1. Introduction
In fluoroscopic imaging, flat-panel (FP) dynamic detectors can acquire X-ray image sequences with frame rates higher than 300 frames per second (fps) [
1]. However, the sequentially acquired images have lag signals from previous frames [
1,
2]. For indirect detectors, trapping charges in the amorphous structure of the thin-film-transistor (TFT) panel and incomplete reads are the main causes of lag signals [
3,
4,
5,
6]. The lag artifacts appear in the form of temporal blurring and ghosting in fluoroscopic imaging [
7,
8,
9,
10,
11,
12,
13].
In measuring the noise power spectrum (NPS) for a dynamic detector [
14,
15,
16], the lag signal lowers the NPS curve. Conventional approaches for correcting the measured NPS are based on using the lag correction factor (LCF) [
13,
17,
18,
19,
20,
21]. Busse et al. [
19,
20] used a temporal power spectral density (PSD) method to measure LCF using steady-state images based on a moving average model of order
L (MA(
L)) for the lag signals. This PSD method is adopted in the IEC62220-1-3 standard [
22]. Recently, Kim and Lee [
21] proposed an LCF measurement method using a series of the Pearson correlation coefficients based on the MA(
L) model. Based on an autoregressive model of order 1 (AR(1)), Matsunaga et al. [
17] considered LCF measurements. Granfors and Aufrichtig [
18], as well as Kim and Lee [
13], considered the means of transient decaying images after the X-ray turns off.
Because of the nonuniform temporal gain (NTG) from inconsistent X-ray sources and readout circuits, accurately measuring PSD curves as well as correlations for LCF is difficult. In particular, the PSD method [
19] is very sensitive to NTG because the temporal spectrum at low frequencies has unusually high values. Hence, applying a gain correction is important in obtaining an accurate LCF [
19]. Compared to the PSD case, the correlation method [
21] is less sensitive to NTG even though a gain correction is required. On the other hand, the mean-based methods are generally insensitive to NTG [
13,
18].
In this paper, we analyze effects of NTG on the correlation-based methods [
21]. Formulating a mathematical NTG model, the effects on measuring the correlations are observed. We also theoretically observe that a scheme called the upper-lower (U-L) correction can efficiently alleviate the NTG problem. We then propose an LCF measurement method based on the correlation method considering estimates from conditional covariances. This algorithm can efficiently measure LCF without applying any gain correction schemes. We extensively conducted experiments using real X-ray images acquired from a dynamic detector.
This paper is organized in the following way. In
Section 2, the definitions on LCF for the MA(
L) and AR(1) models are introduced. An NTG model is formulated and theoretical analyses are conducted in
Section 3, and an LCF measurment algorithm is proposed in
Section 4. Experimental results are shown in
Section 5, and the paper is concluded in the last section.
2. Lag Correction Factors
In this section, we formulate two lag models based on MA(L) and AR(1) for introducing the LCF definitions, respectively.
For a pixel position
, let
denote a signal that is independent and identically distributed. We first consider a linear lag model of MA(
L). The MA(
L) model [
18] with a signal
is defined as
where
is a causal system, such that
with nonnegative
. Here,
has
pixels and represents the
nth X-ray image acquired under specified irradiation conditions with uniform intensity. Let
and
denote the periodogram means of
and
, respectively [
23]. The periodogram means then satisfy
, where
is the LCF under the MA(
L) model and is defined as
. By using this LCF, we can asymptotically correct the measured NPS to obtain the true NPS from
[
24], where
and
are the NPS curves of
g and
f, respectively. Let
denote the autocorrelation of
with the frame lag
ℓ defined as
Kim and Lee [
21] showed that the LCF of
can be a function of
as
Obtaining the autocovariance of
is enough to calculate the autocorrelation
of Equation (
2) and thus the LCF of Equation (
3).
We now consider a linear lag model based on AR(1). The acquired image
can be described from the AR(1) model point of view [
17] as
From Equation (
4), we can obtain a relationship of
, where
is the LCF under the AR(1) model and is defined as
. We can obtain
a of AR(1) from the autocorrelation as
, and the resultant
can also be a function of
as
Note that we can also obtain
a from image means for transient decaying frames after the X-ray turns off. By using the LCF of Equation (
5), we can also correct the measured NPS to obtain the true NPS. For relatively small values of
,
holds. In other words, we can obtain an approximation of
for
from Equations (
3) and (
5) if
is relatively small and thus obtain an approximate LCF value using a coefficient
, as discussed by Granfors and Aufrichtig [
18].
