
Deep Learning Based Detection Tool for Impacted Mandibular Third Molar Teeth


Abstract
:1. Introduction
- support clinicians and physicians who are busy all day to avoid misdiagnosis;
- help populations with a shortage of radiologists or screening modalities;
- help radiologists manage their workloads in large hospitals;
- create reports about pathologic or anatomical conditions in panoramic radiographs, which results in saving time;
- provide a focus on the education of observers and new graduates in clinics.
Related Works
2. Materials and Methods
3. Results
4. Discussion
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zadrożny, Ł.; Regulski, P.; Brus-Sawczuk, K.; Czajkowska, M.; Parkanyi, L.; Ganz, S.; Mijiritsky, E. Artificial Intelligence Application in Assessment of Panoramic Radiographs. Diagnostics 2020, 12, 224. [Google Scholar] [CrossRef] [PubMed]
- Prados-Privado, M.; Villalón, J.G.; Martínez-Martínez, C.H.; Ivorra, C. Dental Images Recognition Technology and Applications: A Literature Review. Appl. Sci. 2020, 10, 2856. [Google Scholar] [CrossRef] [Green Version]
- Perschbacher, S. Interpretation of panoramic radiographs. Aust. Dent. J. 2012, 57, 40–45. [Google Scholar] [CrossRef] [PubMed]
- Kuwada, C.; Ariji, Y.; Fukuda, M.; Kise, Y.; Fujita, H.; Katsumata, A.; Ariji, E. Deep learning systems for detecting and classifying the presence of impacted supernumerary teeth in the maxillary incisor region on panoramic radiographs. Oral Surg. Oral Med. Oral Pathol. Oral Radiol. 2020, 130, 464–469. [Google Scholar] [CrossRef]
- Panetta, K.; Rajendran, R.; Ramesh, A.; Rao, S.P.; Agaian, S. Tufts Dental Database: A Multimodal Panoramic X-ray Dataset for Benchmarking Diagnostic Systems. IEEE J. Biomed. Health Inform. 2021. [Google Scholar] [CrossRef]
- Hassoun, M.H. Fundamentals of Artificial Neural Networks; MIT Press: London, UK, 1995. [Google Scholar]
- Yegnanarayana, B. Artificial Neural Networks; PHI Learning Pvt. Ltd.: Delhi, India, 2009. [Google Scholar]
- Krogh, A. What are artificial neural networks? Nat. Biotechnol. 2008, 26, 195–197. [Google Scholar] [CrossRef]
- Bishop, C.M.; Nasrabadi, N.M. Pattern Recognition and Machine Learning; Springer: New York, NY, USA, 2006; Volume 4, p. 768. [Google Scholar]
- Jordan, M.I.; Mitchell, T.M. Machine learning: Trends, perspectives, and prospects. Science 2015, 349, 255–260. [Google Scholar] [CrossRef]
- Wang, S.; Summers, R.M. Machine learning and radiology. Med. Image Anal. 2012, 16, 933–951. [Google Scholar] [CrossRef] [Green Version]
- Skansi, S. Introduction to Deep Learning: From Logical Calculus to Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: London, UK, 2016. [Google Scholar]
- Shin, H.C.; Roth, H.R.; Gao, M.; Lu, L.; Xu, Z.; Nogues, I.; Summers, R.M. Deep convolutional neural networks for computer-aided detection: CNN architectures, dataset characteristics and transfer learning. IEEE Trans. Med. Imag. 2016, 35, 1285–1298. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Ouyang, W.; Wang, X.; Fieguth, P.; Chen, J.; Liu, X.; Pietikäinen, M. Deep learning for generic object detection: A survey. Int. J. Computerv. 2020, 128, 261–318. [Google Scholar] [CrossRef] [Green Version]
- Khan, A.; Sohail, A.; Zahoora, U.; Qureshi, A.S. A survey of the recent architectures of deep convolutional neural networks. Artif. Intell. Rev. 2020, 53, 5455–5516. [Google Scholar] [CrossRef] [Green Version]
- Schwendicke, F.; Golla, T.; Dreher, M.; Krois, J. Convolutional neural networks for dental image diagnostics: A scoping review. J. Dent. 2019, 91, 103226. [Google Scholar] [CrossRef] [PubMed]
