Discussion on the Non-Linear Stability of Short Hydrodynamic Bearings by Applying Rabinowitsch Fluid Model


Abstract
1. Introduction
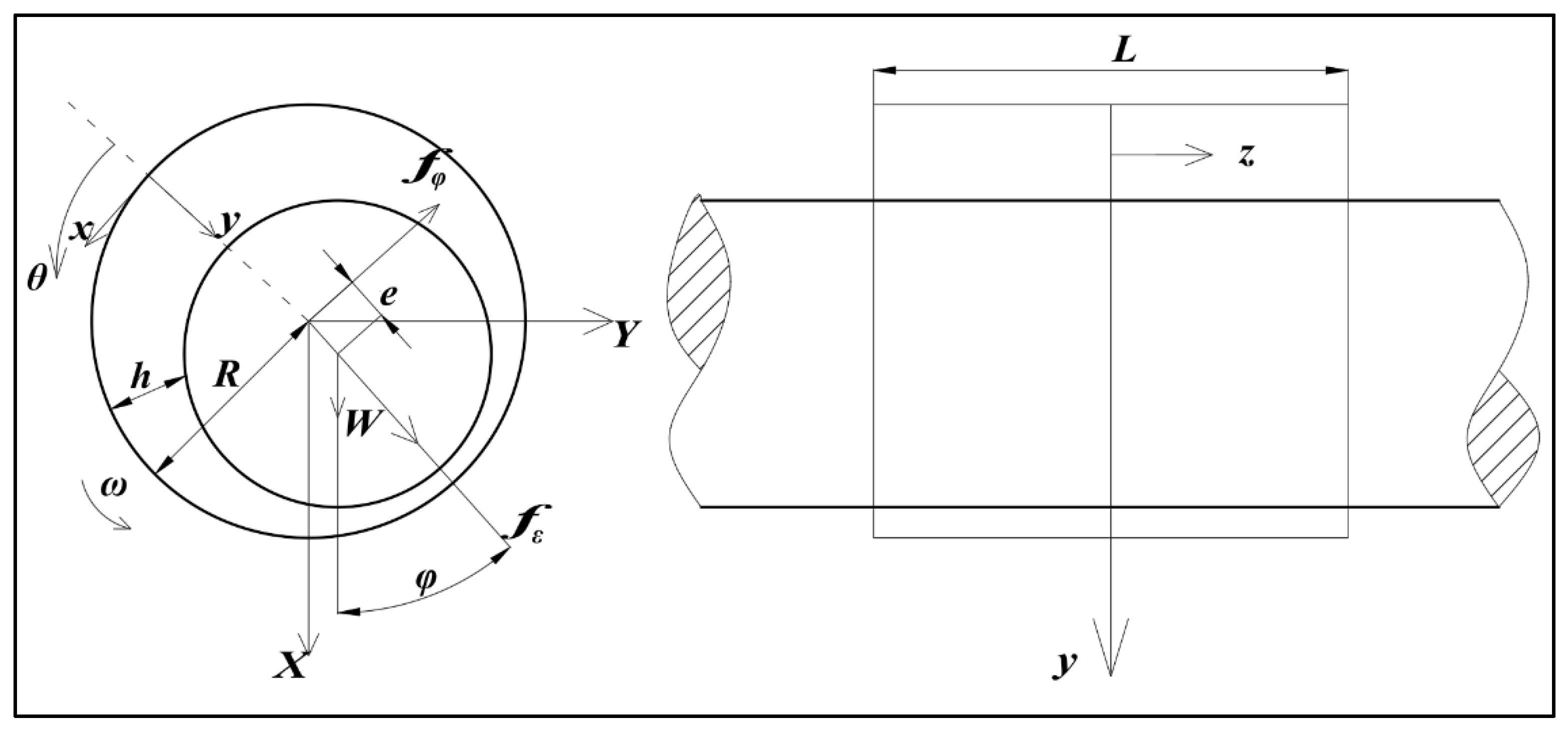
2. Theoretical Analysis
- (1)
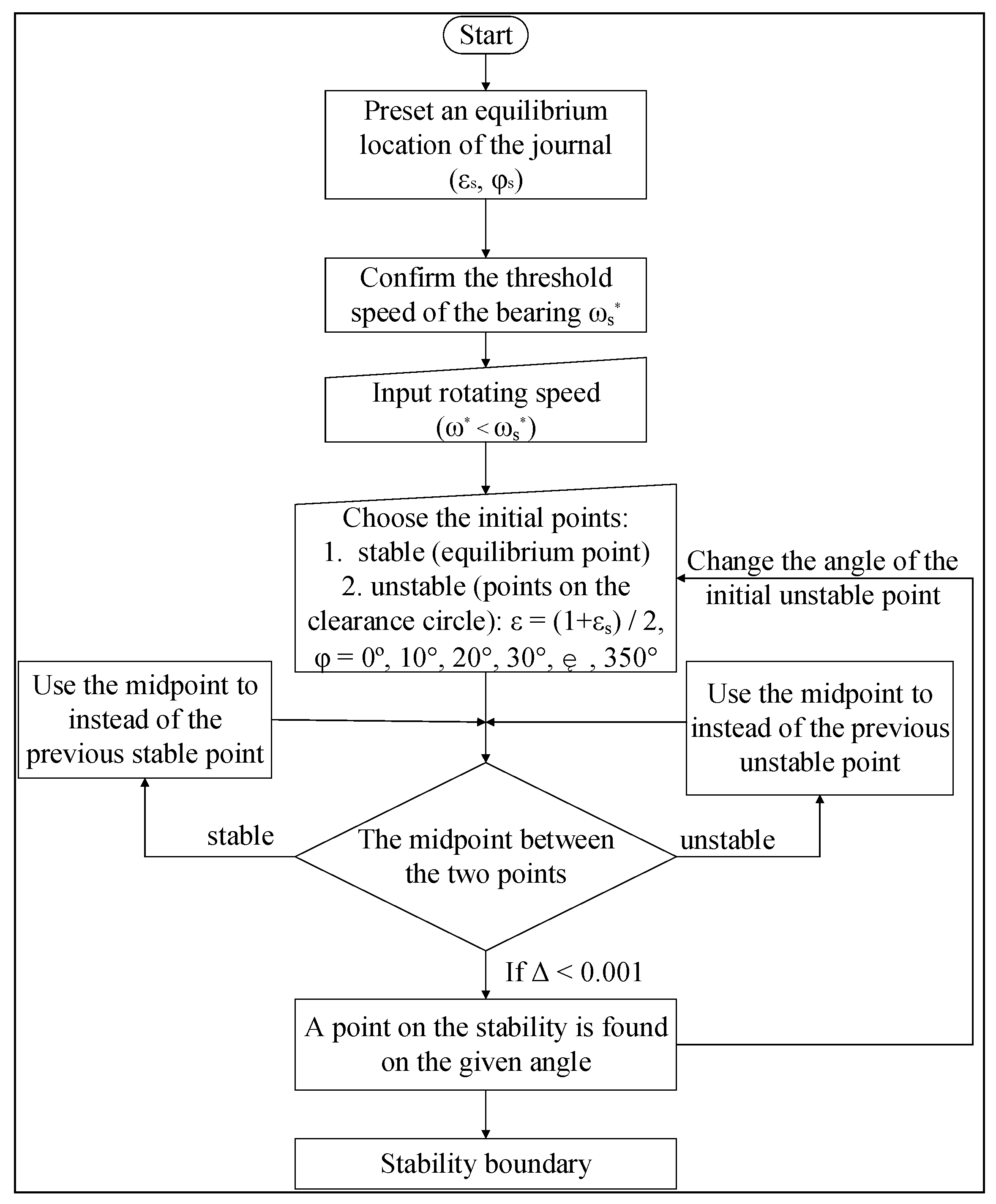
- From Equation (11), an equilibrium location of the journal center could be preset.
- (2)
- For the given location of the journal center, substituting the position coordinates into Equation (24), the threshold speed of the hydrodynamic bearing at the given equilibrium location could be obtained.
- (3)
- Choosing a rotating speed less than the threshold speed and an initial location of the journal center, to confirm the stability boundary more conveniently, the initial location of the journal center is chosen as follows:
- (a)
- Set the line connecting the bearing center and equilibrium location of the journal center as the starting line, dividing the clearance circle into n parts (generally, the value of n is 36. To make the results more accurate, the value of n could be larger. To shorten the calculation process, the value of n could be smaller. We confirm that the value of n should be larger than 9). Here, n = 36, and 36 points on the clearance circle is found. The eccentricity ratios of all the points are 1, and the attitude angles of these points are 0°, 10°, 20° … 350°.