3. Nonuniform Temporal Gain Model
For appropriately measured autocorrelations, measuring LCF from Equations (
3) or (
5) can be insensitive to various noises compared to the PSD method [
19]. In this section, theoretical analyses are conducted on this sensitivity property to NTG.
In calculating
, various noises, such as NTG, can make accurate LCF measurements difficult. In order to mathematically describe NTG, we introduce a weakly stationary random sequence
with mean
and variance
, and we modify the image model of Equations (
1) or (
4) considering NTG as [
21]
where
is a signal with NTG, and
is independent of the pixel values
. In the NTG model of Equation (
6), we can practically assume that
. Hence, we can obtain an approximation of
. The signal-to-noise ratio,
, is very high in practical fluoroscopic imaging. Hence, this NTG can be ignored in the mean-based LCF measurement methods [
13,
17,
18]. However, the PSD or correlation-based methods can be very sensitive to NTG even though its strength is quite weak [
21].
In estimating the autocovariance
for
in Equation (
2), we can instead measure
using the acquired image
and can have a bias of
as derived in
Appendix A. Hence, we cannot accurately calculate
for the LCF values of Equations (
3) and (
5) if we use the autocovariance of
due to the bias from NTG.
To reduce the biases from NTG, we can estimate the gain
from a conditional mean
and can then directly correct NTG from dividing
by
[
19]. Instead of this direct correction, we can use a notion from the image differences, as described by Kim [
25] and Kim and Lee [
26], for a weak gain. For an image
with
pixels, the image difference
between the upper and lower pixels can be calculated as
for the upper image positions of
, where
implies the lower image part. In Equation (
7), we assume that the pixels that are separated by
pixels are mutually uncorrelated or are
-mixing [
27]. The autocovariance of
approximately satisfies
, as shown in
Appendix B. Hence, by conducting a preprocessing on the difference
, we can accurately estimate LCF regardless of the influence of NTG. Here, we call the preprocessing the U-L correction. The measured autocorrelation can now be given as
using the difference
of Equation (
7).
4. Estimates Based on Conditional Covariance
In this section, we propose a method based on conditional covariance for an unbiased estimate of
in Equation (
2) to alleviate the NTG problem besides the direct and U-L corrections. The conventional schemes of the direct and U-L corrections are applied to the input signal as preprocessing approaches. Estimates of
are next obtained to calculate
. However, the proposed method can obtain unbiased estimates of
even for the NTG environment based on conditional covariance.
A conditional covariance
can be expanded as
for
. From the assumption on
,
holds. Hence, we can obtain an approximation for the conditional covariance as
and use the conditional covariance as an unbiased estimate of
for calculating
. We now introduce the proposed algorithm as follows. For
N frames of
, where
, we can asymptotically estimate the covariances on
from empirical sum of
as
N and
U increase. Using the
N image samples of
, an empirical covariance,
where
is an empirical mean defined as
, can be used as an estimate of
. As mentioned in
Appendix A, the estimate from Equation (
9) has a bias of
in estimating
.
On the other hand, the conditional covariance of Equation (
8) can be empirically estimated from an empirical estimate:
where
is an empirical mean defined as
. Based on the conditional covariance of (
8) and its empirical estimate Equation (
10), we can calculate the autocorrelation
of Equation (
2) and obtain the LCF values from Equations (
3) or (
5). The proposed LCF measurement method within a framework of the correlation-based methods [
17,
21] is now summarized as follows.
Conditional Covariance Algorithm:
- (1)
For a given X-ray image sequence
, calculate the empirical estimate with Equation (
10) for the conditional covariance
.
- (2)
Using the empirical estimates, calculate
to obtain the LCF of
from (
3) or
from Equation (
5).
From this Conditional Covariance Algorithm with the correlation-based methods, we can obtain accurate LCF values without applying the direct or U-L correction preprocessing.
