Tilting-Pad Bearings—The Contact Flexibility of the Pivot


Abstract
1. Introduction
2. Literature Survey
2.1. Research on Pivot Flexibility
2.2. Rough Surface Research
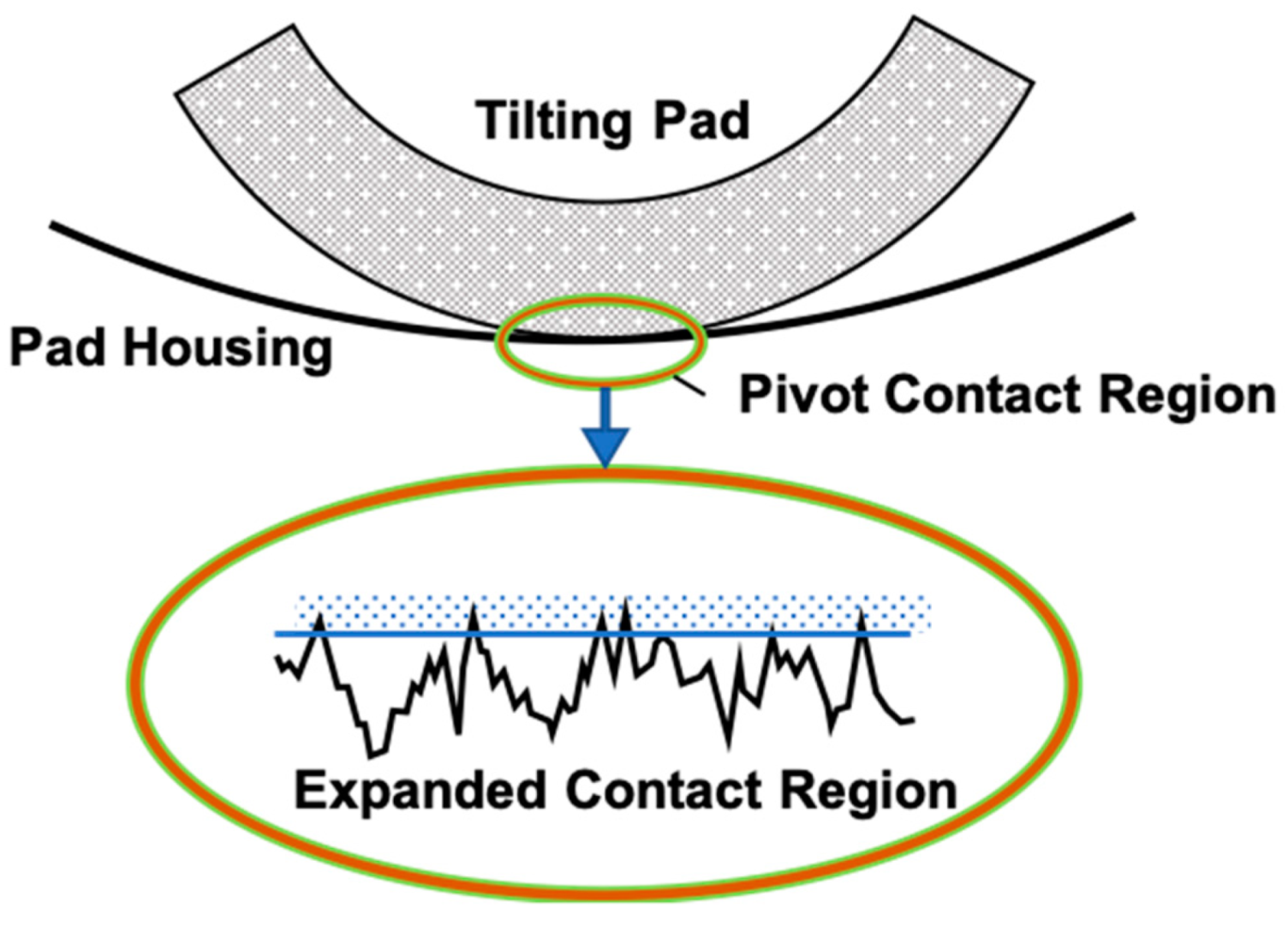
3. Modeling the Pivot Line Contact
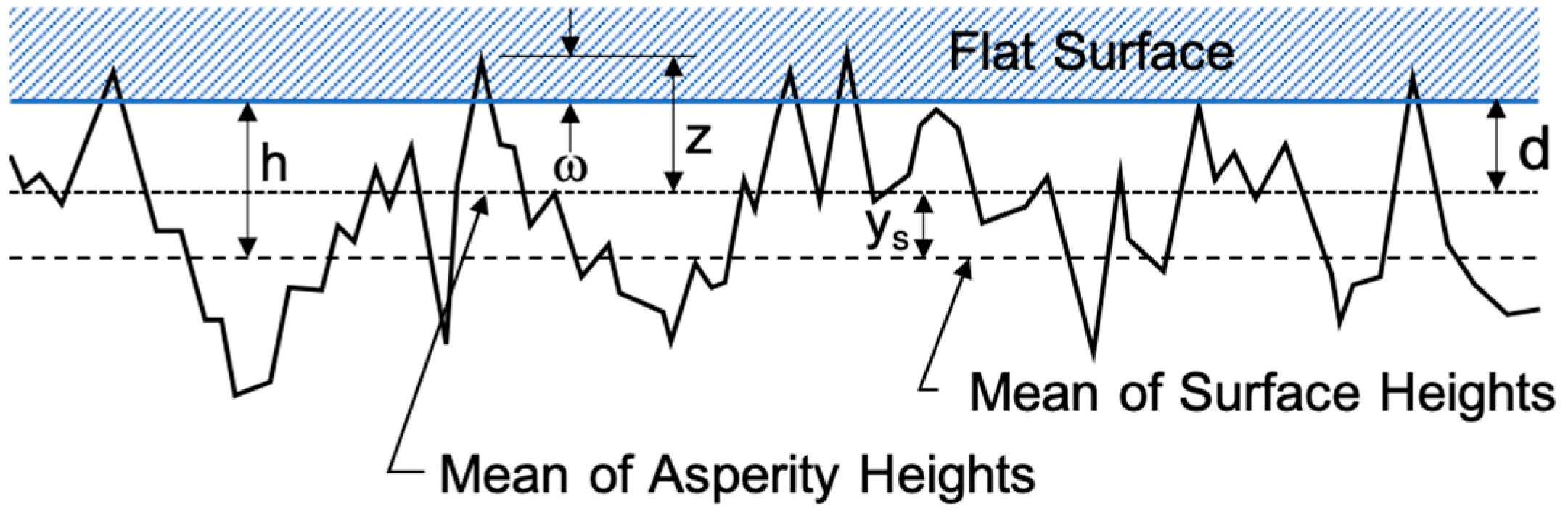
3.1. Contact of Two Flat Rough Surfaces
- (a)
- the elastic modulus E,
- (b)
- Poisson’s ratio ν, and
- (c)
- the yield stress Sy,
- (d)
- the standard deviation σ of the asperity peak height,
- (e)
- the radius value β assigned to the tip of each asperity, and
- (f)
- the density of the peaks η (the number of peaks per unit area).
