Tribological Behavior Characterization and Fault Detection of Mechanical Seals Based on Face Vibration Acceleration Measurements


Abstract
:1. Introduction
2. Theoretical Model
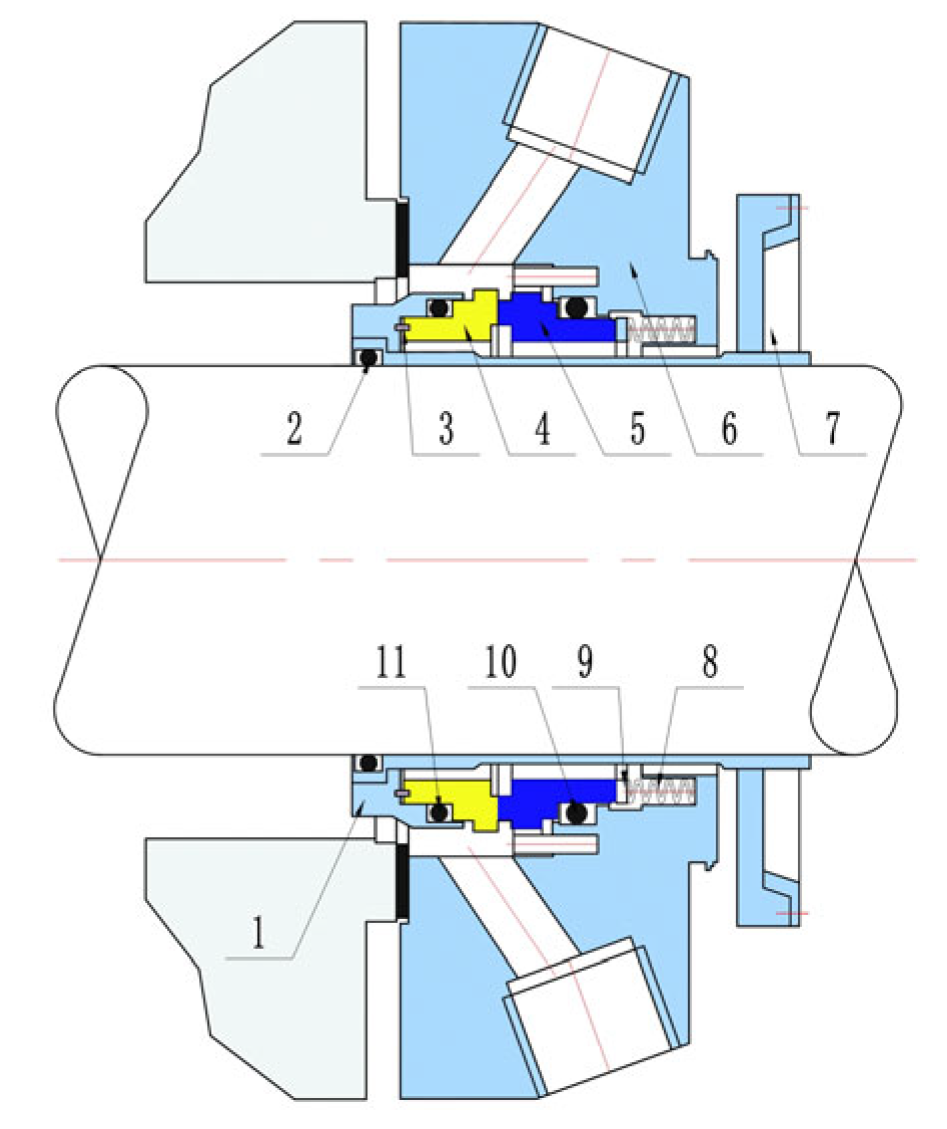
2.1. Structure of Mechanical Seal
2.2. Face Vibration Acceleration Source Mechanism
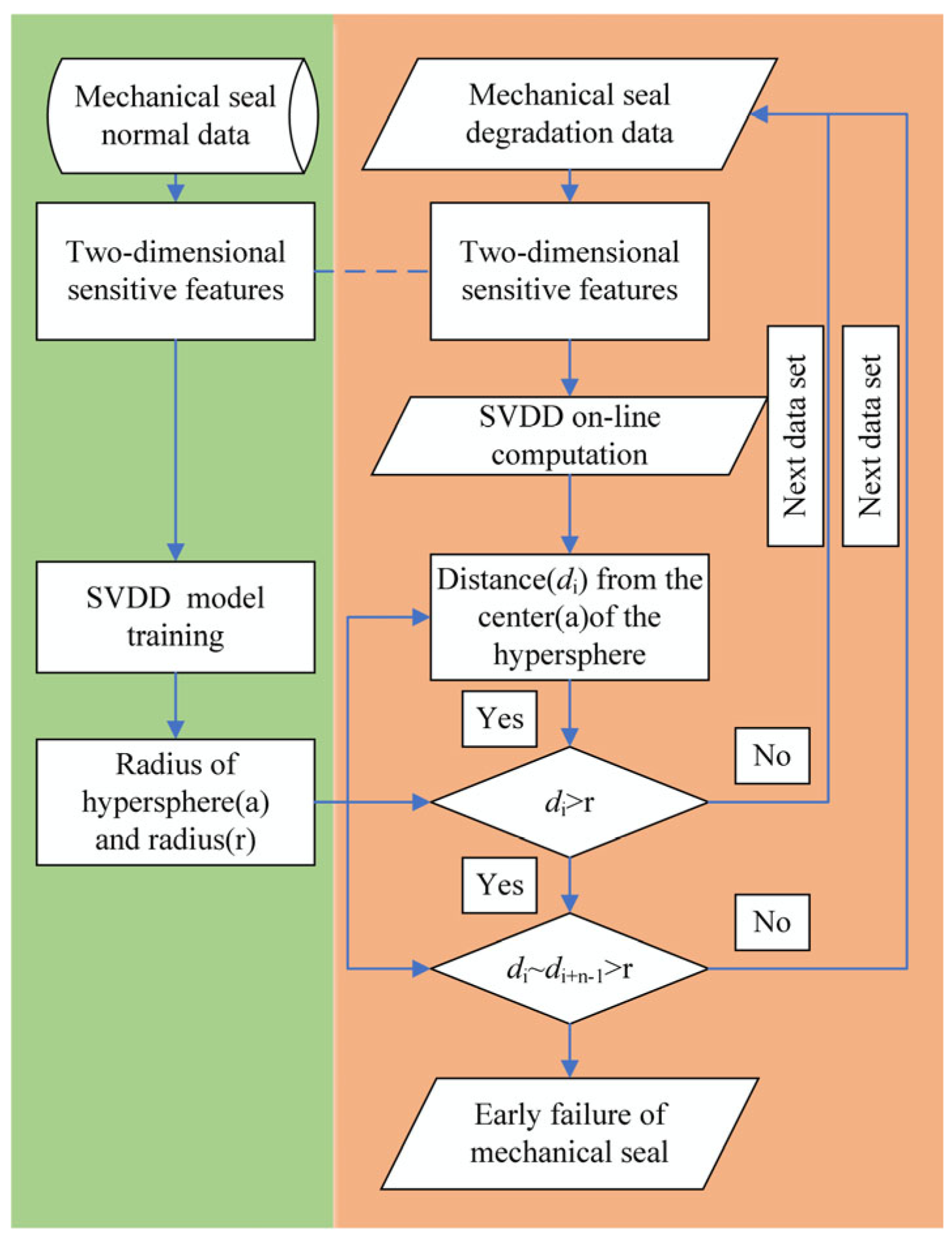
2.3. Face Incipient Fault Detection
3. Experimental Approach
Measurement Methods
4. Results
4.1. Vibration-Sensitive Characteristic Parameter Characterization of Face Tribological Regimes