5. Experimental Results
In this section, we introduce experimental results for analyzing the NTG effect on estimating LCF. We used a CsI(Tl)-scintillator FP dynamic detector (DRTECH Co., Ltd., Sungnam-si, Korea), where amorphous In-Ga-Zn-O thin-film transistors control the photodiode pixels. At frame rates of 10 fps and 30 fps, X-ray image sequences for various incident exposures were acquired under the RQA 5 condition of IEC62220-1-3 [
22] and a continuous fluoroscopy mode for a continuous X-ray source.
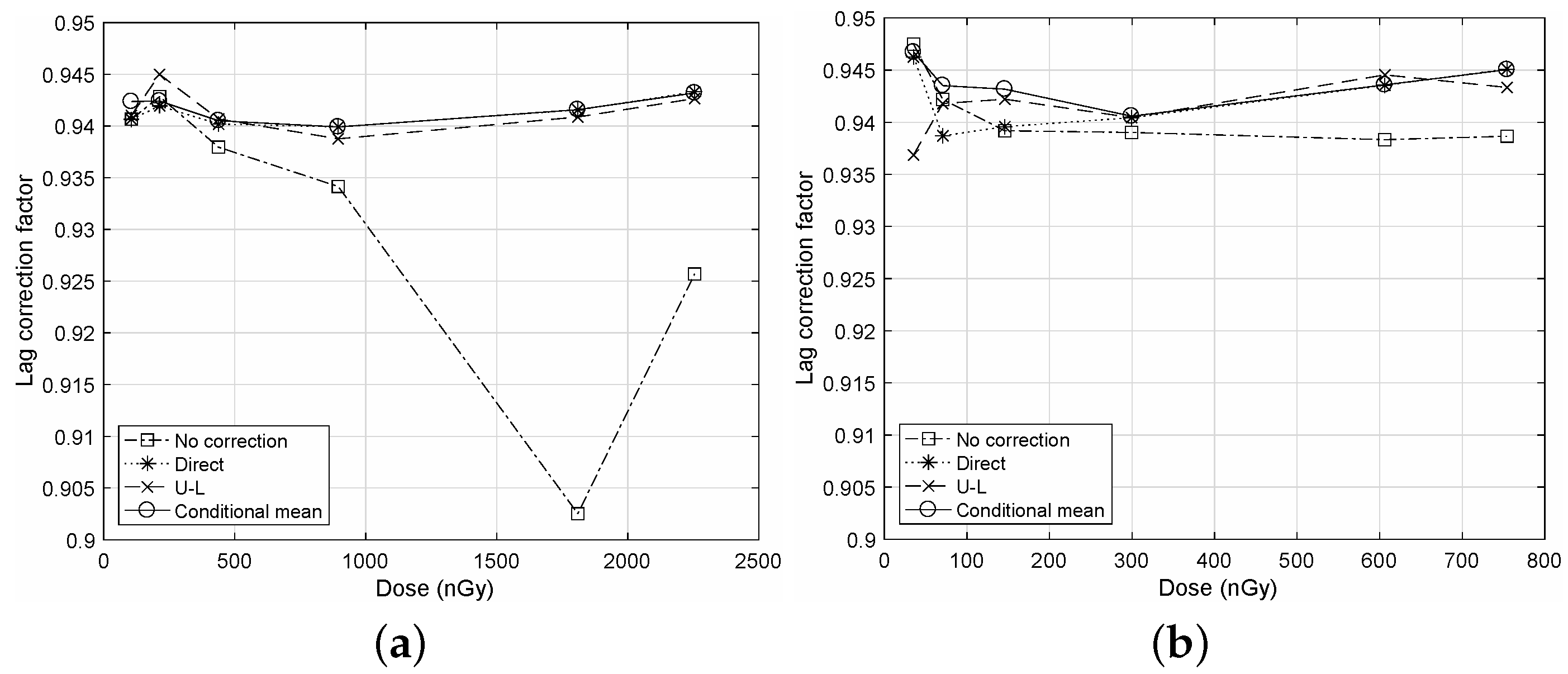
In
Figure 1, we illustrate a comparison of the LCF measurements for the different NTG corrections to show the correction performance of the proposed algorithm. Here, the calculated autocorrelation
are applied to
of Equation (
3) to obtain LCF. We can observe that the proposed algorithm yields LCF values that are very close to that of the direct correction as “Conditional mean” and “Direct”. However, without the NTG correction, we can observe from “No correction” that the resultant LCF values have significant deviations from those of the corrected cases due to the bias term described in
Appendix A. For both cases of frame rates in
Figure 1a,b, we can observe similar results on the proposed algorithm.
