
Research on the Multi-Robot Cooperative Pursuit Strategy Based on the Zero-Sum Game and Surrounding Points Adjustment

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The problem of multi-robot cooperative pursuit: a multi-robot cooperative pursuit strategy including two stages and considering both pursuit robot position adjustment and the pursuit robots’ pursuit of the eacape robots based on a zero-sum game is proposed to improve the success rate of the pursuit task;
- The cooperation of the pursuit robots and the competition between the pursuit robots and the escape robot are considered comprehensively to establish a zero-sum game model in this paper, which avoids conflict among the pursuit robots and improves the safety of the multi-robot system during the pursuit process.
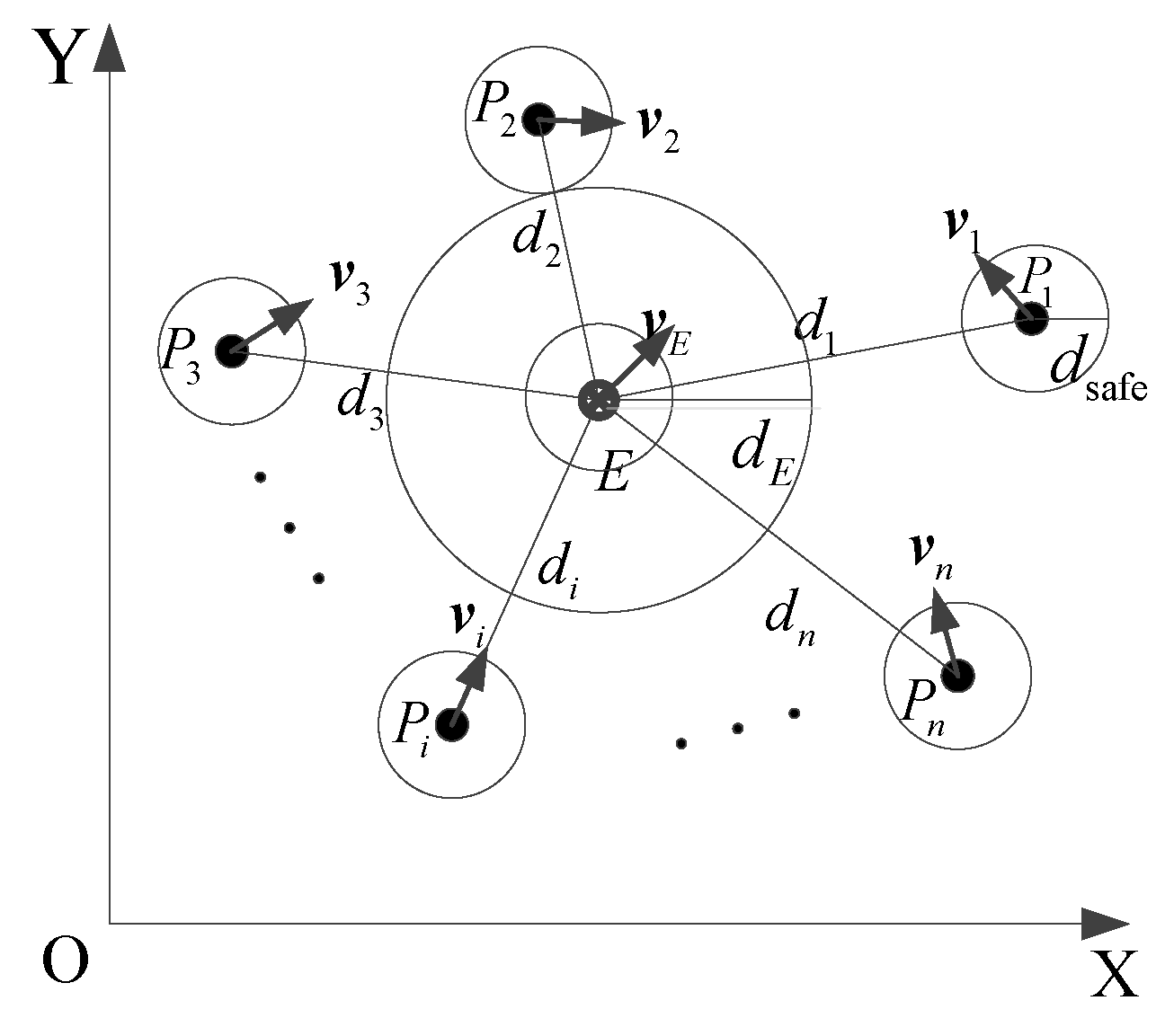
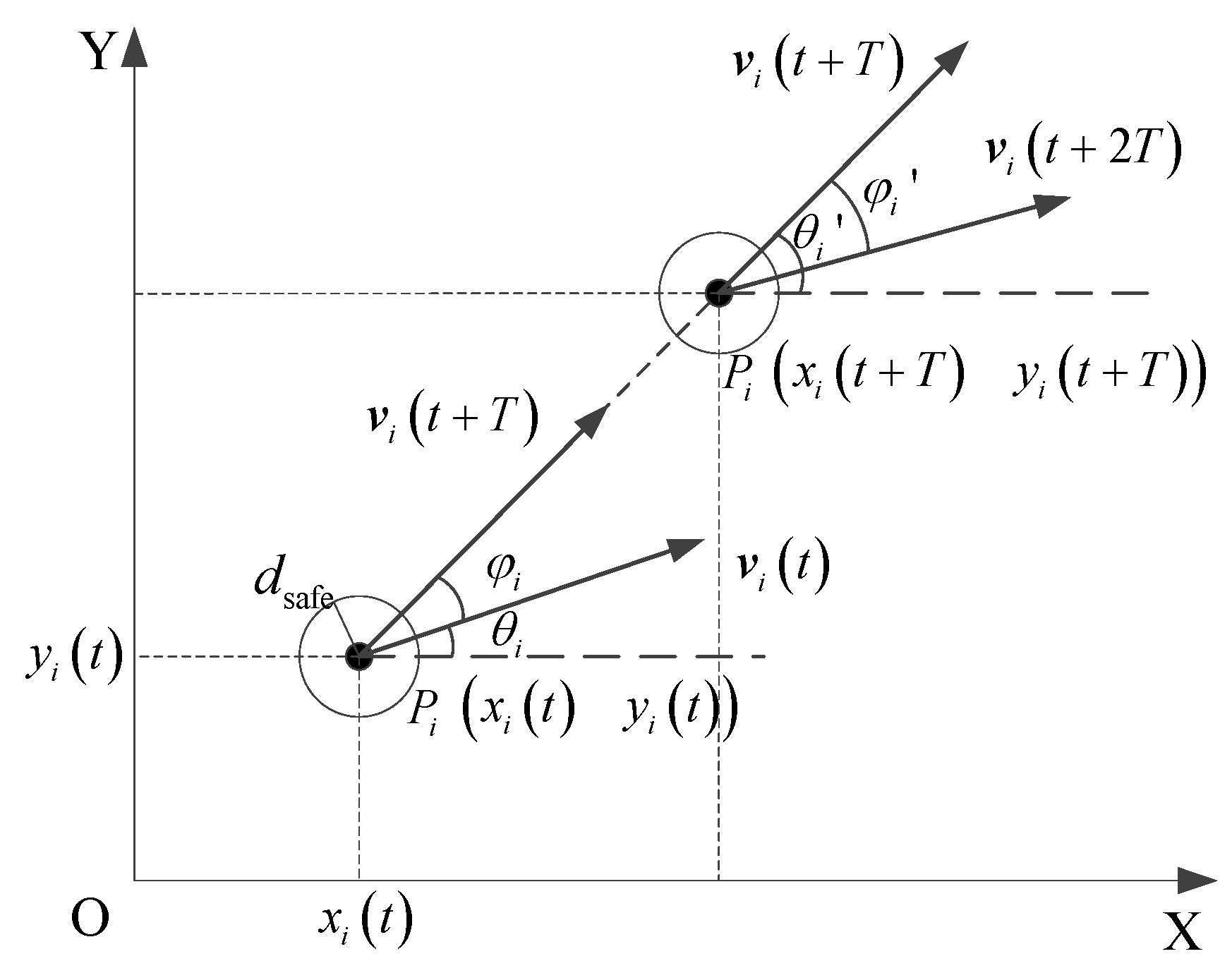
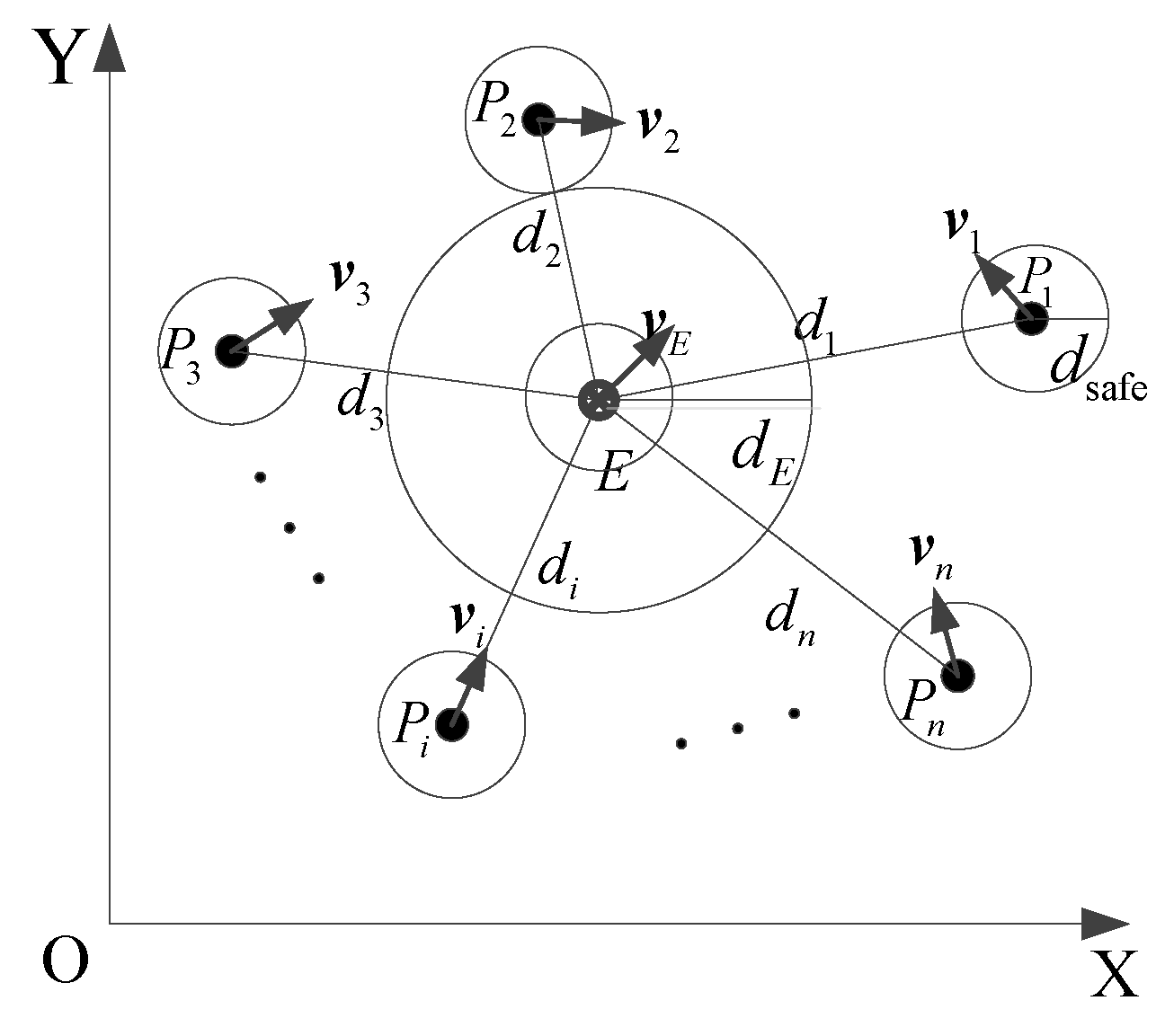
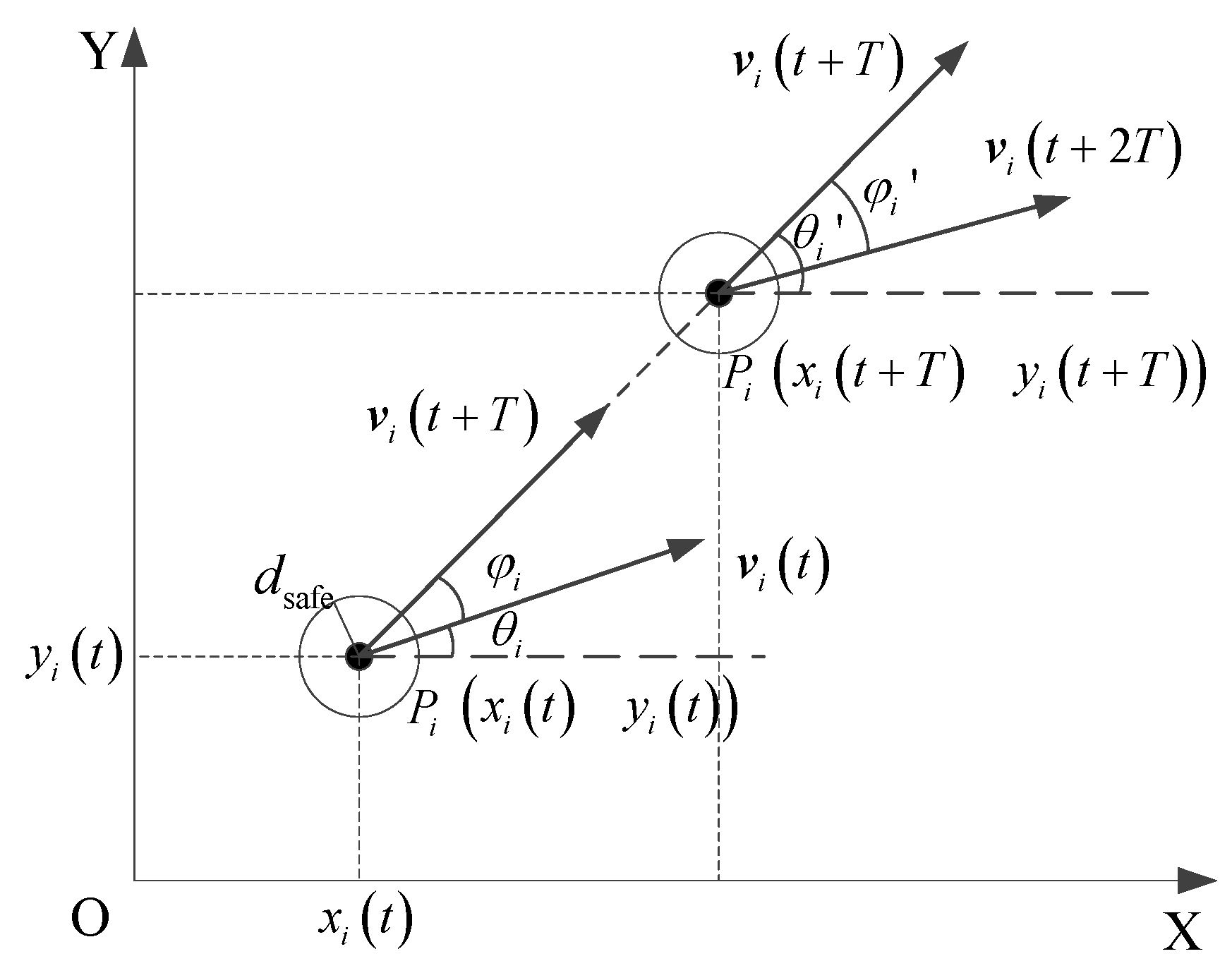
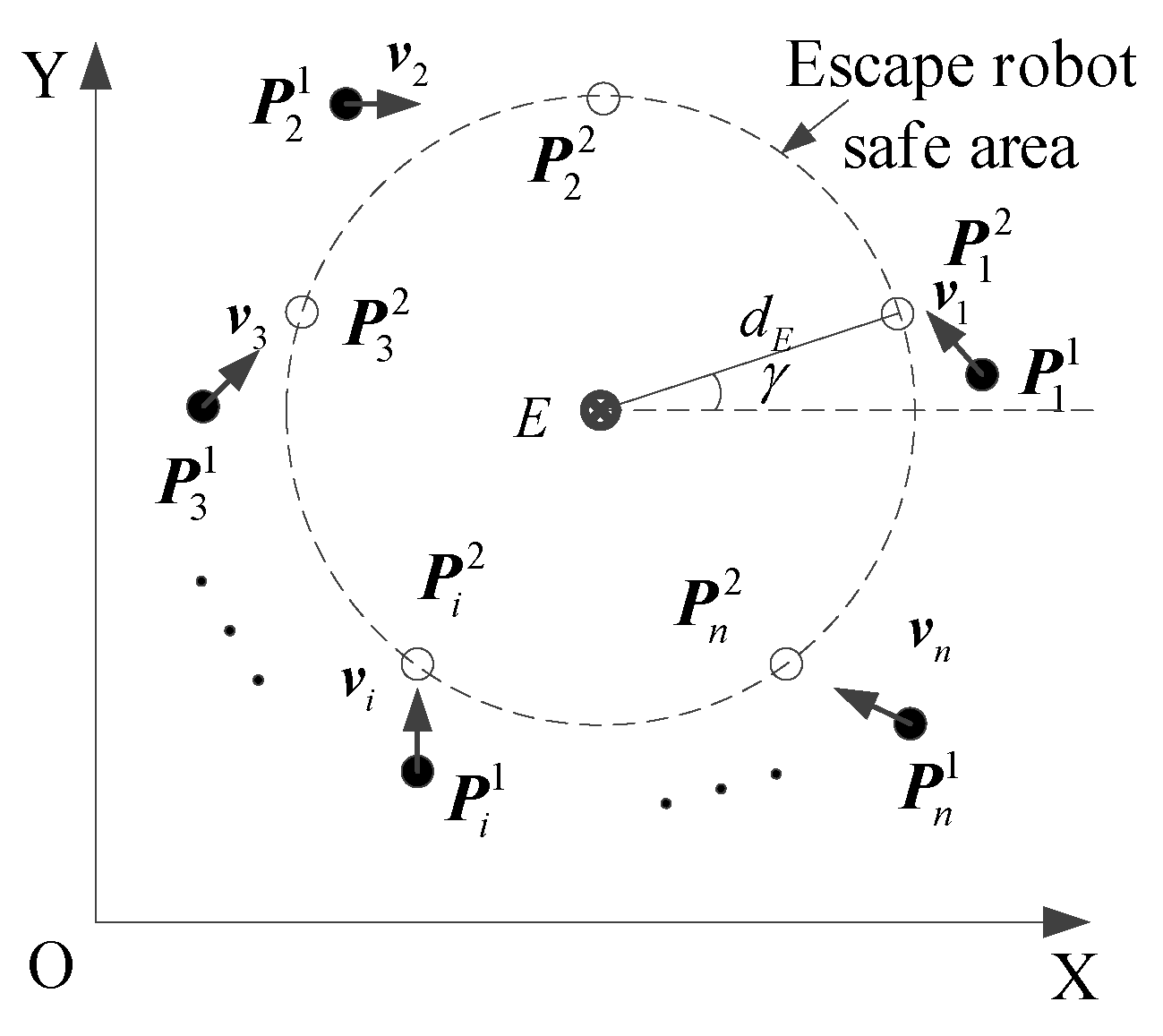
2. The Description of the Multi-Robot Pursuit Problem
3. Movement Strategy Solving Method Based on Zero-Sum Game
3.1. Establishment of Multi-robot Pursuit Zero-Sum Game Model
- Pursuit robot team distribution and maintenance item :
