
A Survey on Fault Diagnosis and Fault-Tolerant Control Methods for Unmanned Aerial Vehicles †



Abstract
:1. Introduction
1.1. Glossary
- Fault: An unpermitted deviation from the normal, acceptable, usual, and standard behavior [4].
- Failure: A permanent interruption of a system’s ability to perform a require function under specified operating conditions [4].
- Malfunction: An intermittent irregularity in the fulfillment of a system’s desired function [4].
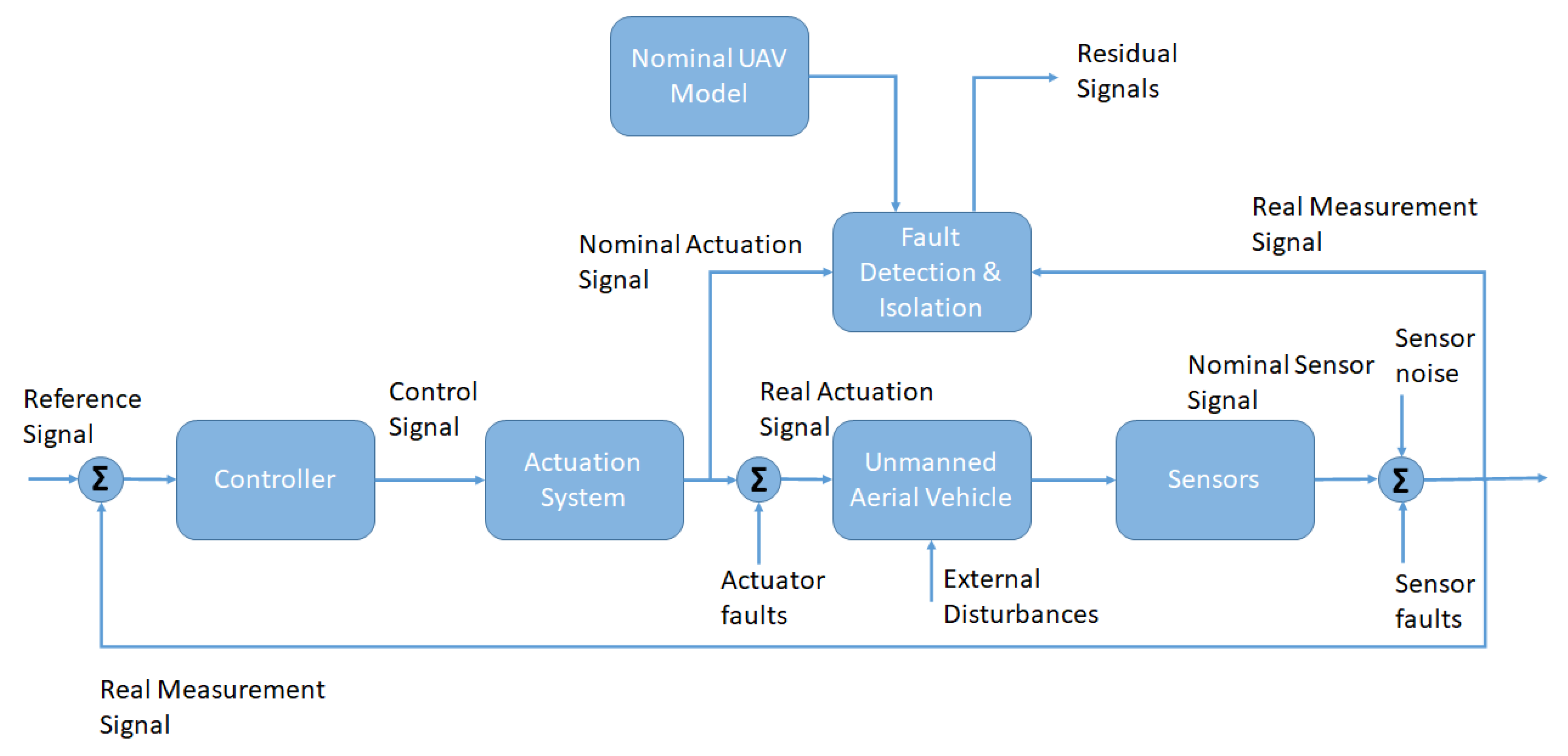
- Fault detection: detection of the occurrence of faults in the functional units of the process, which lead to undesired or intolerable behavior of the whole system.
- Fault isolation: localization (classification) of different faults.
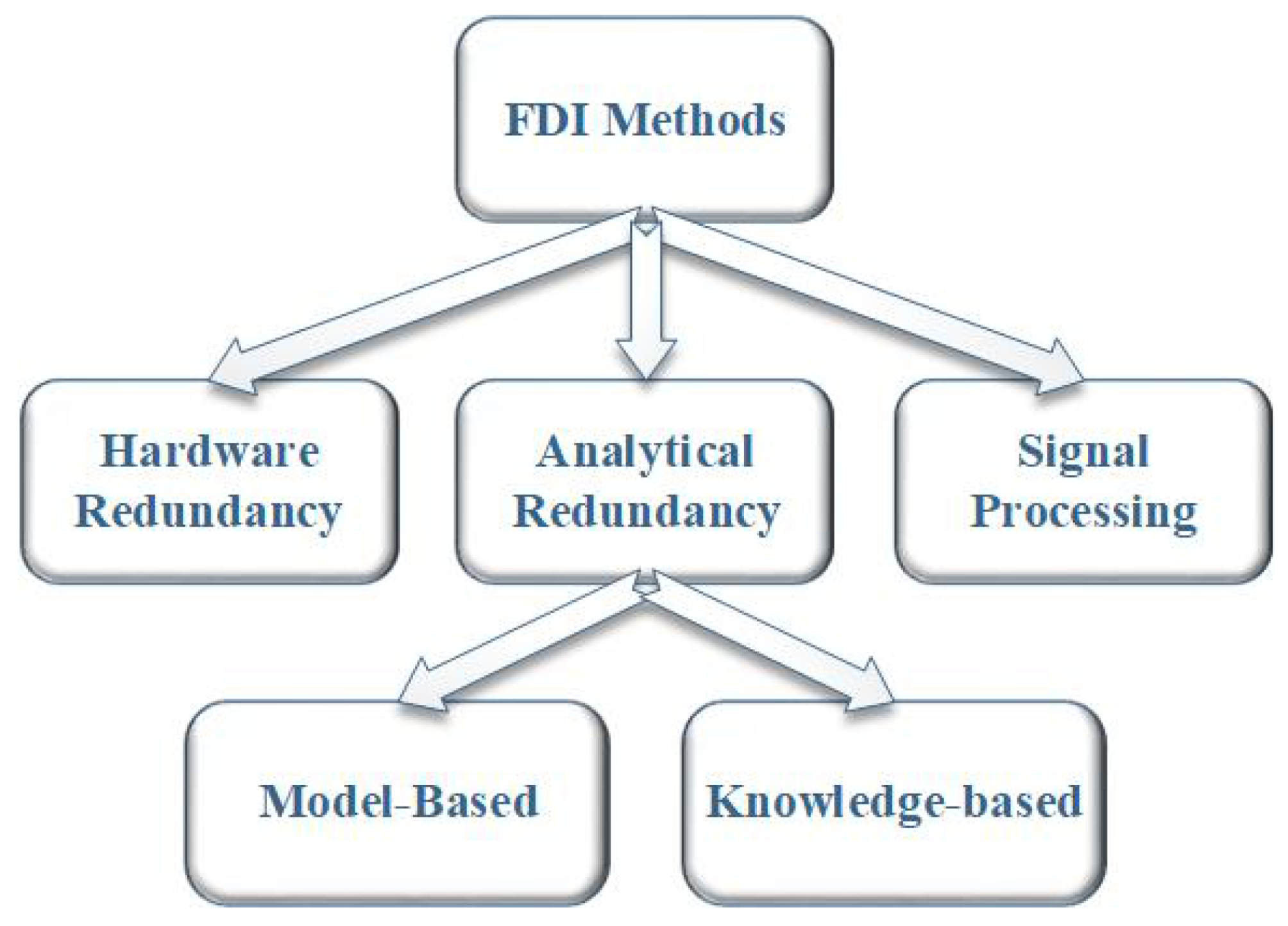
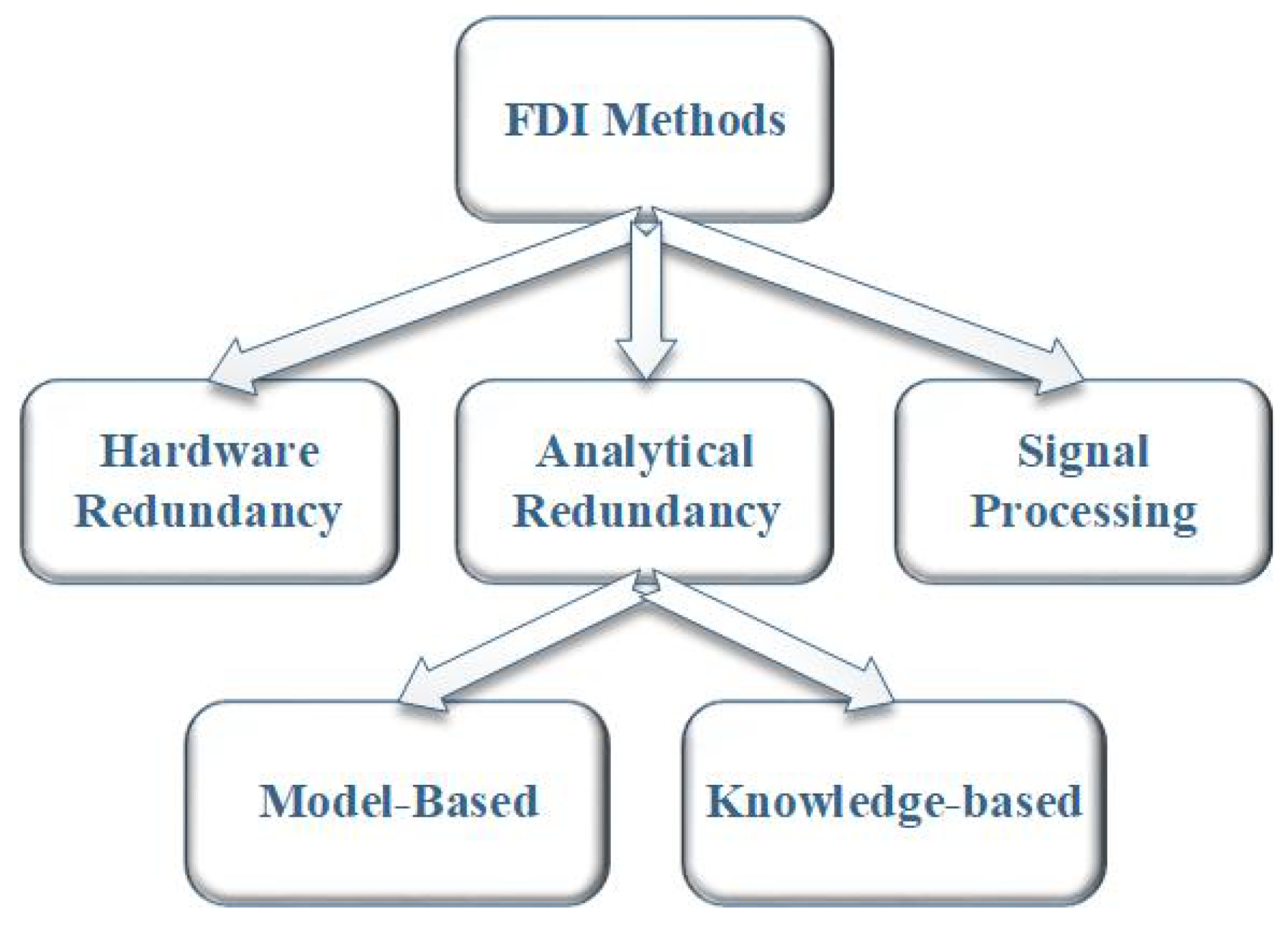
- Hardware redundancy: consists in the reconstruction of the process components using the identical (redundant) hardware components. A fault in the process component is then detected if the output of the process component is different from the one of its redundancy. The main advantage of this scheme is its high reliability and the direct fault isolation.