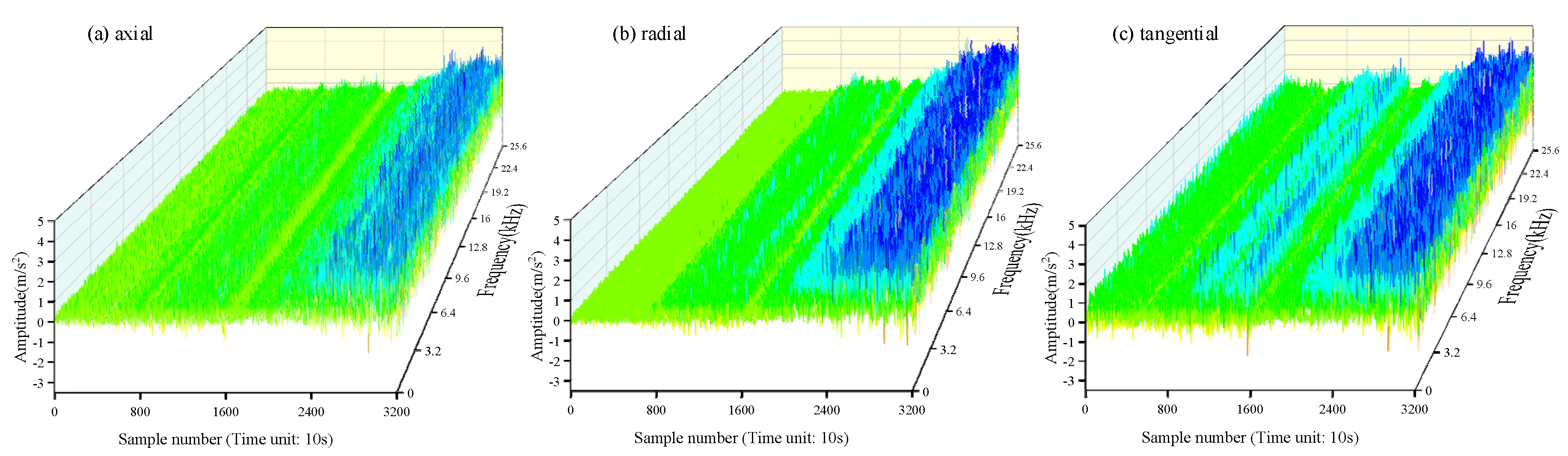
4.1.1. Original Waveform Data of Face Vibration Acceleration
4.1.2. Face Vibration Acceleration Sensitive Characteristic Parameter
4.2. Mechanical Seal Face Performance Degradation Detection and Incipient Fault Early Warning
5. Discussion
5.1. The Variation Law of Sensitive Characteristic Parameters of Face Vibration Acceleration with Rotational Speed
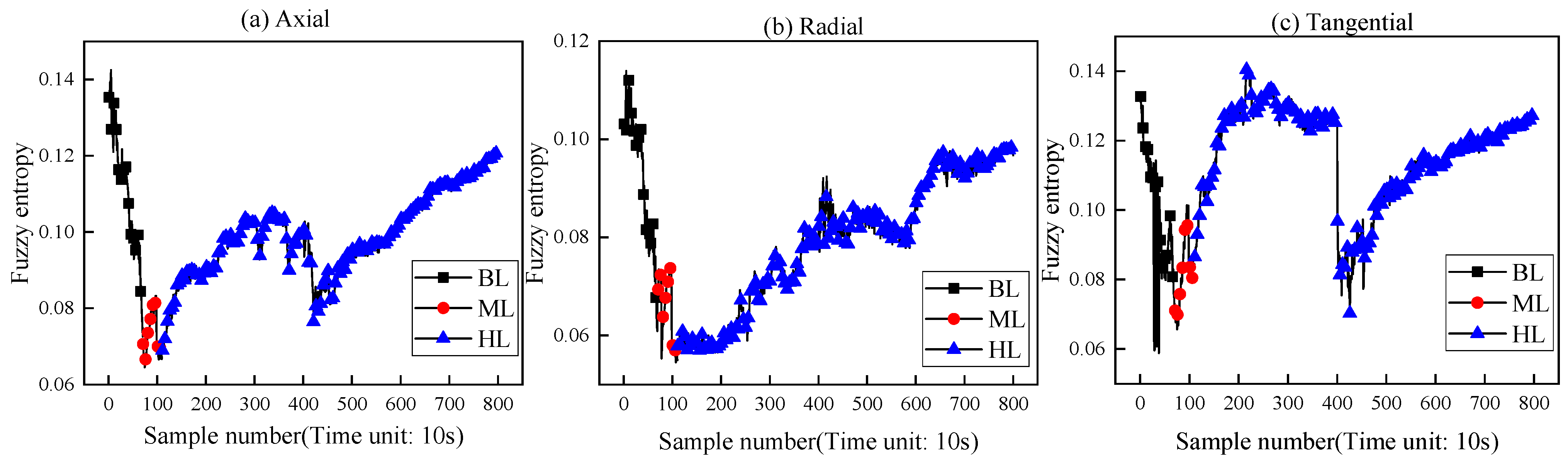
5.2. The Variation Law of Vibration Acceleration Sensitivity Characteristic Parameters in the Process of Face Performance Degradation