6. Discussions
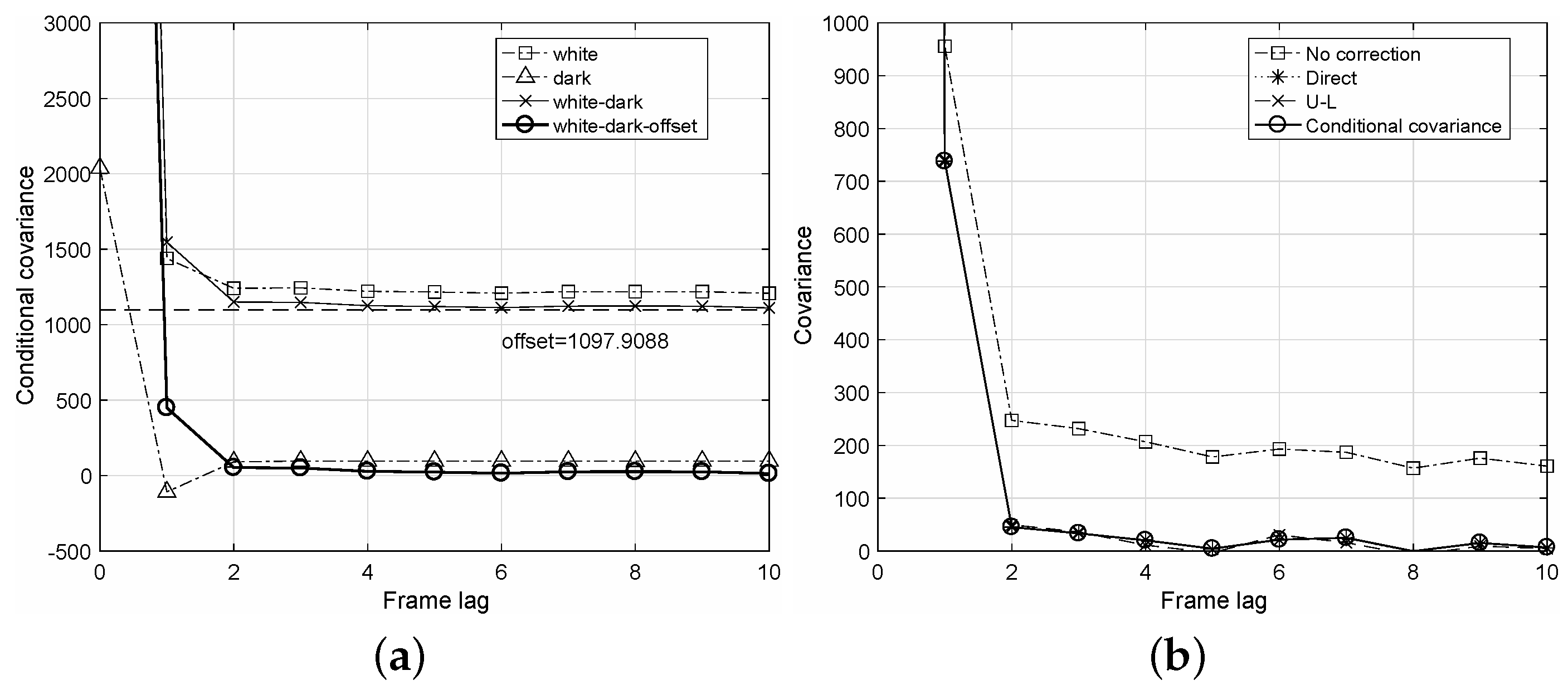
In practical calculations of the conditional covariance
, further careful steps are required. Let the white image imply an image acquired at uniform exposure to the detector and the dark image imply an image acquired without exposures. From Step 1) of the algorithm, we first calculate the conditional covariances for both white and dark sequences, respectively, as “white” and “dark” in
Figure 2a. Here, considering the dark conditional covariance is important because it can have negative values. We next calculate their difference as “white-dark” and then obtain a variance offset of the difference for relatively large frame lags of
ℓ. The final conditional covariance is obtained by subtracting the variance offset from the difference as “white-dark-offset” in