- 2.
- Pursuit distance item :
- 3.
- Robot collision avoidance item :
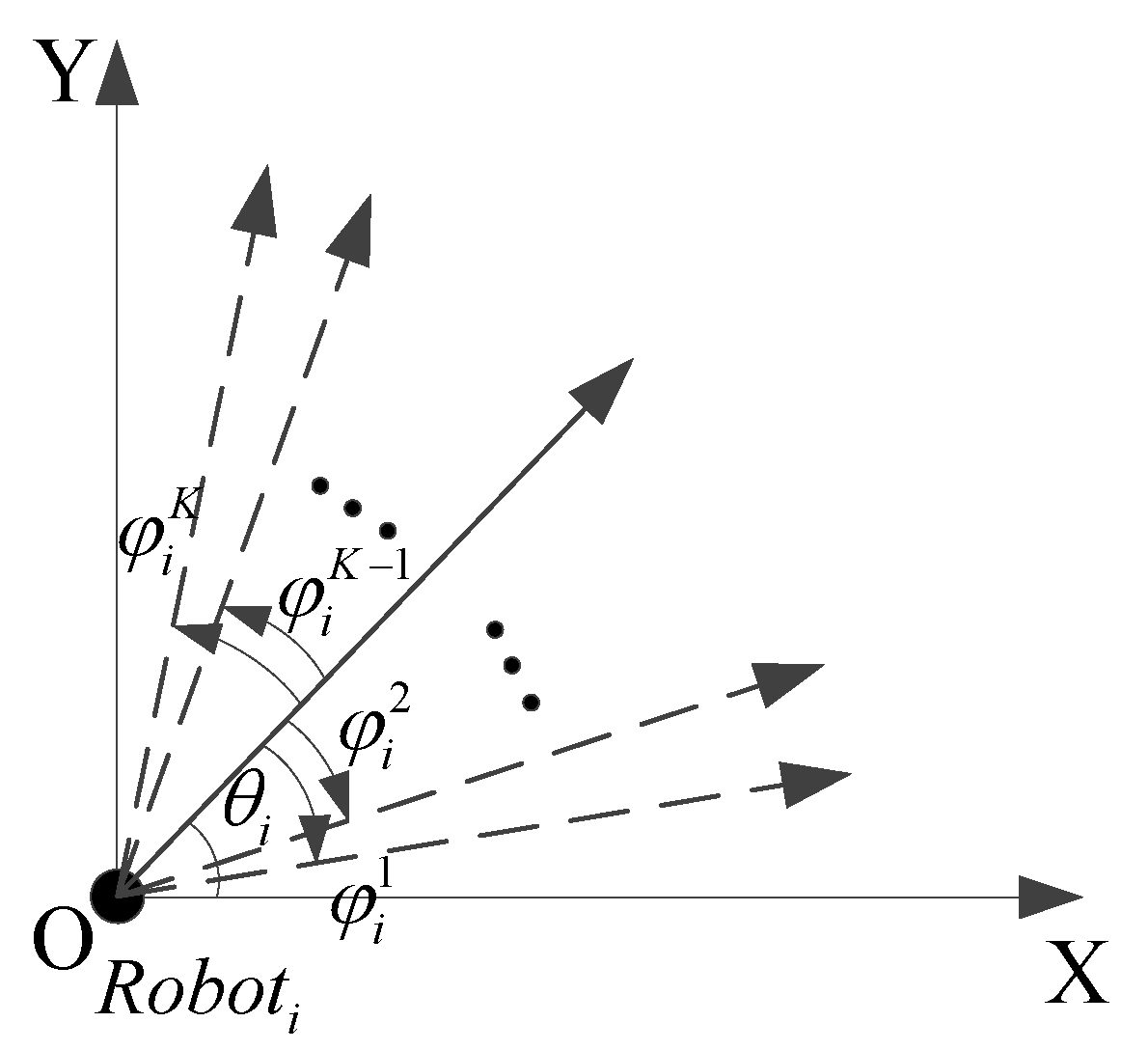
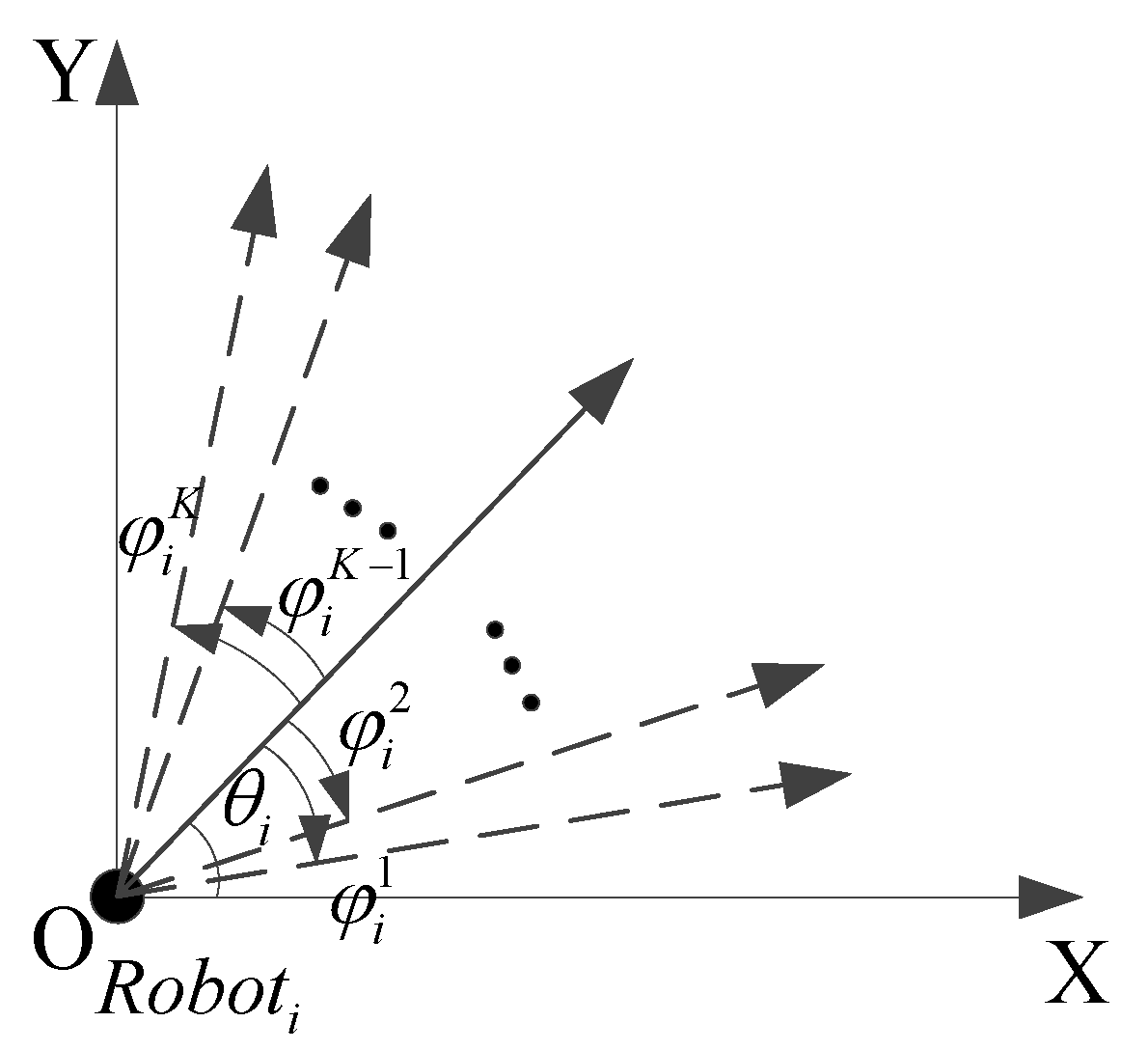
3.2. The Solution Method of Optimal Game Movement Strategy
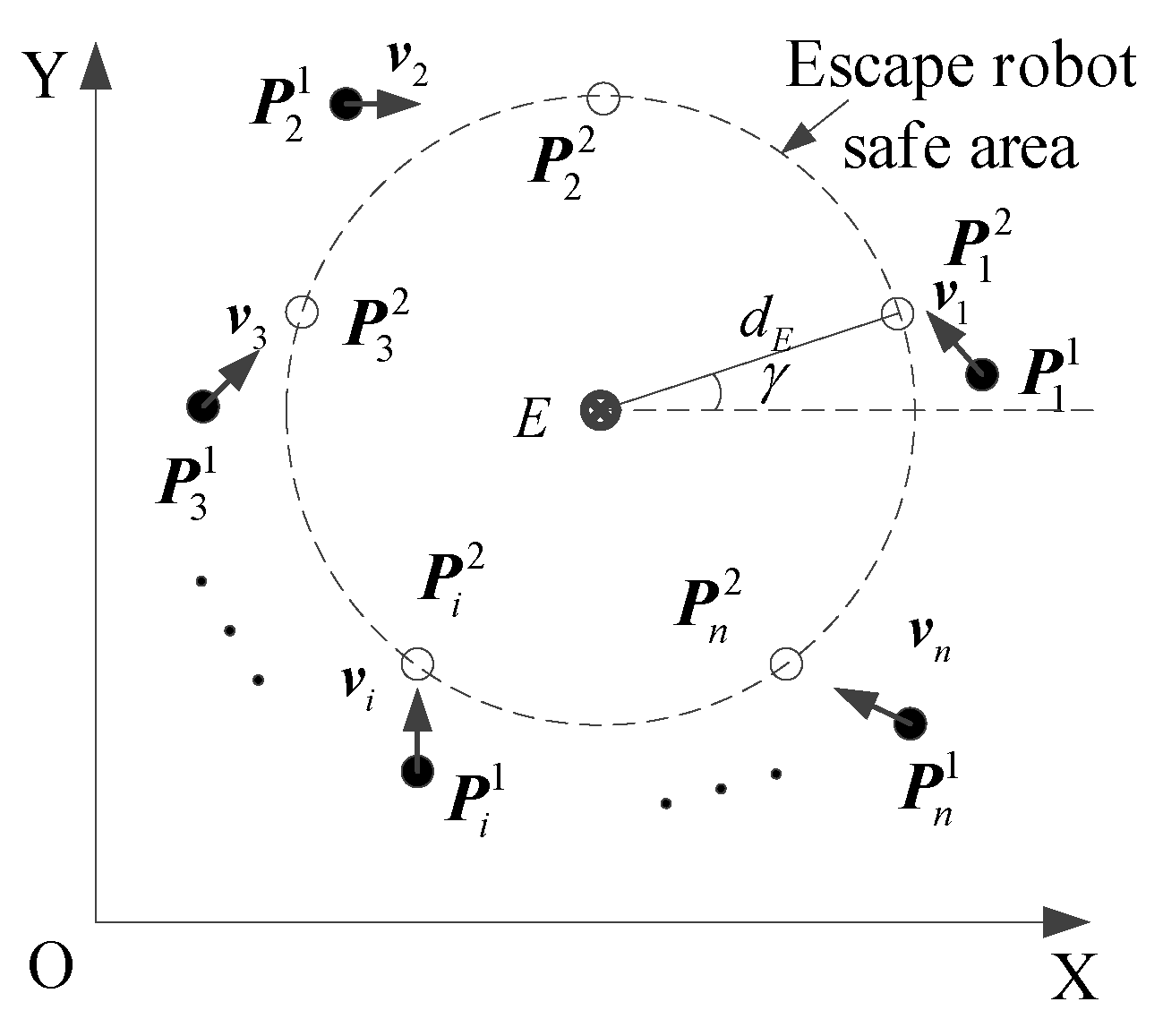
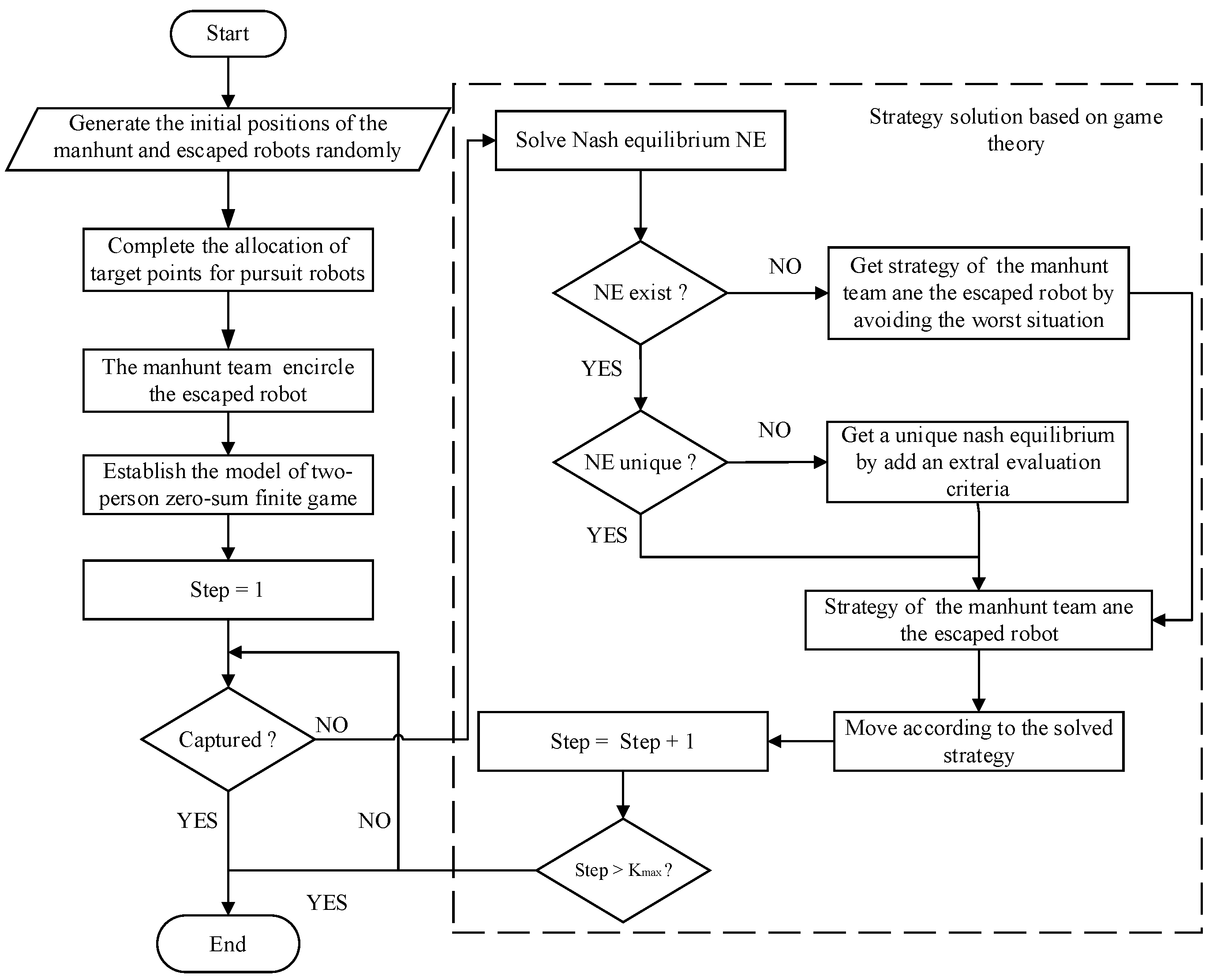
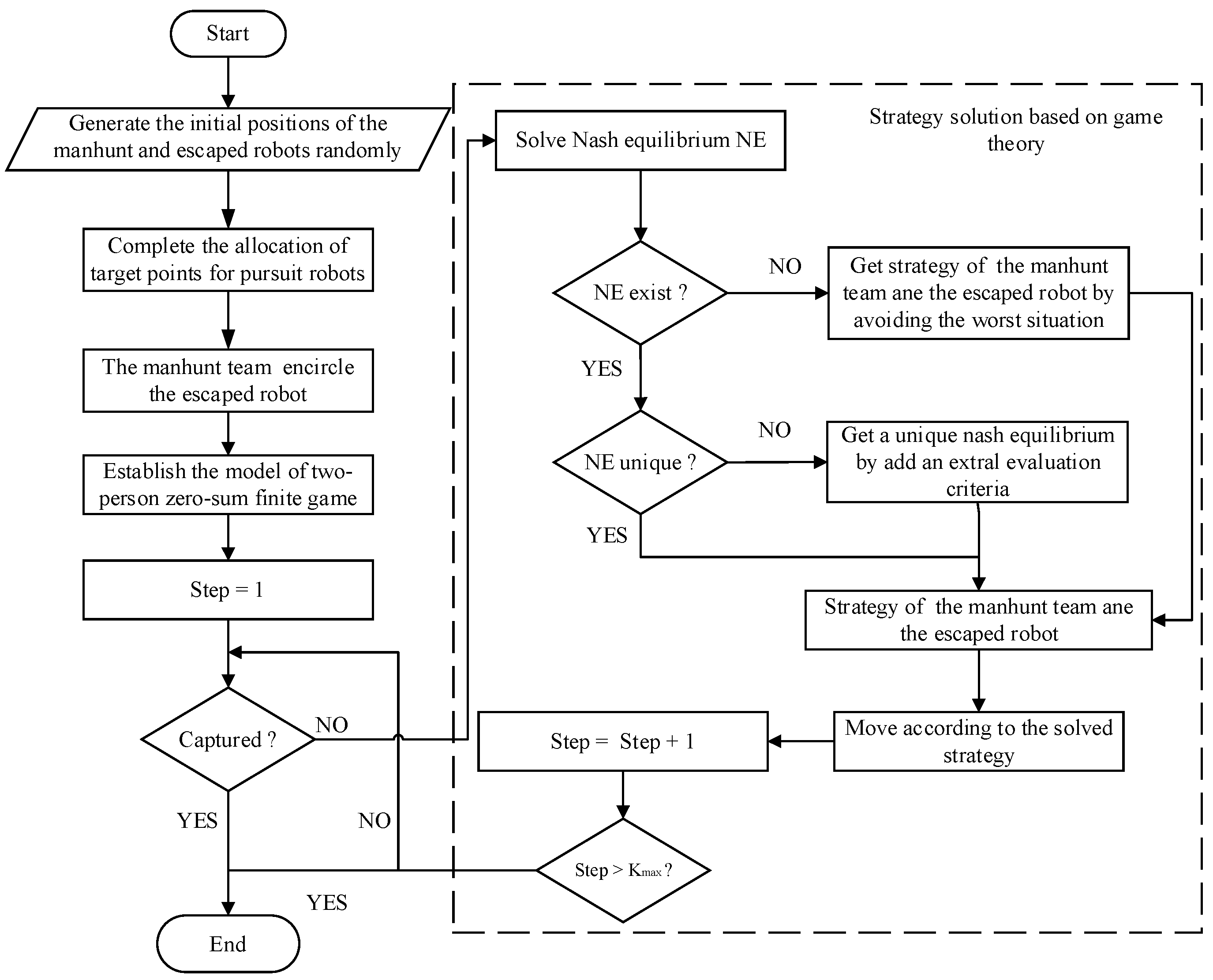
4. Design of Multi-Robot Pursuit Strategy
- Step 1:
- Randomly generate the initial positions of the pursuit robots and the escape robot;
- Step 2:
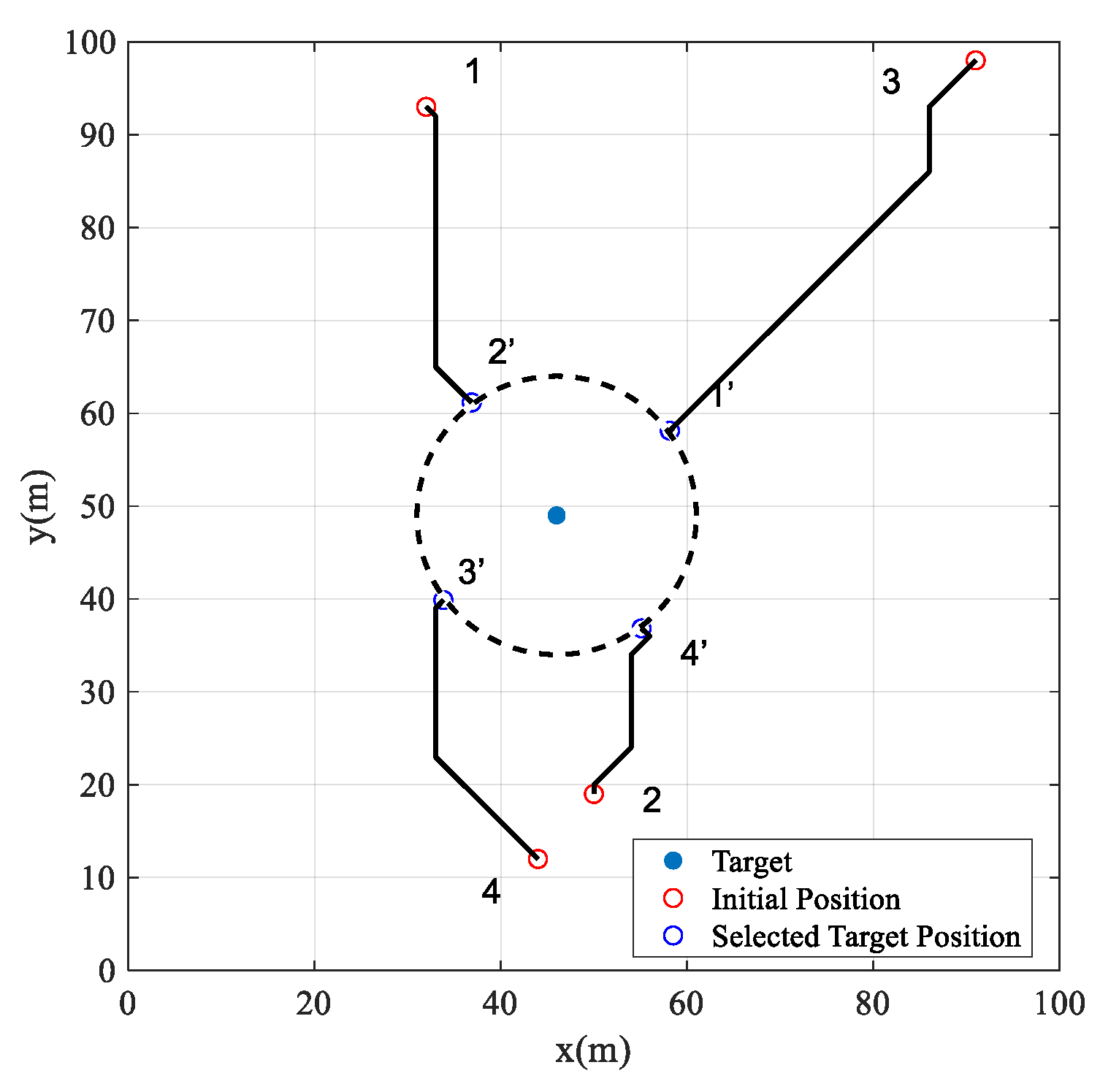
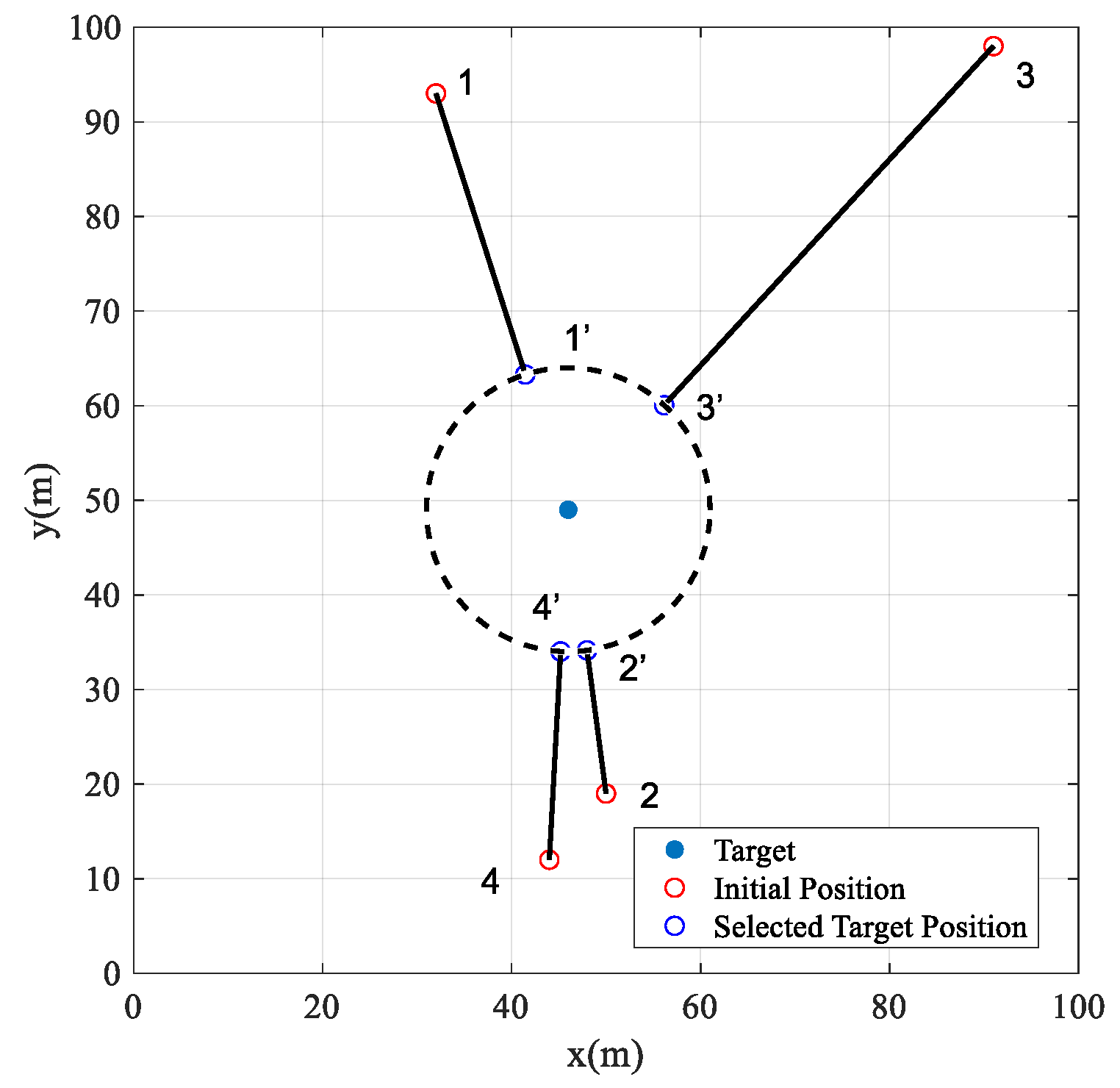
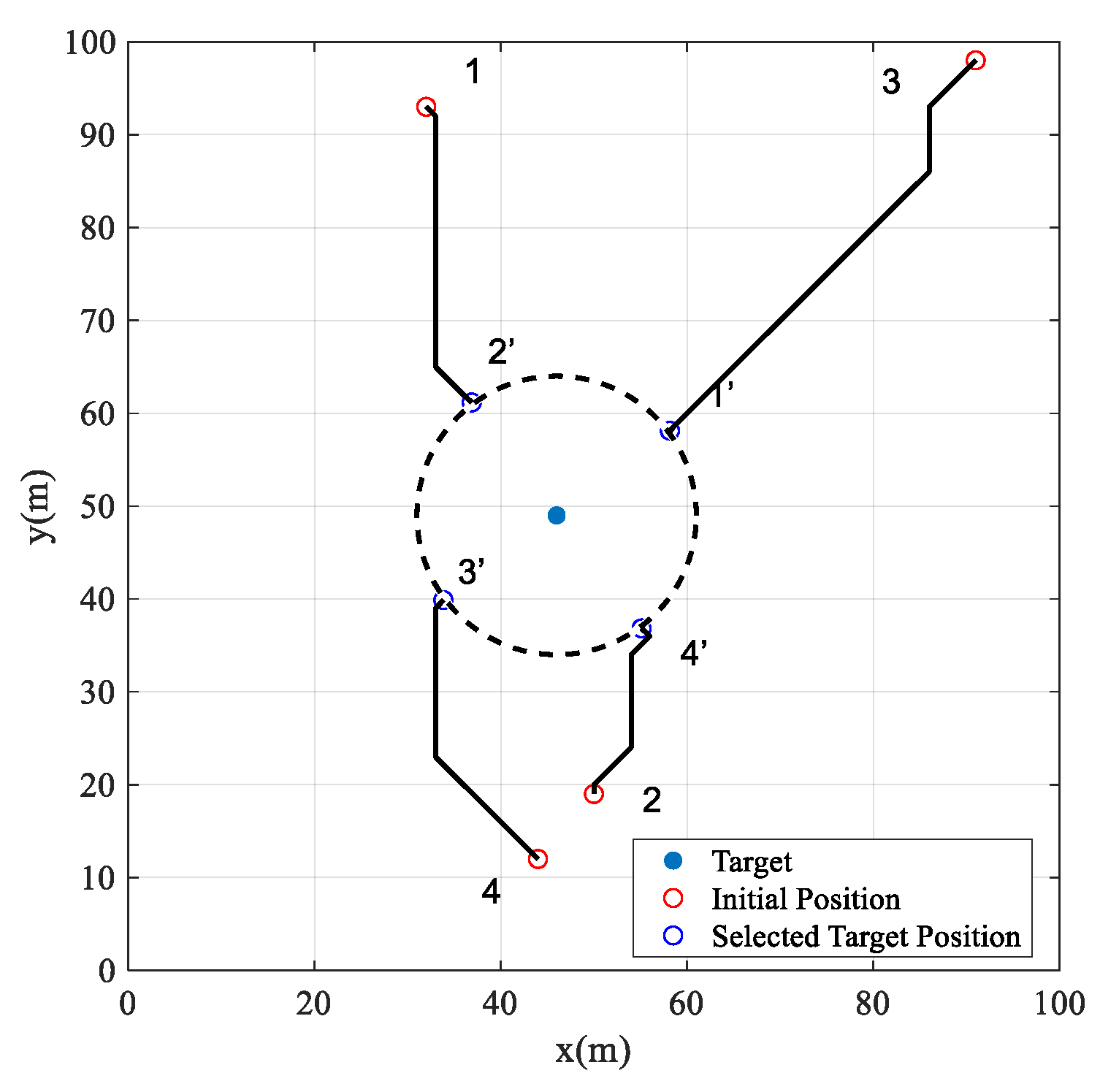
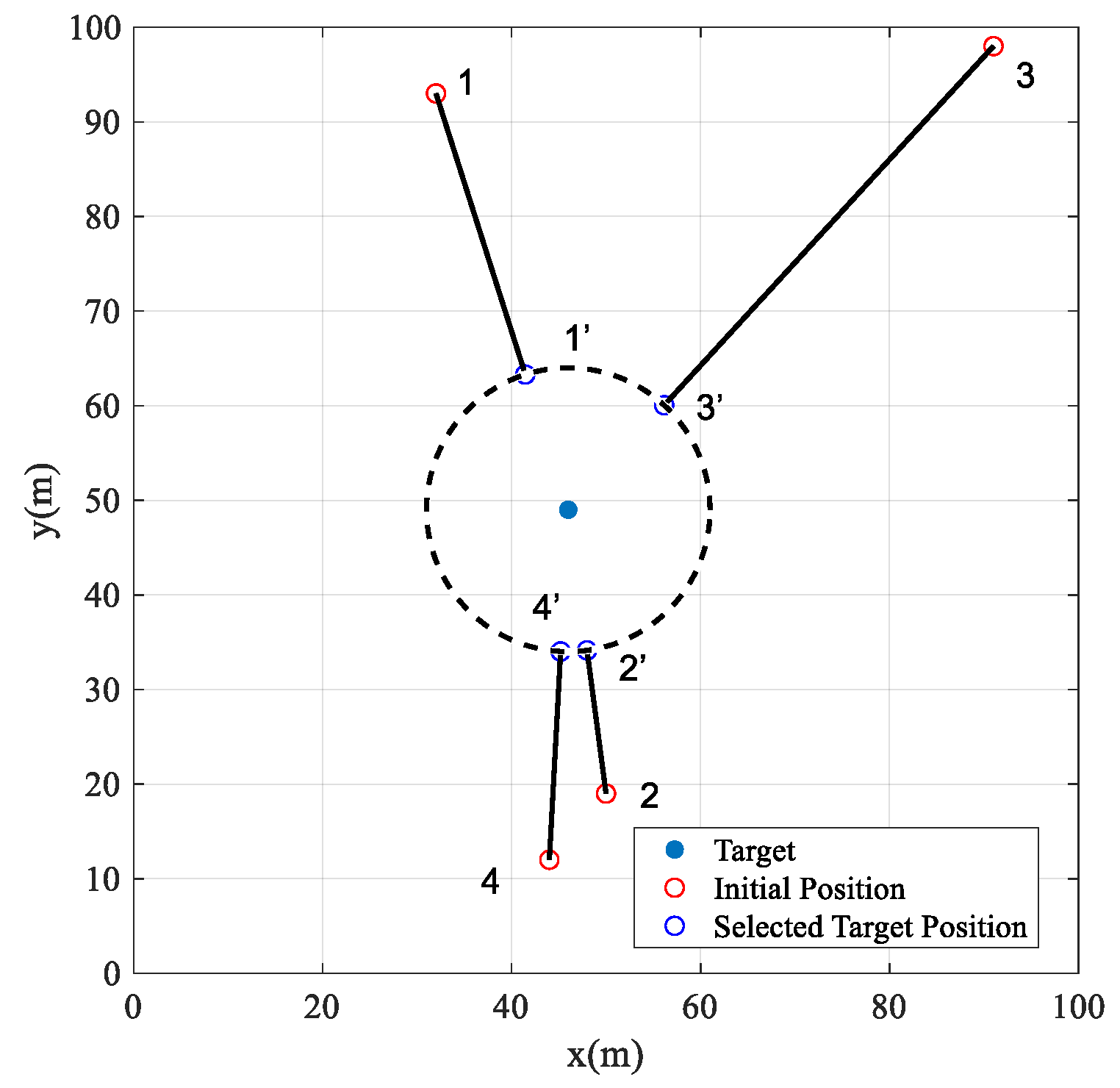
- The initial position distribution constraints of the pursuit task are considered to select the target position of the pursuit robots to surround the escape robot and use the Hungarian algorithm to complete the target position allocation of each pursuit robot;
- Step 3:
- Each pursuit robot moves according to the result of the target position allocation and forms a surrounding configuration for the escape robot;
- Step 4:
- A zero-sum game model of the multi-robot pursuit problem is established;
- Step 5:
