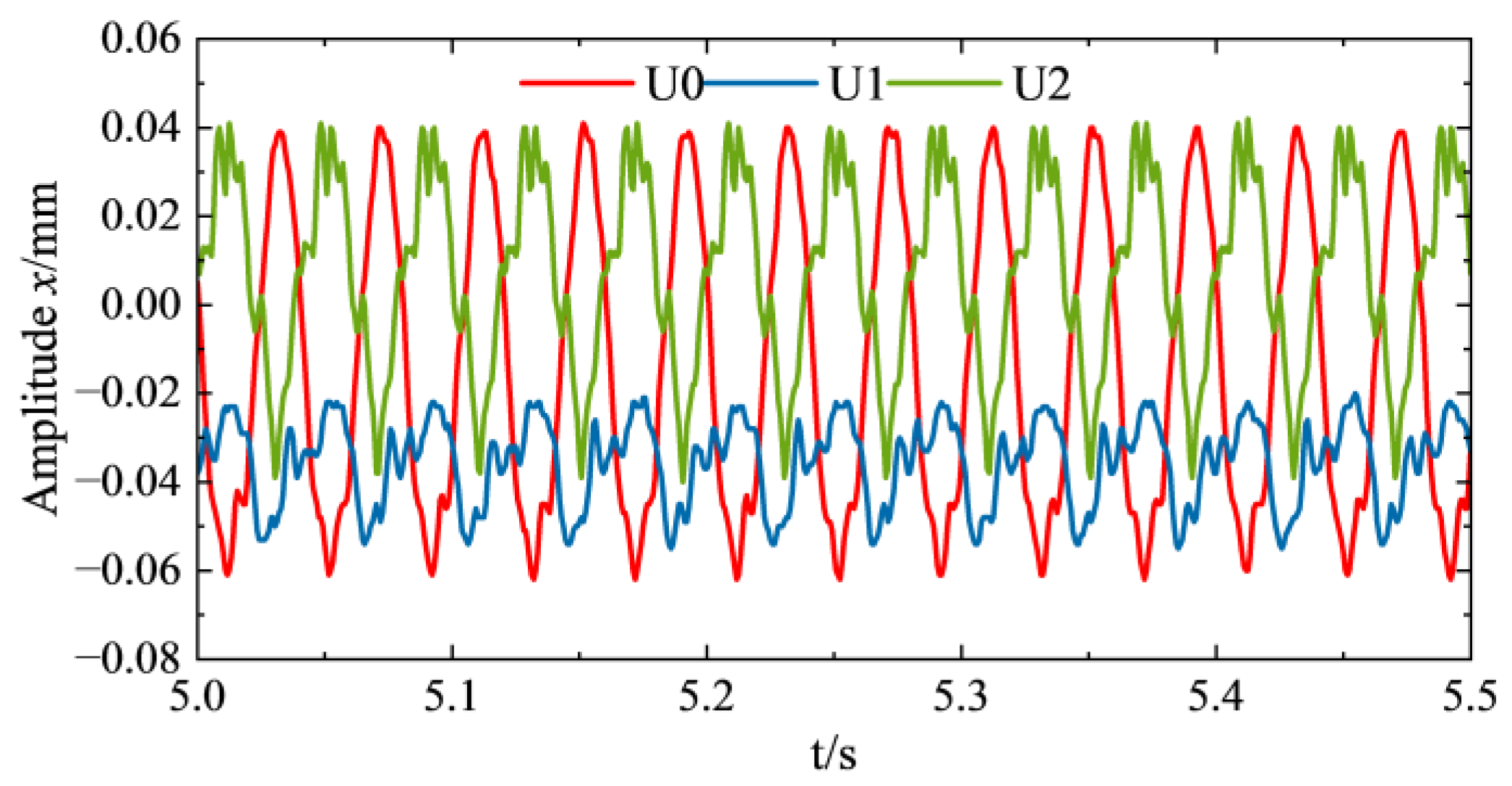
- The three-point dynamic balancing method was used to calibrate the initial unbalance of the test rotor, and the initial unbalance mass of the left calibration disk was measured to be 81.92 g with a phase of 0° (as shown in Figure 18a), which was recorded as the initial unbalance state U0. The motor is started under this condition and the vibration response signal of the rotor system in the initial unbalance state is collected.
- (2)
- A weight block of 14.57 g (single mass block, as shown in Figure 18d) is attached via standard screws, and an unbalanced mass is attached at a specific circumferential position of the left and right calibration disks to adjust the initial unbalanced state U₀ to the U₁ state: 55 g unbalanced mass in the left disk at 0° phase, and 26.92 g unbalanced mass in the right disk at 0° phase (as shown in Figure 18b). After completing the counterweight installation, the test system is restarted to collect the rotor vibration response signals for this unbalance distribution state.
- (3)
- Keeping the unbalanced state of the left disk unchanged, a 14.57 g counterweight block is attached to the circumferential position of the right calibration disk by the same counterweight method, and the unbalanced phase of the right disk is adjusted to 180°, forming a U₂ state: 55 g/0° for the left disk and 26.92 g/180° for the right disk (as shown in Figure 18c). The test stand is started again to collect the rotor vibration response data under this axial asymmetric unbalance distribution.