6. Conclusions
- (1)
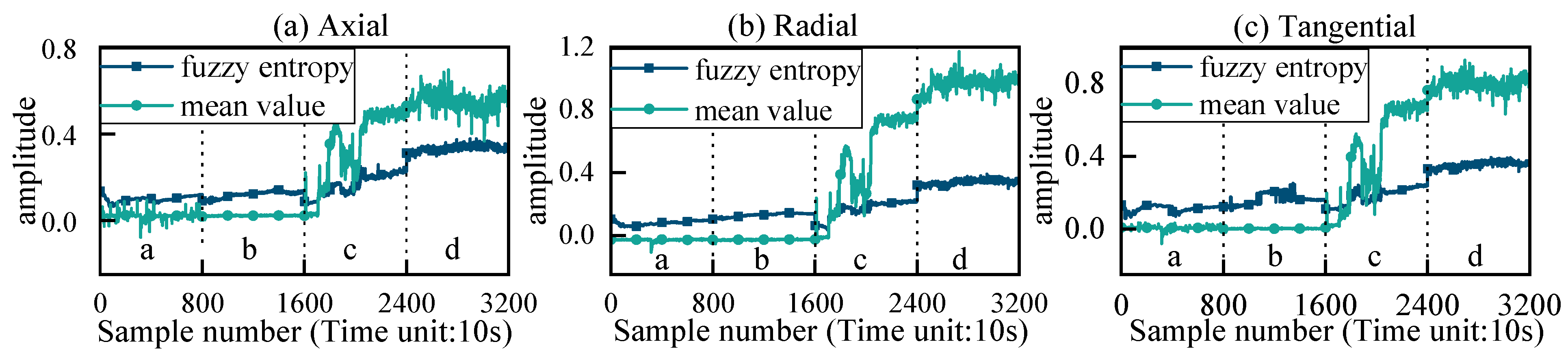
- At the start-up stage of the mechanical seal, the tribological regime is initially BL and then transitions to ML. As the face wear degree increases, the tribological regime gradually shifts from ML to BL. The fuzzy entropy and the mean value of face vibration acceleration exhibit better sensitivity to increasing face wear degree, with the fuzzy entropy being more sensitive than the mean value.
- (2)