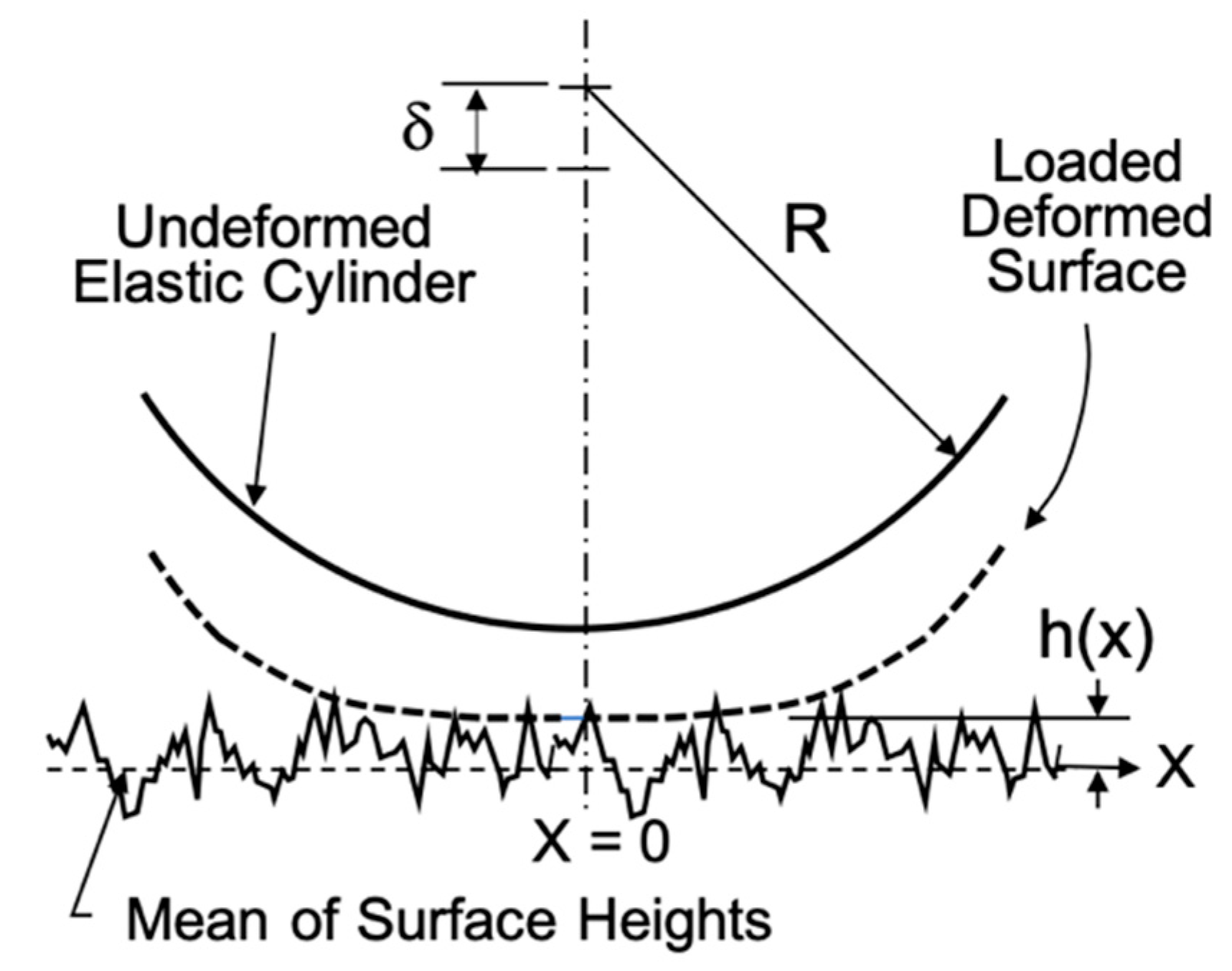
3.2. Application of the Theory to Line Contacts
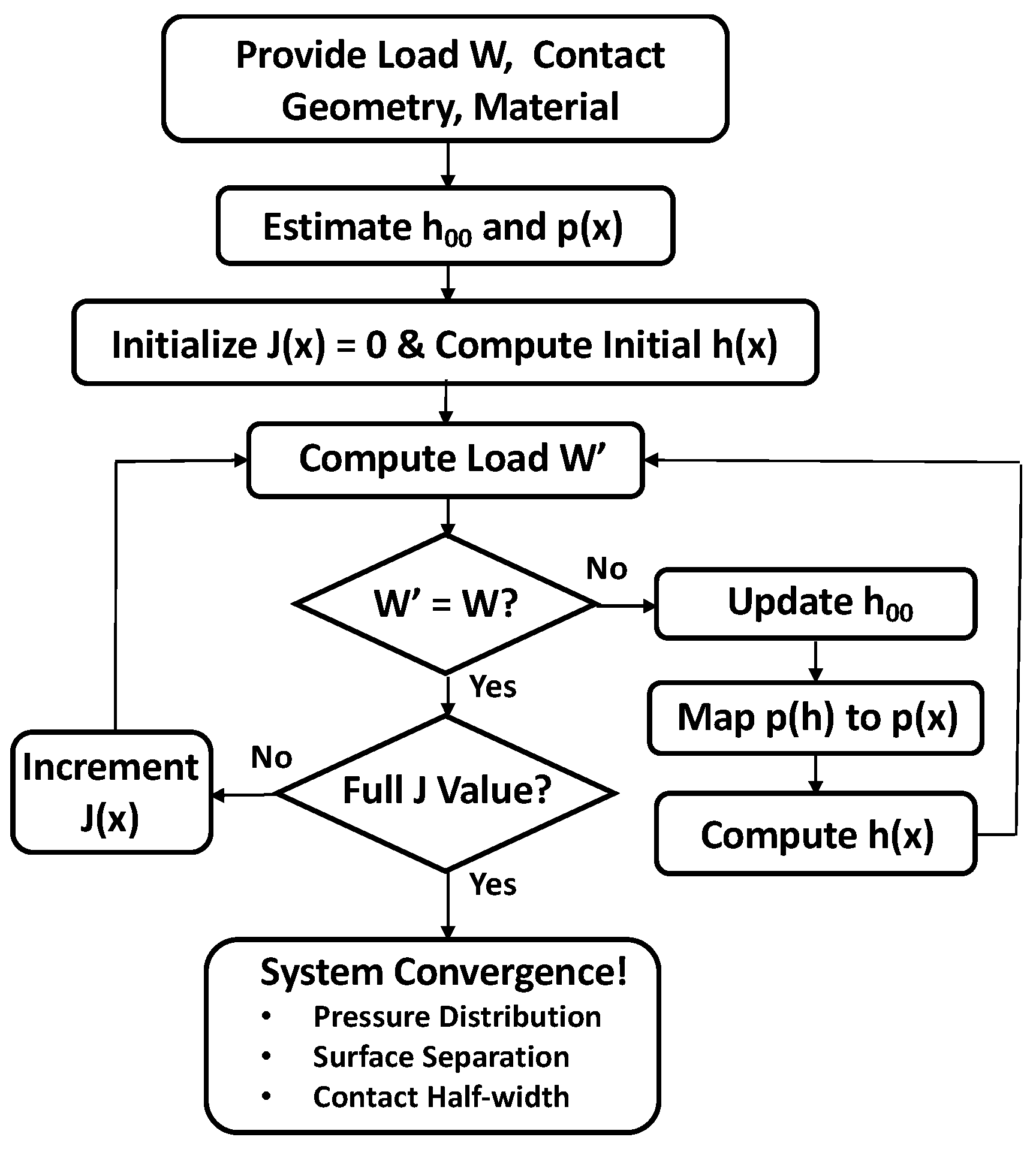
3.3. Contact Compliance and Stiffness
3.4. Surface Parameter Identification
4. Comparison to Experiment
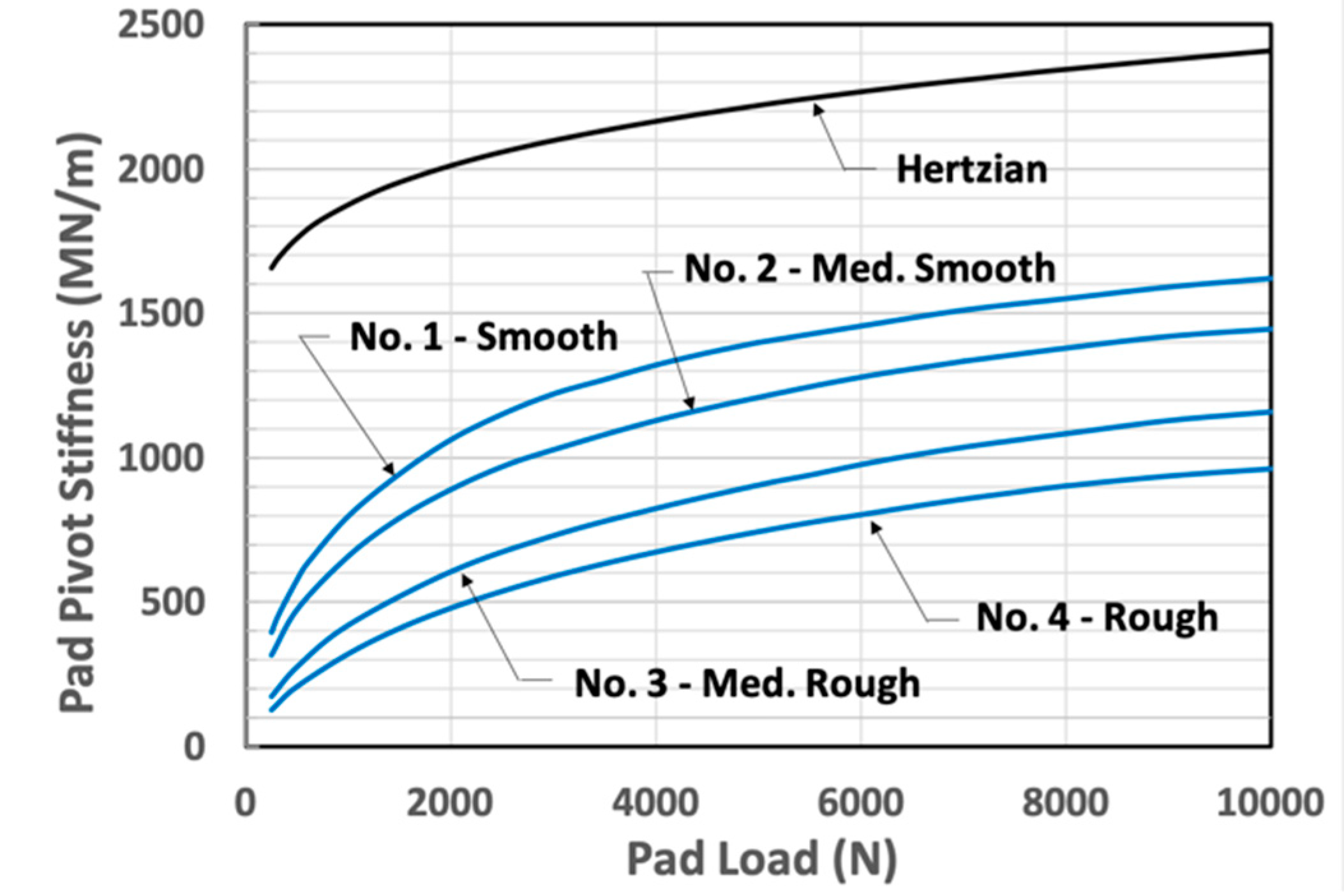
4.1. Individual Pad Pivot Stiffness
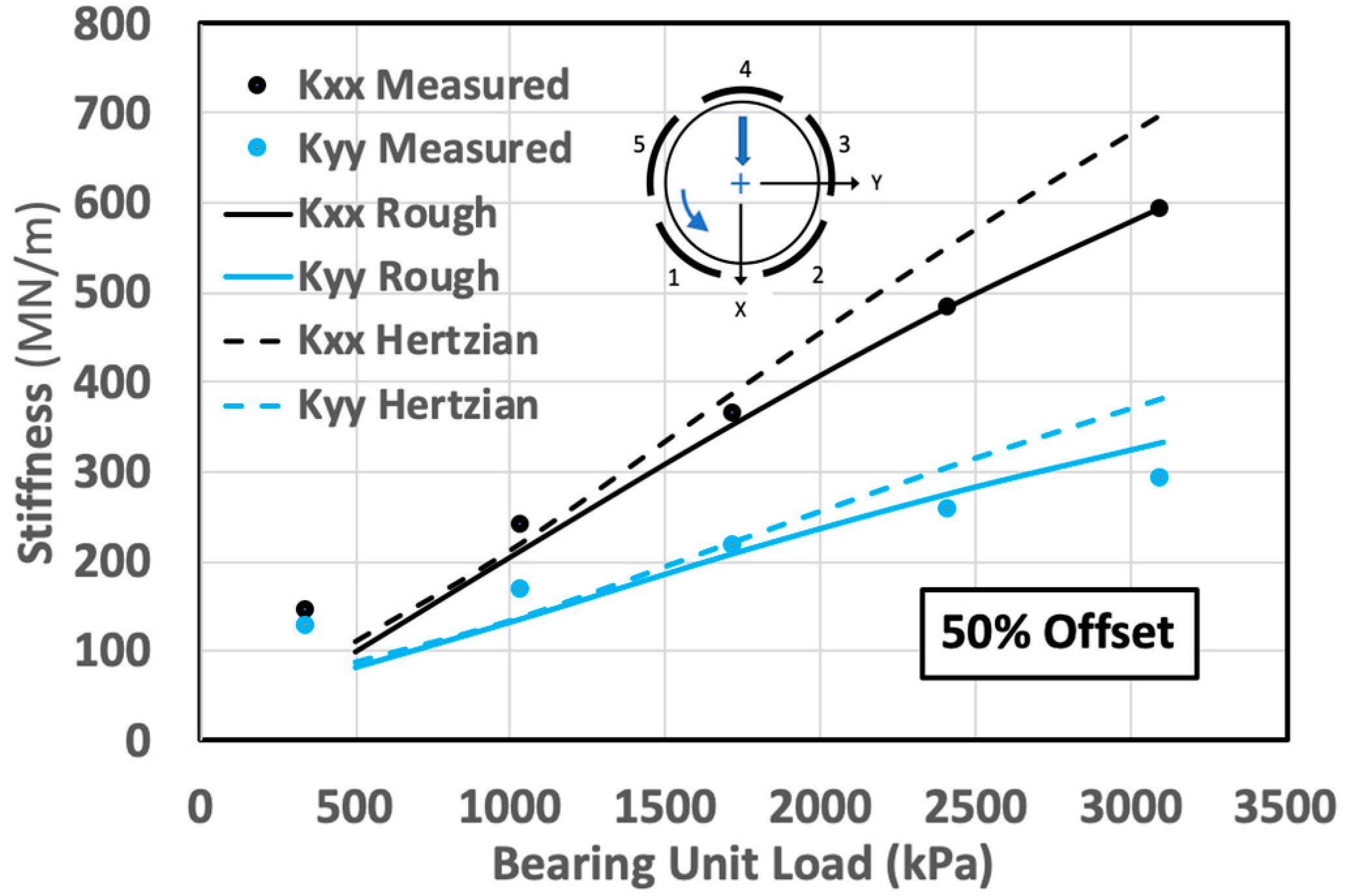
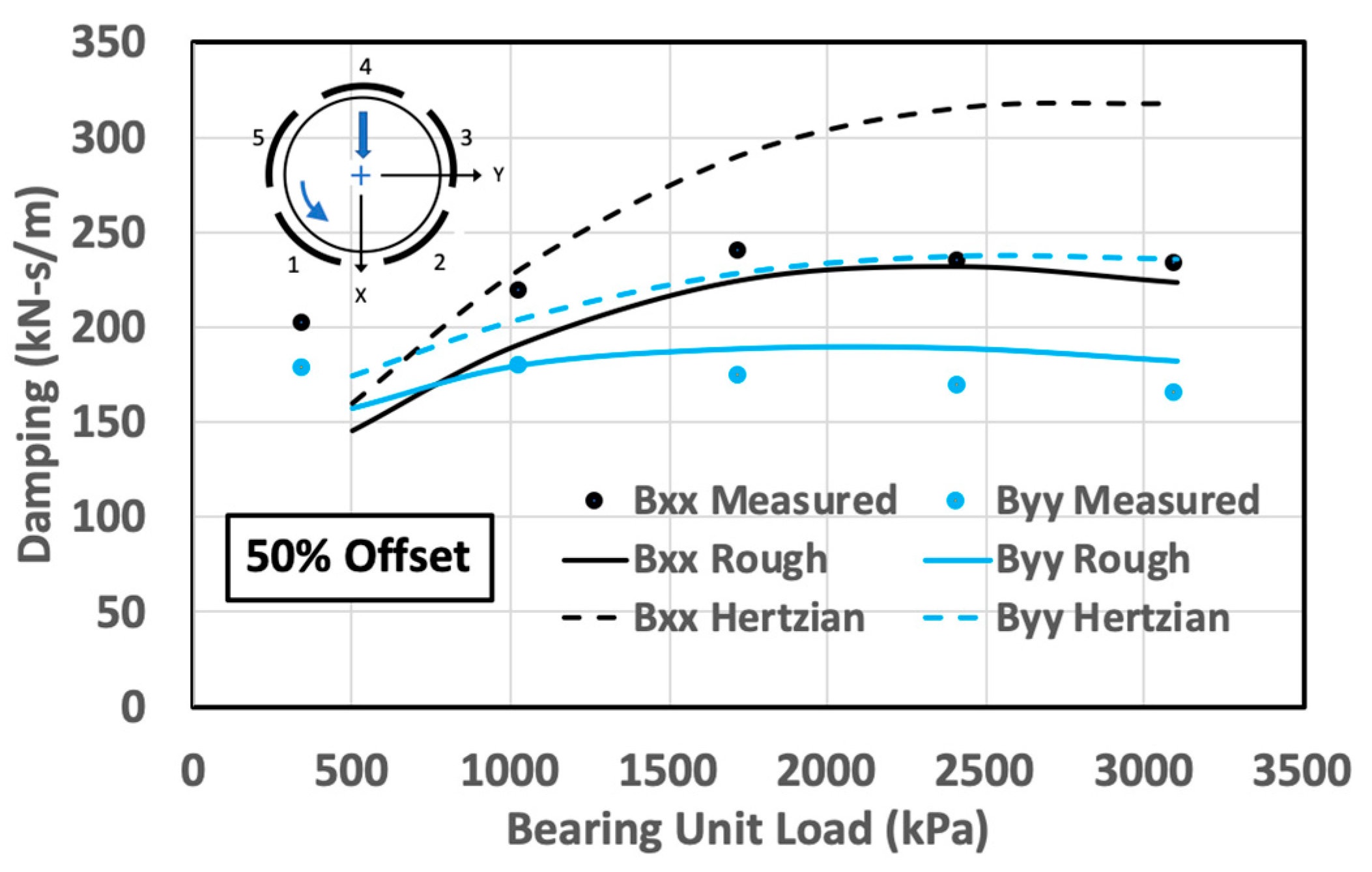