- Analytical redundancy: makes use of the model of the process where process model is a quantitative or a qualitative description of the process dynamic and steady behavior. In this review the analytical redundancy is divided into two categories: model-based methods and knowledge-based.
- –
- Model-based methods are based on a mathematical model obtained through physical laws or system identification methods and fault diagnosis is achieved using residual that are formed by the difference between the measured signals and the signals generated by the mathematical model.
- –
- Knowledge-based methods are not dependent on the system model and require a significant amount of previous system performance data while the expert knowledge and expertise may be effectively used in the diagnostic procedure.
- Signal processing: uses signal measurements instead of a system model. The measured signals are considered to contain information about faults that exist in the system in a form of symptoms. From these signals, their characteristics are extracted and the fault diagnosis is made with appropriate signal processing, symptom analysis and prior knowledge of the symptoms of healthy systems [6].
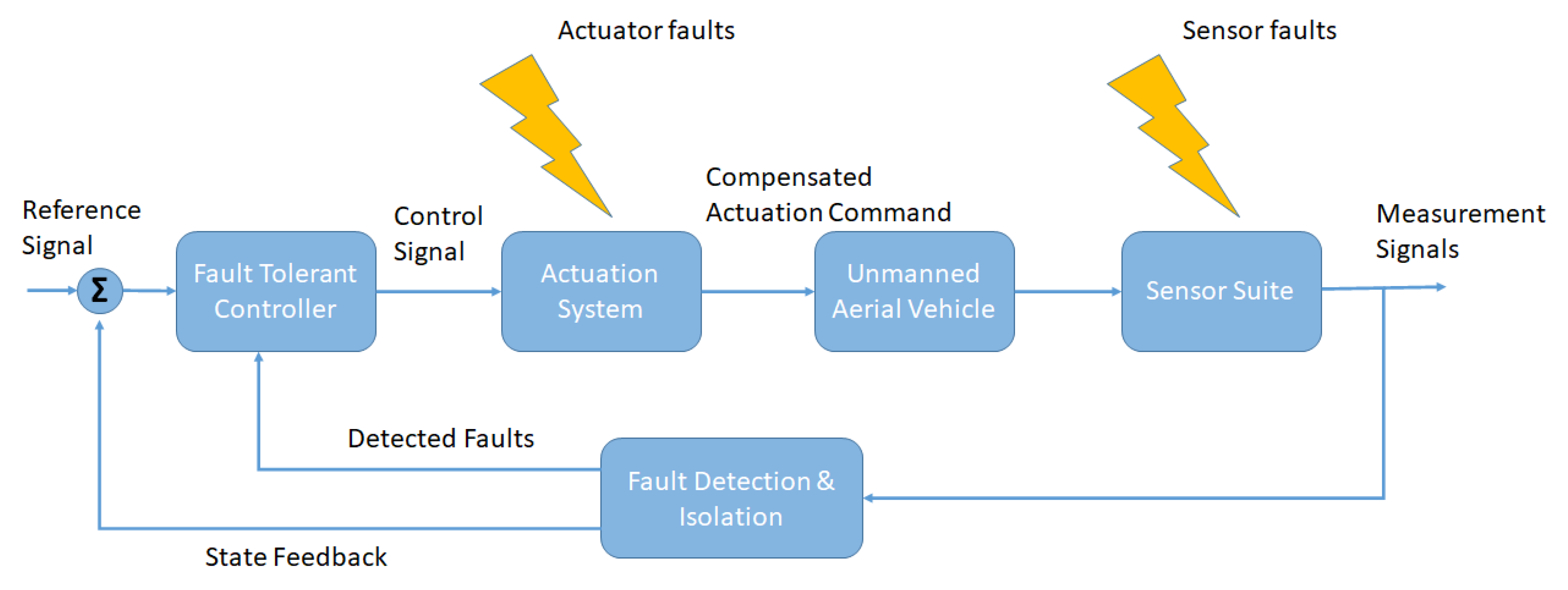
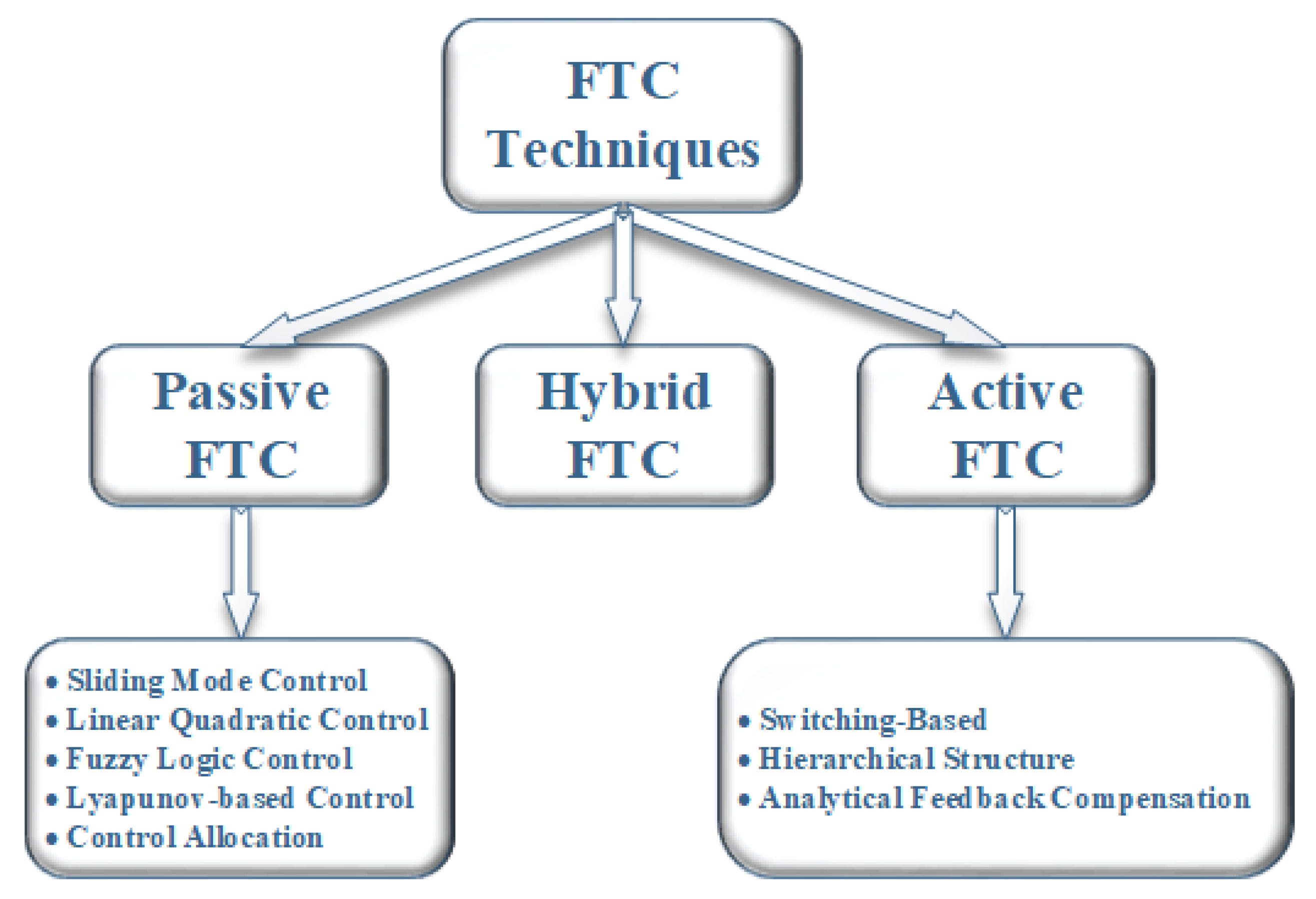
- Passive FTC: A control system that does not rely on faulty information to control the system and is closely related to robust control where a fixed controller is designed to be robust against a predefined fault in the system and usually redundancy is integrated into the passive FTC scheme to make it resilient against faults [7].
- Active FTC: A control system that uses an FDI module to detect and isolate the fault while a supervisory controller decides how to modify the control structure and parameters to compensate for the occurred fault in the system [7].