- Under the mechanical seal’s ML regime, both the fuzzy entropy and the mean value of stationary ring face vibration increase linearly with rotating speed. The amplitude of fundamental frequency in the face vibration waveform also increases with rotating speed, while the change in amplitude of t radial vibration waveform is more sensitive.
- (3)
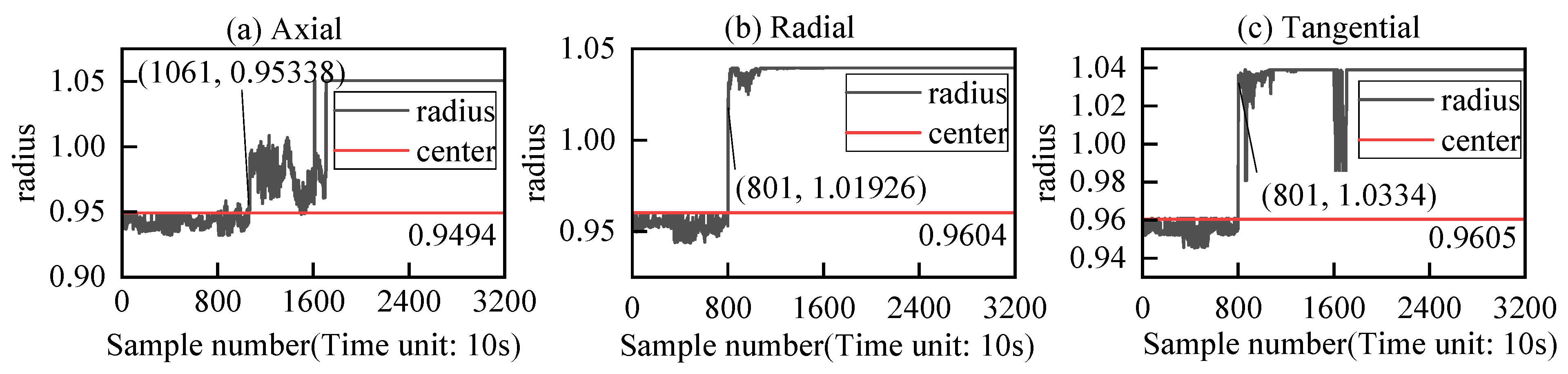
- The incipient fault detection model based on SVDD was established using the fuzzy entropy and mean value indexes of the face vibration acceleration. The test data can be used to detect the incipient fault of the mechanical.