- The zero-sum game model is solved to obtain the movement strategies of the pursuit robots and the escape robot at each decision-making stage and to complete the pursuit process of the escape robot.
5. Results and Discussion
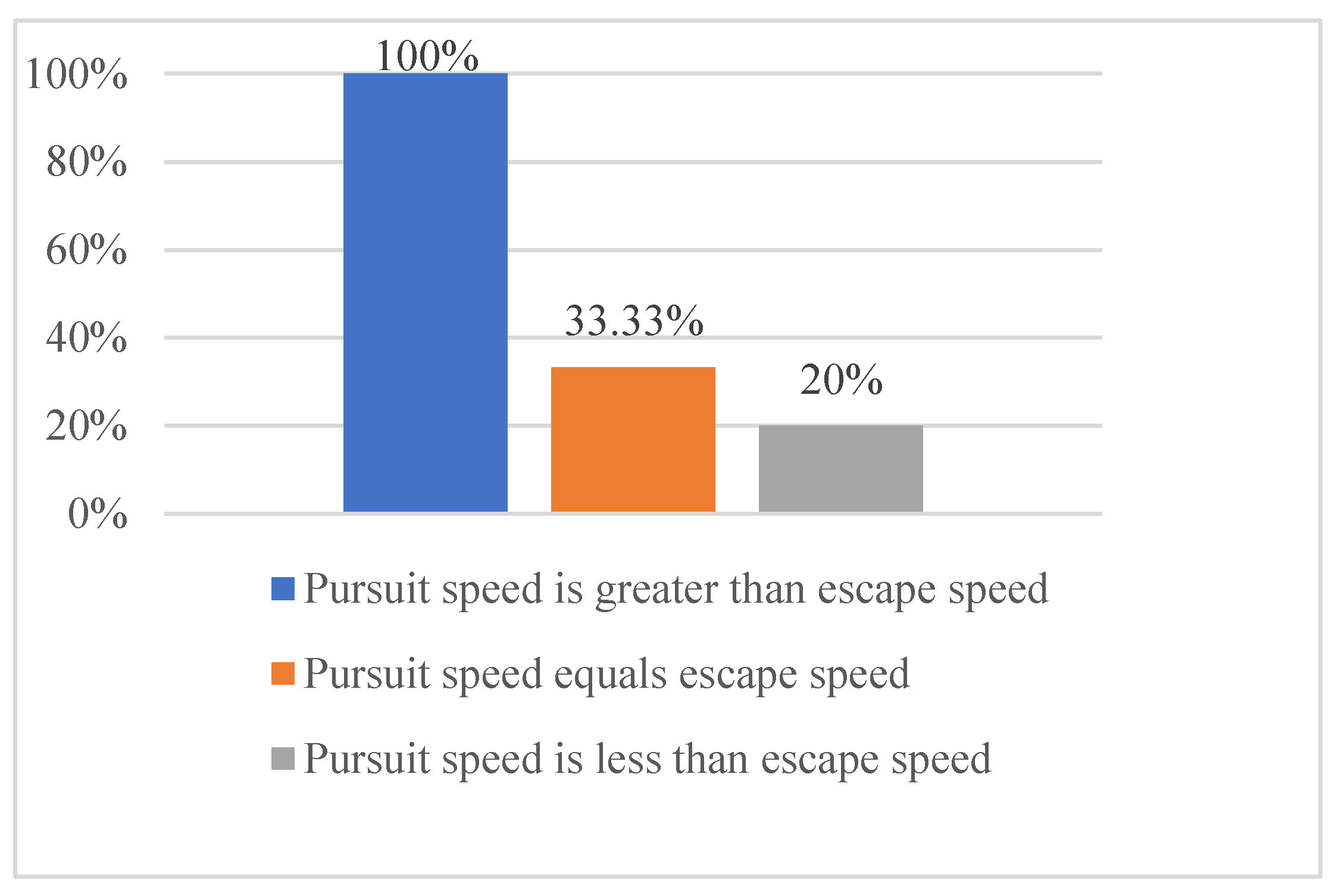
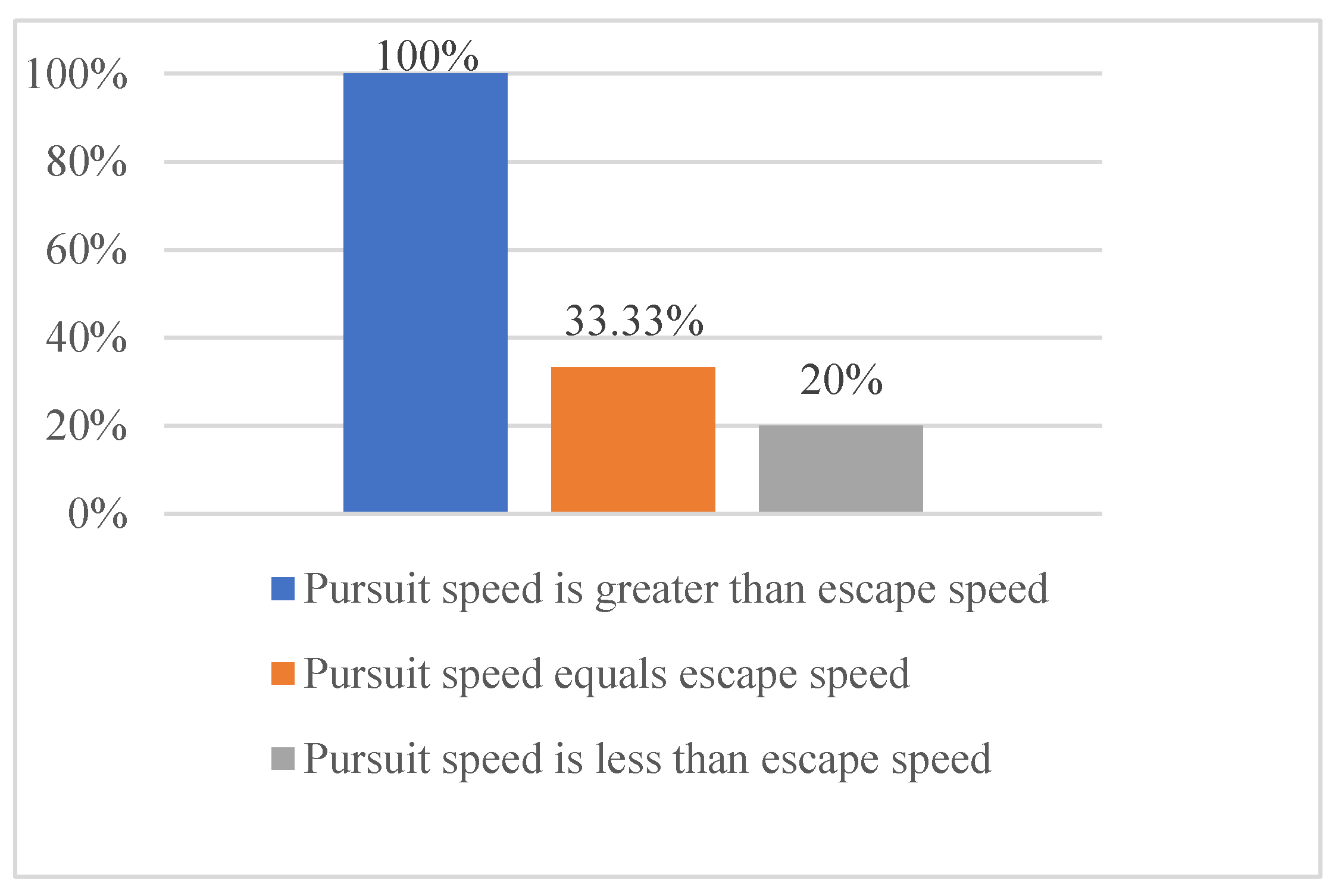
5.1. Verification of the Multi-Robot Game Pursuit Model
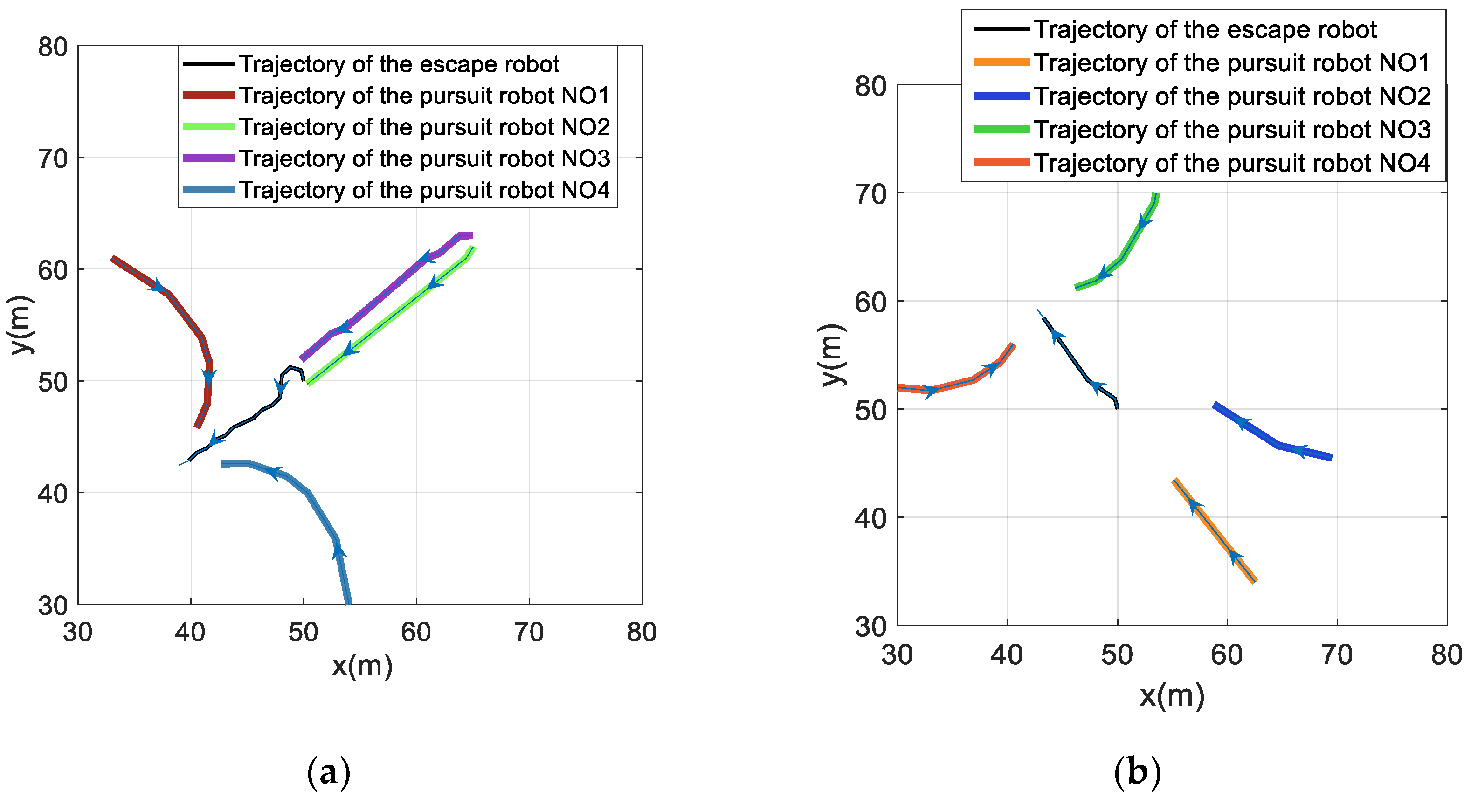
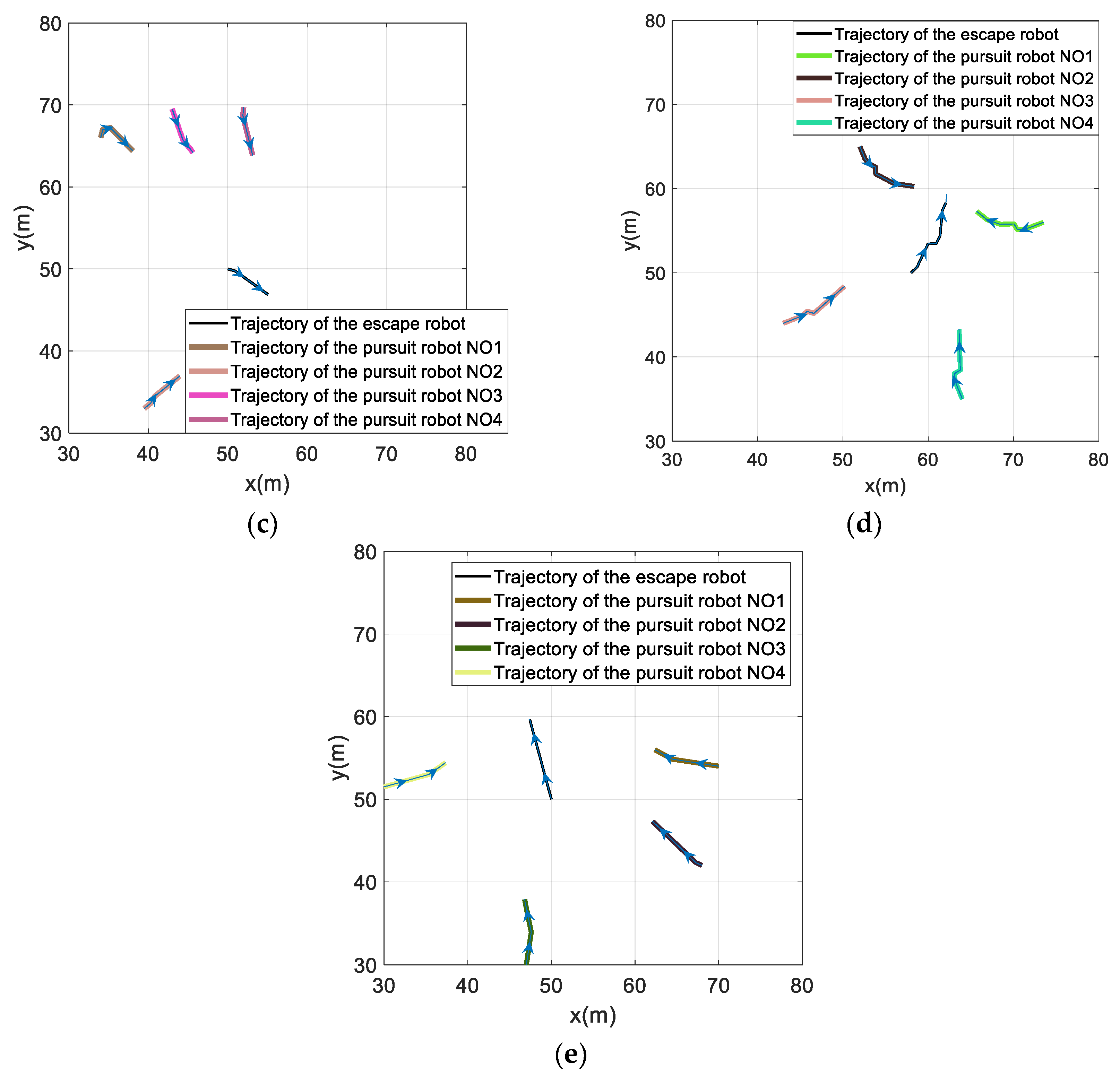
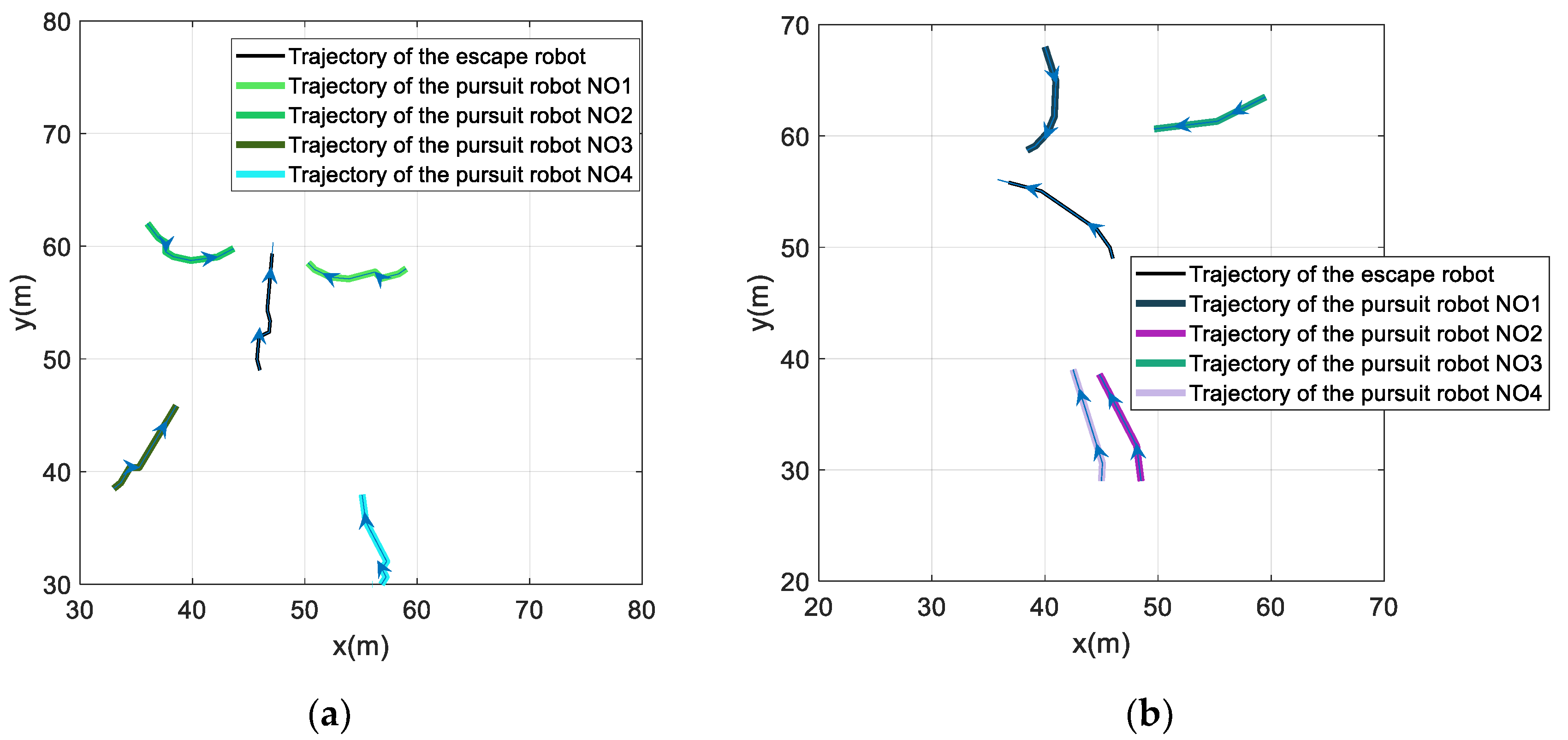
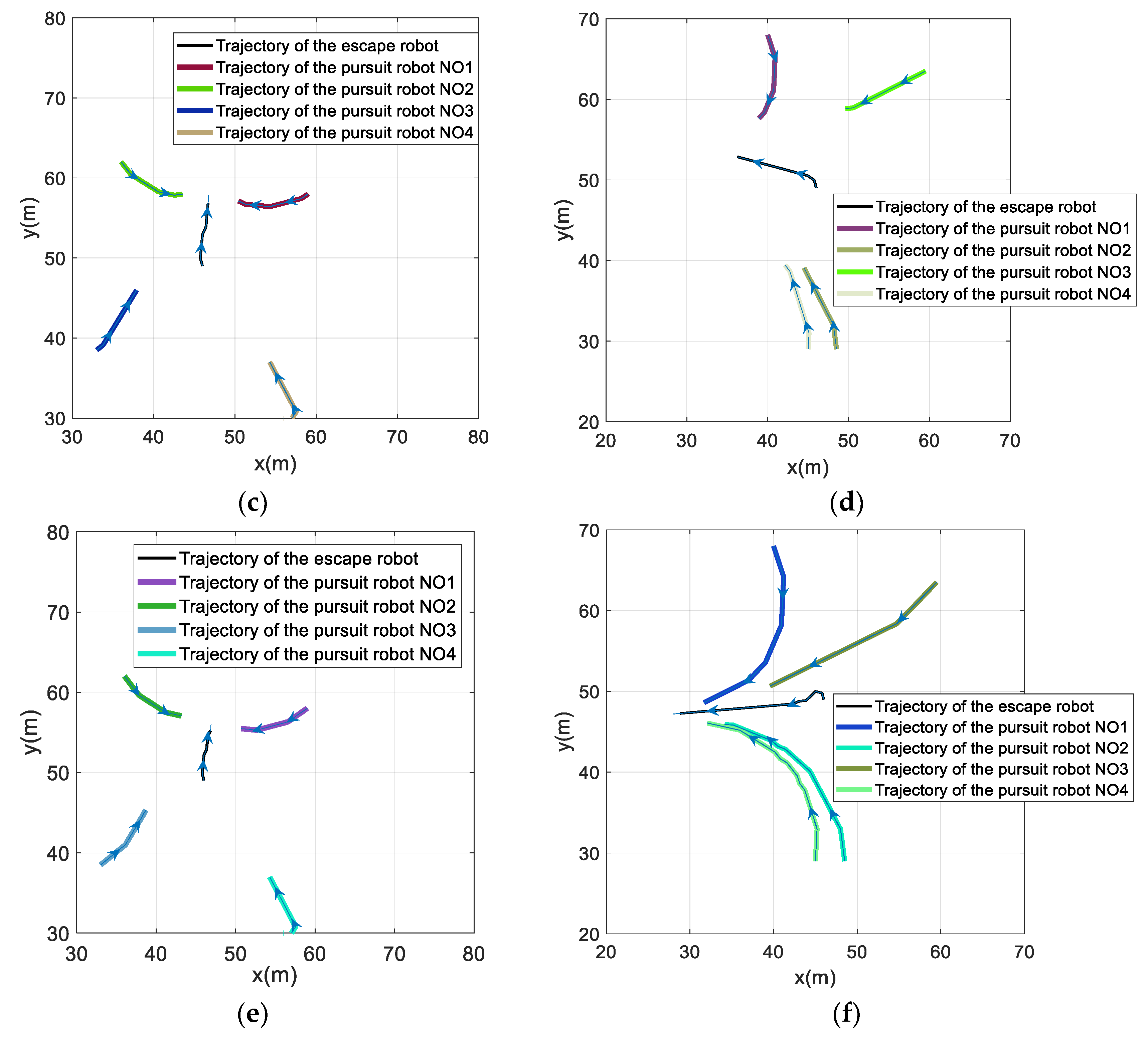
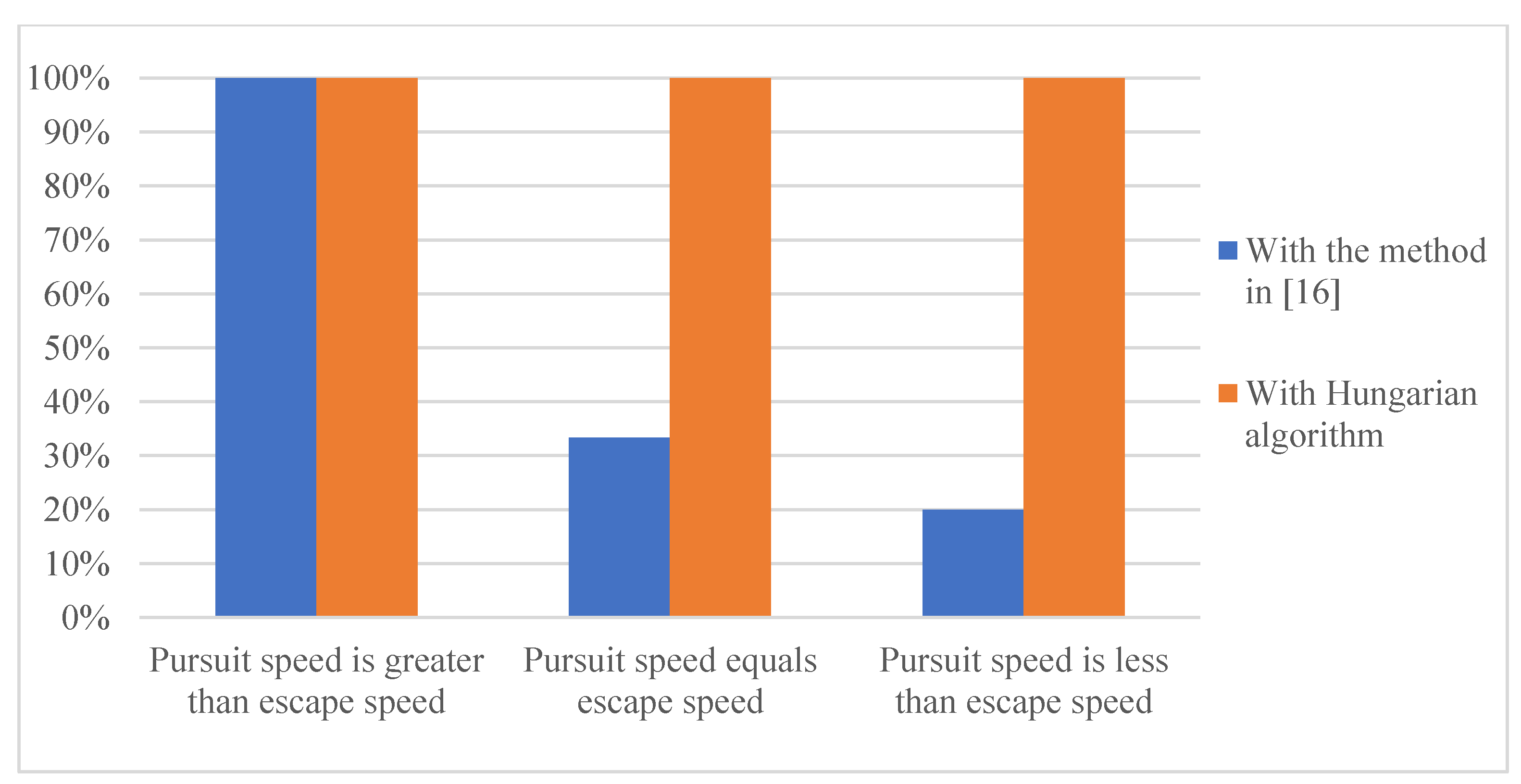
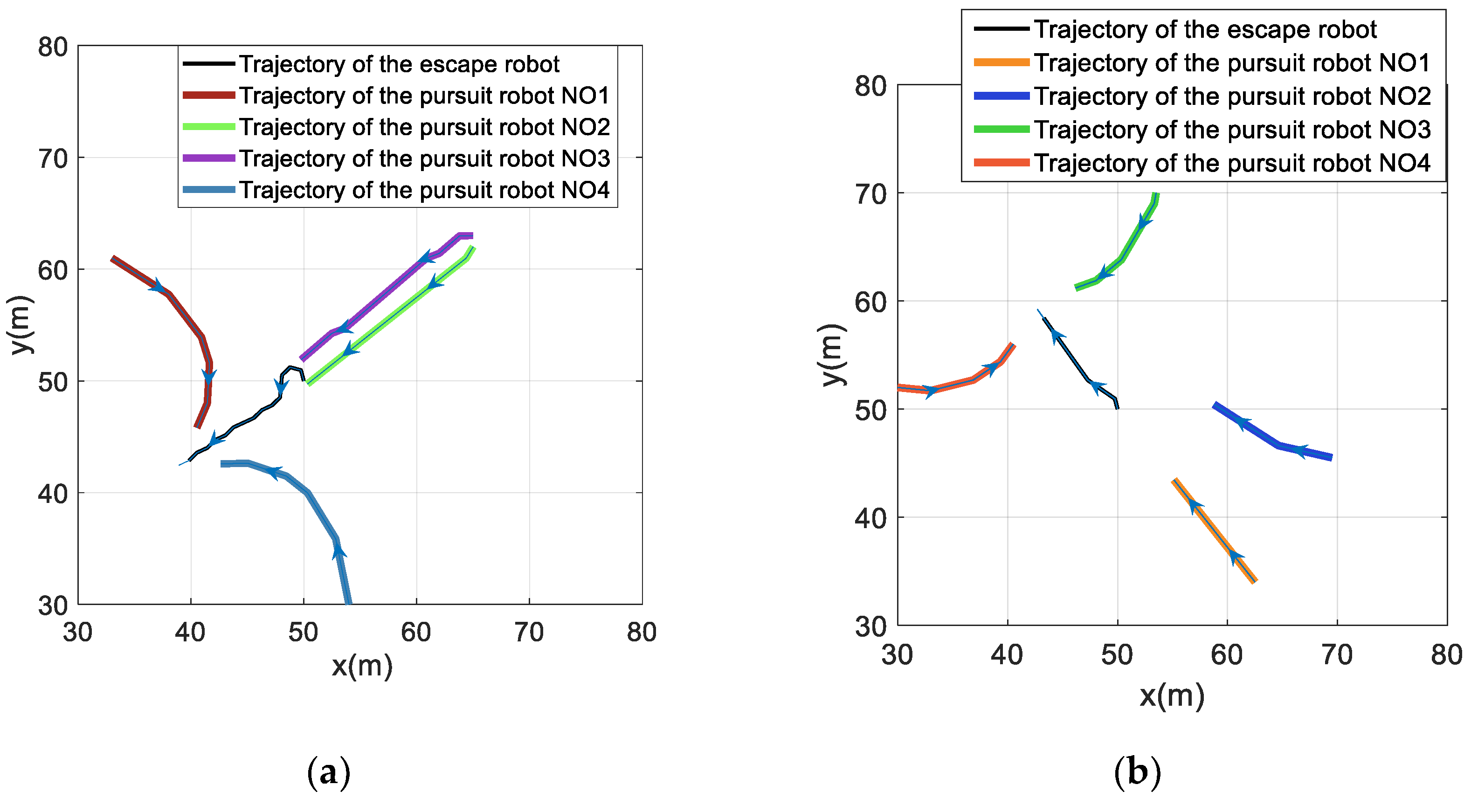
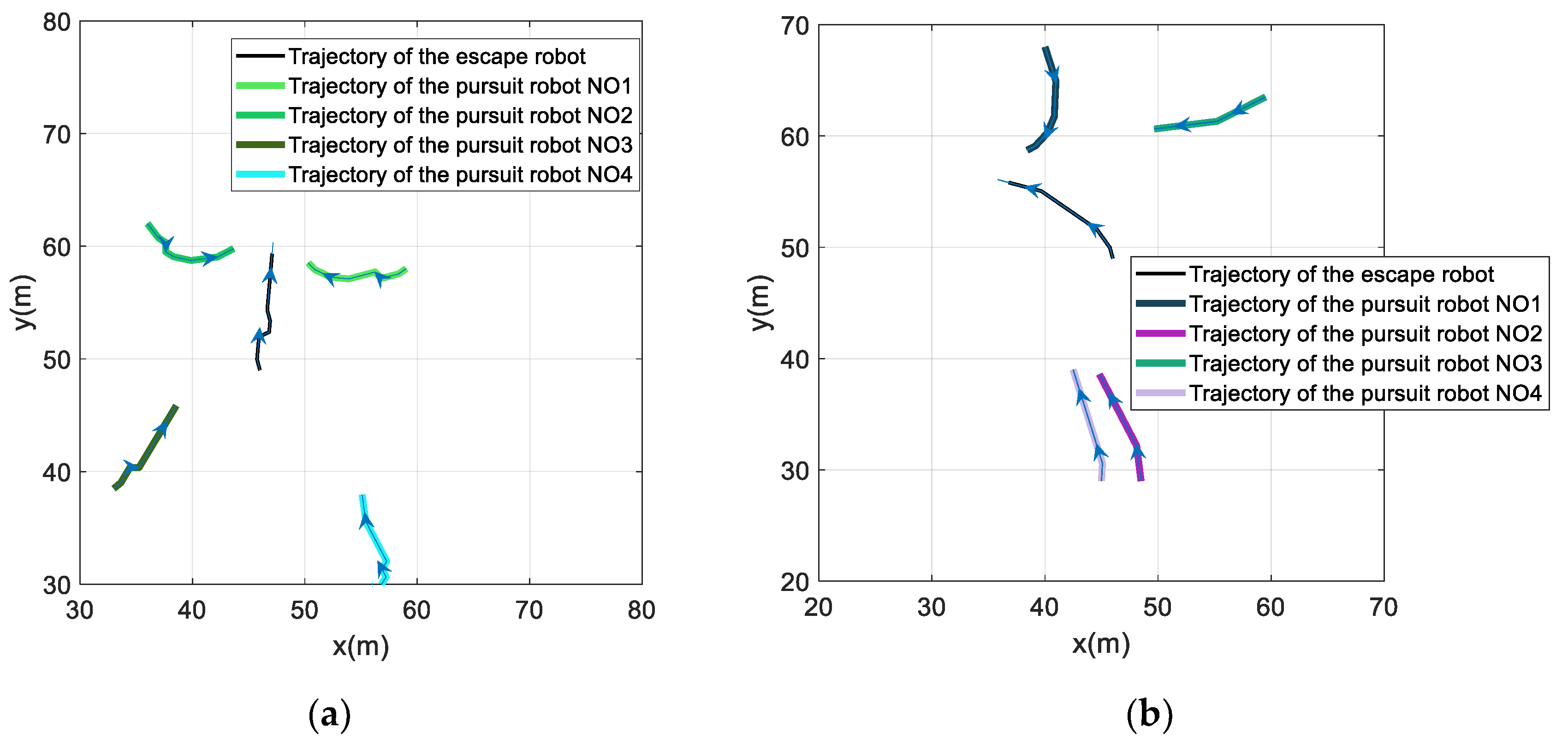
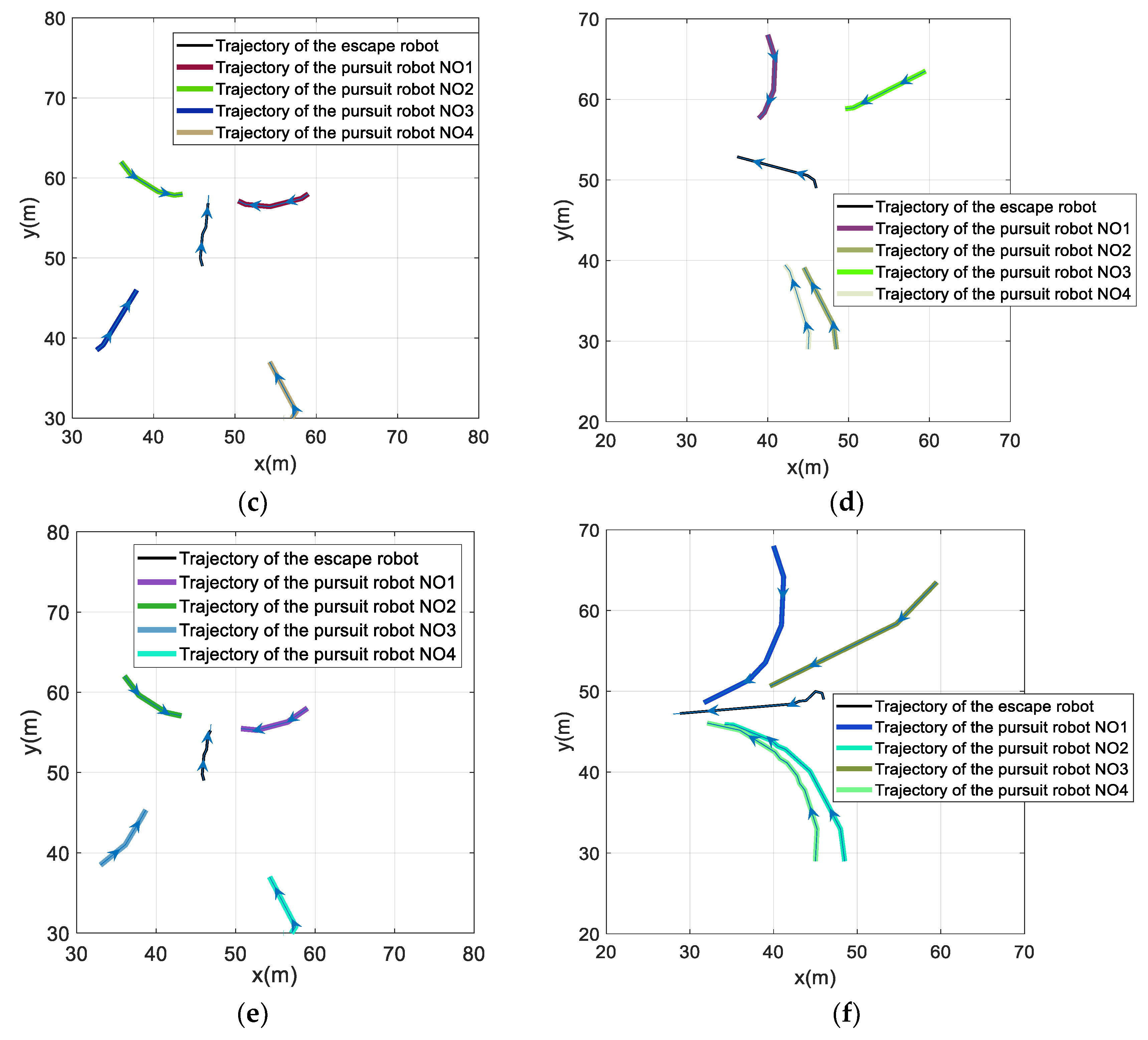
5.2. Validation of the Multi-Robot Cooperative Pursuit Strategy
6. Conclusions
- A multi-robot cooperative pursuit strategy was designed, and the pursuit task was divided into two stages: pursuit robot position adjustment and game pursuit, which improved the success rate of multi-robot cooperative pursuit tasks;
- The game model of the multi-robot cooperative pursuit tasks was optimized based on a zero-sum game, which comprehensively considered the cooperative relationship between the pursuit robots and the confrontation relationship between the pursuit robot team and the escape