1.2. Outline
2. Existing Survey Studies
3. Sensors Fault Diagnosis
4. Actuators Fault Diagnosis
5. Fault Tolerant Control Methods in UAVs
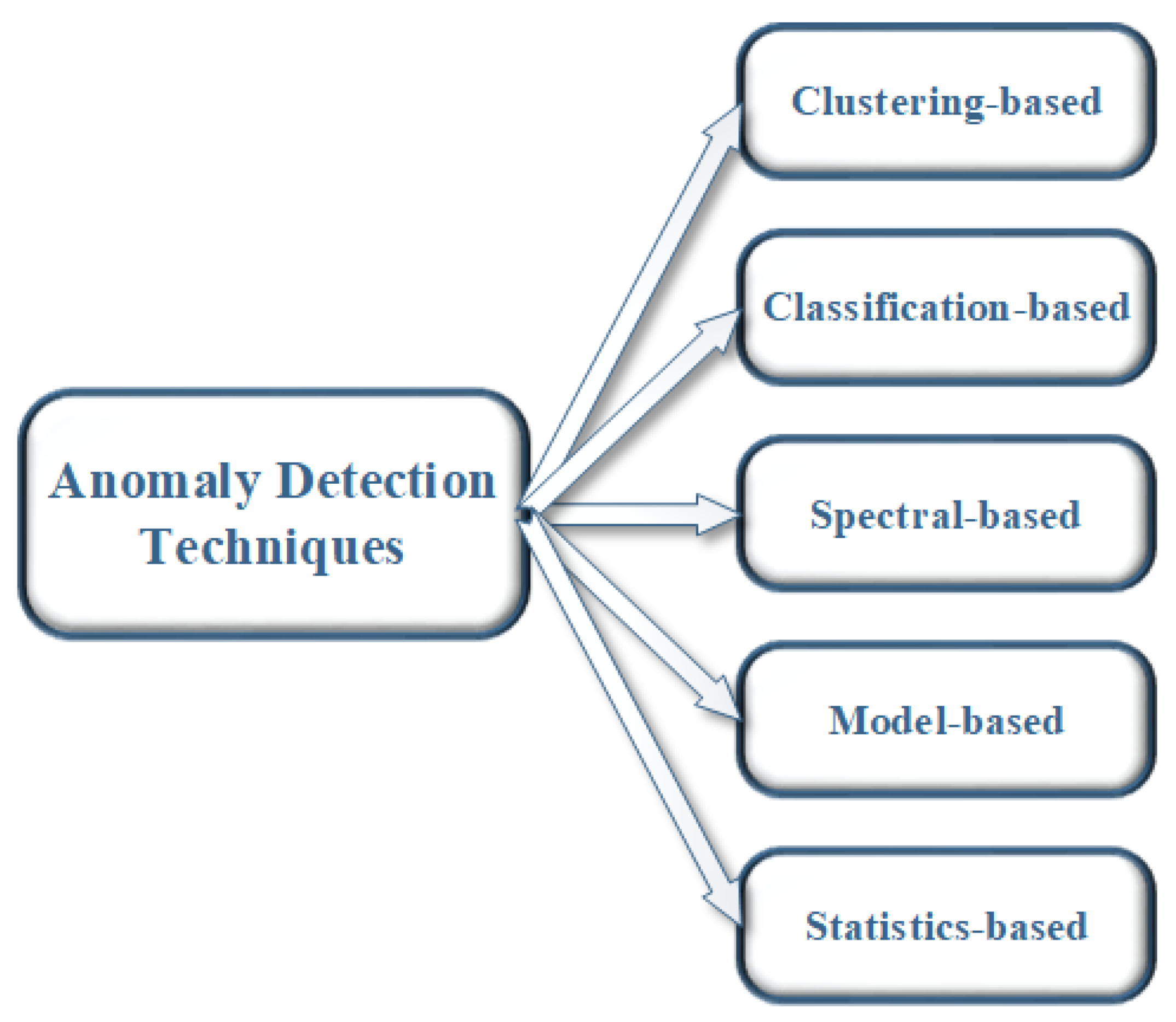
6. Anomaly Detection in UAVs
7. Discussion and Conclusions
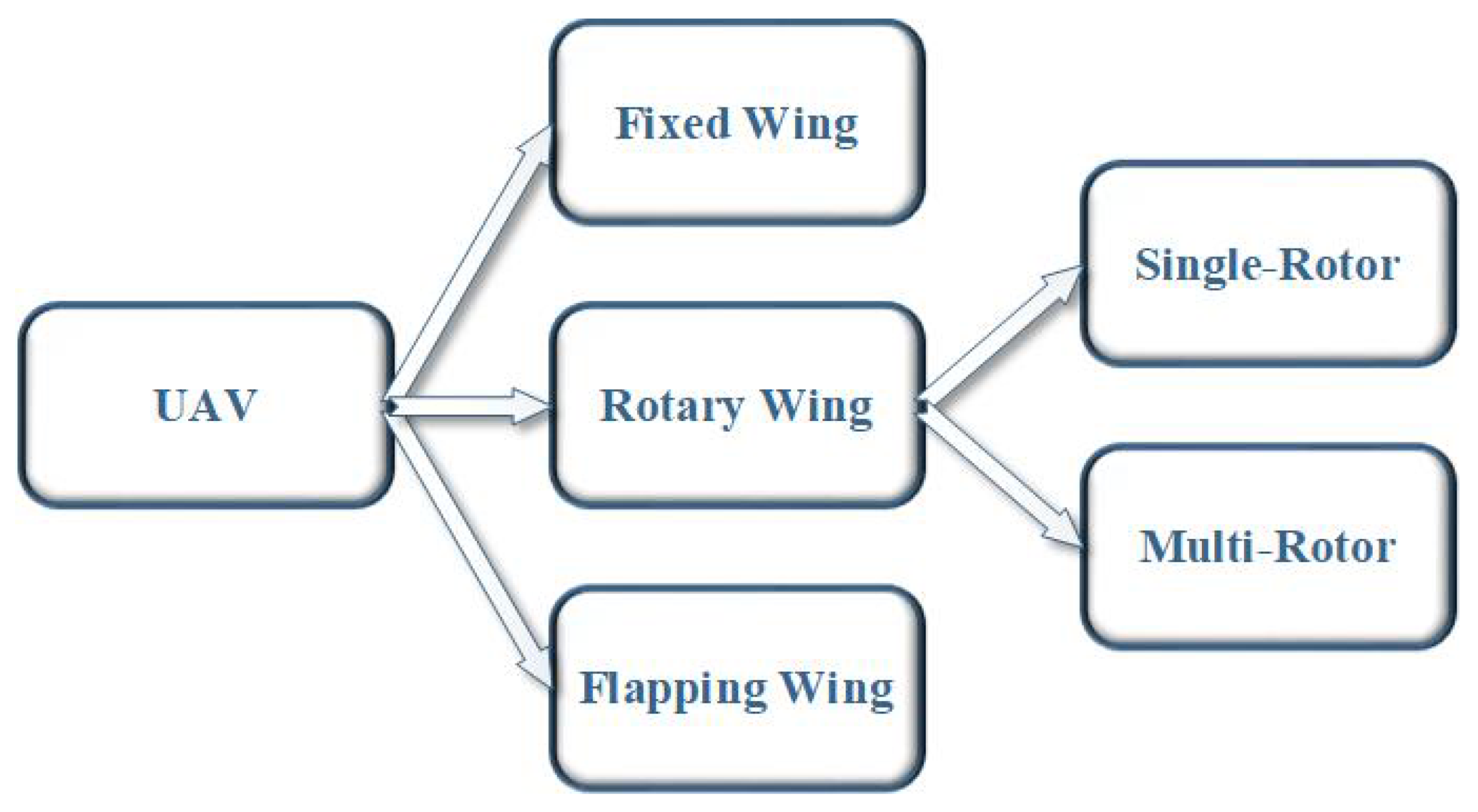
- in a percentage of 51% the research works concern Rotary Wing vehicles, while the remaining 39% concern Fix-Wing and Misc. 10%;
- regarding the type of sensor, 39% concerns IMU; and, finally,
- the most commonly used methods are Model-Based with a percentage of 71%.
- in a percentage of 50% the research works concern Rotary Wing vehicles, while the 37% concern Fix-Wing, 7% VTOL and 7% Misc.;
- regarding the type of actuator, 67% concerns Rotor/Motor, 23% Elevator, Ailerons, Rudder and a percentage of 10% Misc. and finally;
- the most commonly used methods are Model-Based with a percentage of 87%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, M.; Zhang, X.; Xiong, X.; Zeng, F.; Zhuang, W. Transformer: A Multifunctional Fast Unmanned Aerial Vehicles–Unmanned Surface Vehicles Coupling System. Machines 2021, 9, 146. [Google Scholar] [CrossRef]
- Ding, S.X. Model-Based Fault Diagnosis Techniques: Design Schemes, Algorithms and Tools; Springer: London, UK, 2013. [Google Scholar]
- Shraim, H.; Awada, A.; Youness, R. A survey on quadrotors: Configurations, modeling and identification, control, collision avoidance, fault diagnosis and tolerant control. IEEE Aerosp. Electron. Syst. Mag. 2018, 33, 14–33. [Google Scholar] [CrossRef]
- Isermann, R. Fault-Diagnosis Systems; Springer: Berlin, Germany, 2006. [Google Scholar]
- Mouzakitis, A. Classification of Fault Diagnosis Methods for Control Systems. Meas. Control. 2013, 46, 303–308. [Google Scholar] [CrossRef]
- Yuan, H.; Wu, N.; Chen, X. Mechanical Compound Fault Analysis Method Based on Shift Invariant Dictionary Learning and Improved FastICA Algorithm. Machines 2021, 9, 144. [Google Scholar] [CrossRef]
- Abbaspour, A.; Mokhtari, S.; Sargolzaei, A.; Yen, K.K. A Survey on Active Fault-Tolerant Control Systems. Electronics 2020, 9, 1513. [Google Scholar] [CrossRef]
- Chandola, V.; Banerjee, A.; Kumar, V. Anomaly Detection: A Survey. ACM Comput. Surv. 2009, 41. [Google Scholar] [CrossRef]
- Khan, S.; Liew, C.F.; Yairi, T.; McWilliam, R. Unsupervised anomaly detection in unmanned aerial vehicles. Appl. Soft Comput. 2019, 83, 105650. [Google Scholar] [CrossRef]
- Gao, Y.; Zhao, D.; Li, Y. UAV Sensor Fault Diagnosis Technology: A Survey. Appl. Mech. Mater. 2012, 220–223, 1833–1837. [Google Scholar] [CrossRef]
- Qi, X.; Qi, J.; Theilliol, D.; Zhang, Y.; Han, J.; Song, D.; Hua, C. A review on fault diagnosis and fault tolerant control methods for single-rotor aerial vehicles. J. Intell. Robot. Syst. 2014, 73, 535–555. [Google Scholar] [CrossRef]
- Sadeghzadeh, I.; Zhang, Y. A Review on Fault-Tolerant Control for Unmanned Aerial Vehicles (UAVs). In Proceedings of the Infotech@Aerospace 2011, St. Louis, Mo, USA, 29–31 March 2011. [Google Scholar]
- Drak, A.; Noura, H.; Hejase, M.; AL Younes, Y. Sensor fault diagnostic and Fault-Tolerant Control for the altitude control of a quadrotor UAV. In Proceedings of the 2015 IEEE 8th GCC Conference Exhibition, Muscat, Oman, 1–4 February 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Shi, H.; Hu, S.; Zhang, J. Research on Fault Diagnosis of Three Degrees of Freedom Gyroscope Redundant System. In Proceedings of the 2019 CAA Symposium on Fault Detection, Supervision and Safety for Technical Processes (SAFEPROCESS), Xiamen, China, 5–7 July 2019; pp. 232–239. [Google Scholar] [CrossRef]
- Miao, Q.; Wei, J.; Wang, J.; Chen, Y. Fault Diagnosis Algorithm Based on Adjustable Nonlinear PI State Observer and Its Application in UAV Fault Diagnosis. Algorithms 2021, 14, 119. [Google Scholar] [CrossRef]
- Zuo, L.; Yao, L.; Kang, Y. UIO Based Sensor Fault Diagnosis and Compensation for Quadrotor UAV. In Proceedings of the 2020 Chinese Control And Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 4052–4057. [Google Scholar] [CrossRef]
- Saied, M.; Mahairy, T.; Francis, C.; Shraim, H.; Mazeh, H.; Rafei, M.E. Differential Flatness-Based Approach for Sensors and Actuators Fault Diagnosis of a Multirotor UAV. IFAC-PapersOnLine 2019, 52, 831–836. [Google Scholar] [CrossRef]
- López-Estrada, F.R.; Ponsart, J.C.; Theilliol, D.; Zhang, Y.; Astorga Zaragoza, C.M. LPV model-based tracking control and robust sensor fault diagnosis for a quadrotor UAV. J. Intell. Robot. Syst. 2016, 84, 163–177. [Google Scholar] [CrossRef]
- Guo, D.; Wang, Y.; Zhong, M.; Zhao, Y. Fault detection and isolation for Unmanned Aerial Vehicle sensors by using extended PMI filter. IFAC-PapersOnLine 2018, 51, 818–823. [Google Scholar] [CrossRef]
- Deghat, M.; Lampiri, E. Sensor Anomaly Detection and Recovery in the Roll Dynamics of a Delta-Wing Aircraft via Monte Carlo and Maximum Likelihood Methods. IFAC-PapersOnLine 2017, 50, 12791–12796. [Google Scholar] [CrossRef]
- Samy, I.; Postlethwaite, I.; Gu, D.; Fan, I.S. Detection of multiple sensor faults using neural networks- demonstrated on a unmanned air vehicle (UAV) model. In Proceedings of the UKACC International Conference on Control 2010, Coventry, UK, 7–10 September 2010; pp. 1–7. [Google Scholar] [CrossRef]
- Younes, Y.A.; Rabhi, A.; Noura, H.; Hajjaji, A.E. Sensor fault diagnosis and fault tolerant control using intelligent-output-estimator applied on quadrotor UAV. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 1117–1123. [Google Scholar] [CrossRef]
- Xu, C.; Jia, H.; Chen, Z. Simultaneous Robust Control and Sensor Fault Detection for a Ducted Coaxial-Rotor UAV. IEEE Access 2019, 7, 167739–167753. [Google Scholar] [CrossRef]
- D’Amato, E.; Mattei, M.; Notaro, I.; Scordamaglia, V. UAV Sensor FDI in Duplex Attitude Estimation Architectures Using a Set-Based Approach. IEEE Trans. Instrum. Meas. 2018, 67, 2465–2475. [Google Scholar] [CrossRef]
- Avram, R.C.; Zhang, X.; Campbell, J.; Muse, J. IMU Sensor Fault Diagnosis and Estimation for Quadrotor UAVs. IFAC-PapersOnLine 2015, 48, 380–385. [Google Scholar] [CrossRef]
- Simlinger, B.; Ducard, G. Vision-based Gyroscope Fault Detection for UAVs. In Proceedings of the 2019 IEEE Sensors Applications Symposium (SAS), Sophia Antipolis, France, 11–13 March 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Sun, H.; Yan, J.; Qu, Y.; Ren, J. Sensor fault-tolerant observer applied in UAV anti-skid braking control under control input constraint. J. Syst. Eng. Electron. 2017, 28, 126–136. [Google Scholar] [CrossRef]
- Tan, J.; Chen, X.; Cao, D. An Airborne Sensor Fault Diagnosis Method Based on Analytic Model Parameter Identification. In Proceedings of the 2019 5th International Conference on Control Science and Systems Engineering (ICCSSE), Shanghai, China, 14–16 August 2019; pp. 25–29. [Google Scholar] [CrossRef]
- Mouhssine, N.; Kabbaj, M.N.; Benbrahim, M.; Bekkali, C.E. Sensor fault detection of quadrotor using nonlinear parity space relations. In Proceedings of the 2017 International Conference on Electrical and Information Technologies (ICEIT), Rabat, Morocco, 15–18 November 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Suarez, A.; Heredia, G.; Ollero, A. Cooperative sensor fault recovery in multi-UAV systems. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–20 May 2016; pp. 1188–1193. [Google Scholar] [CrossRef]
- D’Amato, E.; Mattei, M.; Mele, A.; Notaro, I.; Scordamaglia, V. Fault tolerant low cost IMUS for UAVs. In Proceedings of the 2017 IEEE International Workshop on Measurement and Networking (M N), Naples, Italy, 27–29 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Hansen, S.; Blanke, M. Diagnosis of Airspeed Measurement Faults for Unmanned Aerial Vehicles. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 224–239. [Google Scholar] [CrossRef] [Green Version]
- Fravolini, M.L.; Pastorelli, M.; Pagnottelli, S.; Valigi, P.; Gururajan, S.; Chao, H.; Napolitano, M.R. Model-based approaches for the airspeed estimation and fault monitoring of an Unmanned Aerial Vehicle. In Proceedings of the 2012 IEEE Workshop on Environmental Energy and Structural Monitoring Systems (EESMS), Perugia, Italy, 28 September 2012; pp. 18–23. [Google Scholar] [CrossRef]
- Vitanov, I.; Aouf, N. Fault detection and isolation in an inertial navigation system using a bank of unscented H∞ filters. In Proceedings of the 2014 UKACC International Conference on Control (CONTROL), Loughborough, UK, 9–11 July 2014; pp. 250–255. [Google Scholar] [CrossRef]
- Yoon, S.; Kim, S.; Bae, J.; Kim, Y.; Kim, E. Experimental evaluation of fault diagnosis in a skew-configured UAV sensor system. Control. Eng. Pract. 2011, 19, 158–173. [Google Scholar] [CrossRef]