3.3.2. Experimental 2: Validation of the Vibration Reduction Based on the Characteristics of Combined Support Systems
- (1)
- The test rotor is mounted on the SFD-elastic support system and connected to the motor via diaphragm coupling, and sensors are then positioned;
- (2)
- The oil supply system is activated, the motor is started and vibration signals from the rotor support system are collected at various speeds;
- (3)
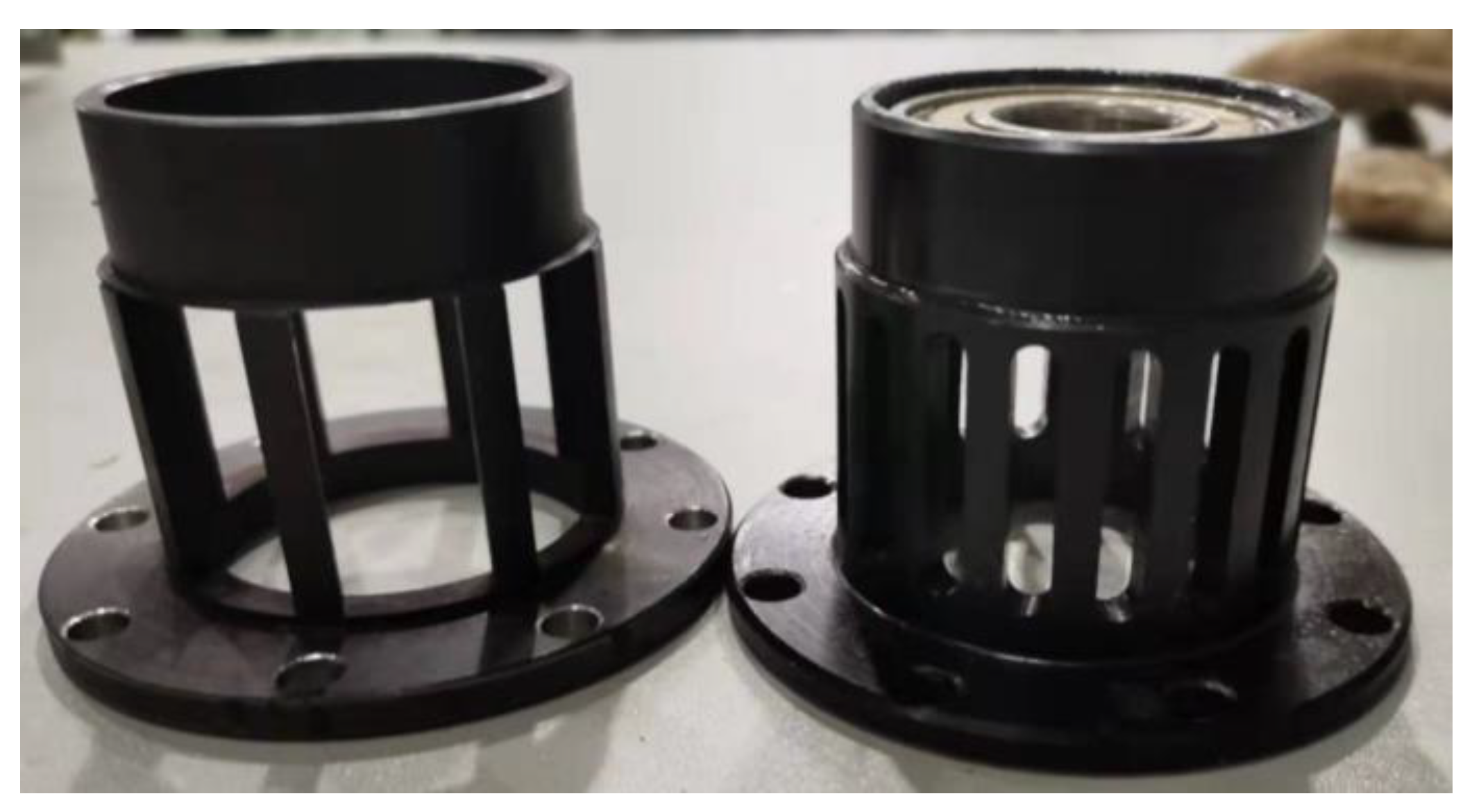
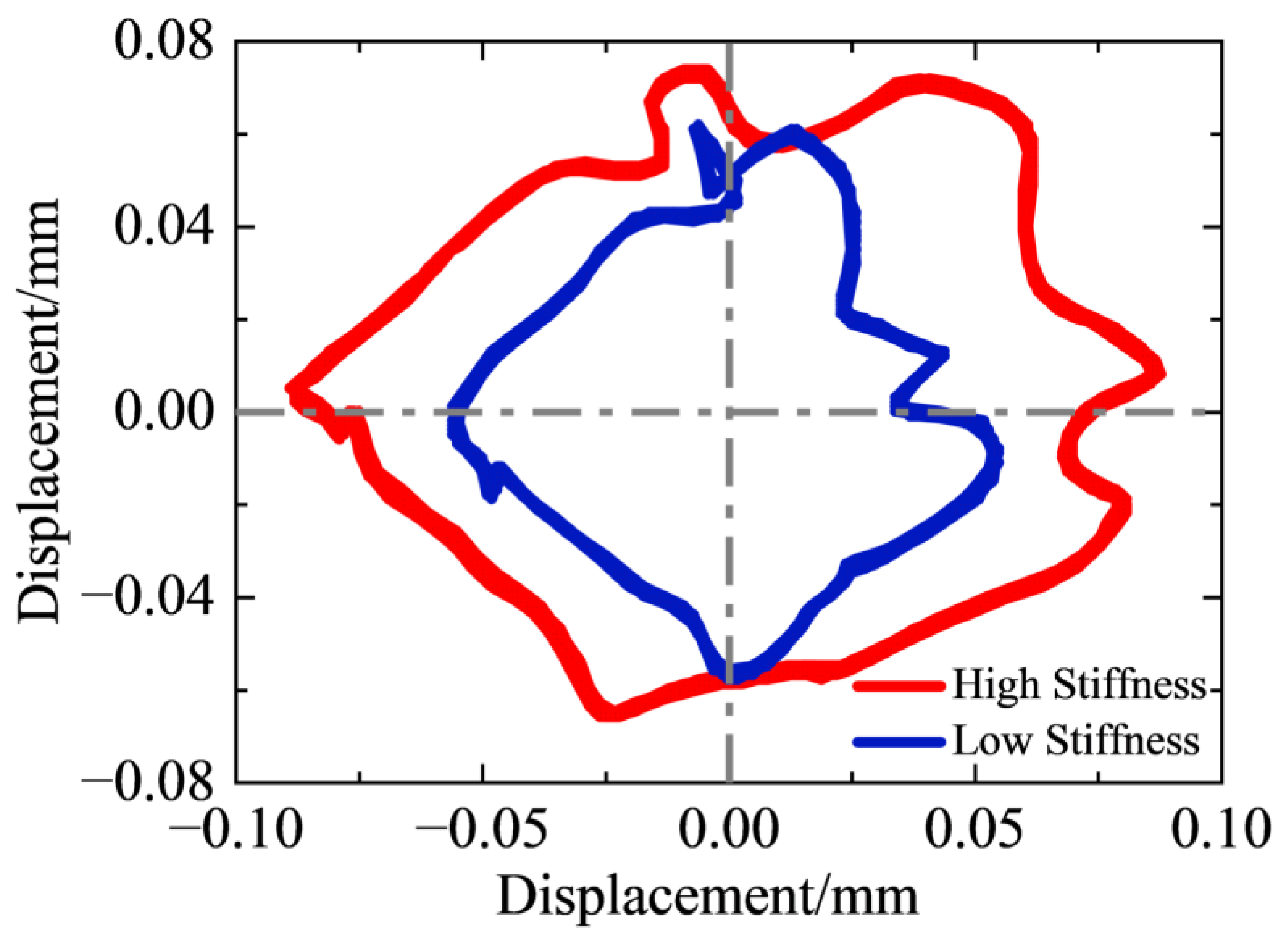
- The cage-type elastic support of the squeeze film damper–elastic support system is modified, as shown in Figure 21, and the previous experimental steps are repeated to collect vibration signals at different stiffness levels;
- (4)
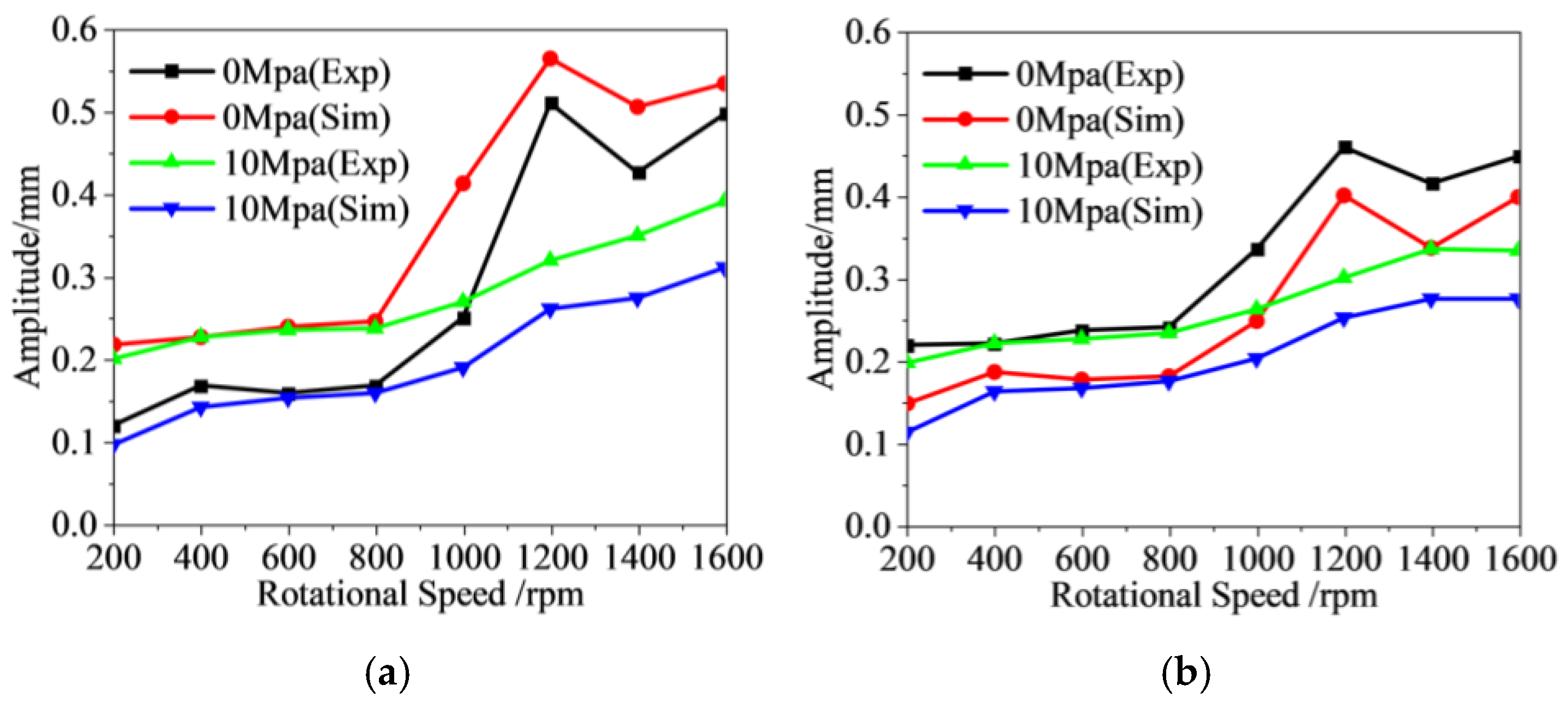
- The oil pressure of the squeeze film damper–elastic support system is varied (0 to 10 MPa), and vibration signals are collected at different damping levels;
- (5)
- The experimental data are then organized.
4. Conclusions
- (1)
- A robust dynamic model was established for aeroengine rotors with variable cross-sections, discrete support systems and end-tooth coupling-induced stiffness changes, forming the foundation for analyzing unbalance response mechanisms in discontinuous structures.
- (2)
- The axial positions of unbalance mass (1A, 1C, 2GT) were identified as highly sensitive to vibration characteristics, with phase angle differences between excitations directly affecting harmonic amplitude distributions. For instance, phase differences near 0° amplify the first and third harmonics while suppressing the second harmonic, whereas near 180° reduces the first and third harmonics and increases the second harmonic.
- (3)
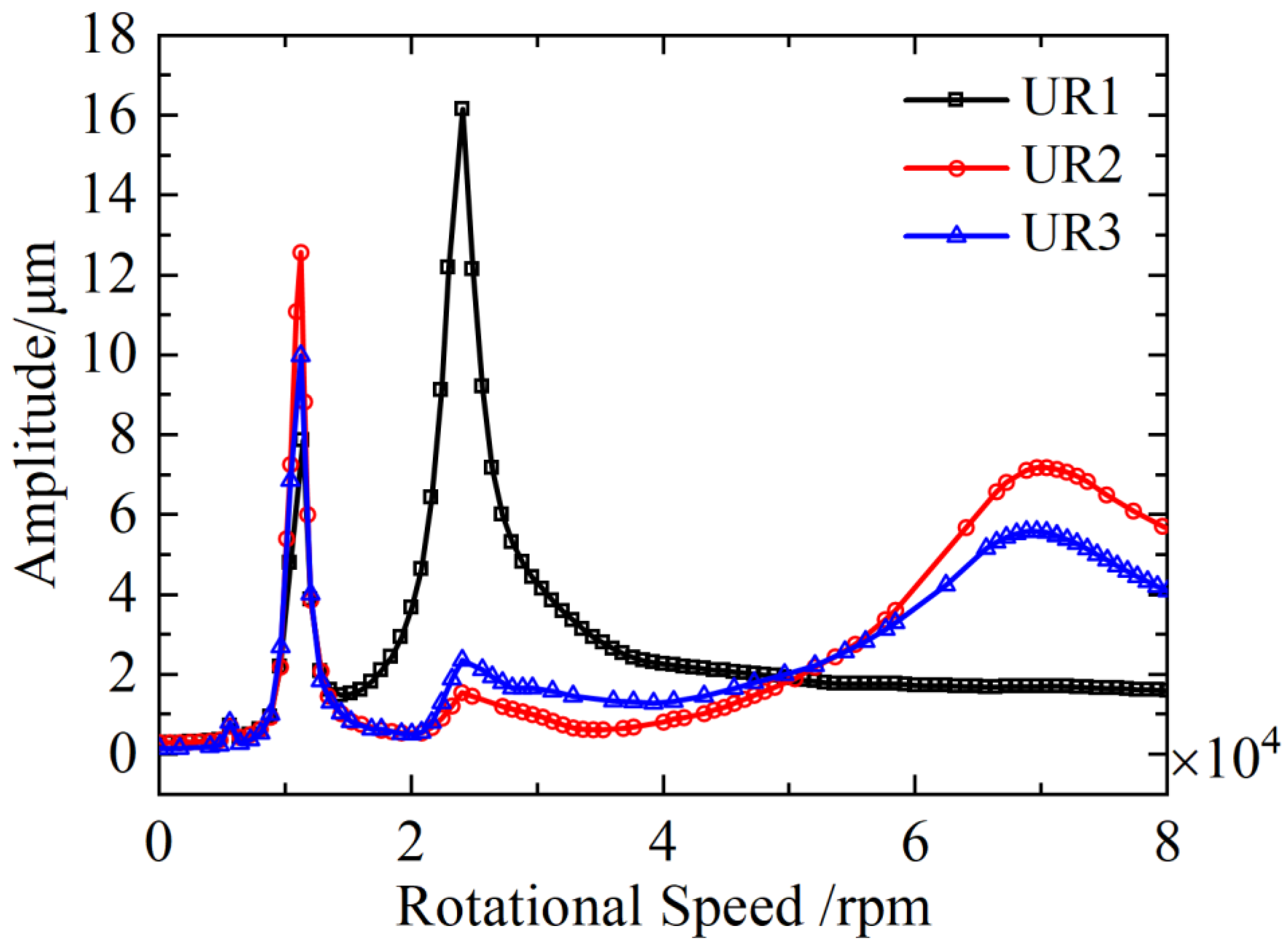
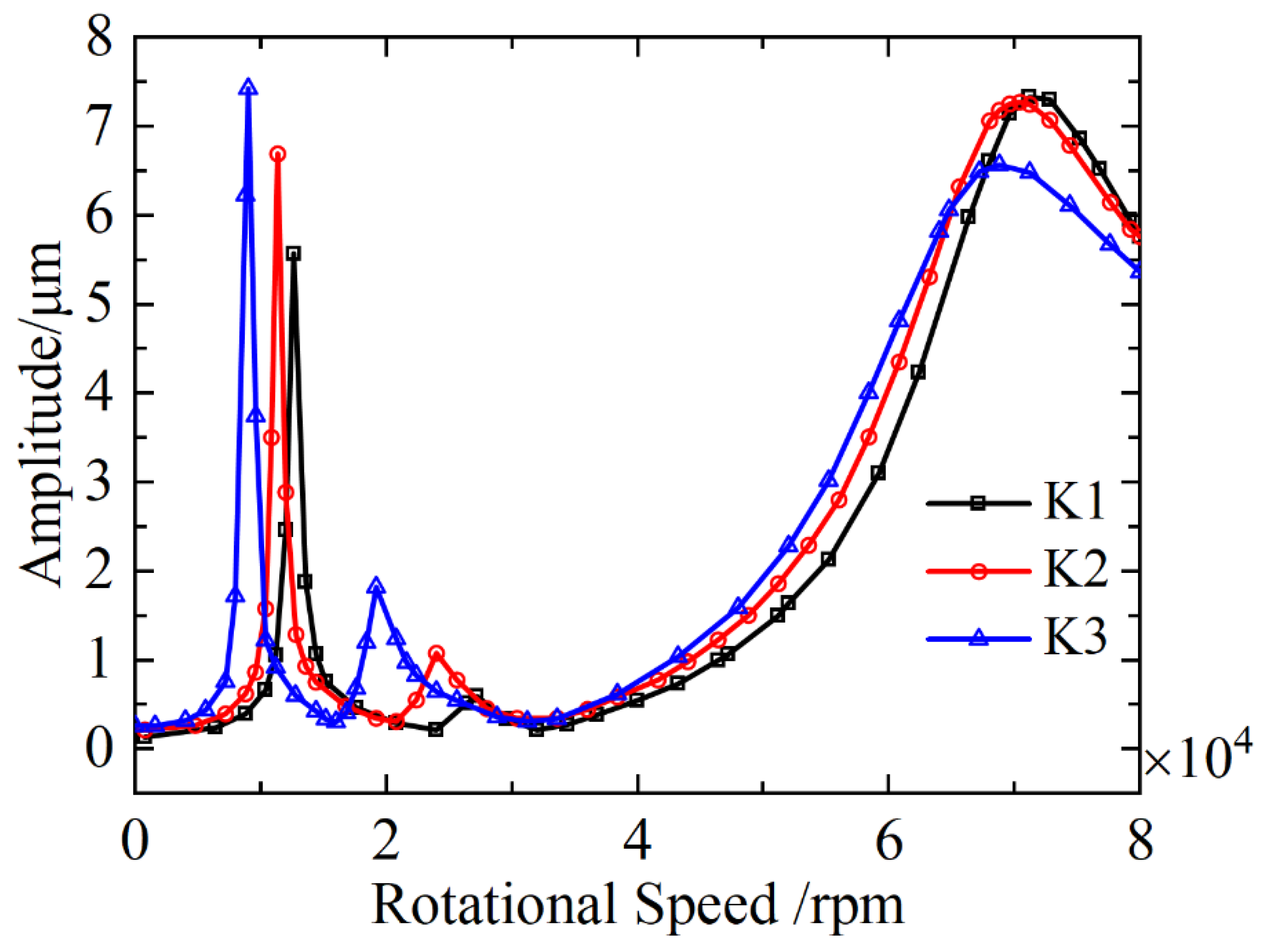
- A practical vibration reduction framework was proposed, where support stiffness and damping are adjusted relative to operational speed. Stiffness maximization is recommended at speeds above 30,000 rpm, and UR1 (targeting 0–15,000 rpm), UR2 (15,000–50,000 rpm) and UR3 (50,000–80,000 rpm) are optimized for specific ranges, with damping enhancement further validated as an effective complement to stiffness control.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| α1 | Angle between the coordinate axes Zd and Z2 | α2 | Angle between the coordinate axes Xd and X2 |