- Leite, A.F.; Gerven, A.V.; Willems, H.; Beznik, T.; Lahoud, P.; Gaêta-Araujo, H.; Vranckx, M.; Jacobs, R. Artificial intelligence driven novel tool for tooth detection and segmentation on panoramic radiographs. Clin. Oral Investig. 2021, 25, 2257–2267. [Google Scholar] [CrossRef] [PubMed]
- Parvez, M.F.; Kota, M.; Syoji, K. Optimization technique combined with deep learning method for teeth recognition in dental panoramic radiographs. Sci. Rep. 2020, 10, 19261. [Google Scholar]
- Tuzoff, D.V.; Tuzova, L.N.; Bornstein, M.M.; Krasnov, A.S.; Kharchenko, M.A.; Nikolenko, S.I.; Sveshnikov, M.M.; Bednenko, G.B. Tooth detection and numbering in panoramic radiographs using convolutional neural networks. Dentomaxillofac. Radiol. 2019, 48, 20180051. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, K.; Lyu, P.; Li, H.; Zhang, L.; Wu, J.; Lee, C.H. A deep learning approach to automatic teeth detection and numbering based on object detection in dental periapical films. Sci. Rep. 2019, 9, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Kim, C.; Kim, D.; Jeong, H.; Yoon, S.J.; Youm, S. Automatic tooth detection and numbering using a combination of a CNN and heuristic algorithm. Appl. Sci. 2020, 10, 5624. [Google Scholar] [CrossRef]
- Kuwana, R.; Ariji, Y.; Fukuda, M.; Kise, Y.; Nozawa, M.; Kuwada, C.; Muramatsu, C.; Katsumata, A.; Fujita, H.; Ariji, E. Performance of deep learning object detection technology in the detection and diagnosis of maxillary sinus lesions on panoramic radiographs. Dentomaxillofac. Radiol. 2021, 50, 20200171. [Google Scholar] [CrossRef]
- Chang, H.J.; Lee, S.J.; Yong, T.H.; Shin, N.Y.; Jang, B.G.; Kim, J.E.; Huh, K.H.; Lee, S.S.; Heo, M.S.; Choi, S.C.; et al. Deep learning hybrid method to automatically diagnose periodontal bone loss and stage periodontitis. Sci. Rep. 2020, 10, 7531. [Google Scholar] [CrossRef]
- Zheng, Z.; Yan, H.; Setzer, F.C.; Shi, K.J.; Mupparapu, M.; Li, J. Anatomically constrained deep learning for automating dental CBCT segmentation and lesion detection. IEEE Trans. Autom. Sci. Eng. 2020, 18, 603–614. [Google Scholar] [CrossRef]
- Vinayahalingam, S.; Xi, T.; Bergé, S.; Maal, T.; de Jong, G. Automated detection of third molars and mandibular nerve by deep learning. Sci. Rep. 2019, 9, 9007. [Google Scholar] [CrossRef] [PubMed]
- Hiraiwa, T.; Ariji, Y.; Fukuda, M.; Kise, Y.; Nakata, K.; Katsumata, A.; Fujita, H.; Ariji, E. A deep-learning artificial intelligence system for assessment of root morphology of the mandibular first molar on panoramic radiography. Dentomaxillofac. Radiol. 2019, 48, 20180218. [Google Scholar] [CrossRef] [PubMed]
- Carrillo-Perez, F.; Pecho, O.E.; Morales, J.C.; Paravina, R.D.; Della Bona, A.; Ghinea, R.; Herrera, L.J. Applications of artificial intelligence in dentistry: A comprehensive review. J. Esthet. Restor. Dent. 2022, 34, 259–280. [Google Scholar] [CrossRef] [PubMed]
- World Health Organization. International Statistical Classification of Diseases and Related Health Problems; 10th Revision; WHO: Geneva, Italy, 2011; Volume 2.
- Rantanen, A. The age of eruption of the third molar teeth. A clinical study based on Finnish university students. Acta Odontol. Scand. 1967, 25, 1–86. [Google Scholar]
- Hugoson, A.; Kugelberg, C. The prevalence of third molars in a Swedish population. An epidemiological study. Commun. Dent. Health 1988, 5, 121–138. [Google Scholar]
- Royal College of Surgeons Faculty of Dental Surgery. Parameters of Care for Patients Undergoing Mandibular Third Molar Surgery. 2020. Available online: https://www.rcseng.ac.uk/-/media/files/rcs/fds/guidelines/3rd-molar-guidelines--april-2021.pdf (accessed on 23 April 2021).