- Guo, K.; Liu, L.; Shi, S.; Liu, D.; Peng, X. UAV Sensor Fault Detection Using a Classifier without Negative Samples: A Local Density Regulated Optimization Algorithm. Sensors 2019, 19, 771. [Google Scholar] [CrossRef] [Green Version]
- Fravolini, M.L.; Napolitano, M.R.; Core, G.D.; Papa, U. Experimental interval models for the robust Fault Detection of Aircraft Air Data Sensors. Control. Eng. Pract. 2018, 78, 196–212. [Google Scholar] [CrossRef]
- Crispoltoni, M.; Fravolini, M.L.; Balzano, F.; D’Urso, S.; Napolitano, M.R. Interval Fuzzy Model for Robust Aircraft IMU Sensors Fault Detection. Sensors 2018, 18, 2488. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sun, R.; Cheng, Q.; Wang, G.; Ochieng, W.Y. A Novel Online Data-Driven Algorithm for Detecting UAV Navigation Sensor Faults. Sensors 2017, 17, 2243. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Zhang, C.; Zhang, Q.; Hu, X. UAV fault detection based on GA-BP neural network. In Proceedings of the 2017 32nd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Hefei, China, 19–21 May 2017; pp. 806–811. [Google Scholar] [CrossRef]
- Chen, Y.; Hu, X.; Zhang, Q.; Zhang, C. Research on multi-classification method of UAV sensor fault based on wavelet entropy and AFWA-BP neural network. In Proceedings of the 2017 32nd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Hefei, China, 19–21 May 2017; pp. 837–842. [Google Scholar] [CrossRef]
- Olyaei, M.H.; Jalali, H.; Noori, A.; Eghbal, N. Fault Detection and Identification on UAV System with CITFA Algorithm Based on Deep Learning. In Proceedings of the Iranian Conference on Electrical Engineering (ICEE), Mashhad, Iran, 8–10 May 2018; pp. 988–993. [Google Scholar] [CrossRef]
- Gao, Y.H.; Zhao, D.; Li, Y.B. Small UAV sensor fault detection and signal reconstruction. In Proceedings of the 2013 International Conference on Mechatronic Sciences, Electric Engineering and Computer (MEC), Shengyang, China, 20–22 December 2013; pp. 3055–3058. [Google Scholar] [CrossRef]
- Lieret, M.; Fertsch, J.; Franke, J. Fault detection for autonomous multirotors using a redundant flight control architecture. In Proceedings of the 2020 IEEE 16th International Conference on Automation Science and Engineering (CASE), Hong Kong, China, 20–21 August 2020; pp. 29–34. [Google Scholar] [CrossRef]
- Ren, X.L. Observer Design for Actuator Failure of a Quadrotor. IEEE Access 2020, 8, 152742–152750. [Google Scholar] [CrossRef]
- Zhang, H.; Gao, Q.; Pan, F. An Online Fault Diagnosis Method For Actuators Of Quadrotor UAV With Novel Configuration Based On IMM. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 618–623. [Google Scholar] [CrossRef]
- Guzmán-Rabasa, J.A.; López-Estrada, F.R.; González-Contreras, B.M.; Valencia-Palomo, G.; Chadli, M.; Pérez-Patricio, M. Actuator fault detection and isolation on a quadrotor unmanned aerial vehicle modeled as a linear parameter-varying system. Meas. Control 2019, 52, 1228–1239. [Google Scholar] [CrossRef] [Green Version]
- Lijia, C.; Yu, T.; Guo, Z. Adaptive observer-based fault detection and active tolerant control for unmanned aerial vehicles attitude system. IFAC-PapersOnLine 2019, 52, 47–52. [Google Scholar] [CrossRef]
- Yin, L.; Liu, J.; Yang, P. Interval Observer-based Fault Detection for UAVs Formation with Actuator Faults. In Proceedings of the 2019 CAA Symposium on Fault Detection, Supervision and Safety for Technical Processes (SAFEPROCESS), Xiamen, China, 5–7 July 2019; pp. 901–905. [Google Scholar] [CrossRef]
- Li, D.; Yang, P.; Liu, Z.; Liu, J. Fault Diagnosis for Distributed UAVs Formation Based on Unknown Input Observer. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 4996–5001. [Google Scholar] [CrossRef]
- Ma, H.; Liu, Y.; Li, T.; Yang, G. Nonlinear High-Gain Observer-Based Diagnosis and Compensation for Actuator and Sensor Faults in a Quadrotor Unmanned Aerial Vehicle. IEEE Trans. Ind. Inform. 2019, 15, 550–562. [Google Scholar] [CrossRef]
- Zhong, Y.; Zhang, Y.; Zhang, W.; Zhan, H. Actuator and Sensor Fault Detection and Diagnosis for Unmanned Quadrotor Helicopters. IFAC-PapersOnLine 2018, 51, 998–1003. [Google Scholar] [CrossRef]
- Zhong, Y.; Zhang, Y.; Zhang, W.; Zuo, J.; Zhan, H. Robust Actuator Fault Detection and Diagnosis for a Quadrotor UAV With External Disturbances. IEEE Access 2018, 6, 48169–48180. [Google Scholar] [CrossRef]
- Hajiyev, C. An Innovation Approach Based Model Change Detection Applied to UAV Actuator/Surface FDI. IFAC-PapersOnLine 2018, 51, 77–82. [Google Scholar] [CrossRef]
- Hasan, A.; Johansen, T.A. Model-Based Actuator Fault Diagnosis in Multirotor UAVs. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 1017–1024. [Google Scholar] [CrossRef]
- Bauer, P.; Venkataraman, R.; Vanek, B.; Seiler, P.J.; Bokor, J. Fault Detection and Basic In-Flight Reconfiguration of a Small UAV Equipped with Elevons. IFAC-PapersOnLine 2018, 51, 600–607. [Google Scholar] [CrossRef]
- Su, J.; He, J.; Cheng, P.; Chen, J. Actuator fault diagnosis of a Hexacopter: A nonlinear analytical redundancy approach. In Proceedings of the 2017 25th Mediterranean Conference on Control and Automation (MED), Valletta, Malta, 3–6 July 2017; pp. 413–418. [Google Scholar] [CrossRef]
- Avram, R.C.; Zhang, X.; Muse, J. Quadrotor Actuator Fault Diagnosis and Accommodation Using Nonlinear Adaptive Estimators. IEEE Trans. Control Syst. Technol. 2017, 25, 2219–2226. [Google Scholar] [CrossRef]
- Ortiz-Torres, G.; López-Estrada, F.; Reyes-Reyes, J.; García-Beltrán, C.; Theilliol, D. An Actuator Fault Detection and Isolation method design for Planar Vertical Take-off and Landing Unmanned Aerial Vehicle modelled as a qLPV system. IFAC-PapersOnLine 2016, 49, 272–277. [Google Scholar] [CrossRef]
- Cao, D.; Fu, J.; Li, Y. Fault diagnosis of actuator of Flight Control System based on analytic model. In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 12–14 August 2016; pp. 397–400. [Google Scholar] [CrossRef]
- Rotondo, D.; Cristofaro, A.; Johansen, T.A.; Nejjari, F.; Puig, V. Detection of icing and actuators faults in the longitudinal dynamics of small UAVs using an LPV proportional integral unknown input observer. In Proceedings of the 2016 3rd Conference on Control and Fault-Tolerant Systems (SysTol), Barcelona, Spain, 7–9 September 2016; pp. 690–697. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Ma, Y.; Xu, B.; Xiang, C.; Yang, X. Fault detection and isolation based on UKFs for a novel ducted fan UAV. In Proceedings of the 2016 IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016; pp. 212–218. [Google Scholar] [CrossRef]
- Saied, M.; Shraim, H.; Francis, C.; Fantoni, I.; Lussier, B. Actuator fault diagnosis in an octorotor UAV using sliding modes technique: Theory and experimentation. In Proceedings of the 2015 European Control Conference (ECC), Linz, Austria, 15–17 July 2015; pp. 1639–1644. [Google Scholar] [CrossRef]
- Kugler, M.E.; Holzapfel, F. Enhancing the auto flight system of the SAGITTA Demonstrator UAV by fault detection and diagnosis. In Proceedings of the 2015 IEEE International Conference on Aerospace Electronics and Remote Sensing Technology (ICARES), Bali, Indonesia, 3–5 December 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Yang, X.; Mejias, L.; Warren, M.; Gonzalez, F.; Upcroft, B. Recursive Actuator Fault Detection and Diagnosis for Emergency Landing of UASs. IFAC Proc. Vol. 2014, 47, 2495–2502. [Google Scholar] [CrossRef] [Green Version]
- Zhaohui, C.; Noura, H.; Susilo, T.B.; Younes, Y.A. Engineering implementation on fault diagnosis for quadrotors based on nonlinear observer. In Proceedings of the 2013 25th Chinese Control and Decision Conference (CCDC), Guiyang, China, 25–27 May 2013; pp. 2971–2975. [Google Scholar] [CrossRef]
- Cen, Z.; Noura, H. An Adaptive Thau Observer for estimating the time-varying LOE fault of quadrotor actuators. In Proceedings of the 2013 Conference on Control and Fault-Tolerant Systems (SysTol), Nice, France, 9–11 October 2013; pp. 468–473. [Google Scholar] [CrossRef]
- Ducard, G. The SMAC Fault Detection and Isolation Scheme: Discussions, improvements, and application to a UAV. In Proceedings of the 2013 Conference on Control and Fault-Tolerant Systems (SysTol), Nice, France, 9–11 October 2013; pp. 480–485. [Google Scholar] [CrossRef]
- Tousi, M.M.; Khorasani, K. Robust observer-based fault diagnosis for an unmanned aerial vehicle. In Proceedings of the 2011 IEEE International Systems Conference, Montreal, QC, Canada, 4–7 April 2011; pp. 428–434. [Google Scholar] [CrossRef]
- Ma, L.; Zhang, Y. DUKF-based GTM UAV fault detection and diagnosis with nonlinear and LPV models. In Proceedings of the 2010 IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications, Qingdao, China, 15–17 July 2010; pp. 375–380. [Google Scholar] [CrossRef]