- (b)
- First, choose the location ε = (1 + εs)/2, φ = 0° as the initial point of the journal center. With Equations (9), (10) and (14)–(16), applying the fourth-order Runge–Kutta method, the trajectory of the journal center could be obtained.
- (c)
- If the journal center gradually gets close to the bearing surface, choose the middle point between this point and the equilibrium location as the next point.
- (d)
- If the journal center gradually gets close to the equilibrium location, choose the middle point between this point and the last initial location as the next point.
- (e)
- With the location of new point, repeat the steps (b) to (d), until the difference between eccentricity ratios of two continuity points is less than 0.001. Then, choose one of these two points, and this point is the point on the stability boundary with the attitude angle of 0°.
- (f)
- Choosing the location ε = 1, φ = 10° as the initial point of the journal center and repeating the steps (b) to (e), the point on the stability boundary with the attitude angles of 10° is found. Continuing to repeat the steps (b) to (e), the points on the stability boundary with the attitude angles of 20°, 30°, …, and 350° are found.
- (4)
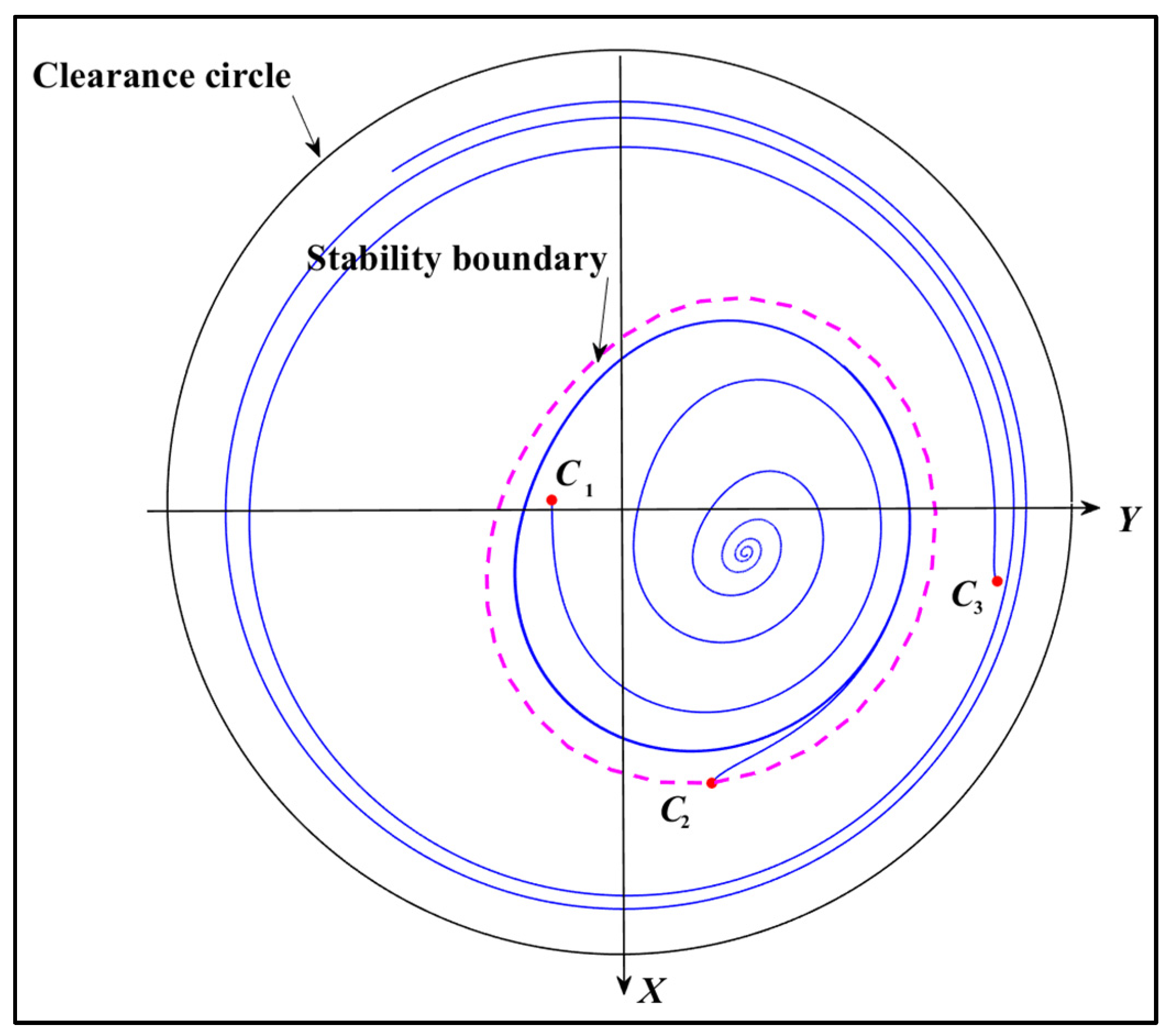
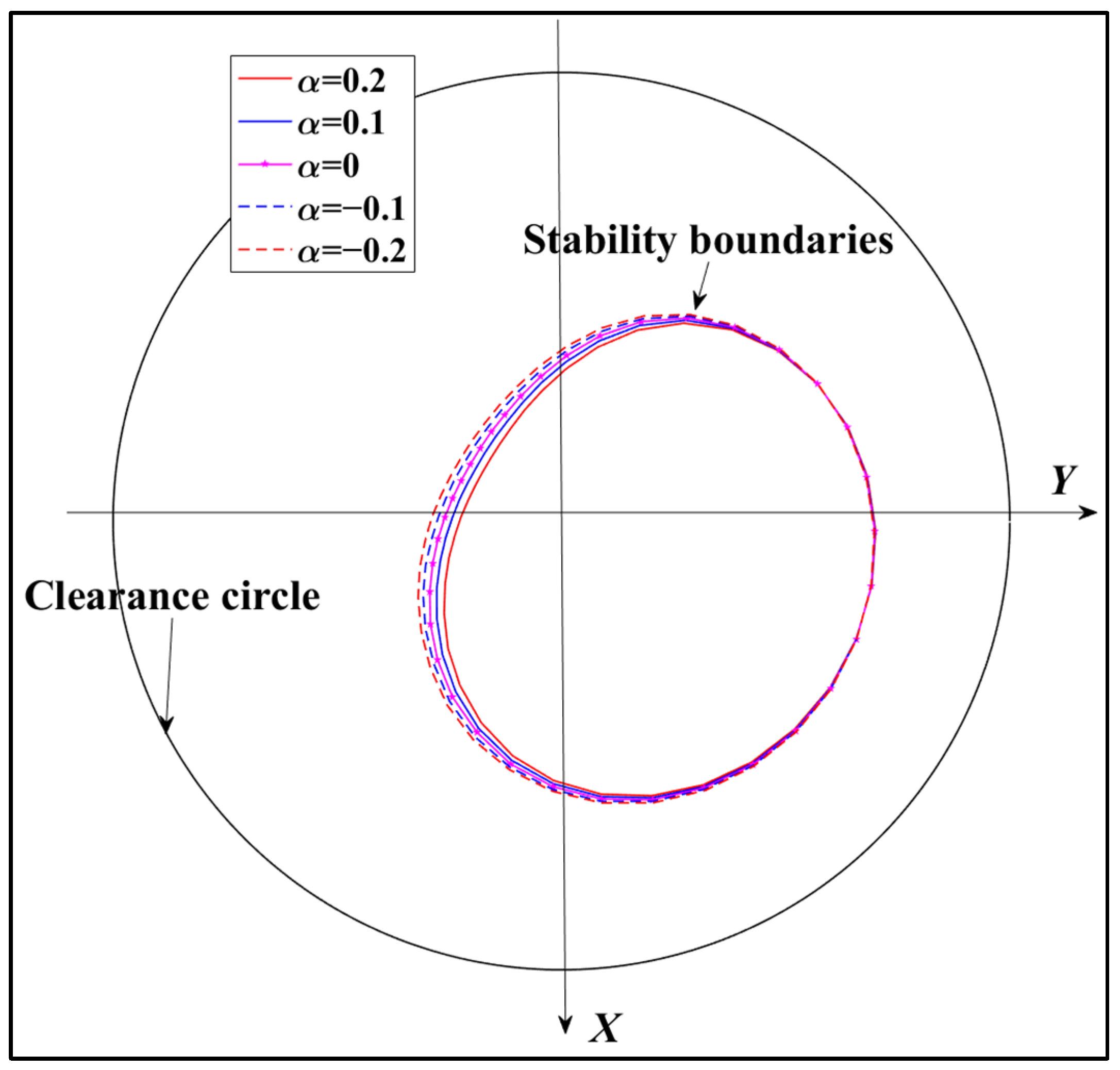
- After the 36 points on the stability boundary are confirmed, connect these points with a smooth curve, and the stability boundary of the hydrodynamic bearing with the given equilibrium location is obtained.