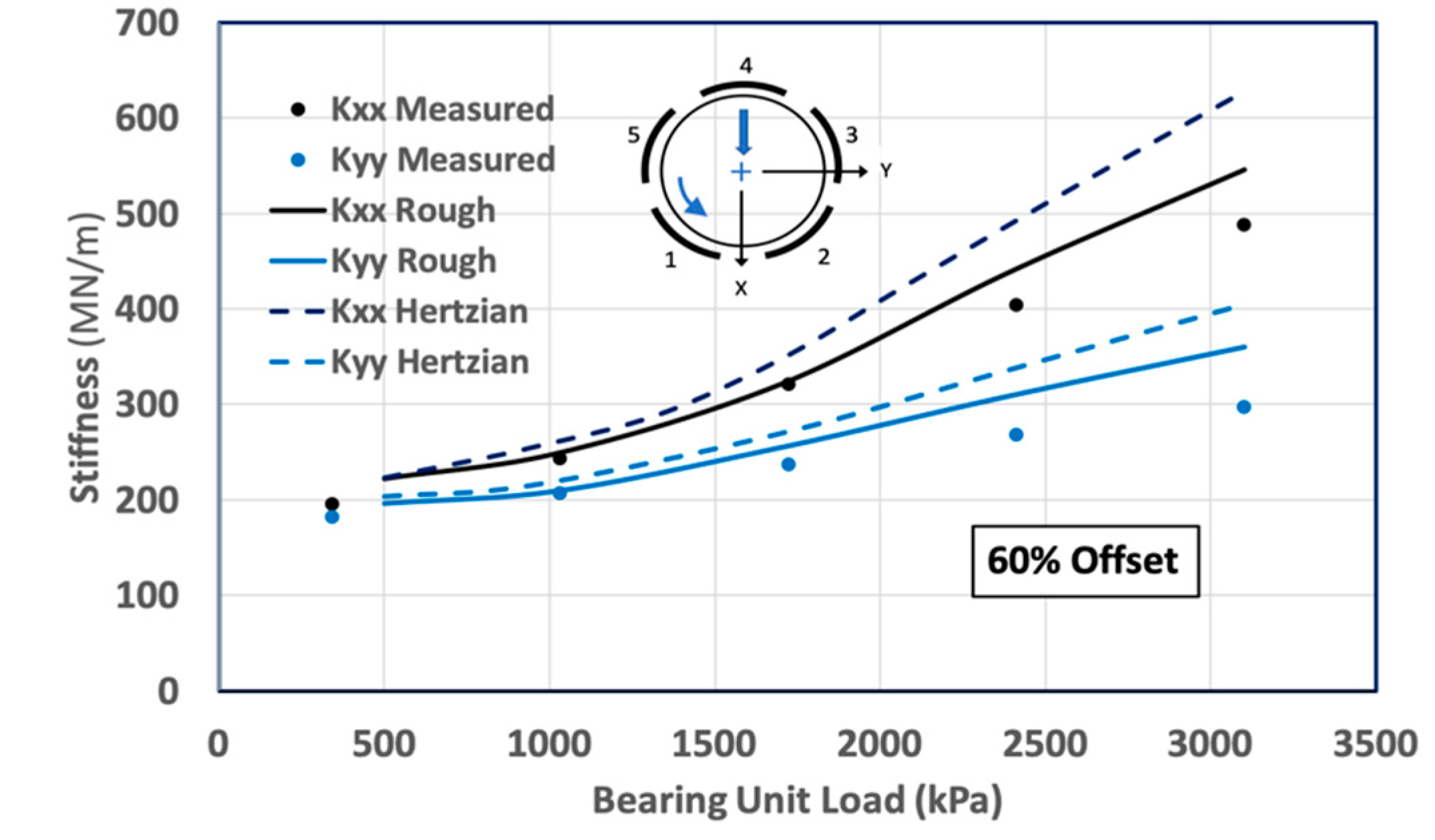
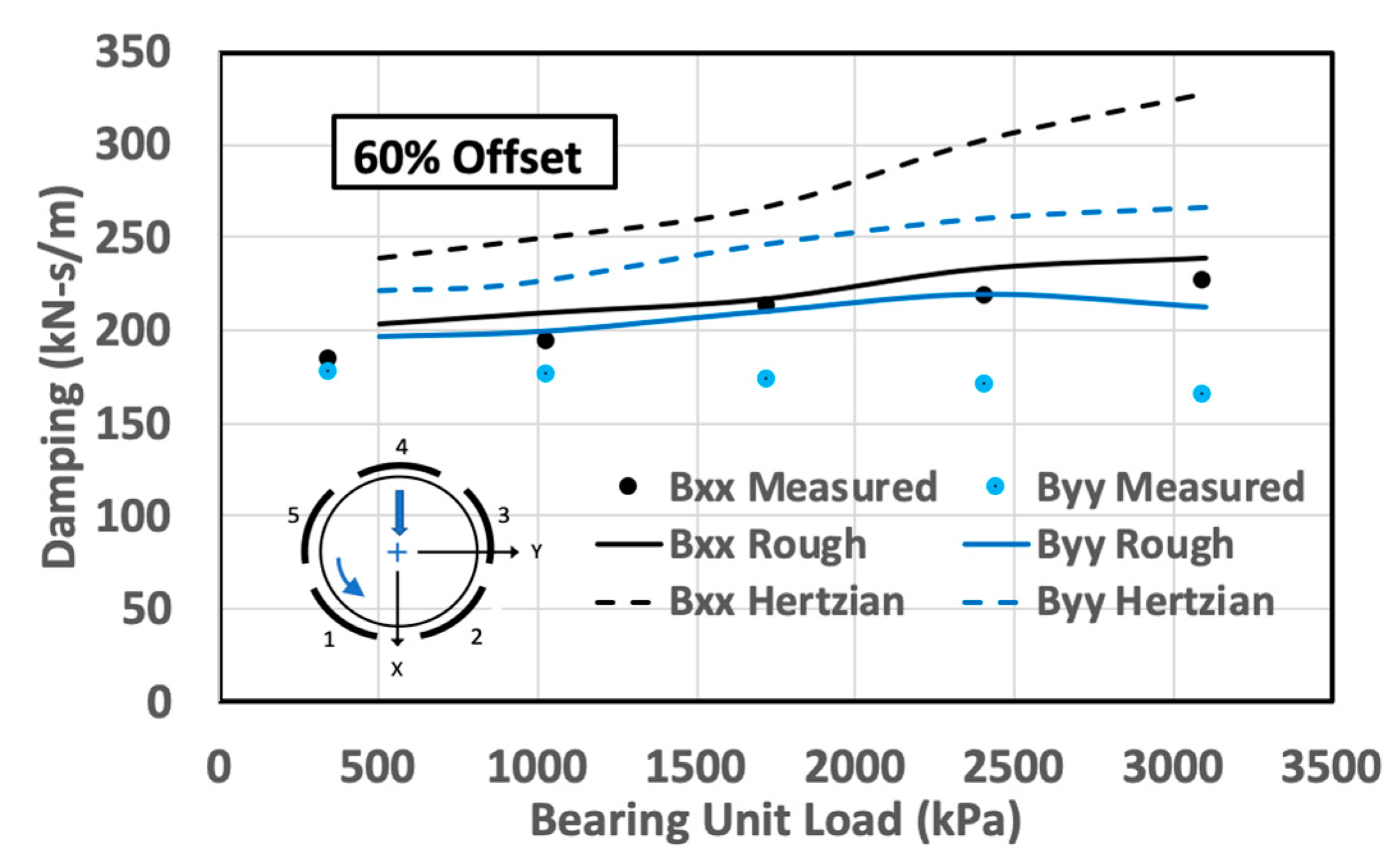
4.2. Complete Bearing Properties
5. Discussion
6. Conclusions
- The Hertz formula for stiffness, traditionally used for pivot stiffness determinations, has been shown to greatly overestimate pivot stiffness, particularly for line contacts.
- The computed dynamic coefficient results for a complete TPJB, using