Figure 2a. Note that the variance offset in the conditional covariance occurs because of a fixed pattern noise, which is independent of the image frames [
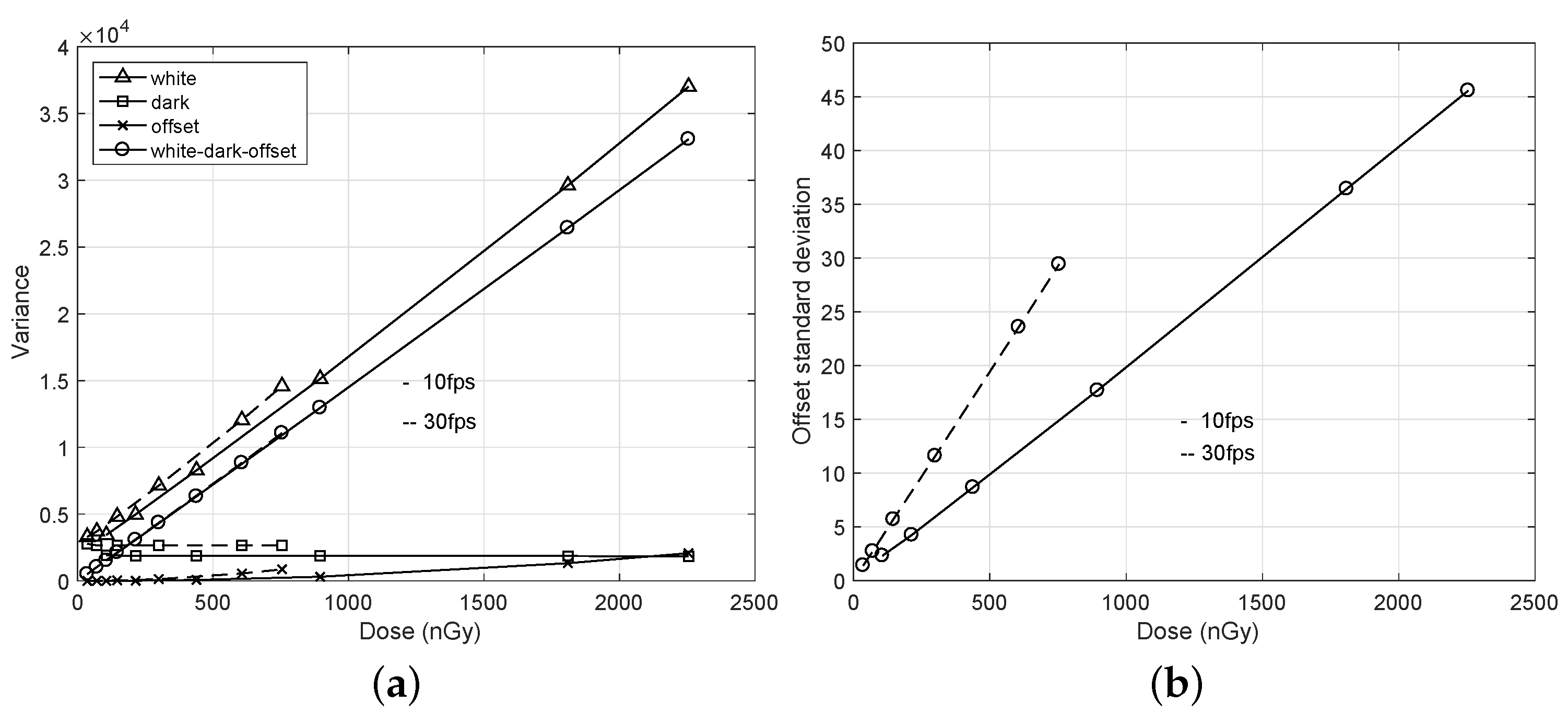
21]. As shown in
Figure 3a, extracting the variance offset can guarantee a linearity of the variance curve as “white-dark-off”. The standard deviation of this noise, i.e., the root square of the variance offset, is proportional to the incident dose, as shown in
Figure 3b. In
Figure 2b, estimated conditional covariances are compared. Without any NTG corrections, the conditional covariance curve shows a bias due to NTG. The proposed algorithm could achieve a curve that is very close to those of the conventional direct and U-L corrections.