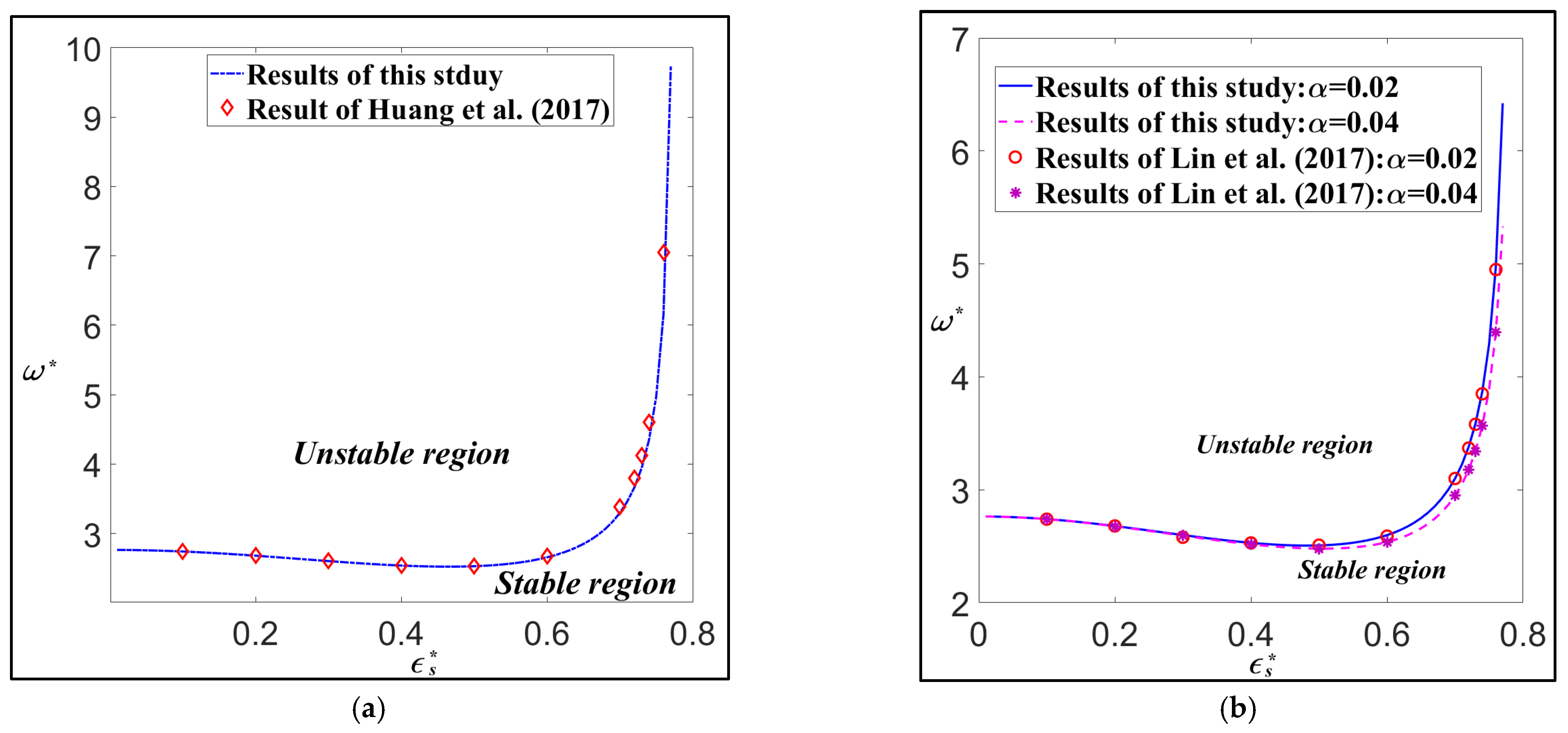
3. Verification of the Results
4. Results and Discussions
5. Conclusions
- (1)
- A non-linear stability boundary exists for short journal bearings within the clearance circle. The trajectory of the journal center, starting outside this boundary, becomes unstable, and even the rotating speed is below the threshold speed. The threshold speed of hydrodynamic bearings with pseudo-plastic lubricants (α > 0) is higher than that of bearings with Newtonian lubricants (α = 0). And the threshold speed of bearings with Newtonian lubricants is higher than that of bearings with pseudo-plastic lubricants (α > 0).