- Fu, J.; Sun, C.; Yu, Z.; Liu, L. A hybrid CNN-LSTM model based actuator fault diagnosis for six-rotor UAVs. In Proceedings of the 2019 Chinese Control And Decision Conference (CCDC), Hefei, China, 21–23 May 2019; pp. 410–414. [Google Scholar] [CrossRef]
- Younes, Y.A.; Noura, H.; Rabhi, A.; Hajjaji, A.E. Actuator Fault-Diagnosis and Fault-Tolerant-Control using intelligent-Output-Estimator Applied on Quadrotor UAV. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 413–420. [Google Scholar] [CrossRef]
- Hansen, S.; Blanke, M.; Adrian, J. A Framework for Diagnosis of Critical Faults in Unmanned Aerial Vehicles. IFAC Proc. Vol. 2014, 47, 10555–10561. [Google Scholar] [CrossRef] [Green Version]
- Jun, W.; Xiong-Dong, Y.; Yu-Yang, T. Fault-Tolerant Control Design of Quadrotor UAV Based on CPSO. In Proceedings of the 2018 IEEE 4th International Conference on Control Science and Systems Engineering (ICCSSE), Wuhan, China, 21–23 August 2018; pp. 279–283. [Google Scholar] [CrossRef]
- Wang, P.; Jia, G.; Chen, Q.; Wang, Y.; Wang, J. A Fault Tolerant Control Approach for the Solar-Powered HALE UAV. In Proceedings of the 2019 International Conference on Control, Automation and Diagnosis (ICCAD), Grenoble, France, 2–4 July 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Padilla, M.L.F.; Lao, S.J.C.; Baldovino, R.G.; Bandala, A.A.; Dadios, E.B. Fuzzy-based fault-tolerant control of Micro Aerial Vehicles (MAV)—A preliminary study. In Proceedings of the 2017 IEEE 9th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment and Management (HNICEM), Manila, Philippines, 1–3 December 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Mallavalli, S.; Fekih, A. An SMC-based fault tolerant control design for a class of underactuated unmanned aerial vehicles. In Proceedings of the 2018 4th International Conference on Control, Automation and Robotics (ICCAR), Auckland, New Zealand, 20–23 April 2018; pp. 152–155. [Google Scholar] [CrossRef]
- Mallavalli, S.; Fekih, A. Adaptive Fault Tolerant Control Design for Actuator Fault Mitigation in Quadrotor UAVs. In Proceedings of the 2018 IEEE Conference on Control Technology and Applications (CCTA), Copenhagen, Denmark, 21–24 August 2018; pp. 193–198. [Google Scholar] [CrossRef]
- Mallavalli, S.; Fekih, A. A Fault Tolerant Control Design for Actuator Fault Mitigation in Quadrotor UAVs. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 5111–5116. [Google Scholar] [CrossRef]
- Hao, W.; Xian, B. Nonlinear fault tolerant control for a tri-rotor UAV against rear servo’s stuck fault. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 7109–7114. [Google Scholar] [CrossRef]
- Gong, W.; Zhang, J.; Li, B.; Yang, Y. Integral-type Sliding Mode based Fault-tolerant Attitude Stabilization of A Quad-rotor UAV. In Proceedings of the 2018 International Symposium in Sensing and Instrumentation in IoT Era (ISSI), Shanghai, China, 6–7 September 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Xian, B.; Hao, W. Nonlinear Robust Fault-Tolerant Control of the Tilt Trirotor UAV Under Rear Servo’s Stuck Fault: Theory and Experiments. IEEE Trans. Ind. Inform. 2019, 15, 2158–2166. [Google Scholar] [CrossRef]
- Qu, Q.; Gao, S.; Huang, D.; Mei, J.; Zhai, B. Fault tolerant control for UAV with finite-time convergence. In Proceedings of the 26th Chinese Control and Decision Conference (2014 CCDC), Changsha, China, 31 May–2 June 2014; pp. 2857–2862. [Google Scholar] [CrossRef]
- Mallavalli, S.; Fekih, A. Sliding mode-based fault tolerant control designs for quadrotor UAVs-A comparative study. In Proceedings of the 2017 13th IEEE International Conference on Control Automation (ICCA), Ohrid, Macedonia, 3–6 July 2017; pp. 154–159. [Google Scholar] [CrossRef]
- Khattab, A.; Alwi, H.; Edwards, C. Fault Tolerant Control of a Spherical UAV. In Proceedings of the 2019 4th Conference on Control and Fault Tolerant Systems (SysTol), Casablanca, Morocco, 18–20 September 2019; pp. 92–97. [Google Scholar] [CrossRef]
- Sørensen, M.E.N.; Breivik, M. UAV fault-tolerant control by combined L1 adaptive backstepping and fault-dependent control allocation. In Proceedings of the 2015 IEEE Conference on Control Applications (CCA), Sydney, Australia, 21–23 September 2015; pp. 1880–1886. [Google Scholar] [CrossRef] [Green Version]
- Yu, Z.; Zhang, Y.; Jiang, B.; Su, C.Y.; Fu, J.; Jin, Y.; Chai, T. Fractional-Order Adaptive Fault-Tolerant Synchronization Tracking Control of Networked Fixed-Wing UAVs Against Actuator-Sensor Faults via Intelligent Learning Mechanism. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–15. [Google Scholar] [CrossRef]
- Yu, Z.; Badihi, H.; Zhang, Y.; Ma, Y.; Jiang, B.; Su, C.Y. Fractional-Order Sliding-Mode Fault-Tolerant Neural Adaptive Control of Fixed-Wing UAV With Prescribed Tracking Performance. In Proceedings of the 2020 2nd International Conference on Industrial Artificial Intelligence (IAI), Shenyang, China, 23–25 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Tan, L.; Shen, Z.; Yu, S. Adaptive fault-tolerant flight control for a quadrotor UAV with slung payload and varying COG. In Proceedings of the 2019 3rd International Symposium on Autonomous Systems (ISAS), Shanghai, China, 29–31 May 2019; pp. 227–231. [Google Scholar] [CrossRef]
- Zou, Y.; Xia, K. Robust Fault-Tolerant Control for Underactuated Takeoff and Landing UAVs. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 3545–3555. [Google Scholar] [CrossRef]
- Qian, M.; Zhai, L.; Zhong, G.; Gao, Z. Adaptive Backstepping Fault Tolerant Controller Design for UAV with Multiple Actuator Faults. In Proceedings of the 2019 CAA Symposium on Fault Detection, Supervision and Safety for Technical Processes (SAFEPROCESS), Xiamen, China, 5–7 July 2019; pp. 682–688. [Google Scholar] [CrossRef]
- Song, Y.; He, L.; Zhang, D.; Qian, J.; Fu, J. Neuroadaptive Fault-Tolerant Control of Quadrotor UAVs: A More Affordable Solution. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 1975–1983. [Google Scholar] [CrossRef]
- Avram, R.C.; Zhang, X.; Muse, J. Nonlinear Adaptive Fault-Tolerant Quadrotor Altitude and Attitude Tracking With Multiple Actuator Faults. IEEE Trans. Control. Syst. Technol. 2018, 26, 701–707. [Google Scholar] [CrossRef]
- Xue, Y.; Zhen, Z.; Yang, L.; Wen, L. Adaptive fault-tolerant control for carrier-based UAV with actuator failures. Aerosp. Sci. Technol. 2020, 107, 106227. [Google Scholar] [CrossRef]
- Vural, S.Y.; Dasdemir, J.; Hajiyev, C. Passive Fault Tolerant Lateral Controller Design For an UAV. IFAC-PapersOnLine 2018, 51, 446–451. [Google Scholar] [CrossRef]
- Xing, X.; Ma, Z.; Chen, X.; Huang, L. Fault-tolerant flight control of quad-rotor UAV based on sliding mode theory. In Proceedings of the 2018 Chinese Control And Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 298–303. [Google Scholar] [CrossRef]
- Merheb, A.; Noura, H.; Bateman, F.; Al-Jaroodi, J. Fault severity based Integrated Fault Tolerant Controller for quadrotor UAVs. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 660–668. [Google Scholar] [CrossRef]
- Zhaohui, C.; Noura, H. A composite Fault Tolerant Control based on fault estimation for quadrotor UAVs. In Proceedings of the 2013 IEEE 8th Conference on Industrial Electronics and Applications (ICIEA), Melbourne, Australia, 19–21 June 2013; pp. 236–241. [Google Scholar] [CrossRef]
- Xulin, L.; Yuying, G. Fault tolerant control of a quadrotor UAV using control allocation. In Proceedings of the 2018 Chinese Control And Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 1818–1824. [Google Scholar] [CrossRef]
- Sadeghzadeh, I.; Mehta, A.; Chamseddine, A.; Zhang, Y. Active Fault Tolerant Control of a quadrotor UAV based on gain scheduled PID control. In Proceedings of the 2012 25th IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), Montreal, QC, USA, 29 April–2 May 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Jun, W.; Tian, Y. Fault Tolerant Control of Quadrotor UAV Based on Support Vector Machine. In Proceedings of the 2019 5th International Conference on Control Science and Systems Engineering (ICCSSE), Shanghai, China, 14–16 August 2019; pp. 10–13. [Google Scholar] [CrossRef]
- Sadeghzadeh, I.; Zhang, Y. Actuator fault-tolerant control based on Gain-Scheduled PID with application to fixed-wing Unmanned Aerial Vehicle. In Proceedings of the 2013 Conference on Control and Fault-Tolerant Systems (SysTol), Nice, France, 9–11 October 2013; pp. 342–346. [Google Scholar] [CrossRef]