| RLi, RRi | The inner diameters of the left and right ends of the disk | RLo, RRo | Inner diameters of the left and right ends of the disk |
| , | Masses of the inner and outer disks | Md | Mass of the turntable |
| U(xi − yi) | Step function | Jd | Diameter moment of inertia |
| Thickness of the disk | Jp | Pole moment of inertia | |
| Xc, Yc, Zc | Disk center of mass displacement | e | Eccentric distance between center of mass and shape center |
| Ω | Rotation speed | ψ | Initial phase angle of disk mass center |
| Lb | Length of the blade along the Xb direction | b1, b2 | Widths of the leaf root and tip positions along the Zb direction |
| h1, h2 | Thicknesses of the leaf root and tip positions along the Yb direction | u, v, w | Deformation on the tip of the blade in the Xb, Yb and Zb directions |
| ξ | Dimensionless position of any point of the variable-section blade along the Xb direction | ηb, ηh | Taper ratios of the variable cross-section blades along the Yb and Zb directions |
| A(ξ) | Variable cross-section area of inertia of the blade | I(ξ) | Variable cross-section moment of inertia of the blade |
| rQ | Position vectors of any point on the blade | x, y, z | Geometric coordinates under the local coordinate system ObXbYbZb |
| Xdisk, Ydisk, Zdisk | Geometric coordinates of the disk under the overall coordinate system OXYZ | rb | Outer diameter of the disk at the blade connection position |
| Ai(i = 1,2,3,4,5) | Transformation matrix between the coordinate systems OXYZ, OXdiskYdiskZdisk, OXrYrZr and ObXbYbZb | β | Blade mounting angle |
| Tblade | Kinetic energy for the rotating variable-section blade | ρb | Density of the blade, denoting the kinetic energy without considering the torsional deformation of the rotating blade |
| T1, T2, T3 | Kinetic energy without considering the torsional deformation of the rotating blade | Ublade | Potential energy expression for blade |