robot in the multi-robot cooperative pursuit process. Three pursuit robots team distribution payoff functions and a maintenance item, a pursuit distance item, and a robot collision avoidance item were constructed to give full weight to the advantages of the multi-robot cooperation and to ensure that the multi-robot cooperative pursuit task was completed based on the safe operation of the robots.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gautam, A.; Mohan, S. A review of research in multi-robot systems. In Proceedings of the 2012 IEEE 7th International Conference on Industrial and Information Systems, Chennai, India, 6–9 August 2012; pp. 1–5. [Google Scholar]
- Hung, P.D.; Vinh, T.Q.; Ngo, T.D. A Scalable, Decentralised Large-Scale Network of Mobile Robots for Multi-target Tracking. In Proceedings of the Intelligent Autonomous Systems 13, Padova, Italy, 15–18 July 2014; pp. 621–637. [Google Scholar]
- Nestmeyer, T.; Giordano, P.R.; Bülthoff, H.H.; Franchi, A. Decentralized Simultaneous Multi-target Exploration using a Connected Network of Multiple Robots. Autonation Robot. 2017, 41, 989–1011. [Google Scholar] [CrossRef] [Green Version]
- Emoto, S.; Akkaya, I.; Lee, E.A. Information seeking and model predictive control of a cooperative multi-robot system. Artifi-Cial Life Robot. 2016, 21, 393–398. [Google Scholar] [CrossRef]
- Vidal, R.; Shakernia, O.; Kim, H.J.; Shim, D.H.; Sastry, S. Probabilistic pursuit-evasion games: Theory, implementation and experimental evaluation. IEEE Trans. Robot. Autom. 2002, 18, 662–669. [Google Scholar] [CrossRef]
- Ulam, P.D.; Kira, Z.; Arkin, R.C.; Collins, T.R. Mission Specification and Control for Unmanned Aerial and Ground Vehicles for Indoor Target Discovery and Tracking. In Proceedings of the SPIE Defense, Security, and Sensing Symposium, Orlando, FL, USA, 6–9 April 2010; p. 769414. [Google Scholar]
- Kehagias, A. Generalized Cops and Robbers: A Multi-player Pursuit Game on Graphs. Dyn. Games Appl. 2019, 9, 1076–1099. [Google Scholar] [CrossRef] [Green Version]
- Bhattacharya, S.; Paul, G.; Sanyal, S. A cops and robber game in multidimensional grids. Discret. Appl. Math. 2010, 158, 1745–1751. [Google Scholar] [CrossRef] [Green Version]
- Makkapati, V.R.; Tsiotras, P.; Zaccour, G. Optimal Evading Strategies and Task Allocation in Multi-player Pursuit–Evasion Problems. Dyn. Games Appl. 2019, 9, 1168–1187. [Google Scholar] [CrossRef]