- Doğan, N.; Orhan, K.; Günaydin, Y.; Köymen, R.; Ökçu, K.; Üçok, Ö. Unerupted mandibular third molars: Symptoms, associated pathologies, and indications for removal in a Turkish population. Quintessence Int. 2007, 38, e497–e505. [Google Scholar]
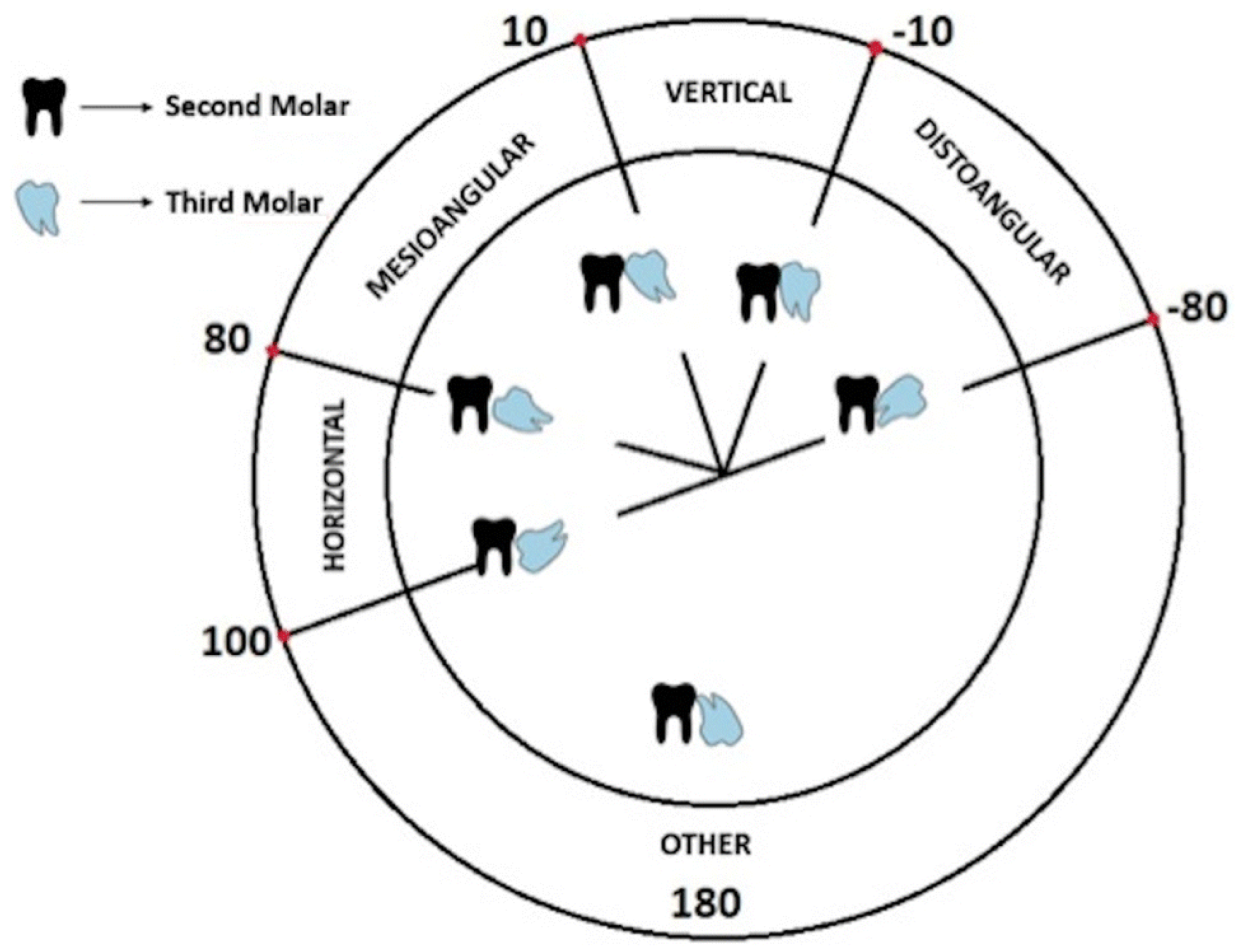
- Gümrükçü, Z.; Balaban, E.; Karabağ, M. Is there a relationship between third-molar impaction types and the dimen-sional/angular measurement values of posterior mandible according to Pell and Gregory/Winter Classification? Oral Radiol. 2021, 37, 29–35. [Google Scholar] [CrossRef]
- McGrath, C.; Comfort, M.B.; Lo, E.C.; Luo, Y. Can third molar surgery improve quality of life? A 6-month cohort study. J. Oral. Maxillofac. Surg. 2003, 61, 759–763. [Google Scholar] [CrossRef]
- Savin, J.; Ogden, G. Third molar surgery—A preliminary report on aspects affecting quality of life in the early postoperative period. Br. J. Oral Maxillofac. Surg. 1997, 35, 246–253. [Google Scholar] [CrossRef]
- McArdle, L.; Renton, T. The effects of NICE guidelines on the management of third molar teeth. Br. Dent. J. 2012, 213, E8. [Google Scholar] [CrossRef]
- Faure, J.; Engelbrecht, A. Impacted Tooth Detection in Panoramic Radiographs. In International Work-Conference on Artificial Neural Networks; Springer: Cham, Switzerland, 2021; pp. 525–536. [Google Scholar]
- Zhang, W.; Li, J.; Li, Z.B.; Li, Z. Predicting postoperative facial swelling following impacted mandibular third molars extraction by using artificial neural networks evaluation. Sci. Rep. 2018, 8, 12281. [Google Scholar] [CrossRef]
- Orhan, K.; Bilgir, E.; Bayrakdar, I.S.; Ezhov, M.; Gusarev, M.; Shumilov, E. Evaluation of artificial intelligence for detecting impacted third molars on cone-beam computed tomography scans. J. Stomatol. Oral Maxillofac. Surg. 2021, 122, 333–337. [Google Scholar] [CrossRef]