| Eb | Modulus of elasticity of the variable cross-section blade | Gb | Sshear modulus of the variable cross-section blade |
| κb | Shear factor of the variable cross-section blade | fc | Centrifugal force of the rotating blade |
| Tblade-disk | Kinetic energy for the blade–disk system | Ublade-disk | Potential energy for the blade–disk system |
| nb | Number of blades in the disk | η | Overall stiffness degradation correction coefficient of the circular arc end-teeth structure |
| η1, η2, η3 | Correction coefficients for interfacial contact area of the circular arc end-teeth, interfacial contact effect, and bending deformation of the rotor assemblies | Kcontact | Contact stiffness of circular arc end-teeth structure |
| The contact stiffness of smooth interfaces of circular arc end-teeth structure under initial axial load | Wc | Strain energy of the circular arc end-teeth connection structure | |
| Fc | Normal preload force | EL, ER | Modulus of elasticity of the left and right end teeth |
| Ac | Contact area of the end-teeth structure; | bL, bR | Thickness of the left and right end teeth |
| bc | Thickness of the connecting region of the end-teeth | Eequ | Elastic modulus of the equivalent ring |
| Density of the equivalent ring | μL, μR | Equivalent Poisson’s ratio of the left and right end teeth | |
| εc, εh | Normal strain and transverse strain of the circular arc end-teeth | μequ | Poisson’s ratio for the equivalent ring |
| μSFD | Viscosity of the oil film | RSFD | Radius of the oil film |
| Rotational angular velocity of the rotary axis | p | Pressure of the film | |
| h | Thickness of the film | CSFD | Radial clearance of the film |
| eSFD | Eccentric distance of the shaft neck | εSFD | Eccentricity ratio of the shaft neck |
| LSFD | Length of the oil film | MT | System mass matrices |
| Mr | Rotational inertia matrices | Ct | Damping matrices of SFD |
| G | Gyroscopic matrices | K | Stiffness matrices |
| Fe | Unbalance excitation force | FSFD | Squeeze film force |
| q | Displacement vector | Rayleigh damping matrices | |