- Chen, M.; Zhou, Z.; Tomlin, C.J. Multiplayer reach-avoid games via pairwise outcomes. IEEE Trans. Autom. Control 2017, 62, 1451–1457. [Google Scholar] [CrossRef]
- Garcia, E.; Casbeer, D.W.; Moll, A.V.; Pachter, M. Multiple Pursuer Multiple Evader Differential Games. IEEE Trans. Autom. Control 2020, 66, 2345–2350. [Google Scholar] [CrossRef]
- Lewin, J.; Breakwell, J.V. The surveillance-evasion game of degree. J. Optim. Theory Appl. 1975, 16, 339–353. [Google Scholar] [CrossRef]
- Zha, W.; Chen, J.; Peng, Z.; Gu, D. Construction of Barrier in a Fishing Game With Point Capture. IEEE Trans. Cybern. 2016, 47, 1409–1422. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Zha, W.Z.; Peng, Z.; Gu, D. Multi-player pursuit–evasion games with one superior evader. Automatica 2016, 71, 24–32. [Google Scholar] [CrossRef] [Green Version]
- Jin, S.; Qu, Z. Pursuit-evasion games with multi-pursuer vs. one fast evader. In Proceedings of the 8th World Congress on Intelligent Control and Automation, Jinan, China, 7–9 July 2010; pp. 3184–3189. [Google Scholar]
- Su, Z.B.; Su, J.L.; Tong, L. Strategy of Cooperative Hunting by Multiple Mobile Robots. J. Beijing Inst. Technol. 2004, 5, 32–35. [Google Scholar]