- Zhong, Y.; Zhang, Y.; Zhang, W. Active Fault-Tolerant Tracking Control of a Quadrotor UAV. In Proceedings of the 2018 International Conference on Sensing, Diagnostics, Prognostics, and Control (SDPC), Xi’an, China, 15–17 August 2018; pp. 497–502. [Google Scholar] [CrossRef]
- Cheng, P.; Gao, Z.; Qian, M.; Lin, J. Active fault tolerant control design for UAV using nonsingular fast terminal sliding mode approach. In Proceedings of the 2018 Chinese Control And Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 292–297. [Google Scholar] [CrossRef]
- Hasanshahi, M.; Ahmadi, A.; Amjadifard, R. Robust Fault Tolerant Position Tracking Control for a Quadrotor UAV in Presence of Actuator Faults. In Proceedings of the 2019 6th International Conference on Control, Instrumentation and Automation (ICCIA), Kurdistan, Iran, 30–31 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Hajiyev, C. Reconfigurable fault-tolerant UAV flight control against actuator faults. In Proceedings of the 2016 Australian Control Conference (AuCC), Newcastle, Australia, 3–4 November 2016; pp. 323–328. [Google Scholar] [CrossRef]
- Rudin, K.; Ducard, G.J.J.; Siegwart, R.Y. Active Fault-Tolerant Control With Imperfect Fault Detection Information: Applications to UAVs. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 2792–2805. [Google Scholar] [CrossRef]
- E-Aimen, U.; Liaquat, M. Fault tolerant tracking control of Unmanned Aerial Vehicle using Linear Quadratic Gaussian with integral reconfiguration control. In Proceedings of the 2017 International Automatic Control Conference (CACS), Pingtung, Taiwan, 12–15 November 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Vey, D.; Lunze, J. Experimental evaluation of an active fault-tolerant control scheme for multirotor UAVs. In Proceedings of the 2016 3rd Conference on Control and Fault-Tolerant Systems (SysTol), Barcelona, Spain, 7–9 September 2016; pp. 125–132. [Google Scholar] [CrossRef]
- Abbaspour, A.; Yen, K.K.; Forouzannezhad, P.; Sargolzaei, A. A Neural Adaptive Approach for Active Fault-Tolerant Control Design in UAV. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 3401–3411. [Google Scholar] [CrossRef]
- Nguyen, T.; Saussie, D.; Saydy, L. Design and Experimental Validation of Robust Self-Scheduled Fault-Tolerant Control Laws for a Multicopter UAV. IEEE/ASME Trans. Mechatron. 2020. [Google Scholar] [CrossRef]
- Nguyen, D.; Saussié, D.; Saydy, L. Fault-Tolerant Control of a Hexacopter UAV based on Self-Scheduled Control Allocation. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 385–393. [Google Scholar] [CrossRef]
- Liu, F.; Hou, X.; Wang, R.; Yu, Y. Actuator Fault Tolerant Control based on Neuroadaptive SMC for Quadrotor UAVs. In Proceedings of the 2020 35th Youth Academic Annual Conference of Chinese Association of Automation (YAC), Zhanjiang, China, 16–18 October 2020; pp. 144–149. [Google Scholar] [CrossRef]
- Hou, Z.; Lu, P.; Tu, Z. Nonsingular terminal sliding mode control for a quadrotor UAV with a total rotor failure. Aerosp. Sci. Technol. 2020, 98, 105716. [Google Scholar] [CrossRef]
- Guiatni, M.; Saidani, H.; Bouzid, Y. Fault Tolerant Control Design for Actuator Loss of Effectiveness in Quadrotor Uavs. In Proceedings of the 2019 International Russian Automation Conference (RusAutoCon), Sochi, Russia, 6–12 September 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Shi, X.; Cheng, Y.; Yin, C.; Shi, H.; Huang, X. Actuator fault tolerant controlling using adaptive radical basis function neural network SMC for quadrotor UAV. In Proceedings of the 2019 Chinese Control And Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 5409–5414. [Google Scholar] [CrossRef]
- Chung, W.; Son, H. Fault-Tolerant Control of Multirotor UAVs by Control Variable Elimination. IEEE/ASME Trans. Mechatronics 2020, 25, 2513–2522. [Google Scholar] [CrossRef]
- Ge, Z.; Liu, J.; Yang, P. Integral Sliding Mode Active Fault-Tolerant Control for Unmanned Aerial Vehicles. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 2216–2220. [Google Scholar] [CrossRef]
- Ergöçmen, B.; Yavrucuk, I. Active Hybrid Fault Tolerant Flight Control of an UAV under Control Surface Damage. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; pp. 4169–4174. [Google Scholar] [CrossRef]
- Yu, B.; Zhang, Y.; Qu, Y. MPC-based FTC with FDD against actuator faults of UAVs. In Proceedings of the 2015 15th International Conference on Control, Automation and Systems (ICCAS), Busan, Korea, 13–16 October 2015; pp. 225–230. [Google Scholar] [CrossRef]
- Saied, M.; Lussier, B.; Fantoni, I.; Francis, C.; Shraim, H. Fault tolerant control for multiple successive failures in an octorotor: Architecture and experiments. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 40–45. [Google Scholar] [CrossRef] [Green Version]
- Bateman, F.; Noura, H.; Ouladsine, M. Fault Diagnosis and Fault-Tolerant Control Strategy for the Aerosonde UAV. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2119–2137. [Google Scholar] [CrossRef]
- Sharifi, F.; Mirzaei, M.; Gordon, B.W.; Zhang, Y. Fault tolerant control of a quadrotor UAV using sliding mode control. In Proceedings of the 2010 Conference on Control and Fault-Tolerant Systems (SysTol), Nice, France, 6–8 October 2010; pp. 239–244. [Google Scholar] [CrossRef]
- Nguyen, D.T.; Saussié, D.; Saydy, L. Universal Adaptive Fault-Tolerant Control of a Multicopter UAV This work was supported by NSERC under grant numbers RGPIN-2014-03942 and RGPIN-2012-122106. IFAC-PapersOnLine 2020, 53, 9340–9347. [Google Scholar] [CrossRef]
- Cheng, P.; Cai, C.; Zou, Y. Finite Time Fault Tolerant Control Design for UAV Attitude Control Systems with Actuator Fault and Actuator Saturation This work is jointly supported by the National Natural Science Foundation of China under Grant No.61573186 and No.61773214. IFAC-PapersOnLine 2019, 52, 53–58. [Google Scholar] [CrossRef]
- Boche, A.; Farges, J.L.; De Plinval, H. Reconfiguration control method for multiple actuator faults on UAV. IFAC-PapersOnLine 2017, 50, 12691–12697. [Google Scholar] [CrossRef]
- Wang, B.; Shen, Y.; Zhang, Y. Active fault-tolerant control for a quadrotor helicopter against actuator faults and model uncertainties. Aerosp. Sci. Technol. 2020, 99, 105745. [Google Scholar] [CrossRef]
- Baldini, A.; Felicetti, R.; Freddi, A.; Longhi, S.; Monteriù, A. Actuator Fault Tolerant Control of Variable Pitch Quadrotor Vehicles. IFAC-PapersOnLine 2020, 53, 4095–4102. [Google Scholar] [CrossRef]
- Pedro, J.O.; Tshabalala, T.B. PI-Based Fault Tolerant Control For Fixed-Wing UAVs Using Control Allocation. IFAC-PapersOnLine 2017, 50, 181–186. [Google Scholar] [CrossRef]
- Liang, S.; Zhang, S.; Huang, Y.; Zheng, X.; Cheng, J.; Wu, S. Data-driven fault diagnosis of FW-UAVs with consideration of multiple operation conditions. ISA Trans. 2021. [Google Scholar] [CrossRef]
- Chen, M.; Pan, Z.; Chi, C.; Ma, J.; Hu, F.; Wu, J. Research on UAV Wing Structure Health Monitoring Technology Based on Finite Element Simulation Analysis. In Proceedings of the 2020 11th International Conference on Prognostics and System Health Management (PHM-2020 Jinan), Jinan, China, 23–25 October 2020; pp. 86–90. [Google Scholar] [CrossRef]
- Pan, D.; Nie, L.; Kang, W.; Song, Z. UAV Anomaly Detection Using Active Learning and Improved S3VM Model. In Proceedings of the 2020 International Conference on Sensing, Measurement Data Analytics in the era of Artificial Intelligence (ICSMD), Xi’an, China, 15–17 October 2020; pp. 253–258. [Google Scholar] [CrossRef]
- Bronz, M.; Baskaya, E.; Delahaye, D.; Puechmore, S. Real-time Fault Detection on Small Fixed-Wing UAVs using Machine Learning. In Proceedings of the 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020; pp. 1–10. [Google Scholar] [CrossRef]
- Varigonda, V.k.; Agrawal, B.; Annamalai, V.K. IoT based Automatic Fault Identification and Alerting System for Unmanned Aerial Vehicles. In Proceedings of the 2020 Fourth International Conference on Inventive Systems and Control (ICISC), Coimbatore, India, 6–7 January 2020; pp. 20–24. [Google Scholar] [CrossRef]
- Titouna, C.; Naït-Abdesselam, F.; Moungla, H. An Online Anomaly Detection Approach For Unmanned Aerial Vehicles. In Proceedings of the 2020 International Wireless Communications and Mobile Computing (IWCMC), Limassol, Cyprus, 15–19 June 2020; pp. 469–474. [Google Scholar] [CrossRef]
- Keipour, A.; Mousaei, M.; Scherer, S. Automatic Real-time Anomaly Detection for Autonomous Aerial Vehicles. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 5679–5685. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Liu, D.; Peng, X.; Wang, Z. Data-Driven Anomaly Detection of UAV based on Multimodal Regression Model. In Proceedings of the 2019 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Ottawa, ON, Canada, 16–19 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, B.; Wang, Z.; Liu, L.; Liu, D.; Peng, X. Data-Driven Anomaly Detection for UAV Sensor Data Based on Deep Learning Prediction Model. In Proceedings of the 2019 Prognostics and System Health Management Conference (PHM-Paris), Paris, France, 2–5 May 2019; pp. 286–290. [Google Scholar] [CrossRef]