| α, β | Damping coefficients of Rayleigh damping | ε1, ε2 | Damping coefficient of the rotor system |
| ϕu | Phase angles for each unit | m(z) | Magnitude of the unbalance |
| U(z) | Unbalance vector |
References
- Matsushita, O.; Tanaka, M.; Kanki, H.; Kobayashi, M.; Keogh, P. Vibrations of Rotating Machinery; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Li, X.-Q.; Song, L.-K.; Bai, G.-C. Recent advances in reliability analysis of aeroengine rotor system: A review. Int. J. Struct. Integr. 2021, 13, 1–29. [Google Scholar] [CrossRef]
- Chen, G. Vibration modelling and verifications for whole aero-engine. J. Sound Vib. 2015, 349, 163–176. [Google Scholar] [CrossRef]
- Jin, M.; Wang, A.; Wang, Q.; Wang, L.; Ma, W. Dynamic Characteristics a Analysis of a New Type of Central Tie Rod Rotor-Blade-Bearing Coupling System Considering the End-Tooth Connection Structure. J. Mech. Eng. 2021, 57, 124–136. [Google Scholar]
- Jin, Y.; Lu, K.; Huang, C.; Hou, L.; Chen, Y. Nonlinear dynamic analysis of a complex dual rotor-bearing system based on a novel model reduction method. Appl. Math. Model. 2019, 75, 553–571. [Google Scholar] [CrossRef]
- Tarkashvand, A.; Golmohammadi, A.; Safizadeh, M.S. Stability and modal analysis of an unbalanced asymmetric multi-disk rotor system on bearings as viscoelastic substrate. Arch. Appl. Mech. 2022, 92, 2247–2271. [Google Scholar] [CrossRef]
- Yang, Y.; Yao, M.; Niu, Y.; Wu, Q.; Wang, C. Model verification and vibration analysis of the four-disk hollow flexible shaft rotor system. Int. J. Mech. Sci. 2024, 268, 109051. [Google Scholar] [CrossRef]
- Bonello, P.; Hai, P.M. Computational Studies of the Unbalance Response of a Whole Aero-Engine Model with Squeeze-Film Bearings. J. Eng. Gas Turbines Power 2009, 132, 032504. [Google Scholar] [CrossRef]
- Ma, P.; Zhai, J.; Wang, Z.; Zhang, H.; Han, Q. Unbalance Vibration Characteristics and Sensitivity Analysis of the Dual-Rotor System in Aeroengines. J. Aerosp. Eng. 2021, 34, 04020094. [Google Scholar] [CrossRef]