rough surface pivot stiffness values, show a significant improvement relative to the results based on the Hertzian pivot stiffnesses.
- The inclusion of pivot stiffness in TPJB calculations requires a method that considers the individual pad parameters, such as the “pad assembly method” or the “KC method”.
- Either an increase in the surface smoothness or an increase in the pad loading will cause an increase in the pivot contact stiffness.
- All the machined surfaces over the nominal contact area are “rough” on a microscopic scale, such that the actual support area is less than the nominal. This actual contact area is primarily composed of the asperity tips.
- The deformations causing the pivot flexibility are related to both the asperities and the bulk deformations of the bodies supporting the asperities.
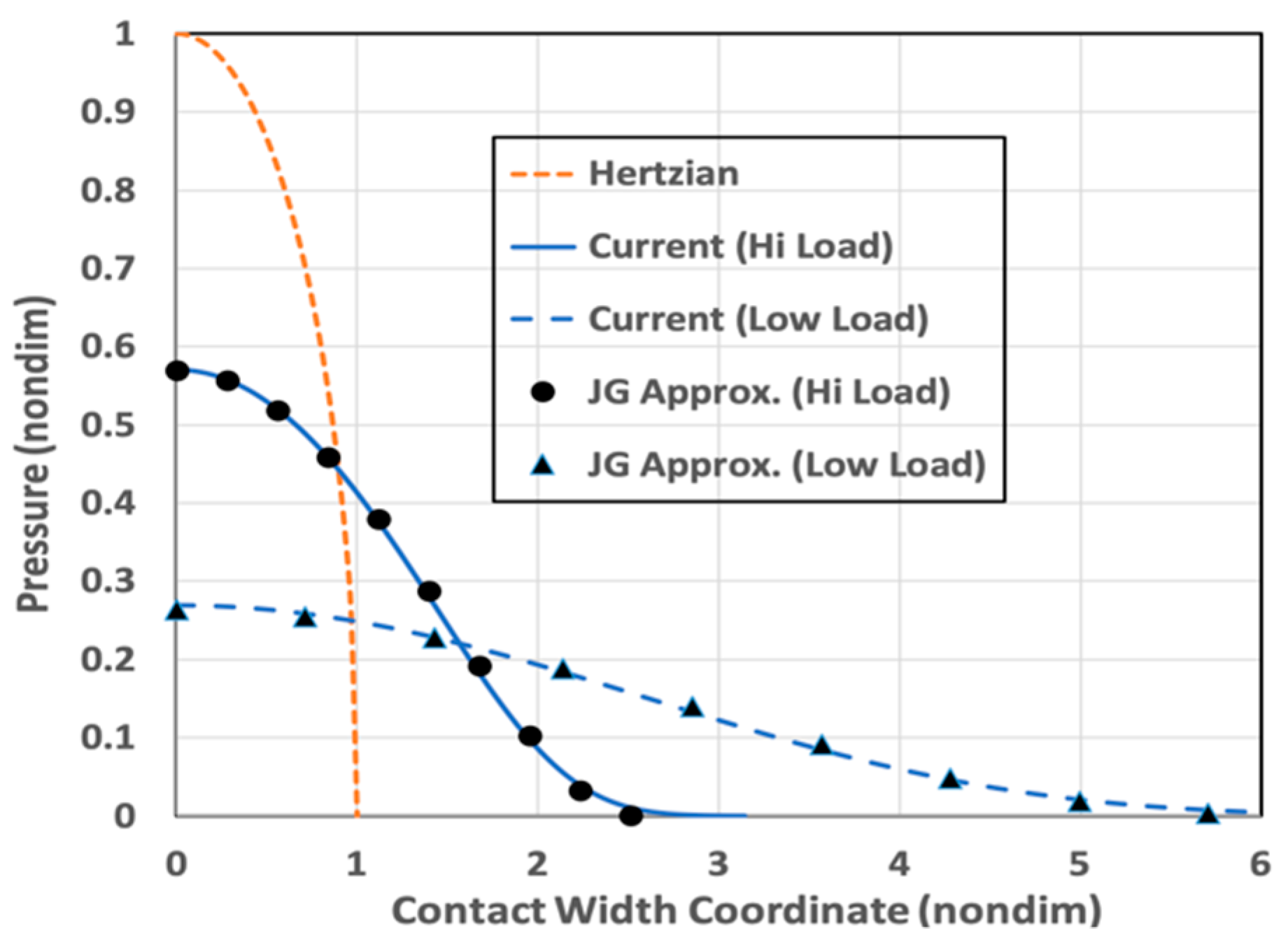
- The maximum statistical pressure for smooth surfaces is greater than that for rough surfaces, and it is closer to the Hertzian result. This trend also holds as the load is increased. Additionally, the contact area, relative to the Hertzian contact, becomes smaller for smoother surfaces and higher loads.