- Başaran, M.; Çelik, Ö.; Bayrakdar, I.S.; Bilgir, E.; Orhan, K.; Odabaş, A.; Jagtap, R. Diagnostic charting of panoramic radiography using deep-learning artificial intelligence system. Oral Radiol. 2021, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Yasa, Y.; Çelik, Ö.; Bayrakdar, I.S.; Pekince, A.; Orhan, K.; Akarsu, S.; Atasoy, S.; Bilgir, E.; Odabaş, A.; Aslan, A.F. An artificial intelligence proposal to automatic teeth detection and numbering in dental bite-wing radiographs. Acta Odontol. Scand. 2020, 11, 275–281. [Google Scholar] [CrossRef] [PubMed]
- Winter, G. Impacted Mandibular Third Molars; American Medical Book, Co.: St Louis, MO, USA, 1926. [Google Scholar]
- Pell, G.J. Impacted mandibular third molars: Classification and modified techniques for removal. Dent Digest. 1933, 39, 330–338. [Google Scholar]
- Tzutalin. LabelImg. Git Code. 2015. Available online: https://github.com/tzutalin/labelImg (accessed on 5 October 2015).
- Carter, K.; Worthington, S. Predictors of third molar impaction: A systematic review and meta-analysis. J. Dent. Res. 2016, 95, 267–276. [Google Scholar] [CrossRef]
- Jaroń, A.; Trybek, G. The pattern of mandibular third molar impaction and assessment of surgery difficulty: A Retrospective study of radiographs in east Baltic population. Int. J. Environ. Res. Public Health 2021, 18, 6016. [Google Scholar] [CrossRef]
- Zaman, M.U.; Almutairi, N.S.; Abdulrahman Alnashwan, M.; Albogami, S.M.; Alkhammash, N.M.; Alam, M.K. Pattern of Mandibular Third Molar Impaction in Nonsyndromic 17760 Patients: A Retrospective Study among Saudi Population in Central Region, Saudi Arabia. BioMed Res. Int. 2021, 2021, 1880750. [Google Scholar] [CrossRef]