- He, J.; Jiang, D.; Zhang, D.; Tang, Z.; Fei, Q. Model updating of rotor system based on the adaptive Gaussian process model using unbalance response. J. Sound Vib. 2024, 571, 118006. [Google Scholar] [CrossRef]
- Yang, W.; Liang, M.; Wang, L.; Yuan, H. Research on unbalance response characteristics of gas turbine blade-disk rotor system. J. Vibroeng. 2018, 20, 1676–1690. [Google Scholar] [CrossRef]
- Chen, X.; Zhai, J.; Zhang, H.; Han, Q. Simulation study on unbalance vibration characteristics of dual-rotor system. SN Appl. Sci. 2020, 2, 1423. [Google Scholar] [CrossRef]
- Song, L.; Chen, Y. A Prediction Model of Two-Sided Unbalance in the Multi-Stage Assembled Rotor of an Aero Engine. Machines 2024, 12, 503. [Google Scholar] [CrossRef]
- Chen, Y.; Cui, J.; Sun, X. An Unbalance Optimization Method for a Multi-Stage Rotor Based on an Assembly Error Propagation Model. Appl. Sci. 2021, 11, 887. [Google Scholar] [CrossRef]
- Cruz, W.; Arzola, N.; Araque, O. Modeling and experimental validation of the vibration in an unbalance multi-stage rotor. J. Mech. Eng. Sci. 2019, 13, 5703–5716. [Google Scholar] [CrossRef]
- Hong, J.; Li, T.; Liang, Z.; Zhang, D.; Ma, Y.; Wang, Y. Safety Design Methods for Rotor-Bearing System and Dynamic Analysis in Aero-Engines. In Proceedings of the ASME Turbo Expo 2018: Turbomachinery Technical Conference and Exposition, Oslo, Norway, 11–15 June 2018. [Google Scholar]
- Yao, J.; Liu, L.; Yang, F.; Scarpa, F.; Gao, J. Identification and optimization of unbalance parameters in rotor-bearing systems. J. Sound Vib. 2018, 431, 54–69. [Google Scholar] [CrossRef]
- Wang, L.; Wang, A.; Jin, M.; Huang, Q.; Yin, Y. Nonlinear effects of induced unbalance in the rod fastening rotor-bearing system considering nonlinear contact. Arch. Appl. Mech. 2020, 90, 917–943. [Google Scholar] [CrossRef]
- Guskov, M.; Gibert, C.; Sanchez, L.; Thouverez, F. Unbalance response of a dual shaft test rig with a squeeze film damper: Design, prediction and experiment. In Proceedings of the CFM 2009-19ème Congrès Français de Mécanique, Marseille, France, 24–28 October 2009. [Google Scholar]