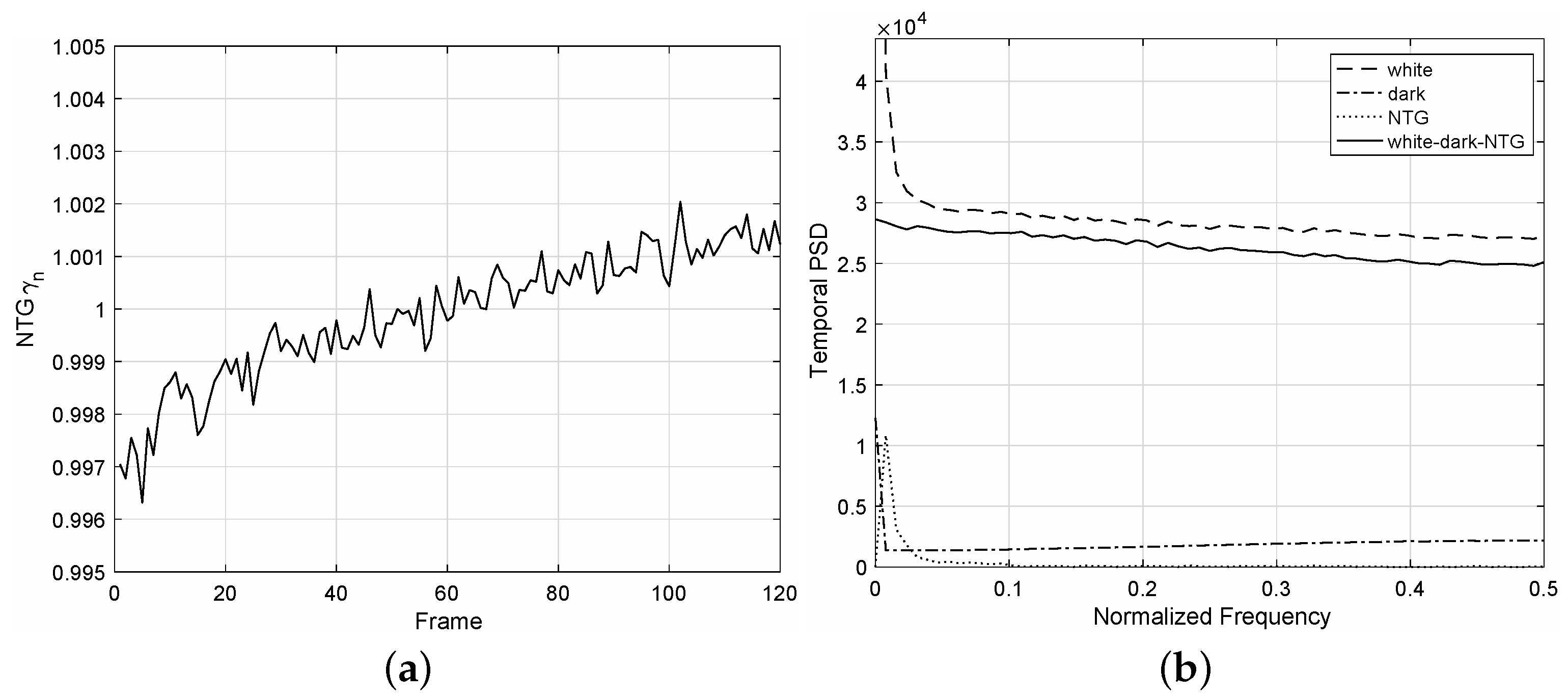
For an image sequence acquired at an incident dose of 1809.5 nGy, we estimated the NTG signal
from the conditional mean
. As shown in
Figure 4a, the NTG curve
is noisy and is even slightly increasing. Hence, the temporal PSD of
has high values, especially at low frequencies, as shown in
Figure 4b, and these values can produce high errors in obtaining LCF from the PSD method [
19,
21]. The variance of
satisfies
, and thus, the assumption
is practically reasonable. The bias in estimating
from
is
for a signal mean of
= 15,110. From the proposed algorithm, the LCF is 0.9416, which is similar to those of the direct and U-L corrections. If we do not apply any NTG correction schemes, then the LCF is given as 0.9025, which is significantly lower than the proposed case. As a comparison, the line-estimate method [
13], which is based on means, yields 0.9398.