- Demirel, O.; Akbulut, A. Evaluation of the relationship between gonial angle and impacted mandibular third molar teeth. Anat. Sci. Int. 2020, 95, 134–142. [Google Scholar] [CrossRef]
- Hashemipour, M.A.; Tahmasbi-Arashlow, M.; Fahimi-Hanzaei, F. Incidence of impacted mandibular and maxillary third molars: A radiographic study in a Southeast Iran population. Med. Oral Patol. Oral Cir. Bucal. 2013, 18, e140. [Google Scholar] [CrossRef]
- Eshghpour, M.; Nezadi, A.; Moradi, A.; Shamsabadi, R.M.; Rezaer, N.M.; Nejat, A. Pattern of mandibular third molar impaction: A cross-sectional study in northeast of Iran. Niger. J. Clin. Pract. 2014, 17, 673–677. [Google Scholar] [PubMed] [Green Version]
- Goyal, S.; Verma, P.; Raj, S.S. Radiographic evaluation of the status of third molars in Sriganganagar population—A digital panoramic study. Malays. J. Med. Sci. 2016, 23, 103. [Google Scholar] [CrossRef] [PubMed]
- Enabulele, J.E.; Obuekwe, O.N. Prevalence of caries and cervical resorption on adjacent second molar associated with impacted third molar. J. Oral Maxillofac. Surg. Med. Pathol. 2017, 29, 301–305. [Google Scholar] [CrossRef]
- Passi, D.; Singh, G.; Dutta, S.; Srivastava, D.; Chandra, L.; Mishra, S.; Dubey, M. Study of pattern and prevalence of mandibular impacted third molar among Delhi-National Capital Region population with newer proposed classification of mandibular impacted third molar: A retrospective study. Nat. J. Maxillofac. Surg. 2019, 10, 59. [Google Scholar]
- Jiao, L.; Zhang, F.; Liu, F.; Yang, S.; Li, L.; Feng, Z.; Qu, R. A survey of deep learning-based object detection. IEEE Access 2019, 7, 128837–128868. [Google Scholar] [CrossRef]