- Qin, W.; Zhang, J.; Wang, H.; Ren, X. Response and Bifurcation of Rotor with Squeeze Film Damper Supported on Elastic Foundation. J. Northwest. Polytech. Univ. 2006, 24, 245–248. [Google Scholar]
- He, W.; Pan, B.; Bai, J. Transient response analysis of squeezed film damper rotor system under sudden unbalance load. Gas Turbine Exp. Res. 2020, 33, 36–40. [Google Scholar]
- Sun, K.; Luo, Z.; Li, L.; Ge, X.; Zheng, S. Assembly Characteristics and Experimental Study of Rotor System with Elastic Ring Squeeze Film Damper. J. Mech. Eng. 2023, 59, 118–131. [Google Scholar]
- Li, B.; Cheng, D.; Jiang, Z. Experiment study on dynamic characteristics of elastic ring squeeze film damper rotor system. Gas Turbine Exp. Res. 2015, 28, 19–22. [Google Scholar]
- Nie, W.; Yang, X.; Deng, W.; Tang, H. Vibration Optimization Design and Experiment for Support of Aeroengine High-Speed Rotor System. In International Conference on Mechanical System Dynamics; Springer Nature Singapore: Singapore, 2023; pp. 1413–1424. [Google Scholar]
- Tichy, J.A. Behavior of a squeeze film damper with an electrorheological fluid. Tribol. Trans. 1993, 36, 127–133. [Google Scholar] [CrossRef]
- Jin, M.; Wang, A.; Wang, Q.; Ying, Y.; Heng, X.; Zhang, H. Dynamic characteristics analysis of the complex rotor-blade system for the aero-turboshaft engine. J. Aerosp. Power 2024, 39, 66–82. [Google Scholar] [CrossRef]
- Xing, Y.; Liu, B.; Liu, G. A differential quadrature finite element method. Int. J. Appl. Mech. 2010, 2, 207–227. [Google Scholar] [CrossRef]
- Zhang, H.; Li, Z.; Liu, H.; Liu, T.; Wang, Q. Modeling and Dynamic Analysis of Double-Row Angular Contact Ball Bearing–Rotor–Disk System. Lubricants 2024, 12, 441. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Equivalent Elastic Modulus (Gpa) | Equivalent Density (kg/m3) | Poisson’s Ratio |
|---|---|---|---|
| C1 | 73.80 | 4401.07 | 0.3 |
| C2 | 68.64 | 4347.21 | 0.3 |
| C3 | 72.93 | 4366.70 | 0.3 |
| C4 | 155.76 | 6130.61 | 0.3 |
| C5 | 220.38 | 7906.39 | 0.3 |
| C6 | 211.66 | 7886.85 | 0.3 |
| Order | Parameter | 1A | 2A | 3A | 1C | 1GT | 2GT |
|---|---|---|---|---|---|---|---|
| 1st | Speed (rpm) | 11,250 | 11,200 | 11,200 | 11,200 | 11,200 | 11,200 |