- Benda, M. On Optimal Cooperation of Knowledge Sources-an Empirical Investigation; Technical Report; Boeing Advanced Technology Center: Washington, DC, USA, 1986. [Google Scholar]
- Korf, R. A Simple Solution to Pursuit Games. In Proceedings of the International Workshop on DAI, Delhi, India, 5–7 February 1992; pp. 83–194. [Google Scholar]
- Zhou, P.C.; Hong, B.R. Group robot pursuit-evasion problem based on game theory. J. Harbin Inst. Technol. 2003, 35, 1056–1059. [Google Scholar]
- Skrzypczyk, K. Control of a Team of Mobile Robots Based on Non-cooperative Equilibria with Partial Coordination. Int. J. Appl. Math. Comput. Sci. 2005, 15, 89–97. [Google Scholar]
- Selvakumar, J.; Bakolas, E. Evasion with Terminal Constraints from a Group of Pursuers using aMatrix Game Formulation. In Proceedings of the 2017 American Control Conference, New York, NY, USA, 24–26 May 2017; pp. 1604–1609. [Google Scholar]
- Alexopoulos, A.; Badreddin, E. Decomposition of multi-player games on the example of pursuit-evasion games with unmanned aerial vehicles. In Proceedings of the 2016 American Control Conference (ACC), New York, NY, USA, 6–8 July 2016; pp. 3789–3795. [Google Scholar]
- Shao, J.; Xu, Y. Cooperative Combat Decision-making Research for Multi UAVs. Inf. Control 2018, 47, 347–354. [Google Scholar]