- He, X.; Zhao, K.; Chu, X. AutoML: A survey of the state-of-the-art. Knowl. Based Syst. 2021, 212, 106622. [Google Scholar] [CrossRef]
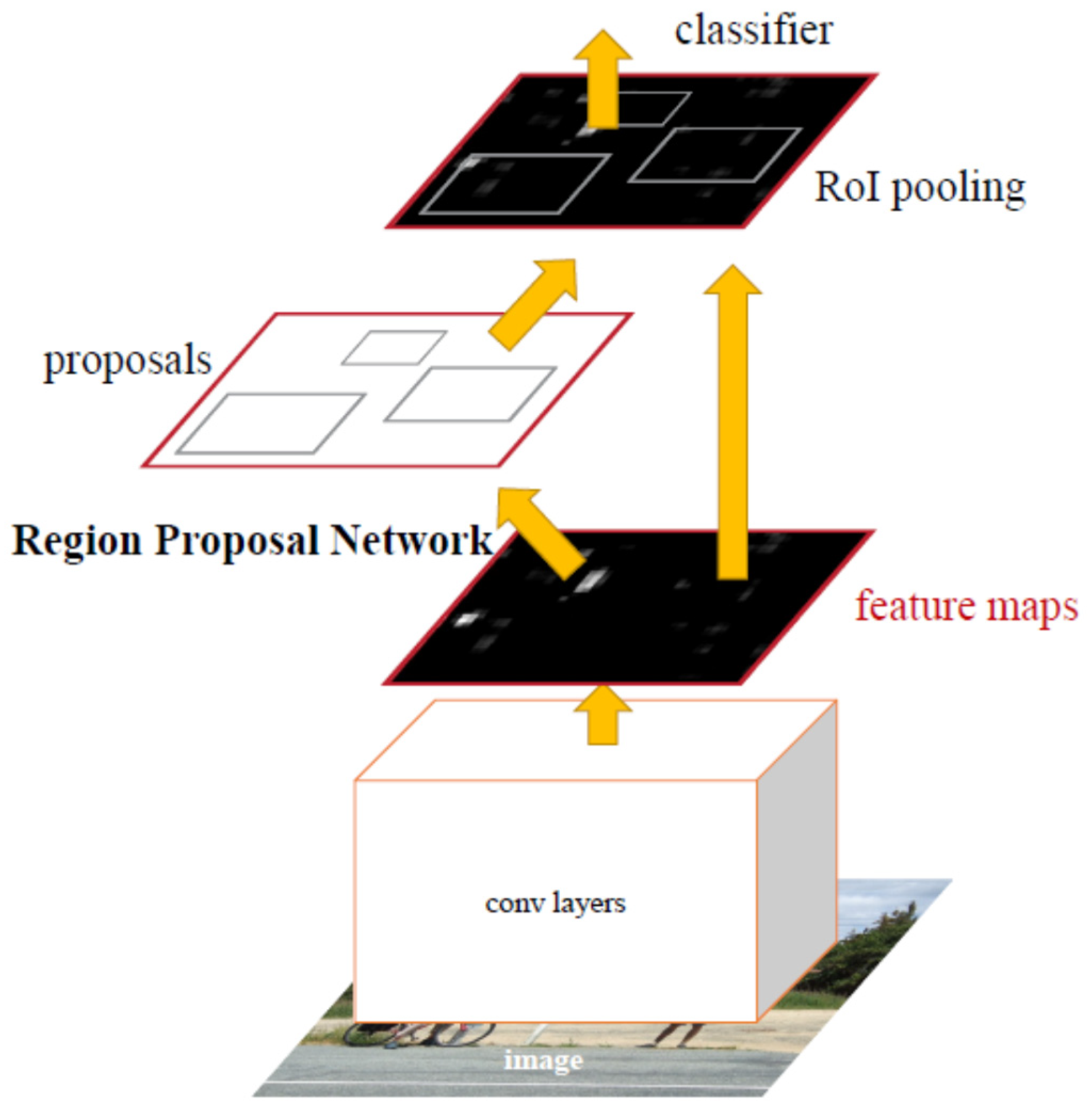
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 2015, 28, 91–99. [Google Scholar] [CrossRef] [Green Version]
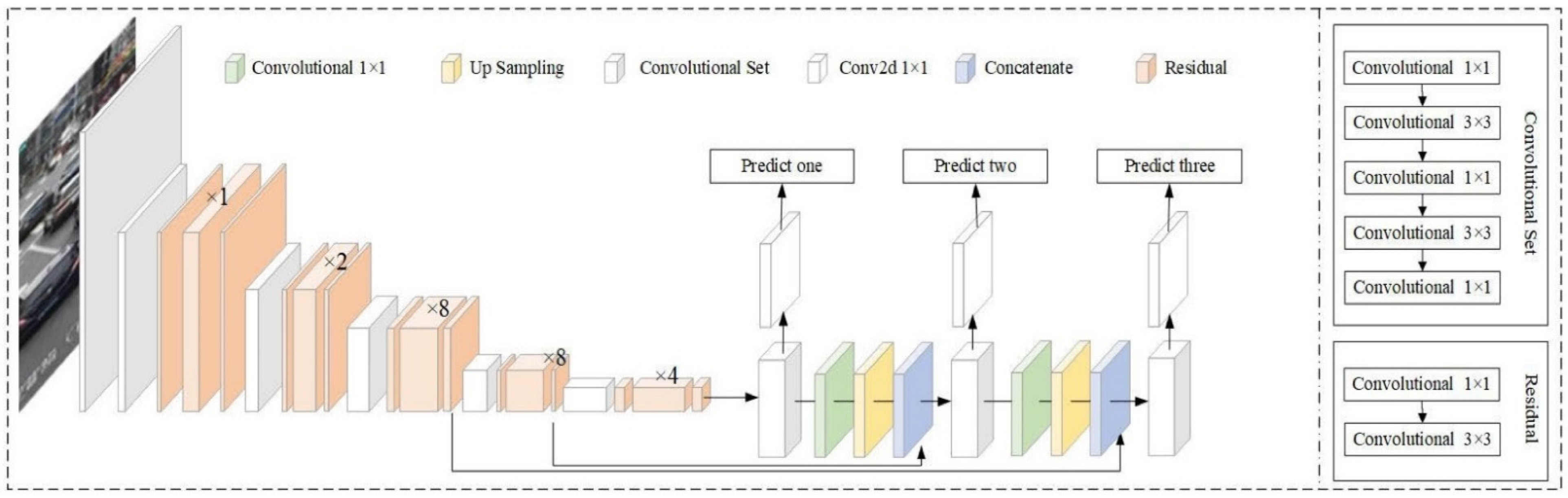
- Redmon, J.; Farhadi, A. YOLOv3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Computer Vision–ECCV 2016, ECCV 2016 Lecture Notes in Computer Science; Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; Springer: Cham, Switzerland, 2016; Volume 9905. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. In Proceedings of the 25th International Conference on Neural Information Processing Systems-Volume 1 (NIPS’12), Red Hook, NY, USA, 3–6 December 2012; p. 25. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Mao, Q.C.; Sun, H.M.; Liu, Y.B.; Jia, R.S. Mini-YOLOv3: Real-time object detector for embedded applications. IEEE Access 2019, 7, 133529–133538. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 24–27 June 2014; pp. 580–587. [Google Scholar]
- Everingham, M.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal visual object classes (VOC) challenge. Int. J. Comput. Vis. 2009, 88, 303–338. [Google Scholar] [CrossRef] [Green Version]
- Bell, S.; Zitnick, C.L.; Bala, K.; Girshick, R. Inside-outside net: Detecting objects in context with skip pooling and recurrent neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2874–2883. [Google Scholar]
- Huang, J.; Rathod, V.; Sun, C.; Zhu, M.; Korattikara, A.; Fathi, A.; Murphy, K. Speed/accuracy trade-offs for modern convolutional object detectors. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7310–7311. [Google Scholar]