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| B | Damping parameter |
| d | Separation based on asperity heights |
| D | Journal diameter |
| E | Material elastic modulus |
| E’ | Effective elastic modulus for rough surface contact |
| h | Separation based on surface heights |
| h00 | Constant in separation relationship |
| K | Stiffness parameter |
| J | Integral required for separation computation |
| KH | Hertzian contact stiffness parameter |
| Kp | Stiffness of pad pivot contact |
| L | Bearing axial length or length of line contact |
| p | Nominal pressure for the contact of two flat surfaces with constant mean separation |
| pH | Maximum Hertzian pressure |
| R | Effective radius of curvature |
| Ra | Average absolute deviation of profile heights from the mean line |
| Rp | Radius of pad back |
| Rh | Radius of pad housing |
| Sy | Material yield strength |
| W | Load on bearing |
| x | Spatial coordinate perpendicular to contact line |
| xE | Spatial coordinate at boundary of contact region |
| xH | Hertzian contact half width |
| X | Dimensionless spatial coordinate (X = x/xH) |
| ys | Distance between the mean of summit heights and that of the surface heights |
| z | asperity height measured from the mean line of summit heights |
| β | Asperity tip radius |
| βeq | Equiv. two-surface asperity tip radius |
| δ | Compliance, relative displacement between cylinders |
| δH | Hertzian compliance |
| η | Density of asperities on surface |
| ηeq | Equiv. two-surface asperity density |
| ν | Poisson’s ratio |
| σ | Standard deviation of surface heights |
| σs | Standard deviation of summit (asperity) heights |
| σeq | Equiv. two-surface std. dev. of surface heights |
| φ | Standard normal distribution function |
| Φ | Function representing JG micro-asperity contact model |
| ω | Asperity interference |
| ωc | Critical interference according to JG theory |
| Ω | Rotational frequency |
| DOF | Degree of freedom |
| BK | Beheshti and Khonsari |
| JG | Jackson and Green |
| KC | TPJB model that explicitly includes individual pad DOF |
| KCM | TPJB model that uses constant values of stiffness, damping, and mass for a given operating condition |
| LBP | Load between pads |
| LOP | Load on pad |
| THD | Thermohydrodynamic |
| TPJB | Tilting-pad journal bearing |
| Unless otherwise noted, overbar in the text definitions indicates dimensionless parameters. | |
References
- Lund, J.W. Spring and Damping Coefficients for the Tilting-Pad Journal Bearing. ASLE Trans. 1964, 7, 342–352. [Google Scholar] [CrossRef]
- Shapiro, W.; Colsher, R. Dynamic Characteristics of Fluid-Film Bearings; Texas A&M University: College Station, TX, USA, 1977; pp. 39–53. [Google Scholar]
- Allaire, P.; Parsell, J.; Barrett, L. A pad perturbation method for the dynamic coefficients of tilting-pad journal bearings. Wear 1981, 72, 29–44. [Google Scholar] [CrossRef]
- Rouch, K.E. Dynamics of Pivoted-Pad Journal Bearings, Including Pad Translation and Rotation Effects. ASLE Trans. 1983, 26, 102–109. [Google Scholar] [CrossRef]
- Young, W.C. Bodies Under Direct Bearing and Shear Stress. In Roark’s Formulas for Stress & Strain, 6th ed.; McGraw-Hill: New York, NY, USA, 1989; pp. 650–651. [Google Scholar]
- Kirk, R.G.; Reedy, S.W. Evaluation of Pivot Stiffness for Typical Tilting-Pad Journal Bearing Designs. J. Vib. Acoust. 1988, 110, 165–171. [Google Scholar] [CrossRef]
- Pettinato, B.; De Choudhury, P. Test Results of Key and Spherical Pivot Five-Shoe Tilt Pad Journal Bearings Part II: Dynamic Measurements. Tribol. Trans. 1999, 42, 675–680. [Google Scholar] [CrossRef]
- Dmochowski, W. Dynamic Properties of Tilting-Pad Journal Bearings: Experimental and Theoretical Investigation of Frequency Effects due to Pivot Flexibility. J. Eng. Gas Turbines Power 2007, 129, 865–869. [Google Scholar] [CrossRef]
- Harris, J.; Childs, D.W. Static Performance Characteristics and Rotordynamic Coefficients for a Four-Pad Ball-in-Socket Tilting-Pad Journal Bearing. In Proceedings of the 2008 ASME Turbo Expo, Berlin, Germany, 9–13 June 2008; pp. 1–12. [Google Scholar]
- Dimond, T.; Younan, A.; Allaire, P. A Review of Tilting Pad Bearing Theory. Int. J. Rotating Mach. 2011, 2011, 908469. [Google Scholar] [CrossRef]
- Wilkes, J.C.; Childs, D.W. Tilting Pad Journal Bearings—A Discussion on Stability Calculation, Frequency Dependence, and Pad and Pivot. J. Eng. Gas Turbines Power 2012, 134, 122508. [Google Scholar] [CrossRef]
- San Andrés, L.; Tao, Y. The Role of Pivot Stiffness on the Dynamic Force Coefficients of Tilting Pad Journal Bearings. J. Eng. Gas Turbines Power 2013, 135, 112505. [Google Scholar] [CrossRef]