| Amplitude (mm) | 0.076 | 0.100 | 0.101 | 0.125 | 0.140 | 0.143 | |
| 2nd | Speed (rpm) | 23,900 | 23,950 | 23,950 | 24,050 | 23,900 | 23,900 |
| Amplitude (mm) | 1.15 | 0.914 | 0.737 | 0.227 | 0.287 | 0.527 | |
| 3rd | Speed (rpm) | 71,900 | --- | --- | 70,800 | --- | 68,300 |
| Amplitude (mm) | 0.631 | --- | --- | 0.366 | --- | 0.291 |
| Order | Parameter | 0 | 30° | 60° | 90° | 120° | 150° | 180° |
| 1st | Speed (rpm) | 10,950 | 11,050 | 11,200 | 11,200 | 11,200 | 11,250 | 11,300 |
| Amplitude (mm) | 0.265 | 0.257 | 0.236 | 0.204 | 0.163 | 0.124 | 0.104 | |
| 2nd | Speed (rpm) | 23,900 | 24,000 | 24,000 | 23,850 | 23,850 | 23,700 | 23,900 |
| Amplitude (mm) | 0.070 | 0.097 | 0.129 | 0.154 | 0.170 | 0.173 | 0.167 | |
| 3rd | Speed (rpm) | 70,160 | 70,000 | 69,950 | 69,850 | 69,250 | 68,850 | --- |
| Amplitude (mm) | 0.232 | 0.225 | 0.204 | 0.169 | 0.124 | 0.075 | --- |
| Name | 1A | 1C | 2GT | |||
|---|---|---|---|---|---|---|
| Mass | Phase | Mass | Phase | Mass | Phase | |
| UR 1 | 0 | 0 | 12 g | 0° | 0 | 0 |
| UR 2 | 6 g | 0° | 0 | 0 | 6 g | 0° |
| UR 3 | 6 g | 0° | 0 | 0 | 6 g | 180° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Heng, X.; Wang, A.; Liu, T.; Wang, Q.; Liu, K. Analysis of Unbalance Response and Vibration Reduction of an Aeroengine Gas Generator Rotor System. Lubricants 2025, 13, 266. https://doi.org/10.3390/lubricants13060266
Zhang H, Heng X, Wang A, Liu T, Wang Q, Liu K. Analysis of Unbalance Response and Vibration Reduction of an Aeroengine Gas Generator Rotor System. Lubricants. 2025; 13(6):266. https://doi.org/10.3390/lubricants13060266
Chicago/Turabian StyleZhang, Haibiao, Xing Heng, Ailun Wang, Tao Liu, Qingshan Wang, and Kun Liu. 2025. "Analysis of Unbalance Response and Vibration Reduction of an Aeroengine Gas Generator Rotor System" Lubricants 13, no. 6: 266. https://doi.org/10.3390/lubricants13060266
APA StyleZhang, H., Heng, X., Wang, A., Liu, T., Wang, Q., & Liu, K. (2025). Analysis of Unbalance Response and Vibration Reduction of an Aeroengine Gas Generator Rotor System. Lubricants, 13(6), 266. https://doi.org/10.3390/lubricants13060266