- (1)
- It aims to investigate the law governing the change of sensitive characteristic parameters of vibration acceleration on the mechanical seal face with respect to pressure, temperature, compensation spring force, and friction torque between the faces.
- (2)
- The method of measuring face vibration acceleration is applied in engineering practice to explore the accuracy and robustness of the proposed incipient fault detection model under actual working conditions.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Abbreviation | Definition |
| SVDD | Support vector data description |
| AE | Acoustic emission |
| RMS | Root mean square |
| BL | Boundary lubrication |
| ML | Mixed lubrication |
| HL | Hydrodynamic lubrication |
| U1 | The first face’s x-direction velocity vector |
| V1 | The first face’s y-direction velocity vector |
| W1 | The first face’s z-direction velocity vector |
| U2 | The second face’s x-direction velocity vector |
| V2 | The second face’s y-direction velocity vector |
| W2 | The second face’s z-direction velocity vector |
| The velocity vector of fluid film in the x-direction | |
| The velocity vector of fluid film in the y-direction | |
| The velocity vector of fluid film in the z-direction | |
| The density of the fluid | |
| The dynamic viscosity of the fluid | |
| The shear stress in the x direction | |
| The shear stress in the y direction | |
| H | The thickness of the fluid film |
| P | Fluid pressure |
| Friction force | |
| The average radius | |
| The outer diameter of the stationary ring | |
| The radius of the contact node | |
| The rotational speed | |
| The angle | |
| Tangential contact friction force | |
| The product of the local average contact pressure and the empirical value of a contact friction factor |
References
- Jianjun, S.; Chenbo, M.; Qiuping, Y.; Jianhua, L.; Min, Z.; Peiyan, Z. Numerical analysis on a new pump-out hydrodynamic mechanical seal. Tribol. Int. 2017, 106, 62–70. [Google Scholar] [CrossRef]
- Zheng, W.; Sun, J.; Ma, C.; Yu, Q. Percolation interpretation of film pressure forming mechanism of mechanical seal and calculation method of film pressure coefficient. Tribol. Int. 2022, 173, 107664. [Google Scholar] [CrossRef]
- Raadnui, S. Seal wear debris characterization for predictive maintenance. Wear 2015, 330–331, 490–497. [Google Scholar] [CrossRef]
- Yin, Y.; Huang, W.; Liu, X.; Liu, Y.; Wang, Y.; Li, K. The State-of-the-art and Future Development of Mechanical Face Seal Intelligentization. Jixie Gongcheng Xuebao/J. Mech. Eng. 2021, 57, 116–128. [Google Scholar] [CrossRef]
- Fan, Y.E.; Gu, F.; Ball, A. A Review of the Condition Monitoring of Mechanical Seals. In Proceedings of the ASME 7th Biennial Conference on Engineering Systems Design and Analysis, Manchester, UK, 19–22 July 2004; pp. 179–184. [Google Scholar]
- Ni, X.; Ma, C.; Sun, J.; Zhang, Y.; Yu, Q. A leakage model of contact mechanical seals based on the fractal theory of porous medium. Coatings 2020, 11, 20. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, K.; Zhang, E.Q.; Fu, P. Mechanical seal condition monitoring technology research. Appl. Mech. Mater. 2014, 529, 344–348. [Google Scholar] [CrossRef]
- Nunes, P.; Santos, J.; Rocha, E. Challenges in predictive maintenance—A review. CIRP J. Manuf. Sci. Technol. 2023, 40, 53–67. [Google Scholar] [CrossRef]