- Van Etten, A. Satellite imagery multiscale rapid detection with windowed networks. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision (WACV), Waikoloa Village, HI, USA, 7–11 January 2019; pp. 735–743. [Google Scholar]
- Ekert, T.; Krois, J.; Meinhold, L.; Elhennawy, K.; Emara, R.; Golla, T.; Schwendicke, F. Deep learning for the radiographic detection of apical lesions. J. Endod. 2019, 45, 917–922. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.H.; Kim, D.H.; Jeong, S.N.; Choi, S.H. Diagnosis and prediction of periodontally compromised teeth using a deep learning-based convolutional neural network algorithm. J. Periodontal Implant. Sci. 2018, 48, 114–123. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- De Tobel, J.; Radesh, P.; Vandermeulen, D.; Thevissen, P.W. An automated technique to stage lower third molar development on panoramic radiographs for age estimation: A pilot study. J. Forensic Odontol. Stomatol. 2017, 35, 42. [Google Scholar]
- Wang, R. Edge detection using convolutional neural network. In Advances in Neural Networks–ISNN 2016, Proceedings of the 13th International Symposium on Neural Networks, ISNN 2016, St. Petersburg, Russia, 6–8 July 2016; Springer International Publishing: Cham, Switzerland, 2016; pp. 12–20. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fold | mAP@0.5 | mAP@0.5:0.95 | |
|---|---|---|---|
| One-stage technique | |||
| YOLOv3 | 1 | 0.941 | 0.751 |
| 2 | 0.979 | 0.783 | |
| 3 | 0.936 | 0.746 | |
| 4 | 0.981 | 0.761 | |
| 5 | 0.98 | 0.771 | |
| Avg | 0.96 | 0.76 | |
| Two-stage technique | |||
| Faster RCNN–ResNet50 | 1 | 0.912 | 0.628 |
| 2 | 0.904 | 0.673 | |
| 3 | 0.86 | 0.646 | |
| 4 | 0.944 | 0.71 | |
| 5 | 0.953 | 0.713 | |
| Avg | 0.91 | 0.71 | |