- Ahn, H.; Choi, H.L.; Kang, M.; Moon, S. Learning-Based Anomaly Detection and Monitoring for Swarm Drone Flights. Appl. Sci. 2019, 9, 5477. [Google Scholar] [CrossRef] [Green Version]
- Pourpanah, F.; Zhang, B.; Ma, R.; Hao, Q. Anomaly Detection and Condition Monitoring of UAV Motors and Propellers. In Proceedings of the 2018 IEEE SENSORS, New Delhi, India, 28–31 October 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Lu, H.; Li, Y.; Mu, S.; Wang, D.; Kim, H.; Serikawa, S. Motor Anomaly Detection for Unmanned Aerial Vehicles Using Reinforcement Learning. IEEE Internet Things J. 2018, 5, 2315–2322. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, B.; Liu, W.; Liu, D. On-line and non-invasive anomaly detection system for unmanned aerial vehicle. In Proceedings of the 2017 Prognostics and System Health Management Conference, Harbin, China, 9–12 July 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Pan, D. Hybrid data-driven anomaly detection method to improve UAV operating reliability. In Proceedings of the 2017 Prognostics and System Health Management Conference, Harbin, China, 9–12 July 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Freeman, P.; Pandita, R.; Srivastava, N.; Balas, G.J. Model-Based and Data-Driven Fault Detection Performance for a Small UAV. IEEE/ASME Trans. Mechatron. 2013, 18, 1300–1309. [Google Scholar] [CrossRef]
- Afridi, M.J.; Awan, A.J.; Iqbal, J. AWG-Detector: A machine learning tool for the accurate detection of Anomalies due to Wind Gusts (AWG) in the adaptive Altitude control unit of an Aerosonde unmanned Aerial Vehicle. In Proceedings of the 2010 10th International Conference on Intelligent Systems Design and Applications, Cairo, Egypt, 29 November–1 December 2010; pp. 1125–1130. [Google Scholar] [CrossRef]
- Lin, R.; Khalastchi, E.; Kaminka, G.A. Detecting anomalies in unmanned vehicles using the Mahalanobis distance. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, Alaska, 3–8 May 2010; pp. 3038–3044. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Databases | IEEE Xplore |
| ScienceDirect | |
| Web of Science | |
| Semantic Scholar | |
| ENGnetBASE | |
| Google Scholar | |
| Keywords | Fault Diagnosis and UAV |
| Survey and Fault Diagnosis and UAV | |
| Survey and UAV | |
| Sensors and Fault Diagnosis and UAV | |
| Actuators and Fault Diagnosis and UAV | |
| Fault-Tolerant Control and UAV | |
| Anomaly Detection and UAV | |
| Search Date | January–August 2021 |
| Reference | Brief Summary | Objective |
|---|---|---|
| Shraim et al. [3] | A Survey on Quadrotors | Sensors and Actuators Fault Diagnosis and Fault-Tolerant Control |
| Gao et al. [10] | UAV Sensor Fault Diagnosis | Sensor Fault Diagnosis and Tolerant Control |
| Qi et al. [11] | Fault Diagnosis and Fault-Tolerant Control Methods | Single-Rotor Aerial Vehicles |
| Sadeghzadeh et al. [12] | A Review on Fault-Tolerant Control | Unmanned Aerial Vehicles (UAVs) |
| Reference | Sensor Type | FDI Method | UAV Type |
|---|---|---|---|
| Hardware Redundancy | |||
| Drak et al. [13] | Altitude Sensor | Hardware Redundancy | Quadrotor |
| Shi et al. [14] | Gyroscope | Hardware Redundancy | Quadrotor |
| Analytical Redundancy | |||
| Model-Based | |||
| Miao et al. [15] | Inertial Measurement Units (IMU) | Model-Based/Adaptive Nonlinear Proportional Integral (PI) Observer | Fix-Wing |
| Zuo et al. [16] | Inertial Measurement Units (IMU) | Model-Based/Unknown Input Observer (UIO) | Quadrotor |
| Saied et al. [17] | Position-Orientation and Motors | Model-Based | Hexarotor |
| López-Estrada et al. [18] | Position-Orientation | Model-Based/Bank of Observers | Quadrotor |
| Guo et al. [19] | Pitot Tube and Accelerometers | Model-Based/Kalman-Based | Quadrotor |
| Deghat et al. [20] | Roll | Model-Based/Particle Filter, Maximum Likelihood | Delta-Wing |
| Samy et al. [21] | Pitch Gyro, Angle of Attack, Normal Accelerometer | Model-Based/NN | Fix-Wing |
| Younes et al. [22] | Position | Model-Based | Quadrotor |
| Xu et al. [23] | X-axis and Y-axis Angular Velocity | Model-Based | Single-Rotor |
| D’Amato et al. [24] | Inertial Measurement Units (IMU) | Model-Based | Multi-Rotor, Tricopter |
| Avram et al. [25] | Inertial Measurement Units (IMU) | Model-Based/Sliding Mode Observer | Quadrotor |
| Simlinger et al. [26] | Gyroscope | Model-Based/KF | Fix-Wind |
| Sun et al. [27] | Wheel Velocity of ABS | Model-Based/Sliding Mode Observer | Fix-Wing |
| Tan et al. [28] | Airborne Sensor (IMU, GPS, Attitude, Angle of Attack) | Model-Based/Kalman-Bussy | undefined UAV |
| Mouhssine et al. [29] | Inertial Measurement Units (IMU) | Model-Based | Quadrotor |
| Suarez et al. [30] | Position | Model-Based/EKF | Quadrotor |
| D’Amato et al. [31] | Inertial Measurement Units (IMU) | Model-Based | Quadrotor |
| Hansen et al. [32] | Airspeed | Model-Based | Fix-Wing |
| Fravolini et al. [33] | Airspeed | Model-Based | Fix-Wing |
| Vitanov et al. [34] | Inertial Navigation System (INS) | Model-Based/Unscented Filter (UHF) | Quadrotor |
| Yoon et al. [35] | Inertial Measurement Units (IMU) | Model-Based/Parity Space and Signal-Based | Fix-Wing |
| Knowledge-Based | |||
| Guo et al. [36] | Gyroscope | Knowledge-Based | Quadrotor |
| Fravolini et al. [37] | Airspeed, Angle of Attack, Sideslip angle | Knowledge-Based | Fix-Wing, Semi-Autonomous |
| Crispoltoni et al. [38] | Inertial Measurement Units (IMU) | Knowledge-Based/Fuzzy Logic | Fix-Wing, Semi-Autonomous |
| Sun et al. [39] | Navigation GPS/IMU | Knowledge-Based/Adaptive Neuron Fuzzy Inference System (ANFIS) | Quadrotor |
| Chen et al. [40,41] | Gyroscope | Knowledge-Based | undefined UAV |
| Olyaei et al. [42] | Angle of Attack, Pitch Angle, Pitch Angular Rate, Height | Knowledge-Based/Deep Learning | Fix-Wing |
| Gao et al. [43] | Angular Rate | Knowledge-Based/Least Squares Support Vector Machine (LS-SVM), Principal Component Analysis (PCA) | Fix-Wing, Aerosonde |
| Reference | Actuator Type | FDI Method | UAV Type |
|---|---|---|---|
| Hardware Redundancy | |||
| Lieret et al. [44] | Rotor | Hardware Redundancy | Multirotor |
| Analytical Redundancy | |||
| Model-Based | |||
| Xiao-Lu Ren [45] | Rotor | Model-Based/H∞ Observer | Quadrotor |
| Zhang et al. [46] | Rotor | Model-Based/KF | Quadrotor |
| Guzmán-Rabasa et al. [47] | Rotor | Model-Based/H∞ Observer | Quadrotor |
| Lijia et al. [48] | Altitude System (Ailerons, Elevators, Rudder) | Model-Based/Robust Adaptive Observer & Radial Basis Function Neural Network (RBFNN) | Fixed-Wing |
| Yin et al. [49] | Rotor | Model-Based/Interval Observer | VTOL |
| Li et al. [50] | Rotor | Model-Based | Fix-Wing |
| Ma et al. [51] | Biases in Position Sensors and Balance Sensors/External Inputs, Electric Regulator, Bias in Motor Torques | Model-Based/Observer-Based | Quadrotor |
| Zhong et al. [52] | Motor & Altitude Sensor | Model-Based/Interacting Multiple Model (IMM) | Quadrotor |
| Zhong et al. [53] | Propellers, Motors | Model-Based, Adaptive Augmented State KF | Quadrotor |
| Hajiyev [54] | Elevator, Ailerons, Rudder | Model-Based | Fix-Wing |
| Hasan et al. [55] | Motors | Model-Based/Nonlinear Thau Observer & Linearized KF | Multi-Rotor, Quadrotor |
| Bauer et al. [56] | Elevons | Model-Based/Multiple Model Adaptive Estimation | Fixed-Wing |
| Su et al. [57] | Rotor | Analytical Redundancy | Hexacopter |
| Avram et al. [58] | Rotor | Model-Based/Adaptive Estimators | Quadrotor |
| Ortiz-Torres et al. [59] | Propellers, Motors | Model-Based | Planar VTOL |
| Cao et al. [60] | Rotor | Model-Based | Fix-Wing |
| Rotondo et al. [61] | Rotor, Icing | Model-Based/PI-UIO | Fix-Wing |
| Liu et al. [62] | Control Vanes (CVs) | Model-Based, UKFs | Ducted Fan |
| Saied et al. [63] | Rotor | Model-Based/Sliding Mode Observer | Octorotor |
| Kugler et al. [64] | Sensors and Actuators | Model-Based | Fix-Wing |
| Yang et al. [65] | Aileron and Elevator | Model-Based/Unscented Kalman Filter (UKF) | Fix-Wing |
| Zhaohui et al. [66] | Rotor | Model-Based/Nonlinear Observer | Quadrotor |
| Cen et al. [67] | Rotor | Model-Based, Adaptive Thau Observer (ATO) | Quadrotor |
| Ducard [68] | Ailerons, Elevators, Rudder | Model-Based | Fix-Wing |
| Tousi et al. [69] | Rotor, Icing | Model-Based/Observer | Fix-Wing, Aerosonde |
| Ma et al. [70] | Elevators | Model-Based/Dual Unscented Kalman Filter (DUKF) | Fix-Wing |