- (2)
- The non-linear stability region of bearings lubricated with pseudo-plastic lubricants (α > 0) is smaller than that of bearings lubricated with Newtonian lubricants (α = 0). The non-linear stability region of bearings with dilatant lubricants (α < 0) is larger than that of bearings lubricated with Newtonian lubricants (α = 0). The bearing using lubricants with a higher non-Newtonian factor exhibits a smaller non-linear stability boundary.
- (3)
- Generally, a larger stability region and a higher threshold speed indicate the better stability of the hydrodynamic bearing, and the non-linear stability of bearings is affected by the lubricant. For the three kinds of lubricants discussed in this study, in the hydrodynamic bearing with a lubricant with the smaller value of the non-Newtonian factor, the stability of the bearing is better. Thus, it is confirmed that the choice of a more appropriate lubricant can enhance the stability of bearings. The results in this study provide engineers with greater flexibility in the practical design of hydrodynamic bearings.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Nomenclature | ω | rotation speed of shaft: rad/s | |
| θ | angular coordinate, rad | ||
| C | radial clearance, mm | ε | eccentricity ratio, e/c |
| D | journal diameter, mm | Non-dimensional parameters | |
| e | journal eccentricity, mm | ||
| fε | fluid film reaction component on the eccentric direction, N | non-dimensional stiffness and damping coefficients, i, j = X, Y | |
| fφ | fluid film reaction component perpendicular to the eccentric direction, N | h* = | h/c |
| FX | fluid film reaction component on X direction, N | α = | k(μRω/C)2 |
| FY | fluid film reaction component on Y direction, N | p* = | pC2/μωR2 |
| h | film thickness, mm | ω* = | ω(W/mC)1/2 |
| L | bearing length, mm | = | non-dimensional stability threshold speed |
| k | non-Newtonian factor, mm4·N−2 | = | non-dimensional second threshold speed |
| m | mass of rotor per each bearing, kg | S = | μωRL3/(2WC2) |
| p | pressure, N·mm−2 | z* = | 2z/L |
| R | radius of journal, mm | fε* = | Fε/(SW) |
| t | time, s | fφ* = | Fφ/(SW) |
| W | external load, N | FX* = | FX/(SW) |
| X, Y, Z | Cartesian coordinates | FY* = | FY/(SW) |
| x | coordinate of circumferential direction, mm | Subscripts and superscripts | |
| y | coordinate of the eccentric direction, mm | ||
| z | coordinate of axial direction, mm | s | stability state |
| Greek symbols | ε | component on eccentric direction | |
| φ | component perpendicular to eccentric direction | ||
| φ | attitude angle, rad | * | non-dimensional parameter |
| μ | viscosity of zero shear rate, N·s·m−2 | . | first derivative with respect to time |
| γ | shear strain | .. | second derivative with respect to time |
Appendix A
References
- Hollis, P.; Taylor, D.L. Hopf Bifurcation to Limit Cycles in Fluid Film Bearings. J. Tribol. 1986, 108, 184–189. [Google Scholar] [CrossRef]
- Crooijmans, M.T.M.; Brouwers, H.J.H.; van Campen, D.H.; De Kraker, A. Limit Cycle Predictions of a Nonlinear Journal-Bearing System. J. Eng. Ind. 1990, 112, 168–171. [Google Scholar] [CrossRef]
- Wang, J.K.; Khonsari, M.M. Prediction of the stability envelope of rotor-bearing system. J. Vib. Acoust. 2006, 128, 197. [Google Scholar] [CrossRef]
- Lin, J.R. The surface roughness effects of transverse patterns on the Hopf bifurcation behaviors of short journal bearings. Ind. Lubr. Tribol. 2012, 64, 265–270. [Google Scholar] [CrossRef]