- Nessah, R.; Tian, G. On the existence of Nash equilibrium in discontinuous games. Econ. Theory 2016, 61, 515–540. [Google Scholar] [CrossRef] [Green Version]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, G.; Xu, W.; Li, Z.; Liu, Y.; Liu, X. Research on the Multi-Robot Cooperative Pursuit Strategy Based on the Zero-Sum Game and Surrounding Points Adjustment. Machines 2021, 9, 187. https://doi.org/10.3390/machines9090187
Chen G, Xu W, Li Z, Liu Y, Liu X. Research on the Multi-Robot Cooperative Pursuit Strategy Based on the Zero-Sum Game and Surrounding Points Adjustment. Machines. 2021; 9(9):187. https://doi.org/10.3390/machines9090187
Chicago/Turabian StyleChen, Gang, Wenqian Xu, Zixing Li, Yuqiang Liu, and Xin Liu. 2021. "Research on the Multi-Robot Cooperative Pursuit Strategy Based on the Zero-Sum Game and Surrounding Points Adjustment" Machines 9, no. 9: 187. https://doi.org/10.3390/machines9090187
APA StyleChen, G., Xu, W., Li, Z., Liu, Y., & Liu, X. (2021). Research on the Multi-Robot Cooperative Pursuit Strategy Based on the Zero-Sum Game and Surrounding Points Adjustment. Machines, 9(9), 187. https://doi.org/10.3390/machines9090187