- Kou, G.Y.; Li, X.H.; Wang, Y.; Tan, C.S.; Zhou, K.R.; Yang, X.P. Multifield Coupling Model and Performance Analysis of a Hydrostatic Mechanical Seal. Energies 2020, 13, 5159. [Google Scholar] [CrossRef]
- Tomioka, J.; Miyanaga, N. Effect of surface roughness of mechanical seals under blood sealing. Lubr. Sci. 2010, 22, 443–452. [Google Scholar] [CrossRef]
- Zhang, Z.; Gao, D.; Guan, T.; Liang, Y.; Zhao, J.; Wang, L.; Tang, J. Experimental Study on Friction and Wear Characteristics of Hydraulic Reciprocating Rotary Seals. Lubricants 2023, 11, 385. [Google Scholar] [CrossRef]
- Duan, X.; Liu, D.; Wang, S.; Shang, Y. A Hydraulic Reciprocating Rod Seal’s Life Evaluation Method Incorporating Failure Mechanism Analysis and Test Observation Data. Lubricants 2023, 11, 319. [Google Scholar] [CrossRef]
- Takami, M.R.; Gerdroodbary, M.B.; Ganji, D.D. Thermal analysis of mechanical face seal using analytical approach. Therm. Sci. Eng. Prog. 2018, 5, 60–68. [Google Scholar] [CrossRef]
- Luan, Z.; Khonsari, M.M. Heat transfer analysis in mechanical seals using fin theory. Proc. Inst. Mech. Eng. Part J-J. Eng. Tribol. 2007, 221, 717–725. [Google Scholar] [CrossRef]
- Rahimpour, M.; Samadani, A.; Akbarzadeh, S. Application of Load-Sharing Concept to Mechanical Seals. Lubricants 2023, 11, 266. [Google Scholar] [CrossRef]
- Sun, J.; He, X.; Wei, L.; Feng, X. Failure analysis and seal life prediction for contacting mechanical seals. In Proceedings of the ICEM 2008: International Conference on Experimental Mechanics 2008, Nanjing, China, 8–11 November 2009; pp. 848–854. [Google Scholar]
- Anderson, W.B.; Jarzynski, J.; Salant, R.F. A Condition Monitor for Liquid Lubricated Mechanical Seals. Tribol. Trans. 2001, 44, 479–483. [Google Scholar] [CrossRef]
- Towsyfyan, H.; Gu, F.; Ball, A.D.; Liang, B. Modelling acoustic emissions generated by tribological behaviour of mechanical seals for condition monitoring and fault detection. Tribol. Int. 2018, 125, 46–58. [Google Scholar] [CrossRef]
- Fan, W.; Huang, W.; Liu, Y.; Yin, Y.; Liu, X.; Wang, Y. State Evolution of Dry Gas Seal during Repeated Start–Stop Operation Using Acoustic Emission Method. Tribol. Trans. 2020, 63, 173–181. [Google Scholar] [CrossRef]
- Yin, Y.; Huang, W.; Liu, X.; Liu, Y.; Wang, Z.; Fan, W.; Hu, S. Analysis of the Dynamic Friction of a Gas Face Seal Based on Acoustic Emissions. Tribol. Lett. 2018, 66, 85. [Google Scholar] [CrossRef]
- Reddyhoff, T.; Dwyer-Joyce, R.S.; Harper, P. A New Approach for the Measurement of Film Thickness in Liquid Face Seals. Tribol. Trans. 2008, 51, 140–149. [Google Scholar] [CrossRef]
- Fan, Y.B.; Gu, F.S.; Ball, A. Acoustic emission monitoring of mechanical seals using MUSIC algorithm based on higher order statistics. Key Eng. Mater. 2009, 413, 811–816. [Google Scholar] [CrossRef]
- Lee, D.H.; Ha, C.W. Characteristics of Acceleration and Acoustic Emission Signals from Mechanical Seals. In Proceedings of the Transactions of the Korean Nuclear Society Autumn Meeting, Gyeongju, Republic of Korea, 29–30 October 2015. [Google Scholar]
- Chittora, S.M. Monitoring of Mechanical Seals in Process Pumps. Master’s Thesis, KTH Industrial Engineering and Management, Stockholm, Sweden, 2018. [Google Scholar]
- Luo, Y.; Zhang, W.; Fan, Y.; Han, Y.; Li, W.; Acheaw, E. Analysis of Vibration Characteristics of Centrifugal Pump Mechanical Seal under Wear and Damage Degree. Shock Vib. 2021, 2021, 6670741. [Google Scholar] [CrossRef]