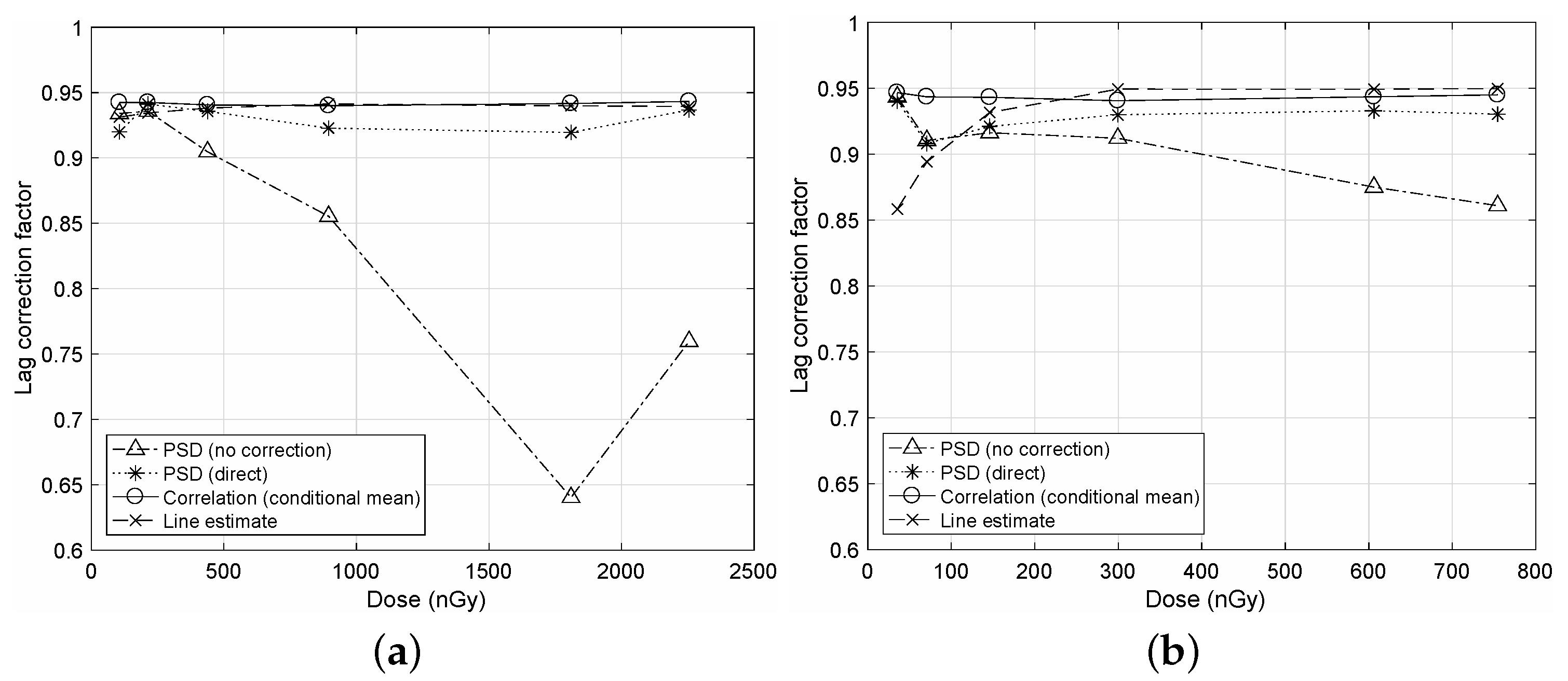
In
Figure 5, a comparison on the NTG correction for the PSD method, which is adopted in IEC62220-1-3, is illustrated. As previously mentioned in the temporal PSD of
Figure 4b, we notice that the PSD method is very sensitive to NTG as “PSD (no correction)”. Hence, the direct or U-L correction is required for the PSD method as “PSD (direct)”. Even though the NTG correction is conducted, the PSD method showed deviations from the proposed case. The LCF values from the proposed algorithm are very close to those of the line estimate method [
13]. Note that the line estimate method is insensitive to NTG but uses transient decaying image frames after the X-ray tube tunes off from a continuous X-ray source.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}