| Knowledge-Based | |||
| Fu et al. [71] | Rotor | Knowledge-Based/CNN-LSTM | Six-Rotor |
| Younes et al. [72] | Rotor | Knowledge-Based/Output Estimator | Quadrotor |
| Hansen et al. [73] | Airspeed & Control Surface Actuator | Knowledge-Based | undefined UAV |
| Reference | Method Type | FTC Method | UAV Type |
|---|---|---|---|
| Passive FTC | |||
| Jun et al. [74] | Passive | PID Controller Parameter Optimization | Quadrotor |
| Wang et al. [75] | Passive | Nonlinear Control Allocation | Fixed-Wing |
| Padilla et al. [76] | Passive | Fuzzy-Based | Micro AV (Quadrotor) |
| Mallavalli et al. [77,78] | Passive | Nonsingular Fast Terminal Sliding Mode Controller (NFTSMC) & Under-actuated Sliding Mode Controller (USSMC) | Quadrotor |
| Mallavalli et al. [79] | Passive | Nonsingular Fast Terminal Sliding Mode Controller (NFTSMC) | Quadrotor |
| Hao et al. [80] | Passive | Adaptive Sliding Mode-Based Observer & Feedback Linearization-Based Controller | Tri-rotor |
| Gong et al. [81] | Passive | Sliding Mode | Quadrotor |
| Xian et al. [82] | Passive | Robust Integral of the Signum of the Error (RISE) | Tri-rotor |
| Qu et al. [83] | Passive | Dynamic Surface Control | Fix-Wing |
| Mallavalli et al. [84] | Passive | Sliding Mode | Quadrotor |
| Khattab et al. [85] | Passive | Sliding Mode & Online Control Allocation | Spherical |
| Sorensen et al. [86] | Passive | L1 Adaptive Backstepping Control & Control Allocation (CA) | Fix-Wing |
| Yu et al. [87] | Passive | Recurrent Wavelet Fuzzy Neural Network (RWFNN) | Fix-Wing |
| Yu et al. [88] | Passive | Fractional-Order Sliding-Mode Fault-Tolerant Neural Adaptive Control | Fix-Wing |
| Tan et al. [89] | Passive | Adaptive Control | Quadrotor |
| Zou et al. [90], | Passive | Hierarchical Framework | VTOL |
| Qian et al. [91] | Passive | Adaptive Backstepping Controller | Fix-Wing |
| Song et al. [92] | Passive | Indirect Neuroadaptive | Quadrotor |
| Avram et al. [93] | Passive | Adaptive Control | Quadrotor |
| Xue et al. [94] | Passive | Adaptive Control | Fix-Wing |
| Vural et al. [95] | Passive | Dynamic Inversion (DI) & Robust Integral of the Signum of Error (RISE) | Fix-Wing |
| Hybrid FTC | |||
| Xing et al. [96] | Passive & Active | Sliding Mode Theory | Quadrotor |
| Merheb et al. [97] | Passive & Active | Sliding Mode | Quadrotor |
| Zhaohui et al. [98] | Passive & Active | Adaptive Control | Quadrotor |
| Reference | Method Type | FTC Method | UAV Type |
|---|---|---|---|
| Active FTC | |||
| Xulin et al. [99] | Active | Control Allocation | Quadrotor |
| Sadeghzadeh et al. [100] | Active | Gain-Scheduled PID (GS-PID) Controller | Quadrotor |
| Jun et al. [101] | Active | PID Controller Parameter Optimization & Support Vector Machine (SVM) | Quadrotor |
| Sadeghzadeh et al. [102] | Active | Gain-Scheduled PID (GS-PID) Controller | Fix-Wing |
| Zhong et al. [103] | Active | Adaptive Control | Quadrotor |
| Cheng et al. [104] | Active | Sliding Mode | Fix-Wing |
| Hasanshahi et al. [105] | Active | Adaptive Estimation | Quadrotor |
| Hajiyev [106] | Active | Reconfigurable Active Controller | Fix-Wing |
| Rudin et al. [107] | Active | DK-iteration | Fix-Wing |
| Umm-e-Aimen et al. [108] | Active | Linear Quadratic Gaussian & Integral Reconfiguration Control | Fix-Wing, Aerosonde |
| Vey et al. [109] | Active | Bank of Observers & Virtual Actuator | Hexrotor |
| Abbaspour et al. [110] | Active | Nonlinear Dynamic Inversion Controller & Adaptive Fault Compensation Feedback Controller | Fix-Wing |
| Nguyen et al. [111] | Active | Gain-Scheduling, Structured H-Infinity Synthesis | Hexacopter |
| Nguyen et al. [112] | Active | Control Allocation, Gain-Scheduling, Structured H-Infinity Synthesis | Hexacopter |
| F. Liu et al. [113] | Active | Neuroadaptive sliding Mode Control (SMC) | Quadrotor |
| Younes et al. [22,72] | Active | intelligent Output-Estimator (iOE) | Quadrotor |
| Hou et al. [114] | Active | Nonsingular Terminal Sliding Mode Control (NTSMC) | Quadrotor |
| Guiatni et al. [115] | Active | Fuzzy Logic, Fuzzy PID Controller | Quadrotor |
| Shi et al. [116] | Active | Radical Basis Function (RBF) Neural Network & Sliding Mode Control (SMC) | Quadrotor |
| Chung et al. [117] | Active | Optimal Control | Quadrotor |
| Ge et al. [118] | Active | Integral Sliding Mode | Fix-Wing |
| Ergöçmen et al. [119] | Active | (PID)-State-Dependent Riccati Equation (SDRE) algorithm or PID-Linear Quadratic Tracking/Regulator (LQT/R) | Fix-Wing |
| Yu et al. [120] | Active | Model Predictive Control (MPC) | Quadrotor |
| Saied et al. [121] | Active | Sliding Mode | Octorotor |
| Bateman et al. [122] | Active | State Feedback Controllers | Fix-Wing, Aerosonde |
| Sharifi et al. [123] | Active | Sliding Mode | Quadrotor |
| Nguyen et al. [124] | Active | Adaptive Control | Multirotor |
| Cheng et al. [125] | Active | Non-Singular Fast Terminal Sliding Mode (NFTSM) | Fix-Wing |
| Boche et al. [126] | Active | Reconfigurable Control | Fix-Wing |
| Wang et al. [127] | Active | Adaptive Sliding Mode Control | Quadrotor |
| Baldini et al. [128] | Active | Control Reconfiguration | Quadrotor |
| Pedro et al. [129] | Active | PID Control, Control Allocation | Fix-Wing |
| Reference | Subsystem Type | Anomaly Detection Technique/Method | UAV Type |
|---|---|---|---|
| Liang et al. [130] | Sensor Data | Classification-based/Shared Nearest Neighbor-Based Algorithms | Fix-Wing |
| Chen et al. [131] | Wing Structure | Classification-based/Beacon Exception Analysis Method (BEAM) | Fix-Wing |
| Pan et al. [132] | Sensor Data | Classification-based/Active Learning & S3VM | UAV |
| Bronz et al. [133] | Actuator Failure | Classification-based/Support Vector Machine (SVM) | Fixed-Wing |
| Varigonda et al. [134] | Flight parameters | Model-based | Quadrotor |
| Titouna et al. [135] | Altitude System | Statistics-based & Classification-based | Fix-Wing |
| Keipour et al. [136] | Actuator and Engine Faults | Statistics-based/Recursive Least Squares | Fix-Wing |
| Khan et al. [9] | Sensors | Clustering-based & Classification-based & Statistics-based | Quadrotor |
| Wang et al. [137] | Bias and Drift Anomaly on Flight Data | Statistics-based | UAV |
| Wang et al. [138] | Sensor Data | Classification-based | UAV |
| Ahn et al. [139] | Drone Failure of a Swarm | Clustering-based & Classification-based & Spectral-based | Quadrotor |
| Pourpanah et al. [140] | Motors and Propellers | Classification-based | Quadrotor |
| Lu et al. [141] | Motor | Classification-based | Quadrotor |
| Chen et al. [142] | Vertical Speed | Classification-based | Fix-Wing |
| Pan et al. [143] | Sensor Data | Classification-based & Spectral-based | UAV |
| Freeman et al. [144] | Actuators | Model-Based | Fix-Wind |
| Afridi et al. [145] | Altitude Control Unit | Classification-based | Fix-Wing |
| Lin et al. [146] | Sensors | Statistics-based | UAV |
| UAV Type | Sensor Type | Method Type |
|---|---|---|
| Rotary Wing: 51% | IMU: 39% | Model-Based: 71% |
| Fix-Wing: 39% | Position: 16% | Knowledge-Based: 23% |
| Misc: 10% | Gyroscope: 13% | Hardware Redundancy: 6% |
| Misc.: 32% |
| UAV Type | Actuator Type | Method Type |
|---|---|---|
| Rotary-Wing: 50% | Rotor/Motor: 67% | Model-Based: 87% |
| Fix-Wing: 37% | Elevator, Ailerons, Rudder: 23% | Knowledge-Based: 10% |
| VTOL: 7% | Misc.: 10% | Hardware-Based: 3% |
| Misc.: 7% |
| UAV Type | Method Type | FTC Method |
|---|---|---|
| Rotary-Wing: 60% | Active: 57% | Sliding Mode: 29% |
| Fix-Wing: 34% | Passive: 38% | Adaptive Control: 16% |
| Misc.: 6% | Hybrid-FTC: 5% | Misc.: 55% |
| UAV Type | Subsystem Type | Method Type |
|---|---|---|
| Fix-Wing: 44% | Sensors: 44% | Classification-based: 55% |
| Rotary-Wing: 28% | Actuators: 33% | Statistics-based: 22% |
| Undifined UAV: 28% | Misc.: 22% | Model-based: 11% |
| Spectral-based: 6% | ||
| Clustering-based: 6% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fourlas, G.K.; Karras, G.C. A Survey on Fault Diagnosis and Fault-Tolerant Control Methods for Unmanned Aerial Vehicles. Machines 2021, 9, 197. https://doi.org/10.3390/machines9090197
Fourlas GK, Karras GC. A Survey on Fault Diagnosis and Fault-Tolerant Control Methods for Unmanned Aerial Vehicles. Machines. 2021; 9(9):197. https://doi.org/10.3390/machines9090197
Chicago/Turabian StyleFourlas, George K., and George C. Karras. 2021. "A Survey on Fault Diagnosis and Fault-Tolerant Control Methods for Unmanned Aerial Vehicles" Machines 9, no. 9: 197. https://doi.org/10.3390/machines9090197
APA StyleFourlas, G. K., & Karras, G. C. (2021). A Survey on Fault Diagnosis and Fault-Tolerant Control Methods for Unmanned Aerial Vehicles. Machines, 9(9), 197. https://doi.org/10.3390/machines9090197