- Dang, P.V.; Chatterton, S.; Pennacchi, P. The Effect of the Pivot Stiffness on the Performances of Five-Pad Tilting Pad Bearings. Lubricants 2019, 7, 61. [Google Scholar] [CrossRef]
- Shi, Z.; Jin, Y.; Yuan, X. Influence of pivot design on nonlinear dynamic analysis of vertical and horizontal rotors in tilting pad journal bearings. Tribol. Int. 2019, 140, 105859. [Google Scholar] [CrossRef]
- Wagner, L.F.; Allaire, P.E. Tilting-Pad Journal Bearings—Frequency-Dependent Dynamic Coefficients and Pivot Flexibility Effects. Lubricants 2022, 10, 20. [Google Scholar] [CrossRef]
- Greenwood, J.A.; Tripp, J.H. The Elastic Contact of Rough Spheres. J. Appl. Mech. 1967, 34, 153–159. [Google Scholar] [CrossRef]
- Shi, X.; Polycarpou, A.A. Investigation of Contact Stiffness and Contact Damping for Magnetic Storage Head-Disk Interfaces. J. Tribol. 2008, 130, 021901. [Google Scholar] [CrossRef]
- Greenwood, J.A.; Williamson, J.B.P. Contact of nominally flat surfaces. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1966, 295, 300–319. [Google Scholar] [CrossRef]
- Kagami, J.; Yamada, K.; Hatazawa, T. Contact width and compliance between cylinders and rough plates. Wear 1986, 113, 353–370. [Google Scholar] [CrossRef]
- Jackson, R.L.; Green, I. A statistical model of elasto-plastic asperity contact between rough surfaces. Tribol. Int. 2006, 39, 906–914. [Google Scholar] [CrossRef]
- Beheshti, A.; Khonsari, M. Asperity micro-contact models as applied to the deformation of rough line contact. Tribol. Int. 2012, 52, 61–74. [Google Scholar] [CrossRef]
- McCool, J.I. Predicting Microfracture in Ceramics Via a Microcontact Model. J. Tribol. 1986, 108, 380–385. [Google Scholar] [CrossRef]
- Venner, C.H. Multilevel Solution of the EHL Line and Point Contact Problems. Ph.D. Thesis, Faculty of Engineering Technology, University of Twente, Enschede, The Netherlands, 2022. [Google Scholar] [CrossRef]
- Beheshti, A.; Khonsari, M.M. On the Contact of Curved Rough Surfaces: Contact Behavior and Predictive Formulas. J. Appl. Mech. 2014, 81, 111004. [Google Scholar] [CrossRef]
- McCool, J.I. Relating Profile Instrument Measurements to the Functional Performance of Rough Surfaces. J. Tribol. 1987, 109, 264–270. [Google Scholar] [CrossRef]
- Bhushan, B.; Ko, P.L. Introduction to Tribology, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- ASME B46.1-2019; Surface Texture (Surface Roughness, Waviness, and Lay). American Society of Mechanical Engineers: New York, NY, USA, 2020; 144p.
- Kulhanek, C.D.; Childs, D.W. Measured Static and Rotordynamic Coefficient Results for a Rocker- Pivot, Tilting-Pad Bearing with 50 and 60% Offsets. J. Eng. Gas Turbines Power 2012, 134, 052505. [Google Scholar] [CrossRef]
- Kulhanek, C.D. Dynamic and Static Characteristics of a Rocker-Pivot, Tilting-Pad Bearing with 50% and 60% Offsets. Master’s Thesis, Texas A&M University, College Station, TX, USA, 2010. [Google Scholar]
- Suganami, T.; Szeri, A.Z. A Thermohydrodynamic Analysis of Journal Bearings. J. Lubr. Technol. 1979, 101, 21–27. [Google Scholar] [CrossRef]
- Szeri, A.Z. Tribology, Friction, Lubrication and Wear; McGraw-Hill: New York, NY, USA, 1980. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Surface | σ (μm) | β (μm) | η (m−2) | Ref. |
|---|---|---|---|---|
| No. 1—Smooth | 0.3 | 170 | 1.18 × 109 | [21] |
| No. 2—Med. Smooth | 0.457 | 33.3 | 2.0 × 109 | [24] |
| No. 3—Med. Rough | 1.0 | 55 | 1.15 × 109 | [21] |
| No. 4—Rough | 1.45 | 28 | 1.4 × 109 | [24] |
| Bearing Unit Load (kPa) | Pad No. | Pad Load (N) | Pivot Stiffness (MN/m) |
|---|---|---|---|
| 1034 | 1 | 4040 | 1313 |
| 2 | 4244 | 1330 | |
| 3 | 528 | 618 | |
| 4 | 0 | 0 | |
| 5 | 654 | 686 | |
| 2413 | 1 | 9207 | 1595 |
| 2 | 9393 | 1602 | |
| 3 | 365 | 486 | |
| 4 | 0 | 0 | |
| 5 | 475 | 576 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wagner, L.F. Tilting-Pad Bearings—The Contact Flexibility of the Pivot. Lubricants 2023, 11, 189. https://doi.org/10.3390/lubricants11050189
Wagner LF. Tilting-Pad Bearings—The Contact Flexibility of the Pivot. Lubricants. 2023; 11(5):189. https://doi.org/10.3390/lubricants11050189
Chicago/Turabian StyleWagner, Laurence F. 2023. "Tilting-Pad Bearings—The Contact Flexibility of the Pivot" Lubricants 11, no. 5: 189. https://doi.org/10.3390/lubricants11050189
APA StyleWagner, L. F. (2023). Tilting-Pad Bearings—The Contact Flexibility of the Pivot. Lubricants, 11(5), 189. https://doi.org/10.3390/lubricants11050189