- Lin, J.R. Application of the Hopf bifurcation theory to limit cycle prediction of short journal bearings with isotropic roughness effects. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2007, 221, 869–879. [Google Scholar] [CrossRef]
- Lin, J.R. The influences of longitudinal surface roughness on sub-critical and super-critical limit cycles of short journal bearings. Appl. Math. Model. 2014, 38, 392–402. [Google Scholar] [CrossRef]
- Khonsari, M.M.; Chang, Y.J. Stability boundary of non-linear orbits within clearance circle of journal bearings. J. Vib. Acoust. 1993, 115, 303–307. [Google Scholar] [CrossRef]
- Wang, J.K.; Khonsari, M.M. A new derivation for journal bearing stiffness and damping coefficients in polar coordinates. J. Sound Vib. 2006, 290, 500–507. [Google Scholar] [CrossRef]
- Amamou, A.; Chouchane, M. Nonlinear stability analysis of long hydrodynamic journal bearings using numerical continuation. Mech. Mach. Theory 2014, 72, 17–24. [Google Scholar] [CrossRef]
- Huang, Y.; Tian, Z.; Chen, R.; Cao, H. A simpler method to calculate instability threshold speed of hydrodynamic journal bearings. Mech. Mach. Theory 2017, 108, 209–216. [Google Scholar] [CrossRef]
- Tian, Z.; Huang, Y. Transformation between polar and rectangular coordinates of stiffness and dampness parameters in hydrodynamic journal bearings. Friction 2021, 9, 201–206. [Google Scholar] [CrossRef]
- Dyk, Š.; Rendl, J.; Byrtus, M.; Smolík, L. Dynamic coefficients and stability analysis of finite-length journal bearings considering approximate analytical solutions of the Reynolds equation. Tribol. Int. 2019, 130, 229–244. [Google Scholar] [CrossRef]
- El-Sayed, T.A.; Sayed, H. Bifurcation analysis of rotor/bearing system using third-order journal bearing stiffness and damping coefficients. Nonlinear Dyn. 2022, 107, 123–151. [Google Scholar] [CrossRef]
- Lin, C.; Jian, F.; Sun, S.; Sima, C.; Qi, L.; Zou, M. Analysis of nonlinear time-domain lubrication characteristics of the hydrodynamic journal bearing system. Lubricants 2023, 11, 145. [Google Scholar] [CrossRef]
- Huang, Y.; Cao, H.; Tian, Z. Stability analysis of long hydrodynamic journal bearings based on the journal center trajectory. Friction 2021, 9, 1776–1783. [Google Scholar] [CrossRef]
- Mao, Y.; Li, L.; Li, D.; Zheng, J. Analysis of the turbulent lubrication of a textured hydrodynamic journal bearing. Lubricants 2023, 11, 362. [Google Scholar] [CrossRef]
- Dakel, M.; Baguet, S.; Dufour, R. Nonlinear dynamics of a support-excited flexible rotor with hydrodynamic journal bearings. J. Sound Vib. 2014, 333, 2774–2799. [Google Scholar] [CrossRef]
- Miraskari, M.; Hemmati, F.; Gadala, M.S. Nonlinear dynamics of flexible rotors supported on journal bearings—Part I: Analytical bearing model. J. Tribol. 2018, 140, 021704. [Google Scholar] [CrossRef]
- Miraskari, M.; Hemmati, F.; Gadala, M.S. Nonlinear dynamics of flexible rotors supported on journal bearings—Part II: Numerical bearing model. J. Tribol. 2018, 140, 021705. [Google Scholar] [CrossRef]
- Machado, T.H.; Alves, D.S.; Cavalca, K.L. Discussion about nonlinear boundaries for hydrodynamic forces in journal bearing. Nonlinear Dyn. 2018, 92, 2005–2022. [Google Scholar] [CrossRef]
- Swamy, S.T.N.; Prabhu, B.S.; Rao, B.V.A. Stiffness and damping characteristics of finite width journal bearings with a non-Newtonian film and their application to instability prediction. Wear 1975, 32, 379–390. [Google Scholar] [CrossRef]
- Swamy, S.T.N. The influence of non-Newtonian oil film short journal bearings on the stability of a rigid rotor. Wear 1977, 43, 155–164. [Google Scholar] [CrossRef]