- Chen, R.; Huang, X.; Yang, L.; Xu, X.; Zhang, X.; Zhang, Y. Intelligent fault diagnosis method of planetary gearboxes based on convolution neural network and discrete wavelet transform. Comput. Ind. 2019, 106, 48–59. [Google Scholar] [CrossRef]
- Zhao, H.; Yang, X.; Chen, B.; Chen, H.; Deng, W. Bearing fault diagnosis using transfer learning and optimized deep belief network. Meas. Sci. Technol. 2022, 33, 065009. [Google Scholar] [CrossRef]
- Zhong, Z.; Zhao, Y.; Yang, A.; Zhang, H.; Zhang, Z. Prediction of Remaining Service Life of Rolling Bearings Based on Convolutional and Bidirectional Long- and Short-Term Memory Neural Networks. Lubricants 2022, 10, 170. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, S.; Xiao, F. Pattern recognition-based chillers fault detection method using Support Vector Data Description (SVDD). Appl. Energy 2013, 112, 1041–1048. [Google Scholar] [CrossRef]
- Zhao, Y.-P.; Xie, Y.-L.; Ye, Z.-F. A new dynamic radius SVDD for fault detection of aircraft engine. Eng. Appl. Artif. Intell. 2021, 100, 104177. [Google Scholar] [CrossRef]
- Huang, J.; Yan, X. Related and independent variable fault detection based on KPCA and SVDD. J. Process Control 2016, 39, 88–99. [Google Scholar] [CrossRef]
- Tax, D.M.J.; Duin, R.P.W. Support vector data description. Mach. Learn. 2004, 54, 45–66. [Google Scholar] [CrossRef]
- Attoui, I.; Oudjani, B.; Boutasseta, N.; Fergani, N.; Bouakkaz, M.-S.; Bouraiou, A. Novel predictive features using a wrapper model for rolling bearing fault diagnosis based on vibration signal analysis. Int. J. Adv. Manuf. Technol. 2020, 106, 3409–3435. [Google Scholar] [CrossRef]
- McInerny, S.A.; Dai, Y. Basic vibration signal processing for bearing fault detection. IEEE Trans. Educ. 2003, 46, 149–156. [Google Scholar] [CrossRef]
- Zuber, N.; Bajrić, R.; Šostakov, R. Gearbox faults identification using vibration signal analysis and artificial intelligence methods. Eksploat. Niezawodn. 2014, 16, 61–65. [Google Scholar]
- Wang, Q.; Wang, S.; Wei, B.; Chen, W.; Zhang, Y. Weighted K-NN classification method of bearings fault diagnosis with multi-dimensional sensitive features. IEEE Access 2021, 9, 45428–45440. [Google Scholar] [CrossRef]
- Qiu, G.; Gu, Y.; Chen, J. Selective health indicator for bearings ensemble remaining useful life prediction with genetic algorithm and Weibull proportional hazards model. Measurement 2020, 150, 107097. [Google Scholar] [CrossRef]
- Schwartz, S.; Jiménez, J.J.M.; Vingerhoeds, R.; Salaün, M. An unsupervised approach for health index building and for similarity-based remaining useful life estimation. Comput. Ind. 2022, 141, 103716. [Google Scholar] [CrossRef]
- Harrath, S.; Ali, J.B.; Zouaghi, T.; Zerhouni, N. A new adaptive prognostic strategy based on online future evaluation and extended Kalman filtering. In Proceedings of the 2019 6th International Conference on Control, Decision and Information Technologies (CoDIT), Paris, France, 23–26 April 2019; pp. 2033–2038. [Google Scholar]
- Xu, D.; Shao, J.; Ge, J.; Wang, Y.; Wei, F.; Fan, Y. Research on Weak Signal Feature Extraction Method of Rolling Bearing Based on Refined Composite Multi-Scale Weighted Entropy. Machines 2022, 10, 1155. [Google Scholar] [CrossRef]