| Faster RCNN–AlexNet | 1 | 0.814 | 0.433 |
| 2 | 0.878 | 0.518 | |
| 3 | 0.773 | 0.47 | |
| 4 | 0.916 | 0.52 | |
| 5 | 0.923 | 0.513 | |
| Avg | 0.86 | 0.49 | |
| Faster RCNN–VGG16 | 1 | 0.838 | 0.464 |
| 2 | 0.89 | 0.486 | |
| 3 | 0.802 | 0.423 | |
| 4 | 0.898 | 0.484 | |
| 5 | 0.937 | 0.583 | |
| Avg | 0.87 | 0.49 | |
| Fold | YOLOv3 | Faster RCNN–ResNet50 | Faster RCNN–AlexNet | Faster RCNN–VGG16 |
|---|---|---|---|---|
| 1 | 0.824 | 0.814 | 0.636 | 0.674 |
| 2 | 0.86 | 0.727 | 0.68 | 0.693 |
| 3 | 0.834 | 0.713 | 0.529 | 0.653 |
| 4 | 0.897 | 0.856 | 0.76 | 0.736 |
| 5 | 0.891 | 0.854 | 0.81 | 0.792 |
| Avg | 0.86 | 0.79 | 0.68 | 0.7 |
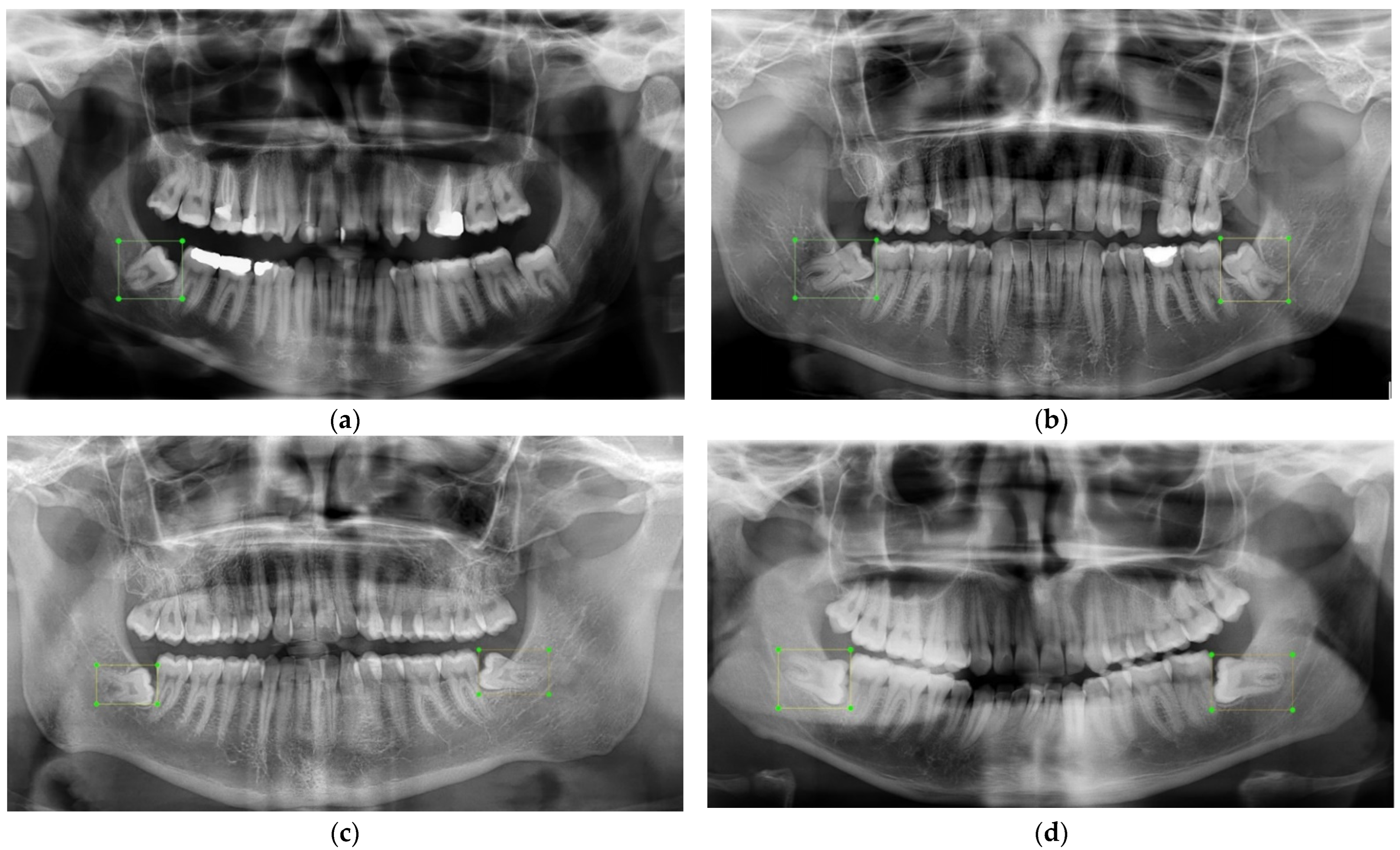
| Class | AP@0.5 | AP@0.5:0.95 | Precision | Recall |
|---|---|---|---|---|
| t1—mesioangular left | 0.96 | 0.774 | 0.849 | 0.95 |
| t4—horizontal left | 0.98 | 0.775 | 0.96 | 0.833 |
| t5—mesioangular right | 0.984 | 0.793 | 0.908 | 0.987 |
| t8—horizontal right | 0.995 | 0.791 | 0.88 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Celik, M.E. Deep Learning Based Detection Tool for Impacted Mandibular Third Molar Teeth. Diagnostics 2022, 12, 942. https://doi.org/10.3390/diagnostics12040942
Celik ME. Deep Learning Based Detection Tool for Impacted Mandibular Third Molar Teeth. Diagnostics. 2022; 12(4):942. https://doi.org/10.3390/diagnostics12040942
Chicago/Turabian StyleCelik, Mahmut Emin. 2022. "Deep Learning Based Detection Tool for Impacted Mandibular Third Molar Teeth" Diagnostics 12, no. 4: 942. https://doi.org/10.3390/diagnostics12040942
APA StyleCelik, M. E. (2022). Deep Learning Based Detection Tool for Impacted Mandibular Third Molar Teeth. Diagnostics, 12(4), 942. https://doi.org/10.3390/diagnostics12040942