- Lin, J.R.; Li, P.J.; Hung, T.C.; Liang, L.J. Nonlinear stability boundary of journal bearing systems operating with non-Newtonian couple stress fluids. Tribol. Int. 2014, 71, 114–119. [Google Scholar] [CrossRef]
- Lu, H.; Tian, Z. Investigation of the static performance of hydrostatic thrust bearings considering non-Gaussian surface topography. Lubricants 2023, 11, 267. [Google Scholar] [CrossRef]
- Walicka, A.; Walicki, E.; Jurczak, P.; Falicki, J. Thrust bearing with rough surfaces lubricated by an Ellis fluid. Int. J. Appl. Mech. Eng. 2014, 19, 809–822. [Google Scholar] [CrossRef]
- Wada, S.; Hayashi, H. Hydrodynamic lubrication of journal bearings by pseudo-plastic lubricants: Part 1, theoretical studies. Bull. JSME 1971, 14, 268–278. [Google Scholar] [CrossRef]
- Wada, S.; Hayashi, H. Hydrodynamic lubrication of journal bearings by pseudo-plastic lubricants: Part 2, experimental studies. Bull. JSME 1971, 14, 279–286. [Google Scholar] [CrossRef]
- Lin, J.R.; Hung, T.C.; Lin, C.H. Linear stability analysis of journal bearings lubricated with a non-Newtonian Rabinowitsch fluid. J. Mech. 2017, 35, 107–112. [Google Scholar] [CrossRef]
- Tian, Z.; Chen, R. A derivation of stiffness and damping coefficients for short hydrodynamic journal bearings with pseudo-plastic lubricants. J. Mech. 2020, 36, 943–953. [Google Scholar] [CrossRef]
- Sharma, S.C.; Yadav, S.K. Performance of hydrostatic circular thrust pad bearing operating with Rabinowitsch fluid model. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2013, 227, 1272–1284. [Google Scholar] [CrossRef]
- Singh, U.P.; Gupta, R.S.; Kapur, V.K. On the steady performance of hydrostatic thrust bearing: Rabinowitsch fluid model. Tribol. Trans. 2011, 54, 723–729. [Google Scholar] [CrossRef]
- Singh, U.P.; Gupta, R.S.; Kapur, V.K. On the application of Rabinowitsch fluid model on an annular ring hydrostatic thrust bearing. Tribol. Int. 2013, 58, 65–70. [Google Scholar] [CrossRef]
- Lin, J.R. Non-Newtonian effects on the dynamic characteristics of one-dimensional slider bearings: Rabinowitsch fluid model. Tribol. Lett. 2001, 10, 237–243. [Google Scholar] [CrossRef]
- Lin, J.R.; Chu, L.M.; Hung, T.C.; Wang, P.Y. Derivation of two-dimensional non-Newtonian Reynolds equation and application to power-law film slider bearings: Rabinowitsch fluid model. Appl. Math. Model. 2016, 40, 8832–8841. [Google Scholar] [CrossRef]
- Sommerfeld, A. Zürhydrodynamischen theorie der schmiermittelreibung. Z. Math. Phys. 1904, 50, 155. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Additives (%) | T (°C) | k (10−6 m4/N2) |
|---|---|---|
| 0.3 | 30 | 8.06 |
| 1.0 | 30 | 4.43 |
| 2.0 | 30 | 4.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, H.; Cheng, C.; Tian, Z. Discussion on the Non-Linear Stability of Short Hydrodynamic Bearings by Applying Rabinowitsch Fluid Model. Lubricants 2025, 13, 194. https://doi.org/10.3390/lubricants13050194
Lu H, Cheng C, Tian Z. Discussion on the Non-Linear Stability of Short Hydrodynamic Bearings by Applying Rabinowitsch Fluid Model. Lubricants. 2025; 13(5):194. https://doi.org/10.3390/lubricants13050194
Chicago/Turabian StyleLu, Huaiqing, Chunyan Cheng, and Zhuxin Tian. 2025. "Discussion on the Non-Linear Stability of Short Hydrodynamic Bearings by Applying Rabinowitsch Fluid Model" Lubricants 13, no. 5: 194. https://doi.org/10.3390/lubricants13050194
APA StyleLu, H., Cheng, C., & Tian, Z. (2025). Discussion on the Non-Linear Stability of Short Hydrodynamic Bearings by Applying Rabinowitsch Fluid Model. Lubricants, 13(5), 194. https://doi.org/10.3390/lubricants13050194