- Rentong, C.; Zhang, C.; Shaoping, W.; Yujie, Q. Reliability estimation of mechanical seals based on bivariate dependence analysis and considering model uncertainty. Chin. J. Aeronaut. 2021, 34, 554–572. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Formula | Feature | Formula |
|---|---|---|---|
| Mean value | Waveform index | ||
| Root contact-mean-square | Peak indicator | ||
| Root amplitude | Pulse indicator | ||
| Absolute value | Margin factor | ||
| Skewness | Skewness factor | ||
| Kurtosis | Kurtosis factor | ||
| Variance | Average frequency | ||
| Standard deviation | Gravity frequency | ||
| Maximum | Root mean square frequency | ||
| Minimum | Frequency standard deviation | ||
| Peak | Entropy | ||
| Peak-to-peak |
| Feature | |||||||
|---|---|---|---|---|---|---|---|
| Entropy | Wavelet energy entropy | Wavelet singular entropy | Sample entropy | Information entropy | Permutation entropy | Fuzzy entropy | Dispersion entropy |
| Type | Parameter |
|---|---|
| Sound and vibration input module | Maximum sampling rate: 51.2 KS/s. Analog input voltage range: −5 V–5 V. IEPE incentive: 2 mA. |
| Triaxial ICP accelerometer | Sensitivity: 10 Mv/g. Range: ±500 g pk. Resolution: 0.003 g rms. Frequency response: 2–5 kHz. |
| Ring Number | Surface Roughness Ra/μm |
|---|---|
| 1# | 0.07 |
| 2# | 0.09 |
| 3# | 0.20 |
| 4# | 0.32 |
| Type | Measuring Point | Length | Degeneration Data Length | Sampling Frequency (kHz) | Waveform Data Length |
|---|---|---|---|---|---|
| Face degradation | Axial | 800 | 3200 | 25.6 | 25,600 |
| Radial | |||||
| Tangential |
| Feature | F1 | F2 | F3 | F4 | F5 | F6 | F7 | F8 |
| Sensitivity | 0.3355 | 0.3136 | 0.3043 | 0.3083 | 0.1896 | 0.2190 | 0.2897 | 0.3121 |
| Feature | F9 | F10 | F11 | F12 | F13 | F14 | F15 | F16 |
| Sensitivity | 0.2710 | 0.2577 | 0.2734 | 0.2643 | 0.3299 | 0.2669 | 0.2810 | 0.2851 |
| Feature | F17 | F18 | F19 | F20 | F21 | F22 | F23 | F24 |
| Sensitivity | 0.1225 | 0.3029 | 0.3216 | 0.2768 | 0.2973 | 0.3005 | 0.2557 | 0.2720 |
| Feature | F25 | F26 | F27 | F28 | F29 | F30 | F31 | F32 |
| Sensitivity | 0.3129 | 0.2938 | 0.3306 | 0.1370 | 0.2147 | 0.0975 | 0.3038 | 0.3324 |
| Feature | F33 | F34 | F35 | F36 | F37 | F38 | F39 | |
| Sensitivity | 0.1733 | 0.3416 | 0.3219 | 0.3322 | 0.3100 | 0.3168 | 0.1586 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Song, Y.; Li, H.; Shu, Y.; Xiao, Y. Tribological Behavior Characterization and Fault Detection of Mechanical Seals Based on Face Vibration Acceleration Measurements. Lubricants 2023, 11, 430. https://doi.org/10.3390/lubricants11100430
Wang Q, Song Y, Li H, Shu Y, Xiao Y. Tribological Behavior Characterization and Fault Detection of Mechanical Seals Based on Face Vibration Acceleration Measurements. Lubricants. 2023; 11(10):430. https://doi.org/10.3390/lubricants11100430
Chicago/Turabian StyleWang, Qingfeng, Yunfeng Song, Hua Li, Yue Shu, and Yang Xiao. 2023. "Tribological Behavior Characterization and Fault Detection of Mechanical Seals Based on Face Vibration Acceleration Measurements" Lubricants 11, no. 10: 430. https://doi.org/10.3390/lubricants11100430
APA StyleWang, Q., Song, Y., Li, H., Shu, Y., & Xiao, Y. (2023). Tribological Behavior Characterization and Fault Detection of Mechanical Seals Based on Face Vibration Acceleration Measurements. Lubricants, 11(10), 430. https://doi.org/10.3390/lubricants11100430